Настоящее изобретение относится к технологической установке устройств для транспортировки контейнеров биологического препарата.
В настоящее время в лабораториях для испытания образцов биологического материала возрастает использование автоматизированных систем, которые обеспечивают автоматическую идентификацию, транспортировку и адресацию этих образцов к различным местам лаборатории. В частности, заявитель уже зарегистрировал более ранний патент EP-2225567, который описывает систему этого типа.
Описанная система содержит автоматический конвейер, в котором каждый контейнер для биологического препарата перемещается внутри транспортирующего устройства (также называемого "носителем") на конвейерных лентах вдоль дорожек для соответствующей адресации к различным модулям, которые взаимодействуют с такой автоматизированной системой и являются или модулями натурных испытаний, или предназначены для выполнения конкретной пред- или постконтрольной операции на контейнерах после их поступления (например, погрузки/разгрузки, открывания, закупоривания, разделения содержимого на центрифуге и т.д.).
Автоматический конвейер состоит из отдельных технологических установок, расположенных последовательно одна за другой и каждая из которых содержит главную и вспомогательную дорожки. В частности, за счет управления посредством блока управления интеллектуальная автоматизированная система лаборатории способна сортировать каждое отдельное транспортирующее устройство и соответствующий контейнер внутри каждой из упомянутых технологических установок в зависимости от типа операций, которые будут осуществляться на нем, и это или соответствует, или не соответствует отклонению транспортирующего устройства от главной транзитной дорожки к вспомогательной дорожке, а также последующему возврату ранее отклоненного транспортирующего устройства на главную дорожку.
Для того чтобы отслеживать его путь и контролировать его правильную адресацию внутри каждой отдельной технологической установки, положение движущегося транспортирующего устройства регистрируется посредством аппаратуры для обнаружения транспортирующих устройств. Такая аппаратура способна идентифицировать присутствие и индивидуальность транспортирующего устройства в режиме реального времени по его пути вдоль транспортирующей системы. Это основано на радиочастотной идентификационной (RFID) технологии, содержащей сеть антенн, распределенных под конвейерной лентой транспортирующей системы, которые при прохождении транспортирующего устройства способны принимать данные, передаваемые приемопередатчиком, содержащимся в корпусе транспортирующего устройства.
Такой приемопередатчик представляет собой устройство, снабженное внутренней памятью, способной хранить и передавать данные; он не требует источника питания, так как он получает питание от магнитного поля, генерируемого сетью антенн. При прохождении транспортирующего устройства по ленте близко к антенне, электромагнитное поле, генерируемое антенной, обеспечивает энергией приемопередатчик, который модуляцией такого электромагнитного поля передает данные, хранящиеся в его памяти, на эту антенну. То, что хранится в памяти приемопередатчика транспортирующего устройства, является идентификационным кодом, который позволяет транспортирующему устройству самому быть опознанным. Это означает, что каждое транспортирующее устройство является связанным с уникальным и персональным идентификационным кодом. Однажды принятый антенной информационный идентификационный код передается в блок управления, который, основываясь на местоположении антенны, предоставившей информацию, ассоциирует местоположение транспортирующего устройства на ленте. Антенны, расположенные под лентой, стратегически распределены вдоль транспортирующей системы: антенны предусмотрены в каждой точке, где необходимо контролировать или знать индивидуальность транспортирующего устройства для принятия решения о его пути и сохранения его жизненного цикла (например, в местах отклонения между главной и вспомогательной дорожками или в местах, где контейнеры биологического препарата обрабатываются модулями).
Идентификация транспортирующего устройства посредством антенны обеспечивается наличием останавливающего затвора, расположенного рядом с каждой антенной. Останавливающий затвор блокирует транспортирующее устройство прямо в месте, где расположена под лентой антенна, позволяя антенне принять его идентификационный код, посланный приемопередатчиком транспортирующего устройства.
Идентификационная информация транспортирующего устройства, идентифицированная антенной, передается в блок управления, который при необходимости направляет транспортирующее устройство к соответствующим модулям предварительного тестирования, тестирования или посттестирования, отклоняя его путь с главной дорожки на вспомогательную дорожку выступающей частью пневматического приводного рычага от внутренней боковой стенки главной дорожки.
Аналогичным образом, каждый раз, когда транспортирующее устройство после сопряжения с заранее определенным операционным модулем освобождается после его обработки и его необходимо возвратить на главную дорожку, прохождение транспортирующих устройств вдоль главной дорожки должно быть заблокировано в то же время для предотвращения столкновения возвращающегося транспортирующего устройства с одним из последних, вызывая блокировку движения транспортирующих устройств вдоль автоматики. В известных решениях цель достигается с помощью датчика, который обнаруживает прохождение транспортирующего устройства, как правило, на конечном участке вспомогательной дорожки, чтобы затем связаться с блоком управления, который блокирует снова посредством останавливающего затвора любое прохождение транспортирующего устройства, приходящего с его главной дорожки.
Таким образом, возникают проблемы как в отношении отклонения транспортирующих устройств, так и их последующего возвращения, в связи с тем, что в известных решениях эти два процесса замедляются.
В самом деле, в первом случае, всегда необходимо остановить каждое транспортирующее устройство посредством останавливающего затвора, как только что описано, близко к самому отклонению, для того чтобы позволить антенне, расположенной под лентой, считать идентификационные данные транспортирующего устройства и соответствующим образом направить его, для отклонения или нет, после взаимодействия с блоком управления.
Во втором случае, каждый раз, когда транспортирующее устройство должно вернуться со вспомогательной дорожки на главную дорожку, описанный выше механизм должен быть приведен в действие для блокировки прохождения транспортирующих устройств вдоль главной дорожки.
В общем, движение транспортирующих устройств вдоль технологической установки, следовательно, замедляется на обоих этапах: отклонения транспортирующих устройств на вспомогательную дорожку (с тем чтобы они взаимодействовали с заданным операционным модулем), а впоследствии возвращения на главную дорожку. Учитывая, что лабораторная автоматизированная система состоит из множества технологических установок, каждая из которых выполняет определенную операцию на образцах, следует понимать, что образец за образцом, а также установка за установкой, понятно, в результате замедляются.
Кроме того, любые ошибки или неполадки при приведении в действие затвора на обоих этапах могут привести к неудачной остановке транспортирующих устройств, поступающих с главной дорожки. В случае отклонения, следовательно, антенна, расположенная близко к затвору, не в состоянии идентифицировать транспортирующее устройство, а это может привести к ошибке в адресации транспортирующих устройств, которые должны быть отклонены, а вместо этого продолжают двигаться вдоль главной дорожки, или наоборот, особенно когда несколько транспортирующих устройств достигают места отклонения последовательно. Кроме того, в случае возврата, столкновение с транспортирующим устройством, возвращающимся со вспомогательной дорожки, и, таким образом, блокировка движения транспортирующих устройств становятся неизбежными.
Это, конечно, недопустимо в системе для транспортировки биологических образцов, которая, как предполагается, должна быть полностью автоматизированной и способной работать также в ночное время, без необходимости надзора любым техническим персоналом.
Патент США 5941366 раскрывает многодорожечную транспортирующую систему контейнеров с пробирками, со средством, приспособленным для отклонения упомянутых контейнеров с одной дорожки на другую.
Целью настоящего изобретения является ускорение как этапа считывания и впоследствии адресации каждого отдельного транспортирующего устройства вдоль соответствующей дорожки, так и возвращения ранее отклоненных транспортирующих устройств со вспомогательной дорожки на главную дорожку, тем самым значительно увеличивая частоту их продвижения в пределах каждой отдельной технологической установки и, как следствие, вдоль всей автоматизированной системы.
Все это должно быть достигнуто, не вызывая никакой очереди с ожиданием или блокировки движения транспортирующих устройств.
Другой целью является обеспечение безошибочной адресации на этапе отклонения, даже если значительное количество транспортирующих устройств по очереди прибывает близко к месту отклонения.
Дополнительной целью является предотвращение потенциальных столкновений между возвращающимися транспортирующими устройствами и теми, что перемещаются по главной дорожке.
Эти и другие цели достигаются технологической установкой устройств для транспортировки контейнеров биологического препарата, как описано в п.1 формулы изобретения.
Эти и другие признаки настоящего изобретения станут более очевидными из последующего подробного описания варианта его осуществления в виде неограничивающего примера со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 представляет общий вид основной технологической установки, принадлежащей автоматическому конвейеру лабораторной автоматизированной системы, со снятым блоком управления;
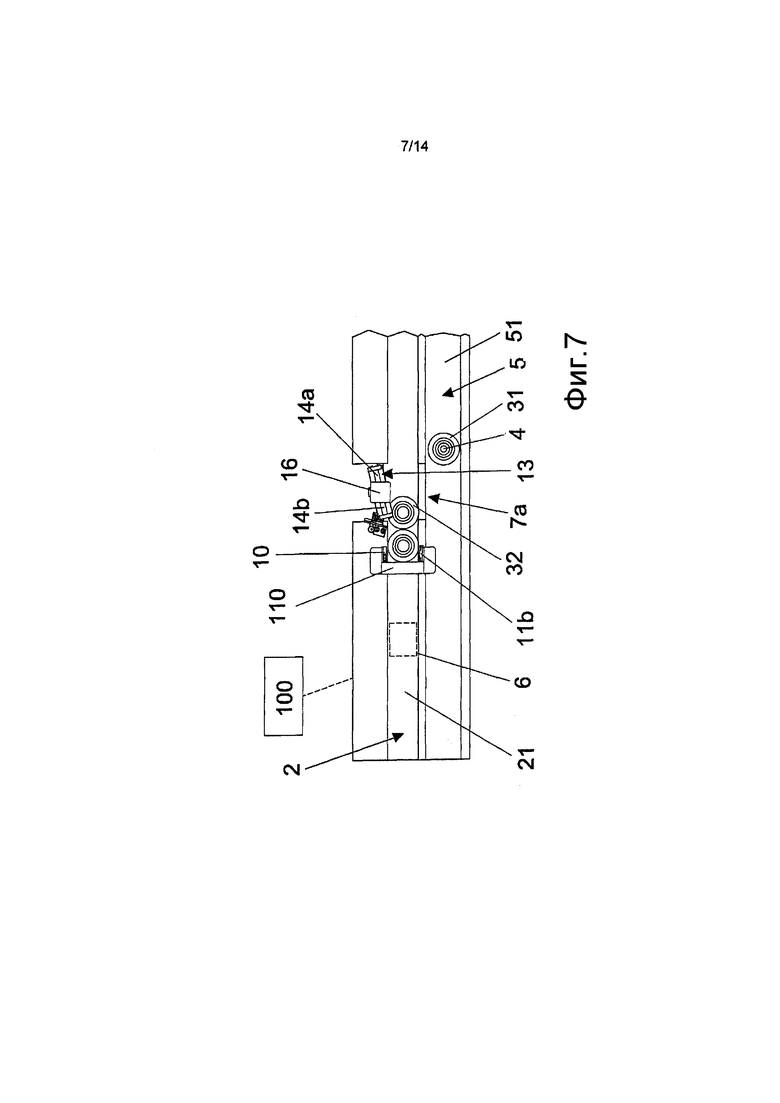
Фиг. 2-7 представляют вид сверху различных операционных этапов отклоняющего узла;
Фиг. 8 представляет снова подробный чертеж вида сверху отклоняющего узла, в аварийной ситуации, в которой транспортирующие устройства заблокированы;
Фиг. 9 представляет подробный чертеж детали, представленной на фиг. 8 в двух различных операционных этапах;
Фиг. 10 представляет в подробностях операционный этап части отклоняющего узла, зацепленного с транспортирующим устройством;
Фиг. 11 представляет вид сверху первого операционного этапа возвращающего узла с транспортирующим устройством, приходящим со вспомогательной дорожки, на этапе введения в соединительную полосу;
Фиг. 12 представляет, снова, вид сверху в подробностях этапа, в котором транспортирующее устройство возвращается со вспомогательной дорожки на главную дорожку;
Фиг. 13 представляет в подробностях возвращающий узел и транспортирующее устройство, зацепленное с ним;
Фиг. 14 представляет блок-схему, которая объясняет различные этапы способа, связанного с работой отклоняющего узла;
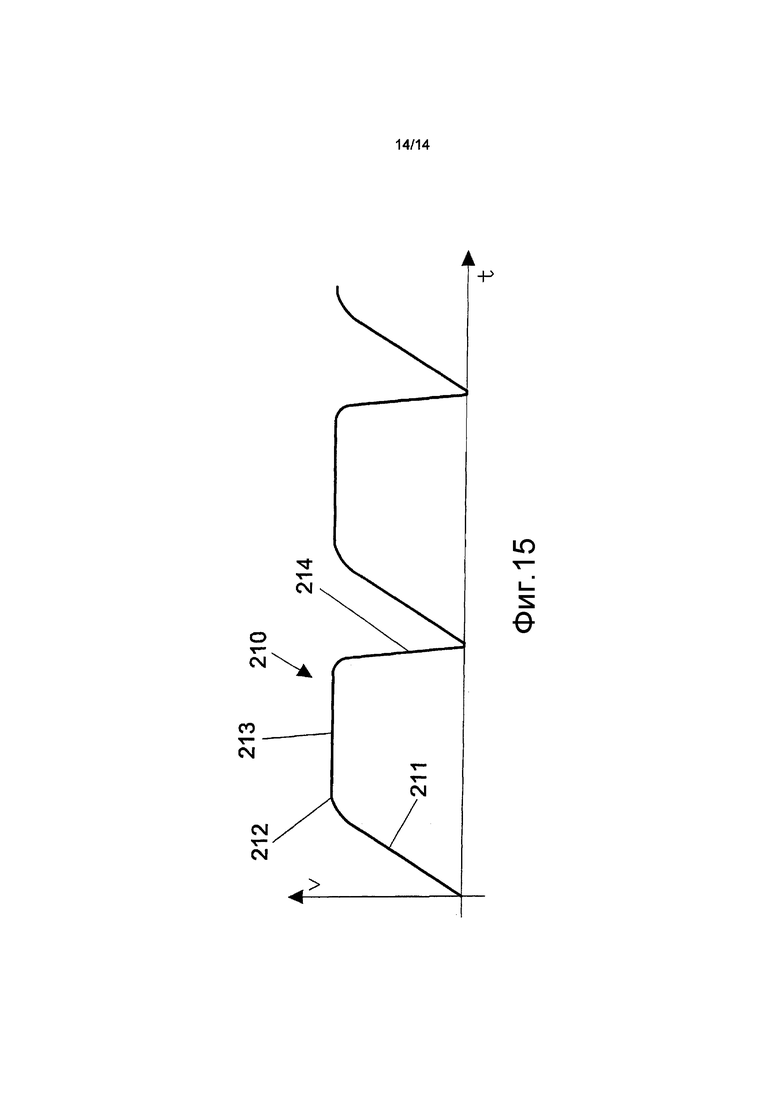
Фиг. 15 представляет скоростную временную диаграмму скорости кулачка и, таким образом, профиля ускорения, которая периодически повторяется для каждого одинакового срабатывания.
Система автоматической идентификации, транспортировки и адресации образцов биологического материала ("автоматизированная система") состоит из ряда технологических установок 1, как представлено на фиг. 1, собранных вместе в переменном количестве и в соответствии с различными конфигурациями для удовлетворения различных потребностей испытательных лабораторий, которые используют настоящее изобретение.
Система, и, соответственно, каждая отдельная установка 1 содержит главные транспортирующие дорожки 2, выполняющие функции:
- транспортировки устройств 3 (т.е. устройств, приспособленных для транспортировки контейнеров биологического препарата, как описано в международной патентной заявке W0-2008043394 заявителя), транспортирующих эти контейнеры 4 биологического препарата, например, пробирки, или пустых транспортирующих устройств, которые должны быть заполнены пробирками;
- адресации упомянутых транспортирующих устройств 3 по мере необходимости к вспомогательным транспортирующим дорожкам 5, параллельным главным дорожкам 2 и расположенным снаружи по отношению к ним, которые позволяют этим транспортирующим устройствам 3 достигнуть предварительного тестирования, тестирования (или анализатора, приборов, приспособленных для проведения испытаний на образцах биологических материалов) или модулей посттестирования или участков, расположенных рядом со вспомогательной дорожкой. Однако, поскольку эти модули не являются объектом настоящего изобретения, они не будут описываться, а только указываться в целях обеспечения более четкого пояснения транспортирующей системы.
Взаимно параллельные главная 2 и вспомогательная 5 дорожки вмешают горизонтально расположенные снабженные приводом конвейерные ленты 21, 51, выполняющие функцию транспортировки транспортирующих устройств 3. Каждый модуль имеет пару лент 21, 51, бегущих в одном направлении, и пару лент 21, 51, бегущих в противоположном направлении, с функцией пары направленных наружу дорожек и пары возвращающих дорожек. Фигуры представляют только одну из этих двух пар лент 21, 51.
Для структурной детализации каждой отдельной технологической установки и, таким образом, расширения системы в целом должна быть сделана ссылка на описание, представленное в патенте ЕР-2225567 заявителя.
Соединительные полосы 7а и 7b предусмотрены между вспомогательной и главной дорожками 5, 2, которые могут не рассматриваться в качестве действующих дорожек, даже хотя они существуют, и они представляют собой места, в которых транспортировочные устройства 3 перемещаются с главной дорожки 2 на вспомогательную дорожку 5 или, наоборот, в соответствии со способами, которые будут лучше объяснены в дальнейшем.
Отклоняющий узел 20, который предусмотрен в положении под поверхностью снабженных приводом конвейерных лент 21, 51 и расположен выше по ходу от соединительной полосы 7а, содержит идентификационные и управляющие средства 6 транспортирующих устройств (фиг. 2). Они преимущественно основаны на технологии радиочастотной идентификации и содержат антенну, способную обнаруживать прохождение каждого транспортирующего устройства 3 посредством связи с приемопередатчиком, содержащимся внутри самого транспортирующего устройства 3.
Антенна 6, в свою очередь, электрически соединена с двумя датчиками обнаружения, установленными сбоку в отношении главной дорожки 2: в частности, они являются датчиком 10 обнаружения пробирки и датчиком обнаружения транспортирующего устройства, состоящими из излучателя 11а и приемника 11b. Датчик 10 обнаружения пробирки совмещен с излучателем 11а, т.е. расположен на нем.
Датчик, состоящий из двух частей 11a и 11b, обращенных друг к другу на противоположных сторонах главной дорожки 2 и электрически соединенных друг с другом перемычкой 110, в свою очередь, синхронизирован с отклоняющим устройством 13, преимущественно кулачком, вращающимся вокруг центрального вала 15 электрического двигателя 16 (фиг. 10). Кулачок 13 снабжен фасонным профилем, что позволяет ему одновременно воздействовать на кольцевой выступ 33 и корпус 34 транспортирующего устройства 3, как это будет лучше объяснено ниже.
На стороне главной дорожки 2, предпочтительно вдоль той же стороны, на которой предусмотрены датчик 10 и излучатель 11а, останавливающий затвор 23 может выходить в специальных аварийных ситуациях, которые блокируют движение транспортирующих устройств 3 (фиг. 8 и 9).
Кроме того, предусмотрен блок 100 управления для всей автоматизированной системы, изображенный для удобства в связи только с технологической установкой 1 (фиг. 2) и способный поддерживать связь с технологической установкой 1, таким образом корректируя множество операций устройств, принадлежащих к установке 1, сам участвуя в них.
Блок 100 управления может быть прикладным программным обеспечением, установленным на персональном компьютере, снабженном памятью, содержащей всю информацию, необходимую для выполнения правильных действий с пробирками 4, и приспособленным для запоминания их жизненного цикла во время технологического процесса. Информация, относящаяся к пробирке, включает в себя, например, персональные данные индивидуума, у которого был собран биологический материал, тесты, которые должны быть выполнены на таком биологическом материале, а в некоторых случаях - уровень срочности, в течение которого пробирка должна быть обработана.
Блок 100 управления поэтому управляет соответствующей адресацией транспортирующих устройств 3, содержащих пробирки 4 вдоль технологической установки 1 и, соответственно, вдоль всей автоматизированной системы; конечно, он в равной степени управляет адресацией пустых транспортирующих устройств 3, не содержащих пробирки. С этой целью, на фиг. 2-7 в качестве примера первое из транспортирующих устройств 31 в очереди рядом с отклоняющим узлом 20 содержит пробирку 4, в то время как остальные являются пустыми.
Все устройства, установленные на системе, подключены к блоку 100 управления так, чтобы взаимодействовать с ним, принимая команды в реальном времени.
С другой стороны, что касается возвращающего узла 30, на внешней стороне соединительной полосы 7b он содержит вертикально расположенный, предпочтительно эластичный ремень 9, в зацеплении с двумя шестернями 8a и 8b с вертикальной осью вращения (фиг. 13). Вал 22 с вертикальной осью вращения приводится во вращение электрическим двигателем 19, передающим свое вращательное движение на шестерню 8b, которая, в свою очередь, приводит в действие ремень 9.
Три различных транспортирующих устройства 35, 36 и 37 приведены на фиг. 11 и 12 для лучшей иллюстрации движения этих транспортирующих устройств вдоль возвращающего узла 30, как это станет более очевидно ниже.
Транспортирующее устройство 35 содержит наружную боковую цилиндрическую поверхность 350, приспособленную для взаимодействия с ремнем 9, более детально, вертикально расположенной плоской опорной поверхностью 91 (фиг. 13).
Операция заключается в следующем: множество транспортирующих устройств 3, содержащих или не содержащих пробирки 4 и приходящих с предшествующих технологических установок, подключенных выше по ходу от установки 1, перемещаются на конвейерной ленте 21 в промежутке главной дорожки 2 до соединительной полосы 7а. Представленный вариант осуществления (фиг. 2-7) показывает последовательность транспортирующих устройств 3, перемещающихся по существу близко одно за другим, в заявленном промежутке главной дорожки 2. Для удобства, первые два транспортирующих устройства из этих транспортирующих устройств пронумерованы ссылочными позициями 31 и 32.
Для каждого единичного транспортирующего устройства, однажды достигшего участка конвейерной ленты с антенной 6 (фиг. 2) под ней, уникальный идентификатор самого транспортирующего устройства обнаруживается самой антенной 6 через связь с приемопередатчиком, содержащимся в транспортирующем устройстве, и положение транспортирующего устройства вдоль технологической установки 1 в этот самый момент является, таким образом, ассоциированным с ней. На фиг. 2 это представлено со ссылкой на первое транспортирующее устройство 31 в последовательности.
Поскольку блок 100 управления уже имеет информацию, связанную с ассоциацией между каждым транспортирующим устройством 3 и связанной пробиркой 4 (если присутствует), он также имеет информацию, связанную с тем, должно или нет поступающее транспортирующее устройство 3 быть отклонено на вспомогательную дорожку 5. Эта информация является уже переданной заранее на панель управления всей технологической установкой 1 и, следовательно, к интеллектуальному устройству панели управления антенной 6, в качестве фактического перечня, содержащего транспортирующие устройства 3, которые, однажды достигнув близко соединительной полосы 7а, должны быть отклонены.
Такой перечень может также динамично обновляться в соответствии с изменяющимися адресными потребностями транспортирующих устройств 3, характерными для лабораторной автоматизированной системы.
Таким образом, достижение транспортирующим устройством 31 антенны 6 (фиг. 2) активирует соответствующую связь с датчиками 10, 11а и 11b, установленными сбоку относительно конвейерной ленты 21, в непосредственной близости к соединительной полосе 7а и электрически соединенными с антенной платой.
На практике, антенна 6 предназначена для обнаружения идентификатора поступающего транспортирующего устройства 31, распознавания его, сравнения его с перечнем, который имеется в панели управления ею (содержащим путь, которым каждое транспортирующее устройство должно следовать) и, таким образом, оповещения датчиков 10 , 11а и 11b о предстоящем поступлении транспортирующего устройства, которое должно быть отклонено или нет.
Расположение антенны 6, которая в известной мере на конвейерной ленте предшествует датчикам 10, 11а и 11b, задумано на основе внутренней способности антенны 6 мгновенно считывать и идентифицировать транспортирующее устройство 31, обусловленное своей панелью управления, без необходимости его остановки.
И, наоборот, это невозможно в известных решениях: для того чтобы произвести идентификацию, антенна нуждается в том, чтобы транспортирующее устройство было неподвижным, таким образом, оно блокируется останавливающим затвором, его идентификатор обнаруживается связью между антенной и приемопередатчиком транспортирующего устройства, и только после этого затвор перемещается назад и разблокирует транспортирующее устройство, поступающее далее для отклонения или нет, в соответствии с информацией, поступающей от блока управления.
И, наоборот, в заявленном решении, использующем способность антенны 6 считывать транспортирующие устройства без их остановки, это считывание осуществляется заблаговременно вдоль ленты (фиг. 2), так что, как только транспортирующее устройство 31 достигает датчиков (фиг. 3), последние, безусловно, уже готовы к поступлению транспортирующего устройства 31, которое должно быть отклонено или нет, и, таким образом, уже подготовлены для включения или нет кулачка 13.
Таким образом, возможно подумать о промежутке ленты, содержащемся между антенной 6 и датчиками в качестве своего рода запаса прочности, для того чтобы во время перемещения транспортирующего устройства 31 в этом промежутке связь между панелью управления антенны 6 и датчиками 10, 11а и 11b, безусловно, имела место.
Соответственно, чисто теоретически и в соответствии с разумно минимальным и максимальным пределами расстояния, длина этого промежутка может быть сокращена, по желанию, в соответствии с величиной скорости этой электрически управляемой связи, рассчитанной с точки зрения производительности.
Транспортирующее устройство 31, однажды прошедшее мимо антенны 6, затем достигает датчиков, расположенных по сторонам ленты 21. Конечно, целый ряд транспортирующих устройств движется вперед, т.е. в быстрой последовательности второе транспортирующее устройство 32 считывается и идентифицируется антенной 6 и т.д. для каждого транспортирующего устройства из других последующих транспортирующих устройств.
Возвращаясь к анализу различных этапов перемещения первого транспортирующего устройства 31, оно затем достигает датчика 10 обнаружения пробирки и пары датчиков обнаружения транспортирующего устройства, образованных излучателем 11а - приемником 11b (фиг. 3). Предпочтительно, датчик 10 находится в положении выше, над излучателем 11а (по этой причине на фиг. 2-8 на виде сверху излучатель 11а скрыт датчиком 10); таким образом, обнаружение пробирки, если она присутствует, осуществляемое датчиком 10, происходит в то же самое время, что и обнаружение транспортирующего устройства с помощью датчика, образованного парой 11а-11b, окно считывания датчика 10 более узкое, чем у пары 11а-11b и, таким образом, содержится внутри последнего. Тем не менее, датчик 10 обнаружения пробирки служит только в качестве датчика подтверждения, выполненного с возможностью обнаружения, присутствует или отсутствует заданная пробирка в транспортирующем устройстве 31, согласно тому, что ожидалось на основании обнаружения идентификатора транспортирующего устройства 31, проведенного антенной 6, и по информации о каждом транспортирующем пробирку устройстве (или информации о пустом транспортирующем устройстве), уже содержащейся в блоке 100 управления и предварительно переданной сначала к панели управления всей технологической установкой 1 и, отсюда, к панели управления антенной 6.
И наоборот, датчик обнаружения транспортирующего устройства фактически синхронизирован с электрическим двигателем 16, который приводит в действие кулачок 13. В действительности, независимо от наличия или отсутствия пробирки 4, каждое транспортирующее устройство 3 может быть отклонено или нет в соответствии с информацией, предварительно переданной блоком 100 управления, и, конечно, четыре различных случая могут иметь место: т.е. отклонение транспортирующего устройства с пробиркой, отклонение транспортирующего устройства без пробирки, не отклонение транспортирующего устройства с пробиркой, не отклонение транспортирующего устройства без пробирки.
Это зависит от адресных потребностей, установленных заранее блоком 100 управления, единичного транспортирующего устройства 3.
В соответствии с этим, если транспортирующее устройство не должно быть отклонено, однажды считанное датчиком обнаружения транспортирующего устройства, образованного излучателем 11а и приемником 11b, оно продолжает движение прямо, без приведения в действие кулачка 13. С другой стороны, если предположить, что необходимо отклонить транспортирующее устройство 31 вдоль вспомогательной дорожки 5, как только его прохождение обнаруживается парой излучатель-приемник (фиг. 3), синхронизм, характеризующий отклоняющий узел 20 и который зависит от интеллектуальной панели управления антенной 6, посредством электрического двигателя 16 начинается вращение центрального вала 15 и кулачка 13 с ним, которые, следовательно, воздействуют на транспортирующее устройство 31 (фиг. 4).
В частности, на этапе контактирования с транспортирующим устройством 31 кулачок 13, в силу своего профиля, который шире в верхней части и уже в нижней части (фиг. 10), сталкивается как с кольцевым выступом 33, так и с корпусом 34 транспортирующего устройства 31, обеспечивая равномерное толкание транспортирующего устройства 31 и менее резкое передвижение по сравнению с известными отклоняющими системами.
Кроме того, электрический двигатель 16 прилагает к кулачку 13 движение, которое отличается определенным профилем 210 скорости, электронно-управляемым («электронному кулачку") и представленным на фиг. 15. Он имеет начальную увеличивающуюся скорость (и постоянное ускорение) на этапе 211, соответствующем начальному этапу столкновения кулачка 13 с транспортирующим устройством 31, для достижения максимальной пиковой скорости 212 в тот момент, когда кулачок 13 уже освобождает транспортирующее устройство 31, для его отклонения; следовательно, дальше кулачок продолжает свое движение с постоянной скоростью 213 (и, таким образом, нулевым ускорением), чтобы, наконец, подвергнуться замедлению (участок 214) и вернуться в свое исходное положение готовности.
Конечно, за счет изменяющейся скорости кулачка 13 и очень короткой продолжительности столкновения между транспортирующим устройством 31 и кулачком 13 (порядка миллисекунд) изменения скорости кулачка почти невидимы невооруженным глазом.
Фиг. 5 представляет этап, на котором транспортирующее устройство 31 пересекает соединительную полосу 7а и проталкивается кулачком 13, который достиг пика своей максимальной скорости 212, перемещаясь от главной дорожки 2 к вспомогательной дорожке 5, в то время как следующая фиг. 6 представляет этап, в котором кулачок 13 уже освободил транспортирующее устройство 31, к этому времени отклоненное и продолжающее свое передвижение вдоль вспомогательной дорожки 5, а затем возвращается к своему исходному положению готовности, замедляясь на конечном этапе. Между тем, следующие транспортирующие устройства в последовательности следуют по пути вдоль антенны 6 и датчиков 10, 11а и 11b, уже описанному со ссылкой на транспортирующее устройство 31, и когда последнее было освобождено, кулачок 13, поскольку вернулся к положению готовности, является уже готовым для взаимодействия со следующим транспортирующим устройством 32 и, дополнительно, для отклонения, по необходимости.
В действительности, каждый раз, когда кулачок приводится в действие для отклонения транспортирующего устройства, он выполняет вращение на 180 градусов вокруг своей оси, представленной валом 15, и это позволяет управлять возможным поступлением последовательности транспортирующих устройств близко друг к другу, все для отклонения (фиг. 15, профиля периодической скорости кулачка), так как два противоположных конца 14a и 14b кулачка 13 попеременно оказывают толкание транспортирующих устройств. Как следствие этого, следующее транспортирующее устройство 32, которое в показанном варианте осуществления предполагается быть отклоненным тоже, проталкивается на вспомогательную дорожку 5 концом 14b кулачка 13 (фиг. 7), который по отношению к центральной оси 15 является противоположным концу 14а, который ранее отклонял транспортирующее устройство 31 (фиг. 4-6).
С другой стороны, если одно из следующих транспортирующих устройств не должно быть отклонено (решение, которое не показано на чертежах) как и прежде, эта команда (первоначально поступающая от блока 100 управления) передается посредством антенны 6 к датчикам 10, 11А и 11b, и в силу синхронизма между парой 11а и 11b и электрическим двигателем 16 кулачка 13, когда такое транспортирующее устройство достигает вышеприведенной пары, вращение кулачка 13 не приводится в действие, так что транспортирующее устройство может продолжать движение прямо вдоль главной дорожки 2.
Таким образом, вся система выдерживает высокую частоту поступления транспортирующих устройств 3, в соответствии с тем обстоятельством, что они быстро считываются антенной 6, без длительной остановки, как описано выше. Соответственно, работа всего отклоняющего узла 20 и, в целом, движение транспортирующих устройств 3 значительно ускоряется. Очевидно также, что если в некоторые моменты частота поступления транспортирующих устройств, близких к отклоняющему узлу 20, не так высока (транспортирующие устройства больше не находятся одно за другим), вращательное движение кулачка 13 в любом случае останавливается после того, как обработанное транспортирующее устройство было отклонено, и только тогда, когда датчик обнаружения транспортирующего устройства, т.е. пара, образованная излучателем 11а и приемником 11b, обнаруживает поступление следующего транспортирующего устройства, оно начинается снова, конечно, при условии, что новое поступающее транспортирующее устройство должно быть отклонено на вспомогательную дорожку 5.
В случаях, описанных выше, в которых отклонения транспортирующих устройств не являются последовательными, диаграмма на фиг. 15, очевидно, имеет более широкий участок с нулевой скоростью между одним профилем 210 и следующим.
Дополнительно предусмотрена процедура для осуществления в случае крайней необходимости, в случае различных проблем ниже по ходу от места отклонения или в любом случае или любом другом месте автоматизированной системы, которая требует установки блокировки движения транспортирующих устройств 3 в отклоняющем узле 20, для того чтобы возникшая проблема могла быть решена, а затем транспортирующие устройства 3 могли вернуться к нормальному движению.
Такая аварийная процедура является вновь предусмотренной платой управления антенной 6, которая способна распознавать возникновение проблемы или, во всяком случае, непредвиденной ситуации, которая требует решения с операций технического обслуживания на установке 1 и временной блокировки движения транспортирующих устройств 3. Это происходит путем управления выпуском останавливающего затвора 23 на стороне главной дорожки 2 (фиг. 8), а также выключения электрического двигателя 16, который приводит в действие кулачок 13. Очевидно, что на этом этапе синхронизм между кулачком 13 и датчиком обнаружения транспортирующего устройства, который занят первым транспортирующим устройством из возможной последовательности, временно блокирует отказавшие транспортирующие устройства 3, хотя бы временно.
В то же время панель управления антенной 6 предупреждает панель управления технологической установкой 1 (и, следовательно, информация затем передается в блок 100 управления) о возникновении аварийной ситуации, которая требует выпуска останавливающего затвора 23. Устройство 100 управления затем выполняет задачу, в некоторых случаях, управления блокировкой движения транспортирующих устройств также и в других точках автоматизированной системы (например, в технологических установках выше по ходу от установки 1) для предотвращения формирования слишком длинной очереди транспортирующих устройств в отклоняющий узел 20 технологической установки 1.
Фиг.9 представляет более подробно два различных положения, принимаемые останавливающим затвором 23, которые полностью аналогичны описанным в патенте ЕР-2225567 заявителя. В частности, положение готовности (или "открыто") показано слева, где затвор 23 позволяет движение транспортирующего устройства 3, в то время как "закрытое" положение принимается останавливающим затвором 23 после поворота против часовой стрелки для блокировки транспортирующего устройства 3, как показано справа.
После того как вышеприведенная ненормальная ситуация была решена, панель управления антенной 6 управляет возвращением останавливающего затвора 23 (по направлению часовой стрелки, и, таким образом, возвращением к «открытой» конфигурации) и одновременного перезапускает двигатель 16 и синхронизм между датчиком обнаружения транспортирующего устройства и кулачком 13, так что транспортирующие устройства 3, теперь снова свободные для движения вдоль ленты 21, могут быть вновь отклонены или нет в зависимости от необходимости.
Транспортирующие устройства 3, в некоторых случаях отклоненные на вспомогательную дорожку 5, вследствие этого движутся по снабженной приводом конвейерной ленте 51 и, как только сопрягаются с заданным (предварительного тестирования, тестирования или посттестирования) модулем в конце вспомогательной дорожки 5, они должны возвращаться вдоль главной дорожки 2. Здесь начинает действовать возвращающий узел 30. В известных решениях, возвращение управляется посредством системы датчиков, на основе которых прохождение транспортирующего устройства 3 обнаруживается, как правило, в конце вспомогательной дорожки 5, и останавливающий затвор приводится в действие, при обнаружении этого, на главной дорожке 2, также в положении, близком к соединительной полосе 7b, содержащей переключатель, который, вращаясь, выступает на боковой стенке главной дорожки 2 и блокирует любые транспортирующие устройства 3, движущиеся мимо, позволяя возвращению транспортирующих устройств 3 со вспомогательной дорожки 5.
И наоборот, решение, предложенное в настоящем патенте, заключается в устранении любой системы датчиков и останавливающих затворов для управления возвращением транспортирующих устройств 3.
В самом деле, транспортирующее устройство 35 (фиг. 11), прибывшее в конец вспомогательной дорожки 5, достигает соединительной полосы 7b; здесь, боковая поверхность 350 транспортирующего устройства 35 встречает ремень 9, приводимый в действие, как упомянуто, системой, управляемой электрическим двигателем 19 и содержащей вал 22 и шестерни 8а и 8b (фиг. 13).
Конечно, вращение ремня 9 идет в желаемом направлении, обратном движению транспортирующего устройства 35 (в настоящем варианте осуществления - это направление по часовой стрелке), и транспортирующее устройство 35, таким образом, протягивается простым трением вдоль соединительной полосы 7b: по существу, тяга горизонтально расположенной конвейерной ленты 51 вспомогательной дорожки 5, расположенной под транспортирующим устройством 35, добавляется к тяге ремня 9, имеющего вертикально расположенную поверхность 91, которая взаимодействует с боковой поверхностью 350 транспортирующего устройства 35. Таким образом, транспортирующее устройство 35 начинает вращаться в течение этого протягивания (фиг. 11), затем поступает (фиг. 12) на главную дорожку 2 между двумя последовательными транспортирующими устройствами 36 и 37, которые сами перемещаются, необязательно, близко друг к другу, вдоль главной дорожки 2. Это происходит потому, что боковая поверхность 350 транспортирующего устройства 35 в направлении против часовой опирается на боковые поверхности 360, 370 транспортирующих устройств 36 и 37 и поворачивается на обоих, это позволяет сдвинуть транспортирующее устройство 36, в то же время, по существу, блокировать транспортирующее устройство 37 и проникнуть перед ним на главную дорожку 2.
Транспортирующее устройство 35 вращается в направлении против часовой стрелки вокруг своей вертикальной оси симметрии, обусловленном движением по часовой стрелке ремня 9, и при контакте он вызывает вращение в противоположном направлении устройства 36 и, прежде всего, устройства 37, которое на самом деле движется по расположенной под ним конвейерной ленте 21, вращающимся в направлении по часовой стрелке (противоположном направлению вращения устройства 35) без поступательного перемещения, а скорее перемещается само устройством 35 немного назад. Взаимодействие транспортирующего устройства 35 вызывает незначительное вращение по часовой стрелке и, прежде всего, дополнительно толкает вперед устройство 36. Соответственно, зазор между устройствами 36 и 37 создается для помещения устройства 35, и любой риск помехи между возвращающимся устройством 35 и устройствами 36 и 37, перемещающимся вдоль главной дорожки 2, предотвращается.
Следует отметить, что если в течение определенного времени модуль предварительного тестирования, тестирования или посттестирования, присутствующий вдоль вспомогательной дорожки 5, не освобождает любое ранее отклоненное транспортирующее устройство, и, таким образом, нет необходимости возвращать любое из них вдоль главной дорожки 2, электрический двигатель 19, который управляет вращением ремня 9, может быть временно выключен по соображениям экономии энергии, и ремень, конечно, будет временно заблокирован.
Когда модуль освобождает транспортирующее устройство снова, в то же время электрический двигатель 19 перезапускается и вращение ремня 9 возобновляется.
Способ 200, связанный с последующими оперативными этапами только отклоняющего устройства 20 технологической установки 1, при отсутствии проблем или аномальных и неожиданных ситуаций, описан на фиг. 14.
Во-первых, этап 201 относится к сообщению, посредством блока 100 управления, панели управления антенной 6, через панель управления технологической установкой 1, перечня, содержащего перечень транспортирующих устройств, среди тех, которые взаимодействуют с технологической установкой 1, которые должны быть отклонены.
После этого, на этапе 202, идентификатор первого транспортирующего устройства 31, подошедшего к антенне 6, считывается самой антенной, и на основании факта, что такое транспортирующее устройство принадлежит или нет к вышеприведенному перечню, информация в отношении, подлежит ли транспортирующее устройство 31 отклонению или нет, хранящаяся панелью управления антенной 6 (этап 203), является основанием для последующего приведения в действие синхронизма между датчиком обнаружения транспортирующего устройства и отклоняющим устройством (кулачком) 13.
Цикл повторяется для каждого близко подошедшего к антенне 6, любого последующего транспортирующего устройства (этап 204), таким образом возвращаясь для любого из них на предыдущие этапы идентификации и хранения информации.
Когда транспортирующее устройство 31 достигает датчика, состоящего из пары излучатель 11а - приемник 11b (этап 205), синхронизм между самим датчиком и кулачком 13 мгновенно активируется (этап 206). Это означает, что на основе ранее сохраненной информации, то есть транспортирующее устройство 31 должно быть отклонено или нет (этап 207), следующим этапом может быть вращение кулачка 13 (этап 208), так что транспортирующее устройство 31 может быть отклонено с главной дорожки 2 на вспомогательную дорожку 5, или не приведение в действие кулачка 13 (этап 209), если транспортирующее устройство должно продолжать движение прямо вдоль главной дорожки 2. Процесс повторяется, в последовательности, для всех транспортирующих устройств, которые взаимодействуют с технологической установкой 1 в месте перед отклонением, независимо от их входной частоты. Новаторский аспект находки, таким образом, определяется тем фактом, что, будучи структурно очень разными, и отклоняющее устройство 20, и возвращающее устройство 30 выполняют функцию, допускающую непрерывное движение транспортирующих устройств 3 по технологической установке 1, исключая характерную необходимость известных систем, требующих остановки этих транспортирующих устройств в каждом месте отклонения с главной дорожки 2 или возвращения на главную дорожку.
Что касается отклоняющего узла 20, это достигается за счет обеспечения, рядом с произвольным местом отклонения, механизма синхронизации между панелью управления антенной, датчиком, который обнаруживает присутствие транспортирующих устройств 3, движущихся вдоль главной дорожки 2, и отклоняющим устройством 13, которое, при необходимости, отклоняет транспортирующие устройства 3; такой механизм синхронизации разработан таким образом, что ни одно из входящих транспортирующих устройств не должно быть остановлено, даже если они прибывают к месту отклонения одно за другим в быстрой последовательности.
Как уже упомянуто, этот аспект связан с наличием выше по ходу от места отклонения антенны 6, которая способна считывать входящие транспортирующие устройства 3 и идентифицировать их без их остановки. В частности, панель управления антенной, которая позволяет это немедленное считывание, представляет собой значительный шаг вперед по сравнению с известными системами, в которых всегда необходимо блокировать транспортирующее устройство 3, чтобы позволить считать его посредством антенны 6 и, следовательно, предусматривать такую же антенну, расположенную перед отклонением, для останавливающего затвора, который выступает от боковой стенки конвейера, для выполнения этой блокирующей функции.
На практике, в то время как в известных системах антенна 6, является по существу частью панели управления всей технологической установкой, напротив, в решении по настоящему патенту она снабжена собственной интеллектуальной панелью управления, которая, будучи соответственно синхронизирована посредством панели управления установкой 1, с блоком 100 управления, а также с датчиками обнаружения 10, 11а и 11b пробирки и транспортирующих устройств, позволяет всему процессу отклонения транспортирующих устройств 3, вдоль технологической установки 1, быть управляемым.
В любом случае останавливающий затвор предусмотрен на отклоняющем узле 20, но его функция теперь заключается только в том, чтобы блокировать транспортирующие устройства, в частности, при чрезвычайных ситуациях, поэтому он не начинает действовать при нормальном режиме работы самого отклоняющего узла, как это происходит в известных решениях.
Еще одним новаторским аспектом является размещение такой антенны 6 под конвейерной лентой 21 главной дорожки 2 на заранее определенном промежутке в отношении датчиков 10, 11а и 11b, т.е. в месте непосредственно перед отклонением, в то время как в известных системах антенна 6 располагается на датчике обнаружения пробирки (одном-единственном), и, таким образом, в месте непосредственно перед отклонением, так что одновременно идентификатор транспортирующего устройства 3 обнаруживается антенной 6 и пробирка 4 (если предусмотрена) обнаруживается датчиком, но все с неподвижным транспортирующим устройством 3 и, следовательно, со значительным замедлением.
Кроме того, использование кулачка, подобно описанному выше, в качестве отклоняющего устройства 13 обеспечивает более равномерное толкание транспортирующего устройства 3, сопровождающее его плавно, по сравнению с известными отклоняющими устройствами.
Прежде всего, обеспечение двигателем, позволяющим электрически управлять скоростным профилем кулачка, представляет собой высоко инновационную концепцию, по сравнению с известной системой, где увеличение толкания, производимого кулачком к транспортирующему устройству, является лишь результатом определенной геометрической формы самого кулачка (например, винтовой формы, чтобы придать более сильное толкание в более тонкой конечной его части).
Кроме того, путем поворота на 180 градусов за один раз кулачок 13 способен лучше выдерживать высокую частоту движения транспортирующих устройств 3 для отклонения одного за другим, по сравнению с известными отклоняющими устройствами, по большей части основанными на рычаге, который является пневматическим приводом, и который, таким образом, открываясь и закрываясь непрерывно, часто не способен выдерживать возможный поток транспортирующих устройств 3, близких друг к другу, и все для отклонения.
На практике это было видно, что система, описываемая таким образом, может достигать установленных задач, гарантирующих ускорение, идентификацию и дополнительный процесс отклонения транспортирующих устройств 3 с основной дорожки 2 на вспомогательную дорожку 5 внутри установки 1 автоматического конвейера лабораторной автоматизированной системы, предотвращая блокировку движения транспортирующих устройств на этом этапе. Кроме того, аналогичным образом, блокировка движения также предотвращается на последующем этапе возвращения ранее отклоненных транспортирующих устройств 3, которые возвращаются на главную дорожку 2, без риска создания помех тем устройствам, которые продолжают свое перемещение вдоль главной дорожки 2, так как они не отклонялись.
Это особенно справедливо на обоих этапах в ситуациях, когда частота транспортирующих устройств, которые взаимодействуют с отклоняющим и/или возвращающим узлом, является особенно высокой.
Если касаться множества технологических установок 1 в последовательности, которая формирует автоматический конвейер в целом, это приводит к общему ускорению в движении транспортирующих устройств 3 вдоль всей автоматизированной системы.
Отдельные изменения и отклонения, которые могут быть произведены к изобретению, таким образом, задуманному, все подпадают под объем настоящего изобретения.
На практике, используемые материалы, а также формы и размеры могут быть любыми в соответствии с требованиями.












Изобретение относится к автоматическому конвейеру лабораторной автоматизированной системы для транспортировки контейнеров биологического препарата, например, пробирок. Описана технологическая установка (1) устройств (3, 31, 32, 35-37) для транспортировки контейнеров (4) биологического препарата, содержащая главную дорожку (2) для движения упомянутых транспортирующих устройств (3, 31, 32, 35-37) и вспомогательную дорожку (5) для движения упомянутых транспортирующих устройств (3, 31, 32, 35-37), соединенные друг с другом посредством соединительных полос (7а, 7b).
Упомянутая технологическая установка (1) содержит отклоняющий узел (20) упомянутых транспортирующих устройств (3, 31, 32) с упомянутой главной дорожки (2) на упомянутую вспомогательную дорожку (5) и возвращающий узел (30) упомянутых транспортирующих устройств (3, 35-37) с упомянутой вспомогательной дорожки (5) на упомянутую главную дорожку (2), при этом упомянутые отклоняющий (20) и возвращающий (30) узлы снабжены средством (6, 9, 10, 11а, 11b, 13), выполненным с возможностью обеспечения непрерывного движения без остановки упомянутых транспортирующих устройств (3, 31, 32, 35-37) между упомянутой главной дорожкой (2) и упомянутой вспомогательной дорожкой (5). Целью изобретения является ускорение, идентификация и непрерывный процесс отклонения транспортирующих устройств с одной дорожки на другую внутри установки. 2 н. и 6 з.п. ф-лы, 15 ил.
1. Технологическая установка (1) устройств (3, 31, 32, 35-37) для транспортировки контейнеров (4) для биологического препарата, содержащая главную дорожку (2) для движения упомянутых транспортирующих устройств (3, 31, 32, 35-37) и вспомогательную дорожку (5) для движения упомянутых транспортирующих устройств (3, 31, 32, 35-37), соединенных друг с другом соединительными полосами (7a, 7b), содержащими отклоняющий узел (20) для упомянутых транспортирующих устройств (3, 31, 32) с упомянутой главной дорожки (2) на упомянутую вспомогательную дорожку (5) и возвращающий узел (30) для упомянутых транспортирующих устройств (3, 35-37) с упомянутой вспомогательной дорожки (5) на главную дорожку (2), отличающаяся тем, что каждый отклоняющий узел (20) и каждый возвращающий узел (30) обеспечены средствами (6, 10, 11а, 11b), выполненными с возможностью обеспечения идентификации, управления и обнаружения упомянутых транспортирующих устройств (3, 31, 32, 35-37) без прерывания их перемещения заблаговременно в отношении срабатывания отклоняющих средств (9, 13) для тех же самых устройств (3, 31, 32, 35-37) с одной дорожки (2, 5) на другую (5, 2), при этом упомянутый отклоняющий узел (20) содержит отклоняющее устройство, содержащее кулачок (13), снабженный двумя боковыми участками (14а, 14b), вращающийся вокруг центральной оси (15), причем каждый из упомянутых двух боковых участков (14а, 14b) выполнен с возможностью воздействовать на одно из упомянутых транспортирующих устройств (3, 31, 32, 35-37), при этом упомянутый возвращающий узел (30) содержит снабженный приводом ремень (9), выполненный с возможностью взаимодействия с внешней боковой цилиндрической поверхностью (350) транспортирующих устройств (3, 31, 32, 35-37) для установления упомянутых транспортирующих устройств (3, 31, 32, 35-37) во вращение вокруг вертикальной оси, не прерывая перемещения упомянутых транспортирующих устройств (3, 31,32, 35-37), движение которых, по этой причине, является непрерывным.
2. Технологическая установка по п. 1, отличающаяся тем, что упомянутый отклоняющий узел (20) содержит расположенное выше по ходу от упомянутой соединительной полосы (7а) и вдоль главной дорожки (2) первое идентификационное и управляющее средство (6) транспортирующих устройств (3, 31, 32), затем средство обнаружения (10, 11а, 11b) упомянутых транспортирующих устройств (3, 31, 32) во время их перемещения по упомянутой главной дорожке (2), при этом средство (6, 10, 11а, 11b) соединено с блоком (100) управления, выполненным с возможностью управления отклоняющим устройством (13) транспортирующих устройств (3, 31, 32), расположенным ниже по ходу от упомянутого средства (6, 10, 11a, 11b) на таком интервале, чтобы обеспечить отклонение упомянутых выбранных транспортирующих устройств (3,31, 32) без остановки их на упомянутой главной дорожке (2).
3. Технологическая установка по п. 1 или 2, отличающаяся тем, что упомянутые два боковых участка (14а, 14b) вращаются вокруг центрального вала (15) электрического двигателя (16) и снабжены фасонным профилем, который позволяет каждому из упомянутых боковых участков (14а, 14b) оказывать воздействие на одно упомянутое транспортирующее устройство (3) время от времени.
4. Технологическая установка по п. 3, отличающаяся тем, что кулачок (13) вращается с переменной скоростью.
5. Технологическая установка по п. 1, отличающаяся тем, что упомянутый возвращающий узел (30) содержит в возвращающей соединительной полосе (7b) транспортирующего устройства (3, 35) снабженный приводом ремень (9).
6. Технологическая установка по п. 5, отличающаяся тем, что снабженный приводом ремень (9) расположен вертикально натянутым между двумя шестернями (8а, 8b) с вертикальной осью вращения и имеет вертикальную плоскую контактную поверхность (91), выполненную с возможностью взаимодействовать с упомянутой внешней боковой цилиндрической поверхностью (350) возвращающегося транспортирующего устройства (3, 35) для установления его во вращение для облегчения возврата при наличии перемещающегося транспортирующего устройства (37) на главной дорожке (2).
7. Способ (200) для отклонения транспортирующих устройств (3, 31, 32, 35-37) контейнеров (4) для биологического препарата между главной дорожкой (2) и вспомогательной дорожкой (5) технологической установки (1), отличающийся тем, что обеспечивают идентификацию, управление и обнаружение упомянутых транспортирующих устройств (3, 31, 32, 35-37), не прерывая их движения, заранее в отношении их отклонения с одной дорожки (2, 5) на другую (5, 2), по-прежнему не прерывая перемещение упомянутых транспортирующих устройств (3, 31, 32, 35-37), в результате чего движение которых является непрерывным,
обеспечивают отклонение транспортирующих устройств (3, 31, 32) контейнеров (4) биологического препарата с главной дорожки (2) на вспомогательную дорожку (5) технологической установки (1), при этом он содержит следующие этапы во временной последовательности:
- сообщение (201) перечня, содержащего перечень транспортирующих устройств (31, 32), которые должны быть отклонены, посредством блока (100) управления панели управления средством (6) идентификации и управления, при этом упомянутый перечень динамично обновляется;
- идентификацию (202) каждого из упомянутых входящих транспортирующих устройств (31, 32) посредством упомянутого средства (6) идентификации и управления;
- хранение (203) информации, связанной с необходимостью отклонения или нет каждого из упомянутых входящих транспортирующих устройств (31, 32), посредством упомянутой панели управления упомянутого средства (6) идентификации и управления;
- приведение в действие (206) средств (10, 11а, 11b) обнаружения упомянутых транспортирующих устройств (31, 32);
- приведение в действие (208) отклоняющего устройства (13), если транспортирующее устройство (31, 32), которое достигло упомянутого средства (10, 11а, 11b) обнаружения упомянутых транспортирующих устройств (31, 32), должно быть отклонено с упомянутой главной дорожки (2) на упомянутую вспомогательную дорожку (5), или блокировку (209) упомянутого отклоняющего устройства (13), если упомянутое транспортирующее устройство (31, 32) должно продолжать движение без отклонения.
8. Способ по п. 7, отличающийся тем, что для возвращения транспортирующего устройства (3, 35) контейнеров (4) биологического препарата со вспомогательной дорожки (5) на главную дорожку (2) технологической установки (1) в нем предусматривают автоматическое приведение в действие для вращения возвращающегося транспортирующего устройства (35) вокруг вертикальной оси в возвращающей соединительной полосе (7b), с упомянутой вспомогательной дорожки (5) на упомянутую главную дорожку (2), где движутся дополнительные транспортирующие устройства (36, 37).
| US 2010300831 A1 02.12.2010 | |||
| US 6056106 A 02.05.2000 | |||
| US 2010012460 A1 21.01.2010 | |||
| US 7681466 B2 23.03.2010 | |||
| Устройство для транспортировки сосудов с жидкостями | 1978 |
|
SU1014789A1 |

