УРОВЕНЬ ТЕХНИКИ
В прошлом перед бурением геологических пластов выполнялись оценка, моделирование и прогнозирование характеристик пласта. Однако фактические характеристики конкретной части пласта обычно остаются неизвестными до достижения данной части пласта буровым долотом. Таким образом, в этих условиях операторы не могут принимать оперативные или упреждающие решения, основанные на предшествующих знаниях фактических характеристик пласта, до момента бурения пласта буровым долотом.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Соответственно, в настоящем документе рассмотрены различные системы и способы визуализации данных управления системой каротажа во время бурения (КВБ).
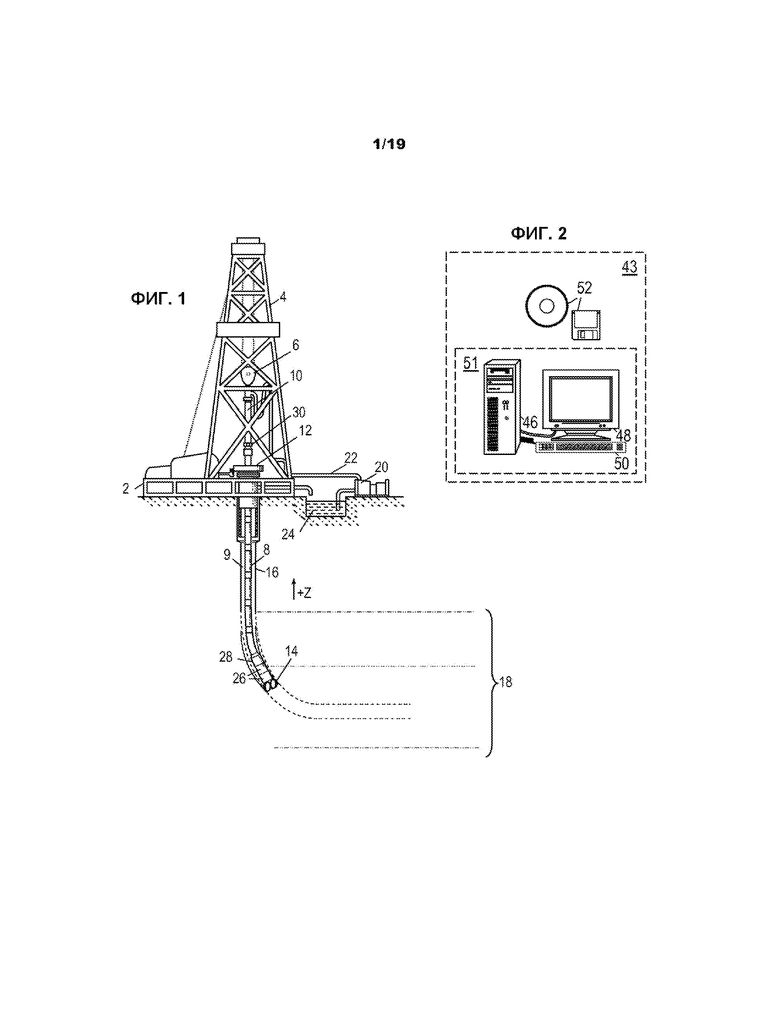
Фиг. 1 иллюстрирует пример структуры, в рамках которой осуществляется каротаж во время бурения (КВБ).
Фиг. 2 иллюстрирует пример компьютерной системы, предназначенной для осуществления операций каротажа, в том числе представления различных вариантов визуализации данных управления.
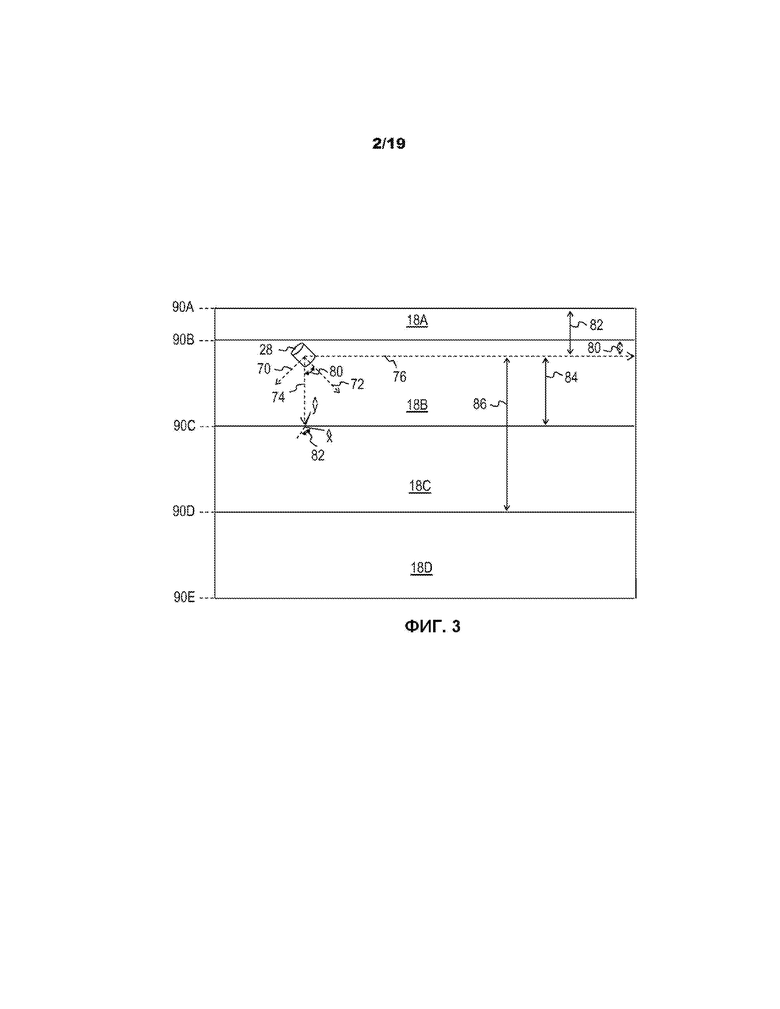
Фиг. 3 иллюстрирует пример устройства КВБ, находящегося в условиях подземной среды, с указанием различных параметров, представляющих интерес.
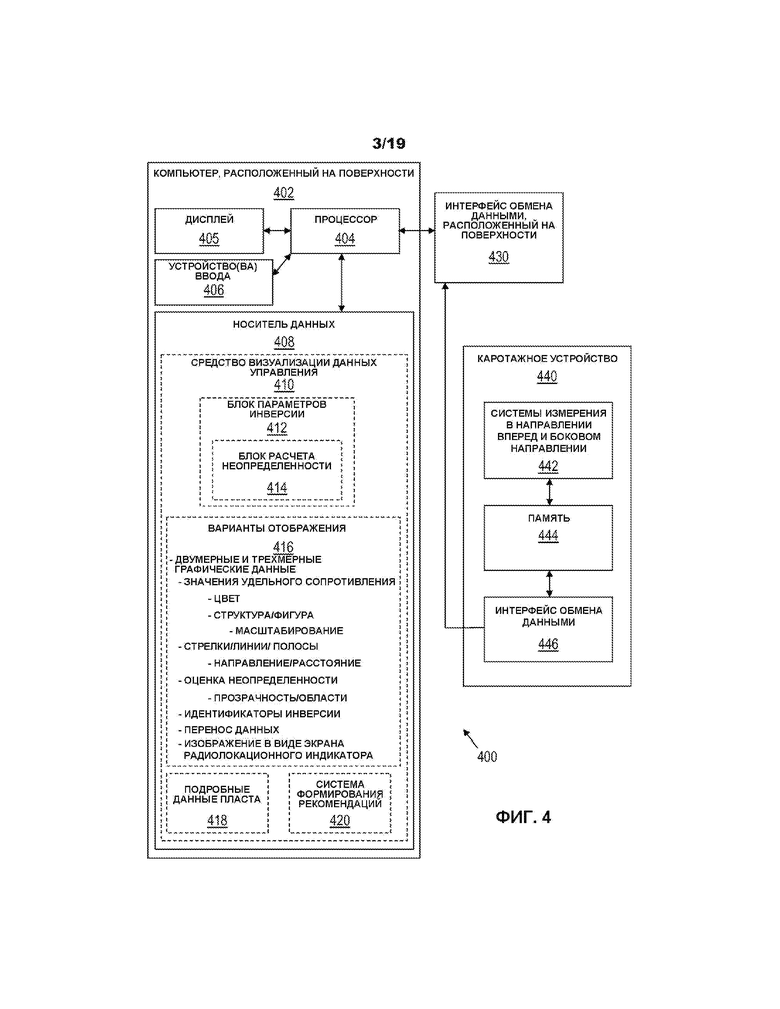
Фиг. 4 иллюстрирует структурную схему системы визуализации данных КВБ.
Фиг. 5A-5U иллюстрируют примеры вариантов отображения, предусмотренных средством визуализации данных управления.
Фиг. 6 иллюстрирует структурную схему способа реализации системы визуализации данных КВБ.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 иллюстрирует схематический пример структуры, в рамках которой осуществляется каротаж во время бурения (КВБ). Как проиллюстрировано на фиг. 1, на буровой платформе 2 установлена буровая вышка 4, имеющая талевый блок 6 для подъема и спуска бурильной колонны 8. Бурильная колонна 8, которая опускается в скважину через стол 12 ротора, прикреплена к ведущей трубе 10 бурильной колонны. Стол 12 ротора приводит во вращение бурильную колонну 8, вращая, таким образом, буровое долото 14. При вращении долота 14 пробуривается скважина 16, проходящая сквозь различные пласты 18. Насос 20 обеспечивает циркуляцию бурового раствора по подающей трубе 22 к ведущей трубе 10, в скважину по внутреннему пространству бурильной колонны 8, через насадки в буровом долоте 14, обратно к поверхности по затрубному пространству 9 снаружи бурильной колонны 8 и в пруд-накопитель 24. Буровой раствор выносит шлам из скважины 16 в пруд-накопитель 24, и способствуют сохранению целостности скважины. В зависимости от требований эксплуатации буровой раствор может быть приготовлен на нефтяной основе (с высоким удельным сопротивлением) или на водной основе (с низким удельным сопротивлением).
Фиг. 3 иллюстрирует пример каротажного устройства 28 в условиях подземной среды, содержащей множество пластов или слоев 18A – 18D и границ 90A – 90E пластов. Хотя пласты 18A – 18D и границы 90A – 90E пластов представлены в виде двумерного (2D) изображения с использованием прямых линий, очевидно, что подземные структуры обычно имеют наклонные или криволинейные формы пластов и границ пластов.
На фиг. 3 проиллюстрированы стрелки, проходящие в различных направлениях. Стрелка 70 направлена в боковую сторону относительно каротажного устройства 28 и проходит в поперечном направлении наружу, стрелка 72 направлена вперед относительно каротажного устройства 28, стрелка 74 направлена строго по вертикали и проходит вниз относительно каротажного устройства 28, а стрелка 76 направлена строго по горизонтали и проходит в боковую сторону относительно каротажного устройства 28. На фиг. 3 также проиллюстрированы различные углы, в том числе угол 80, соответствующий относительному углу наклона каротажного устройства 28 (то есть, углу между стрелкой 74 и стрелкой 72), и угол 82, соответствующий азимуту границы 90C пласта относительно азимута направления перемещения начальной точки устройства.
Фиг. 3 иллюстрирует также различные стрелки, указывающие расстояние по вертикали между каротажным устройством 28 и границами различных пластов. Более конкретно, стрелка 80 представляет расстояние по вертикали между каротажным устройством 28 и границей 90B пласта, стрелка 82 представляет расстояние по вертикали между каротажным устройством 28 и границей 90A пласта, стрелка 84 представляет расстояние по вертикали между каротажным устройством 28 и границей 90C пласта, а стрелка 86 представляет расстояние по вертикали между каротажным устройством 28 и границей 90D пласта.
В соответствии с некоторыми вариантами реализации изобретения данные расстояний и углов, такие как расстояния и углы, проиллюстрированные на фиг. 3, отображаются или представляются программой визуализации данных управления, в которой используются данные измерений в направлении вперед и (или) боковом направлении относительно долота. Параметры, отображаемые или представляемые программой визуализации данных управления, без ограничения могут охватывать физические параметры, такие как ориентация устройства, значения удельного сопротивления пласта, удельное сопротивление по вертикали, удельное сопротивление по горизонтали, относительные углы падения, относительные углы азимута, линии падения пластов, азимуты пластов, траектория ствола, расстояние до границ пластов, водонасыщенность и пористость пласта. Кроме того, программа визуализации данных управления может отображать или представлять расчетные параметры, такие как оценки неопределенности, информация относительно типа инверсии и (или) сравнительные данные. В результате отображения или представления физических и расчетных параметров программа визуализации данных управления обеспечивает оператору системы КВБ возможность принятия решений относительно управления устройством КВБ или пересмотра предшествующих операций управления, как указано в настоящем документе.
Фиг. 4 иллюстрирует структурную схему системы 400 визуализации данных КВБ. Система 400 визуализации данных КВБ содержит каротажное устройство 440 (например, каротажное устройство 28), имеющее системы 442 измерения в направлении вперед и боковом направлении, предназначенные для получения данных в направлении вперед и (или) боковом направлении относительно долота. Каротажное устройство 440 содержит также память 444, предназначенную для запоминания полученных данных измерений и (или) хранения инструкций по выполнению каротажа. Интерфейс 446 обмена данными каротажного устройства 440 обеспечивает передачу данных измерений в направлении вперед и (или) боковом направлении относительно долота на интерфейс 430 обмена данными, расположенный на поверхности. Интерфейс 430 обмена данными, расположенный на поверхности, осуществляет подачу данных измерений в направлении вперед и (или) боковом направлении относительно долота на компьютер 402, расположенный на поверхности.
Как проиллюстрировано на фиг. 4, компьютер 402, расположенный на поверхности, содержит процессор 404, соединенный с дисплеем 405, устройством (устройствами) 406 ввода и носителем 408 данных. Дисплей 405 и устройство (устройства) 406 ввода функционируют в качестве интерфейса пользователя, предоставляющего оператору системы КВБ возможность просмотра информации и ввода команд управления или команд, определяющих параметры интерфейса (для контроля способа отображения информации). Носитель 408 данных содержит программу 410 визуализации данных управления, которая при выполнении процессором 404 реализует различные варианты 416 отображения на основании данных измерений в направлении вперед и (или) боковом направлении относительно долота, полученных каротажным устройством 440.
В некоторых вариантах реализации изобретения устройство (устройства) 406 ввода содержит сенсорный экран, мышь и (или) клавиатуру, функционально связанную с интерфейсом пользователя для подачи входных данных пользователя с целью перехода между различными вариантами отображения, представления нескольких вариантов отображения, включения различных функций отображения и (или) выключения различных функций отображения. Кроме того, устройство (устройства) 406 ввода обеспечивает оператору возможность взаимодействия с интерфейсом визуализации данных управления, способствующим принятию оператором решений, касающихся управления, с использованием одного или более вариантов отображения, описанных в настоящем документе.
Варианты 416 отображения охватывают различные двумерные (2D) или трехмерные (3D) графические изображения, на которых положение (ориентация) устройства и характеристики пласта (например, удельное сопротивление или магнитная проницаемость) представляются цветами, структурами и (или) фигурами. Конкретные материалы пласта также могут быть выделены цветами, структурами и (или) фигурами. В некоторых вариантах реализации изобретения структуры или фигуры, используемые для представления характеристик пласта, имеют стандартный вид, указывающий изотропные характеристики пласта, и масштабированный (относительно стандартного вида) вид, указывающий анизотропные характеристики пласта. Варианты двумерного и трехмерного графического представления могут предусматривать использование стрелок, линий и (или) полос для указания направления и расстояния (например, направления и расстояния между буровым долотом и границей пласта). Варианты двумерного и трехмерного графического представления могут также включать оценку неопределенности отображаемых или представляемых данных. В некоторых вариантах реализации изобретения неопределенность представляется изменением прозрачности отображаемых данных (повышение прозрачности указывает на повышение неопределенности), изменением оттенка отображаемых данных или посредством указания области неопределенности отображаемых данных. Варианты двумерного и трехмерного графического представления могут также охватывать отображение данных, соответствующих различным способам инверсии, совместно с идентификаторами инверсии. Варианты двумерного и трехмерного графического представления могут также предусматривать перенос графических данных, выходящих за пределы границы изображения. Варианты двумерного и трехмерного графического представления могут также охватывать изображения в виде экрана радиолокационного индикатора, отображающие направление и расстояние между границами пластов и буровым долотом.
В некоторых вариантах реализации изобретения носитель 408 данных осуществляет хранение команд, которые при выполнении процессором 404 обеспечивают представление вариантов отображения с функциями и (или) параметрами отображения, как описано в настоящем документе. Команды, выполняемые процессором 404, могут дополнительно обеспечивать переход между различными вариантами отображения в ответ на запрос пользователя. Команды, выполняемые процессором 404, могут дополнительно обеспечивать представление нескольких вариантов отображения в ответ на запрос пользователя. Команды, выполняемые процессором 404, могут дополнительно обеспечивать включение или выключение различных функций отображения в ответ на запрос пользователя.
Варианты 416 отображения, описанные в настоящем документе, обеспечивают представление данных на основании информации блока 412 параметров инверсии и соответствующей информации блока 414 расчета неопределенности, используемой программой 410 визуализации данных управления. Далее, в некоторых примерах реализации изобретения варианты 416 отображения, описанные в настоящем документе, являются интерактивными и содержат дополнительные данные пласта в случае выбора пользователем режима интерактивного представления данных. Для выполнения указанных интерактивных операций в программе 410 визуализации данных управления предусмотрен модуль 418 подробных данных пласта. Программа 410 визуализации данных управления содержит также систему 420 формирования рекомендаций, предназначенную для представления предлагаемых операций управления на основании заданных критериев и полученных данных измерений в направлении вперед и (или) боковом направлении относительно долота. Система 420 формирования рекомендаций может отображать предлагаемые операции управления в виде линий, стрелок или других указателей направления в рамках варианта 416 отображения, определенного программой 410 визуализации данных управления. Система 420 формирования рекомендаций может также отображать аварийные сигналы, если удовлетворяются заданные критерии (например, расстояние до ближайшей границы пласта меньше порогового значения).
Фиг. 5A-5U иллюстрируют различные примеры вариантов отображения, предусмотренных программой 410 визуализации данных управления. Хотя в настоящем документе это не показано, различные варианты отображения, проиллюстрированные на фиг. 5A-5U, могут содержать цветовые или символьные условные обозначения, способствующие интерпретации оператором отображаемых данных. Некоторые варианты отображения (см., например, фиг. 5A-5F и 5L-5S) обеспечивают представление простых двумерных изображений, способствующих принятию решений, касающихся управления. Например, фиг. 5A-5F иллюстрируют данные измерений в реальном времени в направлении вперед или боковом направлении в пределах рабочего диапазона каротажного устройства, но не представляют данные в направлении назад относительно долота. В альтернативных примерах реализации изобретения варианты отображения, аналогичные проиллюстрированным на фиг. 5A-5F, могут отображать данные измерений в направлении назад относительно долота или предшествующие данные, полученные в результате инверсии. Например, отрицательное значение расстояния и соответствующие данные измерения характеристик пласта могут быть представлены для каждого значения фактической глубины по вертикали (ФГВ), проиллюстрированного на фиг. 5A-5F, с целью указания данных измерений в направлении назад относительно долота. В то же время фиг. 5L-5S иллюстрируют простые двумерные изображения данных измерений в направлении вперед и направлении назад относительно долота с целью указания предшествующего положения долота и направления перемещения долота в пределах небольшого диапазона (например, диапазона каротажного устройства). Другие варианты отображения (см., например, фиг. 5G-5J, 5T и 5U) обеспечивают представление для операторов значительного сегмента траектории бурения, предоставляя возможность рассмотрения стратегии управления и анализа подземных пластов. Прочие варианты отображения (см., например, фиг. 5K) дают оператору возможность представления подробных данных границ пластов.
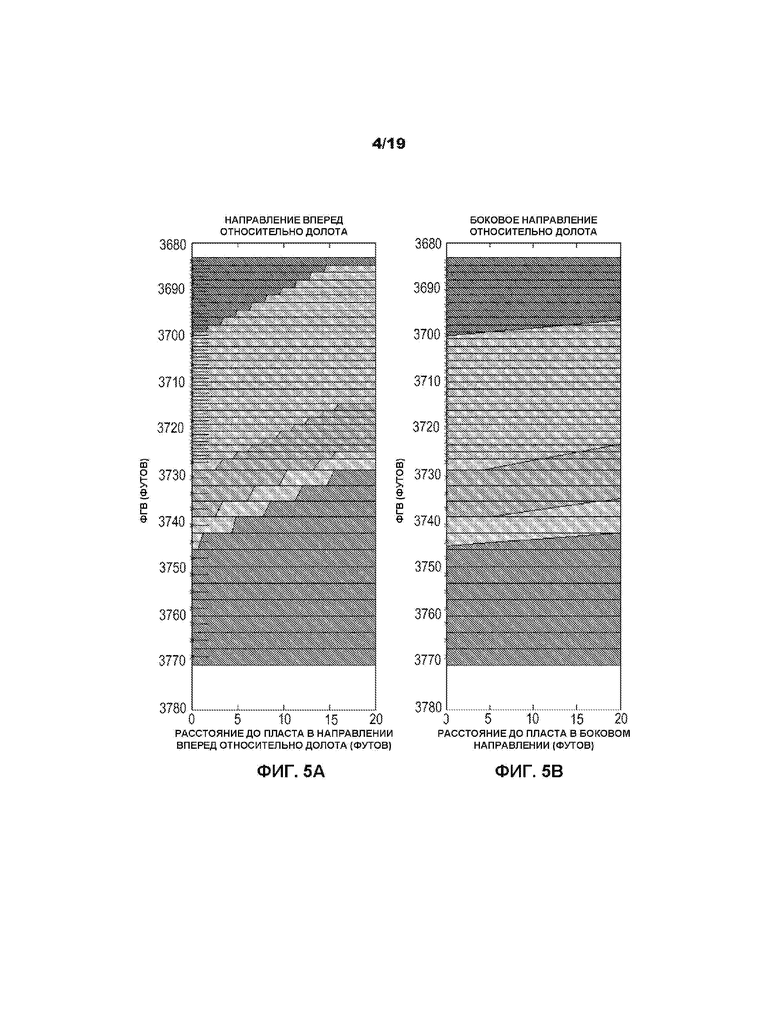
Фиг. 5A иллюстрирует вариант двумерного изображения, представляющий расстояние в направлении вперед до границы пласта как функции от фактической глубины по вертикали (ФГВ) с использованием различных цветов для указания различных значений удельного сопротивления пласта. В различных вариантах реализации изобретения цвет может использоваться для указания значения удельного сопротивления, значения магнитной проницаемости или других параметров пласта, которые могут быть измерены датчиками для каротажа или каротажными устройствами. Данные, проиллюстрированные на фиг. 5A, указывают результаты измерений для каждого значения ФГВ в направлении вперед относительно долота, соответствующем направлению стрелки 72 (см. фиг. 3). Таким образом, для каждого значения ФГВ расстояние 0 (нуль) соответствует начальной точке, размещенной на долоте или вблизи долота, причем представленные данные указаны от этой начальной точки (на расстояние до 20 футов (6,096 м) или другое расстояние в пределах рабочего диапазона каротажного устройства) в направлении стрелки 72. Например, на уровне ФГВ, равном 3730, в направлении перед долотом, соответствующем направлению стрелки 72, в пределах 20 футов (6,096 м) от начальной точки находятся три различных материала пласта и две границы пластов. Более конкретно, на уровне ФГВ, равном 3730, первый материал пласта находится в пределах 0–10 футов (0-3,048 м) в направлении вперед от начальной точки, второй материал пласта находится в пределах 10 – 15 футов (3,048 - 4,572 м) в направлении вперед относительно долота, а третий материал пласта находится в пределах 15 – 20 футов (4,572 - 6,096 м) в направлении вперед относительно долота, соответствующем направлению стрелки 72. Таким образом, на уровне ФГВ, равном 3730, в пределах 20 футов (6,096 м) от начальной точки в направлении стрелки 72 находятся две границы пластов. Одна граница размещена на расстоянии примерно 10 футов (3,048 м) перед долотом, а вторая граница – на расстоянии примерно 15 футов (4,572 м) перед долотом. Каждая из указанных границ пластов представлена линией, наклон которой соответствует углу наклона устройства относительно границы пласта (то есть, углу 80, проиллюстрированному на фиг. 3). Очевидно, что указанный угол может быть различным для разных границ пластов и различных значений ФГВ.
Фиг. 5B иллюстрирует вариант двумерного изображения, представляющий расстояние в «поперечном» или «боковом» направлении до следующей границы пласта как функции от фактической глубины по вертикали (ФГВ) с использованием различных цветов для указания различных значений удельного сопротивления пласта. Как указано в отношении фиг. 5A, цвет может использоваться для указания значения удельного сопротивления, значения магнитной проницаемости или других параметров пласта, которые могут быть измерены датчиками для каротажа или каротажными устройствами. На фиг. 5B расстояние для каждого значения ФГВ указано в боковом направлении, соответствующем направлению стрелки 70 (см. фиг. 3). Таким образом, для каждого значения ФГВ расстояние 0 (нуль) соответствует начальной точке, размещенной на долоте или вблизи долота, причем представленные данные указаны от этой начальной точки (расстояние до 20 футов или другое расстояние в пределах рабочего диапазона каротажного устройства) в направлении стрелки 70. Например, на уровне ФГВ, равном 3700, два различных материала пласта и одна граница находятся в пределах 20 футов от начальной точки в направлении, указанном стрелкой 70. Граница пласта представлена линией, проходящей под углом, соответствующим углу наклона (угол 80 на фиг. 3). Очевидно, что указанный угол может быть различным для разных границ пластов и различных значений ФГВ.
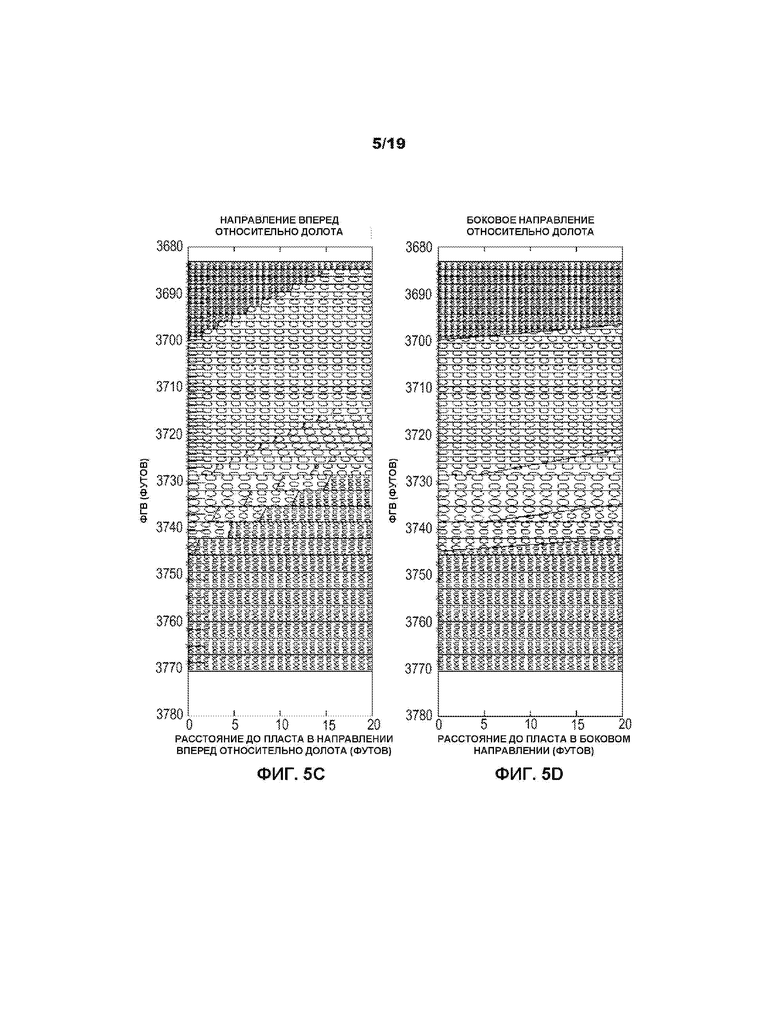
Фиг. 5C иллюстрирует вариант двумерного изображения, представляющий расстояние в направлении вперед до границы пласта как функции от фактической глубины по вертикали (ФГВ) с использованием плотности структуры для указания различных значений удельного сопротивления пласта (то есть, более высокая плотность структуры соответствует более высокому значению удельного сопротивления). В различных вариантах реализации изобретения плотность структуры или конкретный вид структуры могут использоваться для указания значения удельного сопротивления, значения магнитной проницаемости или других параметров пласта, которые могут быть измерены датчиками для каротажа или каротажными устройствами. Данные, проиллюстрированные на фиг. 5C, аналогичны данным, проиллюстрированным на фиг. 5A, за исключением того, что вместо цвета для указания различных значений удельного сопротивления пласта на фиг. 5C используется плотность структуры.
Фиг. 5D иллюстрирует вариант двумерного изображения, представляющий расстояние в боковом направлении до границы пласта как функции от фактической глубины по вертикали (ФГВ) с использованием плотности структуры для указания различных значений удельного сопротивления пласта. В различных вариантах реализации изобретения плотность структуры или конкретный вид структуры могут использоваться для указания значения удельного сопротивления, значения магнитной проницаемости или других параметров пласта, которые могут быть измерены датчиками для каротажа или каротажными устройствами. Данные, проиллюстрированные на фиг. 5D, аналогичны данным, проиллюстрированным на фиг. 5B, за исключением того, что вместо цвета для указания различных значений удельного сопротивления пласта на фиг. 5D используется плотность структуры.
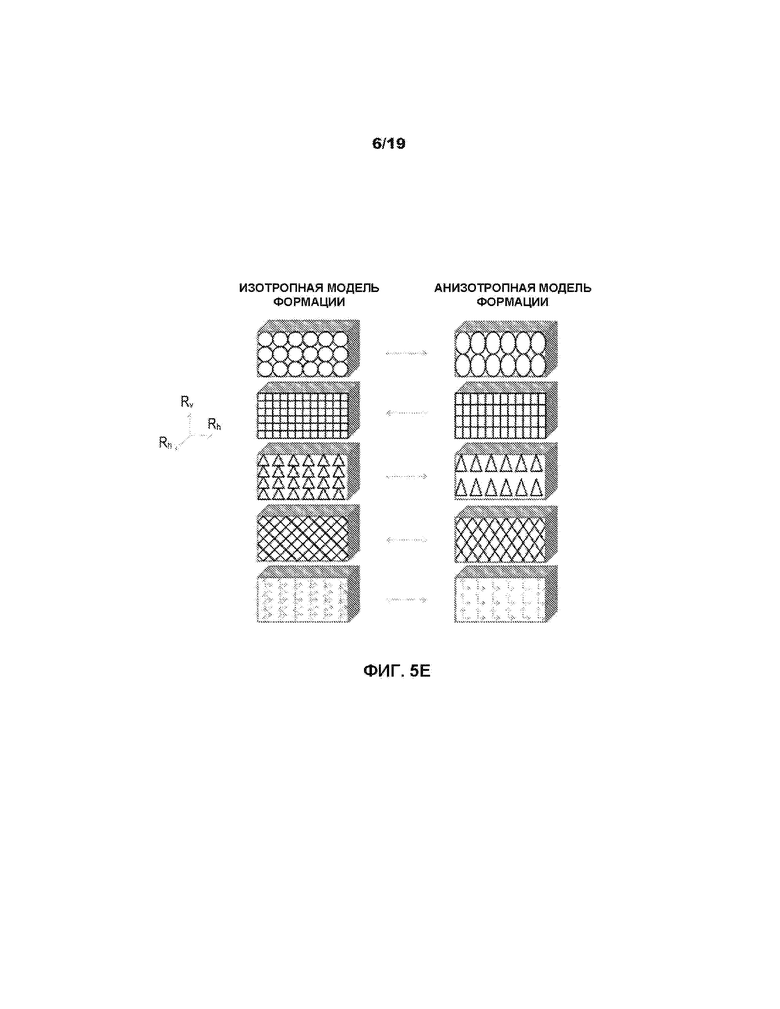
Фиг. 5E иллюстрирует изотропные и анизотропные модели пласта, которые могут использоваться в заданных вариантах отображения. Как проиллюстрировано на фиг. 5E, анизотропная модель пласта представляет собой масштабированную версию изотропной модели пласта, которая может соответствовать стандартной структуре. При формировании вариантов отображения в различных направлениях могут использоваться различные коэффициенты масштабирования, каждый из которых соответствует характеристике пласта в данном направлении. Сама структура также может изменяться. Фиг. 5E иллюстрирует различные примеры структур, которые могут использоваться для представления анизотропии, в том числе фигуры, линии и стрелки, а также сетчатые структуры.
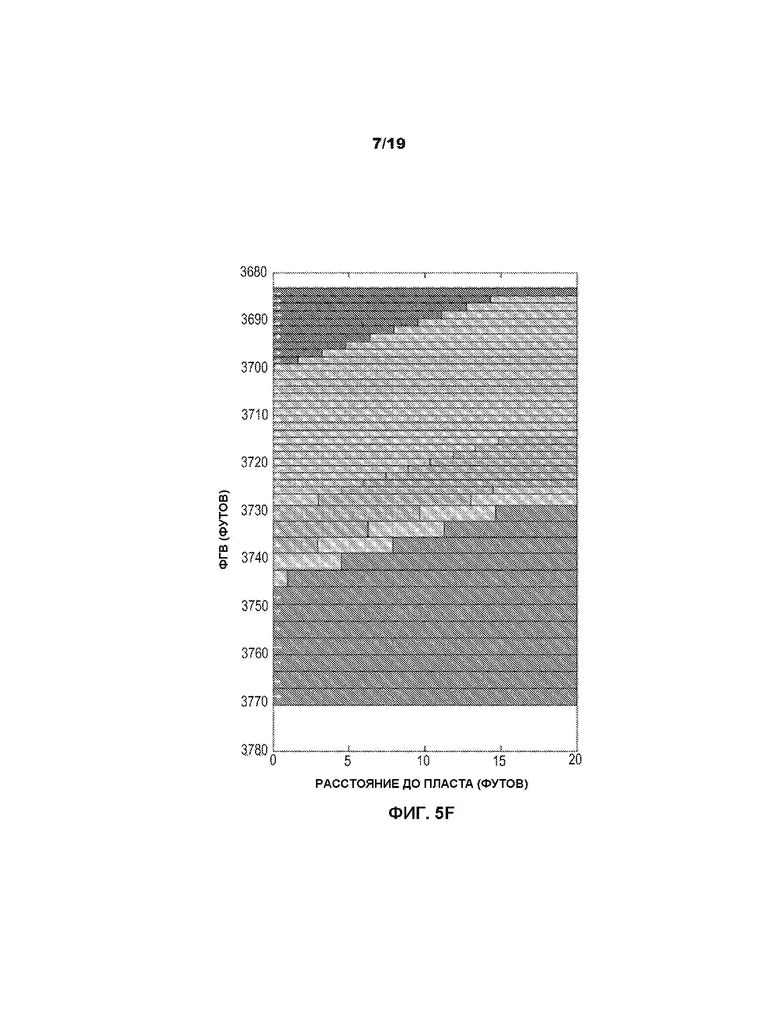
Фиг. 5F является аналогичной фиг. 5A и иллюстрирует вариант двумерного изображения, представляющий расстояние в направлении вперед до границы пласта как функции от фактической глубины по вертикали (ФГВ) с использованием различных цветов для указания различных значений удельного сопротивления пласта. На фиг. 5F границы пластов представлены прямыми линиями, не содержащими данных относительного угла наклона. В то же время данные относительного угла наклона для каждого отдельного значения ФГВ представлены стрелкой, начинающейся на расстоянии 0 (нуль). Каждая стрелка или другой указатель относительного угла наклона представляет относительный угол наклона между направлением перемещения долота или начальной точки и ближайшей границей пласта. В альтернативных вариантах реализации изобретения величина, положение и (или) указатель относительного угла наклона могут быть иными. Далее, вместо указателя, имеющего определенную форму, или в дополнение к такому указателю может быть представлено численное значение. Кроме того, для некоторых значений ФГВ данные относительного угла наклона могут не указываться.
Может быть представлен вариант двумерного изображения (не показан), подобный проиллюстрированному на фиг. 5B, в котором использованы прямые линии границ пластов, а для каждого значения ФГВ предусмотрен указатель относительного угла наклона в боковом направлении (то есть, угол 80 наклона, проиллюстрированный на фиг. 3, сдвинутый на 90 градусов). В альтернативных вариантах реализации изобретения величина, положение и (или) указатель относительного угла наклона в боковом направлении могут быть иными. Далее, в дополнение к указателю, имеющему определенную форму, или вместо такого указателя может быть представлено численное значение. Очевидно, что значение указанного угла может быть различным для разных границ пластов и различных значений ФГВ. Кроме того, для некоторых значений ФГВ указатель относительного угла наклона в боковом направлении может не представляться.
Фиг. 5A-5F иллюстрируют варианты двумерного изображения, представляющие характеристики пласта (например, удельное сопротивление пласта и (или) магнитную проницаемость пласта) в заданном направлении относительно начальной точки устройства как функции от глубины. В некоторых вариантах реализации изобретения заданное направление соответствует направлению вперед относительно долота от начальной точки. В альтернативных вариантах реализации изобретения заданное направление соответствует боковому направлению относительно долота от начальной точки. Кроме того, варианты отображения, проиллюстрированные на фиг. 5A-5F, могут содержать наклонную линию, представляющую границу пласта между двумя слоями пласта, расположенными на определенной глубине, причем угол наклона линии соответствует указателю относительного угла наклона между заданным направлением и границей пласта. В альтернативных примерах реализации изобретения прямая линия может быть отображена на вариантах отображения, проиллюстрированных на фиг. 5A-5F, для представления границы пласта между двумя слоями пласта, расположенными на определенной глубине, причем для данного значения глубины в дополнение к прямой линии отображается указатель относительного угла наклона, представляющий угол между заданным направлением и границей пласта. Указатель относительного угла наклона может представлять собой стрелку, начало которой размещено в начальной точке или вблизи начальной точки устройства, причем угол стрелки относительно направления перемещения начальной точки определяет относительный угол наклона. В некоторых примерах реализации изобретения в вариантах отображения, проиллюстрированных на фиг. 5A-5F, может представляться отдельный указатель относительного угла наклона границы пласта для каждого значения глубины.
Для указания характеристик пласта (например, удельного сопротивления и (или) магнитной проницаемости пласта) в вариантах отображения, проиллюстрированных на фиг. 5A-5F, может использоваться цвет, причем различные цвета могут представлять различные значения характеристик пласта. В альтернативных примерах реализации изобретения в вариантах отображения, проиллюстрированных на фиг. 5A-5F, для представления характеристик пласта могут использоваться структуры, причем для указания различных значений характеристик пласта используются различные плотности структур. Далее, структура может быть масштабирована относительно стандартной структуры по меньшей мере в одном направлении для представления значений анизотропных характеристик пласта.
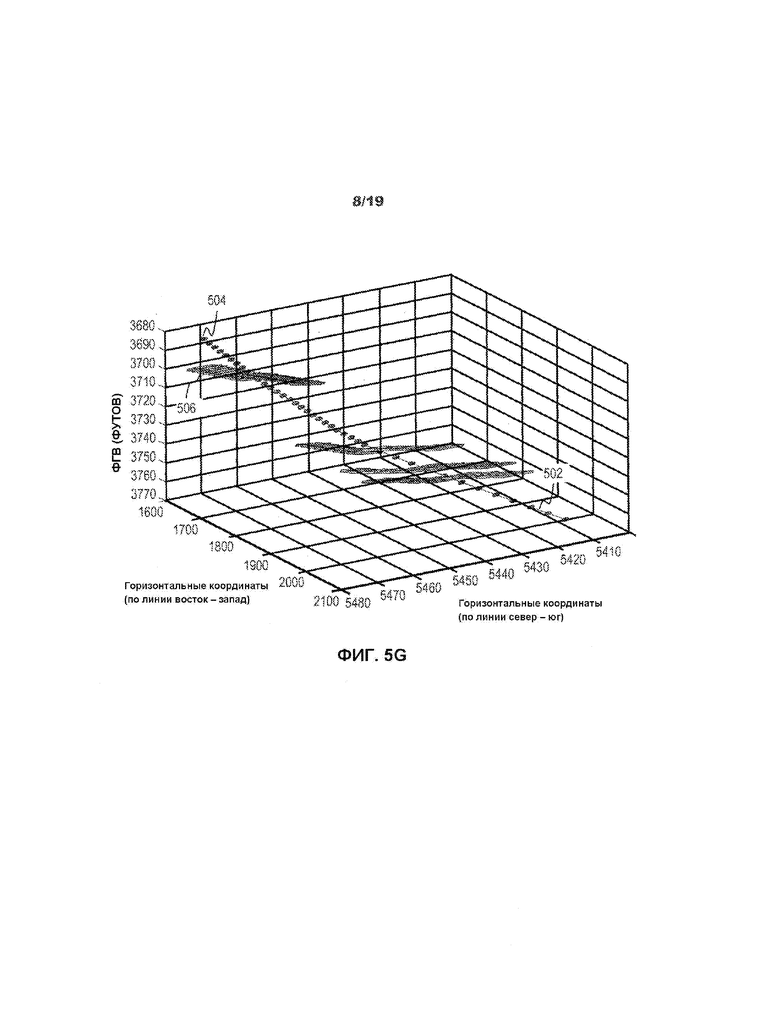
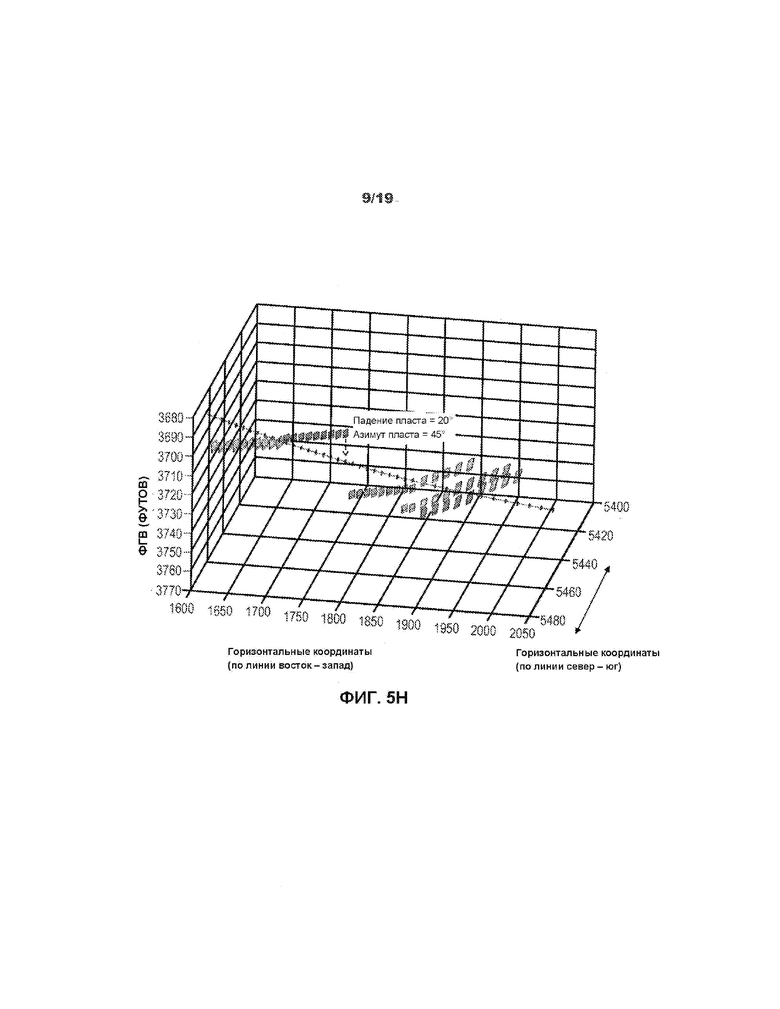
Фиг. 5G иллюстрирует вариант трехмерного изображения, представляющий траекторию бурения и границы пластов, причем для указания различных значений параметров на границах пластов используются различные цвета, фигуры или структуры. На фиг. 5G куб или другая фигура указана вдоль траектории бурения для каждого значения ФГВ, причем ориентация куба или фигуры может соответствовать ориентации устройства. В результате графического представления данных в направлении вперед и (или) боковом направлении относительно долота для множества значений ФГВ вдоль траектории бурения выполняется отображение границ пластов в пределах рабочего диапазона каротажного устройства. Границы пластов могут быть представлены цветом, фигурами, призмами или линиями, причем отображаемый угол или наклон границы пласта соответствует углу наклона границы для вида в перспективе, представленного в варианте трехмерного изображения. Пример варианта трехмерного изображения, проиллюстрированный на фиг. 5G, может быть получен, например, посредством отображения данных измерений в боковом направлении относительно долота для каждого значения ФГВ. В качестве конкретного примера данные объекта 504, представляющего устройство, указанные вдоль траектории 502 ствола скважины, могут быть связаны с данными объекта 506, представляющего характеристики пласта, причем угол объекта 504, представляющего устройство, указывает ориентацию устройства, а угол объекта 506, представляющего характеристики пласта, указывает относительный угол наклона ближайшей границы пласта (то есть, угол 80 проиллюстрированный на фиг. 3). Очевидно, что значение относительного угла наклона может быть различным для разных границ пластов и различных значений ФГВ. На фиг. 5G проиллюстрированы примерно 40 блоков, соответствующих интервалам ФГВ, и 40 фигур, указывающих границы пластов (по одной фигуре на каждый блок ФГВ). Однако следует отметить, что не каждому интервалу ФГВ соответствует фигура, указывающая границы пласта (при отсутствии границ пласта в пределах рабочего диапазона устройства на заданном интервале ФГВ). Кроме того, некоторые интервалы ФГВ могут соответствовать нескольким фигурам, указывающим границы пласта (при наличии нескольких границ пластов в пределах рабочего диапазона устройства на заданном интервале ФГВ).
В некоторых примерах реализации изобретения вариант трехмерного изображения, проиллюстрированный на фиг. 5G, содержит множество интерактивных точек, размещенных вдоль траектории бурения, при выборе которых отображается дополнительная информация, такая как расстояние до ближайшей границы пласта, относительный угол наклона ближайшей границы пласта, азимут ближайшей границы пласта и (или) другие данные. Фиг. 5H иллюстрирует повернутое трехмерное изображение, соответствующее варианту трехмерного изображения, проиллюстрированному на фиг. 5G. Повернутые трехмерные изображения, проиллюстрированные на фиг. 5H, могут способствовать упрощению рассмотрения отображаемых данных. Далее, фиг. 5H иллюстрирует подробные данные пласта (угол падения пласта = 20° и азимут пласта = 45°), соответствующие одной интерактивной точке вдоль траектории бурения. Подробные данные пласта могут отображаться, например, при выборе пользователем определенной интерактивной точки или при проведении курсора над интерактивной точкой.
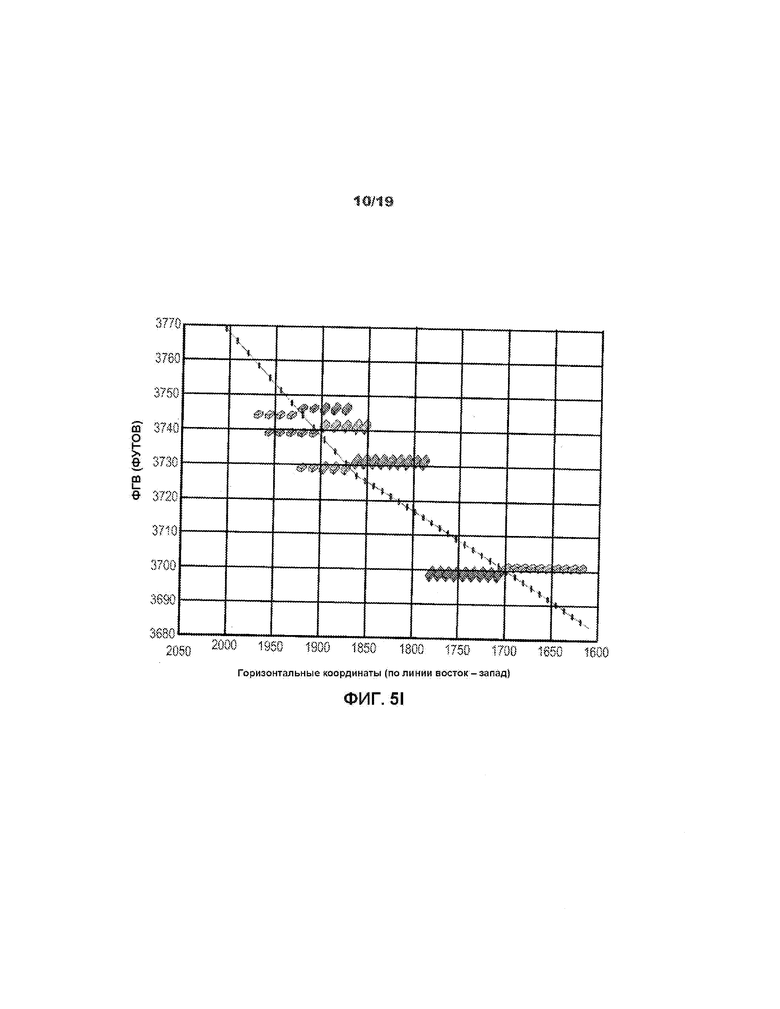
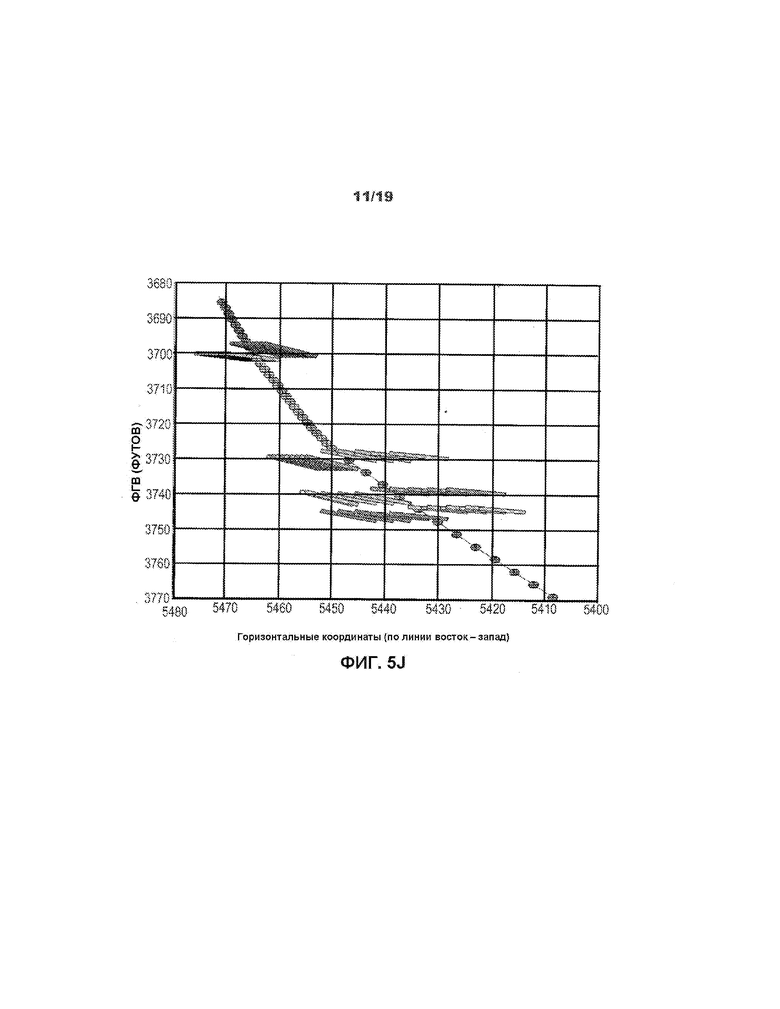
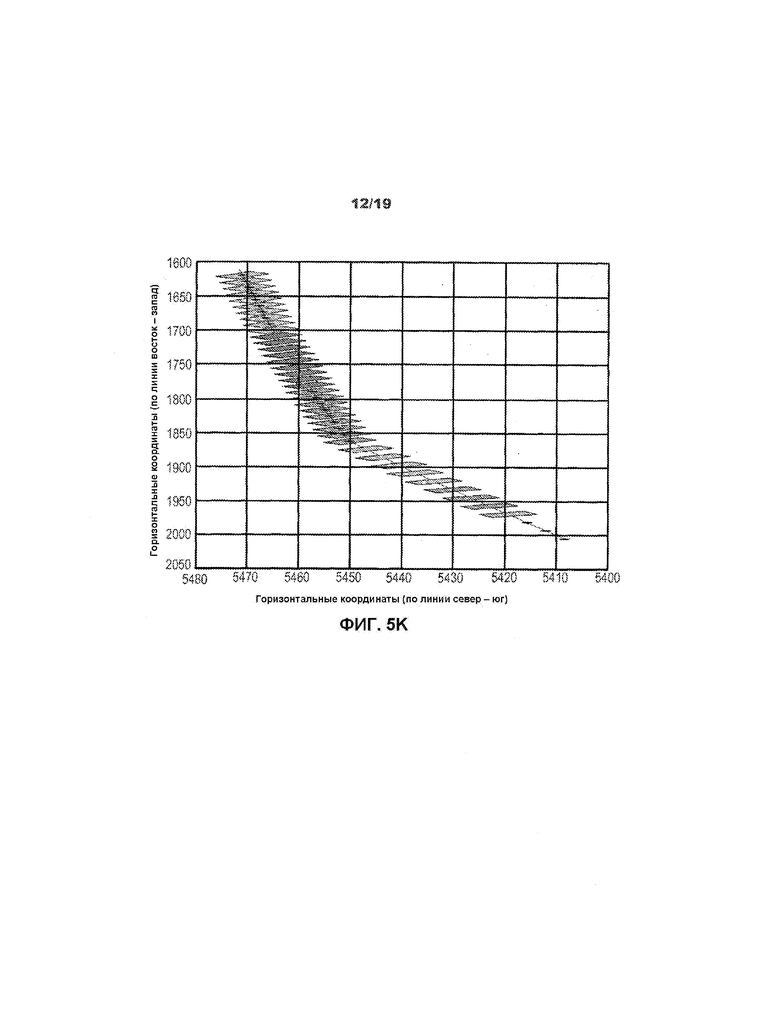
Фиг. 5I-5J иллюстрируют варианты двумерного изображения, соответствующие варианту трехмерного изображения, проиллюстрированному на фиг. 5G. Более конкретно, фиг. 5I иллюстрирует траекторию бурения и границы пластов, представленные как функции от ФГВ и горизонтальных координат по линии восток – запад, фиг. 5J иллюстрирует траекторию бурения и границы пластов, представленные как функции от ФГВ и горизонтальных координат по линии север – юг, а фиг. 5K иллюстрирует объекты, представляющие границы пластов, как функции от горизонтальных координат по линии восток – запад и горизонтальных координат по линии север – юг. Аналогично фиг. 5G на фиг. 5I-5J для указания различных значений удельного сопротивления на границах пластов можно использовать различные цвета или структуры. Кроме того, варианты двумерного изображения, проиллюстрированные на фиг. 5I-5J, могут содержать интерактивные точки, размещенные вдоль траектории бурения и обеспечивающие представление параметров пласта при выборе конкретной точки, как указано в настоящем документе. В вариантах двумерных и трехмерных изображений, проиллюстрированных на фиг. 5G-5J, для представления значений удельного сопротивления могут использоваться различные структуры, различные плотности структур и (или) различные коэффициенты масштабирования структур, как указано в настоящем документе.
Как указано выше, фиг. 5G-5J иллюстрируют варианты двумерных и трехмерных изображений, указывающих траекторию бурения (например, траекторию 502 на фиг. 5G) с объектами, находящимися на траектории бурения (например, объект 504), и объектами, представляющими характеристики пласта (например, объект 506 на фиг. 5G), которые соответствуют различным значениям глубины вдоль траектории бурения. В некоторых вариантах реализации изобретения каждый отображаемый объект, представляющий границу пласта, указывает часть границы пласта. Далее, каждый отображаемый объект, представляющий границу пласта, может содержать данные характеристик пласта, таких как удельное сопротивление или магнитная проницаемость. Вместе с тем каждый отображаемый объект, представляющий траекторию бурения, размещен на траектории бурения или вблизи указанной траектории и может содержать информацию, касающуюся ориентации устройства и (или) характеристик пласта вдоль траектории бурения. Например, каждый объект, представляющий границу пласта, или объект, представляющий траекторию бурения, проиллюстрированный на фиг. 5G-5J, может содержать атрибуты цвета или структуры, указывающие значение удельного сопротивления или магнитной проницаемости пласта. Далее, каждый объект, представляющий границу пласта, может содержать атрибут угла наклона, указывающий значение угла наклона границы пласта относительно направления перемещения начальной точки устройства. Кроме того, каждый объект, представляющий границу пласта, может содержать атрибут азимута, указывающий значение азимута границы пласта относительно направления перемещения начальной точки устройства. Аналогичным образом, каждый объект, представляющий траекторию бурения, может содержать атрибут угла наклона, указывающий значение угла наклона устройства в начальной точке, и может содержать атрибут азимута, указывающий значение азимута устройства в начальной точке.
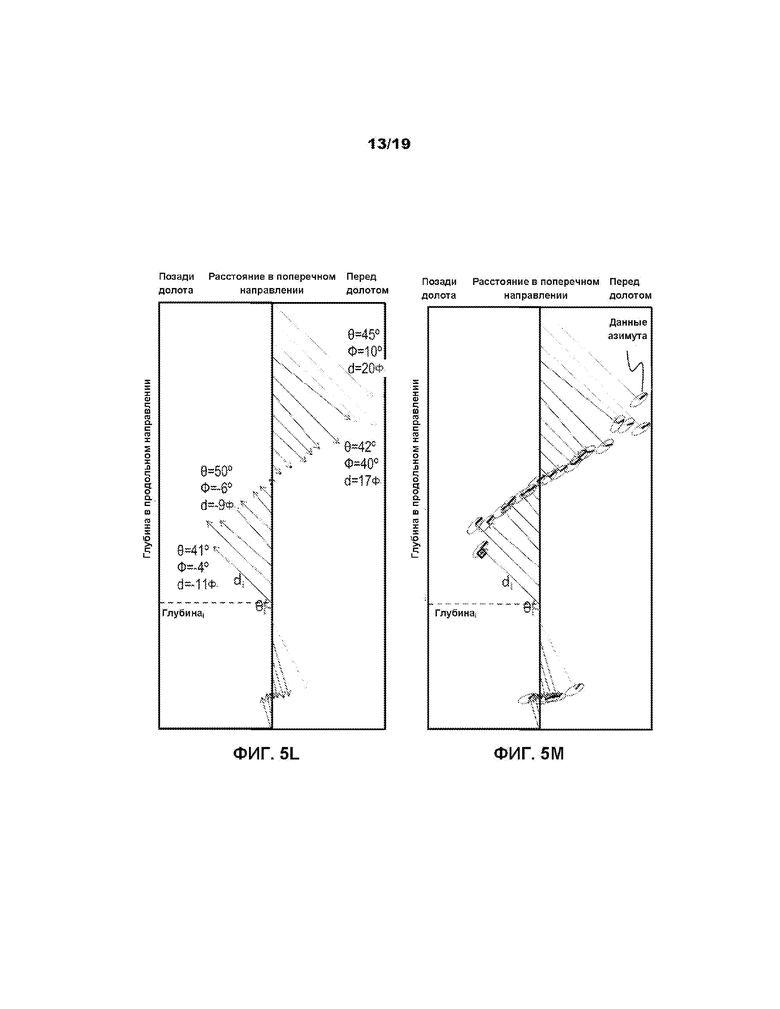
Очевидно, что варианты отображения, проиллюстрированные на фиг. 5G-5J, могут поворачиваться по меньшей мере в одном направлении. Далее, варианты отображения, проиллюстрированные на фиг. 5G-5J, могут поддерживать функции увеличения и уменьшения изображения. Кроме того, варианты отображения, проиллюстрированные на фиг. 5G-5J, могут обеспечивать выполнение выбора объекта, представляющего границу пласта, или объекта, представляющего траекторию бурения, с целью указания дополнительной информации, касающейся объекта, представляющего границу пласта, или объекта, представляющего траекторию бурения. Например, дополнительные данные объекта, представляющего траекторию бурения, могут содержать численное значения угла наклона устройства в начальной точке, численное значение азимута устройства в начальной точке и численное значение удельного сопротивления или магнитной проницаемости пласта в месте размещения выбранного объекта, представляющего траекторию бурения, или вблизи указанного объекта. Вместе с тем дополнительные данные объекта, представляющего границу пласта, могут содержать численное значение относительного угла наклона границы пласта, численное значение азимута между направлением ориентации устройства и границей пласта и численное значение удельного сопротивления или магнитной проницаемости пласта в месте размещения объекта, представляющего границу пласта, или вблизи указанного объекта. Фиг. 5L-5R иллюстрируют варианты двумерного отображения, на которых указаны линии, представляющие расстояние до границы пласта, как функции глубины по вертикали. Длина линий, представляющих расстояние до границы пласта, соответствует масштабированному физическому расстоянию. В то же время угол наклона линий, представляющих расстояние до границы пласта (относительно центральной линии, проиллюстрированной на фиг. 5L-5R), равен относительному углу наклона границы пласта при значении глубины по вертикали, соответствующему каждой линии, представляющей расстояние до границы пласта. Следует отметить, что угол наклона линий, представляющих расстояние до границы пласта, может быть измерен относительно горизонтальной или вертикальной оси.
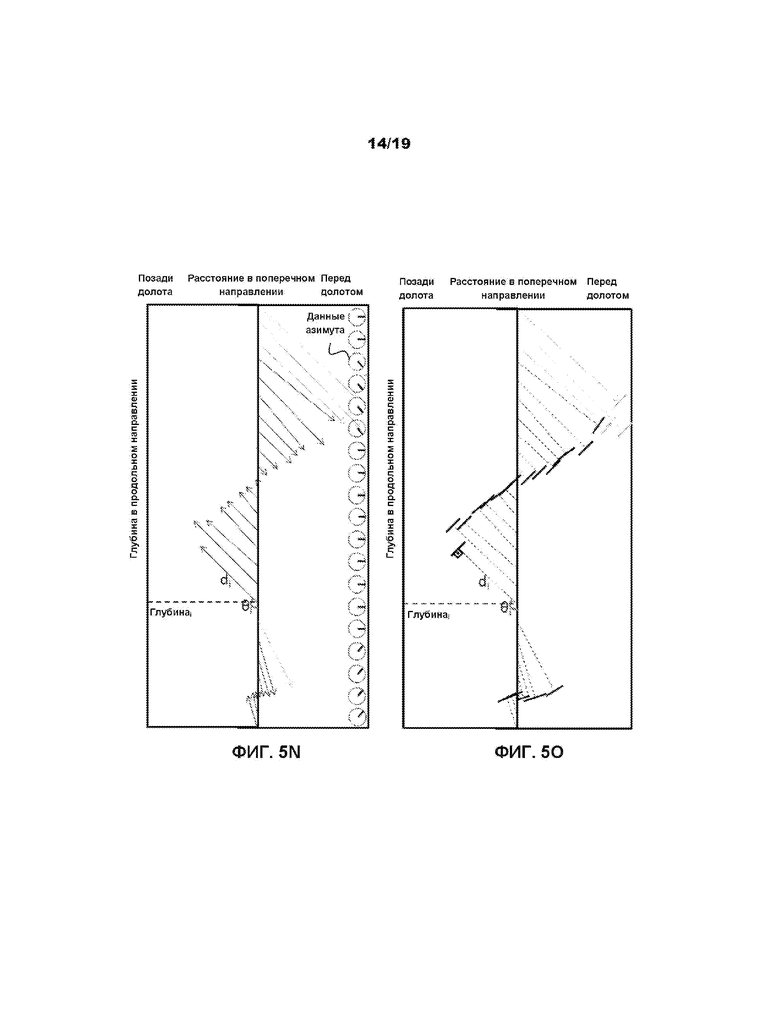
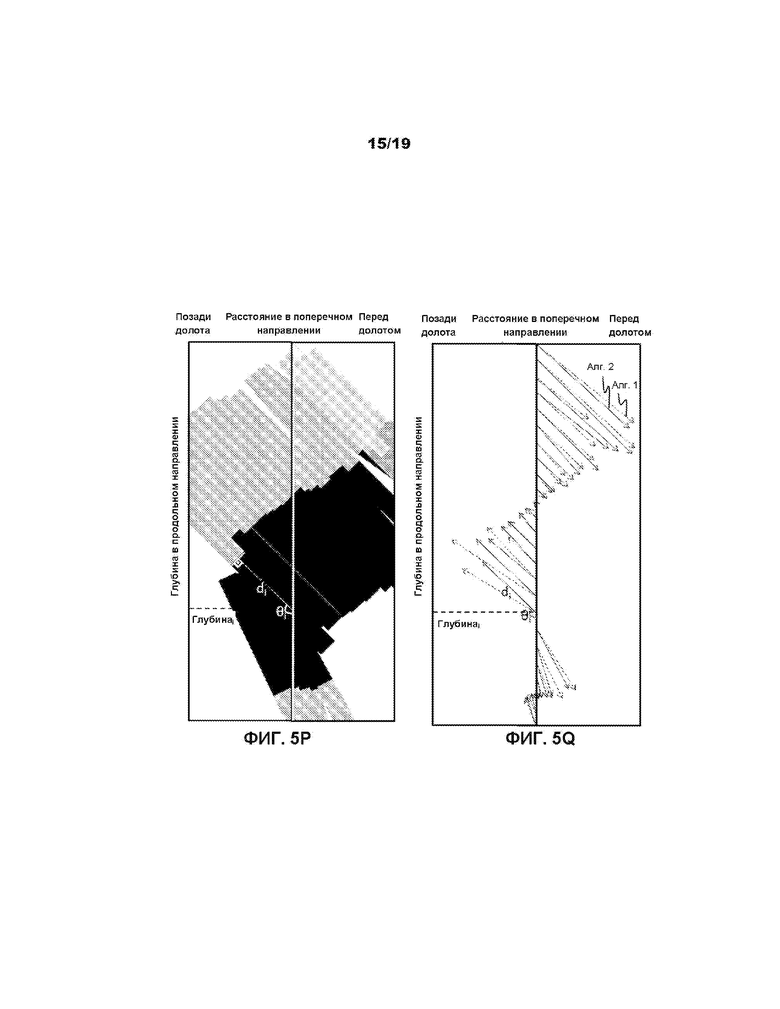
На фиг. 5L в качестве линий, представляющих расстояние, используются стрелки. Далее, фиг. 5L иллюстрирует подробные данные пласта, в том числе относительный угол (θ) наклона ближайшей границы пласта, азимут (ϕ) ближайшей границы пласта и расстояние (d) до ближайшей границы пласта для нескольких линий, представляющих расстояние. На фиг. 5M на конце каждой линии, представляющей расстояние, изображен указатель азимута (например, окружность с линией, соответствующей значению в градусах), предусмотренный для указания данных азимута ближайшей границы пласта. Более конкретно, данные азимута представлены в виде линии внутри окружности, причем ориентация линии в окружности указывает азимут ближайшей границы пласта. На фиг. 5N для предоставления данных азимута границы пласта относительно ориентации устройства вдоль одной из боковых сторон изображен указатель азимута для каждой линии, представляющей расстояние. В данном случае следует отметить, что направление или расстояние до границы пласта определяется от заданной начальной точки устройства до выбранной точки границы пласта. Например, выбранной точкой границы пласта может быть точка, находящаяся на минимальном расстоянии от заданной начальной точки устройства. Глубина для каждого указателя азимута, проиллюстрированного на фиг. 5N, соответствует глубине связанной с указателем линии, представляющей расстояние. На фиг. 5O линии, представляющие расстояние, являются пунктирными, а указатели азимута упрощенно отображены в виде отрезка линии, размещенного на конце каждой линии, представляющей расстояние. На фиг. 5P для указания линий, представляющих расстояние, использованы полосы. На фиг. 5L-5P верхние три линии или полосы являются более светлыми для указания большей степени неопределенности соответствующих им значений. В альтернативных вариантах реализации изобретения вместо представления различных уровней неопределенности светлыми тонами могут использоваться различные цвета или оттенки (например, менее насыщенный оттенок соответствует более высокому уровню неопределенности).
Фиг. 5Q иллюстрирует два набора линий, представляющих расстояние. Первый набор линий, представляющих расстояние (пунктирные линии со стрелкой), получен с использованием первого алгоритма инверсии, а второй набор линий, представляющих расстояние (сплошные линии со стрелкой), получен с использованием второго алгоритма инверсии. Как проиллюстрировано на фигуре, два набора линий, представляющих расстояние, слегка отличаются. Например, различные данные инверсии могут соответствовать двум наборам данных каротажа для одной области, полученным на различных частотах. Некоторые операторы систем КВБ могут отдавать предпочтение линиям, представляющим расстояние, которые получены с использованием первого алгоритма инверсии, а другие операторы – линиям, представляющим расстояние, которые получены с использованием второго алгоритма инверсии. Далее, некоторым операторам может потребоваться проанализировать различия между линиями, представляющими расстояние, которые получены с использованием двух или более алгоритмов инверсии.
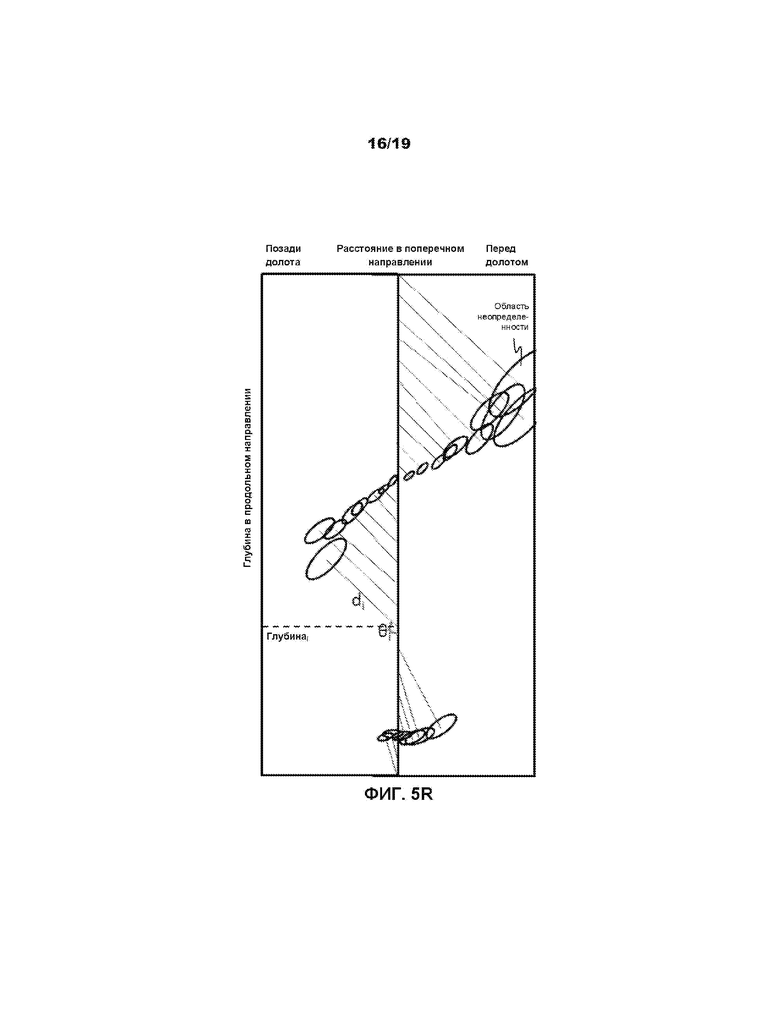
Фиг. 5R иллюстрирует линии, представляющие расстояние, с указанием области неопределенности на конце каждой линии, представляющей расстояние. В некоторых вариантах реализации изобретения оценка области неопределенности выполняется с использованием операции, предусматривающей введение шумового сигнала в процесс графического представления данных измерений и анализ плотности полученного результата. В альтернативных вариантах реализации изобретения для каждой линии, представляющей расстояние, может отображаться оценка (Qf) качества инверсии.
Как указано выше, фиг. 5L-5R иллюстрируют двумерные изображения, содержащие отдельный указатель расстояния до границы пласта (например, линию, представляющую расстояние) для каждого из множества конкретных значений глубины. Варианты отображения, проиллюстрированные на фиг. 5L-5R, также могут содержать центральную линию, представляющую начальную точку устройства как функции от глубины. В некоторых вариантах реализации изобретения каждый указатель расстояния до границы пласта представлен стрелкой, проходящей от центральной линии до границы пласта. В альтернативных вариантах реализации изобретения каждый указатель расстояния до границы пласта представлен полосой, проходящей по меньшей мере от центральной линии до ближайшей границы пласта. Очевидно, что каждая стрелка или полоса могут содержать цвет или структуру с целью представления данных удельного сопротивления или магнитной проницаемости пласта.
Варианты отображения, проиллюстрированные на фиг. 5L-5R, могут предусматривать представление указателя азимута по меньшей мере для одного из указателей расстояния до границы пласта с целью указания угла между азимутом границы пласта и азимутом направления перемещения начальной точки устройства. Например, указатель азимута может отображаться на границе пласта или вблизи указанной границы пласта, связанной с указателем расстояния до ближайшей границы пласта (например, на острие стрелки, которая заканчивается на границе пласта, или вблизи острия стрелки). В альтернативных вариантах реализации изобретения указатель азимута может отображаться вдоль боковой стороны изображения для глубины, соответствующей указателю расстояния до границы пласта. Указатель азимута может представлять собой радиальную линию внутри окружности, указывающую угол между азимутом границы пласта и азимутом направления перемещения начальной точки устройства.
По меньшей мере в некоторых примерах реализации изобретения вариант отображения (например, вариант отображения, проиллюстрированный на фиг. 5Q) содержит два набора указателей расстояния до границы пласта, соответствующих двум различным наборам данных, полученным устройством. Различные наборы данных могут соответствовать наборам данных каротажа, полученным с использованием двух различных частот каротажного устройства, или двум наборам данных каротажа, полученным с использованием двух различных типов каротажных устройств.
Кроме того, очевидно, что если несколько границ пластов находятся в пределах диапазона измерений устройства, то варианты отображения, аналогичные проиллюстрированным на фиг. 5L-5R, могут содержать несколько указателей расстояния до границы пласта, соответствующих одному значению глубины. Например, несколько стрелок или полос, представляющих расстояние до различных границ пласта, могут соответствовать одному значению глубины. В таком случае различные цвета и (или) структуры стрелок могут использоваться для выделения различных указателей расстояния до границы пласта. Далее, очевидно, что даже если несколько границ пластов находятся в пределах диапазона измерений устройства, то варианты отображения, аналогичные проиллюстрированным на фиг. 5L-5R, обеспечивают представление указателей расстояния до границ пласта только для ближайших границ пластов.
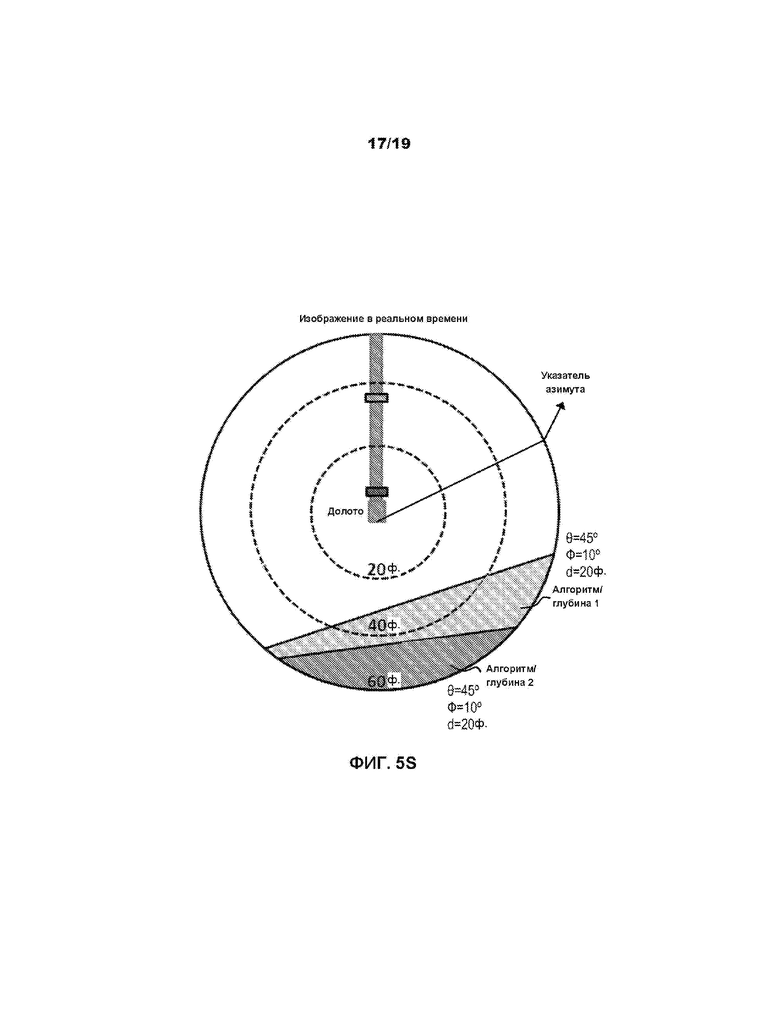
Фиг. 5S иллюстрирует вариант отображения в виде радиолокационного индикатора, на котором представлено расстояние до ближайшей границы пласта в направлении вперед или боковом направлении как функции от азимута. На фиг. 5S в центре радиолокационного индикатора отображается долото, а концентрические окружности используются для представления расстояния. На фиг. 5S могут отображаться цвета и структуры, представляющие удельное сопротивление, подробные данные пласта и информацию алгоритма, как описано в настоящем документе.
Как указано выше, фиг. 5S иллюстрирует изображение радиолокационного индикатора, на котором представлена начальная точка устройства и концентрические окружности вокруг начальной точки устройства, представляющие расстояние от начальной точки устройства. На фиг. 5S изображение радиолокационного индикатора указывает характеристики пласта как функции от азимута, определенного относительно оси устройства.
По меньшей мере в некоторых примерах реализации изобретения изображение радиолокационного индикатора, проиллюстрированное на фиг. 5S, может представлять указатель азимута, определенного относительно азимута направления перемещения начальной точки устройства. Другими словами, указанный вариант отображения может содержать изображение вида в поперечном сечении вдоль оси устройства, причем угол поперечного сечения связан с азимутом направления перемещения начальной точки устройства. Очевидно, что вдоль оси устройства может быть выполнено множество различных поперечных сечений (то есть, сечений в диапазоне 360 градусов) и, таким образом, возможно получение различных вариантов отображения. Независимо от конкретного азимута изображение радиолокационного индикатора может указывать объект, представляющий устройство, который проходит от начальной точки устройства (в центре) до верха изображения радиолокационного индикатора. В альтернативных вариантах реализации изобретения изображение радиолокационного индикатора может содержать объект, представляющий устройство, который проходит от начальной точки устройства до боковой стороны изображения радиолокационного индикатора вдоль линии, соответствующей углу направления ориентации устройства. В таком случае вид в поперечном сечении вдоль оси устройства, представленный на изображении радиолокационного индикатора, будет откорректирован соответствующим образом.
Кроме того, изображение радиолокационного индикатора может быть интерактивным и обеспечивать возможность выбора отображаемых характеристик пласта с целью представления дополнительных данных. Например, дополнительные данные могут охватывать численное значение относительного угла наклона между направлением ориентации устройства и границей пласта, численное значение относительного азимута между направлением ориентации устройства и границей пласта и (или) численное значение расстояния между начальной точкой устройства и границей пласта. Далее, в некоторых вариантах реализации изобретения изображение радиолокационного индикатора содержит указатель алгоритма инверсии для каждого отображаемого слоя пласта. Такие указатели алгоритма инверсии могут обеспечивать предоставление информации, касающейся конкретного каротажного устройства, частоты и (или) метода инверсии, используемых для представления отображаемых уровней пласта.
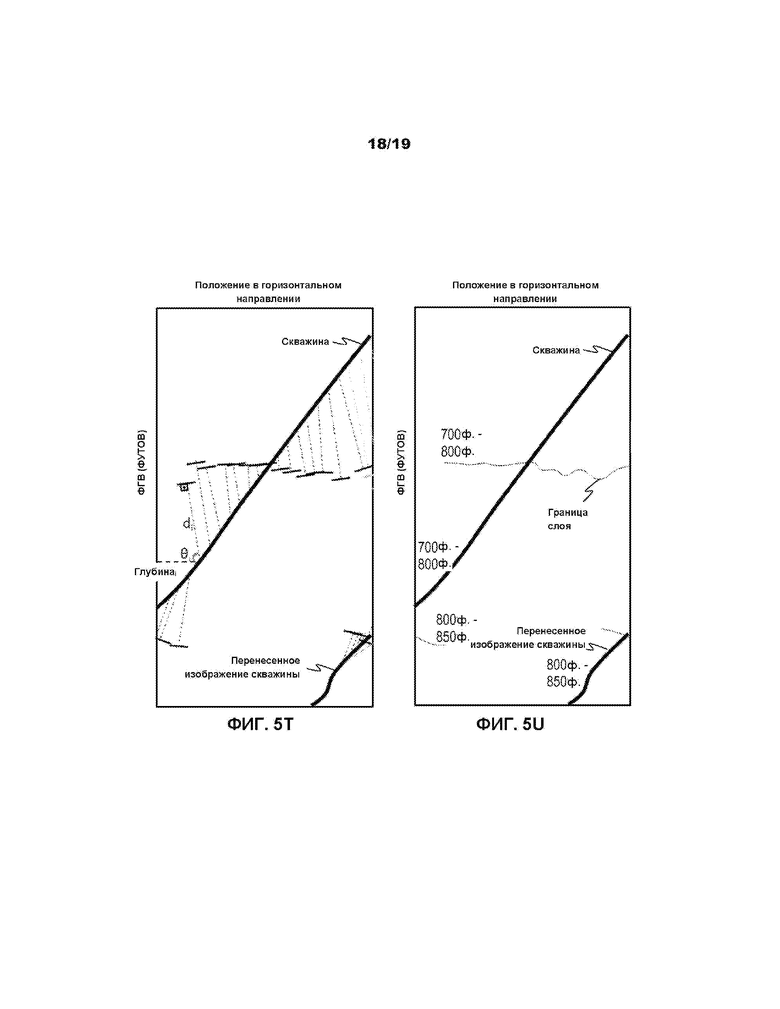
Фиг. 5T и 5U иллюстрируют варианты отображения с переносом изображения, предусматривающие представление траектории скважины как функции от фактической глубины по вертикали (ФГВ) и перенос данных траектории скважины или других данных при выходе за границы изображения. В данном случае перенос означает представление координат таким образом, что положение фигуры всегда остается в пределах рабочей области отображения. Один из конкретных способов переноса предусматривает перемещение линий, выходящих за пределы рабочей области, с правой стороны изображения на левую сторону и наоборот. На фиг. 5T линии, представляющие расстояние (указатели расстояния до ближайшей границы пласта), проходят от траектории ствола скважины и могут использоваться для указания границы пласта. В то же время фиг. 5U иллюстрирует линии, представляющие границу пласта, и данные глубины по вертикали.
Как указано выше, фиг. 5T и 5U иллюстрируют изображения с переносом данных, представляющие траекторию бурения и границы пластов как функции от глубины и положения в горизонтальном направлении, на которых выполняется перенос горизонтального положения отображаемой траектории бурения на противоположную сторону изображения, когда длина траектории бурения в горизонтальном направлении превышает диапазон отображения данных горизонтального положения. В некоторых вариантах реализации изобретения изображение с переносом данных может предусматривать представление указателей расстояния до ближайшей границы пласта для каждого из множества конкретных значений глубины. Далее, изображение с переносом данных может предусматривать отображение отдельной линии, представляющей границу пласта, для каждого указателя расстояния до ближайшей границы пласта. Кроме того, изображение с переносом данных может предусматривать представление указателя относительного угла наклона по меньшей мере для одного из указателей расстояния до ближайшей границы пласта.
В некоторых вариантах реализации изобретения изображение с переносом данных может предусматривать отображение непрерывной линии, представляющей каждую границу пласта. В таком случае отображение указателей расстояния до ближайшей границы пласта может не осуществляться. Далее, некоторые изображения с переносом данных могут предусматривать представление значения глубины по вертикали для каждой границы пласта.
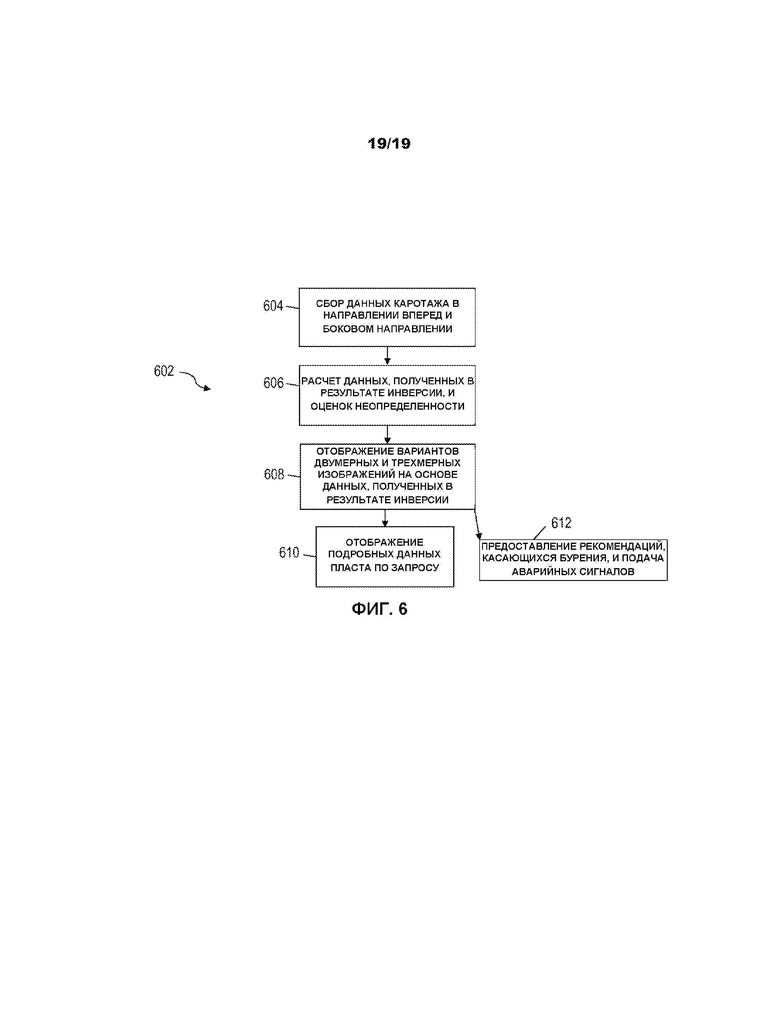
Фиг. 6 иллюстрирует структурную схему способа 602 реализации системы КВБ. Как проиллюстрировано на фигуре, способ 602 включает этап сбора данных каротажа в направлении вперед или боковом направлении (этап 604). На этапе 606 выполняется расчет данных инверсии, и оценок неопределенности. На этапе 608 на основе данных инверсии отображаются варианты двумерных или трехмерных изображений. Варианты отображения, полученные на этапе 608, могут соответствовать любому примеру изображения, проиллюстрированному на фиг. 5A-5U, их комбинациям или модифицированным версиям. В некоторых примерах реализации изобретения одновременно могут представляться различные варианты отображения.
По запросу на этапе 610 отображаются подробные данные пласта. Подробные данные пласта могут представлять собой буквенно-цифровые символы и значения, которые отображаются при выборе конкретной линии, фигуры или интерактивной точки на представленном изображении. На этапе 612 предоставляются рекомендации по бурению или подаются аварийные сигналы. Рекомендации по бурению могут представляться в виде линий или стрелок на изображении, указывающих предлагаемое направление бурения. В то же время аварийный сигнал может представляться в форме звукового сигнала или визуального указателя и отображения соответствующих значений, которые вызвали подачу аварийного сигнала (например, бурение на расстоянии от границы пласта меньшем заданного порога). Подача аварийного сигнала может сопровождаться или не сопровождаться предоставлением рекомендаций по бурению. В некоторых вариантах реализации изобретения способ 602 осуществляется на компьютере, выполняющем программу визуализации данных управления, как описано в настоящем документе. На основе информации, предоставленной в результате реализации способа 602, оператор системы КВБ осуществляет выбор соответствующих команд управления устройством КВБ.
Очевидно, что различные варианты реализации настоящего изобретения, описанные выше, могут осуществляться на основе различных результатов измерений в направлении вперед или боковом направления относительно долота без выхода за пределы настоящего изобретения. Кроме того, представленные варианты отображения являются только примерами возможных вариантов отображения, реализованных в соответствии с сущностью настоящего изобретения, которая не ограничивается конкретными деталями указанных примеров реализации изобретения. Для специалиста в данной области техники после тщательного ознакомления с представленным выше описанием представительных вариантов реализации изобретения очевидно, что в конкретные варианты реализации изобретения могут быть внесены различные модификации, осуществлено дополнение, замена, исключение и выполнены другие изменения, которые находятся в пределах сущности настоящего изобретения.
Группа изобретений относится к области геофизической разведки, в частности к оценке, моделированию и прогнозированию характеристик пласта методом каротажа. Предложены способы визуализации данных каротажа во время бурения, система визуализации данных каротажа и машиночитаемый носитель для обеспечения реализации способов. Способ визуализации данных каротажа во время бурения включает этап получения данных измерений, касающихся пласта и выполненных устройством в направлении вперед или боковом направлении относительно бурового долота. Указанный способ также включает этап формирования изображения пласта с использованием полученных данных. Предусмотрены различные изображения и функции изображений. Оператору предоставляется возможность выбора одного или более изображений и (или) функций изображений для принятия решений, касающихся управления системой каротажа во время бурения. 6 н. и 41 з.п. ф-лы, 6 ил.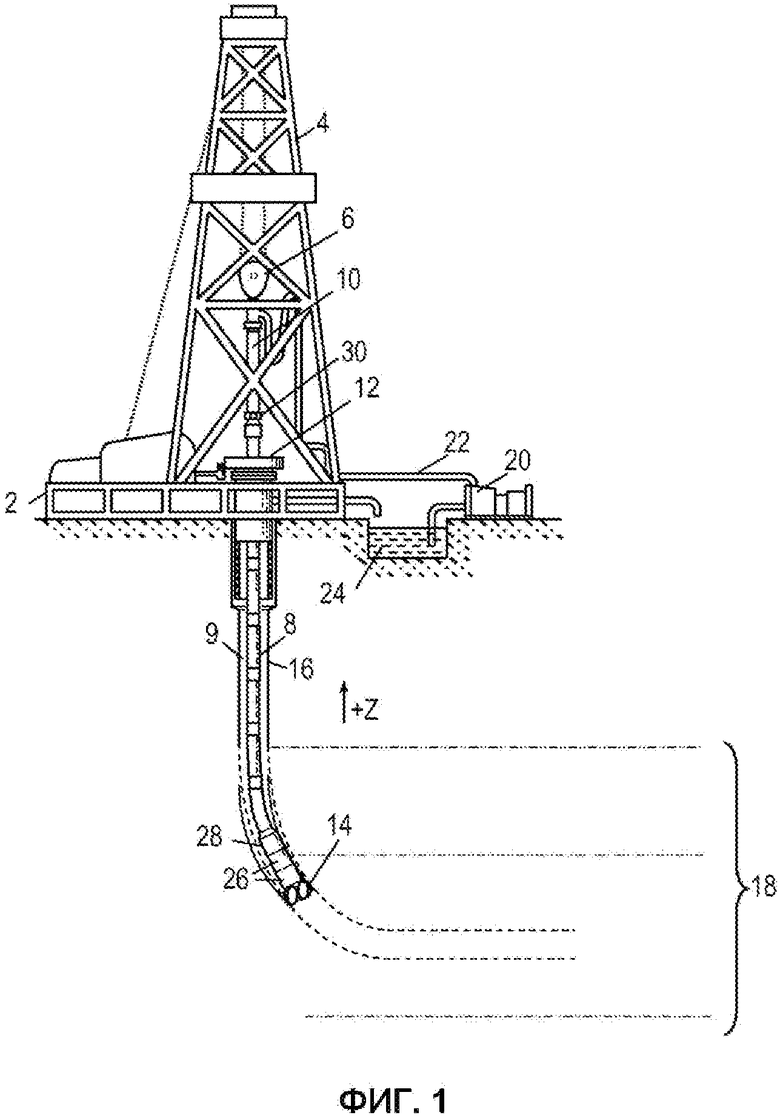
1. Cпособ визуализации данных каротажа во время бурения, включающий:
получение данных измерений, касающихся пласта, выполненных определенным устройством, в направлении вперед или боковом направлении относительно долота;
формирование двумерного (2D) изображения пласта с использованием полученных данных, причем указанное двумерное изображение содержит характеристики пласта в заданном направлении от начальной точки устройства как функции от глубины,
причем указанное изображение содержит наклонную линию, представляющую границу пласта между двумя слоями пласта, расположенную на определенной глубине, причем угол наклона линии соответствует указателю относительного угла наклона между заданным направлением и указанной границей пласта.
2. Способ по п. 1, отличающийся тем, что указанное заданное направление соответствует направлению вперед относительно долота от указанной начальной точки.
3. Способ по п. 1, отличающийся тем, что заданное направление соответствует поперечному направлению относительно долота от начальной точки.
4. Способ по п. 1, отличающийся тем, что изображение содержит прямую линию, представляющую границу пласта между двумя слоями пласта, расположенную на определенной глубине, причем для данного значения глубины в дополнение к прямой линии отображают указатель относительного угла наклона, представляющий угол между заданным направлением и указанной границей пласта.
5. Способ по п. 4, отличающийся тем, что указатель относительного угла наклона представляет собой стрелку, начало которой размещают в начальной точке устройства или вблизи начальной точки устройства, причем угол стрелки относительно направления перемещения начальной точки представляет данные относительного угла наклона.
6. Способ по п. 1, отличающийся тем, что указанное изображение содержит данные удельного сопротивления или магнитной проницаемости пласта.
7. Способ по любому из пп. 1-6, отличающийся тем, что изображение содержит конкретный указатель относительного угла наклона отображаемой границы пласта для каждого значения глубины.
8. Способ по любому из пп. 1-6, отличающийся тем, что изображение содержит данные характеристик пласта, отображаемые с использованием цвета, причем различные цвета представляют различные значения характеристик пласта.
9. Способ по любому из пп. 1-6, отличающийся тем, что изображение содержит данные характеристик пласта, отображаемые с использованием структуры, причем различные плотности структуры представляют различные значения характеристик пласта.
10. Способ по п. 9, отличающийся тем, что указанную структуру масштабируют относительно стандартной структуры по меньшей мере в одном направлении с целью представления анизотропных значений.
11. Способ визуализации данных каротажа во время бурения, включающий:
получение данных измерений, касающихся пласта и выполненных устройством, в направлении вперед или боковом направлении относительно долота;
формирование двумерного (2D) изображения пласта с использованием полученных данных, причем указанное двумерное изображение содержит отдельный указатель расстояния до границы пласта для каждого из множества конкретных значений глубины,
причем изображение содержит линию, представляющую границу пласта по меньшей мере для одного из указателей расстояния до границы пласта, и угол линии, представляющей границу пласта, соответствует значению угла наклона относительно направления перемещения начальной точки устройства.
12. Способ по п. 11, отличающийся тем, что изображение содержит центральную линию, представляющую положение начальной точки устройства как функции от глубины.
13. Способ по п. 12, отличающийся тем, что каждый указатель расстояния до границы пласта представляют стрелкой, проходящей от центральной линии до ближайшей границы пласта.
14. Способ по п. 12, отличающийся тем, что каждый указатель расстояния до границы пласта представляют полосой, проходящей по меньшей мере от центральной линии до границы пласта.
15. Способ по п. 14, отличающийся тем, что каждая полоса содержит цвет или структуру с целью представления данных удельного сопротивления или магнитной проницаемости пласта.
16. Способ по п. 10, отличающийся тем, что изображение содержит указатель азимута по меньшей мере для одного из указателей расстояния до границы пласта с целью представления угла между азимутом границы пласта и азимутом направления перемещения начальной точки устройства.
17. Способ по п. 16, отличающийся тем, что указатель азимута отображают на границе пласта или вблизи границы пласта, связанной с указателем расстояния до границы пласта.
18. Способ по п. 16, отличающийся тем, что указатель азимута отображают вдоль боковой стороны изображения для глубины, соответствующей указателю расстояния до границы пласта.
19. Способ по п. 16, отличающийся тем, что указатель азимута изображают в виде радиальной линии внутри окружности, представляющей угол между азимутом границы пласта и азимутом направления перемещения начальной точки устройства.
20. Способ по любому из пп. 11-19, отличающийся тем, что по меньшей мере один из отображаемых указателей расстояния до границы пласта является частично прозрачным для указания уровня неопределенности.
21. Способ по любому из пп. 11-19, отличающийся тем, что изображение обеспечивает возможность выбора указателя расстояния до границы пласта для представления дополнительных данных указателя расстояния до границы пласта.
22. Способ по п. 21, отличающийся тем, что дополнительные данные содержат по меньшей мере одно значение, выбранное из группы, включающей: численное значение относительного угла наклона между направлением ориентации устройства и границей пласта; численное значение относительного азимута между направлением ориентации устройства и границей пласта и численное значение расстояния между начальной точкой устройства и границей пласта.
23. Способ по любому из пп. 11-19, отличающийся тем, что изображение предусматривает представление области неопределенности по меньшей мере для одного из указателей расстояния до границы пласта, причем область неопределенности соответствует диапазону возможных значений расстояния и направления соответствующего указателя расстояния до границы пласта.
24. Способ по п. 23, отличающийся тем, что область неопределенности представляет собой фигуру и соответствующий указатель расстояния до границы пласта направлен к центру фигуры.
25. Способ по любому из пп. 11-19, отличающийся тем, что изображение содержит два набора указателей расстояния до границы пласта, соответствующих двум различным наборам данных, полученным устройством.
26. Способ по любому из пп. 11-19, отличающийся тем, что изображение содержит множество указателей расстояния до границы пласта, соответствующих одному значению глубины, причем каждый из указанного множества указателей расстояния до границы пласта связан с различными границами пластов.
27. Способ по любому из пп. 11-19, отличающийся тем, что изображение содержит только указатели расстояния до ближайшей границы пласта.
28. Способ визуализации данных каротажа во время бурения, включающий:
получение данных измерений, касающихся пласта и выполненных устройством в направлении вперед или боковом направлении относительно долота;
формирование изображения пласта в виде экрана радиолокационного индикатора на основе полученных данных, причем на экране радиолокационного индикатора отображают начальную точку устройства и концентрические окружности вокруг начальной точки устройства для представления расстояния от начальной точки устройства и на изображении в виде экрана радиолокационного индикатора отображают объекты, представляющие характеристики пласта как функции от азимута относительно оси устройства;
причем изображение в виде экрана радиолокационного индикатора содержит указатель алгоритма инверсии по меньшей мере для одного из отображаемых объектов, представляющих характеристики пласта.
29. Способ по п. 28, отличающийся тем, что изображение в виде экрана радиолокационного индикатора содержит указатель азимута, определенный относительно начальной точки устройства.
30. Способ по п. 28, отличающийся тем, что изображение в виде экрана радиолокационного индикатора содержит объект, представляющий устройство, который проходит от начальной точки устройства до верха изображения в виде экрана радиолокационного индикатора.
31. Способ по п. 28, отличающийся тем, что изображение в виде экрана радиолокационного индикатора содержит объект, представляющий устройство, который проходит от начальной точки устройства до боковой стороны изображения в виде экрана радиолокационного индикатора вдоль линии, соответствующей углу направления ориентации устройства.
32. Способ по любому из пп. 28-31, отличающийся тем, что изображение в виде экрана радиолокационного индикатора обеспечивает возможность выбора отображаемого объекта, представляющего характеристики пласта, для указания дополнительных данных.
33. Способ по п. 32, отличающийся тем, что дополнительные данные содержат определенное значение, выбранное из группы, включающей: численное значение относительного угла наклона между направлением ориентации устройства и границей пласта; численное значение относительного азимута между направлением ориентации устройства и границей пласта; численное значение расстояния между начальной точкой устройства и границей пласта и численное значение удельного сопротивления или магнитной проницаемости пласта на месте размещения выбранного объекта, представляющего характеристики пласта, или вблизи указанного объекта.
34. Способ по любому из пп. 28-31, отличающийся тем, что изображение в виде экрана радиолокационного индикатора содержит цвет или структуру с целью представления данных удельного сопротивления или магнитной проницаемости по меньшей мере для одного из отображаемых объектов, представляющих характеристики пласта.
35. Способ визуализации данных каротажа во время бурения, включающий:
получение данных измерений, касающихся пласта и выполненных устройством в направлении вперед или боковом направлении относительно долота;
формирование изображения пласта на основе полученных данных, причем изображение содержит траекторию бурения и границы пластов как функции от глубины и положения в горизонтальном направлении и выполняют перенос горизонтального положения отображаемой траектории бурения на противоположную сторону изображения, когда длина траектории бурения в горизонтальном направлении превышает диапазон отображения данных в горизонтальном направлении.
36. Способ по п. 35, отличающийся тем, что изображение содержит указатели расстояния до границы пласта для каждого из множества конкретных значений глубины.
37. Способ по п. 36, отличающийся тем, что изображение содержит отдельную линию границы пласта для каждого указателя расстояния до границы пласта.
38. Способ по п. 36, отличающийся тем, что изображение содержит указатель относительного угла наклона по меньшей мере для одного из указателей расстояния до границы пласта.
39. Способ по п. 35, отличающийся тем, что изображение содержит непрерывную линию, соответствующую каждой границе пласта.
40. Способ по п. 39, отличающийся тем, что изображение содержит численное значение глубины по вертикали каждой отображаемой границы пласта или вблизи каждой отображаемой границы пласта.
41. Машиночитаемое устройство хранения, содержащее записанные на указанном устройстве команды, при исполнении которых одним или более процессором компьютера осуществляется выполнение операций, обеспечивающих реализацию способа визуализации данных каротажа во время бурения, указанного в любом из пп. 1- 40.
42. Машиночитаемое устройство хранения по п. 41, отличающееся тем, что при исполнении команд одним или более процессором компьютера в ответ на запрос пользователя осуществляется переход между различными изображениями.
43. Машиночитаемое устройство хранения по п. 41, отличающееся тем, что при исполнении команд одним или более процессором компьютера в ответ на запрос пользователя осуществляется отображение нескольких различных изображений.
44. Машиночитаемое устройство хранения по п. 41, отличающееся тем, что при исполнении команд одним или более процессором компьютера в ответ на запрос пользователя осуществляется включение или выключение различных функций отображения.
45. Система визуализации данных каротажа во время бурения, содержащая:
один или более процессор;
интерфейс пользователя, функционально связанный с одним или более процессором; и
машиночитаемое устройство хранения, содержащее записанную на указанном устройстве программу визуализации данных управления, при исполнении которой одним или более процессором осуществляется выполнение указанной системой операций, обеспечивающих реализацию способа визуализации данных каротажа во время бурения, указанного в любом из пп. 1-40.
46. Система по п. 45, отличающаяся тем, что указанная система содержит устройство получения данных измерений в направлении вперед или боковом направлении относительно долота.
47. Система по п. 45, отличающаяся тем, что указанная система содержит устройство ввода, функционально связанное с интерфейсом пользователя, причем устройство ввода обеспечивает ввод данных пользователя для программы визуализации данных управления с целью перехода между различными изображениями, представления нескольких изображений, включения различных функций отображения или выключения различных функций отображения.
| WO 2011149742 A2, 01.12.2011 | |||
| US 2012298420 A1, 29.11.2012 | |||
| US 20120191432 А1, 26.07.2012 | |||
| US 8433518 B2, 30.04.2013 | |||
| US 7366616 B2, 29.04.2008 | |||
| Поршневой измеритель для продажи жидкостей, например, пива, кваса и т.п. | 1940 |
|
SU61441A1 |
| УСТРОЙСТВО И СПОСОБ СЕЙСМИЧЕСКОГО ИССЛЕДОВАНИЯ ПОДЗЕМНОЙ СТРУКТУРЫ | 2008 |
|
RU2497152C2 |
| US 2013027044 A1, 31.01.2013. | |||

