Изобретение относится к области лазерной дальнометрии.
Дальномер позволяет измерять расстояние до цели. В оптическом дальномере для измерения используется распространение света в среде, при этом дальномер состоит из излучателя и приемника. Он излучает свет, направляемый к цели, и обнаруживает часть этого света, возвращаемую целью. Расстояние вычисляется по времени, необходимому для прохождения света к цели и для возвращения света к приемнику. Излучение модулируется во времени. Излучаемый свет переносит эту модуляцию к цели. Этот свет отражается или рассеивается обратно. Часть этого возвращающегося света переносит модуляцию к приемнику дальномера. Измерение времени, прошедшего между идентификацией исходной модуляции дальномера и идентификацией модуляции эхосигнала приемником, позволяет вычислять расстояние между дальномером и целью на основании скорости распространения света в средах, через которые он проходит.
Обычно дальномер включает в себя излучающее устройство, содержащее излучатель и оптику для формирования лазерного пучка, приемное устройство, содержащее оптику для сбора и фокусирования на фокальную плоскость лазерных эхосигналов, рассеиваемых обратно целью, и устройство обработки для управления излучением и приемом и обеспечения вычисления расстояния.
Оптический эхосигнал от цели преобразуется в электрический сигнал детектором, при этом электрический сигнал оказывается наложенным на шум. Фильтрованный и усиленный сигнал, получаемый в конце цепи детектирования, преобразуется в цифровую форму.
Кадр состоит из последовательности данных, полученных взятием выборок в течение времени, отсчитываемого от излучения импульса и в продолжение пробега туда и обратно, соответствующего максимальному расстоянию использования, или в течение времени, соответствующего дальности поиска в подобласти. Частоту выборок выбирают так, чтобы оптимизировать извлечение сигнала из шума и обеспечить требуемые разрешение и точность расстояния. Например, частота выборок 59,94 МГц будет обеспечивать шаг расстояния 2,5 м.
Различные решения были реализованы для увеличения дальности действия лазерного дальномера.
Первое решение заключается в повышении энергии, излучаемой за один импульс. Но на повышение накладываются ограничения, связанные с безопасностью окуляра и увеличением объема и энергопотребления излучающего устройства.
Другое решение заключается в повышении площади поверхности приемного зрачка. На это решение точно так же накладываются ограничения, связанные с объемом и массой дальномера.
В случае, когда размеры цели меньше, чем размеры пятна, создаваемого лазером в зоне цели, только часть света, попадающего на цель, содействует дальнометрии. Эта часть зависит от качества лазерного пучка, определяющего размер пятна, и от способа направления пучка на цель.
В идеальных условиях лазерный пучок очень слабо расходится и идеально направляется на цель, при этом весь излучаемый свет содействует дальнометрии. Однако линия визирования редко направлена на часть, которая в наибольшей степени содействует дальнометрии, при этом наиболее содействующей частью является зона, из которой отражением или обратным рассеянием к приемному устройству возвращается наибольшая часть излучения. Для исключения значительного ухудшения характеристик, когда линия визирования не направлена к наиболее содействующей части цели, необходимо повышать расходимость пучка, что отрицательно влияет на дальность действия дальномера.
В случае невзаимодействующих целей лазерное излучение обычно является импульсным. Цель является взаимодействующей, когда цель способствует возврату света в направлении излучателя, например, с помощью кубического клина.
В случае импульсной дальнометрии выходной сигнал детектора состоит из шума цепи детектирования, оптического шума, собираемого в приемном поле, и эхосигнала от ожидаемой цели. При достаточно большом сигнале детектирование момента прихода эхосигнала осуществляют сравнением с порогом. Иначе говоря, цель обнаруживается, если интенсивность эхосигнала больше, чем порог, заранее фиксированный выше уровня шума.
В момент сравнения с порогом сигнал является суммой усиленного сигнала, поступающего с детектора эхосигнала, и оптического и электронного шумов. В случае цели сигнал будет иметь амплитуду, изменяющуюся от одного импульса к последующему. В случае сигнала, находящегося вблизи порога, сигнал не всегда будет превышать порог. Когда сигнал ниже порога, детектирование отсутствует. Если ни в какой момент времени сигнал не превышает порога, эхосигнал отсутствует или слишком слабый.
Наблюдение можно осуществлять от начала импульса в течение времени, соответствующего максимальной дальности поиска, например, 533 мкс в случае максимальной дальности 80 км. Кроме того, наблюдение можно осуществлять в течение времени, соответствующего расстоянию до подобласти, например, в течение времени, соответствующего подобласти, находящейся между 40 и 50 км.
Другая возможность повышения вероятности детектирования цели в течение заданного интервала времени заключается в увеличении частоты повторения импульсов.
Для улучшения детектирования эхосигналов в шуме последовательные сигналы от нескольких импульсов можно объединять при детектировании. Объединение нескольких сигналов при детектировании можно выполнять в соответствии со способом постинтегрирования. Этот способ является старым, реализуемым в аналоговой форме, но все же популярным в эпоху цифровых технологий.
Обработка с постинтегрированием является способом объединения кадров сигналов, обнаруживаемых последовательно от каждого импульса.
В рассматриваемом дальномере этап постинтегрирования позволяет значительно повышать усиление, когда расстояние между дальномером и целью является достаточно стабильным в течение времени измерения.
В случае, когда дальномер надлежащим образом направлен на цель, вероятность наличия эхосигнала от цели в каждом кадре равна 1. Если в течение фазы постинтегрирования расстояние между дальномером и целью изменяется незначительно, на каждом шаге расстояния данные кадров добавляются. Ожидаемый сигнал S суммируется линейно, поэтому он пропорционален N, где N является числом кадров, 
Иначе говоря, на этапе постинтегрирования N кадров, имеющих вероятность наличия эхосигнала от цели в кадре, равную 1, отношение S/B интенсивности сигнала к интенсивности шума пропорционально 
Во время трудного сопровождения подвижной цели, особенно в случае, когда размеры цели меньше, чем размеры лазерного пятна в зоне цели, некоторые кадры не содержат никакой информации относительно наличия эхосигнала от цели. Постинтегрирование, применяемое ко всем кадрам, не дает ожидаемой эффективности. Кадры, которые содержат только шум, тем самым добавляются к кадрам, которые к тому же содержат эхосигнал от цели. Поэтому на вероятность нахождения эхосигнала в кадре непосредственно влияет усиление, ожидаемое после выполнения этапа постинтегрирования.
Когда вероятность наличия цели в лазерном пятне в зоне цели составляет 1/а, то есть, например, только один кадр из кадров содержит эхосигнал от цели, отношение S/B интенсивности сигнала к интенсивности шума пропорционально 

Задача изобретения заключается в улучшении характеристик дальномера за счет использования этапа постинтегрирования, использования изобретения, ранее описанного в заявке ЕР 2364455 на патент. В этой заявке ЕР 2364455 на патент предложено дальнометрическое приемное устройство, способное обнаруживать во времени и в пространстве эхосигнал, создаваемый целью, освещаемой лазерным импульсом.
Временное детектирование позволяет определять расстояние путем измерения времени прохождения импульса, его можно осуществлять посредством одного или нескольких детекторов.
Пространственное детектирование может быть достигнуто посредством одного или нескольких детекторов. Это детектирование на основании одного или нескольких импульсов позволяет маркировать направление, с которого приходит максимальное количество света, рассеиваемого обратно целью, или направление, в котором цель отсутствует. Это максимальное количество света возникает вследствие взаимодействия цели с пятном лазерного импульса. Поэтому можно повторно центрировать направление излучения, чтобы максимизировать эффективность дальномера.
Полоса пропускания, необходимая для временного детектирования, очень широкая по сравнению с полосой пропускания при пространственном детектировании, поэтому возрастает шум цепи временного детектирования. Следовательно, пространственное детектирование является намного более чувствительным, чем временное детектирование.
Согласно одному аспекту изобретения предложено устройство для измерения расстояния до цели посредством дальномера, содержащего:
- лазерный импульсный излучатель,
- приемник лазерных эхосигналов, рассеиваемых обратно целью, содержащий
устройство пространственного детектирования, которое содержит по меньшей мере один фотодиод, установленный в качестве интегратора и выполненный с возможностью обеспечения так называемого пространственного сигнала, и
устройство временного детектирования, которое содержит по меньшей мере один фотодиод, соединенный с трансимпедансной схемой и выполненный с возможностью обеспечения так называемого временного сигнала,
- средство обработки пространственного сигнала и временного сигнала, содержащее блок вычисления расстояния до цели, при этом временной сигнал имеет форму кадра данных, который является записью данных, детектированных в течение заданной продолжительности.
Оно в основном отличается тем, что средство обработки содержит:
- средство постинтегрирования временных сигналов, соединенное по выходу с блоком вычисления расстояния до цели,
- средство выбора временных сигналов, передаваемых к средству постинтегрирования, в зависимости от пространственного сигнала, соединенное с устройством пространственного детектирования и с устройством временного детектирования.
Иначе говоря, предложенный дальномер содержит лазерный импульсный излучатель, приемник, позволяющий получать пространственную информацию и кадры данных, и средство обработки пространственной информации и кадров данных для осуществления избирательного постинтегрирования этих кадров данных.
Дальномер согласно изобретению выполнен с возможностью выбора и адаптации обработки кадров на основании пространственной информации.
Способность дальномера обнаруживать цель в пространстве и маркировать кадры, возникающие в результате временного детектирования, априори содержащие элемент информации, относящейся к наличию эхосигнала от цели, позволяет ограничить недостатки, обусловленные лазерными импульсами, излучаемыми, но не достигающими цели.
В соответствии с первым вариантом осуществления средство выбора временных сигналов содержит блок управления переключением, соединенный по выходу через посредство переключателя с устройством временного детектирования, и соединенный по входу с устройством пространственного детектирования, и выполненный с возможностью переключать устройство временного детектирования через посредство переключателя в зависимости от пространственного сигнала, а средство постинтегрирования соединено по входу с устройством временного детектирования. В соответствии с этим вариантом осуществления все кадры с выхода временного детектора передаются к средству постинтегрирования, поскольку выбор производится в восходящем направлении относительно временного детектирования.
В соответствии с разновидностью этого варианта осуществления блок управления переключением дополнительно соединен со средством постинтегрирования.
В соответствии со вторым вариантом осуществления средство выбора временных сигналов представляет собой средство выделения, которое соединено по входу с устройством пространственного детектирования и с устройством временного детектирования, а по выходу - со средством постинтегрирования. В соответствии с этим вариантом осуществления только определенные кадры с выхода временного детектора передаются к средству постинтегрирования, поскольку выбор производится в нисходящем направлении относительно временного детектирования.
Предпочтительно, чтобы блок обработки содержал средство временной маркировки или создания метки даты кадров, вследствие чего будет обеспечиваться обработка постинтегрированием при детектировании подвижной цели.
Предпочтительно, чтобы приемник дополнительно содержал защитную створку для защиты приемника, когда нет необходимости в детектировании.
Предпочтительно, чтобы дальномер дополнительно содержал устройство выравнивания направления излучения и траектории приема.
Предпочтительно, чтобы дальномер также содержал средства детектирования наличия цели на расстояниях меньших, чем минимальная дальность дальнометрии. В зависимости от дальномера это минимальное расстояние может быть от 50 до 500 м. Эти средства детектирования позволяют деактивировать действие лазерного излучения и обеспечивать безопасность окуляра устройства от нулевого расстояния.
Предпочтительно, чтобы лазерный излучатель содержал средство адаптации расходимости и коллимирования лазерного пучка в бесконечности.
Предпочтительно, чтобы дальномер дополнительно содержал средство ориентации оси дальнометрии.
Предпочтительно, чтобы дальномер содержал средство измерения отклонения между осью дальнометрии и положением цели, и при этом средство измерения соединено с пространственным детектором.
Средство ориентации оси дальнометрии, связанное с измерением отклонения, позволяет осуществлять сопровождение подвижной цели.
Предпочтительно, чтобы дальномер обладал способностью сопровождения цели на основании информации о пространственном детектировании путем изменения пространственной компоновки пространственного и временного детекторов согласно изобретению, ранее описанному в заявке ЕР 2364455 на патент.
Согласно другому аспекту изобретения предложен способ измерения расстояния до цели дальномером, такой, как описанный ранее и содержащий:
- этап пространственного детектирования, содержащий подэтап излучения лазерного импульса излучающим устройством, подэтап детектирования пространственного сигнала SS и получения значения I интегрирования SS,
- этап временного детектирования, содержащий подэтап излучения лазерных импульсов излучающим устройством и подэтап получения временного сигнала ST в форме кадров данных,
- этап постинтегрирования кадров ST данных в зависимости от пространственного сигнала SS,
- когда результат постинтегрирования выше порога, этап вычисления расстояния.
Согласно первому режиму работы изобретения пространственное детектирование и временное детектирование являются последовательными и способ измерения расстояния до цели обеспечивается дальномером согласно первому варианту осуществления; он содержит следующие последовательные этапы:
- этап пространственного детектирования, содержащий подэтап излучения лазерного импульса излучающим устройством, подэтап детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS, и при этом, когда значение I ниже заданного порога S1, предшествующий этап повторяют,
- или же при детектировании цели реализуют этап временного детектирования, содержащий подэтап излучения других лазерных импульсов излучающим устройством и подэтап получения временного сигнала ST в форме кадров данных, соответствующих лазерным эхосигналам от этих других импульсов,
- этап постинтегрирования кадров ST данных, полученных в течение этапа временного детектирования.
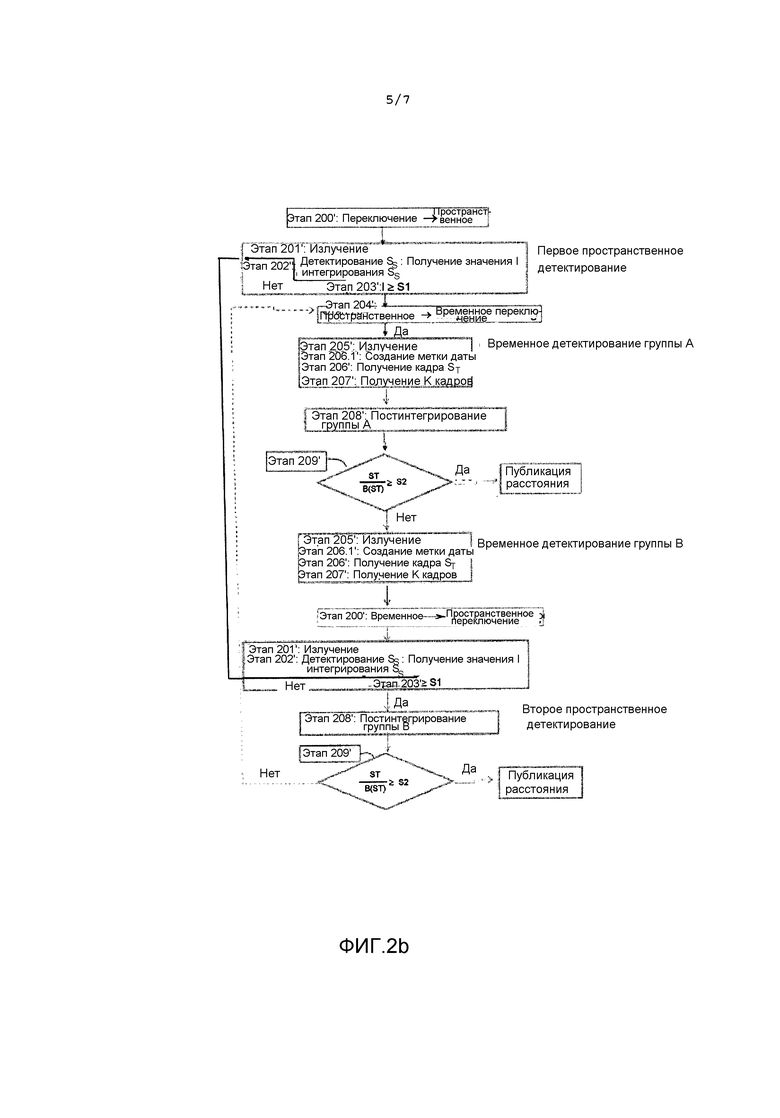
В соответствии с вариантом этого режима работы изобретения пространственное детектирование и временное детектирование являются последовательными, а способ измерения расстояния до цели обеспечивается дальномером согласно второму варианту осуществления и содержит следующие последовательные этапы:
- этап первого пространственного детектирования, содержащий подэтап излучения лазерного импульса излучающим устройством, подэтап детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS, и при этом, когда значение I ниже заданного порога S1, предшествующие подэтапы повторяют,
- или же при детектировании цели реализуют этап временного детектирования, содержащий подэтап излучения других лазерных импульсов излучающим устройством и подэтап получения временного сигнала ST в форме кадров данных, называемых группой А кадров, соответствующих лазерным эхосигналам от этих других импульсов,
- этап постинтегрирования этой группы А кадров ST данных, полученных в течение этапа временного детектирования,
- реализуют этап временного детектирования, содержащий подэтап излучения других лазерных импульсов излучающим устройством, которые отличаются от лазерных импульсов из группы А, подэтап получения временного сигнала ST в форме кадров данных, называемых группой В кадров, соответствующих лазерным эхосигналам от этих других импульсов, и подэтап помещения этой группы В кадров в запоминающее устройство,
- этап второго пространственного детектирования, содержащий подэтап излучения лазерного импульса излучающим устройством, подэтап детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS,
- при этом, когда значение I выше заданного порога S1 с самого первого импульса, пространственное детектирование является подтвержденным, активируют этап постинтегрирования группы В кадров данных, предшествующий этап временного детектирования группы А повторяют,
- и когда значение I ниже заданного порога S1, предшествующие этапы пространственного детектирования повторяют.
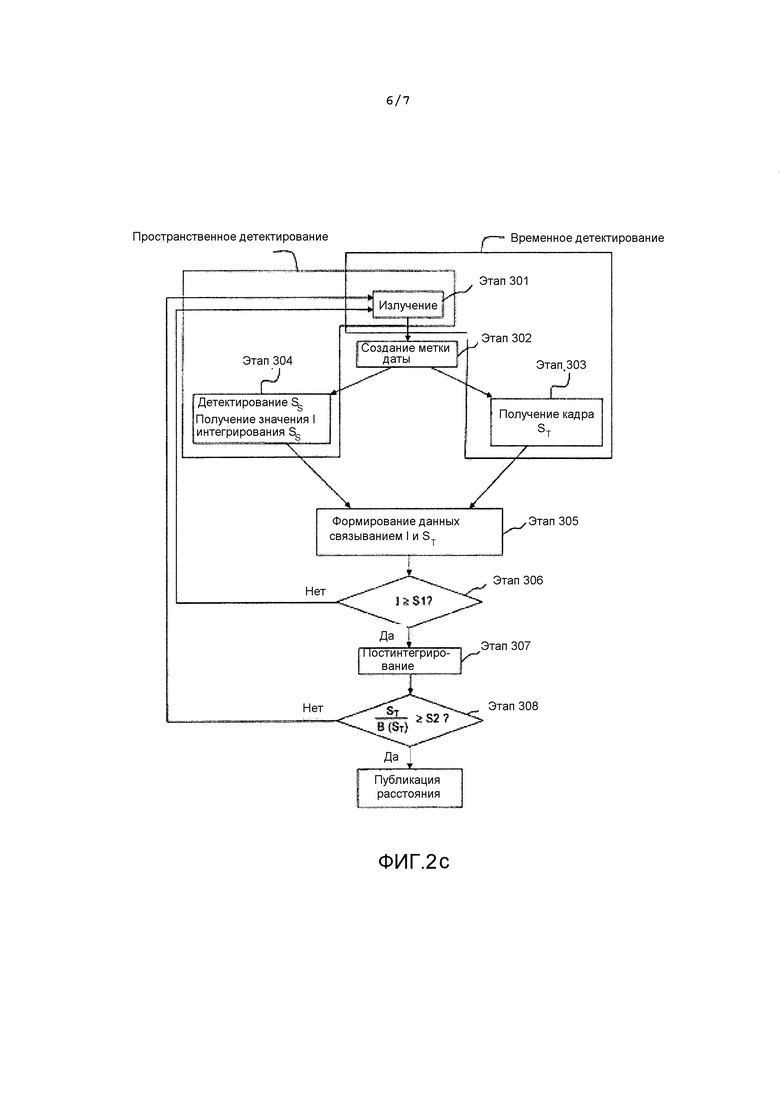
Согласно еще одному режиму работы изобретения пространственное детектирование и временное детектирование являются одновременными и способ измерения расстояния до цели обеспечивается дальномером согласно третьему варианту осуществления; он содержит следующие этапы:
- этап пространственного детектирования, содержащий подэтап излучения лазерного импульса излучающим устройством, подэтап детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS средством выбора и одновременный подэтап детектирования временного сигнала ST, соответствующего тому же самому лазерному эхосигналу от указанного импульса,
- когда значение I ниже заданного порога S1, предшествующий этап повторяют,
- или же при детектировании цели этап постинтегрирования соответствующих кадров ST данных средством постинтегрирования.
Эти этапы повторяют до получения измерения расстояния между целью и дальномером.
Способ согласно изобретению позволяет осуществлять взвешивание кадров данных в зависимости от уровня интенсивности пространственного сигнала.
Предпочтительно, чтобы способ дополнительно содержал этап временной маркировки (или создания метки даты) кадров перед их постинтегрированием.
В ряде ситуаций цель, расстояние до которой должно быть определено, является подвижной. В этом случае этапы можно повторять для различных предположений об относительной скорости между целью и дальномером.
Изобретение можно лучше понять при изучении нескольких вариантов осуществления, описанных в качестве не создающих ограничений примеров и иллюстрированных сопровождающими чертежами, на которых:
- фигуры 1 - приведенные для примера структурные схемы дальномера, отличающиеся построением средства выбора;
- фигуры 2 - схемы работы дальномера согласно изобретению, когда пространственное детектирование чередуется с временным детектированием (фигуры 2а и 2b), когда пространственное детектирование выполняется одновременного с временным детектированием (фиг. 2с), и
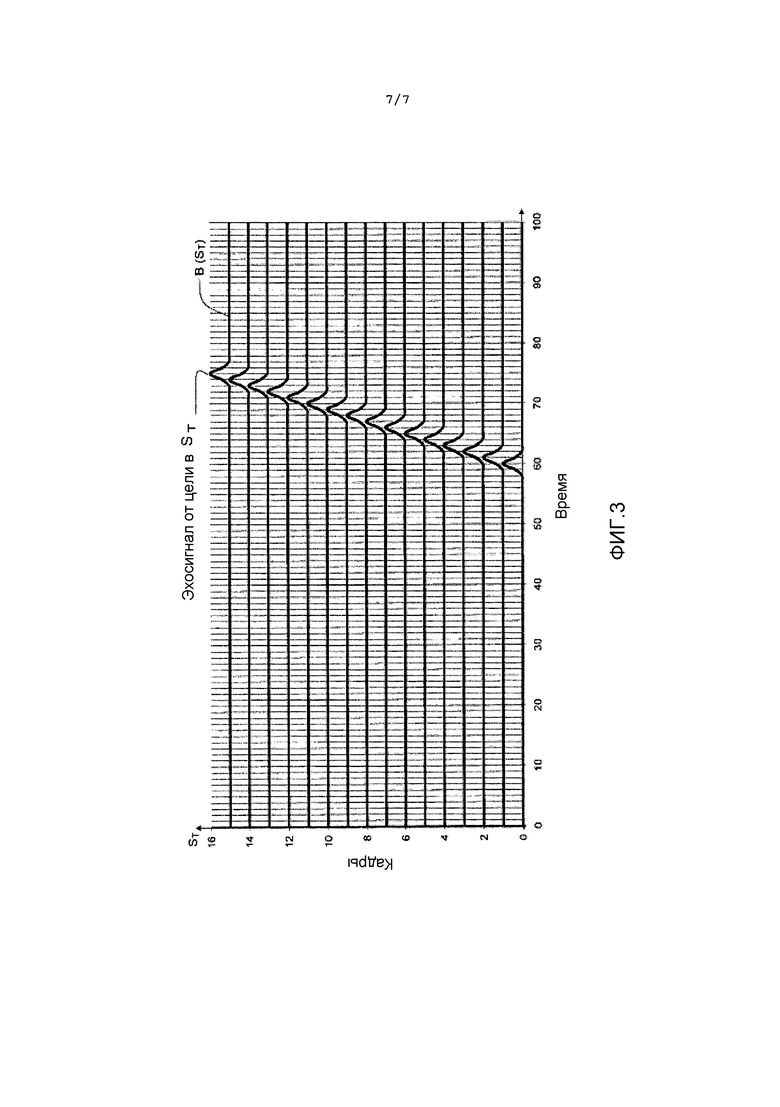
- фигура 3 - представление кадров ST, каждый из которых содержит элемент информации, показывающий наличие эхосигнала от цели в зависимости от времени, при этом относительная скорость цели является постоянной.
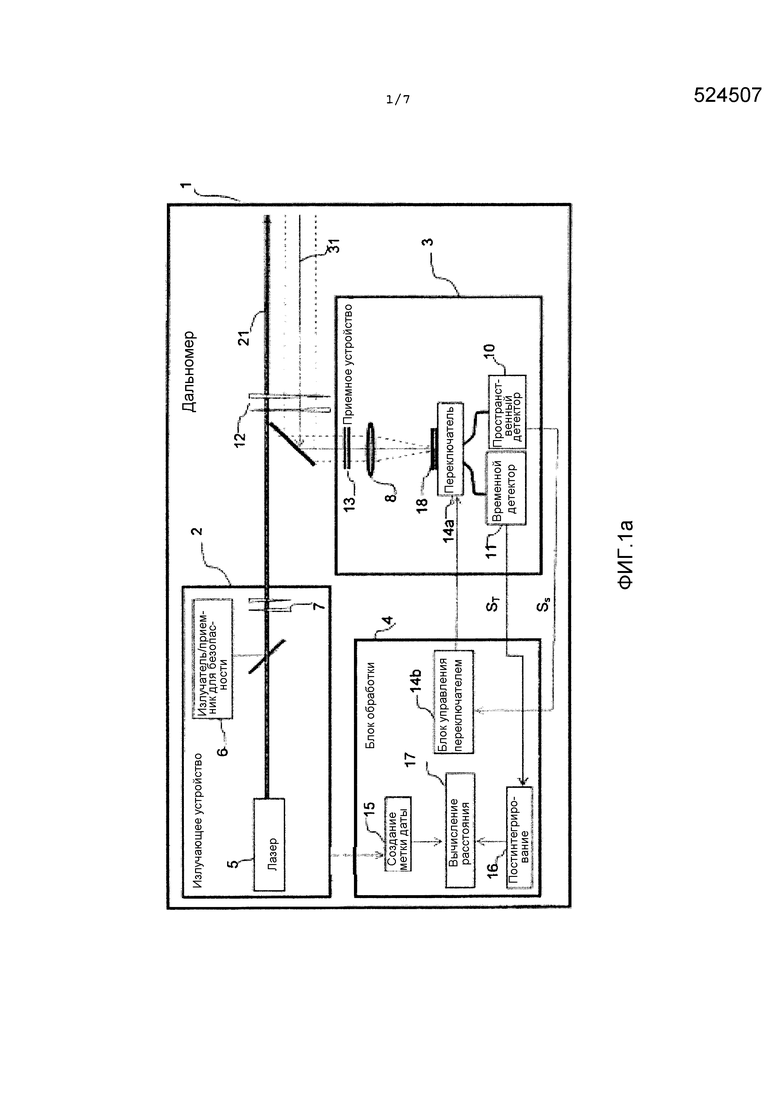
Дальномер 1, представленный на фигурах 1, содержит излучающее устройство 2 для излучения лазерного пучка 21, приемное устройство 3 для приема рассеиваемых обратно эхосигналов 31 и блок 4 обработки.
Устройство 2 для излучения лазерного пучка 21 содержит лазерный импульсный излучатель 5, обеспечивающий слабую расходимость. Предпочтительно, чтобы лазерный импульсный излучатель 5 был высокочастотным. Предпочтительно, чтобы для безопасности дальномер 1 включал в себя устройство, содержащее дополнительный излучатель/приемник 6, выполненное с возможностью детектирования наличия цели, находящейся на меньшем расстоянии, чем минимальное расстояние дальнометрии, и приспособленное для прекращения работы лазерного излучателя 5 в случае детектирования цели на меньшем расстоянии, чем минимальное расстояние дальнометрии, чтобы гарантировать безопасность окуляра дальномера 1. Обычно под минимальным расстоянием дальнометрии имеют в виду расстояние, находящееся между 0 и 500 м.
Предпочтительно, чтобы излучающее устройство 2 могло также содержать оптику, не представленную, способную формировать лазерный пучок. Иначе говоря, при выходе из излучателя 5 лазерный пучок 21 должен иметь заданную расходимость и коллимироваться в бесконечности.
Предпочтительно, чтобы дальномер 1 содержал средство ориентации излучения, позволяющее изменять направление излучения в зависимости от направления приема.
В соответствии с изобретением дальнометрию цели выполняют следующим образом. Излучающее устройство 2 излучает импульсный лазерный сигнал 21 и в случае необходимости передает время излучения импульса 21 к блоку 4 обработки.
Приемное устройство 3 для приема рассеиваемых обратно эхосигналов 31 содержит оптику 8, которая фокусирует рассеиваемые обратно эхосигналы 31 на фокальную плоскость 18. Как описано в заявке ЕР 2364455 на патент, эта фокальная плоскость может быть подразделена на несколько элементарных зон детектирования. В каждой элементарной зоне детектирование может быть пространственным или временным. Приемное устройство 3 может содержать средство направления рассеиваемых обратно эхосигналов 31 к пространственному детектору 10 или временному детектору 11, описанным в заявке ЕР 2364455 на патент. Пространственный 10 и временной 11 детекторы могут быть расположены в фокальной плоскости 18 или свет может передаваться из фокальной плоскости к детекторам 10, 11 оптическими средствами, такими как зеркала или оптические волокна. Пространственное и временное детектирования могут осуществляться одним детектором, связанным с двумя отдельными схемами считывания, одной, предназначенной для пространственного детектирования, и другой, предназначенной для временного детектирования, или двумя отдельными детекторами, одним для временного детектирования и другим для пространственного детектирования. Пространственный детектор 10 обычно представляет собой фотодиод, снабженный интегратором. Компоновка является малошумной. В течение периода интегрирования заряды создаются и сохраняются, а затем после периода интегрирования схема считывания преобразует эти заряды в сигнал, пропорциональный количеству собранных зарядов. Продолжительность интегрирования согласована с областью или подобластью расстояний, в которой цель может находиться. Возможно детектирование очень слабого сигнала, порядка нескольких десятков фотонов. Временной детектор11 обычно представляет собой фотодиод p-i-n-типа, лавинный фотодиод или фотодиод с большой полосой пропускания, оптимизированной для временной маркировки эхосигналов и обеспечения возможности измерения расстояния между целью и дальномером. Его характеристика принципиально ограничена собственными шумами детектора и шумами связанных с ним трансимпедансных и усилительных схем. Разрешение временной модуляции позволяет точно измерять расстояние. Лавинный фотодиод позволяет повысить отношение интенсивности сигнала к интенсивности шума. Несколько сотен или же тысяч фотонов требуется для получения отношения сигнала к шуму, достаточного для ограничения рисков ложной тревоги. Уровень сигнала, обнаруживаемого временным детектором 11, намного выше, чем уровень сигнала, обнаруживаемого пространственным детектором 10.
Предпочтительно, чтобы дальномер 1 содержал ориентирующее устройство 12 для ориентации оси дальнометрии, содержащей траекторию излучения и траекторию приема. Это устройство может быть динамическим для обеспечения точного сопровождения цели на основании информации об измерении отклонения при пространственном детектировании.
Предпочтительно, чтобы приемное устройство также содержало отводимую защитную заслонку 13 для защиты приемника, когда нет необходимости в детектировании.
Предпочтительно, чтобы приемное устройство 3 содержало средство формирования данных для последующей цифровой обработки. Для измерения расстояния с шагом 2,5 м частота выборок должна быть 59,958 МГц. Однако можно использовать более высокую частоту выборок для лучшей репрезентативности импульсов в течение операций обработки.
Блок 4 обработки содержит следующие средства:
- Средство 14 выбора, которое определяет значение I интегрирования пространственного сигнала SS, возникающего в результате пространственного детектирования, и выбирает кадры с выхода временного детектора, которые должны подвергаться постинтегрированию.
- Средство 16 постинтегрирования выбранных временных кадров.
- Средство 17 вычисления расстояния между целью и дальномером на основании результатов, получаемых средством постинтегрирования.
В соответствии с первым вариантом осуществления, показанным на фигуре 1а, это средство выбора активирует пространственное детектирование или временное детектирование в зависимости от значения I интегрирования SS. Примером этого средства выбора является переключающее средство, позволяющие направлять рассеиваемые обратно эхосигналы 31 к пространственному детектору 10 или временному детектору 11. Это переключающее средство содержит блок 14b управления переключением, способный принимать решение в зависимости от I, и переключатель 14а, способный выполнять это решение. Переключающее средство 14а, 14b направляет сигнал к пространственному детектору 10 во время пространственного детектирования. Когда пространственное детектирование завершается, переключающее средство 14a, 14b направляет сигнал к временному детектору 11 для получения группы кадров. В соответствии с этим вариантом осуществления все кадры из группы с выхода временного детектора 11 передаются к средству 16 постинтегрирования, поскольку выбор производится в восходящем направлении относительно временного детектора.
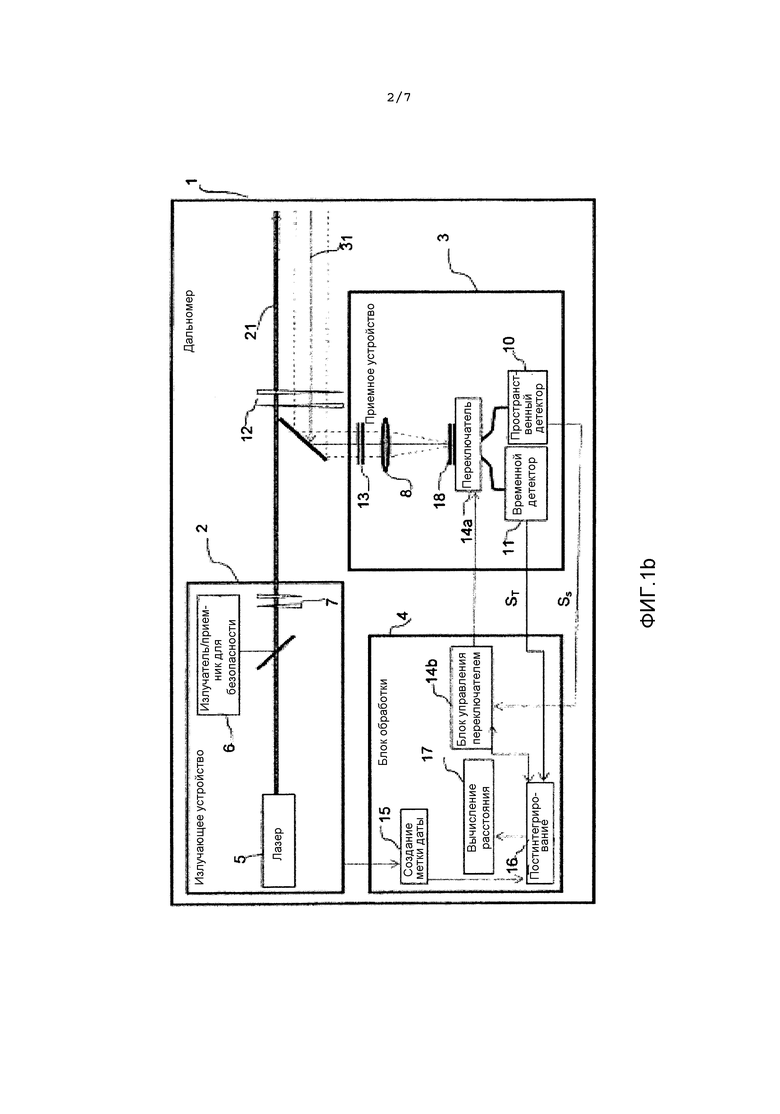
В соответствии со вторым вариантом осуществления, показанным на фигуре 1b, отличным от первого варианта осуществления, блок 14b управления переключением также соединен со средством 16 постинтегрирования.
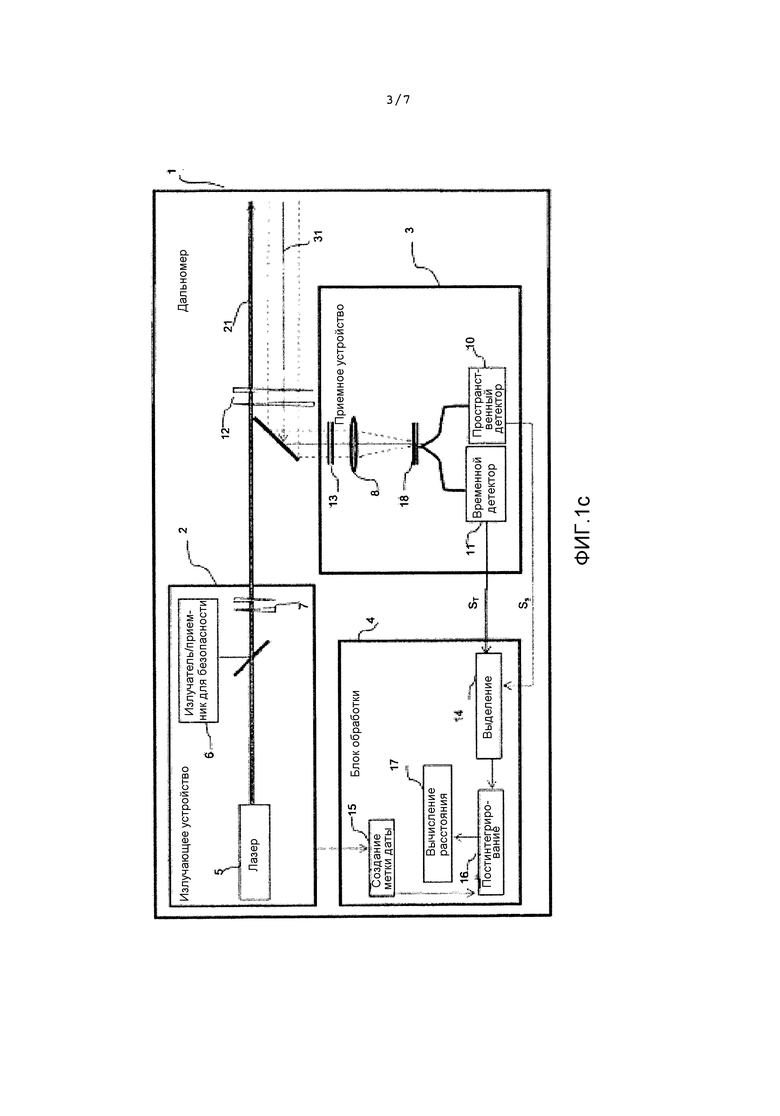
В соответствии с третьим вариантом осуществления, показанным на фигуре 1с, средство выбора представляет собой средство 14 выделения, входы которого соединены с устройством 10 пространственного детектирования и устройством 11 временного детектирования, а выход соединен со средством 16 постинтегрирования. Два детектора, пространственный и временной, являются активными для всех импульсов. В зависимости от значения I интегрирования SS производится выделение кадра с выхода устройства 11 временного детектирования, с тем, чтобы определить, следует ли передавать его к средству 16 постинтегрирования. Разделение кадров основано на различии статических свойств пространственного детектирования и временного детектирования. Речь идет, например, о полупрозрачной пластине. В соответствии с этим вариантом осуществления только определенные кадры из группы с выхода временного детектора 11 передаются к средству 16 постинтегрирования, поскольку выбор производится в нисходящем направлении относительно временного детектора 11.
Предпочтительно, чтобы блок 4 обработки содержал средство 15 временной маркировки (этапы 206.1, 302) кадров ST, которая соответствует меткам даты излучений, создаваемых излучающим устройством; они присутствуют на выходе излучающего устройства 2 и на входе средства 16 постинтегрирования. В случае необходимости их можно вводить в средство выбора. Как описывается ниже, эта временная маркировка необходима в случае подвижной цели, но не в случае неподвижной цели, а когда заранее неизвестно, какой является цель, неподвижной или подвижной, эту временную маркировку осуществляют по умолчанию.
Дальномер 1 согласно одному аспекту изобретения позволяет обнаруживать наиболее важную часть цели, чтобы точно ориентировать ось излучения относительно этой части и дальномера. Поэтому это позволяет ограничить время ожидания индикации расстояния до цели, когда лазерные импульсы попадают на боковую поверхность цели.
Несколько режимов работы дальномера 1 можно использовать, все они основаны на постинтегрировании лазерных эхосигналов, которые обнаруживаются временным детектором и предварительно выбираются в зависимости от выходного сигнала пространственного детектора: пространственное детектирование чередуется с временным детектированием, в случае необходимости с непостоянным чередованием, или пространственное детектирование происходит одновременно с временным детектированием.
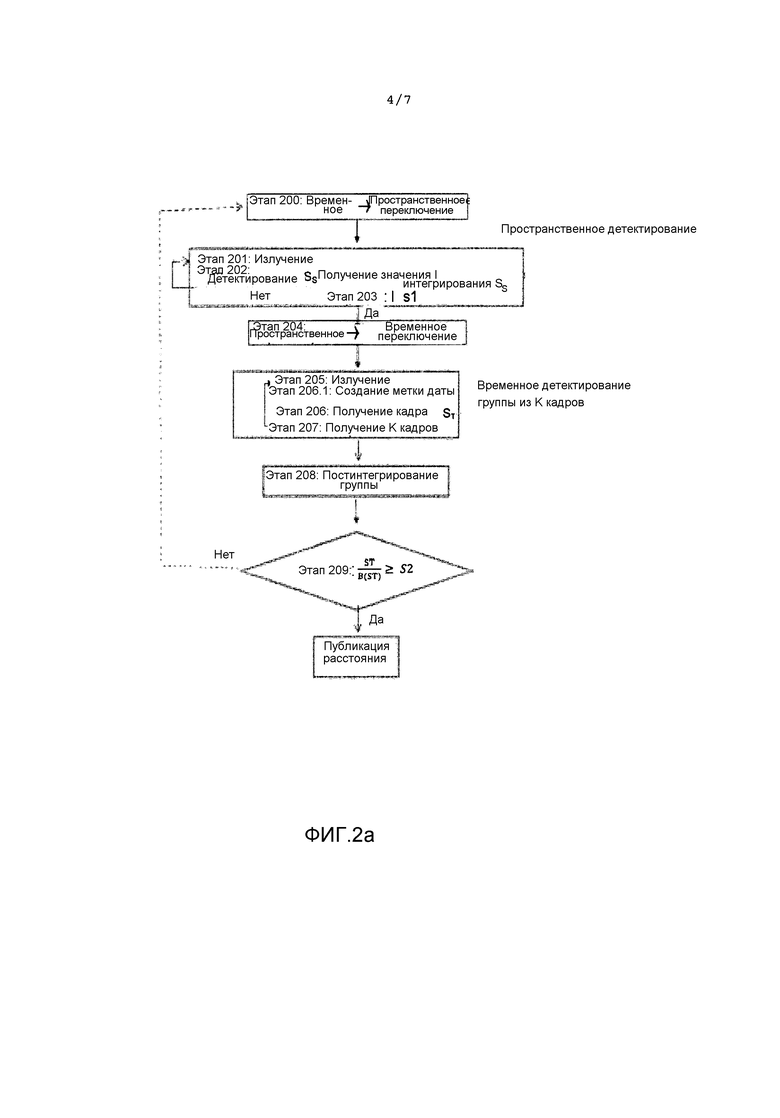
На фигуре 2а представлен режим работы дальномера согласно первому способу использования, когда пространственное детектирование чередуется с временным детектированием. Используемым дальномером является дальномер, описанный в сочетании с фигурой 1а.
На первом этапе 200 пространственное детектирование активируют до тех пор, пока не будет детектирована цель, для которой может быть желательным измерение расстояния между целью и дальномером, этот этап пространственного детектирования содержит подэтапы 201, 202 и 203. В случае необходимости активируют детектирование наличия цели, находящейся на меньшем расстоянии, чем минимальное расстояние дальнометрии, что позволяет гарантировать безопасность окуляра устройства.
На подэтапе 201 излучающим устройством 2 излучается лазерный импульс. На подэтапе 202 пространственное детектирование заключается в интегрировании в течение времени, соответствующего времени распространения излучения вперед-назад в области или подобласти использования дальномера, с тем, чтобы получить значение I интегрирования. Например, для цели, находящейся в подобласти на дальности поиска между 40 и 50 км, окно интегрирования должно находиться между 266 мкс и 333 мкс, при этом момент излучения импульса соответствует нулевому моменту времени, область соответствует интервалу между дальномером и максимальной дальностью излучения, интервалу от 0 до 80 км. На этапе 203 значение I интегрирования сравнивают с пороговым значением S1, предварительно фиксированным. Если значение I интегрирования меньше, чем пороговое значение S1, эхосигнал от цели не является удовлетворительным. В таком случае он является бесполезным для активации временного детектирования и подэтапы с 201 по 203 повторяют. В этом случае изменяют направление оси дальнометрии или временное окно или принимают решение об отсутствии обнаружимой цели. Выполнение этапов гарантируется пространственным детектором 10 и переключающим средством 14а, 14b.
Если значение I интегрирования больше, чем пороговое значение S1, это обязательно означает, что цель присутствует, при этом на последующих этапах временного детектирования следует использовать кадры, содержащие сигнал, исходящий от цели, в дополнение к шуму из области или подобласти на дальности поиска. Переключением на этапе 204 осуществляют переход к временному детектированию. Получают группу из K кадров, а этот этап содержит подэтапы с 205 по 207.
На подэтапе 205 дальномер излучает новый лазерный импульс излучающим устройством 2. На подэтапе 206 кадр ST данных регистрируют на протяжении обратного временного окна эхосигнала от цели, соответствующего дальности поиска в области или подобласти; и, как будет рассмотрено ниже для случая подвижной цели, в случае необходимости датируют в течение подэтапа 206.1. Считается, что в зависимости от характеристик системы и вида цели, которую желательно обнаружить, направление излучения лазера на цель должно быть стабильным в течение заданного числа K излучений. На подэтапе 207 осуществляют управление получением группы из K кадров путем повторения этапов с 205 по 206. Эти K кадров передают к средству 16 постинтегрирования для выполнения этапа 208 постинтегрирования. В соответствии с этим чередующимся (или последовательным) режимом работы все кадры с выхода временного детектора принимаются во внимание при постинтегрировании, поскольку выбор производится в восходящем направлении относительно временного детектирования.
На этапе 209, обеспечиваемом средством 16 постинтегрирования, проверяют, можно ли в результате выполнения этапа 208 постинтегрирования K кадров публиковать расстояние с приемлемой вероятностью ложной тревоги, иначе говоря, превышает ли результат постинтегрирования второе пороговое значение S2. Если невозможно получить расстояние с вычислительного средства 17, то есть, например, если постинтегрирование не является удовлетворительным для публикации расстояния (тест на этапе 209 является отрицательным), выполняют новый цикл: переключающее средство повторно активирует стадию пространственного детектирования наличия цели и затем собирают K новых кадров с тем, чтобы добавлять их перед последующим интегрированием.
Когда ось дальнометрии и цель перемещаются относительно друг друга, информацию, относящуюся к наличию цели на оси дальнометрии, получаемую при последовательном выполнении этапов 202 и 203, в случае необходимости можно использовать для сопровождения цели.
Для уменьшения мертвого времени переключения можно реализовать вариант этого режима работы. Цикл, описанный выше, можно усовершенствовать следующим способом, описываемым в сочетании с фигурой 2b. Используемым дальномером является дальномер, описанный в сочетании с фигурой 1b. Согласно этому варианту после получения группы А кадров и постинтегрирования их получают вторую группу В кадров. Затем средство выбора активирует пространственное детектирование. Если при выполнении пространственного детектирования с самого первого импульса обнаруживают наличие цели, группу В подвергают постинтегрированию. В противном случае группу В отбрасывают и продолжают пространственное детектирование. Если в соответствии с результатом постинтегрирования группы А расстояние не получают, выбор не изменяют. Если расстояние получают, изменяют выбор места пространственного детектирования.
Активируют (этапы 201', 202', 203') пространственное детектирование, называемое первым пространственным детектированием. Когда наличие цели подтверждается пространственным детектированием (тест на этапе 204' является положительным), получают (этапы 205', 206.1', 206', 207') группу А из K кадров временного детектирования. Выполняют (этап 208') постинтегрирование этой группы А. Расстояние можно публиковать (поскольку тест на этапе 209' является положительным) и затем пространственное детектирование активировать для следующего измерения расстояния (и этом случае начиная с первого пространственного детектирования). Если тест 209' для этой группы А является отрицательным, получают (этапы 205', 206.1', 206', 207') вторую группу В из K кадров. Эту вторую группу В сохраняют в запоминающем устройстве. Переключающее средство осуществляет переключение (этап 200) к пространственному детектору. Активируется пространственное детектирование, называемое вторым пространственным детектированием.
- Если при этом втором пространственном детектировании подтверждается наличие цели (положительный тест на этапе 203'), то эту вторую группу В из K кадров временного детектирования подвергают (этап 208') постинтегрированию одновременно с группой А. Если тест 209' является положительным после этого постинтегрирования группы В, процесс заканчивают публикацией расстояния. В противном случае переключающее средство осуществляет переключение к временному детектору и процесс возобновляется с получения группы А из K кадров (группы А временного детектирования).
- Если при втором пространственном детектировании не подтверждается наличие цели, вторую группу В из K кадров временного детектирования отбрасывают. И процесс продолжают для нового первого пространственного детектирования цели.
На фигуре 2с представлен режим работы дальномера в случае, когда согласно другому варианту осуществления пространственное детектирование происходит одновременно с временным детектированием. Используемый дальномер является дальномером, описанным в сочетании с фигурой 1с.
В случае необходимости активируют детектирование наличия цели на меньшем расстоянии, чем минимальное расстояние дальнометрии, вследствие чего может быть гарантирована безопасность окуляра устройства.
Измерение расстояния выполняют в соответствии с процессом, состоящим из циклов и показанным на фигуре 2с. Согласно одному аспекту изобретения на этапе 301 дальномер излучает лазерный импульс излучающим устройством 2. Временное детектирование активируют одновременно с пространственным детектированием. Если цель не обнаруживается при пространственном детектировании, дальномер излучает новый импульс.
Как будет видно в дальнейшем, в случае необходимости каждый импульс датируют на этапе 302.
На этапе 303 временного детектирования кадр ST данных регистрируют на протяжении обратного временного окна эхосигнала от цели на дальности поиска в области и подобласти посредством временного детектора 11. Этот кадр ST данных потенциально пригоден для вычисления расстояния между целью и дальномером.
На этапе 304, одновременном с этапом 303 и выполняемом пространственным детектором 10, пространственное детектирование заключается в интегрировании на протяжении того же самого обратного временного окна эхосигнала от цели на дальности поиска в области или подобласти с тем, чтобы получить значение I интегрирования, являющееся результатом того же самого лазерного эхосигнала.
На этапе 305, осуществляемом с помощью средства 14 выделения, связывают пространственную информацию SS, являющуюся результатом пространственного детектирования, и кадр ST данных, являющийся результатом временного детектирования, для последующей обработки данных, поскольку они являются результатом действия одного и того же лазерного эхосигнала. Например, их связывают в виде блока данных, содержащих I, ST и данные об излучении импульса.
Этап 306 анализа пространственной информации также обеспечивается средством 14 выделения, которое делает заключение, что эхосигнал от цели не является удовлетворительным, и в этом случае блок данных, полученный в течение этой итерации, отбрасывается и процесс возвращается к этапу 301, или эхосигнал от цели является удовлетворительным и в этом случае происходит переход к этапу 307: если I>S1, то ST и данные передаются к средству 16 постинтегрирования.
На этапе 307 осуществляют постинтегрирование временного кадра ST вместе с данными, накопленными во время предшествующих циклов. В соответствии с этим режимом одновременной работы некоторые кадры с выхода временного детектора учитывают при постинтегрировании, но обычно не все, поскольку выбор производится в нисходящем направлении относительно временного детектирования.
На этапе 308, осуществляемом с помощью средства 16 постинтегрирования, проверяют, что сигнал, полученный по завершении этапа постинтегрирования кадров, делает возможной публикацию расстояния: уровень извлеченного сигнала сравнивают с порогом S2, выше которого вероятность ложной тревоги является приемлемой. Если расстояние с вычислительного средства 17 не может быть опубликовано, процесс повторяют от этапа 301, чтобы накапливать новый кадр до тех пор, пока расстояние не станет публикуемым. Когда уровень извлеченного сигнала больше, чем порог S2, выше которого вероятность ложной тревоги является приемлемой, процесс заканчивают публикаций расстояния.
Вернемся к примеру, предложенному в вводной части: согласно одному аспекту изобретения для получения усиления 10 постинтегрирование должно касаться только 100 достоверных кадров, то есть 200 полученных кадров, а не 400 кадров, когда дальномер не используется.
Ниже рассмотрен случай подвижной цели.
На фигуре 3 представлена запись 16 кадров, содержащих эхосигнал от цели, при этом относительная скорость между целью и дальномером является известной и постоянной. Коррекция с учетом метки даты излучения импульса, соответствующей каждому кадру, и относительной скорости позволяет приблизиться к номинальному процессу для выполнения этапа постинтегрирования. Расстояние, получаемое между целью и дальномером, будет истинным только в данный момент времени. Поэтому получаемое расстояние следует датировать. В любой другой момент времени коррекцию расстояния следует выполнять путем учета относительной скорости.
Если скорость известна в недостаточной степени, следует проверить несколько предположений о скорости. Число n предположений о скорости соответствует относительной скорости v между целью и дальномером, умноженной на время Δt между первым и последним кадрами и деленной на разрешающую способность R по дальности, n=v⋅Δt/R.
Например, при условии, что время между первым и последним кадрами составляет 1 с, относительная скорость может изменяться от -20 м/с до +20 м/с и разрешающая способность по дистанции составляет 2,5 м, следует проверять минимум 16 предположений о скорости.
Однако, чтобы этап постинтегрирования был эффективным, сигнал цели следует суммировать по всем кадрам.
Следовательно, для каждого предположения о скорости вычисление расстояния между дальномером и целью выполняют с учетом временной метки излучения каждого кадра и выбранного предположения о скорости.
Предположение о скорости, которое вычисляют, вследствие выполнения этапа постинтегрирования дает наиболее сильный сигнал, являющийся наиболее вероятным. Расстояние представляют вместе с датой и вероятной скоростью.
Возьмем в качестве примера 100-герцовый дальномер и цель, когда применительно к пределу детектирования при одном импульсе в идеальном случае необходимо усиление 10. В случае, когда цель надлежащим образом центрирована в течение продолжительности дальнометрии, вероятность наличия эхосигнала в каждом кадре будет равна 1. Постинтегрирование следует выполнять по 100 кадрам. Как показывалось ранее, если время между первым и последним кадрами составляет 1 с, то максимальная относительная скорость равна +20 м/с и разрешающая способность равна 2,5 м, а число предположений о скорости составляет 16.
Как показывалось ранее, если вероятность наличия эхосигнала от цели в кадре составляет 1/2, то необходимо иметь 400 кадров для получения отношения сигнала к шуму, идентичного отношению сигнала к шуму, получаемому при вероятности наличия, составляющей 1. Поэтому число кадров умножают на множитель 4.
Число предположений о скорости также умножают на 4 или на 64 вследствие увеличения времени между первым и последним кадрами с 1 до 4 с.
Следовательно, число операций, выполняемых во время этапа постинтегрирования, в конечном счете умножается на коэффициент 4×4=16.
Согласно одному аспекту изобретения в случае использования дальномера предполагаются следующие вычисления. Число регистрируемых кадров умножают на 2 вследствие вероятности наличия цели в кадре, составляющей 1/2, число обрабатываемых кадров при постинтегрировании оставляют тем же самым: 100 кадров, поскольку все эти кадры содержат эхосигнал от цели, и число предположений о скорости умножают на 2, поскольку время между первым излучением и последним излучением умножают на 2. Число операций, выполняемых в течение этапа постинтегрирования, умножают на коэффициент 2, исключительно вследствие удвоения числа предположений о скорости.
Таким образом, с помощью этого изобретения, в случае подвижной цели, когда вероятность наличия эхосигнала от цели в кадре составляет 1/а, время детектирования и число операций в течение этапа постинтегрирования умножается на «а» с учетом предположений, касающихся относительной скорости. Тогда как без этого изобретения, в случае подвижной цели, когда вероятность наличия эхосигнала от цели в кадре составляет 1/а, время детектирования умножается на а2, и с учетом предположений, касающихся относительной скорости, число операций в течение этапа постинтегрирования умножается на а4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ С ИСПОЛЬЗОВАНИЕМ ВЗРЫВНОГО СИГНАЛА | 2013 |
|
RU2546852C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ | 2015 |
|
RU2612201C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НИЖНЕЙ ТОЧКИ АЙСБЕРГА | 2015 |
|
RU2603831C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| Способ определения взаимного расположения объектов | 2024 |
|
RU2839569C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| УЛЬТРАЗВУКОВОЕ ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2221494C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2014 |
|
RU2577079C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
Изобретение относится к лазерной дальнометрии. Техническим результатом является увеличение дальности действия лазерного дальномера. Заявленное устройство для измерения расстояния до цели посредством дальномера (1) содержит: лазерный импульсный излучатель (2), приемник (3) лазерных эхосигналов (31), рассеиваемых обратно целью, содержащий устройство (10) пространственного детектирования, которое содержит по меньшей мере один фотодиод, установленный в качестве интегратора и выполненный с возможностью обеспечения так называемого пространственного сигнала, и устройство (11) временного детектирования, которое содержит по меньшей мере один фотодиод, соединенный с трансимпедансной схемой и выполненный с возможностью обеспечения так называемого временного сигнала, средство (4) обработки пространственного сигнала и временного сигнала, содержащее блок (17) вычисления расстояния до цели, при этом временной сигнал имеет форму кадра данных, который является записью данных, детектированных на протяжении заданного времени, отличающееся тем, что средство (4) обработки содержит: средство (16) постинтегрирования временных сигналов, соединенное по выходу с блоком вычисления расстояния до цели, средство (14) выбора временных сигналов, передаваемых к средству постинтегрирования, в зависимости от пространственного сигнала, соединенное с устройством (10) пространственного детектирования и с устройством (11) временного детектирования. 2 н. и 15 з.п. ф-лы, 7 ил.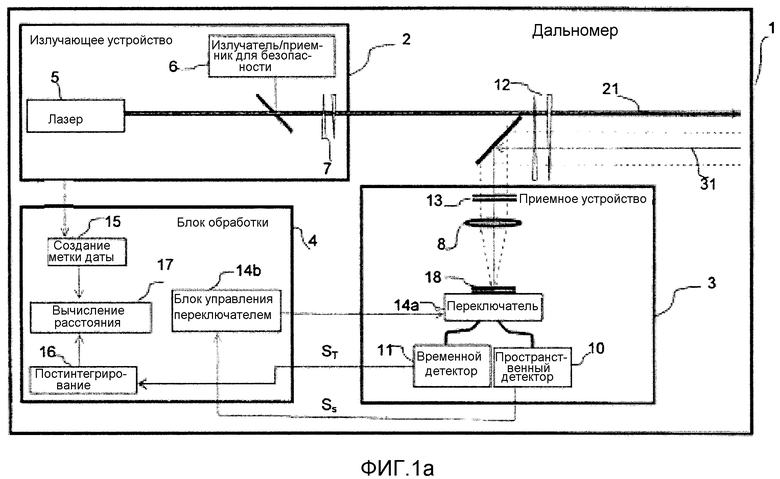
1. Устройство для измерения расстояния до цели посредством дальномера (1), содержащего:
- лазерный импульсный излучатель (2),
- приемник (3) лазерных эхосигналов (31), рассеиваемых обратно целью, содержащий
устройство (10) пространственного детектирования, которое содержит по меньшей мере один фотодиод, установленный в качестве интегратора и выполненный с возможностью обеспечения так называемого пространственного сигнала, и
устройство (11) временного детектирования, которое содержит по меньшей мере один фотодиод, соединенный с трансимпедансной схемой и выполненный с возможностью обеспечения так называемого временного сигнала,
- средство (4) обработки пространственного сигнала и временного сигнала, содержащее блок (17) вычисления расстояния до цели, при этом временной сигнал имеет форму кадра данных, который является записью данных, детектированных в течение заданной продолжительности,
отличающееся тем, что средство (4) обработки содержит:
- средство (16) постинтегрирования временных сигналов, соединенное по выходу с блоком вычисления расстояния до цели,
- средство (14) выбора временных сигналов, передаваемых к средству постинтегрирования, в зависимости от пространственного сигнала, соединенное с устройством (10) пространственного детектирования и с устройством (11) временного детектирования.
2. Устройство по п. 1, в котором средство выбора временных сигналов содержит блок (14b) управления переключением, соединенный по выходу через посредство переключателя (14а) с устройством (11) временного детектирования и соединенный по входу с устройством (10) пространственного детектирования и выполненный с возможностью переключать устройство (11) временного детектирования через посредство переключателя (14а) в зависимости от пространственного сигнала, а средство (16) постинтегрирования соединено по входу с устройством (11) временного детектирования.
3. Устройство по п. 2, в котором блок (14b) управления переключением дополнительно соединен со средством (16) постинтегрирования.
4. Устройство по п. 1, в котором средство выбора временных сигналов представляет собой средство (14) выделения, соединенное по входу с устройством (10) пространственного детектирования и с устройством (11) временного детектирования, а по выходу со средством (16) постинтегрирования.
5. Устройство по п. 1, в котором средство (4) обработки содержит средство (15) временной маркировки кадров.
6. Устройство по п. 1, в котором излучатель (2) имеет направление излучения и приемник (3) имеет направление приема и дополнительно содержит устройство (12) выравнивания направления излучения и направления приема.
7. Устройство по п. 1, в котором лазерный импульсный излучатель (2) содержит средство адаптации расходимости и коллимирования лазерного пучка в бесконечности.
8. Устройство по п. 1, дополнительно содержащее средства детектирования наличия цели на расстояниях меньших, чем минимальное расстояние дальнометрии, при этом средства детектирования выполнены с возможностью деактивации действия лазерного излучения и обеспечения безопасности окуляра устройства от нулевого расстояния.
9. Устройство по п. 1, дополнительно содержащее средство ориентации оси дальнометрии.
10. Устройство по п. 1, дополнительно содержащее средство измерения отклонения между осью дальнометрии и положением цели, при этом средство измерения соединено с пространственным детектором.
11. Способ измерения расстояния до цели посредством дальномера (1) по п. 1, отличающийся тем, что он содержит:
- этап пространственного детектирования, содержащий подэтап (202, 301) излучения лазерного импульса излучающим устройством (2), подэтап (203, 304) детектирования пространственного сигнала SS и получения значения I интегрирования SS,
- этап временного детектирования, содержащий подэтап излучения лазерных импульсов излучающим устройством (2) и подэтап получения временного сигнала ST в форме кадров данных,
- этап (208, 307) постинтегрирования кадров ST данных в зависимости от пространственного сигнала SS,
- когда результат постинтегрирования выше порога (на этапе 209, 308), этап вычисления расстояния.
12. Способ измерения расстояния до цели по предшествующему пункту посредством дальномера (1) по п. 2, отличающийся тем, что он содержит следующие последовательные этапы:
- этап пространственного детектирования, содержащий подэтап (201) излучения лазерного импульса излучающим устройством (2), подэтап (202) детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS, и при этом, когда значение I ниже заданного порога S1 (на этапе 203), предшествующий этап повторяют,
- или же при детектировании цели реализуют этап временного детектирования, содержащий подэтап (205) излучения других лазерных импульсов излучающим устройством (2) и подэтап (206, 207) получения временного сигнала ST в форме кадров данных, соответствующих лазерным эхосигналам от этих других импульсов,
- этап (208) постинтегрирования кадров ST данных, полученных в течение этапа временного детектирования.
13. Способ измерения расстояния до цели по п. 12 посредством дальномера (1) по п. 3, отличающийся тем, что он содержит следующие последовательные этапы:
- этап первого пространственного детектирования, содержащий подэтап (201') излучения лазерного импульса излучающим устройством (2), подэтап (202') детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS, и при этом, когда значение I ниже заданного порога S1 (на этапе 203'), предшествующие подэтапы повторяют,
- или же при детектировании цели реализуют этап временного детектирования, содержащий подэтап (205') излучения других лазерных импульсов излучающим устройством (2) и подэтап (206', 207') получения временного сигнала ST в форме кадров данных, называемых группой А кадров, соответствующих лазерным эхосигналам от этих других импульсов,
- этап (208') постинтегрирования этой группы А кадров ST данных, полученных в течение этапа временного детектирования,
- реализуют этап временного детектирования, содержащий подэтап (205') излучения других лазерных импульсов излучающим устройством (2), которые отличаются от лазерных импульсов из группы А, подэтап (206', 207') получения временного сигнала ST в форме кадров данных, называемых группой В кадров, соответствующих лазерным эхосигналам от этих других импульсов, и подэтап помещения этой группы В кадров в запоминающее устройство,
- этап второго пространственного детектирования, содержащий подэтап (201') излучения лазерного импульса излучающим устройством (2), подэтап (202') детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS, при этом, когда значение I выше заданного порога S1 (на этапе 203'), пространственное детектирование является подтвержденным, этап (208') постинтегрирования группы В кадров данных,
- и затем этап получения новой группы А кадров,
- и, когда значение I ниже заданного порога S1 (на этапе 203'), цикл возобновляют на уровне первого пространственного детектирования.
14. Способ измерения расстояния до цели по п. 11 посредством дальномера (1) по п. 4, отличающийся тем, что он содержит следующие последовательные этапы:
- этап пространственного детектирования, содержащий подэтап (301) излучения лазерного импульса излучающим устройством (2), подэтап (304) детектирования пространственного сигнала SS, соответствующего лазерному эхосигналу от указанного импульса, и получения значения I интегрирования SS средством выбора и одновременный подэтап (303) детектирования временного сигнала ST, соответствующего тому же самому лазерному эхосигналу от указанного импульса,
- когда значение I ниже заданного порога S1 (на этапе 306), предшествующий этап повторяют,
- или же при детектировании цели этап (307) постинтегрирования соответствующих кадров ST данных средством (16) постинтегрирования.
15. Способ по одному из пп. 11-13, дополнительно содержащий этап (206.1, 302) временной маркировки кадров до их постинтегрирования.
16. Способ по одному из пп. 11-14, в котором цель, расстояние до которой измеряют, является подвижной.
17. Способ по п. 16, в котором этапы повторяют при различных предположениях об относительной скорости между целью и дальномером.
| WO2010063805 A1, 10.06.2010 | |||
| US2011235020 A1, 29.09.2011 | |||
| EP1619469 A1, 25.01.2006 | |||
| US5612779 A, 18.03.1997 | |||
| US6323941 B1, 27.11.2001 | |||
| US4830485 A, 16.05.1989 | |||
| УСТРОЙСТВО ДЛЯ СЪЕМКИ ПРОСТРАНСТВА ПРЕДМЕТОВ | 2004 |
|
RU2335784C2 |

