Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения двухлучевых пассивных инфракрасных средств обнаружения для сигнализационного контроля дорожной сети.
Как правило, маршрут движения нарушителя на местности проходит по имеющейся сети троп и дорог. Важным для сил реагирования является не только обнаружение нарушителя и определение направление его движения, но и его типа (пеший или на автомобиле), позволяющее правильно оценить цель и характер последующих действий нарушителя, и тем самым, выбрать наиболее эффективные действия по его поиску и задержанию. [1]
Для сигнализационного прикрытия сети троп и дорог широко применяются пассивные инфракрасные средства обнаружения (СО) с двухлучевой зоной обнаружения (ЗО). Анализ СО, применяемых для охраны участков местности, зарубежного производства («Rembass», «Rembass 2» - США, CLASSIC - Великобритания др.) и отечественного (РС-ИК - «Полюс-СТ», Радий БРК-ИК - «Umirs», Мангуст - «Стилсофт» и др.) показывает, что в них используется типовой пироэлектрический преобразователь состоящий из двух дифференциально включенных полусегментов (DUAL), геометрические размеры ЗО и основные характеристики этих средств имеют близкие друг к другу значения (фиг. 1). [2-6] Наиболее информативные из них («Rembass», «Rembass 2» - США, CLASSIC - Великобритания др.) определяют сторону пересечения двухлучевой ЗО по очередности поступления разнополярных импульсов полезного сигнала (положительный, отрицательный или отрицательный, положительный). [2] При этом двухлучевых СО, определяющих тип нарушителя - пеший или на автомобиле - нет. Известен способ распознавания типа нарушителя инфракрасным средством обнаружения, но он требует программной модернизации уже выпускаемой промышленностью СО. [7] Одним из наиболее распространенных элементов дорожной сети является Х-образное пересечение дорог.[8]
Известен способ обнаружения нарушителя распознавания его типа и направления движения с применением пассивных инфракрасных средств обнаружения, заключающийся в контроле Х-образного пересечения дорог средством 1 обнаружения и средством 2 обнаружения, средством 3 обнаружения, средством 4 обнаружения, установленными с противоположных сторон от расходящихся дорог так, чтобы ЗО каждого из них пересекала только одну дорогу; обнаружении средством 1 (2, 3, 4) обнаружения нарушителя при пересечении им его зоны обнаружения и определении стороны движения нарушителя: к центру Х-образного пересечения дорог или от центра X-образное пересечения дорог; обеспечении регистрации системой 5 сбора и обработки информации сигналов от средств 1 (2, 3, 4) обнаружения; вычислении временного интервала между ними и средней скорости нарушителя; распознавании системой 3 сбора и обработки информации типа нарушителя по скорости его движения: до 5 м/с - нарушитель 4 пеший, свыше 5 м/с - нарушитель 5 на автомобиле; в применении в системе 5 сбора и обработки информации алгоритма распознавания направления движения обнаруженного нарушителя по номеру средства обнаружения, выдавшего сигнал тревоги, и указанной им стороны движения нарушителя относительно центра X-образного пересечения дорог (фиг. 2). [9]
Одним из недостатков рассмотренного способа является высокая вероятность ошибки при распознавании типа нарушителя из-за возможной задержки поступления сигналов от СО на ССОИ и наложения двух скоростных диапазонов (пеший нарушитель может двигаться со скоростью больше 5 м/с, а автомобиль со скоростью ниже 5 м/с). [10] Причем, чем ниже проходимость дорог (троп) - тем больше наложение скоростных диапазонов и выше вероятность ошибки. Другим недостатком известного способа является применение четырех дорогостоящих СО. Так, рыночная стоимость СО, применяемых для охраны участков местности и входящих в состав мобильных сигнализационных комплексов, доходит до ста тысяч рублей.
Целью изобретения является получение возможности распознавания типа нарушителя - пеший нарушитель или нарушитель на автомобиле, направления его движения с низкой вероятностью ошибки и с применением только трех СО.
Для достижения поставленной цели разработан способ обнаружения нарушителя, распознавания его типа и направления движения с применением двухлучевых пассивных инфракрасных средств обнаружения, заключающийся в контроле X-образного пересечения дорог СО; установке двух из трех СО по диагонали с противоположных внутренних сторон X -образного пересечения дорог и ориентировании так, чтобы оптические оси их зон обнаружения (30) пересекали по две дороги; установке для каждого из трех СО минимально допустимого расстояния до дальней от него дороги, при котором ЗО человека и автомобиля СО пересекала только ближнюю к нему дорогу, а ЗО только автомобиля пересекала ближнюю и дальнюю дороги; установке третьего СО с внешней стороны X-образного пересечения дорог и ориентировании так, чтобы его ЗО человека и автомобиля пересекалась на дороге с ЗО только автомобиля одного СО, а ЗО только автомобиля пересекалась на другой дороге с ЗО человека и автомобиля оставшегося СО; обнаружении СО нарушителя и определении его стороны движения относительно центра X-образного пересечения дорог при пересечении им ЗО; в обеспечении регистрации системой сбора и обработки информации (ССОИ) сигналов от СО; установлении максимального времени накопления ССОИ сигналов от СО с момента поступления первого сигнала тревоги, исходя из минимально возможной скорости человека по дороге и расстояния, проходимого им между ЗО СО; применении алгоритма, распознающего тип нарушителя по числу сигналов тревоги, поступивших за установленное максимальное время накопления сигналов: один или два сигнала тревоги - ПН, три сигнала - НА; распознавании алгоритмом направления движения нарушителя по очередности передачи сигналов тревоги СО и указанным ими сторонам движения нарушителя относительно центра X-образного пересечения дорог (фиг. 3, 4).
Известно, что длина ЗО человека СО не менее чем в два раза меньше, чем автомобиля. [2, 3] Существенная разница в длине ЗО объясняется тем, что геометрические размеры автомобиля (длина от 2 м) сравнимы с размерами конусообразной ЗО в ее конце (от 3 м), тогда как размеры человека (ширина силуэта 0.3-0,4 м) в том же месте на порядок меньше. Температура автомобиля (двигатель, ходовая часть) существенно выше температуры человека. Известно, что чем больше размеры ЗО, одновременно перекрываемой объектом, и больше разница между температурами объекта и фона, тем выше амплитуда полезного сигнала. [3] Указанные различия между автомобиля и человеком объясняют разницу амплитуд полезного сигнала (от автомобиля амплитуда сигнала существенно выше при прочих равных условиях), а значит, автомобиль может быть обнаружен СО на значительно большем расстоянии чем человек.
При установке СО необходимо задаться минимально допустимым расстоянием от СО до дальней от него дороги (SMIN). Это минимальное расстояние должно быть больше длины ЗО человека, но меньше длины ЗО автомобиля (фиг. 3). Тогда при движении по любой из расходящихся дорог нарушитель на автомобиле будет обнаруживаться обоими СО, а при движении в пешем порядке только одним СО (тем, что находится ближе к дороге, по которой движется пеший нарушитель).
Минимальное допустимое расстояние от СО до дальнего от него дороги необходимо брать с учетом обеспечения исключения ошибок вывода о типе обнаруженного нарушителя, когда человек может быть случайно обнаружен СО на расстоянии, превышающем заявленное производителем (фиг. 3):

где SMIN - минимальное расстояние от средства обнаружения до дальнего от него дороги, м;
LАВТО _ максимальное длина зоны обнаружения автомобиля, м;
LЧЕЛ - максимальное длина зоны обнаружения человека, м.
Как правило, у двухлучевого СО максимальная длина ЗО человека - до 50 м, автомобиля - до 100 м. [2, 4-6] При таких характеристиках минимальное расстояние от СО до дальней от него дороги (SMIN) составит 75 м (см. формулу 1).
Пересекая участок местности нарушитель стремиться преодолеть его за максимально короткое время, поэтому двигается по сквозному направлению, т.е. направлению ведущему от исходного рубежа к конечному рубежу.
В предлагаемой схеме развертывания нарушитель двигаясь в любом сквозном направление пересекает оси зон обнаружения три раза, при этом ЗО только автомобиля от одного до двух раз (фиг. 3). Поэтому, алгоритм, применяемый в ССОИ, распознает тип нарушителя по следующим поступившим данным от СО (фиг. 4):
- если за установленное максимальное время накопления сигналов поступило три сигнала тревоги, то тип нарушителя - НА;
- если за установленное максимальное время накопления сигналов поступило два или один сигнал тревоги - ПН.
Дополнительный анализ комбинаций очередности передачи сигналов тревоги от СО и указанных ими сторон движения нарушителя относительно центра X-образного пересечения дорог позволяет определить сторону движения нарушителя (фиг. 4).
Максимальное время накопления сигналов от СО с момента поступления первого сигнала тревоги (Т) устанавливается для исключения ошибок вывода о типе обнаруженного объекта в ССОИ. Максимальное время накопления сигналов от СО определяется исходя из минимально возможной скорости человека по дороге и максимального расстояния между оптическими осями ЗО, проходимого нарушителем, и берется с коэффициента запаса 1,2:

где Т - максимальное время накопления сигналов от СО с момента поступления первого сигнала тревоги, с.
Н - максимальное расстояние между оптическими осями ЗО, проходимое нарушителем, м;
VMIN _ минимально возможная скорость движения нарушителя, м/с.
Максимальное расстояние между оптическими осями ЗО, проходимое нарушителем, берется как сумма длин двух наибольших отрезков: OA', OB', ОС, OD' (фиг. 3). Минимально возможная скорость нарушителя берется исходя из условий местности. Диапазон скоростей нарушителя на различных участках местности известен и подтвержден на основе экспериментальных исследований (фиг. 5). [8, 10]
Способ обнаружения нарушителя, распознавания его типа и направления движения с применением двухлучевых пассивных инфракрасных средств обнаружения включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Развертывание средства 1 обнаружения с передатчиком, средства 2 обнаружения с передатчиком и средства 3 обнаружения с передатчиком на X-образном пересечении дорог по установленной схеме и с учетом рассчитанного минимального расстояния (SMIN) от средства 1 (2, 3) обнаружения с передатчиком до дальней от него дороги (фиг. 3), (формула 1).
2. Развертывание на местности системы 5 сбора и обработки информации, включающей в себя устройство 6 управления таймером, таймер 7, приемник 8 сигналов, решающее устройство 9 и монитор 10 (фиг. 6).
3. Расчет максимального времени накопления сигналов тревог от СО с момента поступления от него первого сигнала тревоги (Т) и загрузку его в решающее устройство 9 (формула 2).
4. Начало работы средства 1 обнаружения с передатчиком, средства 2 обнаружения с передатчиком и средства 3 обнаружения с передатчиком в дежурном режиме.
Основной этап начинается при пересечении нарушителем ЗО одного из СО: средства 1 обнаружения с передатчиком, средства 2 обнаружения с передатчиком или средства 3 обнаружения с передатчиком, он включает:
1. Переход средства 1 (2, 3) обнаружения с передатчиком в режим тревоги, определение стороны движения нарушителя и передачу сигнала системе 5 сбора и обработки информации (фиг. 6).
2. Регистрацию сигнала приемником 8 сигналов от средства 1 (2, 3) обнаружения с передатчиком, запуском таймера 7 устройством 6 управления таймером, начало отсчета им времени накопления сигналов тревог (фиг. 6).
3. Запись информации в устройство 9 решающее (фиг. 6).
4. Автоматический переход средства 1 (2, 3) обнаружения с передатчиком в дежурный режим после выхода нарушителя из зоны обнаружения (фиг. 6).
5. В зависимости от типа нарушителя и направления его движения окончание регистрации или регистрацию еще одного или двух сигналов тревог от средств 1 (2, 3) обнаружения с передатчиком приемником 8 системы 5 сбора и обработки информации (фиг. 4, 6).
6. Запись информации в устройство 9 решающее (фиг. 6).
7. Передачей таймером 7 сигнала на устройство 9 решающее о достижении времени накопления сигналов тревог от средства обнаружения с момента поступления от него первого сигнала тревоги максимального значения (Т) (фиг. 6), (формула 2).
8. Формирование вывода о типе нарушителя и направлении его движения устройством 9 решающим (фиг. 6).
9. Обнуление таймера 7 устройством 6 управления таймером. Выведение результата о типе нарушителя и направлении его движения на монитор 10 (фиг. 6).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - обобщенные основные характеристики двухлучевых пассивных инфракрасных средств обнаружения;
- фиг. 2 - схема развертывания четырех двухлучевых пассивных инфракрасных средств обнаружения в известном способе обнаружения нарушителя, распознавания его типа и направления движения с применением двухлучевых пассивных инфракрасных средств обнаружения;
- фиг. 3 - схема развертывания двухлучевых пассивных инфракрасных средств обнаружения в предлагаемом способе обнаружения нарушителя, распознавания его типа и направления движения с применением двухлучевых пассивных инфракрасных средств обнаружения;
- фиг. 4 - таблица принятия решения о типе нарушителя и направлении его движения (алгоритм) в предлагаемом способе обнаружения нарушителя, распознавания его типа и направления движения с применением двухлучевых пассивных инфракрасных средств обнаружения;
- фиг. 5 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 6 - структурная схема взаимосвязи применяемых устройств при реализации предлагаемого способа обнаружения нарушителя, распознавания его типа и направления движения с применением двухлучевых пассивных инфракрасных средств обнаружения.
Технический результат заключается в получении возможности распознавания типа нарушителя - пеший нарушитель или нарушитель на автомобиле, направления его движения с низкой вероятностью ошибки и с применением только трех СО.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Груба, И. Системы охранной сигнализации. Технические средства обнаружения / И. Груба. - М.: Солон-пресс, 2012. - 220 с.
3. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
4. Звежинский, С.С. Быстроразвертываемые средства обнаружения и системы охранной сигнализации // Специальная техника. - 2003. - №5. - С. 11-23.
5. РСК «Радиобарьер-МФ». Руководство по эксплуатации ПМЕК.424242.9000РЭ - М: «Полюс-СТ», 2011. - 65 с.
6. Мобильный комплекс охраны участка местности «Мангуст». Руководство по эксплуатации СТВФ.425624.001 РЭ - Ставрополь: «Стилсофт», 2017. - 52 с.
7. Пат. 2712648 Российская Федерация, МПК51 G08B 13/19 Способ распознавания типа нарушителя инфракрасным средством обнаружения / С.А. Удот, И.Д. Соболь - №2019114471; заявл. 08.05.19; опубл. 30.01.20, Бюл. №4.
8. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
9. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
10. Баленко, С.В. Школа выживания. - М., 1994. - 140 с.
Изобретение относится к способам охранного мониторинга местности и может быть использовано в случаях применения двухлучевых пассивных инфракрасных средств обнаружения (СО) для сигнализационного контроля дорожной сети. Способ заключается в контроле X-образного пересечения дорог (ХПД) СО; установке двух из трех СО по диагонали с противоположных внутренних сторон ХПД и ориентировании так, чтобы оптические оси их зон обнаружения (ЗО) пересекали по две дороги; установке для каждого из трех СО минимально допустимого расстояния до дальней от него дороги, при котором ЗО человека и автомобиля СО пересекала только ближнюю к нему дорогу, а ЗО только автомобиля пересекала только дальнюю дорогу; установке третьего СО с внешней стороны ХПД и ориентировании так, чтобы его ЗО человека и автомобиля пересекалась на дороге с ЗО только автомобиля одного СО, а ЗО только автомобиля пересекалась на другой дороге с ЗО человека и автомобиля оставшегося СО; обнаружении СО нарушителя и определении его стороны движения относительно центра ХПД при пересечении им ЗО; в обеспечении регистрации системой сбора и обработки информации (ССОИ) сигналов от СО; установлении максимального времени накопления ССОИ сигналов от СО с момента поступления первого сигнала тревоги исходя из минимально возможной скорости человека по дороге и расстояния, проходимого им между ЗО СО; применении алгоритма распознавания типа нарушителя по числу сигналов тревоги, поступивших за установленное максимальное время накопления сигналов: один или два сигнала тревоги - ПН, три сигнала - НА; распознавании алгоритмом направления движения нарушителя по очередности передачи сигналов тревоги СО и указанным ими сторонам движения нарушителя относительно центра ХПД. Способ включает подготовительный этап с развертыванием по разработанной схеме СО на ХПД и основной этап, который начинается с поступлением сигнала тревоги и заканчивается формированием вывода о типе обнаруженного нарушителя: ПН или НА и направлении его движения. Технический результат заключается в получении возможности распознавания типа нарушителя - ПН или НА с низкой вероятностью ошибки и с применением только трех СО. 6 ил.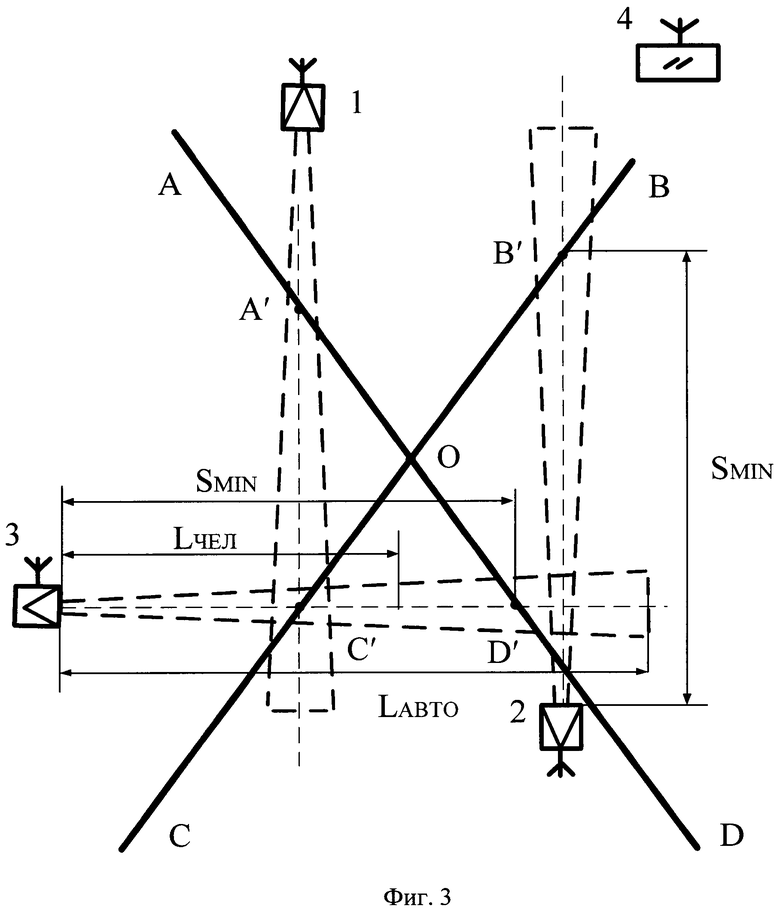
Способ обнаружения нарушителя, распознавания его типа и направления движения с применением двухлучевых пассивных инфракрасных средств обнаружения, заключающийся в контроле X-образного пересечения дорог двухлучевыми пассивными инфракрасными средствами обнаружения; обнаружении средством обнаружения нарушителя и определении его стороны движения при пересечении им зоны обнаружения; в обеспечении регистрации системой сбора и обработки информации сигналов от средства обнаружения; установлении максимального времени накопления системой сбора и обработки информации сигналов от средств обнаружения с момента поступления первого сигнала тревоги исходя из минимально возможной скорости человека по дороге и расстояния, проходимого им между зонами обнаружения средств обнаружения, отличающийся тем, что два из трех средств обнаружения устанавливаются по диагонали с противоположных внутренних сторон X-образного пересечения дорог и ориентируются так, чтобы их зоны обнаружения пересекали по две дороги; для каждого из трех средств обнаружения устанавливается минимальное допустимое расстояние до дальней от него дороги, при котором зона обнаружения человека и автомобиля средством обнаружения пересекала только ближнюю к нему дорогу, а зона обнаружения только автомобиля пересекала только дальнюю дорогу; третье средство обнаружения устанавливается с внешней стороны X-образного пересечения дорог и ориентируются так, чтобы его зона обнаружения человека и автомобиля пересекалась на дороге с зоной обнаружения только автомобиля одного средства обнаружения, а зона обнаружения только автомобиля пересекалась на другой дороге с зоной обнаружения человека и автомобиля оставшегося средства обнаружения; применяется алгоритм, распознающий тип нарушителя по числу сигналов тревоги, поступивших за установленное максимальное время накопления сигналов: один или два сигнала тревоги - пеший нарушитель, три сигнала - нарушитель на автомобиле; алгоритм распознает направление движения нарушителя по очередности передачи сигналов тревоги средствами обнаружения и указанным ими сторонам движения нарушителя относительно центра X-образного пересечения дорог.
| СПОСОБ ОХРАННОГО МОНИТОРИНГА УЧАСТКА ДОРОГИ | 2017 |
|
RU2645204C1 |
| МНОГОЗОНАЛЬНАЯ РАДИОВОЛНОВАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2013 |
|
RU2557481C1 |
| Способ формования обувной заготовки | 1952 |
|
SU96837A1 |
| US 6246320 B1, 12.06.2001 | |||
| WO 2016011274 A1, 21.01.2016 | |||
| CN 109389791 A, 26.02.2019. | |||

