Изобретение относится к системам прицеливания оружия, в которых расстояние до цели измеряется с помощью лазерного дальномера, и может быть использовано в прицелах огнестрельного или другого дистанционно поражающего оружия.
Известна оптическая система определения координат объекта, описанная в патенте РФ на изобретение №2247941, МПК G01C 3/00, G02B 23/08, F41G 3/06, опубликованном 10.03.2005 г. Оптическая система содержит лазерный дальномер, верхнее подвижное плоское зеркало, нижнее плоское зеркало, устройство съема азимута, блок управления, горизонтирующее устройство, индикатор для отображения снимаемой информации и обеспечивает определение азимута и угла места линии визирования, а также измерение расстояния до цели. Полученные данные могут быть использованы стрелком для прицеливания оружия. Недостатком этой системы является необходимость ввода информации в прицел вручную.
Наиболее близким аналогом заявляемого технического решения является система прицеливания огнестрельного оружия с дальномером и метод наведения на цель, описанные в патенте US №2015108215, МПК F41G 3/06, G01S 17/02, G01S 17/88, опубликованном 23.04.2015 г. Огнестрельная прицельная система с дальномером содержит систему формирования изображения, дисплей, пульт управления, устройство слежения за целью, лазерный дальномер, состоящий из последовательно установленных лазера, управляемого зеркала и приемника излучения, процессор стрельбы и механизм выстрела. Система формирования изображения установлена так, что ее выход связан с входом дисплея. Пульт управления расположен так, что первый его выход связан с первым входом устройства слежения за целью, причем пульт управления и устройство слежения за целью связаны с лазерным дальномером так, что второй выход пульта управления присоединен к входу лазера, а выход устройства слежения за целью связан с управляемым зеркалом, которое оптически связано с приемником излучения лазерного дальномера, а выход приемника излучения присоединен ко второму входу устройства слежения за целью. Лазерный дальномер связан с процессором стрельбы, а выход процессора стрельбы присоединен к входу механизма выстрела.
При наблюдении изображения участка местности возможно использование, по меньшей мере, одного признака, характеризующего цель: перемещение, форма, наличие вспышки выстрела, а также особенности цели, выявленные при наблюдении в инфракрасном диапазоне. С учетом этих признаков, а также измеренного расстояния до цели может быть откорректирована точка прицеливания оружия при участии стрелка, который идентифицирует цель и принимает решение о точке прицеливания и произведении выстрела.
Задачей, на решение которой направлено заявляемое изобретение, является повышение эксплуатационных характеристик системы прицеливания оружия с лазерным дальномером.
Технический результат заключается в создании системы прицеливания оружия с лазерным дальномером с автоматизированным определением типа цели, предъявлением соответствующей информации пользователю и обеспечением возможности автоматического выбора точки прицеливания.
Это достигается тем, что в систему прицеливания оружия с лазерным дальномером, содержащую систему формирования изображения, дисплей, установленный так, что его первый вход связан с выходом системы формирования изображения, пульт управления, устройство слежения за целью, расположенное так, что первый его вход связан с первым выходом пульта управления, лазерный дальномер, состоящий из последовательно установленных лазера, управляемого зеркала и приемника излучения, причем пульт управления и устройство слежения за целью связаны с лазерным дальномером так, что второй выход пульта управления присоединен к входу лазера, а выход устройства слежения за целью связан с управляемым зеркалом, которое оптически связано с приемником излучения лазерного дальномера, а выход приемника излучения присоединен ко второму входу устройства слежения за целью, а также процессор стрельбы, установленный так, что первый его вход связан с третьим выходом пульта управления, а второй вход процессора стрельбы связан со вторым выходом приемника излучения лазерного дальномера, и механизм выстрела, вход которого присоединен к выходу процессора стрельбы, в отличие от известной, дополнительно установлен датчик углов поворота управляемого зеркала, вход которого связан с управляемым зеркалом, введены модуль кадра, модуль анализа и модуль образов, установленные так, что выход датчика углов поворота зеркала связан с первым входом модуля кадра, ко второму входу которого присоединен третий выход приемника излучения лазерного дальномера, выход модуля кадра связан с первым входом модуля анализа, ко второму входу которого присоединен выход модуля образов, причем первый выход модуля анализа связан с третьим входом процессора стрельбы, а второй выход модуля анализа присоединен ко второму входу дисплея.
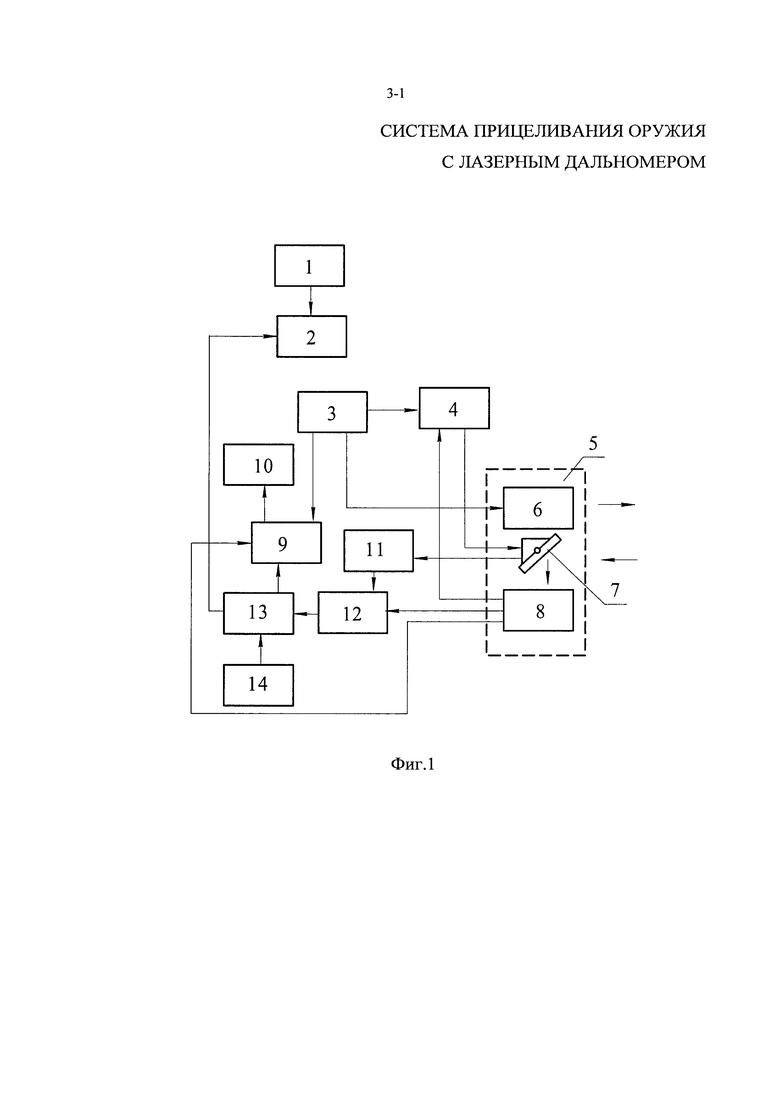
На фиг. 1 изображена функциональная схема системы прицеливания оружия с лазерным дальномером. На фиг. 2 проиллюстрирована возможность формирования образов различных целей.
Система прицеливания оружия с лазерным дальномером (фиг. 1) содержит систему формирования изображения 1, дисплей 2, пульт управления 3, устройство слежения за целью 4, лазерный дальномер 5, состоящий из лазера 6, управляемого зеркала 7, приемника излучения 8, и содержащий прицельную марку и связанную с ней визирную ось лазерного дальномера 5, процессор стрельбы 9, механизм выстрела 10, датчик 11 углов поворота управляемого зеркала 7, модуль кадра 12, модуль анализа 13 и модуль образов 14. Система формирования изображения 1 установлена так, что выход ее связан со входом дисплея 2. Пульт управления 3 расположен таким образом, что его первый выход присоединен к первому входу устройства слежения за целью 4. Пульт управления 3 и устройство слежения за целью 4 связаны с лазерным дальномером 5 таким образом, что второй выход пульта управления 3 присоединен к входу лазера 6, а выход устройства слежения за целью 4 связан с управляемым зеркалом 7, которое оптически связано с приемником излучения 8. Первый выход приемника излучения 8 присоединен ко второму входу устройства слежения за целью 4. Процессор стрельбы 9 и механизм выстрела 10 установлены так, что первый вход процессора стрельбы 9 присоединен к третьему выходу пульта управления 3, а выходом процессора стрельбы 9 присоединен к входу механизма выстрела 10. Вход датчика 11 углов поворота управляемого зеркала 7 связан с управляемым зеркалом 7, а его выход присоединен к первому входу модуля кадра 12, установленному так, что второй его вход присоединен ко второму выходу приемника излучения 8. Модуль анализа 13 установлен так, что первый его выход связан со вторым входом процессора стрельбы 9, первый вход модуля анализа 13 связан с выходом модуля кадра 12. Модуль образов 14 установлен так, что его выход присоединен ко второму входу модуля анализа 13, а второй выход модуля анализа 13 присоединен ко второму входу дисплея 2.
Система прицеливания оружия с лазерным дальномером работает следующим образом. С системы формирования изображения 1 поступает информация о наблюдаемом участке местности, изображение которого пользователь наблюдает на дисплее 2. При наличии в поле зрения цели, пользователь с пульта управления 3 подает команду на включение устройства слежения за целью 4 и наводит прицельную марку и связанную с ней визирную ось лазерного дальномера 5 на цель. Затем с пульта управления 3 на лазерный дальномер 5 подается команда на измерение расстояния. Лазер 6 формирует импульс оптического излучения, на приемник излучения 8 поступает оптическое излучение, отраженное от цели. В электронной схеме приемника излучения 8 формируется электрический сигнал, содержащий информацию о расстоянии до цели. Этот сигнал поступает в процессор стрельбы 9 и в устройство слежения за целью 4, в котором автоматически устанавливается диапазон углового сканирования, после чего лазер 6 включается в частотном режиме и осуществляется дискретное смещение управляемого зеркала 7 по двум углам в полярной системе координат, т.е. производится двумерное дискретное сканирование визирной оси лазерного дальномера 5. После каждого смещения визирной оси лазерного дальномера 5 формируется импульс лазерного излучения и производится измерение расстояния до цели. Текущие данные о расстоянии до цели с приемника излучения 8, а также данные об угловом положении управляемого зеркала 7 с датчика 11 углов поворота управляемого зеркала 7 поступают в модуль кадра 12. В модуле кадра 12 формируется и запоминается, на время полного цикла сканирования, электрический сигнал, содержащий информацию о наборе расстояний, с данными об угловом положении линии визирования дальномера 5 при каждом измерении. В электронную память модуля образов 14 заранее записываются аналогичные наборы электрических сигналов, характеризующие различные виды целей, например танк, боевая машина пехоты и т.п. По завершении кадра в модуле анализа 13 производится сопоставление информации, поступившей из модуля кадра 12 с информацией из модуля образов 14. При наличии совпадения текущего кадра с одним из образов в модуле анализа 13 формируется информационный сигнал об этом образе, к примеру «танк», «боевая машина пехоты», поступающий на дисплей 2. Одновременно информация с модуля анализа 13 подается в процессор стрельбы 9, где она наряду с другими данными может быть использована для корректировки точки прицеливания. В итоге с пульта управления 3 подается команда в процессор стрельбы 9, а с последнего - на механизм выстрела 10, и производится выстрел.
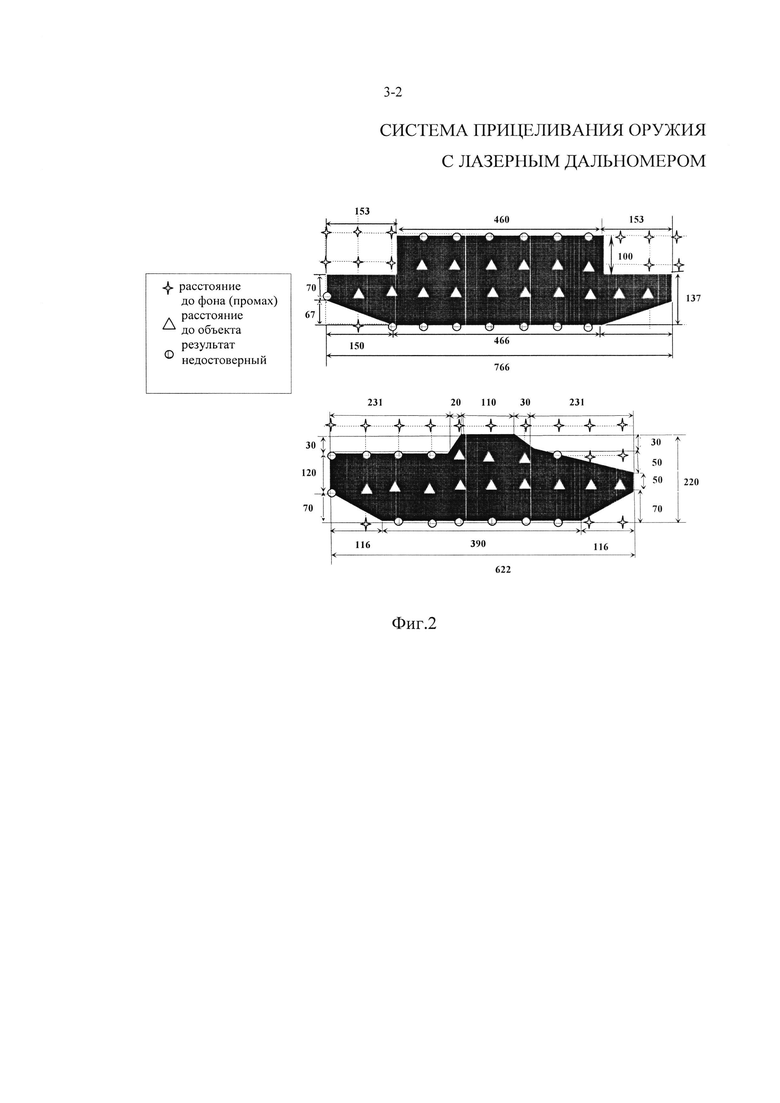
На фиг. 2 условно показаны, по данным электронного ресурса «Образцы мишеней для стрельб» URL: http://twipx.com/file/1607853/, двумерные мишени боковых проекций танка (мишень №12а) и боевой машины пехоты (мишень №14а). Линейные размеры в плоскости мишени указаны в сантиметрах.
Предполагается, что осуществляется строчное сканирование визирной оси дальномера при дискрете смещения, равном 0,75 м, как в горизонтальном, так и в вертикальном направлении. После каждого смещения визирной оси измеряется расстояние. Возможны три вида результата измерения: определение расстояния до цели - эти данные в пределах одного кадра примерно равны, определение расстояния до фона - эти данные больше расстояния до цели (при отсутствии фона будет зафиксирован промах), и результат при совпадении линии визирования дальномера с границами контура цели - эти данные, в среднем, делятся поровну между данными для цели и для фона. Из сравнения двух матриц результатов измерения, показанных на фиг. 2, видно, что они существенно отличаются, т.е. различные цели можно идентифицировать по такому признаку.
Все элементы рассматриваемого устройства являются известными. Система формирования изображения 1 может представлять, например, телекамеру или тепловизионный приемник, дисплей 2 может быть матричным твердотельным или жидкокристаллическим, лазер 6 - импульсным полупроводниковым или твердотельным, приемник излучения 8 - фотоэлектрическим приемником оптического излучения с усилителем и электронной схемой - измерителем временного интервала, управляемое зеркало 7 закреплено на 3D-сканере. Остальные функциональные узлы представляют типовые устройства радиоэлектронной аппаратуры.
Таким образом, в результате предложенного решения обеспечено получение технического результата: создана система прицеливания оружия с лазерным дальномером с автоматизированным определением типа цели, предъявлением соответствующей информации пользователю и обеспечением возможности автоматического выбора точки прицеливания. Это позволит пользователю выбрать оптимальный вид боеприпаса, особенно в условиях плохой видимости, а также выбрать наилучшую точку прицеливания, например, в наиболее уязвимую область цели, что может быть заранее учтено в образе цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 1996 |
|
RU2102684C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ПРИЦЕЛИВАНИЯ И ВЫСТРЕЛА ИЗ СТРЕЛКОВОГО ОРУЖИЯ (ЕГО ВАРИАНТЫ) | 2002 |
|
RU2240485C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| ТРЕНАЖЕР ОПЕРАТОРОВ ПУШЕЧНО-РАКЕТНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2465534C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| ПРИЦЕЛ-ДАЛЬНОМЕР ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И ГРАНАТОМЕТОВ | 2013 |
|
RU2536186C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
Изобретение относится к системам прицеливания оружия. Система содержит систему формирования изображения (1), дисплей (2), установленный так, что его первый вход связан с выходом системы формирования изображения (1), пульт управления (3), устройство слежения за целью (4), расположенное так, что первый его вход связан с первым выходом пульта управления (3), лазерный дальномер (5), состоящий из последовательно установленных лазера (6), управляемого зеркала (7) и приемника излучения (8). Пульт управления (3) и устройство слежения за целью (4) связаны с лазерным дальномером (5) так, что второй выход пульта управления (3) присоединен к входу лазера (6), а выход устройства слежения за целью (4) связан с управляемым зеркалом (7). Управляемое зеркало (7) оптически связано с приемником излучения (8) лазерного дальномера (5). Первый выход приемника излучения (8) присоединен ко второму входу устройства слежения за целью (4). Процессор стрельбы (9), установлен так, что первый его вход связан с третьим выходом пульта управления (3), а второй вход процессора стрельбы (9) связан со вторым выходом приемника излучения (8) лазерного дальномера (5). Вход механизма выстрела (10) присоединен к выходу процессора стрельбы (9). Дополнительно установлен датчик (11) углов поворота зеркала (7), вход которого связан с управляемым зеркалом (7), введены модуль кадра (12), модуль анализа (13) и модуль образов (14). Выход датчика (11) углов поворота зеркала связан с первым входом модуля кадра (12), ко второму входу которого присоединен третий выход приемника излучения лазерного дальномера (5). Выход модуля кадра (12) связан с первым входом модуля анализа (13), ко второму входу которого присоединен выход модуля образов (14). Первый выход модуля анализа (13) связан с третьим входом процессора стрельбы (9). Второй выход модуля анализа (13) присоединен ко второму входу дисплея (2). Обеспечивается автоматизированное определение типа цели, автоматический выбор точки прицеливания. 2 ил.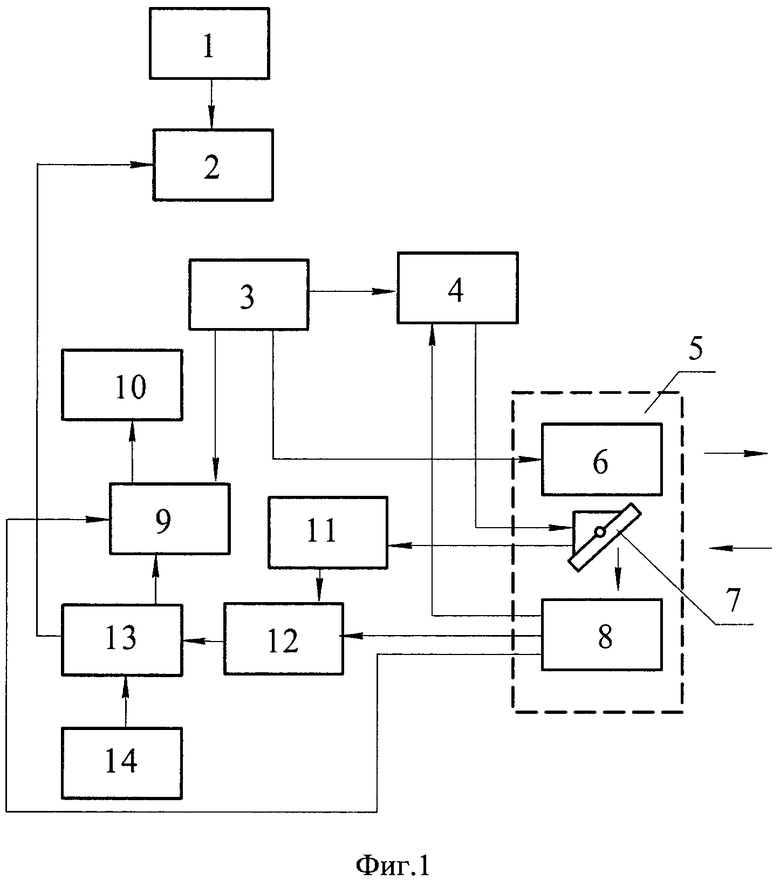
Система прицеливания оружия с лазерным дальномером, содержащая систему формирования изображения, дисплей, установленный так, что его первый вход связан с выходом системы формирования изображения, пульт управления, устройство слежения за целью, расположенное так, что первый его вход связан с первым выходом пульта управления, лазерный дальномер, состоящий из последовательно установленных лазера, управляемого зеркала и приемника излучения, причем пульт управления и устройство слежения за целью связаны с лазерным дальномером так, что второй выход пульта управления присоединен к входу лазера, а выход устройства слежения за целью связан с управляемым зеркалом, которое оптически связано с приемником излучения лазерного дальномера, первый выход приемника излучения присоединен ко второму входу устройства слежения за целью, а также процессор стрельбы, установленный так, что первый его вход связан с третьим выходом пульта управления, а второй вход процессора стрельбы связан со вторым выходом приемника излучения лазерного дальномера, и механизм выстрела, вход которого присоединен к выходу процессора стрельбы, отличающаяся тем, что дополнительно установлен датчик углов поворота зеркала, вход которого связан с управляемым зеркалом, введены модуль кадра, модуль анализа и модуль образов, установленные так, что выход датчика углов поворота зеркала связан с первым входом модуля кадра, ко второму входу которого присоединен третий выход приемника излучения лазерного дальномера, выход модуля кадра связан с первым входом модуля анализа, ко второму входу которого присоединен выход модуля образов, причем первый выход модуля анализа связан с третьим входом процессора стрельбы, а второй выход модуля анализа присоединен ко второму входу дисплея.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2000 |
|
RU2155323C1 |

