Изобретение в целом относится к способам оценки диаметра колеса транспортного средства, в частности железнодорожного транспортного средства.
Известно измерение диаметра или внешнего периметра колес поезда во время стоянки (например, в депо). Затем данные такого измерения вводят вручную в вычислительное устройство железнодорожного транспортного средства и обычно используют для вычисления его скорости и пройденного им расстояния на основании измерения вращения колеса.
Кроме того, системы железнодорожной сигнализации часто используют информацию о расстоянии поезда относительно отдельных точек пути и о максимальной допустимой скорости. Поэтому исключительно важно постоянно и с уверенностью точно знать положение и скорость поезда. Для этого необходимо постоянно располагать надежной и точной информацией о диаметре колеса, и значение этого диаметра используют для вычислений, позволяющих оценить положение и скорость поезда.
В этом контексте задача изобретения состоит в разработке способа, позволяющего оценивать величину, характеризующую диаметр колеса, постоянно и с достаточной точностью без ручного вмешательства оператора (потенциальный источник ошибок).
Поставленная задача решена в способе оценки, включающем в себя этапы, на которых:
- определяют первую величину, характеризующую производную углового ускорения колеса;
- определяют вторую величину, характеризующую производную ускорения транспортного средства;
- оценивают величину, характеризующую диаметр колеса, на основании первой и второй величин.
Действительно, некоторые датчики, применяемые для измерения ускорения транспортного средства, например инерциальные датчики, имеют погрешность измерения, которая по существу является постоянной за короткие периоды порядка нескольких минут. Производная измерения такого датчика не подвержена ошибкам по причине фактического постоянства этой погрешности. Таким образом, способ обеспечивает непрерывную, частую и точную автоматическую оценку величины, характеризующей диаметр колеса.
Величиной, характеризующей диаметр колеса, как правило, является диаметр колеса, или его периметр, или квадрат диаметра, или поправочный коэффициент диаметра или периметра, или любое другое значение, которое можно использовать, например, в программе вычисления положения и скорости поезда или транспортного средства.
Как правило, транспортным средством является поезд, например скоростной поезд, или междугородний поезд, или региональный поезд, или пригородный поезд, или метро, или трамвай. В варианте транспортным средством является любой другой тип транспортного средства, диаметр колеса которого может меняться.
Как правило, колесо является металлическим. В варианте колесо является колесом другого типа.
Предпочтительно первую величину оценивают при помощи датчика, измеряя угловое перемещение колеса.
Поезда оборудованы такими датчиками, поэтому первую величину можно вычислять на основании сигнала, поступающего от этих датчиков.
Например, указанный датчик содержит шестерню, неподвижно соединенную во вращении с колесом, и детектор, выполненный с возможностью подсчета числа зубьев, проходящих перед указанным детектором в течение заранее определенного периода времени. Шестерня закреплена непосредственно на колесе или закреплена на валу, неподвижно соединенном с колесом. Детектор является магнитным или оптическим детектором.
Зубья равномерно распределены вокруг шестерни. Первую величину определяют посредством вычисления на основании числа зубьев, проходящих перед детектором за каждый интервал времени. Этой первой величиной является, например, производная углового ускорения или тангенциального ускорения колеса.
Как правило, вторую величину оценивают при помощи инерциального датчика.
Этот тип датчика известен также под названием акселерометра. Этот тип датчика предназначен, в частности, для оценки ускорения транспортного средства и его производной.
В варианте производную ускорения транспортного средства можно вычислять на основании данных, получаемых при помощи системы GPS или любой другой соответствующей системы, такой как радар с доплеровским эффектом, или лазерный телеметр, или лидар, или камера (вычисление расстояния посредством обработки изображения).
Как правило, инерциальный датчик определяет первое ускорение транспортного средства в первом направлении, параллельном направлению нормального перемещения транспортного средства, при этом вторую величину оценивают на основании указанного первого ускорения.
В варианте осуществления способ использует только первое ускорение. Производную ускорения транспортного средства вычисляют на основании значений первого ускорения, периодически измеряемых инерциальным датчиком. Этот вариант является исключительно простым и надежным.
Вместе с тем, в небольшом количестве случаев он имеет погрешности:
- при изменении угла наклона пути, по которому движется транспортное средство;
- когда первое ускорение измеряют в первом направлении, которое не является строго параллельным направлению перемещения транспортного средства;
- на криволинейных участках, в частности, когда путь имеет поперечный наклон, то есть наклонен к центру кривизны;
- в случае использования доплеровского радара, когда проходят по металлическому мосту или когда скорость является относительно низкой;
- в случае использования лазерного телеметра или лидара, когда вдоль пути нет неподвижного объекта;
- в случае использования камеры во время изменения контраста, например, на входе или на выходе туннеля;
- в случае использования системы GPS, когда проходят под мостом или в туннеле.
Предпочтительно инерциальный датчик транспортного средства определяет вторую скорость вращения вокруг второго направления, при этом второе направление по существу параллельно плоскости качения транспортного средства и перпендикулярно к первому направлению, при этом вторую величину оценивают на основании первого ускорения и на основании второй скорости вращения.
Это позволяет повысить точность способа в зонах, где угол наклона пути не является постоянным.
Действительно, в зонах, где путь не является плоским, то есть где он имеет угол наклона (подъем или спуск), сила тяжести способствует ускорению транспортного средства в первом направлении. Иначе говоря, сила тяжести имеет не равную нулю составляющую в первом направлении. В момент, когда меняется угол наклона пути, воздействие силы тяжести меняется, что оказывает влияние на производную измеряемого ускорения транспортного средства.
Изменение угла наклона пути обнаруживают на основании информации, измеряемой инерциальным датчиком и соответствующей второй скорости вращения транспортного средства.
Таким образом, для вычисления второй величины способ использует первое ускорение, измеряемое в первом направлении, с поправкой на влияние силы тяжести. В альтернативном варианте этап оценки величины, характеризующей диаметр колеса, не осуществляют, когда инерциальный датчик обнаруживает изменение угла наклона пути.
Согласно другому варианту осуществления, инерциальный датчик определяет первую, вторую и третью скорости вращения транспортного средства соответственно вокруг первого направления, вокруг второго направления, по существу параллельного плоскости качения транспортного средства и перпендикулярного к первому направлению, и вокруг третьего направления, по существу перпендикулярного к плоскости качения транспортного средства, при этом вторую величину оценивают на основании первого ускорения и на основании первой, второй и третьей скоростей вращения.
Учет первой, второй и третьей скоростей вращения позволяет повысить точность способа за счет идентификации ориентации транспортного средства. В частности, на входе и на выходе из виража поперечный наклон увеличивается или уменьшается. При этом поведение транспортного средства близко к поведению в случае изменения угла наклона пути. Во время этапа оценки величины, характеризующей диаметр колеса, определение первой, второй и третьей скоростей вращения позволяет дифференцировать случай виража с поперечным наклоном и случай изменения угла наклона пути. В альтернативном варианте, этап оценки величины, характеризующей диаметр колеса, не осуществляют, когда инерциальный датчик обнаруживает, что транспортное средство находится на вираже с поперечным наклоном.
Согласно еще одному варианту осуществления, инерциальный датчик определяет второе ускорение транспортного средства во втором направлении, по существу параллельном плоскости качения транспортного средства и перпендикулярном к первому направлению, и/или определяет третье ускорение в третьем направлении, по существу перпендикулярном к плоскости качения транспортного средства, при этом вторую величину оценивают на основании первого ускорения и на основании второго и/или третьего ускорений.
Это позволяет повысить точность способа, в частности, в случае, когда первое ускорение измеряют в направлении, которое не точно соответствует направлению нормального перемещения транспортного средства. Это соответствует случаю, когда инерциальный датчик установлен с небольшим смещением относительно направления перемещения поезда. Обычно первое направление точно соответствует направлению нормального перемещения транспортного средства. Вместе с тем, первое направление может быть смещено в угловом направлении параллельно плоскости качения относительно направления перемещения транспортного средства. Оно может также иметь перекос относительно этого направления перемещения, то есть может быть смещено вверх или вниз относительно направления перемещения, то есть может не быть параллельным плоскости качения.
Учет ускорения, измеряемого во втором направлении, позволяет оценивать смещение инерциального датчика в первом случае, то есть в случае, когда первое направление смещено относительно направления перемещения транспортного средства только параллельно плоскости качения. Учет третьего ускорения позволяет оценивать смещение датчика во втором случае. Эти смещения можно учитывать при вычислении второй величины.
Следует отметить, что эти смещения по существу являются постоянными. Нет необходимости оценивать их непрерывно. Например, их оценивают периодически, когда транспортное средство покидает стоянку, следуя по прямой линии.
Согласно второму отличительному признаку изобретения, способ содержит этап проверки отсутствия пробуксовки или заклинивания колеса.
Пробуксовка и заклинивание являются двумя случаями, когда колесо скользит по поверхности качения, например, по рельсу в случае железнодорожного транспортного средства. Скольжение может сопровождаться или не сопровождаться качением. Иначе говоря, это касается двух случаев, когда линейная скорость колеса меньше или больше скорости перемещения транспортного средства в первом направлении.
В случае обнаружения пробуксовки или заклинивания колеса способ не вычисляет величину, характеризующую диаметр колеса. Действительно, в этом случае отсутствует пропорциональность между производной углового ускорения колеса и производной ускорения транспортного средства.
Информация об отсутствии или присутствии пробуксовки или заклинивания поступает непосредственно в бортовое вычислительное устройство управления транспортным средством.
Предпочтительно способ содержит этап сравнения второй величины с заранее определенным пределом, чтобы не допустить оценки величины, характеризующей диаметр колеса, на основании первой и второй величин, когда вторая величина меньше заранее определенного предела.
Действительно, во время этой оценки определяют соотношение между первой величиной и второй величиной, при этом вторая величина находится в знаменателе. Когда вторая величина является слишком малой и даже нулевой, вычисление невозможно или же возможность ошибок является слишком высокой.
Иначе говоря, способ является исключительно точным в фазах ускорения и замедления транспортного средства, например, при трогании с места или при подходе к станции.
Предпочтительно способ содержит этап фильтрации величины, характеризующей диаметр колеса.
Поставленная задача решена также в блоке оценки величины, характеризующей диаметр колеса транспортного средства, при этом блок содержит:
- устройство определения первой величины, характеризующей производную углового ускорения колеса;
- устройство определения второй величины, характеризующей производную ускорения транспортного средства;
- устройство оценки величины, характеризующей диаметр колеса, на основании первой и второй величин.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве неограничивающего примера, со ссылками на прилагаемые чертежи.
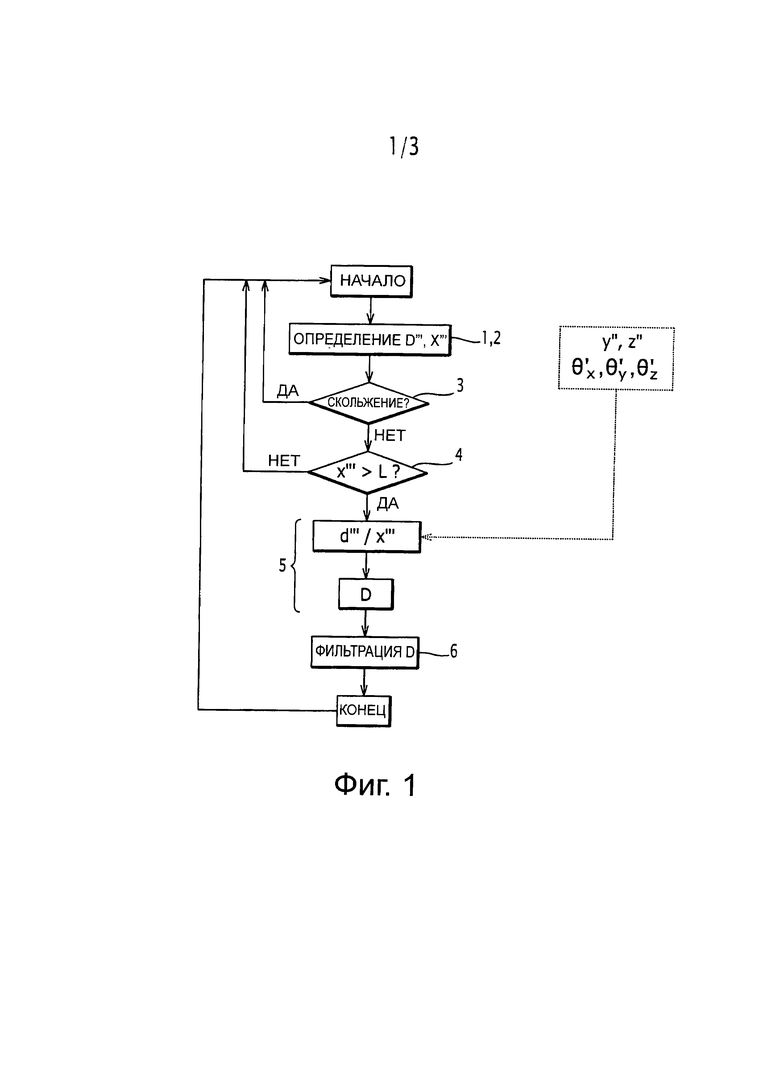
На фиг.1 показана диаграмма, схематично иллюстрирующая основные этапы способа;
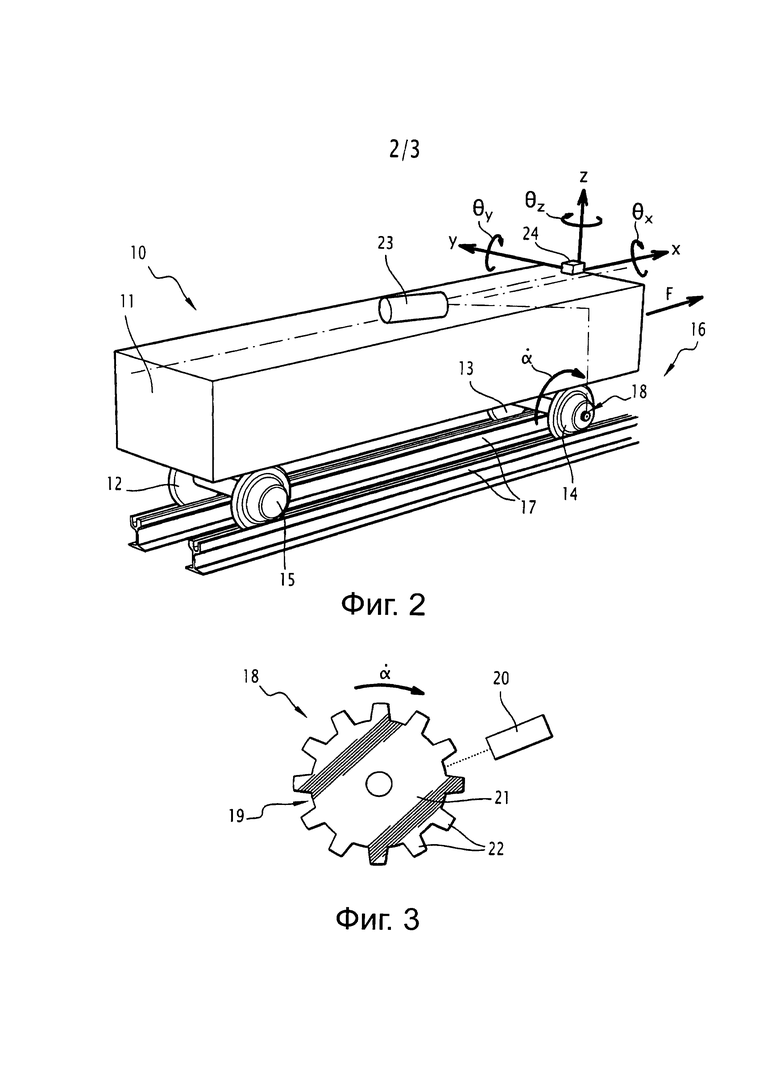
на фиг.2 показано транспортное средство, оборудованное устройством в соответствии с изобретением, упрощенный схематичный вид;
на фиг.3 показан датчик, предназначенный для измерения скорости вращения колес транспортного средства, упрощенный схематичный вид;
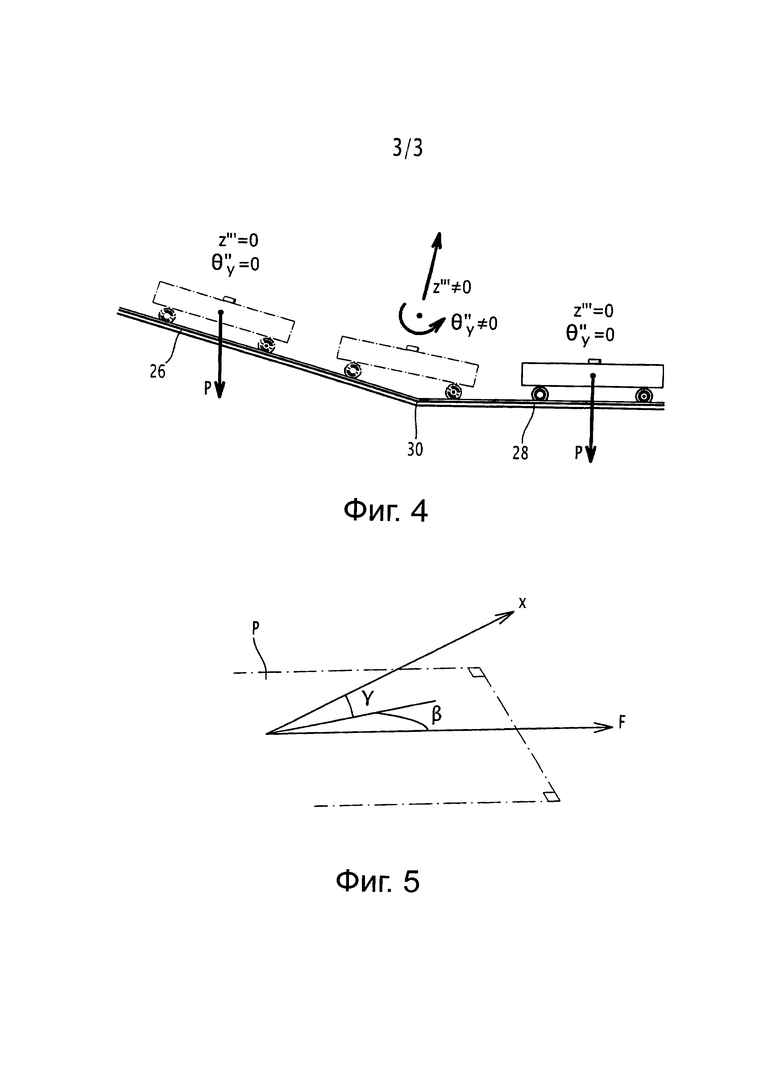
на фиг.4 показано транспортное средство, перемещающееся по пути с переменным углом наклона, упрощенный схематичный вид;
на фиг.5 показана схема смещения по ориентации между первым ускорением и направлением перемещения транспортного средства.
Способ, представленный на фиг.1, предназначен для вычисления диаметра колеса транспортного средства и, в частности, железнодорожного транспортного средства, оснащенного металлическими колесами.
Диаметр колес такого транспортного средства в основном меняется в результате механической обработки колес, периодически осуществляемой в депо, или при изменениях профиля колеса, например, в результате блокировки колеса во время торможения.
Как правило, поезд содержит большое количество колес, например по четыре или по восемь колес на каждый вагон. Способ применяют для каждого колеса поезда. В варианте способ применяют только для некоторых колес поезда, например для одного колеса на вагон, или только для одного колеса. Обычно для каждого соответствующего колеса определяют первую величину, характеризующую производную углового ускорения колеса. С другой стороны, для каждого из колес поезда используют одну и ту же вторую величину, характеризующую производную ускорения транспортного средства.
Диаметр колеса, оцениваемый при помощи заявленного способа, соответствует среднему диаметру, рассматриваемому относительно части периметра колеса и даже всего периметра колеса.
Способ непрерывно осуществляет этапы, показанные на фиг.1.
В дальнейшем тексте описания α', αʺ и αʺ' соответственно обозначают угловую скорость и ее первую и вторую производные, x', xʺ и xʺ' соответственно обозначают линейную скорость транспортного средства вдоль оси x и ее первую и вторую производные.
Способ содержит следующие этапы:
1) проверка отсутствия пробуксовки или заклинивания колеса;
2) определение первой величины, характеризующей производную углового ускорения колеса αʺ';
3) определение второй величины, характеризующей производную ускорения транспортного средства xʺ';
4) проверка превышения заранее определенного предела второй величиной;
5) оценка величины, характеризующей диаметр колеса, на основании первой и второй величин;
6) фильтрация величины, характеризующей диаметр колеса.
Этапы 1) и 2) запускают одновременно или почти одновременно.
Для определения первой величины используют датчик, измеряющий угловое перемещение колеса за единицу времени. Для определения второй величины обычно используют инерциальный датчик, установленный на борту транспортного средства.
На фиг.2 показано транспортное средство 10, причем это транспортное средство может быть вагоном или локомотивом поезда и показано очень схематично. Это транспортное средство 10 содержит кузов 11, установленный на четырех колесах 12, 13, 14, 15. Путь 16, по которому движется транспортное средство, содержит два рельса 17, по которым катятся колеса 12, 13, 14 и 15. Способ предусмотрен для оценки диаметра колеса 14.
Датчик 18, используемый для измерения углового перемещения колеса за единицу времени, показан на фиг.3. Этот датчик содержит шестерню 19, неподвижно соединенную во вращении с колесом 14, и детектор 20. Шестерня 19 содержит ступицу 21 и множество зубьев 22, радиально выступающих относительно ступицы 21. Детектор 20 неподвижно соединен с кузовом и расположен вблизи шестерни 19. Датчик 18 выполнен таким образом, что отмечает каждый раз, когда зуб 22 проходит перед детектором 20.
Первой величиной, характеризующей производную углового ускорения колеса αʺ', является производная тангенциального ускорения колеса dʺ'.
Тангенциальную скорость d' колеса в момент Ti можно, в частности, вычислить при помощи следующей формулы:
d'=ni/N×Dπ/Δt,
где Δt является периодом измерения, N является общим числом зубьев шестерни 19, ni является числом зубьев, обнаруженных детектором 20 в момент Ti во время периода Δt, и D является теоретическим диаметром колеса. Тангенциальное ускорение dʺ можно вычислить при помощи следующей формулы:
dʺ=(ni-ni-1)/N×Dn/Δt2,
где ni-1 является числом зубьев, обнаруженных в момент Ti-1, то есть во время предыдущей выборки.
Производную тангенциального ускорения вычисляют, например, при помощи следующей формулы:
dʺ'=(ni-2×ni-1+ni-2)/N×Dπ/Δt3,
где ni-2 является числом зубьев, обнаруженных в момент Тi-2.
На практике датчик 18 направляет данные в вычислительное устройство 23, установленное на борту транспортного средства и осуществляющее вычисления, позволяющие определять производную тангенциального ускорения колеса dʺ'
Инерциальный датчик 24 установлен на борту транспортного средства. В первом варианте осуществления изобретения инерциальный датчик 24 установлен таким образом, чтобы измерять ускорение xʺ транспортного средства в первом направлении, параллельном направлению нормального перемещения транспортного средства. Первое направление, соответствующее направлению нормального перемещения транспортного средства вперед, показано на фиг.2 стрелкой x. На этой фигуре направление y соответствует поперечному направлению, при этом направления x и y образуют плоскость, параллельную плоскости качения транспортного средства. Направление z перпендикулярно к плоскости качения.
В первом варианте осуществления предполагают, что первое направление x является абсолютно параллельным направлению перемещения F транспортного средства, и пренебрегают погрешностью, которая может возникнуть в результате плохой установки датчика 24 и, в частности, плохого совмещения этого первого направления x относительно направления перемещения F транспортного средства.
Производную ускорения транспортного средства вычисляют следующим образом:
xʺ'=(xʺi-xʺi-1)Δt,
где Δt является периодом выборки, xʺi является ускорением, измеренным датчиком 24 в момент Тi, и xʺi-1 является ускорением, измеренным датчиком 24 в момент Тi-1, непосредственно предшествующий моменту Тi.
На практике значения, измеряемые датчиком 24, поступают в вычислительное устройство 23, которое вычисляет производную ускорения.
На этапе 3 проверяют, нет ли пробуксовки или заклинивания, посредством запроса вычислительного устройства, которое управляет транспортным средством и которым может быть вычислительное устройство 23. Эта информация присутствует в вычислительном устройстве, так как ее обычно используют в других алгоритмах, запрограммированных в вычислительном устройстве.
На этапе 4 вычислительное устройство сравнивает производную ускорения транспортного средства xʺ' определенную на этапе 2, с заранее определенным пределом L. Действительно, если эта производная является слишком малой, то последующие этапы вычисления невозможно осуществлять с необходимой точностью.
Если xʺ' меньше предела, последующие этапы не осуществляют.
На этапе 5 датчик определяет соотношение между dʺ' и xʺ' и выводит из него реальный скорректированный диаметр Dреал колеса. Для этого применяют следующее уравнение:
λ=dʺ'/xʺ'
Dреал=D/λ,
где D является теоретическим диаметром колеса, используемым для оценки dʺ'
Это измерение Dреал имеет определенную погрешность, связанную с шумами измерений. Этап 6 позволяет отфильтровать это значение на длительный срок, чтобы получить более точное значение (поскольку диаметр колеса не меняется в течение длительного срока). Эту фильтрацию осуществляют, например, посредством определения скользящей средней величины значения Dреал, полученного на этапе 5.
В варианте фильтрацию можно осуществлять при помощи фильтра Кальмана.
Далее со ссылками на фиг.4 следует описание второго варианта осуществления изобретения.
При этом подробно будут описаны только пункты, которыми второй вариант осуществления отличается от первого. Идентичные элементы или элементы, обеспечивающие одинаковые функции в обоих вариантах осуществления, будут обозначены одинаковыми позициями.
Во втором варианте осуществления инерциальный датчик 24 определяет не только ускорение транспортного средства в первом направлении (первое ускорение xʺ), но в этот же момент определяет также угловую скорость транспортного средства вокруг второго направления y (вторая угловая скорость θy').
Это значение учитывают на этапе 5 для определения диаметра колеса. Это позволяет повысить точность вычисления на участках пути, где происходит разрыв наклона, то есть изменение угла наклона, как показано на фиг.4.
На этой фигуре показан профиль пути, содержащий первый участок 26 спуска, второй плоский участок 28, разрыв 30 наклона между участками 26 и 28. Когда транспортное средство перемещается по участку 26, вес P транспортного средства имеет составляющую, которая стремится ускорить транспортное средство в направлении x. Определяя значение ускорения xʺ в первом направлении, инерциальный датчик 24 измеряет общее значение ускорения, которое учитывает участие силы тяжести. Пока наклон является постоянным, участие силы тяжести в ускорении тоже является постоянным, и на производную xʺ' не влияет тот факт, что транспортное средство находится на наклонном участке пути. Это же относится и к горизонтальному участку 28. Вместе с тем, на участке 30 происходит разрыв наклона, и участие силы тяжести в ускорении в первом направлении меняется. Это выражается тем, что участие силы тяжести в значении xʺ' становится не равным нулю.
Такой разрыв наклона может быть обнаружен акселерометром 24, так как в точке 30 меняется θy'. В этом случае для оценки второй величины вычислительное устройство может учитывать не только xʺ', но также θy'. В частности, оно корректирует значение xʺ' в зависимости от θy'. Например, оно добавляет к xʺ' влияние силы тяжести, которое равно θy' g cosθy, где g является ускорением силы тяжести.
В варианте вычислительное устройство не осуществляет этап 5, когда оно обнаруживает, что изменение θy' превышает заранее определенное значение.
Далее следует описание третьего варианта осуществления. При этом будут описаны только пункты, которыми третий вариант осуществления отличается от первого. Идентичные элементы или элементы, обеспечивающие одинаковые функции в обоих вариантах осуществления, будут обозначены одинаковыми позициями.
В этом третьем варианте осуществления инерциальный датчик 24 определяет не только ускорение транспортного средства в первом направлении xʺ, но и угловую скорость транспортного средства вокруг первого направления x, второго направления y и вокруг третьего направления z, и эти угловые скорости соответственно обозначены θx', θy', и θz'.
Затем эти значения учитывают для определения второй величины, характеризующей производную ускорения транспортного средства.
Это представляет особый интерес, когда способ применяют при движении транспортного средства по участку на вираже или с поперечным наклоном.
В варианте вычислительное устройство не осуществляет этап 5, когда оно обнаруживает, что изменения θx', или θz' превышают заранее определенное значение.
Далее со ссылками на фиг.5 следует описание четвертого варианта осуществления.
Подробно будут описаны только пункты, которыми четвертый вариант осуществления отличается от первого. Идентичные элементы или элементы, обеспечивающие одинаковые функции, будут обозначены одинаковыми позициями.
Как показано на фиг.5, датчик 24 установлен таким образом, что первое направление x не является строго параллельным направлению нормального перемещения транспортного средства F. Ориентация первого направления x смещена относительно F. Это смещение можно разложить на два угловых смещения β и γ:
- угловое смещение β параллельно плоскости Р качения,
- угловое смещение γ вверх или вниз относительно плоскости P качения, называемое также перекосом.
Следует отметить, что одно или другое из двух угловых смещений может быть не нулевым.
В этом случае ускорение xʺ', измеряемое в первом направлении инерциальным датчиком 24, не является строго равным ускорению транспортного средства в направлении F.
В четвертом варианте осуществления при помощи инерциального датчика 24 в дополнение к xʺ' периодически измеряют значения yʺ и zʺ. Эти значения используют для оценки угловых смещений β и γ.
Вычисление параметра λ меняется следующим образом:
λ=dʺ' cosβ cosγ/xʺ'
Все остальные вычисления являются идентичными.
Изобретение относится к способу оценки величины, характеризующей диаметр колеса (14) транспортного средства (10), когда это транспортное средство находится в движении. Способ включает в себя этапы, на которых определяют первую величину, характеризующую производную углового ускорения (αʺ') колеса (14), определяют вторую величину, характеризующую производную ускорения транспортного средства (10), и оценивают величину, характеризующую диаметр колеса (14), на основании первой и второй величин. Изобретение относится также к блоку оценки величины, характеризующей диаметр колеса (14) транспортного средства (10). Блок содержит устройство определения первой величины, характеризующей производную углового ускорения (αʺ') колеса (10), устройство определения второй величины, характеризующей производную ускорения транспортного средства (10), устройство оценки величины, характеризующей диаметр колеса (14), на основании первой и второй величин. В результате достигается возможность оценивать диаметр колеса постоянно с высокой точностью и без вмешательства оператора. 2 н. и 18 з.п. ф-лы, 5 ил.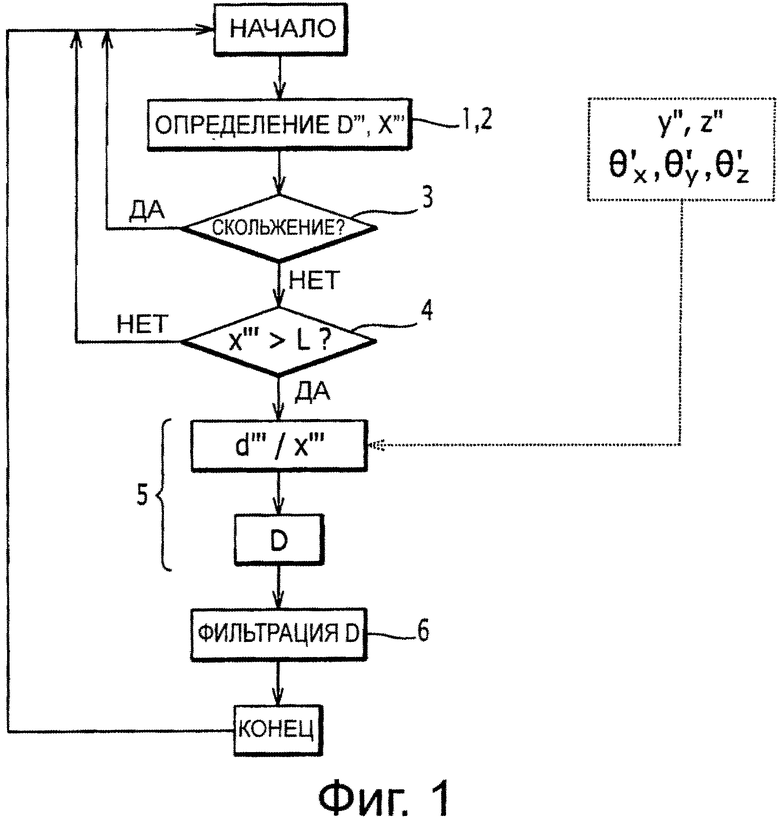
1. Способ оценки величины, характеризующей диаметр колеса (14) транспортного средства (10), когда оно находится в движении, включающий этапы, на которых определяют первую величину, характеризующую производную углового ускорения (αʺ') колеса (14), определяют вторую величину, характеризующую производную ускорения транспортного средства (10), оценивают величину, характеризующую диаметр колеса (14), на основании первой и второй величин.
2. Способ по п.1, отличающийся тем, что первую величину оценивают при помощи датчика (18), измеряя угловое перемещение колеса (14).
3. Способ по п.1 или 2, отличающийся тем, что вторую величину оценивают при помощи инерциального датчика (24).
4. Способ по п.3, отличающийся тем, что инерциальный датчик (24) определяет первое ускорение (xʺ) транспортного средства в первом направлении (x), параллельном направлению нормального перемещения (F) транспортного средства (10), при этом вторую величину оценивают на основании указанного первого ускорения (xʺ).
5. Способ по п.4, отличающийся тем, что инерциальный датчик (24) определяет вторую скорость вращения (θy') транспортного средства (10) вокруг второго направления (y), по существу, параллельного плоскости качения (P) транспортного средства (10) и перпендикулярного к первому направлению (x), при этом вторую величину оценивают на основании первого ускорения (xʺ) и на основании второй скорости вращения (θy').
6. Способ по п.5, отличающийся тем, что инерциальный датчик (24) определяет первую и третью скорости вращения (θx', θy') транспортного средства (10) соответственно вокруг первого направления (x) и вокруг третьего направления (z), по существу, перпендикулярного к плоскости качения (P) транспортного средства, при этом вторую величину оценивают на основании первого ускорения (xʺ) и на основании первой, второй и третьей скоростей вращения (θ'x, θ'y, θ'z).
7. Способ по любому из пп.4-6, отличающийся тем, что инерциальный датчик (24) определяет второе ускорение (yʺ) транспортного средства (10) во втором направлении (y), по существу, параллельном плоскости качения (P) транспортного средства (10) и перпендикулярном к первому направлению (x), и/или определяет третье ускорение (zʺ) в третьем направлении (z), по существу, перпендикулярном к плоскости качения (P) транспортного средства (10), при этом вторую величину оценивают на основании первого ускорения (xʺ) и на основании второго и/или третьего ускорений (yʺ, zʺ).
8. Способ по любому из пп.1, 2, 4-6, отличающийся тем, что содержит этап проверки отсутствия пробуксовки или заклинивания колеса (14).
9. Способ по п.3, отличающийся тем, что содержит этап проверки отсутствия пробуксовки или заклинивания колеса (14).
10. Способ по п.7, отличающийся тем, что содержит этап проверки отсутствия пробуксовки или заклинивания колеса (14).
11. Способ по любому из пп.1, 2, 4-6, 9, 10, отличающийся тем, что содержит этап (4) сравнения второй величины с заранее определенным пределом (L), чтобы не допустить оценки величины, характеризующей диаметр колеса (14) на основании первой и второй величин, когда вторая величина меньше заранее определенного предела (L).
12. Способ по п.3, отличающийся тем, что содержит этап (4) сравнения второй величины с заранее определенным пределом (L), чтобы не допустить оценки величины, характеризующей диаметр колеса (14) на основании первой и второй величин, когда вторая величина меньше заранее определенного предела (L).
13. Способ по п.7, отличающийся тем, что содержит этап (4) сравнения второй величины с заранее определенным пределом (L), чтобы не допустить оценки величины, характеризующей диаметр колеса (14) на основании первой и второй величин, когда вторая величина меньше заранее определенного предела (L).
14. Способ по п.8, отличающийся тем, что содержит этап (4) сравнения второй величины с заранее определенным пределом (L), чтобы не допустить оценки величины, характеризующей диаметр колеса (14) на основании первой и второй величин, когда вторая величина меньше заранее определенного предела (L).
15. Способ по любому из пп.1, 2, 4-6, 9, 10, 12-14, отличающийся тем, что содержит этап (6) фильтрации величины, характеризующей диаметр колеса (14).
16. Способ по п.3, отличающийся тем, что содержит этап (6) фильтрации величины, характеризующей диаметр колеса (14).
17. Способ по п.7, отличающийся тем, что содержит этап (6) фильтрации величины, характеризующей диаметр колеса (14).
18. Способ по п.8, отличающийся тем, что содержит этап (6) фильтрации величины, характеризующей диаметр колеса (14).
19. Способ по п.11, отличающийся тем, что содержит этап (6) фильтрации величины, характеризующей диаметр колеса (14).
20. Блок оценки величины, характеризующей диаметр колеса (14) транспортного средства (10), содержащий устройство определения первой величины, характеризующей производную углового ускорения (αʺ') колеса (10), устройство определения второй величины, характеризующей производную ускорения транспортного средства (10), устройство оценки величины, характеризующей диаметр колеса (14), на основании первой и второй величин.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| 1-Окси-4-адамантил-1,4-диазабицикло /4,3,0/нонан, обладающий гипертензивной активностью | 1984 |
|
SU1197419A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ИЗНОСА КОЛЕС РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2203819C2 |
| МАГНИТНОЕ ТОРМОЗНОЕ УСТРОЙСТВО | 2003 |
|
RU2293667C2 |
| Преобразователь угол-код | 1973 |
|
SU495693A1 |
| US 4075538 A, 21.02.1978. | |||

