Устройство управления нейрореабилитационным тренажером верхней конечности человека относится к реабилитационной технике, а именно к устройствам для управления реабилитационными нейротренажерами верхней и нижней конечности, и может быть использовано для активации предназначенных для сгибания и разгибания конечностей приводов нейротренажера путем формирования управляющих команд активации или торможения приводов на основании анализа сигнала от датчиков электрической мышечной активности.
Существует значительное число устройств управления реабилитационными нейротренажерами в составе серийно-изготавливаемых изделий или в виде запатентованных решений.
Известен тренажер Kinetec Maestra Portable СРМ (http://kinetec.fr/en/kinetec-selection/cpm-continuous-passive-motion/attelle-kinetec-maestra-portable-detail.html), предназначенный для разработки движения кисти и пальцев руки, содержащий электродвигатель и приводы, закрепленные на пальцах кисти.
Тренажер предназначен только для механической реабилитации пальцев кисти. Активация движения происходит без участия пациента, поскольку в устройстве управления данного тренажера отсутствуют датчики электрической мышечной активности, блок регистрации и анализа электрической активности мышц, формирующие биологическую обратную связь, основанную на изменении электрической активности и совершении принудительного движения конечности.
Известен механотерапевтический прибор ARTROMOT-F (https://www.djoglobal.de/arzt/artromot-f.html) для разработки суставов верхней конечности, раннего восстановления подвижности суставов кисти, а также для предотвращения осложнений, связанных с длительной иммобилизацией, содержащий электродвигатель и работающие от него приводы, закрепленные на пальцах кисти.
Данный прибор не позволяет сформировать биологическую обратную связь, основанную на изменении электрической активности и использующуюся для совершения принудительного движения конечности, активирующегося с участием пациента, поскольку в устройстве управления данного тренажера также отсутствуют датчики электрической мышечной активности, блок регистрации и анализа электрической активности мышц.
Известен также роботизированный механотренажер ReoGo (http://www.motorika.com/?categoryId=89998&itemId=204103) - комплекс в виде экзоскелета верхней конечности с биологической обратной связью, основанной на визуальном стимуле, предназначенный для измерения, оценки и увеличения мышечной силы, улучшения координации движений и расширения диапазона двигательной активности и функциональных возможностей верхней конечности, использующий, в том числе, зрительную биологическую обратную связь.
Биологическая обратная связь в устройстве для управления данным реабилитационным комплексом построена только на визуальных раздражителях и не использует другую доминантную составляющую - изменение электрической активности мышц пациента и совершение, в ответ на это, принудительного движения верхней конечности. Технологические решения, примененные в данном комплексе, не позволяют использовать его для лежачих пациентов, а также для реабилитации нижней конечности.
Известен тренажер для восстановления подвижности пальцев рук по патенту RU 147759, содержащий экзоскелет кисти руки с приводами перемещения пальцев экзоскелета и блоком их управления, при этом привод перемещения каждого из пальцев выполнен индивидуальным, а пальцы снабжены средством привлечения внимания пациента, при этом блок управления приводами пальцев выполнен с возможностью подключения к энцефалографическому шлему. Включение привода пальцев экзоскелетной конструкции управляется фокусированием внимания человека на вспышках светодиода на конкретном пальце, что приводит к специфическим изменениям в электроэнцефалограмме, которые с помощью блока управления превращаются в управляющую команду для привода соответствующего пальца.
Биологическая обратная связь у тренажера построена только на анализе электроэнцефалографических коррелятов визуальных раздражителей и не использует другую доминантную составляющую - изменение электрической активности мышц пациента. Кроме того, данный тренажер не применим для реабилитации всей верхней конечности, из-за отсутствия возможности совершать движение руки пациента в проекции лучезапястного и локтевого суставов, а также для реабилитации нижней конечности, из-за отсутствия возможности совершать движение руки пациента в проекции голеностопного и коленного суставов.
Наиболее близким техническим решением к заявляемому, которое было выбрано в качестве прототипа, является «Носимое вспомогательное устройство, содействующее двигательной активности, и управляющая программа» по патенту RU 2364385 от 22.11.2005, конвенционный приоритет: 26.01.2005 JP 2005-018295, публикации заявки: 10.03.2009, опубликовано: 20.08.2009, МПК А61Н 3/00 (2006.01), которое содержит: датчики биологического сигнала от пользователя, приводы, детектор регистрации биологического сигнала от пользователя, источник приведения в движение средств перемещения, блок управления источником приведения в движение средств перемещения в соответствии с зарегистрированным биологическим сигналом, блок калибровки, выполненный с возможностью регулировки коэффициента усиления между биологическим сигналом, зарегистрированным детектором биологического сигнала, и крутящим моментом, созданным мышцами, или мышечным усилием, оценка которого произведена блоком оценки крутящего момента, созданного мышцами, таким образом, чтобы зависимость между биологическим сигналом и крутящим моментом, созданным мышцами, или мышечным усилием соответствовала заранее заданной зависимости.
Но данное устройство обеспечивает управление, на которое не оказывают влияние изменяющиеся факторы: индивидуальные отличия пользователя и его физическое состояние, поскольку реагирует на относительное усилие, зависящее от соотношения между силами, с одной стороны, созданной источником приведения в движение, с другой стороны мышечным усилием, созданным пользователем, носящим вспомогательное устройство, при этом сравнивают зарегистрированные данные о миоэлектричестве (электромиограмму, ЭМГ (EMG)) и значение мышечного усилия (F), полученное путем оценки, с заранее заданным устанавливаемым значением усиления (Gs) из блока хранения данных, без сравнения электромиограмм ненапряженной мышцы и напряженной мышцы, конкретного пользователя, что приводит к низкой корреляции между задуманным движением и выработанным сигналом, направляемым к источнику приведения в движение вспомогательного устройства.
Задачей предлагаемого технического решения является повышение эффективности нейрореабилитации при заболеваниях и поражениях ЦНС, приводящих к двигательному дефициту верхней и нижней конечности.
Задача решена за счет устройства управления нейрореабилитационным тренажером верхней конечности человека, содержащего сенсорные датчики измерения электромиографического сигнала, расположенные на сгибательных и разгибательных поверхностях плеча и предплечья и подключенные через последовательно установленные блок регистрации и обработки электромиографического сигнала и блок фильтрации шумов электромиографического сигнала к входу блока выделения частоты электромиографического сигнала, блок принятия решения о движении в соответствии с зарегистрированным электромиографическим сигналом, подключенный через блок управления приводами к приводам верхней конечности, при этом блок выделения частоты электромиографического сигнала связан с блоком принятия решения через параллельно подключенные блоки определения фоновой мощности электромиографического сигнала и определения активной мощности электромиографического сигнала.
Устройство за счет блоков определения фоновой мощности электромиографического сигнала и активной мощности электромиографического сигнала, входы которых параллельно присоединены к выходу блока выделения частоты электромиографического сигнала, а выходы каждого из блоков соединены со входом блока принятия решения о запуске движения, позволяет управлять нейротренажером, ставя зависимость начала, остановки или изменение скорости движения нейротренажера, с размещенной в нем конечностью пациента, от соотношения текущей мощности сигнала к фоновой мощности PWRt / PWRr для данного отрезка времени Tt, для определенной мышцы, вычисленного блоком принятия решения при формировании управляющей команды, на основе результатов анализа регистрируемого датчиками-сенсорами электромиографического сигнала пациента и активизации-деактивации движения реабилитируемой конечности, помещенной в нейротренажер, что расширяет арсенал средств для нейрореабилитации.
Согласно данным современных научных публикаций применение такой активации движения способствует созданию устойчивой биологической обратной связи, приводящей к более быстрому формированию обходных нейронных связей и восстановлению двигательной активности мышц.
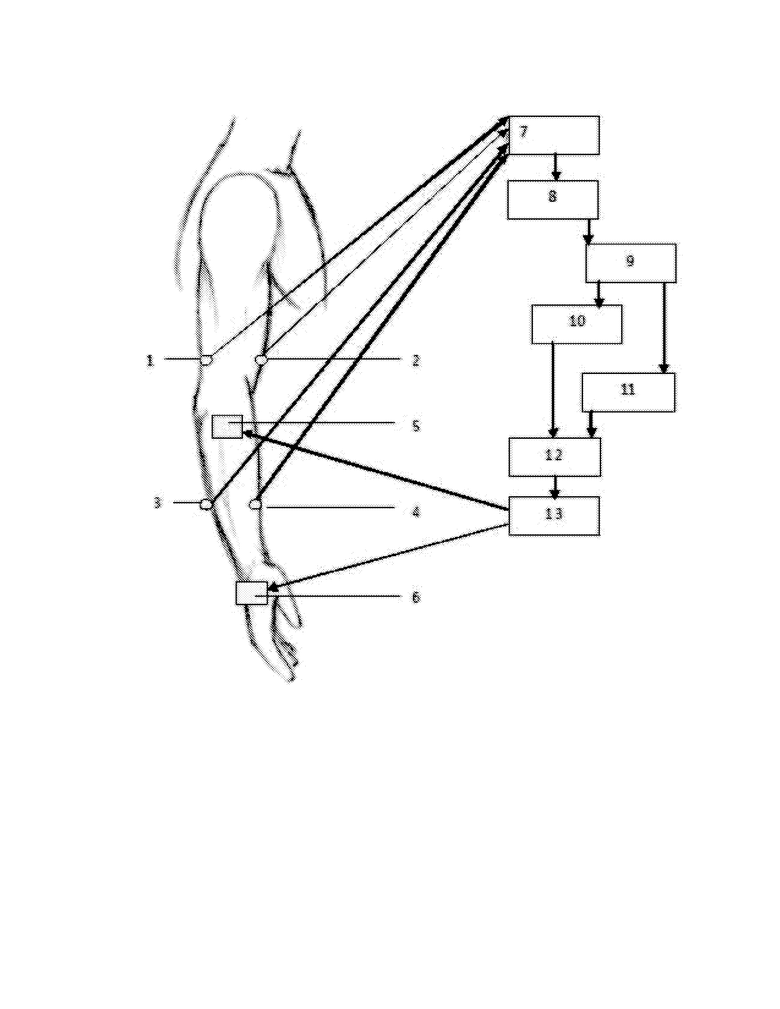
На чертеже приведена структура системы устройства управления нейрореабилитационным тренажером верхней конечности человека.
Устройство управления нейрореабилитационным тренажером верхней конечности человека выполнено следующим образом.
Устройство управления нейрореабилитационным тренажером верхней конечности человека содержит сенсорный датчик 1 электромиографического сигнала, расположенный на разгибательной поверхности плеча, сенсорный датчик 2 электромиографического сигнала, расположенный на сгибательной поверхности плеча, сенсорный датчик 3 электромиографического сигнала, расположенный на разгибательной поверхности предплечья, сенсорный датчик 4 электромиографического сигнала, расположенный на сгибательной поверхности предплечья.
Выходы каждого из датчиков 1, 2, 3, 4 измерения электромиографического сигнала соединены со входом аппаратного контроллерного блока 7 регистрации и обработки электромиографического сигнала от пользователя.
Приводы 5, 6 расположены в местах обеспечения тренажером сгибательного и разгибательного движения локтевого и лучезапястного суставов и своими входами соединены с выходом блока 13 управления приводами.
Устройство в дополнение к блокам 12 принятия решения о запуске движения в соответствии с зарегистрированным биологическим сигналом и 13 управления приводами, обеспечивающими управление работой нейротренажера, дополнительно снабжено блоками: 8 фильтрации шумов электромиографического сигнала, 9 выделения частоты электромиографического сигнала, 10 определения фоновой мощности электромиографического сигнала, 11 определения активной мощности электромиографического сигнала.
В устройстве выход каждого из сенсорных датчиков 1, 2, 3, 4 измерения электромиографического сигнала последовательно соединен через вход-выход блоков 7 регистрации обработки электромиографического сигнала от пользователя и 8 фильтрации шумов электромиографического сигнала к входу блока 9 выделения частоты электромиографического сигнала, к выходу которого параллельно присоединены входы блока 10 определения фоновой мощности электромиографического сигнала, и блока 11 определения активной мощности электромиографического сигнала, выходы каждого из которых соединены со входом блока 12 принятия решения о запуске движения в соответствии с зарегистрированным электромиографическим сигналом, выход которого через вход-выход блока 13 управления приводами соединен с входом приводов 5, 6.
Устройство управления нейрореабилитационным тренажером верхней конечности человека работает следующим образом.
Руку пользователя закрепляют в нейротренажере, располагая сенсорный датчик 1 электромиографического сигнала на разгибательной поверхности плеча, сенсорный датчик 2 электромиографического сигнала - соответственно на сгибательной поверхности плеча, сенсорный датчик 3 электромиографического сигнала - на разгибательной поверхности предплечья, сенсорный датчик 4 электромиографического сигнала - на сгибательной поверхности предплечья.
Приводы 5 и 6 располагают на манжетах нейротренажера, в местах обеспечения нейротренажером сгибательного и разгибательного движения локтевого и лучезапястного суставов.
Измеренные при ненапряженных и напряженных мышцах электромиографические сигналы с выходов сенсорных датчиков 1, 2, 3, 4 поступают на вход аппаратного контроллерного блока 7 для регистрации и обработки, где аналоговый электрический сигнал усиливают, преобразуют в цифровой вид, для формирования управляющих команд начала, остановки или изменения скорости движения, задаваемого для определенной мышцы или группы мышц, размещенной в нейротренажере конечности пациента.
При формировании управляющих команд для повышения степени корреляции между задуманным движением и выработанным сигналом, направляемым к источнику приведения в движение приводов до подачи на нейротренажер, зарегистрированные электромиографические сигналы (далее ЭМГ-сигналы) дополнительно обрабатывают следующим образом.
Блоком 8 фильтрации шумов ЭМГ-сигнала отфильтровывают шумы фильтром Баттерворта 4-го порядка, удаляя полосу частот от 48 Гц до 52 Гц, и подают на вход блока 9, где выделяют необходимую для анализа полосу частот, удаляя полосы частоты ниже 35 Гц и выше 45 Гц, и получают таким образом показатель фонового ЭМГ-сигнала для данной ненапряженной мышцы. Блок 10 вычисляет мощность фонового фильтрованного ЭМГ-сигнала PWRr, зарегистрированного в течение времени Tr=~10 сек, для каждой ненапряженной мышцы по формуле:
PWRr=(Amp(1)^2+...+Amp(n)^2) /n,
где PWRr - значение мощности фонового ЭМГ- сигнала,
n - количество значений амплитуд (семплов) в сигнале, n=Tr * SR,
где SR - частота дискретизации ЭМГ-сигнала сенсорного управления,
Amp(i) - значение амплитуды сигнала в точке i, где i=1...n.
Полученное значение PWRr показателя фонового ЭМГ-сигнала для определенной ненапряженной мышцы затем фиксируют.
Блок 11 вычисляет мощность ЭМГ-сигнала, зарегистрированного в течение времени Tt=~1 сек, каждой напряженной мышцы по формуле:
PWRt=(Amp(1)^2+...+Amp(n)^2) / n,
где - PWRt - значение мощности ЭМГ – сигнала,
n - количество значений амплитуд (семплов) в ЭМГ-сигнале, n=Tt * SR,
где SR - частота дискретизации ЭМГ-сигнала сенсорного управления,
Amp(i) - значение амплитуды сигнала в точке i, где i=1...n.
Полученное значение PWRt мощности ЭМГ-сигнала для определенной напряженной мышцы затем фиксируют.
По результатам вычисленного блоком 12 соотношения текущей мощности сигнала к фоновой мощности PWRt / PWRr для данного отрезка времени Tt, поступивших с блоков 10 и 11, формируют управляющие команды начала, остановки или изменения скорости движения, задаваемого размещенной в нейротренажере конечности пациента.
В момент совершения конечностью заданного нейротренажером движения у пациента формируется биологическая обратная связь, связывающая намерение совершить движение с информацией от зрительной и проприоцептивной систем и приводящая к более выраженному возникновению замещающих нейронных связей в центральной нервной системе и восстановлению двигательной активности конечности.
Основным преимуществом данного устройства по сравнению с существующими аналогами является то, что формируют управляющие команды начала, остановки или изменения
скорости движения, задаваемого нейротренажеру, с размещенной в нем конечности пациента, по результатам вычисленного блоком 12 соотношения текущей мощности сигнала к фоновой мощности PWRt / PWRr для данного отрезка времени Tt, поступивших с блоков 10 и 11.
Согласно данным современных научных публикаций применение такой активации движения способствует созданию устойчивой биологической обратной связи, приводящей к более быстрому формированию обходных нейронных связей и восстановлению двигательной активности мышц и ускоренной реабилитации.
Данное устройство применимо для реабилитации и нижней конечности человека, для чего датчики и манжеты с приводами размещают на нижней кончности человека. Работу устройства осуществляют вышеописанным способом.
Техническим результатом является зависимость начала, остановки или изменения скорости движения нейротренажера с размещенной в нем конечностью пациента от соотношения текущей мощности сигнала к фоновой мощности PWRt / PWRr для данного отрезка времени Tt, для определенной мышцы, вычисленного блоком принятия решения при формировании управляющей команды, что расширяет арсенал средств для нейрореабилитации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления двигательной активности верхней и нижней конечностей человека | 2017 |
|
RU2644295C1 |
| Способ восстановления двигательной функции конечности | 2019 |
|
RU2703838C1 |
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| Способ комплексной оценки функции верхних конечностей | 2019 |
|
RU2725055C1 |
| Способ восстановления двигательной функции кисти | 1989 |
|
SU1703132A1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТЕЙ С НЕЙРОМОТОРНЫМИ НАРУШЕНИЯМИ МЕТОДОМ БИОЛОГИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ | 1996 |
|
RU2148946C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Способ и комплекс бионического управления техническими устройствами | 2020 |
|
RU2756162C1 |
| Устройство для восстановления и развития функций кистей рук | 2014 |
|
RU2617199C2 |
Изобретение относится к медицинской технике, а именно к нейрореабилитационным тренажерам. Устройство управления нейрореабилитационным тренажером верхней конечности человека содержит сенсорные датчики измерения электромиографического сигнала, расположенные на сгибательных и разгибательных поверхностях плеча и предплечья и подключенные через последовательно установленные блок регистрации и обработки электромиографического сигнала и блок фильтрации шумов электромиографического сигнала к входу блока выделения частоты электромиографического сигнала, блок принятия решения о движении в соответствии с зарегистрированным электромиографическим сигналом, подключенный через блок управления приводами к приводам верхней конечности, при этом блок выделения частоты электромиографического сигнала связан с блоком принятия решения через параллельно подключенные блоки определения фоновой мощности электромиографического сигнала и определения активной мощности электромиографического сигнала. Использование изобретения обеспечивает расширение арсенала средств для нейрореабилитации. 1 ил.
Устройство управления нейрореабилитационным тренажером верхней конечности человека, содержащее сенсорные датчики измерения электромиографического сигнала, расположенные на сгибательных и разгибательных поверхностях плеча и предплечья и подключенные через последовательно установленные блок регистрации и обработки электромиографического сигнала и блок фильтрации шумов электромиографического сигнала к входу блока выделения частоты электромиографического сигнала, блок принятия решения о движении в соответствии с зарегистрированным электромиографическим сигналом, подключенный через блок управления приводами к приводам верхней конечности, отличающееся тем, что блок выделения частоты электромиографического сигнала связан с блоком принятия решения через параллельно подключенные блоки определения фоновой мощности электромиографического сигнала и определения активной мощности электромиографического сигнала.
| US 2016058647 A1, 03.03.2016 | |||
| US 2015141773 A1, 21.05.2015 | |||
| Способ изготовления защитных, например, от радиационных поражений материалов | 1958 |
|
SU147759A1 |

