Изобретение относится к способам навигации, в частности к способам определения взаимного расположения двух объектов без использования спутниковой навигации, и может быть использовано как часть автоматической системы управления движением автономными транспортными средствами в местах, где использование спутниковой навигации невозможно.
Известен способ ориентирования в пространстве движущегося транспорта по световому лучу, по которому в заданную зону пространства в определенном направлении посылают световой луч, а на движущемся транспорте принимают излучение, идущее от боковых сторон этого луча [пат. RU 2322371 способ ориентирования в пространстве движущегося транспорта по световому лучу и устройство для его реализации, опубл. 20.04.2008 Бюл. № 11].
Недостатком данного способа является то, что для корректной работы устройства, описанного в патенте необходима, постоянная ориентация источника коллимированного излучения видимого диапазона спектра (лазера) в сектор обзора приемной системы. Другим недостатком данного способа является отсутствие системы автоматического определения и подстройки направления приемного и излучающего модулей стационарного и подвижного объектов друг на друга.
Известно устройство определения пространственной ориентации объектов, содержащее лазер, оптическую систему, создающую стабильное базовое направление путем образования кольцевой структуры лазерного луча, и измерительный блок с позиционно-чувствительным фотоприемником, подключенным к вычислительному блоку [пат. RU 2534811 устройство определения пространственной ориентации объектов, опубл. 10.12.2014 Бюл. № 34].
Данное устройство не позволяет в автоматическом режиме определить направление и расстояние до подвижного объекта относительно стационарного и требуется постоянного участия человека в процессе.
Наиболее близким к заявляемому изобретению является способ измерения расстояния до объектов, их угловых координат и взаимного расположения, заключающийся в излучении импульсов излучения лазера в направлении поля обзора, детектировании отраженных импульсов, оцифровывании принятых сигналов, расчете дальностей до точек объектов в зоне обзора при одновременном измерении углового направления на эти точки и передаче результатов измерений и вычислений к внешним устройствам контроля [пат. RU 2575318 способ измерения расстояния до объектов, их угловых координат и взаимного расположения и устройство для его осуществления, опубл. 20.02.2016 Бюл. № 5].
Недостатком данного изобретения является то, что устройство, описанное в патенте, не способно эффективно измерять расстояние и направление при значениях углового поля, обозначенного как Wα в диапазоне от 0 до 1800, а именно в диапазонах углов близких к граничным и в граничных значениях углового поля.
Технический результат изобретения - автоматизированное определение расположения второго объекта, который неподвижен на момент определения его расположения, относительно первого объекта, являющимся стационарным.
Указанный результат достигается за счет того, что способ определения взаимного расположения объектов основан на построении виртуальной карты в виде двумерной системы координат и определении расположения объектов на ней посредством сочетания методов ультразвукового позиционирования и лазерной дальнометрии, в котором расположение статичного первого объекта, на котором установлен комплект оборудования для ультразвукового позиционирования и лазерной дальнометрии, принимается за исходную точку в двумерной системе координат, а координаты второго объекта, неподвижного на момент определения его расположения, рассчитываются исходя из его расстояния от первого объекта, измеряемое лазерным дальномером, и углом поворота комплекта оборудования для ультразвукового позиционирования и лазерной дальнометрии к одной из осей двумерной системы координат, при этом, грубое определение расположения второго объекта относительно первого осуществляется при помощи взаимодействия приемников ультразвуковых сигналов, расположенных на втором объекте, и ультразвуковой фазированной антенной решетки, являющейся частью комплекта оборудования для ультразвукового позиционирования и лазерной дальнометрии, расположенного на первом объекте.
Заявляемый способ реализуется по следующему алгоритму.
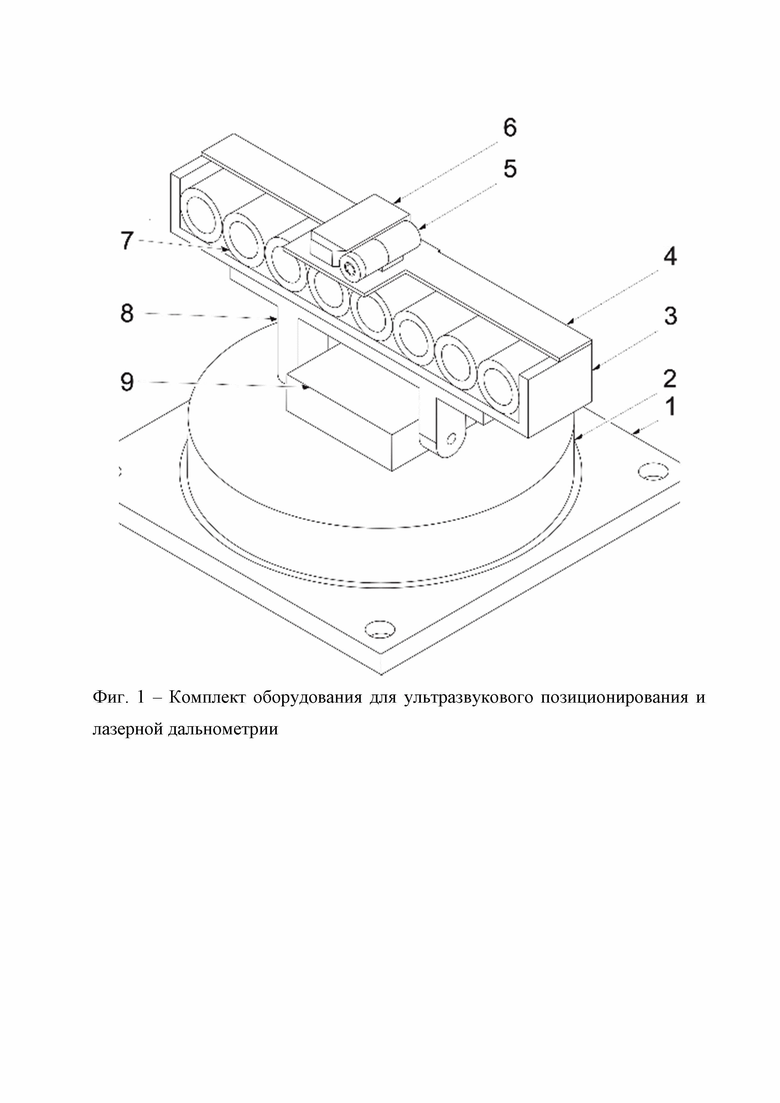
Предварительно устанавливается стационарный первый объект, на котором установлен комплект оборудования для ультразвукового позиционирования и лазерной дальнометрии (фиг. 1), включающий в себя: монтажную пластину 1; поворотную платформу с электроприводом и абсолютным энкодером 2; корпус 3; крепление оптических приборов к корпусу 4; точечный лазерный излучатель 5; лазерный дальномер 6; излучатель ультразвуковой фазированной антенной решетки 7; крепление корпуса к сервоприводу вертикальной подстройки положения датчиков 8; сервопривод вертикальной подстройки положения датчиков 9.
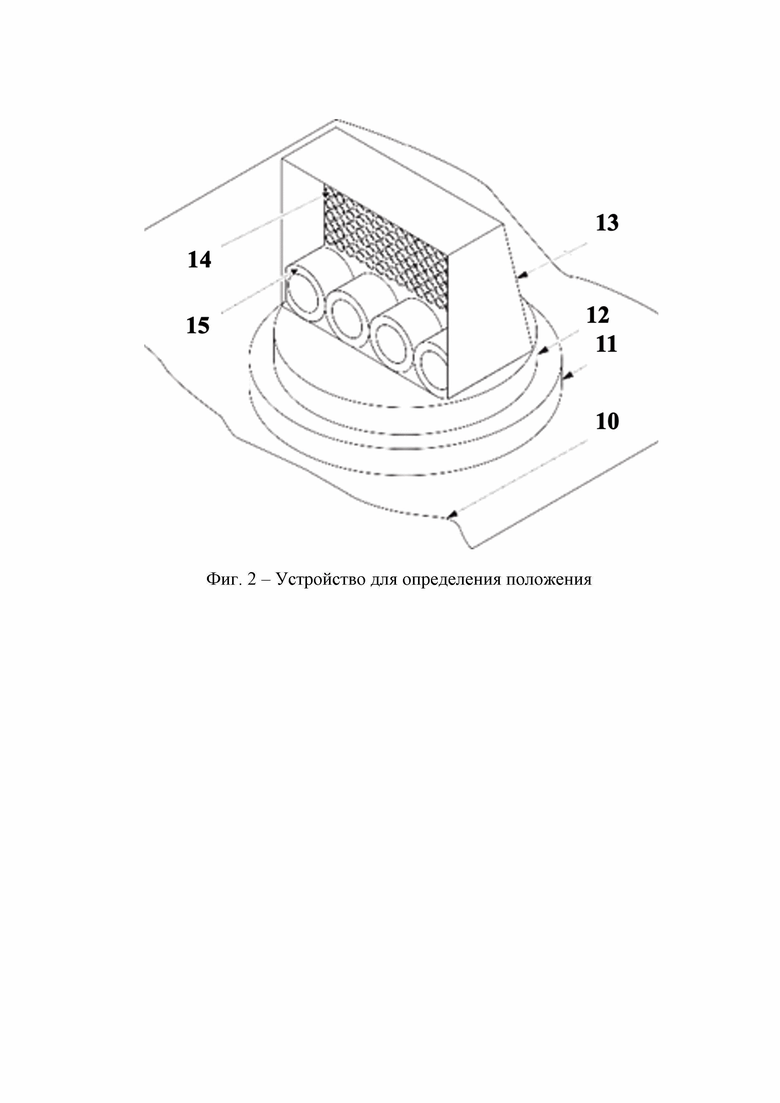
На втором объекте заранее устанавливается устройство для определения положения (фиг. 2), устанавливаемое на поверхность второго объекта 10 и состоящее из: опорной платформы с электроприводом 11; поворотной платформы 12; защитного кожуха 13; панели фотодиодов 14; приемника ультразвуковой фазированной антенной решетки 15.
В ЭВМ создается виртуальная карта в виде двумерной системы координат (X;Y), определяемых при помощи абсолютного энкодера. В качестве нулевой точки виртуальной карты в виде двумерной системы координат принимается положение первого объекта.
На первом этапе реализации способа определения взаимного расположения объектов производится грубое определение направления расположения в момент определения неподвижного второго объекта относительно стационарного первого объекта. Определение направления источника сигнала производится с помощью амплитудного метода, что позволяет достаточно точно спозиционировать устройства друг на друга.
На первом объекте включается излучатель ультразвуковой фазированной антенной решетки 7, а на втором объекте включается приемник ультразвуковой фазированной антенной решетки 15. Для этого поворотная платформа на устройстве для определения положения, расположенного на втором объекте, начинает поворачиваться от положения 0° к положению 359° до достижения максимального качества приема ультразвукового сигнала приемником ультразвуковой фазированной антенной решетки 15.
Далее производится подстройка направления устройств друг на друга по тому же принципу, но поворачивается уже поворотная платформа с электроприводом и абсолютным энкодером 2, установленная на первом объекте, в сторону, с которой был зафиксирован наиболее качественный сигнал. Направление на источник соответствует положению максимума диаграммы направленности, что означает завершение первичной синхронизации друг на друга устройства для определения положения, установленного на втором объекте, и комплекта оборудования для ультразвукового позиционирования и лазерной дальнометрии, установленного на первом объекте. Эта синхронизация означает, что точечный лазерный излучатель 5 находится напротив панели фотодиодов 14 в горизонтальной плоскости.
На втором этапе реализации способа определения взаимного расположения объектов производится корректировка точности направления расположения второго объекта относительно первого объекта. На первом объекте включается точечный лазерный излучатель 5, а сервопривод вертикальной подстройки положения датчиков 9 начинает изменять угол вертикального положения по направлению к плоскости поверхности до тех пор, пока один или несколько фотодиодов на панели фотодиодов 14 не зафиксируют воздействие на них светового пятна от точечного лазерного излучателя 5. Используя электропривод на поворотной платформе с электроприводом и абсолютным энкодером 2 и сервопривод вертикальной подстройки положения датчиков 9, устройство для определения положения, расположенное на втором объекте, ориентируясь на засвеченные световым пятном от точечного лазерного излучателя 5, направляется на центр панели фотодиодов 14.
На третьем этапе реализации способа определения взаимного расположения объектов при помощи лазерного дальномера 6 производится измерение расстояния от первого объекта до второго объекта. На виртуальной карте в виде двумерной системы координат образуется условный прямоугольный треугольник ABC, где прямая между первым объектом, расположенным в точке A, и вторым объектом, расположенным в точке B, является гипотенузой AB, а в качестве катетов принимаются: условная прямая BC, исходящая от второго объекта к оси X двумерной системы координат, перпендикулярная оси X и сама ось X двумерной системы координат AC до условной точки C.
Инструментально измеряется угол CAB, являющийся углом поворота комплекта оборудования для ультразвукового позиционирования и лазерной дальнометрии относительно оси X двумерной системы координат. Длинна катета BC условного прямоугольного треугольника, также являющаяся координатой расположения второго объекта на оси Y на виртуальной карте в виде двумерной системы координат, рассчитывается по формуле BC=AB⋅sinCAB.
Длина катета AC условного прямоугольного треугольника, также являющаяся координатой расположения второго объекта на оси X на виртуальной карте в виде двумерной системы координат, рассчитывается по теореме Пифагора по формуле 
В результате реализации способа определения взаимного расположения объектов на виртуальной карте в виде двумерной системы, на которой расположение первого объекта принимается за начало двумерной системы координат (0;0), расположение второго объекта на двумерной системе координат обозначается его координатами (X;Y), что свидетельствует о достижении технического результата изобретения.
Все этапы, реализуемые в рамках заявляемого способа, основаны на существующих методах ультразвуковой ориентации и лазерной дальнометрии, а все расчеты основаны на известных математических формулах, что свидетельствует о промышленной применимости изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ И РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2713570C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ КООРДИНАТ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2018 |
|
RU2683993C1 |
| Способ измерения формы деталей, изогнутых из листового металлопроката, и устройство для его осуществления | 2018 |
|
RU2685793C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПРОЧНОГО КОРПУСА ПОДВОДНОЙ ЛОДКИ, ЗАКРЫТОГО КОНСТРУКЦИЯМИ ЛЕГКОГО КОРПУСА | 2016 |
|
RU2622230C1 |
Изобретение относится к способам определения взаимного расположения двух объектов без использования спутниковой навигации. Заявленный способ определения взаимного расположения объектов реализуется по трехэтапному алгоритму: грубое определение направления расположения второго объекта относительно первого при помощи метода ультразвуковой ориентации, после чего производится корректировка точности направления расположения второго объекта относительно первого объекта при помощи точечного лазерного излучателя и панели светодиодов, после чего проводятся замеры расстояния между объектами при помощи лазерного дальномера, после чего на основе расстояния между объектами и углом поворота комплекта оборудования для ультразвукового позиционирования и лазерной дальнометрии высчитываются координаты второго объекта на виртуальной карте в виде двумерной системы координат. Техническим результатом является автоматизированное определение расположения объекта. 2 ил.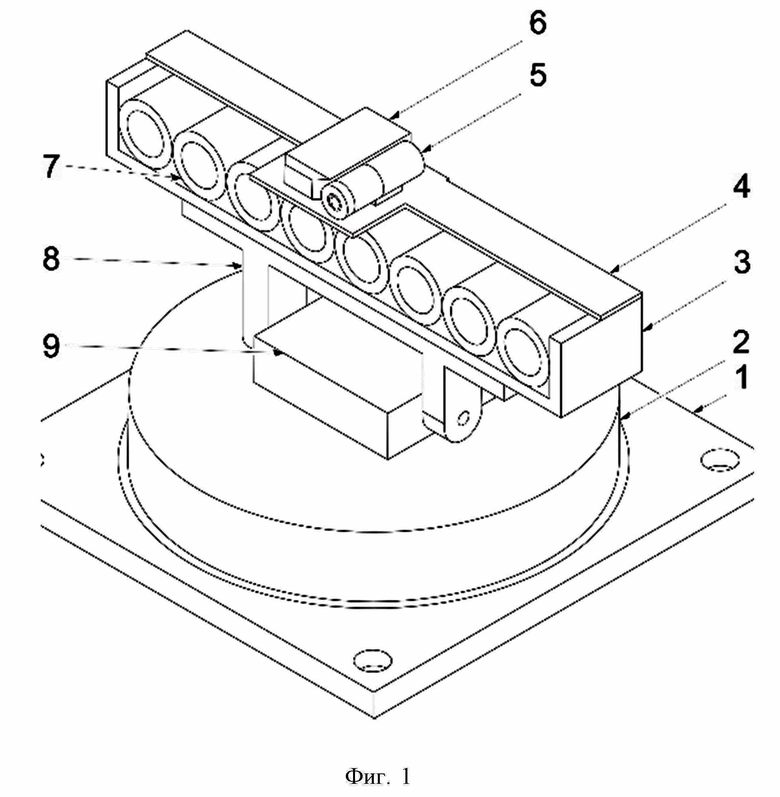
Способ определения взаимного расположения объектов, основанный на построении виртуальной карты в виде двумерной системы координат и определении расположения объектов на ней посредством сочетания методов ультразвукового позиционирования и лазерной дальнометрии, отличающийся тем, что расположение статичного первого объекта, на котором установлен комплект оборудования для ультразвукового позиционирования и лазерной дальнометрии, принимается за исходную точку в двумерной системе координат, а координаты второго объекта, неподвижного на момент определения его расположения, рассчитываются исходя из его расстояния от первого объекта, измеряемое лазерным дальномером, и углом поворота комплекта оборудования для ультразвукового позиционирования и лазерной дальнометрии к одной из осей двумерной системы координат, при этом грубое определение расположения второго объекта относительно первого осуществляется при помощи взаимодействия приемников ультразвуковых сигналов, расположенных на втором объекте, и ультразвуковой фазированной антенной решетки, являющейся частью комплекта оборудования для ультразвукового позиционирования и лазерной дальнометрии, расположенного на первом объекте.
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ, ИХ УГЛОВЫХ КООРДИНАТ И ВЗАИМНОГО РАСПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575318C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2013 |
|
RU2534811C1 |
| US 7237919 B2, 03.07.2007 | |||
| US 8203702 B1, 19.06.2012. | |||

