Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения инфракрасного диапазона (СО) совместно с лазерным дальномером для сигнализационного прикрытия дороги, когда требуется определение направления движения обнаруженного нарушителя.
Как правило, маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Знание силами реагирования направления движения нарушителя имеет большое значение, так как позволяет сузить направление его поиска и тем самым повысить вероятность его обнаружения и задержания [1]. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание. Для этой задачи широко применяются пассивные оптико-электронные средства обнаружения с длиной зоны обнаружения (ЗО) 50-100 метров.
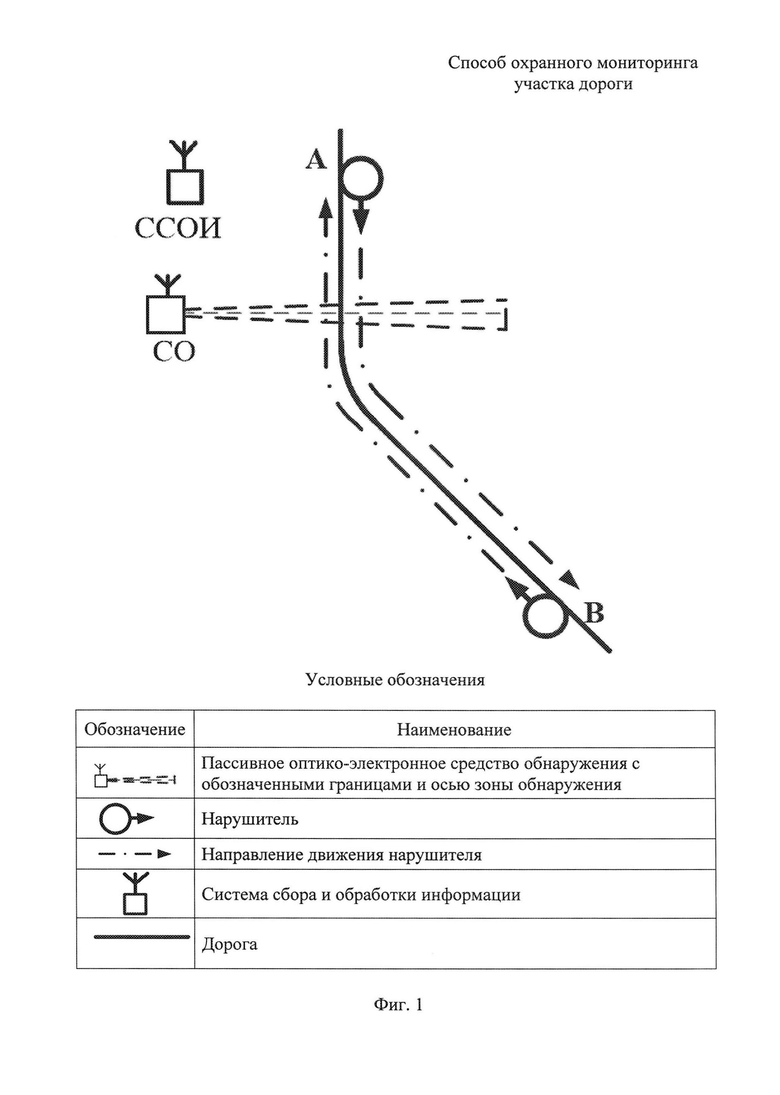
Известен способ охранного мониторинга, заключающийся в контроле дороги одним СО; в обеспечении регистрации системой сбора и обработки информации (ССОИ) сигналов тревог от СО при пересечении нарушителем его ЗО (фиг. 1) [2, 3].
Недостатком данного способа охранного мониторинга участка дороги является невозможность определения направления движения обнаруженного нарушителя.
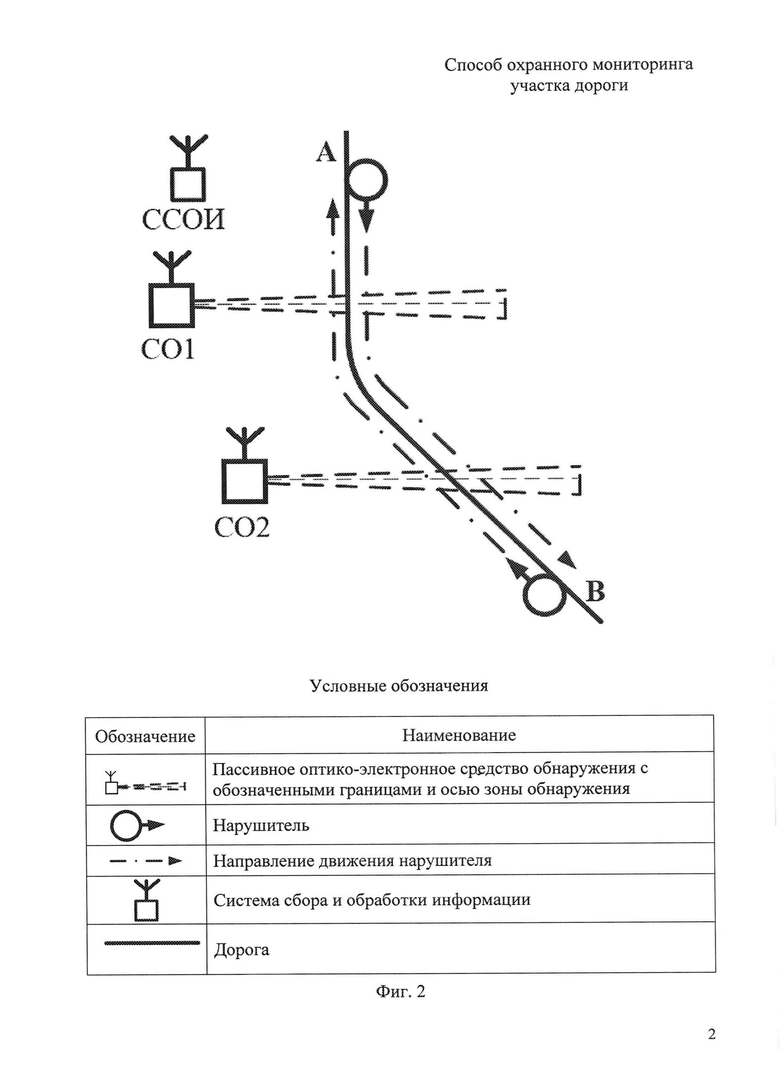
Известен другой способ охранного мониторинга участка дороги, заключающийся в контроле дороги двумя СО; в обеспечении регистрации ССОИ сигналов тревог от СО при пересечении нарушителем их ЗО; применении алгоритма определения направления движения обнаруженного нарушителя на основе анализа очередности поступления сигналов тревог от СО (фиг. 2) [2, 3].
Данный способ охранного мониторинга определяет направление движения обнаруженного нарушителя, однако для его реализации необходимо развертывание двух СО. Пассивное оптико-электронное средство обнаружения инфракрасного диапазона, предназначенное для применения в полевых условиях, в комплекте с литиевым источником питания и передатчиком для связи со ССОИ, имеет высокую стоимость, которая лежит в пределах от пятисот до несколько тысяч долларов [4].
Целью изобретения является получение возможности определения направления движения обнаруженного нарушителя с применением только одного СО.
Как правило, дорога, проходящая по участку местности, не является абсолютно прямой, одним из наиболее часто встречаемых элементов дорожной сети является изгиб дороги (дугообразный поворот, искривление дороги, состоящие из двух смежных прямых участков дороги, соединенных круговой кривой) [5].
В настоящее время рынок оптико-электронных средств предлагает широкий выбор лазерных дальномеров. Неоспоримым преимуществом лазерных дальномеров является их невысокая рыночная стоимость и простая техническая реализация. Средняя цена на лазерные дальномеры с дальностью измерения до 100 м (длина зоны обнаружения пассивного оптико-электронного средства обнаружения инфракрасного диапазона) не превышает 50 долларов, что более чем на порядок ниже стоимости рассматриваемых СО.
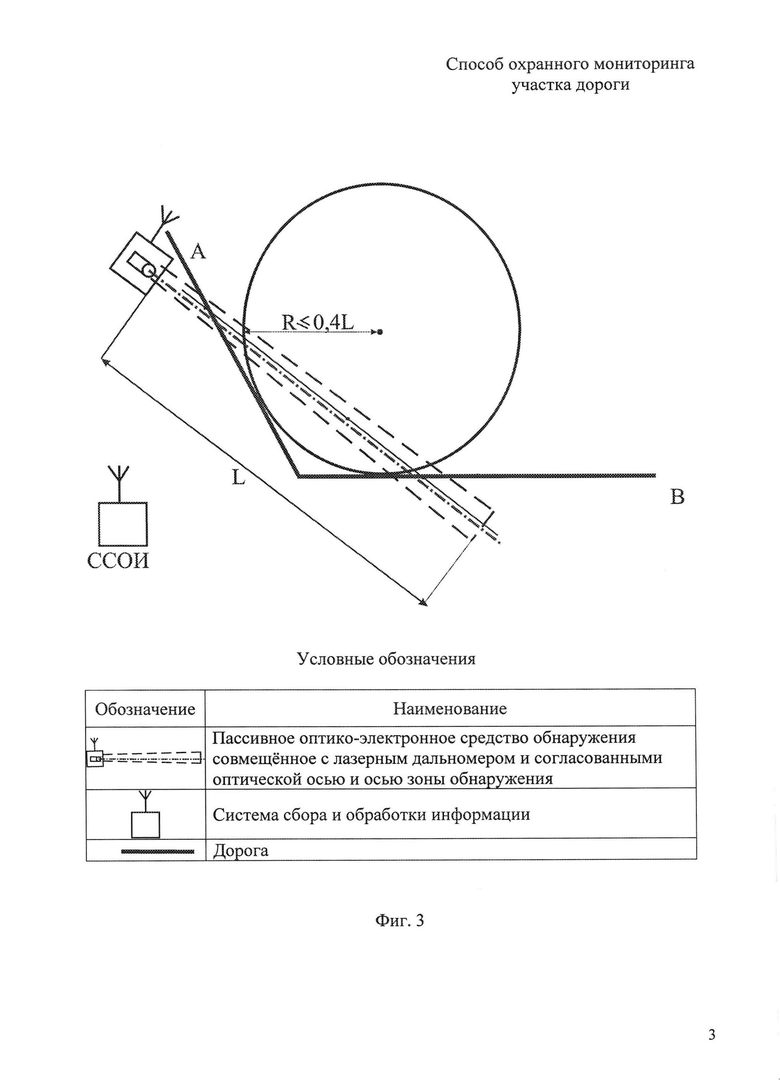
Для достижения поставленной цели разработан способ охранного мониторинга участка дороги, заключающийся в проведении оценки участка дороги для нахождения развертывании СО так, чтобы его ЗО пересекала дорогу на двух участках с обеих сторон от точки изгиба дороги; установке совместно со СО лазерного дальномера, оптическая ось которого согласована с осью ЗО СО; включении лазерного дальномера дважды по команде СО на время нахождения последнего в режим тревоги и измерении расстояния до нарушителя; обеспечении передачи сигнала тревоги от СО при пересечении нарушителем его ЗО и измеренных расстояний до него в систему сбора и обработки информации; применении алгоритма определения направления движения нарушителя по отношению расстояний, измеренных дальномером: если значение расстояния при первом сигнале тревоги больше, чем значение расстояния при втором сигнале тревоги, то направление движения нарушителя - в сторону к СО, если значение расстояния при первом сигнале тревоги меньше, чем значение расстояния при втором сигнале тревоги, то направление движения нарушителя - в сторону от СО (фиг. 3, 4).
Длины ЗО должно хватить, чтобы она пересекла дорогу в месте изгиба на двух участках, для этого выбирается изгиб дороги, радиус которого не превышает 40 процентов от длины зоны обнаружения (фиг. 3).
Если оптическая ось СО согласована с осью лазерного дальномера (оси параллельны друг другу и ось лазерного дальномера лежит внутри зоны обнаружения), то луч лазерного дальномера падает на нарушителя, находящегося в зоне обнаружения. Лазерный дальномер включается по команде СО на время нахождения последнего в режиме тревоги. Информация на ССОИ об измеренном расстоянии до нарушителя может передаваться через передатчик СО.
С учетом предлагаемой схемы развертывания СО и лазерного дальномера в зависимости от направления движения нарушителя через изгиб дороги он или приближается, или удаляется от СО. По отношению значения расстояния измеренного дальномером до нарушителя при первом сигнале тревоги и к значению расстояния измеренного дальномером до нарушителя при втором сигнале тревоги можно сделать вывод о направлении движения обнаруженного нарушителя:
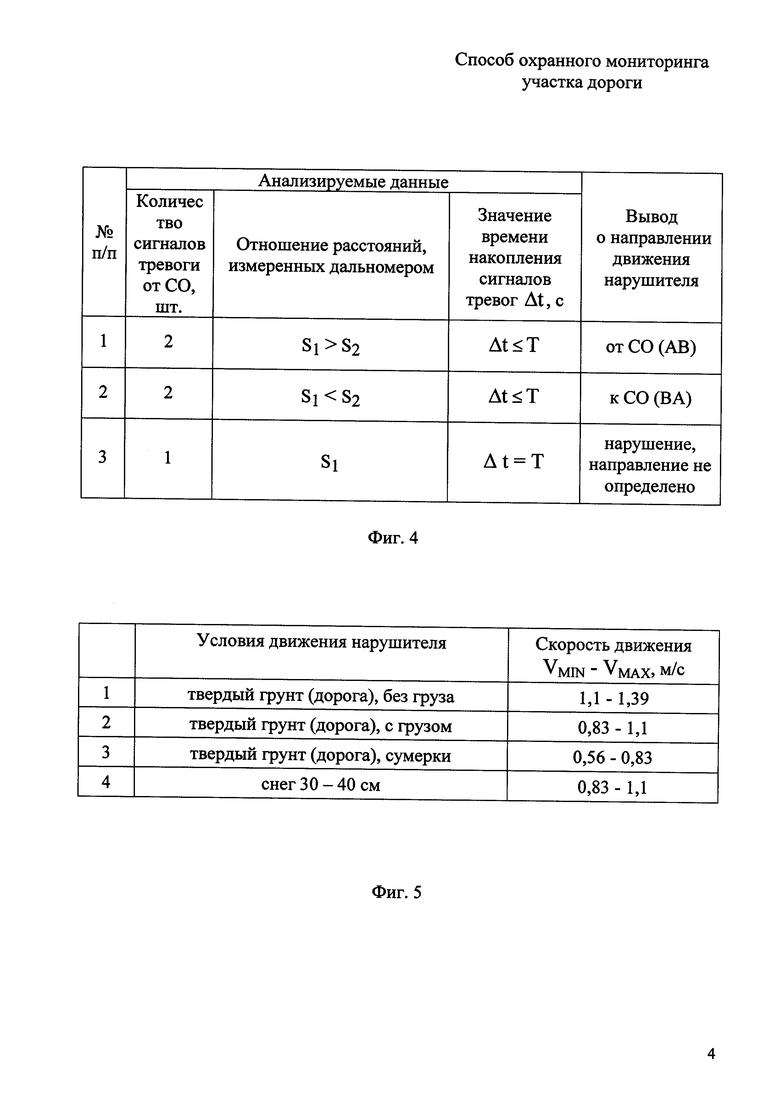
- если значение расстояния, измеренного дальномером до нарушителя при первом сигнале тревоги (S1), больше значения расстояния, измеренного дальномером до нарушителя при втором сигнале тревоги (S2), то направление движения нарушителя - в сторону к СО (направление ВА) (фиг. 3, 4);

- если значение расстояния, измеренное дальномером до нарушителя при первом сигнале тревоги (S1), меньше значения расстояния измеренного дальномером до нарушителя при втором сигнале тревоги (S2), то направление движения нарушителя - в сторону от СО (направление АВ) (фиг. 3, 4):

Для исключения ошибок вывода поступающие на ССОИ сигналы принимаются в течение установленного времени накопления сигналов тревог Δt. Максимальное значение времени накопления сигналов тревог (Т) определяется исходя из расстояния между двумя участками пресечения ЗО с дорогой, минимальной скорости движения нарушителя и коэффициента запаса 1,2 (фиг. 3, 5):

где Т - максимальное значение времени накопления сигналов тревог, с.
М - расстояние, проходимое нарушителем по дороге от одного участка пересечения зоны обнаружения с дорогой до другого, м;
VMIN - минимально возможная скорость движения нарушителя, м/с.
Минимально возможная скорость берется исходя из условий местности. Диапазон скоростей нарушителя на различных участках местности известен и подтвержден на основе экспериментальных исследований (фиг. 5). [5, 6]
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание по установленной схеме средства 1 обнаружения с передатчиком и дальномера 4 лазерного (фиг. 3).
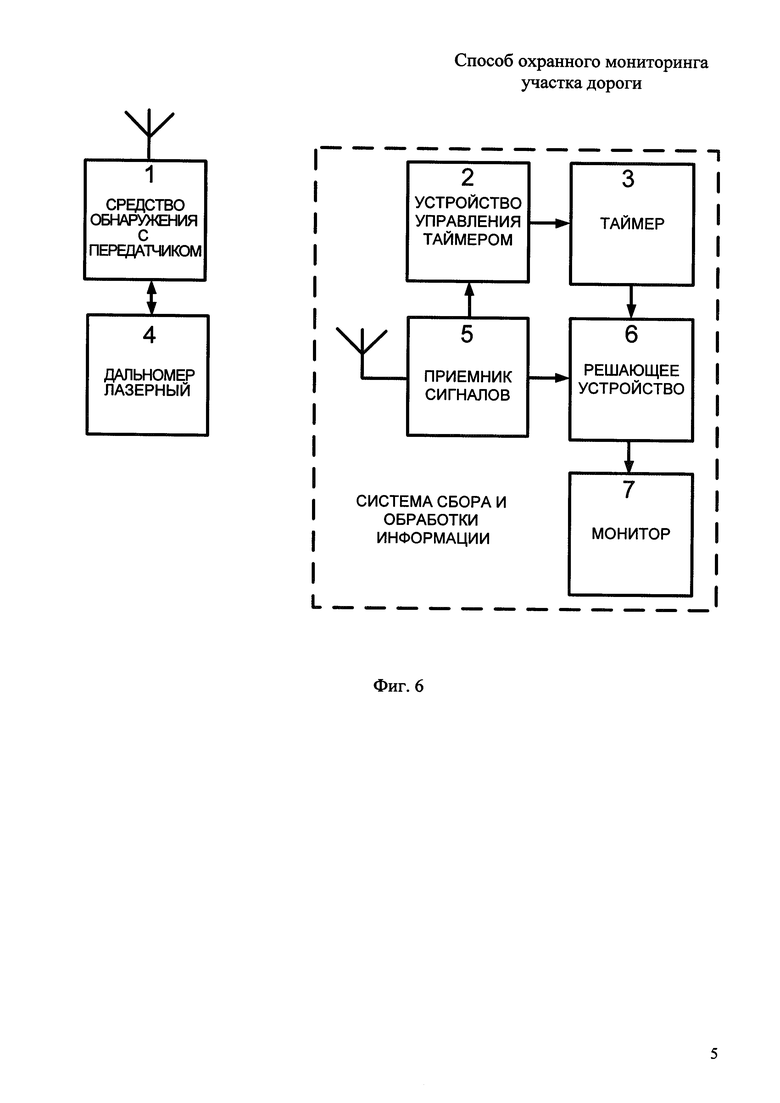
2. Развертывание на местности системы сбора и обработки информации, включающей в себя: устройство 2 решающее, монитор 3, приемник 5 сигналов (фиг. 6).
3. Определение максимального значения интервала времени накопления поступающих сигналов (Т) (формула 3).
4. Составление алгоритма определения направления движения нарушителя (таблицы принятия решения) и загрузку его в решающее устройство 2 (фиг. 4, 6).
Основной этап начинается при движении нарушителя через изгиб дороги и попадании его в ЗО СО, он включает:
1. Переход средства 1 обнаружения с передатчиком в режим тревоги, включение дальномера 4 лазерного по команде средства 1 обнаружения с передатчиком (фиг. 6).
2. Измерение дальномером 4 лазерным расстояния до нарушителя.
3. Передачу на ССОИ первого сигнала тревоги от средства 1 обнаружения с передатчиком и первого значения измеренного расстояния (фиг. 6).
4. Регистрацию приемником 5 сигнала тревоги и значения измеренного расстояния, запись первого значения расстояния в устройство 2 решающее (фиг. 6).
5. Запуск таймера 3 устройством 2 управления таймером, начало отсчета им времени накопления сигналов (фиг. 6).
6. Переходе средства 1 обнаружения в дежурный режим после выхода нарушителя из его зоны обнаружения (фиг. 6).
7. Выключение дальномера 4 лазерного по команде средства 1 обнаружения с передатчиком (фиг. 6).
8. Повторное пересечение зоны обнаружения нарушителем. Переход средства 1 обнаружения с передатчиком в режим тревоги, включение дальномера 4 лазерного по команде средства 1 обнаружения с передатчиком.
9. Измерение дальномером 4 лазерным расстояния до нарушителя.
10. Передачу на ССОИ второго сигнала тревоги от средства 1 обнаружения с передатчиком и второго значения измеренного расстояния.
11. Регистрацию приемником 5 сигнала тревоги и значения измеренного расстояния, запись второго значения расстояния в устройство 6 решающее (фиг. 6).
12. Переход средства 1 обнаружения с передатчиком в дежурный режим после выхода нарушителя из его зоны обнаружения (фиг. 6).
13. Выключение дальномера 4 лазерного по команде средства 1 обнаружения с передатчиком (фиг. 6).
14. Формирование решающим устройством 6 вывода о направлении движения нарушителя (фиг. 4).
15. В случае достижения времени накопления сигналов (Δt) максимального расчетного значения (Т) и непоступлении при этом второго сигнала от средства 1 обнаружения с передатчиком формирование вывода решающим устройством 6 о движении нарушителя через изгиб дороги без определения его направления (фиг. 4).
16. Выведение результата на монитор 7 (фиг. 6).
Сущность изобретения поясняется чертежами, где представлено:
- фиг. 1 - схема развертывания одного пассивного оптико-электронного средства обнаружения инфракрасного диапазона в известном способе охранного мониторинга участка дороги;
- фиг. 2 - схема развертывания двух пассивных оптико-электронных средств обнаружения инфракрасного диапазона в известном способе охранного мониторинга участка дороги;
- фиг. 3 - схема развертывания пассивного оптико-электронного средства обнаружения инфракрасного диапазона и лазерного дальномера в предлагаемом способе охранного мониторинга участка дороги;
- фиг. 4 - алгоритм определения направления движения нарушителя (таблица принятия решения);
- фиг. 5 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 6 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в получении возможности определения направления движения обнаруженного нарушителя с применением только одного СО.
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Магауенов Р.Г. - М.: Горячая - Телеком, 2004. - 367 с.
5. Псарев А.А. Военная топография: Учебник: - М.: Воениздат, 1986. - 384 с.
6. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
Изобретение относится к способу охранного мониторинга и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения инфракрасного диапазона (СО) совместно с лазерным дальномером для сигнализационного прикрытия дороги, когда требуется определение направления движения обнаруженного нарушителя. Способ заключается в проведении оценки участка дороги для нахождения изгиба дороги, радиус которого не превышает 40 процентов от длины зоны обнаружения (ЗО); развертывании СО так, чтобы его ЗО пересекала дорогу на двух участках с обеих сторон от точки изгиба дороги; установке совместно со СО лазерного дальномера, оптическая ось которого согласована с осью ЗО СО; включении лазерного дальномера дважды по команде СО на время нахождения последнего в режим тревоги и измерении расстояния до нарушителя; обеспечении передачи сигнала тревоги от СО при пересечении нарушителем его ЗО и измеренных расстояний до него в систему сбора и обработки информации; применении алгоритма определения направления движения нарушителя по отношению расстояний, измеренных дальномером: если значение расстояния при первом сигнале тревоги больше, чем значение расстояния при втором сигнале тревоги, то направление движения нарушителя - в сторону к СО, если значение расстояния при первом сигнале тревоги меньше, чем значение расстояния при втором сигнале тревоги, то направление движения нарушителя - в сторону от СО. Благодаря применению заявленного способа обеспечивается возможность определения направления движения обнаруженного нарушителя с применением только одного СО. 6 ил.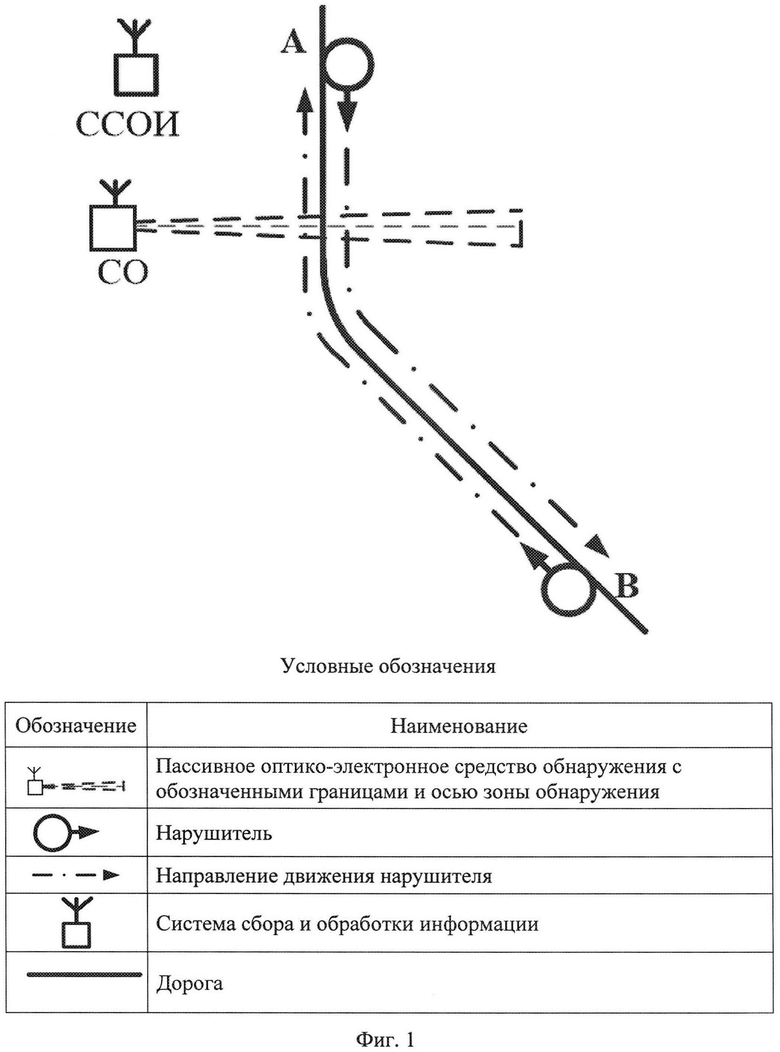
Способ охранного мониторинга участка дороги, заключающийся в контроле дороги пассивным оптико-электронным средством обнаружения инфракрасного диапазона; обеспечении передачи сигнала тревоги от средства при пересечении нарушителем его зоны обнаружения в систему сбора и обработки информации, отличающийся тем, что для определения места установки средства проводится оценка участка дороги для нахождения изгиба дороги, радиус которого не превышает 40 процентов от длины зоны обнаружения; средство развертывается так, чтобы его зона обнаружения пересекала дорогу на двух участках с обеих сторон от точки изгиба дороги; совместно со средством устанавливается лазерный дальномер, оптическая ось которого согласована с осью зоны обнаружения средства; лазерный дальномер дважды включается по команде средства на время нахождения последнего в режиме тревоги и измеряет расстояние до нарушителя; совместно с сигналами тревоги в систему сбора и обработки информации передается информация об измеренных расстояниях; применяется алгоритм определения направления движения нарушителя по отношению расстояний, измеренных дальномером: если значение расстояния при первом сигнале тревоги больше, чем значение расстояния при втором сигнале тревоги, то направление движения нарушителя - в сторону к средству обнаружения, если значение расстояния при первом сигнале тревоги меньше, чем значение расстояния при втором сигнале тревоги, то направление движения нарушителя - в сторону от средства обнаружения.
| US 6665631 B2, 16.12.2003 | |||
| Аппарат для автоматического выполнения совместной горизонтальной и вертикальной топографической съемки | 1932 |
|
SU37857A1 |
| US 9456301 B2, 27.09.2016 | |||
| US 7236880 B2, 26.06.2007 | |||
| Включающее приспособление для механических прессов и тому подобных механизмов | 1934 |
|
SU47546A1 |

