Область техники
Настоящее изобретение относится к сцепке из тягача, в частности, трактора и сельскохозяйственного пресс-упаковщика в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Сельскохозяйственные пресс-упаковщики используются для прессования убранной массы в тюки. При этом обычно речь идет об уборочных машинах, которые протягиваются по полю тягачом, в частности, трактором. Поскольку, как правило, пресс-упаковщики не имеют собственного приводного двигателя, необходимые для эксплуатации транспортирующие и прессовальные аппараты пресс-упаковщика снабжаются приводной мощностью от тягача. Обычно это осуществляется через имеющийся на тракторе стандартный задний вал отбора мощности, который приводится в приводное соединение с (главным) приводным валом пресс-упаковщика.
В так называемых пресс-упаковщиках для формирования прямоугольных тюков - альтернативно, например, прессам для формирования круглых тюков, - спрессованные тюки обвязываются шпагатом, который затем завязывается в узлы. Благодаря этому спрессованные из сильно уплотненной убранной массы тюки сохраняют свою форму так как охватывающий шпагат противодействует усилиям возвратного расширения внутри тюка. При этом используется узловязальное устройство, которое содержит в основном устройство подачи шпагата (в частности, иглу для шпагата), а также узловязальный аппарат для удержания, связывания и отрезания шпагата. Обычно узловязальное устройство также приводится от главного приводного вала пресс-упаковщика, то есть от тягача. Вследствие требуемого сложного взаимодействия функциональных элементов известные узловязальные устройства имеют, как правило, сложную механическую систему. В зависимости от конструкции узловязального устройства в процессе обвязки и вязания узлов (или после него) могут случаться функциональные сбои. Так, например, это может происходить, когда после обвязки узел не сходит с крючка узловязателя. При следующей обвязке тюка это может приводить к повреждению узловязателя в результате столкновения с предыдущим, все еще не снятым узлом. Игла может также повреждаться при таком столкновении.
Вследствие опасности повреждений в узловязальном устройстве опытные водители наблюдают за его функционированием в ходе уборки. Для этого используется, например, оптически воспринимающая узловязальное устройство камера, а для водителя воспринимаемое камерой изображение отображается на расположенном в кабине тягача устройстве отображения (мониторе). Поскольку большинство обычных пресс-упаковщиков содержат несколько (например, шесть) блоков узловязателей, расположенных рядом друг с другом по отношению к прессовальному каналу, наблюдение за ними требует большой внимательности. При этом водитель должен одновременно следить за положением подбираемого валка убранной массы и за работой подборщика пресс-упаковщика, так что требуемое наблюдение за узловязальным устройством усложняет процесс уборки.
Раскрытие изобретения
Соответственно, задачей настоящего изобретения является создание сцепки из тягача и пресс-упаковщика, в которой предотвращаются повреждения пресс-упаковщика вследствие сбоев, которые могут происходить в процессе обвязки и/или вязания узлов, и которая освобождает водителя от нагрузки по наблюдению за узловязальным устройством.
Решение указанной задачи достигается в сцепке, обладающей признаками по пункту 1 формулы изобретения. Сцепка отличается тем, что содержит устройство управления, которое выполнено с возможностью при достижении критического рабочего состояния (режима эксплуатации) узловязального устройства разрывать приводное соединение между тягачом и пресс-упаковщиком. За счет этого может выгодным образом выполняться наблюдение за узловязальным устройством, причем в случае критического рабочего состояния, то есть в частности, когда создается повышенная опасность повреждения узловязального устройства (например, когда узел неправильно сходит с крючка узловязателя), устройство управления автоматически предотвращает повреждения (несмотря на критическое рабочее состояние). Для обеспечения этого в указанном случае устройство управления вызывает разрывание приводного соединения между тягачом и пресс-упаковщиком. Посредством этого вызванного разрывания как узловязальное устройство, так и остальные аппараты пресс-упаковщика останавливаются, - без вмешательства водителя, - так, что прежде всего удерживаются подвижные элементы узловязального устройства и уже не могут столкнуться. Кроме того, убранная масса внутри пресс-упаковщика также останавливается как можно быстрее, что позволяет избежать (трудно устраняемого) забивания материала внутри пресс-упаковщика. Благодаря автоматическому выполнению разрывания привода водитель освобождается от задачи наблюдения за узловязальным устройством и может лучше сконцентрироваться на других задачах. Кроме того, автоматическое выполнение разрывания привода имеет, как правило, более короткое время реагирования, чем при «ручном наблюдении» водителем, поскольку здесь отсутствует промедление между распознаванием ошибочной обвязки и выполнением соответствующей меры (разрывания привода). Далее, устраняется риск того, что водитель вообще не заметит сбой в функционировании узловязального устройства, - например, по невнимательности или неопытности. Таким образом, решение по изобретению обеспечивает выполнение указанной задачи.
В принципе возможны различные приводные системы, позволяющие разрывать привод пресс-упаковщика. Предпочтительно приводное соединение между пресс-упаковщиком и тягачом может устанавливаться через подключаемый и отключаемый вал отбора мощности тягача, причем устройство управления находится в сигнальной связи с тягачом, чтобы при достижении критического рабочего состояния вызывать отключение вала отбора мощности. В этом случае приводное соединение разрывается на тягаче, и это дает преимущество в том, что на пресс-упаковщике не требуется наличия сцепления приводной трансмиссии. Благодаря тому, что устройство управления состоит с тягачом в сигнальной связи, вместо этого посредством соответствующего управления приводится в действие сцепление, относящееся к тягачу.
Согласно предпочтительному решению по развитию изобретения пресс-упаковщик может приводиться посредством приводного вала, причем для тягача предназначен механизм сцепления, который под действием управления посредством устройства управления может перемещаться между замкнутым состоянием, в котором имеется приводное соединение между приводным двигателем тягача и приводным валом пресс-упаковщика, и разомкнутым состоянием, в котором приводное соединение разорвано.
В предпочтительном примере выполнения предусмотрено, что отключение вала отбора мощности включает в себя торможение вала отбора мощности, для чего в механизме сцепления предусмотрено тормозное устройство. Особенно удобным образом для тягача предназначен механизм сцепления, скомбинированный с тормозным устройством, так что при разрывании приводного соединения аппараты пресс-упаковщика тормозятся тормозным устройством тягача. По сравнению с простым разъединением это обеспечивает еще более короткое время реагирования.
Далее, в целесообразном примере осуществления устройство управления относится к пресс-упаковщику, причем устройство управления состоит в сигнальной связи с тягачом, в частности, с механизмом сцепления, чтобы посредством управления тягачом, в частности, механизмом сцепления, иметь возможность разрывать приводное соединение между тягачом и пресс-упаковщиком. Отнесение устройства управления к пресс-упаковщику дает то преимущество, что с пресс-упаковщиком могут простым образом комбинироваться различные типы тягачей. В этом случае целесообразно, чтобы требуемая для узловязального устройства система датчиков для восприятия рабочих состояний, включая совместимый с ней блок обработки данных, относилась к пресс-упаковщику.
Для обеспечения быстрого, надежного и стандартизированного обмена данными (с обеспечением совместимости при различных производителях) между пресс-упаковщиком и тягачом связь между устройством управления и тягачом осуществляется через системную шину данных, в частности, через стандартную системную шину ISOBUS. Возможны и другие виды проводной и/или беспроводной связи.
В принципе узловязальное устройство пресс-упаковщика может иметь различную конструкцию, при этом особенно в узловязальных устройствах без принудительного стягивания шпагата существует опасность того, что узел останется застрявшим на крючке узловязателя (и связанная с этим опасность двойной и неоднократной обвязки). Предпочтительно для узловязального устройства предназначен, по меньшей мере, один узловязатель и, по меньшей мере, один датчик для восприятия критического состояния узловязального устройства. Датчик может работать различным образом, чтобы воспринимать критическое состояние узловязального устройства. При этом критическое состояние узловязального устройства является, в частности, состоянием, при котором наступает опасность повреждения элементов узловязального устройства (узловязателя, зажимного колеса, иглы), в частности, в результате возможного столкновения между узловязателем, иглой и/или образованным вязальным шпагатом узлом.
Согласно предпочтительному решению по развитию изобретения для узловязального устройства предназначена система различных датчиков для восприятия рабочих состояний узловязального устройства, причем устройство управления может быть реализовано таким образом, что при обнаружении предварительно заданных рабочих состояний оно делает заключение о критическом состоянии узловязального устройства и вызывает разрыв приводного соединения. Для этого в устройстве управления может быть, например, записана логика, которая оценивает воспринятые датчиками величины с учетом логических связей (например, условий «и/или» или булевских операторов»). При этом возможно, что устройство управления помимо рабочих состояний узловязального устройства привлекает другие рабочие состояния и/или эксплуатационные параметры пресс-упаковщика и/или тягача, чтобы идентифицировать критическое рабочее состояние узловязального устройства.
Краткий перечень чертежей
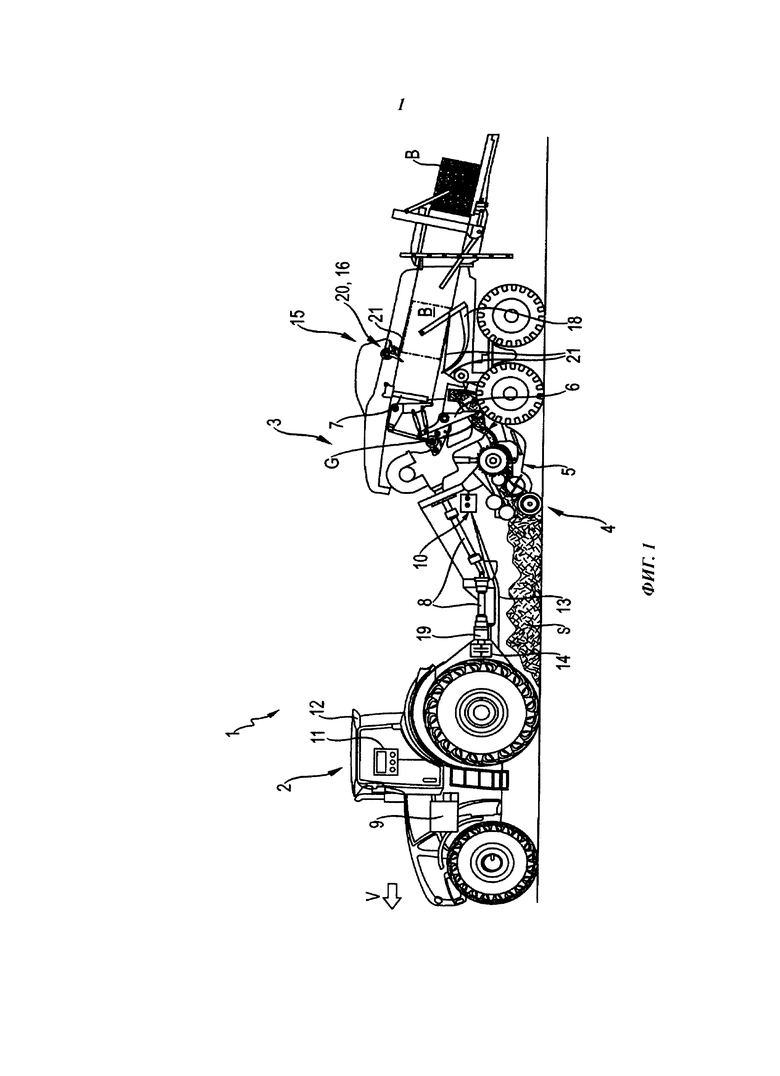
Далее изобретение будет подробно пояснено на примере выполнения со ссылкой на прилагаемый чертеж. На единственном чертеже на виде сбоку схематично показана сцепка при движении по полю.
Осуществление изобретения
На чертеже на виде сбоку схематично показана сцепка 1, содержащая тягач в виде трактора 2 и протягиваемую им сельскохозяйственную уборочную машину в виде пресс-упаковщика 3 для формирования прямоугольных тюков, в процессе движения по полю.
Приводной двигатель трактора 2 известным образом является частью приводной трансмиссии привода хода трактора 2, то есть служит для привода колес трактора 2. В зависимости от числа оборотов приводного двигателя 9, а также от выбранного передаточного отношения передаточного механизма трактор 2 протягивает пресс-упаковщик 3 по полю со скоростью V, обозначенной стрелкой.
Пресс-упаковщик 3 содержит различные рабочие аппараты 4, 5, 6, 7 для транспортирования и/или обработки убранной массы. Спереди находится подборщик 4 который подбирает уложенную в виде валка S убранную массу G, собирает ее с боковых сторон к центру и транспортирует в канал питателя пресс-упаковщика 3 для дальнейшей обработки. Затем убранная масса G проходит через оснащенное режущим ротором режущее устройство 5 и далее предварительно уплотняется подгребателем 6, совершающим периодические ходы сбора и загрузки, чтобы направляться порциями в прессовальную камеру (при ходе загрузки подгребателя 6), в которой прессовальный поршень 7 возвратно-поступательного движения прессует убранную массу G в тюки В. Готовые тюки В выходят из пресс-упаковщика 3 сзади.
Аппараты 4, 5, 6, 7 пресс-упаковщика 3 снабжаются приводной мощностью от трактора 2 через приводной вал 8, который соединен с задним валом 19 отбора мощности трактора 2. Источником мощности служит приводной двигатель 9 трактора 2, который может приводиться в соединение с валом 19 отбора мощности посредством механизма 14 сцепления и торможения. В присоединенном состоянии приводной двигатель 9 трактора 2, механизм 14 сцепления, вал 19 отбора мощности и приводной вал 8 образуют трансмиссию привода пресс-упаковщика 3. Для разветвления передаваемой на пресс-упаковщик 3 мощности на его отдельные аппараты 4, 5, 6, 7 служат непоказанные здесь передаточные механизмы. Кроме того, пресс-упаковщик 3 оснащен узловязальным устройством 15. Оно известным образом содержит узловязальный блок с узловязателем 20 и иглой 18. В показанном пресс-упаковщике 3 узловязальное устройство 15 содержит шесть узловязальных блоков (на чертеже виден только один из них), которые по отношению к продольному направлению машины (оно соответствует стрелке V) расположены рядом друг с другом, чтобы одновременно закреплять тюк В по ширине шестью обвязками. Игла 18 каждого узловязального блока служит для того, чтобы после каждого процесса прессования тюка В направлять участок шпагата 21 снизу через прессовальную камеру вверх к соответствующему узловязателю 20. После этого узловязатель 20 связывает поданный участок шпагата 21 с участком шпагата 21, который удерживался узловязателем 20 с начала формирования тюка, чтобы обвязать тюк В с охватом по периметру.
При выполнении узла может случаться, что образованный узел остается висеть на элементе узловязателя 20, например, на так называемом крючке узловязателя. В этом случае обвязка следующего тюка может повреждать узловязатель 20, так как при процессе обвязки может происходить столкновение с еще не снятым узлом.
Во избежание этого на пресс-упаковщике 3 для каждого блока узловязателя предусмотрен датчик 16 узловязателя, предназначенный для того, чтобы воспринимать критические состояния (режимы), то есть, в частности, сбои в процессе обвязки.
Датчик 16 узловязателя связан сигнальной связью с расположенным на пресс-упаковщике 3 устройством 10 управления. В соответствии с этим устройство 10 управления непрерывно получает информацию о том, не достигло ли узловязальное устройство 15, - по меньшей мере, на одном из шести блоков узловязателя, - критического рабочего состояния. Устройство 10 управления также связано системной шиной 13 данных, предпочтительно шиной ISOBUS, с трактором 2. В частности, для этого в кабине 12 водителя трактора 2 расположен блок 11 управления и отображения, который через посредство системной шины 13 данных может связываться с устройством 10 управления. Блок 11 управления и отображения снабжен помимо элементов управления также оптическим устройством отображения (например, монитором) для отображения рабочих параметров для водителя. Помимо прочего на устройстве отображения может указываться состояние отдельных блоков узловязателя. Кроме того, устройство 10 управления связано через системную шину 13 данных с механизмом 14 сцепления и торможения.
Механизм 14 сцепления и торможения в своем включенном состоянии устанавливает приводное соединение между приводным двигателем 9 и валом 19 отбора мощности трактора 2. Таким образом, при включенном состоянии механизма 14 сцепления и торможения пресс-упаковщик приводится своим приводным валом 8, который соединен с валом 19 отбора мощности трактора. В противоположность этому в отключенном состоянии механизма 14 сцепления и торможения приводное соединение между приводным двигателем 9 и валом 19 отбора мощности трактора прервано, причем в этом случае вал 19 отбора мощности не просто отсоединен (и вращается свободно), а предпочтительно дополнительно заторможен механизмом 14 сцепления и торможения. Таким образом, в отключенном состоянии механизма 14 сцепления и торможения приводное соединение между трактором 2 и пресс-упаковщиком 3 прервано. При этом вследствие торможения вала 19 отбора мощности пресс-упаковщик 3 также тормозится, так что рабочие аппараты 4, 5, 6, 7, включая узловязальное устройство 15, останавливаются в течение короткого времени.
Во избежание повреждения пресс-упаковщика 3, которое может вызываться, в частности, ошибками в работе узловязального устройства 15, устройство 10 управления непрерывно проводит наблюдение за состоянием узловязального устройства 15 посредством датчиков 16 узловязателей. Как только один из датчиков 16 узловязателей передает на устройство 10 управления сигнал, указывающий на ошибочное функционирование (например, не снятый узел), устройство 10 управления подает через системную шину 13 данных управляющий сигнал на механизм 14 сцепления и торможения, чтобы как можно скорее выполнить остановку приводного вала 8, а вместе с тем и привода пресс-упаковщика 3. Предпочтительно для водителя на блоке управления и отображения указывается диагноз ошибки, так что он может предпринять соответствующие меры (остановку сцепки 1, контроль или устранение ошибки в пресс-упаковщике 3). В частности, при этом водителю может указываться, на каком из блоков узловязателей произошла ошибка.
За счет автоматического отключения вала 19 отбора мощности при ошибочной обвязке водитель выгодным образом освобождается от нагрузки внимательно следить за узловязальным устройством 15 в ходе уборки. При этом в соответствии с принципом решения автоматическое отключение производится очень быстро, что позволяет более эффективно избегать повреждений функциональных элементов пресс-упаковщика 3, чем это было бы при наблюдении водителем и ручном управлении.
Перечень условных обозначений
1 Сцепка
2 Трактор
3 Пресс-упаковщик
4 Подборщик
5 Режущее устройство
6 Подгребатель
7 Прессовальный поршень
8 Приводной вал
9 Приводной двигатель
10 Устройство управления
11 Блок управления и отображения
12 Кабина водителя
13 Системная шина данных
14 Механизм сцепления и торможения
15 Узловязальное устройство
16 Датчик узловязателя
18 Игла
19 Вал отбора мощности
20 Узловязатель
21 Шпагат
S Валок
G Убранная масса
D Спрессованный тюк
V Скорость/направление движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЛОВЯЗАТЕЛЬ ДЛЯ ШПАГАТА | 2012 |
|
RU2599644C2 |
| ПРЕСС ДЛЯ ФОРМИРОВАНИЯ ПРЯМОУГОЛЬНЫХ ТЮКОВ | 2015 |
|
RU2682442C2 |
| КОМБИНАЦИЯ ТЯГАЧА И БУКСИРУЕМОЙ ИМ СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЫ | 2014 |
|
RU2637658C2 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЫЧАГА МЕХАНИЗМА НАТЯЖЕНИЯ ШПАГАТА | 2013 |
|
RU2644595C2 |
| ОБВЯЗОЧНОЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРЕССА ДЛЯ ФОРМИРОВАНИЯ КРУПНЫХ ТЮКОВ | 2009 |
|
RU2419279C1 |
| УЗЛОВЯЗАЛЬНАЯ СИСТЕМА ДЛЯ ПРЕСС-ПОДБОРЩИКА | 2013 |
|
RU2605332C2 |
| ПРЕСС-ПОДБОРЩИК И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2012 |
|
RU2581528C2 |
| МАШИНА ДЛЯ ПРЕССОВАНИЯ ТЮКОВ С ВЯЗАЛЬНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2464769C2 |
| МАШИНА ДЛЯ ПРЕССОВАНИЯ ЦИЛИНДРИЧЕСКИХ ТЮКОВ | 2008 |
|
RU2476062C2 |
| ТЮКОВЫЙ ПРЕСС-ПОДБОРЩИК И СПОСОБ ФОРМИРОВАНИЯ ТЮКА | 2015 |
|
RU2681576C2 |
Изобретение относится к сцепке из тягача, в частности трактора, и сельскохозяйственного пресс-упаковщика. Сцепка из тягача, в частности трактора, и сельскохозяйственного пресс-упаковщика, причем пресс-упаковщик содержит, по меньшей мере, один аппарат для транспортирования убранной массы и/или для прессования убранной массы в тюки, а также узловязальное устройство, и выполнен с возможностью его приведения в приводное соединение с тягачом для привода аппарата и узловязального устройства, причем она содержит устройство управления, выполненное с возможностью при достижении критического рабочего состояния узловязального устройства разрывать приводное соединение между тягачом и пресс-упаковщиком. Изобретение позволяет создать сцепку из тягача и пресс-упаковщика, в которой предотвращаются повреждения пресс-упаковщика вследствие сбоев, которые могут происходить в процессе обвязки и/или вязания узлов, и которая освобождает водителя от нагрузки по наблюдению за узловязальным устройством. 8 з.п. ф-лы, 1 ил.
1. Сцепка (1) из тягача (2), в частности трактора, и сельскохозяйственного пресс-упаковщика (3), причем пресс-упаковщик (3) содержит, по меньшей мере, один аппарат (4, 5, 6, 7) для транспортирования убранной массы (G) и/или для прессования убранной массы (G) в тюки (В), а также узловязальное устройство (15), и выполнен с возможностью его приведения в приводное соединение с тягачом (2) для привода аппарата (4, 5, 6, 7) и узловязального устройства (15), отличающаяся тем, что содержит устройство (10) управления, выполненное с возможностью при достижении критического рабочего состояния узловязального устройства (15) разрывать приводное соединение между тягачом (2) и пресс-упаковщиком (3).
2. Сцепка по п. 1, отличающаяся тем, что приводное соединение между пресс-упаковщиком (3) и тягачом (2) устанавливается через подключаемый и отключаемый вал (19) отбора мощности тягача (2), причем устройство (10) управления находится в сигнальной связи с тягачом для обеспечения отключения вала (19) отбора мощности при достижении критического рабочего состояния.
3. Сцепка по п. 2, отличающаяся тем, что пресс-упаковщик (3) выполнен с возможностью его привода посредством приводного вала (8), причем для тягача (2) предназначен механизм (14) сцепления, который выполнен с возможностью под действием управления посредством устройства (10) управления перемещаться между замкнутым состоянием, в котором имеется приводное соединение между приводным двигателем (9) тягача (2) и приводным валом (8) пресс-упаковщика (3), и разомкнутым состоянием, в котором приводное соединение разорвано.
4. Сцепка по п. 3, отличающаяся тем, что отключение вала (19) отбора мощности включает в себя торможение вала (19) отбора мощности посредством предусмотренного для механизма (14) сцепления тормозного устройства.
5. Сцепка по п. 3, отличающаяся тем, что устройство (10) управления относится к пресс-упаковщику (3), причем устройство (10) управления состоит в сигнальной связи с тягачом, в частности с механизмом (14) сцепления, для обеспечения возможности посредством управления тягачом (2), в частности, механизмом (14) сцепления, разрывать приводное соединение между тягачом (2) и пресс-упаковщиком (3).
6. Сцепка по любому из пп. 1-5, отличающаяся тем, что связь между устройством (10) управления и тягачом (2) осуществляется через системную шину (13) данных.
7. Сцепка по любому из пп. 1-5, отличающаяся тем, что для узловязального устройства (15) предназначен узловязатель (20) и, по меньшей мере, один датчик (16) для восприятия критического состояния узловязального устройства (15).
8. Сцепка по любому из пп. 1-5, отличающаяся тем, что критическое состояние узловязального устройства (15) является состоянием, при котором наступает повышенная опасность повреждения элементов узловязального устройства (15), в частности, в результате возможного столкновения между узловязателем (20), иглой (18) и/или образованным вязальным шпагатом (21) узлом.
9. Сцепка по любому из пп. 1-5, отличающаяся тем, что для узловязального устройства (15) предназначена система различных датчиков для восприятия рабочих состояний узловязального устройства (15), причем устройство (10) управления выполнено с возможностью при обнаружении предварительно заданных рабочих состояний делать заключение о критическом состоянии узловязального устройства (15) и вызывать разрыв приводного соединения.
| СОЧЕТАНИЕ ИНГИБИТОРА УСВОЕНИЯ 5-НТ С СЕЛЕКТИВНЫМ 5-НТ АНТАГОНИСТОМ | 1996 |
|
RU2183955C2 |
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2292085C1 |
| УСТРОЙСТВО ДЛЯ ДОПУСКОВОГО КОНТРОЛЯ РЕЖИМНЫХ ПАРАМЕТРОВ И СИГНАЛИЗАЦИИ АВАРИЙНОГО И НЕАДЕКВАТНОГО СОСТОЯНИЯ ФУНКЦИОНАЛЬНЫХ УЗЛОВ АВТОМОБИЛЯ | 1995 |
|
RU2108245C1 |

