10 контроля глубины и скорости. Подъемник имеет датчик 11 положения поворотного корпуса гидронасоса, микроконтроллер 12 с буферным блоком 13, электродвигатель 14 с усилителем 15 мощности и редуктором 16. Подъемник также имеет генераторы 17 и 18 импульсов, элементы И 19, 20, 22, 23, элементы ИЛИ 21, 24. Линейное движение кабеля 5 преобразуется во вращательное движение датчика 9, информация о глубине поступает в микроконтроллер 12. При достижении заданного значения скорости на данной глубине погружения прибора на микроконтроллере появится сигнал, равный нулю. При этом электродвигатель 14 остановится. Угол наклона корпуса в этот момент задает производительность ГН 1, которая обеспечивает заданную скорость движению кабеля 5. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Каротажный подъемник | 1987 |
|
SU1506095A1 |
| Устройство для управления каротажным подъемником | 1988 |
|
SU1548420A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| КАРОТАЖНЫЙ ПОДЪЕМНИК | 2001 |
|
RU2179636C1 |
| Каротажный подъемник | 1989 |
|
SU1654557A1 |
| Спуско-подъемное устройство каротажной станции | 1988 |
|
SU1544960A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ И/ИЛИ РАЗМАТЫВАНИЯ ГИБКОГО ДЛИННОМЕРНОГО МАТЕРИАЛА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ НАМОТКИ ИЛИ РАЗМАТЫВАНИЯ | 1992 |
|
RU2015764C1 |
| Каротажная станция | 1988 |
|
SU1749867A1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2090751C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
Изобретение относится к промысловой геофизике. Цель - повышение . точности поддержания и плавности ре- гулирования заданной скорости движения скважинного прибора. Подъемник содержит гидронасос (ГН) t перемен- . ной производительности с поворотным корпусом, связанный с приводным двигателем 2 и гидромотором 3, соединенным с барабаном 4. Подъемник также содержит $сабель 5 со скважин- ным прибором 6, блок 7 управления, включающий пульт 8 управления и датчик 9 глубины и скорости, Последний подключен к первому входу блока СО 4аь 4: 00 о 00 
1
Изобретение относится к промысловой геофизике, в частности к устройствам для спуска и подъема сква- жинных приборов.
Цель изобретения - повышение точности поддержания и плавности регулирования заданной скорости движения скважинного прибора.
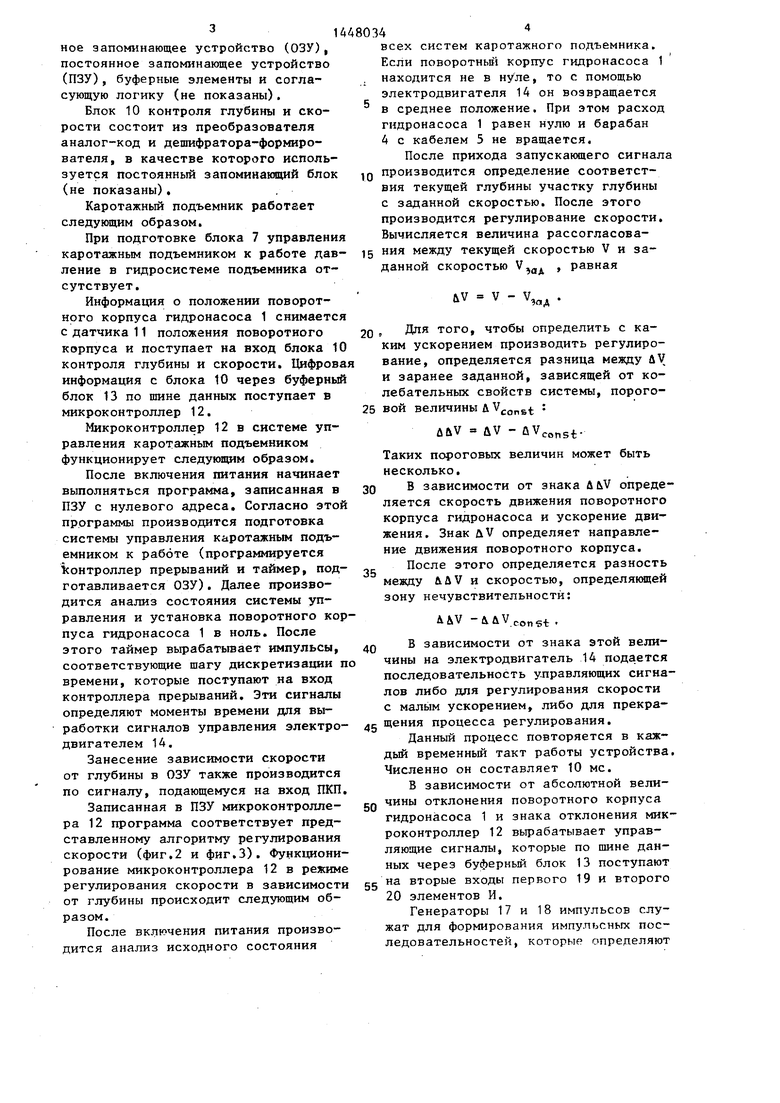
На фиг.1 изображена структурная схема каротажного подъемника; на фиг.2 и фиг.З - алгоритм рСегулирова- ния скорости движения скважинного прибора.
Каротажньй подъемник содержит гид ронасос 1 переменной производительности с поворотным корпусом, приводной двигатель 2, гидромотор 3 вал которого механически связан с барабаном 4, на который намотан каротаж- ный кабель 5 со скважинным прибором 6 и блок 7 управления. Блок 7 управления включает пульт 8 управления, датчик 9 глубины и скорости, выход которого связан с первым входом бло- ка 10 контроля глубины и скорости датчик 11 положения поворотного корпуса гидронасоса, микроконтроллер 12 с буферным блоком 13, электродвигатель 14 с усилителем 15 мощности, редуктор 16, первый 17 и второй 18 генераторы импульсов, первый 19 и второй 20 элементы И, первый элемент ИЛИ 21, третий 22 и четвертый 23 элементы И, второй элемент ИЛИ 24. Выход второго элемента ИЛИ 24 подключен к входу усилителя 15 мощности первый вйод второго элемента ИЛИ 24 связан с выходом третьего элемента
И 22, второй вход второго элемента ИЛИ 24 связан с выходом четвертого элемента И 23, вторые входы третьего 22 и четвертого 23 элементов И связаны с выходом первого элемента ИЛИ 21, первые входы третьего 22 и четвертого 23 элементов И подключены к третьему и четвертому информационным выходам буферного блока 13 микроконтроллера 12, первый вход первого элемента ИЛИ 21 связан с выходом первого элемента И 19, второй вход первого элемента ИЛИ 21 связан с выходом второго элемента И 20, первый вход которого подключен к выходу второго генератора 18 импульсов, .второй вход второго элемента И 20 подключен к второму информационному выходу буферного блока 13 микроконтроллера 12э первый вход первого элемента И 19 подключен к выходу первого генератора 17 импульсов, второй вход первого элемента И 19 связан с первым информационным выходом буферного блока 13 микроконтроллера 12, третьи входы первого 19 и второго 20 элементов И связаны с пятым информационным выходом буферного блока 13.
Выход датчика 11 положения поворотного корпуса гидронасоса под- ключен к второму входу блока 10 контроля глубины и скорости, выход которого через буферный блок 13 связан с шиной данных микроконтроллера 12. Микроконтроллер 12 содержит центральньш процессорньй элемент (ЦПЭ), программируемый контроллер прерываний (ПКП), таймер, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), буферные элементы и согласующую логику (не показаны).
Блок 10 контроля глубины и скорости состоит из преобразователя аналог-код и дещифратора-формиро- вателя, в качестве которого используется постоянный запоминаклций блок (не показаны),
Каротажный подъемник работает следующим образом.
При подготовке блока 7 управления каротажным подъемником к работе давление в гидросистеме подъемника отсутствует.
Информация о положении поворотного корпуса гидронасоса 1 снимается с датчика 11 положения поворотного корпуса и поступает на вход блока 10 контроля глубины и скорости. Цифрова информация с блока 10 через буферный блок 13 по шине данных поступает в микроконтроллер 12.
Микроконтроллер 12 в системе управления каротажным подъемником функционирует следующим образом.
После включения питания начинает выполняться программа, записанная в ПЗУ с нулевого адреса. Согласно этой программы производится подготовка системы управления каротажным подъемником к работе (программируется 1сонтроллер прерываний и таймер, подготавливается ОЗУ). Далее производится анализ состояния системы управления и установка поворотного корпуса гидронасоса 1 в ноль. После этого таймер вьфабатьгаает импульсы, соответствующие шагу дискретизации п времени, которые поступают на вход контроллера прерываний. Эти сигналы определяют моменты времени для выработки сигналов управления электродвигателем 14,
Занесение зависимости скорости от глубины в ОЗУ также производится по сигналу, подающемуся на вход ПКП.
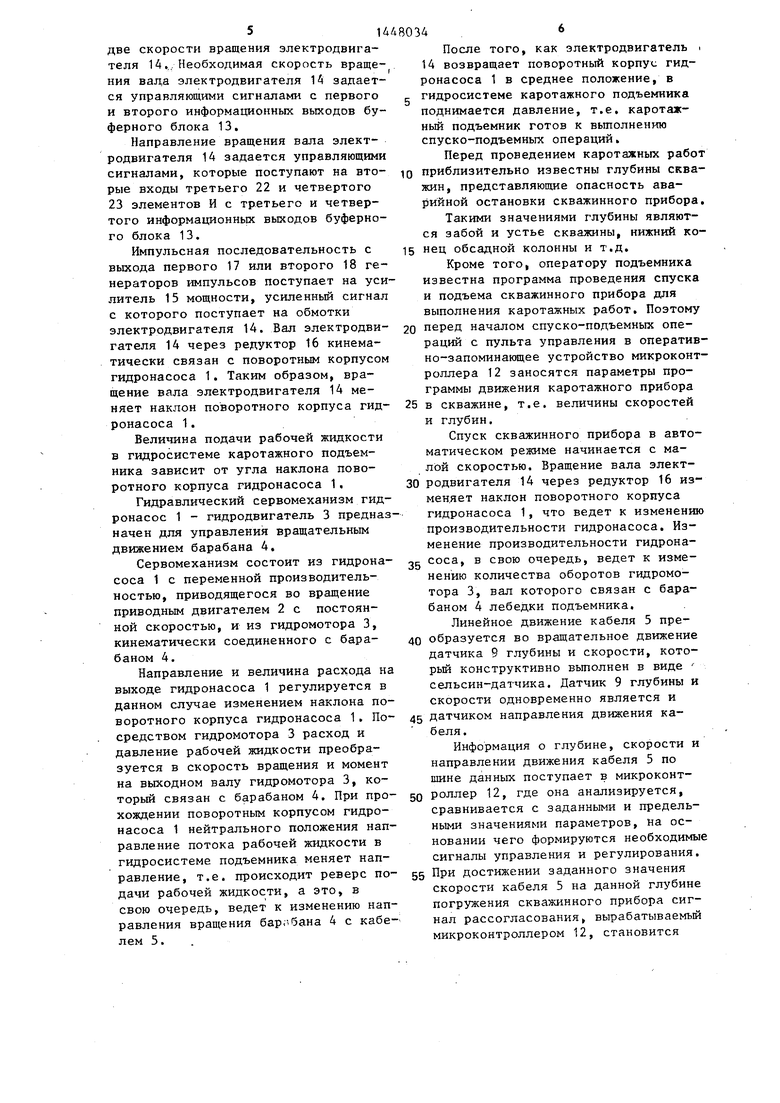
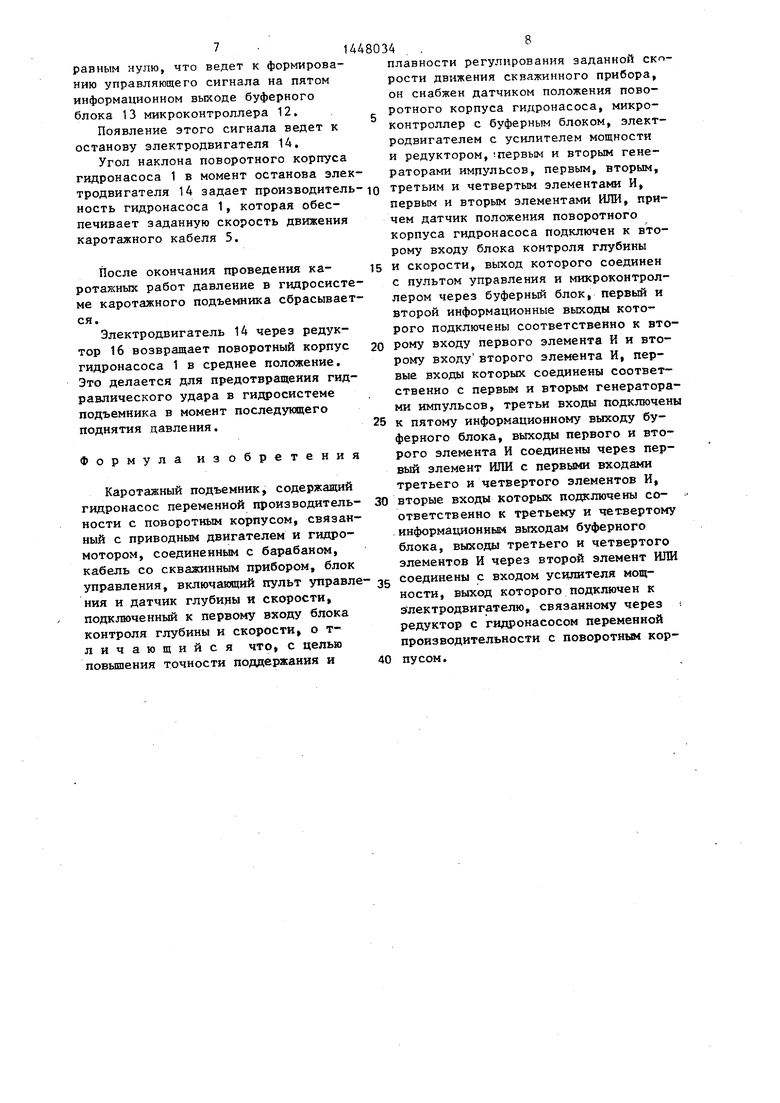
Записанная в ПЗУ микроконтроллера 12 программа соответствует представленному алгоритму регулирования скорости (фиг.2 и фиг.З). Функционирование микроконтроллера 12 в режиме регулирования скорости в зависимости от глубины происходит следующим образом.
После включения питания производится анализ исходного состояния
всех систем каротажного подъемника. Если поворотньй корпус гидронасоса 1 находится не в нуле, то с помощью электродвигателя 14 он возвращается в среднее положение. При этом расход гидронасоса 1 равен нулю и барабан 4 с кабелем 5 не вращается.
После прихода запускающего сигнала производится определение соответствия текущей глубины участку глубины с заданной скоростью. После этого производится регулирование скорости. Вычисляется величина рассогласова- ния между текущей скоростью V и за
данной скоростью V
МА
равная
liV
V - V.
Эад
20 , Для того, чтобы определить с каким ускорением производить регулирование, определяется разница между uV и заранее заданной, зависящей от колебательных свойств системы, порого25 вой величины Д V :
ubv uV - aVeonstТаких пороговых величин может быть несколько.
30 В зависимости от знака u&V определяется скорость движения поворотного корпуса гидронасоса и ускорение движения. Знак uV определяет направление движения поворотного корпуса.
После этого определяется разность между ЛйУ и скоростью, определякмцей зону нечувствительности:
35
40
45
A&V -&uVcon6-fc.
В зависимости от знака этой величины на электродвигатель 14 подается последовательность управляющих сигналов либо для регулирования скорости с малым ускорением, либо для прекращения процесса регулирования.
Данный процесс повторяется в каждый временный такт работы устройства Численно он составляет 10 мс.
В зависимости от абсолютной величины отклонения поворотного корпуса гидронасоса 1 и знака отклонения микроконтроллер 12 вьфабатывает управляющие сигналы, которые по шине данных через буферный блок 13 поступают gg на вторые входы первого 19 и второго 20 элементов И.
Генераторы 17 и 18 импульсов служат для формирования импульсных последовательностей, которые определяют
50
51
две скорости вращения электродвигателя 14.,, Необходимая скорость вращения вада электродвигателя 14 задается управляющими сигналами с первого и второго информационных выходов буферного блока 13.
Направление вращения вала электродвигателя 14 задается управляющими сигналами, которые поступают на вторые входы третьего 22 и четвертого 23 элементов И с третьего и четвертого информационньрс выходов буферного блока 13.
Импульсная последовательность с выхода первого 17 или второго 18 генераторов импульсов поступает на усилитель 15 мощности, усиленньш сигнал с которого поступает на обмотки электродвигателя 14. Вал электродвигателя 14 через редуктор 16 кинематически связан с поворотным корпусом гидронасоса 1. Таким образом, вращение вала электродвигателя 14 меняет наклон поворотного корпуса гидронасоса 1.
Величина подачи рабочей жидкости в гидросистеме каротажного подъемника зависит от угла наклона поворотного корпуса гидронасоса 1.
Гидравлический сервомеханизм гидронасос 1 - гидродвигатель 3 предназначен для управления вращательным движением барабана 4.
Сервомеханизм состоит из гидронасоса 1 с переменной производительностью, приводящегося во вращение приводным двигателем 2 с постоянной скоростью, и из гидромотора 3, кинематически соединенного с барабаном 4.
Направление и величина расхода на выходе гидронасоса 1 регулируется в данном случае изменением наклона поворотного корпуса гидронасоса 1. Посредством гидромотора 3 расход и давление рабочей жидкости преобразуется в скорость вращения и момент на выходном валу гидромотора 3, который связан с барабаном 4. При прохождении поворотным корпусом гидронасоса 1 нейтрального положения направление потока рабочей жидкости в гидросистеме подъемника меняет направление, т.е. происходит реверс подачи рабочей жидкости, а это, в свою очередь, ведет к изменению направления вращения барабана 4 с кабелем 5.
После того, как электродвигатель i 14 возвращает поворотный корпух: гидронасоса 1 в среднее положение, в
гидросистеме каротажного подъемника поднимается давление, т.е. каротажный подъемник готов к вьтолнению спуско-подъемных операций.
Перед проведением каротажных работ
приблизительно известны глубины скважин, представляющие опасность аварийной остановки скважинного прибора. Такими значениями глубины являются забой и устье скважины, нижний конец обсадной колонны и т.д.
Кроме того, оператору подъемника известна программа проведения спуска и подъема скважинного прибора для выполнения каротажных работ. Поэтому перед началом спуско-подъемных операций с пульта управления в оперативно-запоминающее устройство микроконтроллера 12 заносятся параметры программы движения каротажного прибора в скважине, т.е. величины скоростей и глубин.
Спуск скважинного прибора в автоматическом режиме начинается с малой скоростью. Вращение вала электродвигателя 14 через редуктор 16 из- мен.яет наклон поворотного корпуса гидронасоса 1, что ведет к изменению производительности гидронасоса. Изменение производительности гидронасоса, в свою очередь, ведет к изменению количества оборотов гидромотора 3, вал которого связан с барабаном 4 лебедки подъемника.
Линейное движение кабеля 5 преобразуется во вращательное движение датчика 9 глубины и скорости, который конструктивно вьтолнен в виде сельсин-датчика. Датчик 9 глубины и скорости одновременно является и
датчиком направления движения кабеля .
Информация о глубине, скорости и направлении движения кабеля 5 по пине данных поступает в микроконтроллер 12, где она анализируется, сравнивается с заданными и предельными значениями параметров, на основании чего формируются необходимые сигналы управления и регулирования.
При достижении заданного значения скорости кабеля 5 на данной глубине погружения скважинного прибора сигнал рассогласования, вырабатываемый микроконтроллером 12, становится
равным нулю, что ведет к формированию управляющего сигнала на пятом информационном выходе буферного блока 13 микроконтроллера 12.
Появление этого сигнала ведет к останову электродвигателя 14,
Угол наклона поворотного корпуса гидронасоса 1 в момент останова электродвигателя 14 задает производитель-ig третьим и четвертым элементами И, ность гидронасоса 1, которая обеспечивает заданную скорость движения каротажного кабеля 5.
первым и вторым элементами ИЛИ, пр чем датчик положения поворотного корпуса гидронасоса подключен к вт рому входу блока контроля глубины
После окончания проведения каротажных работ давление в гидросистеме каротажного подъемника сбрасывается.
Электродвигатель 14 через редуктор 16 возвращает поворотный корпус гидронасоса 1 в среднее положение. Это делается для предотвращения гидравлического удара в гидросистеме подъемника в момент последующего поднятия давления.
Формула изобретения
Каротажный подъемник, содержащий гидронасос переменной производительности с поворотным корпусом, связанный с приводным двигателем и гидромотором, соединенным с барабаном, кабель со скважинным прибором, блок
управления, включаклций пульт управле- 35 соединены с входом усилителя мощния и датчик глубины и скорости,
подключенный к первому входу блока
контроля глубины и скорости, о тличающийся что, с целью
повышения точности поддержания и 40
ности, выход которого подключен к э лектродвигателю, связанному через редуктор с гидронасосом переменной производительности с поворотньм ко пусом.
плавности регулирования заданной скорости движения скважинного прибора, он снабжен датчиком положения поворотного корпуса гидронасоса, микроконтроллер с буферным блоком, электродвигателем с усилителем мощности и редуктором,первым и вторым генераторами импульсов, первым, вторым.
третьим и четвертым элементами И,
первым и вторым элементами ИЛИ, причем датчик положения поворотного корпуса гидронасоса подключен к второму входу блока контроля глубины
и скорости, вькод которого соединен с пультом управления и микроконтроллером через буферный блок, первый и второй информационные выходы которого подключены соответственно к второму входу первого элемента И и второму входу второго элемента И, первые входа которых соединены соответственно с первым и вторым генераторами импульсов, третьи входы подключены
к пятому информационному выходу буферного блока, выходы первого и второго элемента И соединены через первый элемент ИЛИ с первыми входами третьего и четвертого элементов И,
вторые входы которых подключены соответственно к третьему и четвертому информациоиньм выходам буферного блока, выходы третьего и четвертого элементов И через второй элемент ИЛИ
ности, выход которого подключен к э лектродвигателю, связанному через редуктор с гидронасосом переменной производительности с поворотньм корпусом.
Apl yifMtf eoeiaternemi mti io Mioto уюеамю
JJ tfHit
ЩмаЯкле/а давЬммк ещувем/ на yvecmxe
скщюсяш
Ofmenotfiie вЛоитем
| Система управления скважинного прибора при каротаже | 1978 |
|
SU868055A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Октябрьский Г | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
