Настоящее изобретение относится к способу улучшения вычисления скорости движения железнодорожного транспортного средства в условиях, когда все оси вагона находятся в состоянии боксования по причине ухудшения условий сцепления с рельсами.
Самая точная информация о скорости движения железнодорожного транспортного средства представляет исключительную важность, например, для систем управления движением, к которым относятся противобоксовочные системы, а также для одометрических бортовых приборов.
Известный способ точного определения скорости движения железнодорожного транспортного средства заключается в поддержании «мертвой» оси, которая не подвержена действию тягового или тормозного усилия, поэтому скорость движения именно этой оси наилучшим образом характеризует действительную скорость движения упомянутого транспортного средства. Данное решение является весьма эффективным при чрезвычайно низком коэффициенте сцепления колем с рельсами, когда при разгоне или торможении все колеса могут оказаться в условиях боксования и, таким образом, измерение скорости их вращения не будет являться точной информацией о действительной скорости движения транспортного средства. В этом случае «мертвая» ось, которая не подвержена действию тягового или тормозного усилия, по-прежнему будет являться надежным индикатором скорости транспортного средства.
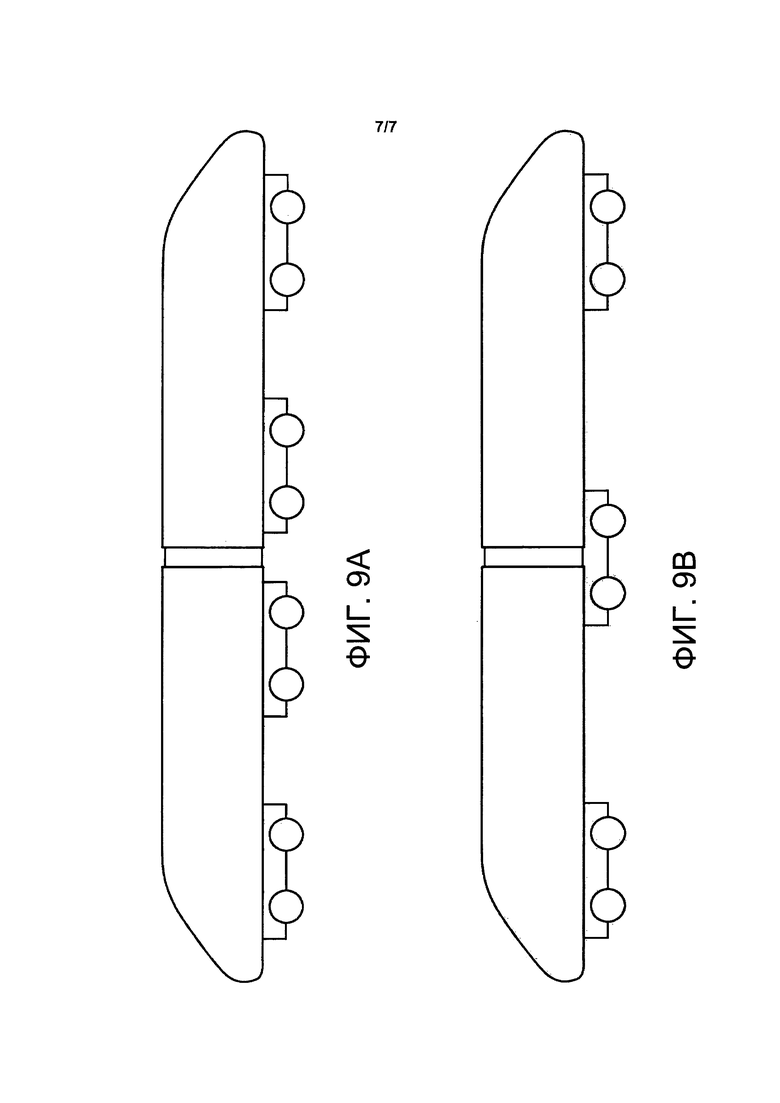
Современная конструкция железнодорожных транспортных средств, в частности если речь идет о метропоездах, предполагает значительное ограничение состава транспортного средства, например, современные метропоезда состоят всего лишь из двух вагонов. В этом случае наличие «мертвой» оси может привести к значительным потерям эффективности разгона и торможения поезда.
Фигура 9А прилагаемых чертежей иллюстрирует состав из двух независимых вагонов, а на фигуре 9 В представлен состав из двух вагонов, соединенных посредством тележки Якобса: очевидно, что использование «мертвой» оси снижает эффективность разгона и торможения на 12,5% в первом случае и на 16,7% во втором случае.
Таким образом, задача настоящего изобретения состоит в том, чтобы предложить новый способ, который позволит не только полностью нивелировать последствия использования «мертвой» оси в целях разгона и торможения даже в условиях чрезвычайно низкого коэффициента сцепления, увеличив тем самым эффективность разгона и торможения поезда, но и обеспечит возможность применения упомянутой оси для правильного отслеживания скорости поезда с целью точной оценки скорости движения.
Описание настоящего изобретения относится к особому случаю торможения, осуществляемого средствами противобоксовочной системы. Специалисты в данной техники области могут, однако, с легкостью понять способ внедрения настоящего изобретения посредством независимой системы. Также специалисты в данной области техники могут понять двойное применение, относящееся к способу разгона, к которому и относится последующая формула изобретения настоящего применения.
Задача, которая определена выше, достигается в соответствии с изобретением с помощью способа, основные отличительные признаки которого определены в пункте 1.
Дополнительные признаки и преимущества изобретения станут очевидными из последующего подробного описания, предоставляемого исключительно в качестве неограничивающего примера со ссылкой на следующие прилагаемые чертежи, на которых:
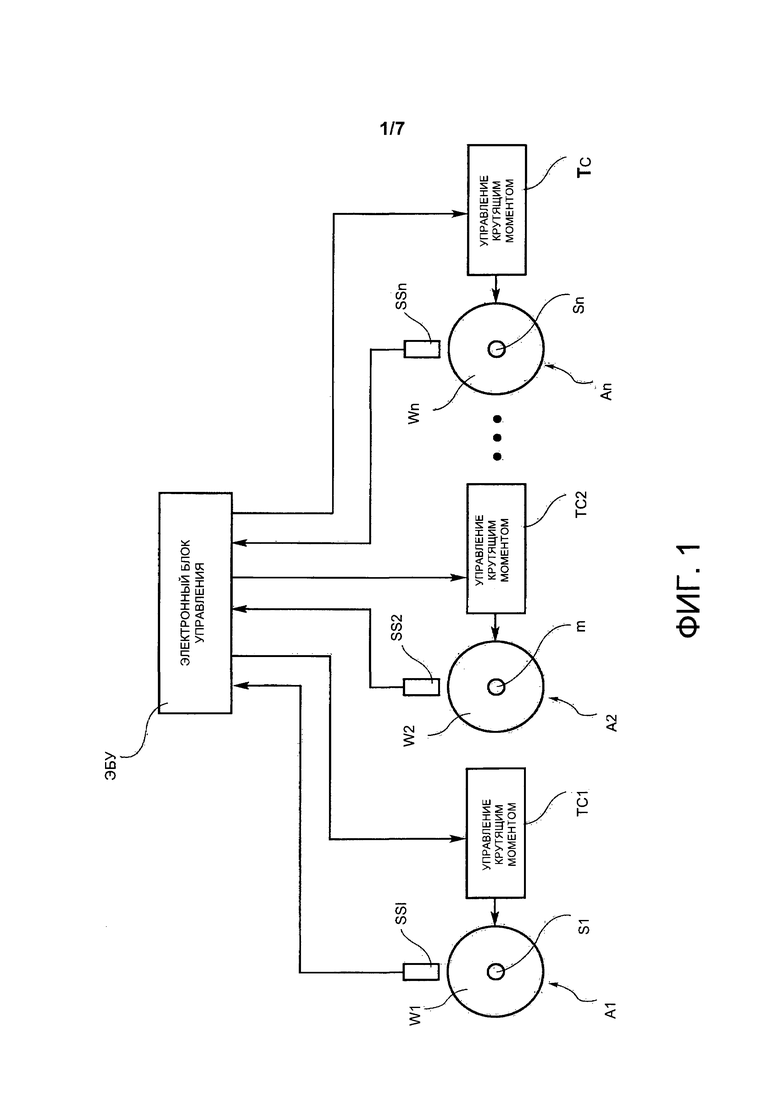
- фигура 1 иллюстрирует функциональную схему противобоксовочной системы управления колесами железнодорожного транспортного средства;
- фигура 2 иллюстрирует функциональную схему замкнутой системы управления частотой вращения оси;
- фигура 3 иллюстрирует график, качественно отображающий тенденцию изменения коэффициента сцепления μ колес оси (ось у) в зависимости от боксования δ (ось х);
- на фигуре 4 представлена диаграмма, иллюстрирующая силы, действующие на колесо оси;
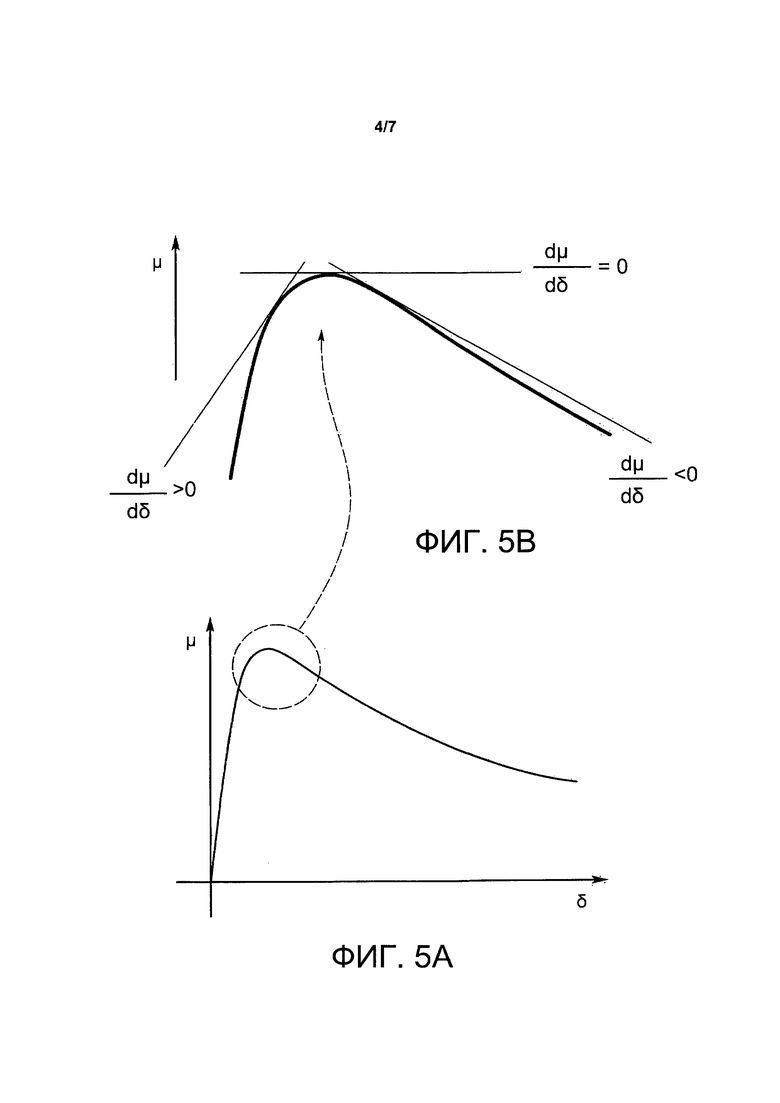
- на фигурах 5А и 5В представлены графики, используемые для подробного описания управляющего критерия, к которому относится настоящее изобретение, фигура 5В иллюстрирует увеличенный вид части графика, изображенного на фигуре 5А;
- фигуры 6, 7 и 8 представляют собой функциональные схемы различных систем, предназначенных для внедрения способа в соответствии с настоящим изобретением, и
- фигура 9А, описание которой уже было дано выше, иллюстрирует поезд из двух независимых вагонов, а фигура 9В, как уже тоже было упомянуто выше, иллюстрирует поезд из двух вагонов, соединенных с помощью тележки Якобса.
На самые современные версии железнодорожных транспортных средств устанавливаются электронные бортовые системы, к которым, как правило, относятся подсистемы управления боксованием колеса, средства которых участвуют в управлении транспортным средством как при разгоне, так и на этапе торможения. Эти подсистемы известны как противобоксовочные системы, или системы препятствующие проскальзыванию, или также как WSP-системы (системы пневмоюзовой защиты колес).
Система для управления сцеплением колес в качестве противобоксовочной функции, в соответствии с известным уровнем техники, схематически представлена на фигуре 1 прилагаемых чертежей, которая рассматривает транспортное средство с числом управляемых осей n: A1, А2, …, An. Оси A1, А2, …, An содержат соответственно валы S1, S2, …, Sn и соответствующие колесные пары W1, W2, …, Wn, каждая из которых неотъемлемо участвует во вращении вала.
На чертежах, как правило, показана только одно колесо каждой оси.
WSP-система, показанная на фигуре 1, содержит электронный блок управления (ЭБУ), обладающий микропроцессорной архитектурой, который получает от тахометров сигналы с информацией об угловой скорости каждой из осей A1, А2, … An, регистрируемой датчиками SS1, SS2, …, SSn, устанавливаемыми на каждой из осей соответственно. Электронный блок управления (ЭБУ) также соединен с приборами регулирования крутящего момента TC1, ТС2, …, TCn, каждый из которых подключен к соответствующей оси A1, А2, …, An.
Электронный блок управления (ЭБУ) предназначен для управления изменением крутящего момента, приложенного к каждой оси, в соответствии с заданным алгоритмом, если, в случае применения крутящего момента на стадии разгона или на стадии торможения при ухудшении сцепления, колеса одной или нескольких осей оказываются на грани начального условия скольжения. Регулирование крутящего момента осуществляется таким образом, чтобы предотвратить полную блокировку осей и, если это возможно, то таким образом, чтобы привести каждую ось к ситуации контролируемого боксования с расчетом на восстановление сцепления, но в любом случае в течение всей ситуации ухудшения сцепления.
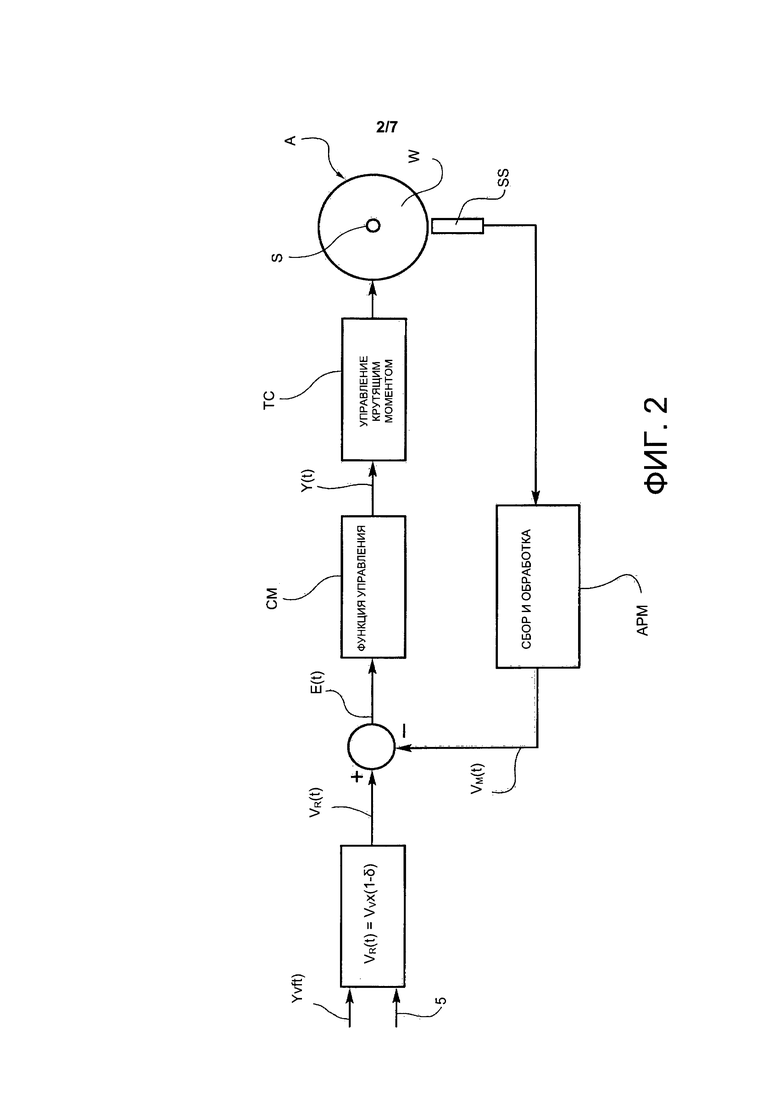
На фигуре 2 представлена функциональная схема, иллюстрирующая систему управления сцеплением / восстановления сцепления для оси общего назначения: погрешность или разница E(t) между исходным значением скорости VR(t), при котором, как предполагается, начинает происходить боксование колес управляемой оси А, и измеренным значением скорости VM(t), зарегистрированным соответствующим датчиком SS и прошедшим обработку в модуле сбора и обработки данных (АРМ), выступает в качестве входного сигнала для модуля управления (СМ), выходные данные которого представляют собой управляющий сигнал Y(t) для прибора управления крутящим моментом ТС, относящегося к оси А.
Значение исходной скорости VR(t) рассчитывается в качестве составляющей мгновенного значения скорости транспортного средства, например, с использованием следующей формулы:

где VV(t) - мгновенное (расчетное) значение скорости транспортного средства, а δ - соответствующий коэффициент скольжения оси А, зарегистрированный на этапе боксования.
Очевидно, что наличие сведений о мгновенной скорости транспортного средства VV(t) представляет большую важность для должного управления боксованием.
При торможении для оценки действительной скорости транспортного средства VV(t) чаще всего используется алгоритм, предполагающий применение функции следующего типа:

тогда как при разгоне применяется функция типа:

где amax - максимально разрешенное в эксплуатации ускорение транспортного средства, значение указывается со знаком «+» в случае разгона, и со знаком «-» в условиях торможения.
Выражение  в равенствах (2), (3) служит для ограничения диапазона изменения значений VV(t) в пределах технических возможностей поезда при чрезмерных колебания мгновенных и совпадающих значений скорости осей, которые могут возникнуть, в частности, при значительном уменьшении коэффициента сцепления при разгоне или торможении, что может стать причиной потери значимости значения скорости Vv(t), рассчитанного по формулам (2), (3).
в равенствах (2), (3) служит для ограничения диапазона изменения значений VV(t) в пределах технических возможностей поезда при чрезмерных колебания мгновенных и совпадающих значений скорости осей, которые могут возникнуть, в частности, при значительном уменьшении коэффициента сцепления при разгоне или торможении, что может стать причиной потери значимости значения скорости Vv(t), рассчитанного по формулам (2), (3).
Существуют более точные версии выражений (2), (3), но в качестве основы для расчета в них также используются измеренные мгновенные значения скорости перемещения осей. Становится очевидным, насколько наличие «мертвой» оси значительно повышает точность формул (2), (3), если бы при боксовании момент прилагается ко всем осям.
В качестве неограничивающего примера один из возможных вариантов осуществления изобретения прибора управления крутящим моментом, прилагаемым к оси, описан и проиллюстрирован в опубликованной ранее итальянской заявке на получение патента №102015000086465, которая была подана 22 декабря 2015 года.
Прибор управления крутящим моментом может изготавливаться в соответствии с различными вариантами, известными специалистам в данной области техники.
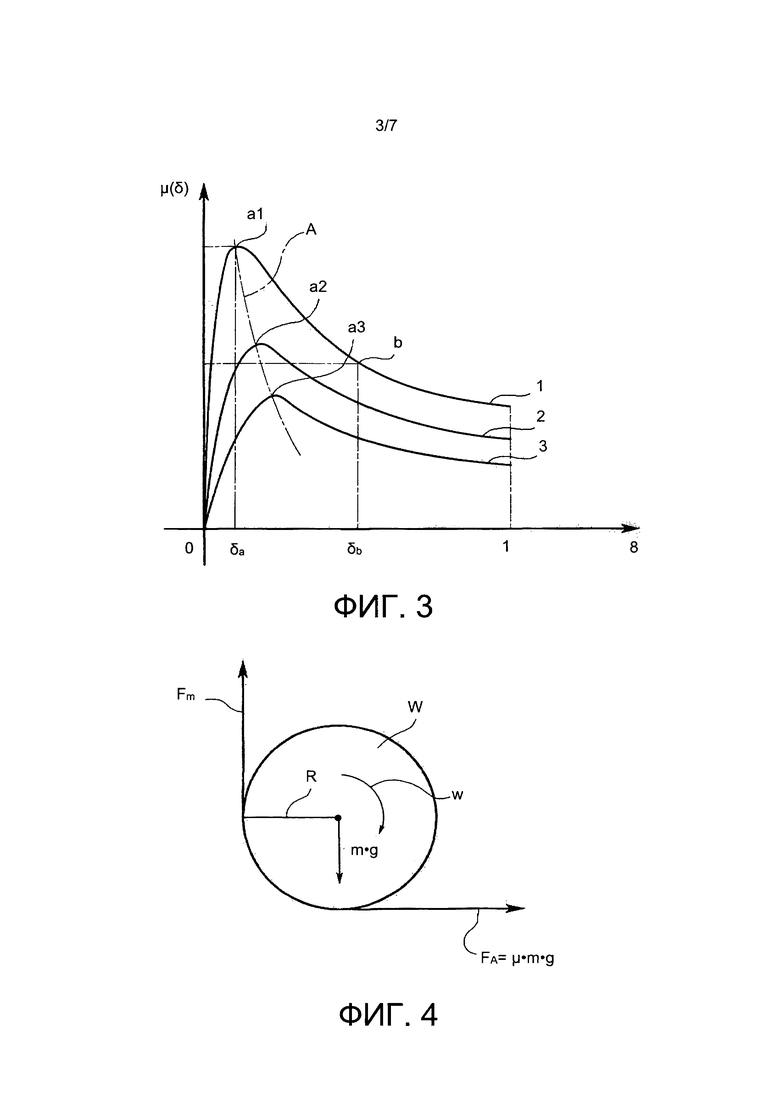
Как известно, коэффициент сцепления μ(δ) между колесами и рельсами изменяется в зависимости от боксования δ по существу таким образом, как показано на фигуре 3. С учетом формулы (1) выше δ может быть выражено в виде следующего отношения:
где 0≤Vr≤Vv и 0≤δ≤1.
На фигуре 3 кривые 1, 2 и 3 качественно представляют изменение величины сцепления в зависимости от условий окружающей среды: кривая 1 соответствует условиям сцепления в случае сухого контакта между колесами и рельсами; кривая 2 соответствует условиям сцепления при наличии влаги между колесами и рельсами; а кривая 3 отображает условия сцепления при наличии между колесами и рельсами вязкого вещества, такого как масло или прелые листья (типовые условия при наступлении осени) или даже смесь ржавчины с водой (типовые условия в железнодорожных депо).
Экспериментальным путем было установлено, что значения δ при пиковых значениях сцепления a1, а2, а3 варьируются с изменением условий сцепления, двигаясь вдоль кривой, как показано с помощью кривой А на фигуре 3.
Экспериментальные измерения подтверждают тот факт, что кривая А проходит на участке, границы которого по оси х описываются неравенством 0≤δ≤0,02, даже в случае значительного ухудшения условий сцепления.
Если одну или несколько осей, например, ось, ранее определенную как «мертвая» ось, можно поддерживать на кривой А при разгоне или торможении, то для упомянутых осей достигается двойной эффект от использования максимально доступного сцепления в сочетании с одновременным отслеживанием действительной скорости поезда, соответствующей δ=0 при максимальной погрешности 2%.
Схематичное изображение на фигуре 4 иллюстрирует силы, действующие на колес оси А. Из этой фигуры становится очевидным, что:

где:

поэтому:

где Fm - тангенциальное усилие, прилагаемое к колесу средствами системы тяги или торможения, R - радиус колеса, J - момент инерции оси, m - масса, действующая на зону контакта колеса и рельса,  - мгновенное значение углового ускорения оси.
- мгновенное значение углового ускорения оси.
Очевидно, что при одном и том же мгновенном значении углового ускорения максимальное прилагаемое усилие Fm достигается в соответствии с максимальным значением сцепления μ, то есть в точках, лежащих на кривой А, которая изображена на фигуре 3.
Способ в соответствии с настоящим изобретением предполагает использование следящего за сцеплением устройства, предназначенного для оценки в режиме реального времени значения μ в зоне контакта колес и рельсов для одной или нескольких осей при боксовании и для обработки в режиме реального времени зарегистрированных значений μ с целью определения в непрерывном режиме значения δ, сведения о котором должны направляться в адрес системы управления боксованием.
Следящее за сцеплением устройство, выполненное с возможностью динамического определения мгновенного значения μ(Tj) сцепления с типовым периодом выборки Tj, длительность Т которого определена заранее, в зоне контакта колеса и рельса при боксовании, может быть определено уравнением (7), из которого, выполнив ряд простых шагов, получается следующее отношение:

где
 - угловое ускорение оси, то есть производная по времени угловой скорости со оси; значение этого ускорения уже известно в режиме реального времени средствам системы управления сцеплением и восстановления сцепления, так как угловое ускорение является одной из переменных, значения которой, как правило, лежат в основе работы функции управления, реализуемой БУ, изображенном на фигуре 2, в рамках управления боксованием оси; знак
- угловое ускорение оси, то есть производная по времени угловой скорости со оси; значение этого ускорения уже известно в режиме реального времени средствам системы управления сцеплением и восстановления сцепления, так как угловое ускорение является одной из переменных, значения которой, как правило, лежат в основе работы функции управления, реализуемой БУ, изображенном на фигуре 2, в рамках управления боксованием оси; знак  определяется происходящим в конкретный момент времени процессом: ускорением или замедлением оси;
определяется происходящим в конкретный момент времени процессом: ускорением или замедлением оси;
m - масса, действующая на зону контакта колеса и рельса; в поездах самого последнего поколения значение m известно в режиме реального времени, так как эти сведения обычно имеются в распоряжении системы, выполняющей расчет усилия ускорения/торможения, прилагаемого к оси для достижения требуемого ускорения или торможения;
J - момент инерции оси, то есть параметр, значение которого всегда известно и оно указывается производителем вагонов в соответствующей документации, так как представляет собой один из самых главных параметров для расчета тормозного пути.
упомянутое Fm, уже определенное выше в связи с фигурой 4, может быть получено путем умножения давления, приложенного к тормозному цилиндру, известному тормозной системе, на коэффициенты преобразования давления/силы, характерные для тормозного цилиндра, а также коэффициенты передачи и КПД рычагов и коэффициента трения между тормозными накладками и дисками (в случае дисковых тормозов); в случае электродинамического типа тяги или торможения, значение силы Fm может быть получено из значения электрического тока, подаваемого/регенериуемого электродвигателем при тяге или, соответственно, при торможении; а в случае так называемого «смешанного» торможения, интенсивность силы Fm может быть определена как сумма соответствующих составляющих от пневматического тормоза и электродинамического тормоза, взвешенных с учетом необходимых коэффициентов;
Tj - обобщенное j-oe значение для длительности периода выборки значений в системе, в течение которого следящее за сцеплением устройство, а в более общем плане - способ в соответствии с данным изобретением, проводит выборку; в нижеследующем описании Tj заменит использование переменной t, представляющей время.
После следящего за сцеплением устройства в схеме может быть предусмотрен фильтр низкочастотного типа для удаления или, по меньшей мере, смягчения мгновенных изменений и шума, присутствующих за пределами частотной полосы, представляющей интерес для корректного отслеживания значений сцепления.
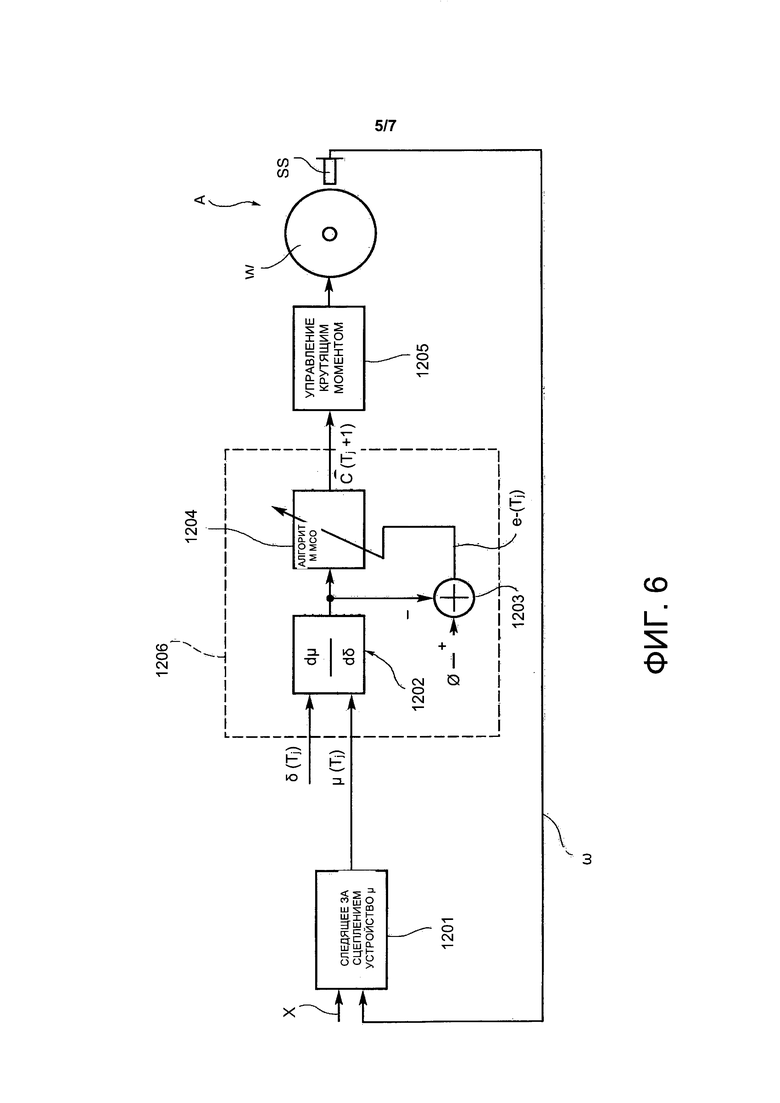
Вариант осуществления изобретения системы для внедрения способа в соответствии с настоящим изобретением проиллюстрирован фигурой 6.
Способ предусматривает определение и отслеживание значения боксования δ по меньшей мере одной оси таким образом, чтобы кривая μ(δ), изображенная на фигуре 5, отображала максимальное значение, то есть значение δ, для которого 
С этой целью может использоваться система, основу работы которой составляет алгоритм МСО (минимальной среднеквадратичной ошибки). Для точного описания основных признаков критерия сходимости и вариантов реализации алгоритмов МСО, см. соответствующие научные публикации и, в частности, книгу Бернарда Уидроу и Самьюэля Д Стирнз, «Адаптивная обработка сигналов», Нью-Джерси, Prentice-Hall, Inc., 1985.
Со ссылкой на фигуру 6 следящее за сцеплением устройство 1201 получает входные сигналы, содержащие информацию о значении скорости ω колеса управляемой оси An, для которой должно поддерживаться пиковое значение сцепления, в сочетании с вектором X, содержащим значения параметров m(Tj), J, R и Fm(Tj), описание которых дано выше, для проведения оценки мгновенного значения сцепления μ(Tj) применительно к управляемой оси.
Выход следящего за сцеплением устройства 1201 подсоединяется ко входу модуля 1202, выполняющего расчет значения производной  например, в соответствии со следующим уравнением:
например, в соответствии со следующим уравнением:
где значение δ рассчитывается в режиме реального времени по формуле (4).
Сумматор 1203 выдает сигнал погрешности e(Tj) в качестве разницы между требуемым значением упомянутой производной (то есть значением 0) и ее моментальным значением, рассчитанным средствами модуля 1202, а затем эта погрешность используется для адаптации алгоритма МСО, реализованного в блоке 1204.
Выходным сигналом блока 1204 является запрос крутящего момента C(Tj+1) для упомянутой оси, передаваемый в адрес модуля 1205 управления крутящим моментом известного в чистом виде типа, обладающего, например, архитектурой, описание которой дано ранее в вышеупомянутой итальянской заявкой на патент со ссылкой на фигуру 3.
Модуль 1204 известным способом в непрерывном режиме осуществляет корректировку выходного сигнала C(Tj+1), чтобы свести к минимуму или нулю погрешность е(Т), то есть чтобы достичь обнуления упомянутой производной, то есть чтобы сцепление упомянутой управляемой оси достигло пикового значения и поддерживалось на этом уровне.
Таким образом, применяя решение в соответствии с фигурой 6 по меньшей мере к одной оси, можно быть уверенным в том, что линейная скорость продвижения упомянутой оси всегда будет равна линейной скорости транспортного средства (меньше максимальной погрешности, оценка которой может быть выполнена в пределах 2%) даже при очень низком значении коэффициента сцепления.
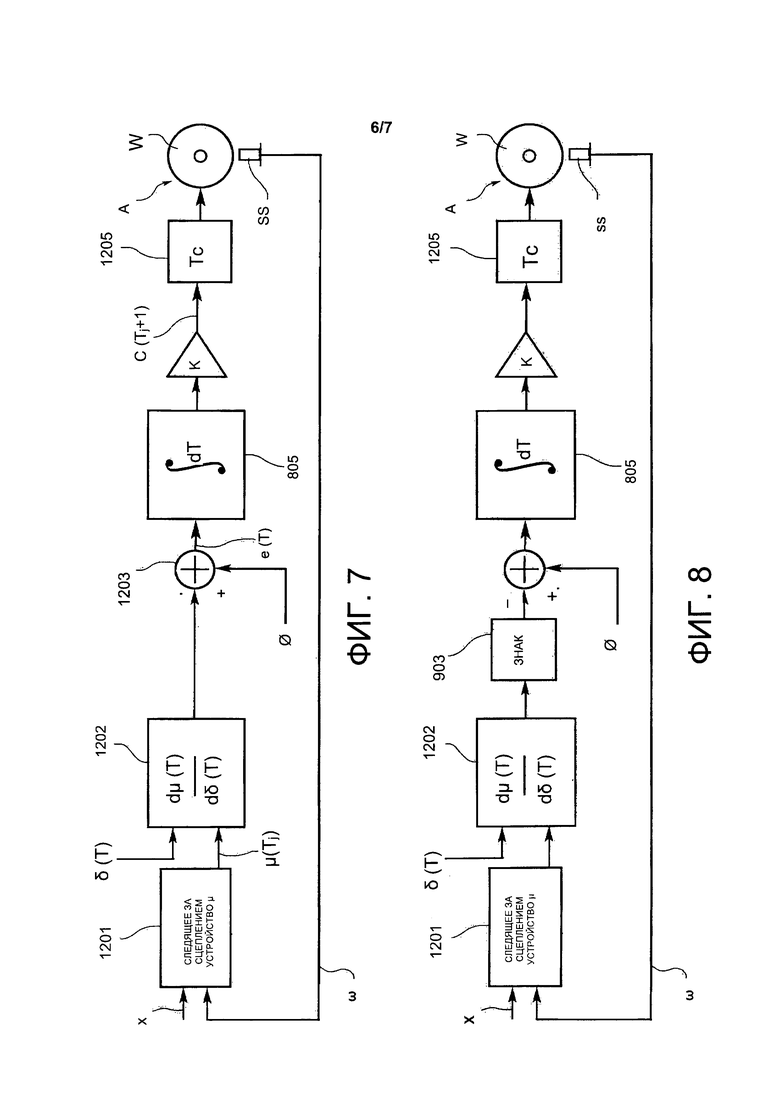
Упрощенный метод исполнения группы модулей, включенной в блок 1206, изображенный на фигуре 6 пунктирной линией, проиллюстрирован фигурой 7, на которой блок 1204, реализующий алгоритм МСО, заменен упрошенным интегратором 805, выходной сигнал которого, усиленный с учетом коэффициента K, генерирует значение C(Tj+1) крутящего момента, направляемого в адрес системы 1205 управления сцеплением и восстановления сцепления. В этом случае, если 
 интегратор 805 увеличивает значение C(Tj+1) крутящего момента, если
интегратор 805 увеличивает значение C(Tj+1) крутящего момента, если  то интегратор 805 уменьшает значение C(Tj+1) крутящего момента, а если
то интегратор 805 уменьшает значение C(Tj+1) крутящего момента, а если  то интегратор 805 сохраняет значение C(Tj+1) крутящего момента без изменений.
то интегратор 805 сохраняет значение C(Tj+1) крутящего момента без изменений.
В этом случае система обеспечивает достижение пикового значения сцепления для упомянутой управляемой оси и его поддержание.
Усиление K регулирует скорость идентификации среднего пикового значения сцепления μ и одновременно обеспечивает стабильность работы замкнутой системы.
Дополнительный упрощенный вариант осуществления изобретения блока 1206, изображенного на фигуре 6 пунктирной линией, представлен на фигуре 8: модуль 903 определяет знак производной  Выходной сигнал блока 903 равняется +1 или -1 (положительное или, соответственно, отрицательное значение), а установленный за блоком интегратор 805 осуществляет простое суммирование.
Выходной сигнал блока 903 равняется +1 или -1 (положительное или, соответственно, отрицательное значение), а установленный за блоком интегратор 805 осуществляет простое суммирование.
Вместо интегратора 805 может использоваться суммирующий или вычитающий счетчик, обновление показаний которого происходит с периодичностью Т=Tj+1-Tj.
Схемы в соответствии с фигурами 7 и 8 осуществляют непрерывное отслеживание среднего значения пикового сцепления μ и также непрерывно адаптируются к изменению условий сцепления, что весьма схоже с тем, что было достигнуто при использовании схемы в соответствии с фигурой 6. Схема в соответствии с фигурой 6 обеспечивает быстрое и точное отслеживание условия  , но требует использования конкретного количества вычислений в режиме реального времени.
, но требует использования конкретного количества вычислений в режиме реального времени.
Применение схемы в соответствии с фигурой 8 позволяет значительно сократить количество необходимых вычислений, но также снижает скорость отслеживания условия 
Схема в соответствии с фигурой 7 представляет собой промежуточный вариант между схемами согласно фигурам 6 и 8.
Поэтому две формулы (2), (3), представленные выше, всегда гарантируют получение очень надежного значения скорости VV транспортного средства, даже при значительном ухудшении условий сцепления.
Если преследуется цель дополнительного повышения точности отслеживания скорости поезда, достаточно рассчитать погрешность в отношении значений  то есть значений, лежащих в левой части кривой, изображенной на фигуре 5В, за счет значения прилагаемого крутящего момента, которое окажется ниже максимального пикового значения в зависимости от повышения исходного значения.
то есть значений, лежащих в левой части кривой, изображенной на фигуре 5В, за счет значения прилагаемого крутящего момента, которое окажется ниже максимального пикового значения в зависимости от повышения исходного значения.
Разумеется, не изменяя принцип настоящего изобретения, варианты осуществления изобретения и детали конструкции могут в значительной степени отличаться от тех, описание и изображение которых приведено исключительно в виде неограничивающего примера, не выходя при этом за пределы объема и содержания изобретения, определяемого в прилагаемой формуле изобретения.
Изобретение относится к средствам вычисления скорости движения железнодорожного транспортного средства в условиях боксования всех осей вагона. Способ включает этапы: формирование сигналов скорости, указывающих угловую скорость (ω) колес (W) упомянутой по меньшей мере одной оси (А); оценку в виде функции упомянутой угловой скорости (ω) значения сцепления (μ) в зоне контакта колес (W) упомянутой оси (А) и рельсов с использованием следящего за сцеплением устройства (1201) и расчет значения боксования (δ) скорости колес (W) упомянутой управляемой оси (А), формирование сигналов, представляющих производную  упомянутого сцепления (μ) в виде функции боксования (δ) колес (W) упомянутой оси (А); формирование управляющего сигнала (C(Tj+1)) для средств (1205) управления крутящим моментом, регулирующим величину крутящего момента, прилагаемого к колесам (W) упомянутой оси (А), посредством адаптивного управления (1204) упомянутыми производными сигналами
упомянутого сцепления (μ) в виде функции боксования (δ) колес (W) упомянутой оси (А); формирование управляющего сигнала (C(Tj+1)) для средств (1205) управления крутящим моментом, регулирующим величину крутящего момента, прилагаемого к колесам (W) упомянутой оси (А), посредством адаптивного управления (1204) упомянутыми производными сигналами  представляющими собой функцию сигнала погрешности (e((Tj+1)), указывающего на разницу между значением упомянутой производной
представляющими собой функцию сигнала погрешности (e((Tj+1)), указывающего на разницу между значением упомянутой производной  и заранее определенным исходным значением с тем, чтобы уменьшить значение этой разницы практически до нуля и сохранять это значение; приложение упомянутого управляющего сигнала (C(Tj+1)) к упомянутым средствам (1205) управления крутящим моментом с последующим расчетом скорости транспортного средства в виде линейной скорости движения упомянутой по меньшей мере одной оси (А). Достигается повышение точности оценки скорости движения. 4 з.п. ф-лы, 11 ил.
и заранее определенным исходным значением с тем, чтобы уменьшить значение этой разницы практически до нуля и сохранять это значение; приложение упомянутого управляющего сигнала (C(Tj+1)) к упомянутым средствам (1205) управления крутящим моментом с последующим расчетом скорости транспортного средства в виде линейной скорости движения упомянутой по меньшей мере одной оси (А). Достигается повышение точности оценки скорости движения. 4 з.п. ф-лы, 11 ил.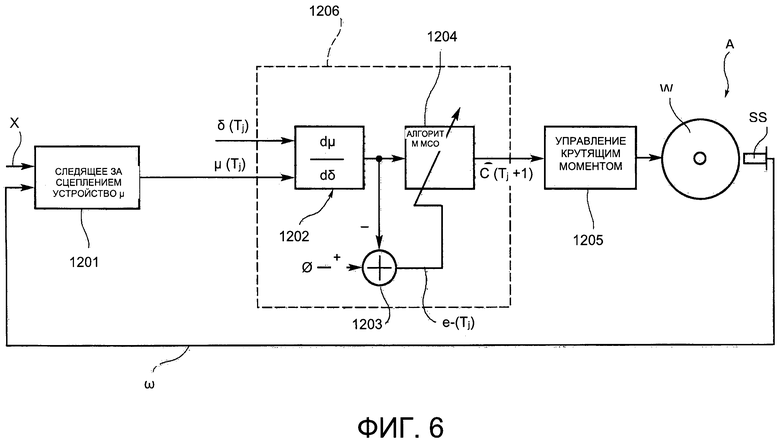
1. Способ вычисления или оценки скорости железнодорожного транспортного средства, по меньшей мере одна ось (А) которого оснащена соответствующей системой управления (SS, СМ, ТС, АРМ) сцеплением колес (W) с рельсами, содержащий следующие этапы:
формирование сигналов скорости, указывающих угловую скорость (ω) колес (W) упомянутой по меньшей мере одной оси (А); оценку в виде функции упомянутой угловой скорости (ω) значения сцепления (μ) в зоне контакта колес (W) упомянутой оси (А) и рельсов с использованием следящего за сцеплением устройства (1201) и расчет значения боксования (δ) скорости колес (W) упомянутой управляемой оси (А), формирование сигналов, представляющих производную  упомянутого сцепления (μ) в виде функции боксования (δ) колес (W) упомянутой оси (А); формирование управляющего сигнала (C(Tj+1)) для средств (1205) управления крутящим моментом, регулирующим величину крутящего момента, прилагаемого к колесам (W) упомянутой оси (А), посредством адаптивного управления (1204) упомянутыми производными сигналами
упомянутого сцепления (μ) в виде функции боксования (δ) колес (W) упомянутой оси (А); формирование управляющего сигнала (C(Tj+1)) для средств (1205) управления крутящим моментом, регулирующим величину крутящего момента, прилагаемого к колесам (W) упомянутой оси (А), посредством адаптивного управления (1204) упомянутыми производными сигналами  представляющими собой функцию сигнала погрешности (e((Tj+1)), указывающего на разницу между значением упомянутой производной
представляющими собой функцию сигнала погрешности (e((Tj+1)), указывающего на разницу между значением упомянутой производной  и заранее определенным исходным значением с тем, чтобы уменьшить значение этой разницы практически до нуля и сохранять это значение; приложение упомянутого управляющего сигнала (C(Tj+1)) к упомянутым средствам (1205) управления крутящим моментом с последующим расчетом скорости транспортного средства в виде линейной скорости движения упомянутой по меньшей мере одной оси (А).
и заранее определенным исходным значением с тем, чтобы уменьшить значение этой разницы практически до нуля и сохранять это значение; приложение упомянутого управляющего сигнала (C(Tj+1)) к упомянутым средствам (1205) управления крутящим моментом с последующим расчетом скорости транспортного средства в виде линейной скорости движения упомянутой по меньшей мере одной оси (А).
2. Способ по п. 1, в котором упомянутый управляющий сигнал (C(Tj+1)) формируется посредством адаптивного фильтрации с применением алгоритма МСО.
3. Способ по п. 1, в котором упомянутый управляющий сигнал (C(Tj+1)) формируется путем интегрирования по времени производной  сцепления (μ) в виде функции боксования (δ).
сцепления (μ) в виде функции боксования (δ).
4. Способ по п. 1, в котором упомянутый управляющий сигнал (C(Tj+1)) формируется путем интегрирования по времени знака производной  сцепления (μ) в виде функции боксования (δ).
сцепления (μ) в виде функции боксования (δ).
5. Способ по любому из предшествующих пунктов, в котором упомянутое исходное значение равно нулю или превышает его.
| EP 0218839 A2, 22.04.1987 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| DE4225683 A1, 10.02.1994. | |||

