Настоящее изобретение относится к распределенному автоматизированному устройству для лабораторной диагностики.
В настоящее время в лабораториях для исследований проб биологических материалов обычным является использование систем с механическим приводом, вдоль которых эти пробы перемещаются внутри специальных контейнеров с биологическими препаратами, встречая различные приборы или модули вдоль их пути, выполненные с возможностью осуществления различных обработок (открывание, закрывание самих контейнеров, центрифугирование их содержимого и т.д.) самих проб, или другие модули, имеющие другую функцию, т.е. осуществляющие взаимодействие контейнеров с биологическими препаратами с фактическими приборами для исследований самой пробы.
Автоматизированное управление адресацией проб, представленных вдоль различных модулей, осуществляется центральным блоком управления, т.е. компьютером, снабженным программным обеспечением, разработанным для подходящей сортировки проб согласно конкретным действующим требованиям для каждого из них; такое программное обеспечение фактически содержит всю информацию, необходимую для действий, требуемых каждой отдельной пробой на её пути вдоль всего автоматического устройства.
В этом отношении системная архитектура является централизованной архитектурой, поскольку задача контроля всей последовательности действий, а также пошаговое управление различными этапами срабатываний каждого отдельного модуля, является прерогативой только такого центрального блока управления. Каждый из модулей, присутствующих вдоль автоматического устройства (либо для предварительного исследования, пост-исследования, либо модули для осуществления взаимодействия с анализаторами), является простым исполнителем команд, принимаемых от центрального блока управления, и должен, следовательно, управляться последним при осуществлении каждого отдельного действующего этапа.
В централизованной архитектуре этого типа возникают проблемы, поскольку центральный блок управления спроектирован для управления компонентами (как аппаратными средствами, так и программным обеспечением), которые характеризуют каждый функциональный вариант конкретного модуля.
Введение многочисленных вариантов одного и того же модуля вдоль автоматизированной системы влечет за собой значительные модификации конструкции центрального блока управления, который должен быть сконфигурирован на основе совместного присутствия многочисленных одинаковых модулей, способных выполнять одни и те же функции.
Следовательно, поскольку согласно конкретным требованиям каждой лаборатории каждая система имеет различные модули, а также различное число вариантов для каждого модуля, модификации конструкции, относящиеся к центральному блоку управления, являются конкретными для каждой из указанных выше систем, т.е. они не являются воспроизводимыми или многократно используемыми от одной к другой.
Кроме того, в случае неисправности или начала процедуры технического обслуживания даже на одном из модулей, представленных вдоль автоматизированной системы, вся система должна быть установлена в режим ожидания, поскольку централизованное управление посредством блока управления распознает неисправный модуль как системное «бутылочное горлышко», и поскольку действия, относящиеся к нему, строго связаны с действиями других модулей (т.е. он не независим от других модулей с точки зрения программного обеспечения), причем система не способна временно изолировать только неисправный модуль, продолжая обработку пробы другими модулями.
В конце концов, возможно управление оператором средствами ручного управления, которые должны быть приданы различным компонентам автоматизированной системы, благодаря присутствию отдельного графического интерфейса пользователя (ГИП), находящегося в месте, близком к автоматизированному устройству; это требует физического присутствия оператора вблизи системы в любое время для осуществления управляющих действий и, необязательно, адресации проб и динамического переназначения задач различным модулям системных компонентов.
Заявки на патенты США US-2006/0148063 и US-2005/036912 раскрывают устройства для непрерывной последовательности операций обработки биологических проб.
Задачей настоящего изобретения является обеспечение автоматизированного устройства, которое, с точки зрения архитектуры, позволяет преодолеть вышеописанные проблемы, в то же время гарантируя динамическое управление адресацией проб биологических материалов вдоль самого устройства, и таким образом, чтобы пробы непрерывно двигались более плавным образом по сравнению с известными решениями.
Дополнительная задача состоит в предотвращении остановки всего автоматизированного устройства в случае неисправности или технического обслуживания одного или более из модулей, включенных в автоматизированное устройство.
Наконец, не менее важной задачей является освобождение от необходимости постоянного присутствия оператора вблизи автоматизированной системы.
Эти и другие задачи решаются распределенной автоматизированной системой для лабораторной диагностики, которая раскрыта в п.1 формулы изобретения.
Эти и другие признаки настоящего изобретения будут более понятны из последующего подробного описания варианта его осуществления, выполненного посредством не ограничивающего примера со ссылкой на сопутствующие чертежи, на которых:
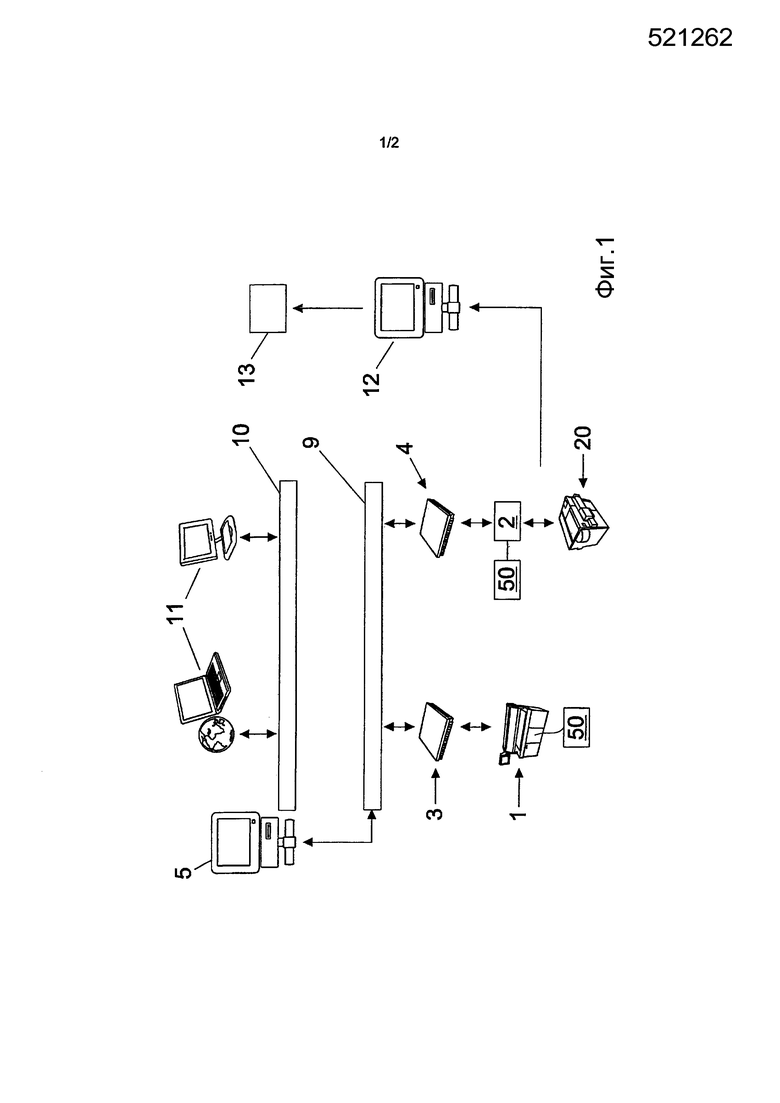
фиг.1 показывает блок-схему с основными элементами устройства согласно изобретению;
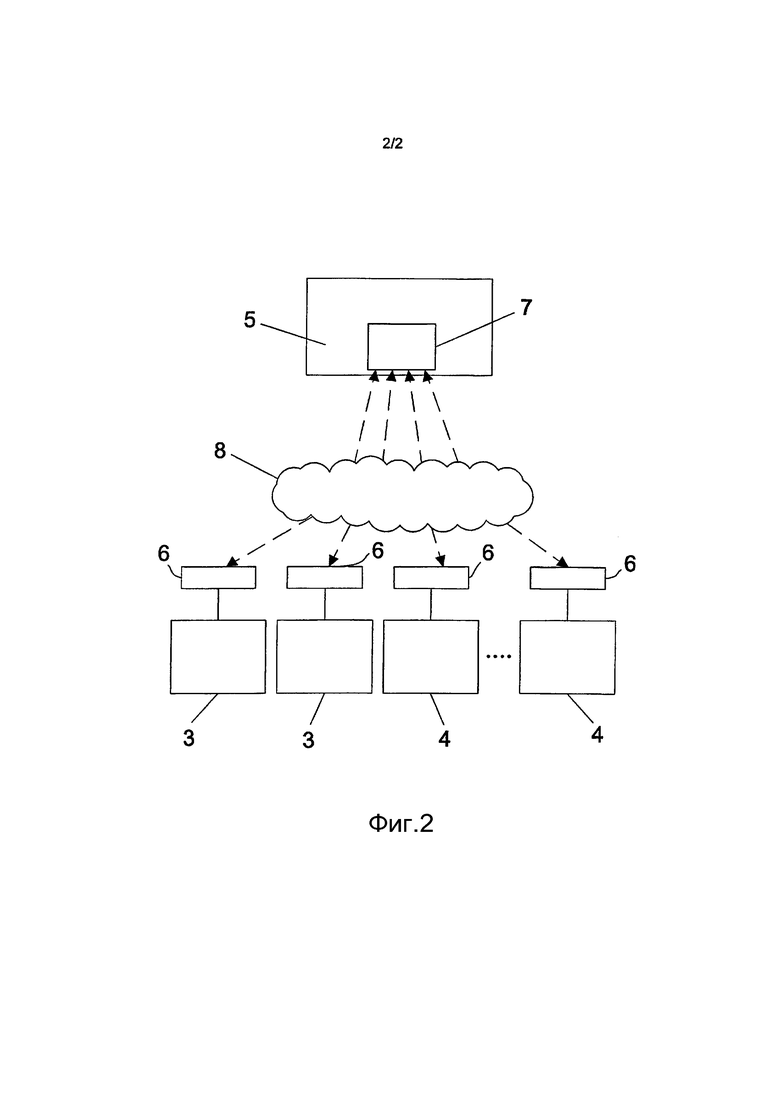
фиг.2 показывает более подробно осуществление взаимодействия между центральным блоком управления и различными модулями.
Лабораторное автоматизированное устройство состоит из автоматического конвейера, выполненного с возможностью транспортировки, посредством подходящих конвейерных лент, контейнеров с биологическими препаратами, например, пробирок, вставленных в специальные транспортные приспособления, от одной точки до другой самого устройства и, в частности, от одного до другого из модулей, представленных в устройстве. Более точно, имеются модули 1, способные автономно управлять действиями по обработке контейнеров с биологическими препаратами, осуществляя большинство разнообразных действий, обычных для лабораторных систем этого типа (и, таким образом, например, открывание, закрывание пробирок, центрифугирование их содержимого, разделение содержимого исходной пробирки по множественным дочерним пробиркам и т.д.), или модули 2, которые не осуществляют никаких действий с пробирками, но осуществляют взаимодействие модулей автоматизированного устройства с фактическими приборами 20 для анализа с исследованием проб биологических препаратов из пробирок.
Естественно, каждый из модулей 1, 2 является связанным только с определенным числом пробирок согласно различным обработкам или исследованиям, которые требует каждая проба; следовательно, пробирки, вставленные в специальные транспортные приспособления (также называемые «держатели», не показаны на фигурах), перемещаются вдоль автоматического конвейера и адресуются соответствующим модулям 1, 2.
Каждый модуль 1, 2, присутствующий вдоль автоматизированного устройства, соответствует узлу 3, 4 (фиг.1, со ссылкой на модули 1, 2, соответственно), который на уровне программного обеспечения имеет задачу сортировать или нет каждое из транспортных приспособлений, достигающих самого модуля 1, 2, и, таким образом, например, обеспечить действия по переадресации проб, содержащихся в пробирках, от основного маршрута к вспомогательному маршруту конвейера, или по адресации проб, содержащихся в пробирках, в направлении U-образных или Т-образных участков конвейера для выполнения их взаимодействия с модулем 1, 2.
Вся последовательность действий управляется посредством центрального блока 5 управления, который осуществляет взаимодействие с каждым узлом 3, 4, представленным в устройстве, обеспечивая рабочий список 6 для узла 3, 4, причем этот рабочий список содержит список транспортных приспособлений, подлежащих обработке модулями 1, 2, ряд переменных, представляющих различные свойства и/или идентификационные коды, указанные для каждого транспортного приспособления и/или соответствующей пробирки в автоматизированном устройстве, состояние транспортного приспособления и состояние пробирок. Упомянутый центральный блок 5 управления динамически считывает и обновляет упомянутый рабочий список 6.
Рабочий список 6 предоставляет каждому узлу 3, 4 точную информацию о состоянии каждого из транспортных приспособлений (и возможной соответствующей пробирки, содержащейся в каждом из них) в любое время. Каждый модуль 1, 2 осуществляет взаимодействие с транспортными приспособлениями и с пробирками и, как результат, согласно наиболее подходящей последовательности действий, которую каждый модуль 1, 2 определяет независимо от центрального блока 5 управления, каждый модуль 1, 2 может осуществлять обработку самих транспортных приспособлений и самих пробирок поочередно, динамически считывая и обновляя рабочий список 6.
Естественно, собственный интеллект всего устройства, управляемого центральным блоком 5 управления, адресует транспортные приспособления и соответствующие пробирки посредством обновления рабочего списка 6, который считывается узлами 3, 4, которые сортируют контейнеры с биологическими препаратами только в направлении подходящих модулей 1, которые осуществляют действия, необходимые каждой пробирке, и/или в направлении модулей 2, осуществляющих взаимодействие с подходящими приборами 20 для анализа проб, содержащихся в пробирках. Узлы 3, 4 обмениваются информацией о сортировке с центральным блоком 5 управления таким образом, чтобы центральный блок 5 управления обновил рабочий список 6 на узлах 3, 4.
Однако, в самых общих чертах, адресация может также относиться к пустым транспортным приспособлениям, т.е. не содержащим пробирки, так как, например, для центрального блока 5 управления может быть необходимо обновить рабочие списки 6 для выполнения сортировки транспортных приборов на узлах 3, 4 посредством отведения их от основного маршрута к вспомогательному маршруту конвейера, безотносительно к тому, содержат ли такие транспортные приспособления пробирку или нет.
Центральный блок 5 управления является компьютером, снабженным программным обеспечением 7, которое способно обмениваться информацией с отдельными узлами 3, 4 автоматизированного устройства и динамически считывать и обновлять рабочие списки 6, относящийся к каждому узлу 3, 4, согласно изменяемым требованиям обработки пробирок, причем эти требования могут изменяться в любое время в этом автоматизированном устройстве. Упомянутые обновления могут быть связаны, например, с добавлением или удалением транспортных приспособлений (и соответствующих проб, содержащихся в пробирках) в/из рабочего списка 6, или с модификацией уровня приоритета обработки пробы, содержащейся в пробирке, и т.д.
Подобным образом, информация и обновления относительно текущего состояния каждого транспортного приспособления, перемещающегося вдоль автоматизированного устройства, должны обновляться в рабочих списках 6, подлежащих считыванию центральным блоком 5 управления.
На практике обмен информацией между центральным блоком 5 управления и различными узлами 3, 4 является двунаправленным; осуществление взаимодействия имеет место посредством CAN сети 8, а используемым протоколом является CANopen (фиг.2).
Следовательно, центральный блок 5 управления присоединяется, с одной стороны, к узлам 3, 4 посредством сети 9 автоматизации (фиг.1), в то время как с другой стороны он присоединяется через локальную сеть 10 Ethernet к различным графическим интерфейсам 11 пользователя (ГИП), разработанным для управления оператором (посредством удобного сенсорного экрана) средствами управления, которые должны быть вручную приданы каждому из модулей 1, 2, или даже для деятельности по анализу статистики или диагностик отдельных модулей. Центральный блок 5 управления обновляет соответствующий рабочий список 6 на подходящем узле 3, 4 таким образом, что ручное управление оператором соответствующим образом достигает подходящего модуля 1, 2. Такое соединение может быть или прямым посредством LAN-кабеля, или удаленным через сеть Internet. Узлы 3, 4, в свою очередь, присоединяются двунаправленно посредством соответствующих автоматизированных модулей 1 или посредством модулей 2, осуществляющих взаимодействие с приборами 20 для анализа. Модули 1, 2 обновляют соответствующие рабочие списки 6, поскольку они выполняют действия независимо от центрального блока 5 управления.
Кроме того, результатами различных исследований проб, осуществленных приборами 20 для анализа автоматизированного устройства, и которые могут отображаться на экране каждого из упомянутых ГИП 11, затем обеспечиваются лабораторная информационная система 12 (ЛИС), т.е. система, которая управляет персональной информацией пациентов и, с помощью обработки и хранения информации, сгенерированной различными механизмами, представленными вдоль автоматизированного устройства, она способна собрать все такие данные и вывести данные, интерпретированные для медицинского отчета. В свою очередь, ЛИС 12 может осуществлять взаимодействие в более широком смысле со всей больничной информационной системой 13 (БИС), предназначенной в качестве набора всех информационных инструментов, используемых в области здравоохранения для управления как административными, так и клиническими алгоритмами больницы.
Рассматривая автоматизированное устройство как целое, получение требуемой пропускной способности обработки определенного количества проб в течение заданной единицы времени определяется совместной работой множества модулей 1, 2, принадлежащих всему автоматизированному устройству. Следовательно, целесообразно максимизировать как пропускную способность отдельного модуля 1, 2, так и, в более широком смысле, синхронизировать совместную работу всех модулей 1, 2, представленных для максимизации общей пропускной способности автоматизированного устройства.
Инновационный признак данного изобретения определяется тем фактом, что каждый из модулей 1, 2, используемых в автоматизированном устройстве, независим от других модулей, будучи обеспеченным своей собственной панелью 50 управления, которая позволяет ему автономно управлять последовательностью действий по обработке проб биологических материалов, содержащихся в пробирках и действиями, подлежащими осуществлению над теми же пробирками на основе считывания рабочего списка 6 и его обновления в то время, когда модуль 1, 2 осуществляет действия по обработке. Осуществление взаимодействия с центральным блоком 5 управления имеет место, когда блок 5 управления обменивается информацией с узлом 3, 4, имеющим отношение к считыванию, передавая ему или обновляя рабочий список 6, и в дальнейшем, с другой стороны, на этапе, на котором модуль 1, 2 считывает и обновляет рабочий список 6, узел 3, 4 обменивается информацией с блоком 5 управления. Модуль 1, 2 обменивается информацией о результатах своей обработки проб с узлом 3, 4, а узел 3, 4, в свою очередь, обменивается информацией об упомянутых результатах с блоком 5 управления. Дополнительно, чтобы поддержать сопоставимость в отношении передвижения транспортного приспособления, и, необязательно, соответствующей пробирки, в модуле 1, 2 во время его обработки обеспечиваются непрерывные обновления информации посредством модуля 1, 2 для узла 3, 4 и, следовательно, для центрального блока 5 управления, о логическом/физическом состоянии каждого транспортного приспособления и пробирок.
Во время обработки проб каждый модуль 1, 2 управляет действиями автономно и независимо от центрального блока 5 управления; фактически, поскольку модуль 1, 2 управляет транспортным приспособлением, логика выполнения является прерогативой самого модуля 1, 2, в отличие от того, что происходит с модулями известных систем, в которых эта логика является свойством центрального блока 5 управления. Следовательно, в этом отношении предпочтительно был выполнен переход от централизованной архитектуры к более быстрой, распределенной архитектуре.
Другими словами, исходный код, связанный с управлением каждым модулем 1, 2, присоединенным к этому устройству, теперь содержится непосредственно в самом модуле 1, 2 или лучше в его панели 50 управления, в то время как в известном устройстве код, связанный с управлением каждым отдельным модулем, является составной частью единственного кода, находящегося в центральном блоке 5 управления.
Таким образом, теперь, как только он получил (через CAN сеть 8 и связанный протокол обмена данными CANopen) свой рабочий список 6 от соответствующего узла 3, 4, каждый модуль 1, 2 способен затем автономно управлять соответствующей последовательностью действий и, таким образом, своей способностью обрабатывать пробы, содержащиеся в пробирках; напротив, этого не происходит в известных решениях, где каждый модуль все еще нуждается в пошаговой подаче указаний от центрального блока 5 управления при выполнении каждого, даже минимального, действия.
Это подразумевает дополнительный важный аспект, связанный с распределенной архитектурой, подобной архитектуре данного изобретения: фактически, если по какой-либо причине необходимо модифицировать часть исходного кода, относящегося к одному из модулей 1, 2 этого устройства, то такая упомянутая модификация касается исходного кода, который является не связанным с исходным кодом других модулей 1, 2 и центрального блока 5 управления и независим от них; напротив, в известных решениях, независимо от того, на основании чего действует модуль, полный код, подлежащий модификации, всегда находится в центральном блоке 5 управления, причем имеются значительные сложности при записи этой модификации в сам этот код, поскольку всегда необходимо учитывать взаимосвязи, существующие между рассматриваемым модулем и всеми остальными модулями, а также, возможно, модулями, никак не затронутыми какой-либо модификацией.
Это приводит к дополнительному заметному практическому преимуществу: согласно настоящему изобретению, если действия по техническому обслуживанию или поиску неисправностей должны быть осуществлены на одном из модулей 1, 2, принадлежащих данному автоматизированному устройству, то модуль может быть установлен в режим ожидания и временно изолирован от остальной части автоматизированного устройства, которое продолжает функционировать обычным образом. Напротив, это невозможно в известных решениях, так как они характеризуются централизованной архитектурой, которая как упомянуто, была бы таковой, если бы модули 1, 2 всегда были присоединены друг к другу, и, таким образом, установка одного в режим ожидания была бы равносильна установке всего автоматизированного устройства в режим ожидания.
Кроме того, с распределенной архитектурой возможно осуществление взаимодействия автоматизированного устройства с теоретически неограниченным множеством модулей 1, 2, даже, необязательно, с различными блоками модулей 1, 2, выполненных с возможностью осуществления той же функции, например, в различных точках вдоль автоматизированного устройства для дополнительного увеличения скорости обработки биологических проб. Таким образом, преодолена вышеописанная проблема, относящаяся к известным решениям, т.е. трудность осуществления взаимодействия многочисленных вариантов одного и того же модуля с единственной системой, вследствие модификаций конструкции, которые это подразумевают, на уровне центрального блока 5 управления. В приведенном выше решении с одной стороны любое добавление новых модулей 1, 2 не подразумевает таких модификаций, и, следовательно, они могут быть свободно добавлены согласно требованиям каждой системы.
Кроме того, устройство согласно настоящему изобретению может быть выполнено с возможностью управления через локальную сеть 10 Ethernet, через прямое соединение с использованием LAN-кабеля или удаленно, посредством подключения к сети Internet, от множества графических интерфейсов 11 пользователя. Они могут быть представлены в изменяемом количестве и располагаться заметным образом в различных точках лаборатории или даже за ее пределами. Это также является абсолютно инновационным признаком по сравнению с известным автоматизированным устройством, которое может управляться посредством единственного графического интерфейса пользователя, представленного на месте, где располагается автоматизированное устройство.
На практике видно, что распределенное автоматизированное устройство, которое описано, может решать намеченные задачи, гарантируя независимость, в пределах этого устройства, каждого из модулей, принадлежащих этому автоматизированному устройству, а также возможность помещения теоретически неограниченного числа модулей в само устройство, либо модулей 1, выполненных с возможностью выполнения операций над пробирками, содержащими пробы, либо модулей 2 для осуществления взаимодействия с приборами 20 для анализа проб биологических материалов, содержащихся в самих пробирках.
В случае неисправности или технического обслуживания на одном из модулей 1, 2, распределенная логическая архитектура позволяет остальной части автоматизированного устройства все еще сохранять функционирование посредством временной изоляции только модуля 1, 2, имеющего отношение к неисправности, и гарантирует обычный режим эксплуатации других представленных модулей 1, 2.
Кроме того, возможность придания средств управления каждому из модулей 1, 2, представленных в автоматизированном устройстве, от определенного числа различных рабочих станций 11, предусматривает адресацию проб, содержащихся в пробирках в автоматизированном устройстве, подлежащем модификации согласно любому типу нового требования, которое может возникнуть, без строгого требования присутствия оператора в исследовательской лаборатории, но скорее, необязательно, удаленно через соединение с сетью Internet, и, таким образом, даже на расстоянии тысяч километров и в любое время суток, например, в ночное время.
Кроме того, поскольку блок управления больше не должен выдавать команды каждому модулю 1, 2 пошагово при выполнении каждой отдельной операции, поток информации, которой должны обмениваться центральный блок 5 управления и различные модули 1, 2, уменьшается по сравнению с известными решениями, поскольку модули 1, 2 теперь управляются автономной панелью 50 управления и, следовательно, независимы от центрального блока 5 управления.
Таким образом, некоторые изменения и модификации могут быть применены к данному изобретению, причем все находящиеся в пределах объема изобретательского замысла.
На практике, используемые материалы, а также формы и размеры, могут быть любыми согласно требованиям.
Заявленное изобретение относится к средствам для лабораторной диагностики проб биологических материалов. Предложенное распределенное автоматизированное устройство для лабораторной диагностики содержит модули (1) для обработки биологических препаратов, перемещаемых на автоматическом конвейере, и модули (2) для осуществления взаимодействия с приборами (20) для анализа, причем оба упомянутых модуля (1, 2) присоединены к упомянутому автоматическому конвейеру, каждый из упомянутых модулей (1, 2) независим от других модулей (1, 2), причем он обеспечен своей собственной панелью (50) управления, которая позволяет ему функционировать автономно и независимо от центрального блока (5) управления, который обеспечивает рабочий список (6) для каждого узла (3, 4), который динамически считывается и обновляется упомянутым блоком (5) управления, а упомянутый модуль (1, 2) считывает и обновляет упомянутый рабочий список (6). Данное изобретение позволяет обеспечить непрерывное и плавное движение проб и предотвращение остановки всего устройства в случае неисправности одного или нескольких модулей. 4 з.п. ф-лы, 2 ил.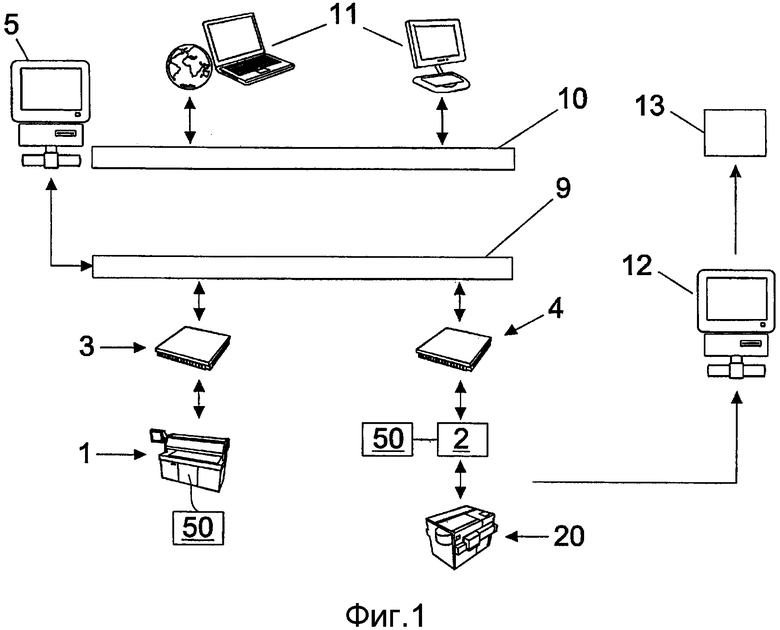
1. Распределенное автоматизированное устройство для лабораторной диагностики, содержащее
модули (1) для осуществления действий различных типов над контейнерами с биологическими препаратами, причем контейнеры вставлены в специальные транспортные приспособления, которые перемещаются на автоматическом конвейере, и модули (2) для осуществления взаимодействия с приборами (20) для анализа проб биологических препаратов, причем оба упомянутых типа модулей (1, 2) присоединены к упомянутому автоматическому конвейеру,
центральный блок (5) управления, обеспечивающий рабочие списки (6) для соответствующих модулей (1, 2), динамически считываемые и обновляемые упомянутым центральным блоком (5) управления,
причем каждый из упомянутых модулей (1, 2) независим по отношению к другим модулям (1, 2) и снабжен своей собственной панелью (50) управления,
причем упомянутое устройство также содержит узлы (3, 4) между упомянутым центральным блоком (5) управления и упомянутыми модулями (1, 2), при этом предусмотрен один узел (3, 4) для каждого модуля (1, 2),
причем упомянутый центральный блок (5) управления передает рабочий список (6) каждому узлу (3, 4) для каждого модуля (1, 2),
отличающееся тем, что
каждый модуль (1, 2) считывает и обновляет соответствующий рабочий список (6) на соответствующем узле (3, 4) результатами своей обработки пробы, причем каждый узел (3, 4), в свою очередь, передает упомянутые результаты в центральный блок (5) управления.
2. Устройство по п.1, отличающееся тем, что соединение между упомянутыми модулями (1, 2), упомянутыми узлами (3, 4) и упомянутым центральным блоком (5) управления реализуется через CAN сеть (8) и соответствующий протокол обмена данными типа CANopen.
3. Устройство по п.1 или 2, отличающееся тем, что центральный блок (5) управления соединен с узлами (3, 4) через сеть (9) автоматизации и соединен через локальную сеть (10) Ethernet с множеством графических пользовательских интерфейсов (11), разработанных для управления оператором средствами управления, которые должны быть вручную приданы каждому из модулей (1, 2), или даже для деятельности по анализу статистики или диагностик отдельных модулей (1, 2).
4. Устройство по п.1 или 2, отличающееся тем, что результаты различных исследований проб, осуществленных приборами (20) для анализа, предоставляются лабораторной информационной системе (12), выполненной с возможностью осуществления взаимодействия со всей больничной информационной системой (13), предназначенной в качестве совокупности всех информационных инструментов, используемых в области здравоохранения для управления как административными, так и клиническими потоками больницы.
5. Устройство по п.3, отличающееся тем, что результаты различных исследований проб, осуществленных приборами (20) для анализа, предоставляются лабораторной информационной системе (12), выполненной с возможностью осуществления взаимодействия со всей больничной информационной системой (13), предназначенной в качестве совокупности всех информационных инструментов, используемых в области здравоохранения для управления как административными, так и клиническими потоками больницы.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 5988857 A, 23.11.1999 | |||
| US 7226788 B2, 05.06.2007. | |||

