Изобретение относится к области гидроавтоматики и может быть использовано для привода исполнительных органов ракет, летательных аппаратов и других устройств.
Известен гидравлический привод, описанный в [1], включающий корпус, цифроаналоговый преобразователь (ЦАП) с поршневой цепочкой и штоком, взаимодействующим с золотниковым распределительным устройством. ЦАП связан гидравлическими магистралями с исполнительным двигателем, приводящим в движение выходной вал привода. На выходном валу привода закреплен кулачок обратной связи с эвольвентной образующей, причем окружность эвольвенты соосна с выходным валом привода, на штоке ЦАП установлен ролик. Ось ролика параллельна выходному валу привода и размещена в плоскости, проходящей через ось входного штока ЦАП и линию касания ролика с кулачком. Кроме того, ось выходного штока ЦАП размещена по касательной к окружности эвольвенты кулачка.
Недостатком указанной конструкции является сложность изготовления и высокая стоимость.
Известен гидравлический привод дискретного углового перемещения [2], содержащий поворотный шаговый электродвигатель, связанный зубчатой передачей с установленным на оси плоским поворотным золотником, размещенным между основанием, имеющим каналы напора и слива, и плитой, имеющей распределительные каналы, подключенные к неполноповоротному пластинчатому гидродвигателю, ротор которого кинематически связан с плитой плоского золотника и выполнен с каналами, связанными с распределительными каналами этой плиты и с рабочими камерами гидродвигателя, ограниченными в радиальном направлении ротором и статором, в окружном направлении - пластинами, установленными в роторе и статоре, а в осевом направлении - крышками ротора, установленными на подшипниках в корпусе по обе стороны статора, размещенного в корпусе соосно ротору и зафиксированного от поворота вокруг последнего.
Недостатком указанной конструкции является ограниченность момента, развиваемого в гидродвигателе, зависимость устройства обратной связи от конструкции гидродвигателя.
Наиболее близким к разрабатываемому устройству является электрогидравлический рулевой привод [3], содержащий задающий шаговый электродвигатель, дифференциал, распределительное устройство, силовой исполнительный механизм, датчик нулевого положения шагового электродвигателя, датчик телеметрии и редуктор обратной связи.
Недостатком прототипа является возвратно-поступательное движение исполнительного органа, повышенные требования к точности изготавливаемого плоского золотника.
Технической задачей изобретения является создание экономичного и технологичного электрогидравлического дискретного поворотного двигателя с большим диапазоном развиваемых моментов и автономной системой управления.
Техническим результатом является разработанный электрогидравлический дискретный поворотный двигатель, включающий систему управления в виде автономного агрегата. Повышена технологичность конструкции и снижена стоимость изготовления.
Сущность изобретения состоит в том, что электрогидравлический дискретный поворотный привод содержит автономную систему управления, состоящую из задающего шагового двигателя, на валу которого установлена центральная шестерня планетарного редуктора, внешнее колесо которого через механическую передачу, состоящую из вала и двух зубчатых колес, связано с штоком обратной связи, а сателлиты установлены на водиле, на котором укреплена шестерня, связанная через шток с цилиндрическим распределительным золотником. Вал двигателя механически связан с телеметрическим датчиком положения.
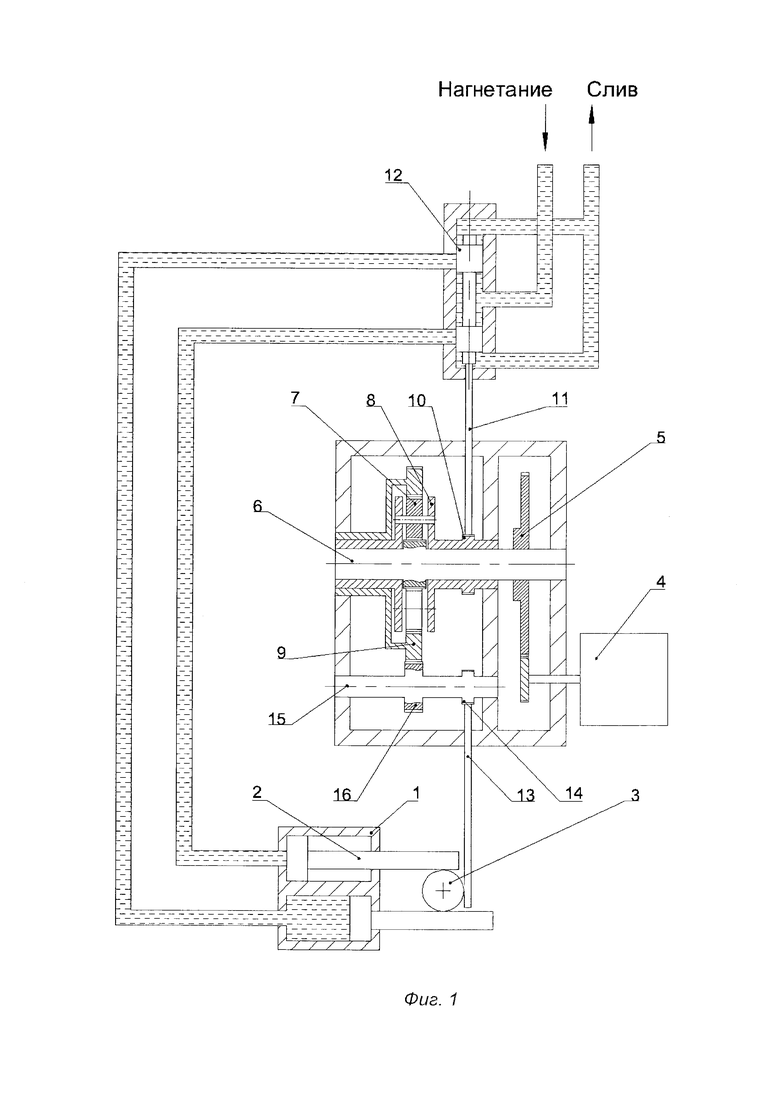
На фиг. 1 представлена принципиальная гидромеханическая схема электрогидравлического дискретного поворотного привода.
В состав привода входит силовая часть, состоящая из корпуса 1, в котором расположены два поршня 2, связанные с выходным вылом 3, введенным в зацепление с датчиком положения (не показан), система управления, содержащая шаговый двигатель 4, связанный с задающим колесом 5, которое укреплено на валу 6 и передает крутящий момент на планетарный редуктор, состоящий из трех сателлитов 7, водила 8, внешнего колеса 9 и центральной шестерни, выполненной заодно с валом 6. Сателлиты 7 через водило 8 взаимодействуют с шестерней 10, связанной с рейкой 11, управляющей цилиндрическим золотником 12, взаимодействующим с поршнями 2. Вал 3 гидропривода, связанный с рейкой обратной связи 13, взаимодействует с колесом 14, установленным на валу 15, и передает крутящий момент через колесо 16 на внешнее колесо 9 планетарного редуктора.
Электрогидравлический поворотный привод работает следующим образом: под действием электрического командного сигнала, поданного в систему управления приводом, шаговый двигатель 4 поворачивается на заданный угол и передает крутящий момент через шестерную 5 на центральное колесо, выполненное заодно с валом 6. При заторможенном внешнем колесе 9 крутящий момент передается через сателлиты 7 и водило 8 на шестерню 10. Связанная с шестерней 10 управляющая рейка 11 смещает цилиндрический распределительный золотник 12 из нулевого положения, тем самым соединяя полости силового модуля с магистралями слива и нагнетания. Под действием давления поршни 2 начинают вращать вал 3 гидропривода, передавая вращение на рейку обратной связи 13, связанную через шестерню 14, вал 15 и колесо 16 с внешним колесом 9. При заторможенном от шагового двигателя 4 центральном колесе 6 крутящий момент от внешнего колеса 9 передается через сателлиты 7 и водило 8 на шестерню 10, связанную с рейкой 11. Управляющая рейка 11 возвращает золотник 12 в нулевое положение, изолируя полости силовой части гидропривода от магистралей слива и нагнетания рабочей жидкости. Подача рабочей жидкости прекращается, привод занимает фиксированное положение.
Источники информации
1. Патент RU №2174626, кл. F15B 9/02 (2000.01).
2. Патент RU №2445517, кл. F15B 9/03 (2006.01).
3. Патент RU №2513055, кл. F15B 9/08 (2006.01).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Рулевое управление с изменяемым передаточным числом | 1971 |
|
SU472047A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| Зажимная головка манипулятора | 1977 |
|
SU839137A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2015 |
|
RU2599098C1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2514812C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ С ПЛАНЕТАРНЫМ РЕДУКТОРОМ САМОХОДНОГО ЭНЕРГЕТИЧЕСКОГО СРЕДСТВА | 1995 |
|
RU2122952C1 |
| Привод горной машины | 1990 |
|
SU1747689A1 |
Электрогидравлический дискретный поворотный привод предназначен для управления исполнительными органами ракет, летательных аппаратов и других устройств. В состав привода входит силовой модуль, состоящий из корпуса с выполненными в нем полостями и двух гидропоршней, вращающих исполнительный вал, который связан со штоком обратной связи и телеметрическим датчиком положения вала; система управления, содержащая шаговый двигатель, задающее колесо, планетарный редуктор, состоящий из центральной шестерни, трех сателлитов, внешнего колеса и водила, при этом планетарный редуктор связан через шестерню и управляющую рейку с цилиндрическим распределительным золотником, к которому подводятся каналы слива и нагнетания рабочей жидкости, и имеет обратную связь от исполнительного вала через шток обратной связи, причем шток обратной связи механически связан с внешним колесом планетарного редуктора через передачу, состоящую из вала с укрепленными на нем двумя зубчатыми колесами. Технический результат - создание электрогидравлического дискретного поворотного привода с автономной системой управления, повышение технологичности конструкции и снижение стоимости производства. 1 ил.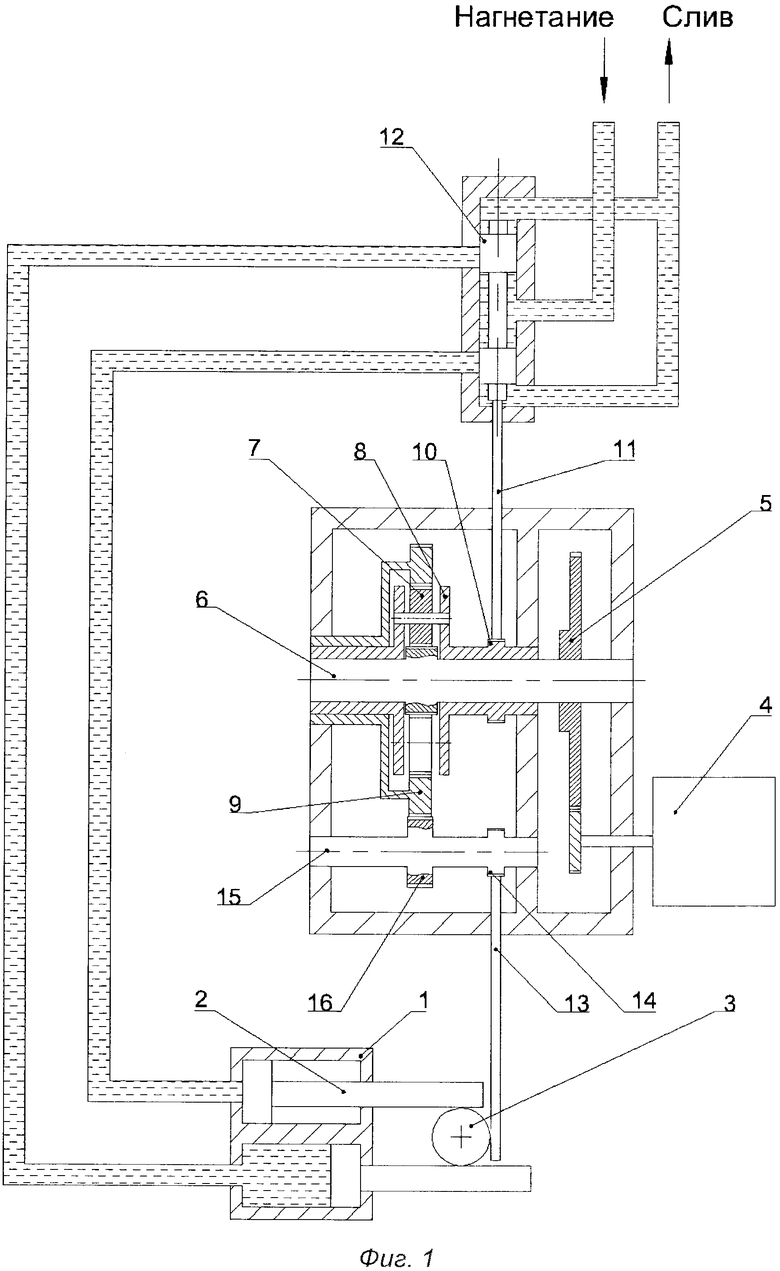
Электрогидравлический дискретный поворотный привод, содержащий силовой модуль, состоящий из корпуса с выполненными в нем полостями и двух гидропоршней, вращающих исполнительный вал, который связан с штоком обратной связи, систему управления, содержащую шаговый двигатель, задающее колесо, планетарный редуктор, состоящий из центральной шестерни, трех сателлитов, внешнего колеса и водила, при этом планетарный редуктор связан через шестерню и управляющую рейку с цилиндрическим распределительным золотником, к которому подводятся каналы слива и нагнетания рабочей жидкости, и имеет обратную связь от исполнительного вала через шток обратной связи, причем шток обратной связи механически связан с внешним колесом планетарного редуктора через передачу, состоящую из вала с укрепленными на нем двумя зубчатыми колесами.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ДИСКРЕТНОГО УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2445517C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД И СПОСОБ РЕГУЛИРОВКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2000 |
|
RU2174626C1 |
| Бункерное устройство для трудносыпучих материалов | 1982 |
|
SU1065303A1 |
| US 4363211 A, 14.12.1982. | |||

