Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения инфракрасного диапазона для сигнализационного контроля места пересечения трех дорог.
Как правило, маршрут движения нарушителя на местности проходит по имеющейся сети троп и дорог. Знание силами реагирования направления движения нарушителя имеет большое значение, так как позволяет сузить направление его поиска и тем самым повысить вероятность его обнаружения и задержания [1]. Поэтому, сигнализационному прикрытию сети троп и дорог уделяется значительное внимание. Для этой задачи широко применяются пассивные оптико-электронные средства обнаружения инфракрасного диапазона (СО) с длинной зоны обнаружения нарушителя (ЗО) до 50 метров. Известны СО, которые определяют не только факт нарушения, но и сторону движения объекта относительно оси ЗО СО [2].
Одним из наиболее часто встречаемых элементов дорожной сети является пересечение трех дорог, состоящее из трех участков дорог выходящих из одной точки. [3]
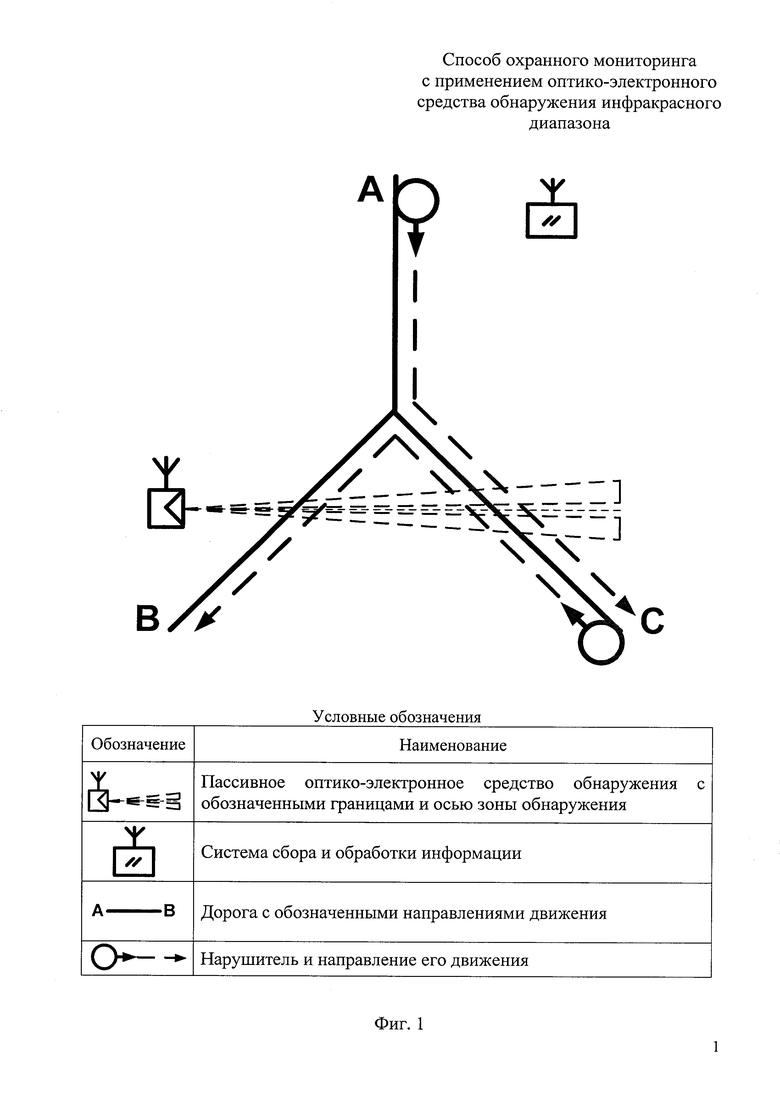
Известен способ охранного мониторинга с применением СО, заключающийся в контроле места пересечения трех дорог одним СО с двухлучевой зоной обнаружения; переходе СО один или два раза в режим тревоги в зависимости от направления движения нарушителя через место пересечения трех дорог; определении СО стороны движения нарушителя относительно оси ЗО по последовательности поступления разнополярных импульсов полезного сигнала с пироприемника; в обеспечении регистрации системой сбора и обработки информации (ССОИ) сигналов тревоги и информации о стороне движения нарушителя относительно оси ЗО СО (фиг. 1). [4, 5]
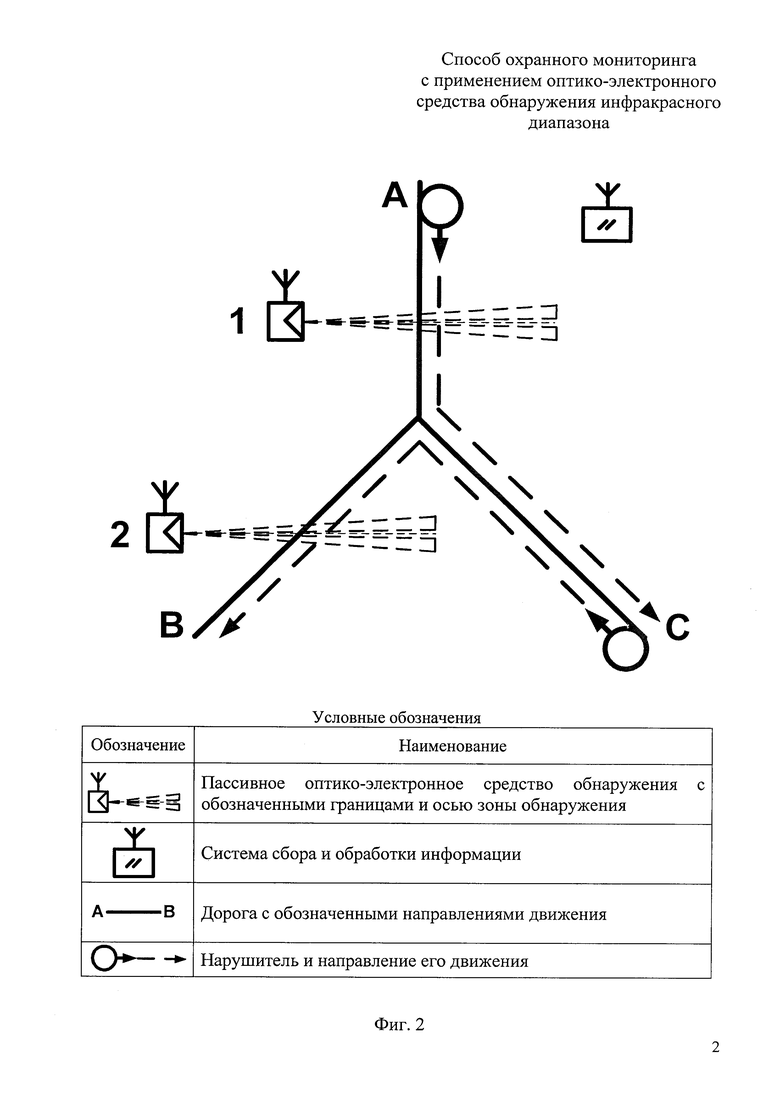
Известен другой способ охранного мониторинга, заключающийся в контроле места пересечения трех дорог двумя СО с двухлучевыми ЗО; в определении СО стороны движения нарушителя относительно оси ЗО по последовательности поступления разнополярных импульсов полезного сигнала с пироприемника; в обеспечении регистрации ССОИ сигналов тревог и информации о стороне движения нарушителя относительно оси ЗО, применении алгоритма определения направления движения обнаруженного нарушителя на основе анализа очередности поступления сигналов тревог от разных СО и стороны движения нарушителя относительно оси ЗО (фиг. 2). [4, 5]
Недостатком первого указанного способа охранного мониторинга является низкая точность указания направления движения обнаруженного нарушителя (шесть направлений определяются попарно: АВ или АС, ВА или СА, ВС или СВ).
Второй указанный способ охранного мониторинга имеет высокую точность определения направления движения нарушителя (шесть направлений определяются раздельно), но требует для реализации применения двух СО.
Целью изобретения является получение возможности раздельного определения всех шести направлений движения нарушителя через место пересечения трех дорог с применением одного СО.
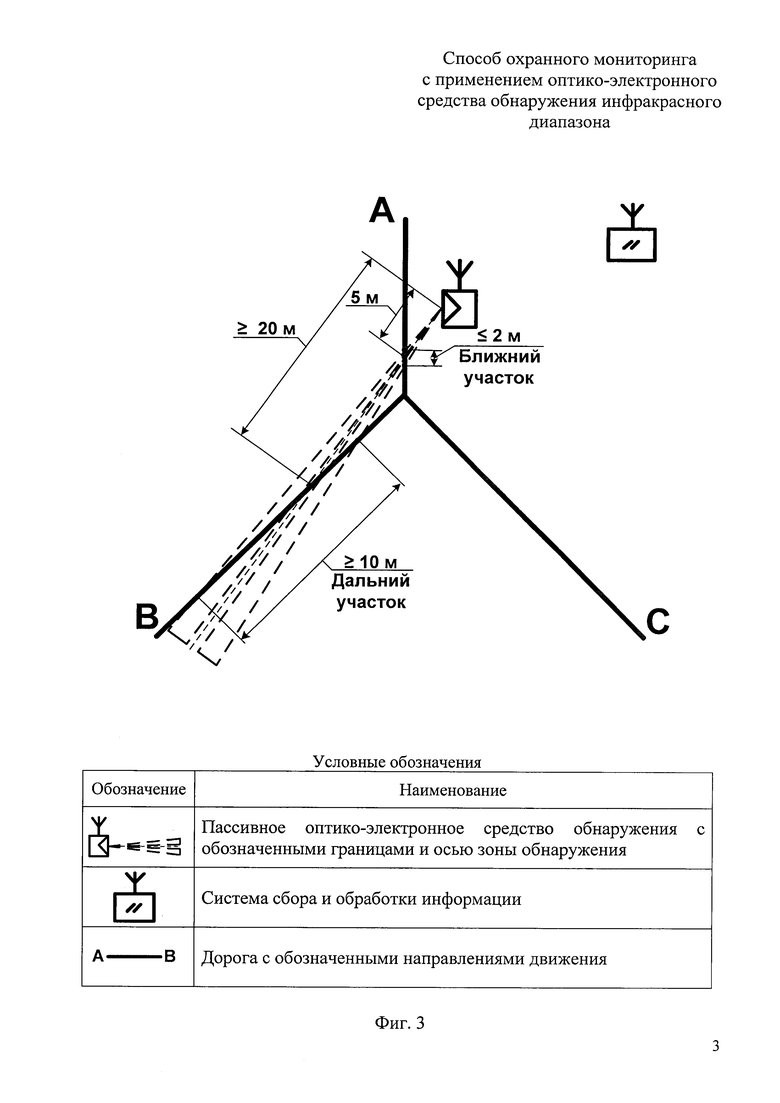
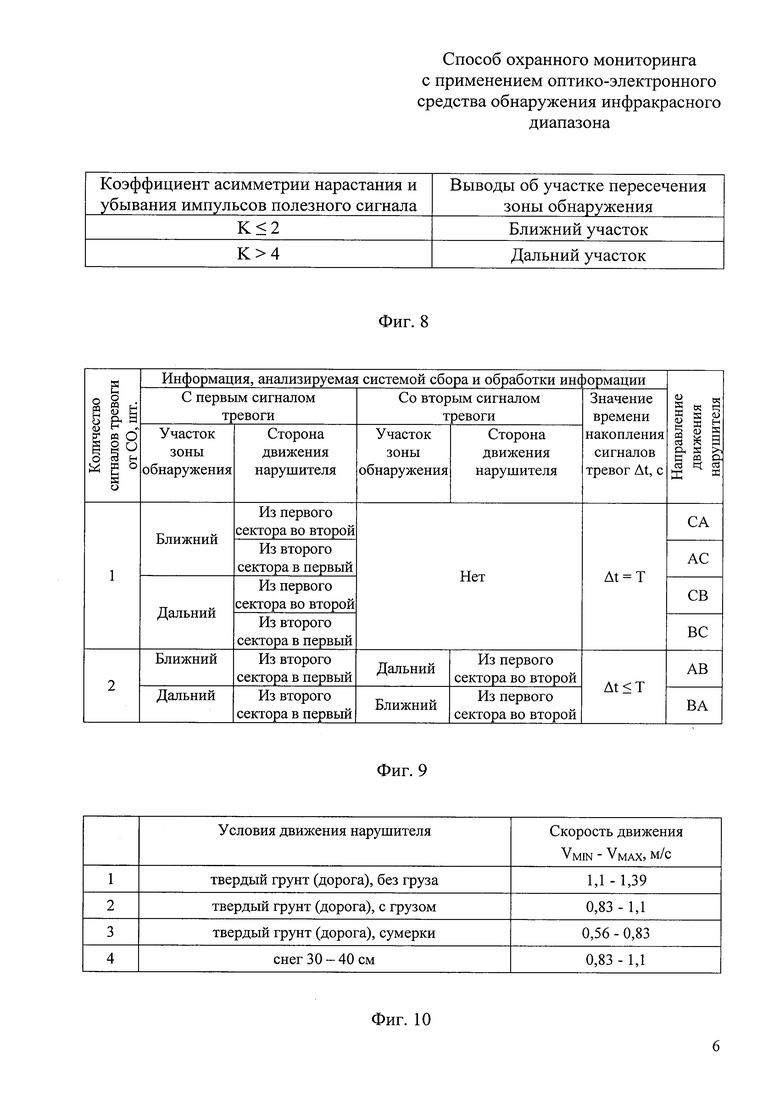
Для достижения поставленной цели разработан способ охранного мониторинга с применением оптико-электронного средства обнаружения инфракрасного диапазона, заключающийся в развертывании одного СО в близи пересечения трех дорог по схеме, в которой ближний участок его ЗО (до 5 метров от СО) пересекает одну дорогу, дальний участок ЗО (от 20 метров от СО и более) пересекает другую дорогу закрывая не менее 10 метров этой дороги; переходе СО один или два раза в режим тревоги в зависимости от направления движения нарушителя через место пересечения трех дорог; определении СО пересечения нарушителем ближнего участка ЗО по коэффициенту асимметрии длительности нарастания и убывания импульсов полезного сигнала не более двух, пересечения нарушителем дальнего участка по коэффициенту асимметрии длительности нарастания и убывания импульсов полезного сигнала более четырех, стороны движения нарушителя относительно оси ЗО по последовательности поступления разнополярных импульсов полезного сигнала; определении ССОИ направления движения нарушителя по информации от СО с учетом его схемы развертывания: четыре направления движения по наличию только одного сигнала тревоги, информации о пересечении нарушителем ближнего или дальнего участка и стороны его движения относительно оси ЗО, другие два направления по двум сигналам тревоги и очередности поступления сигнала о пересечении нарушителем ближнего и дальнего участков и стороны его движения относительно оси ЗО; установлении максимального значения времени ожидания ССОИ второго сигнала тревоги исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения ЗО с дорогой (фиг. 3).
Известно, что принцип действия пассивных оптико-электронных средств обнаружения основан на регистрации сигналов, порождаемых тепловым потоком, излучаемым объектом обнаружения (нарушителем). [4, 6]
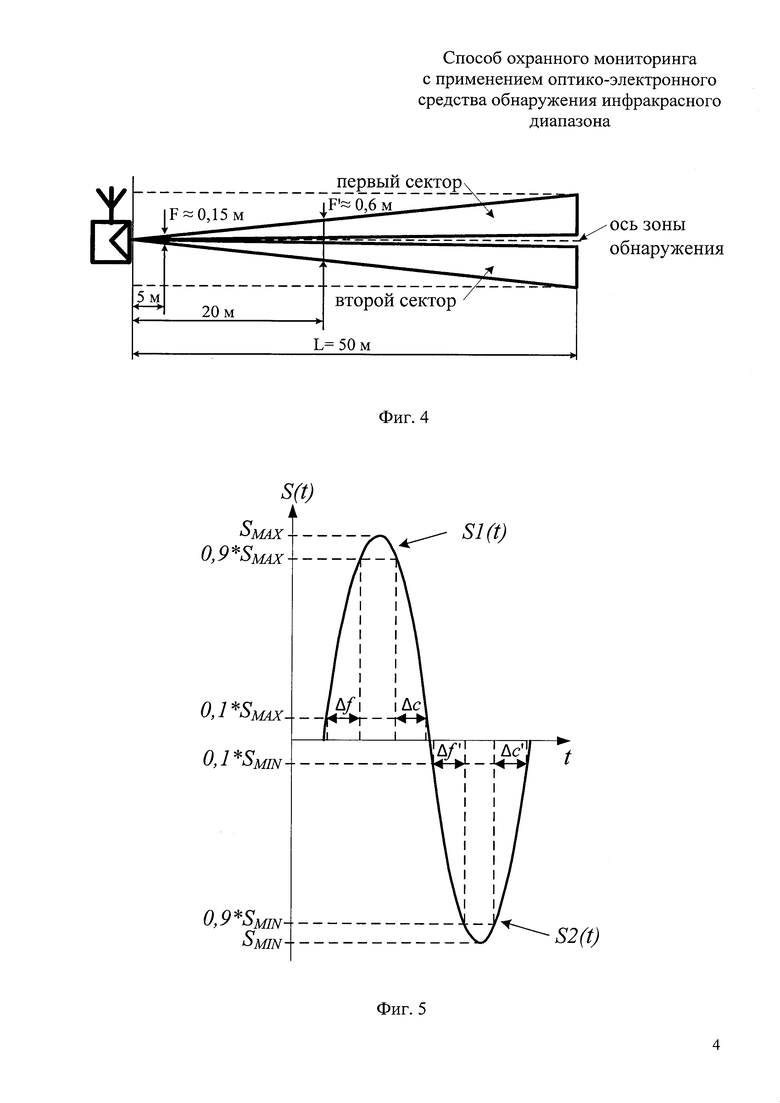
Известно, что чувствительный элемент СО (пироприемник) состоит из двух дифференциально включенных полусегментов (первого и второго) образующих разностную систему [4, 6]. Данные сегменты в совокупности с оптической системой формируют конусообразную ЗО СО состоящую из двух секторов (фиг. 4). Ширина ЗО СО в нескольких метрах от СО (F) - десятые доли метра, ближе к середине ЗО СО (F') - около 0,6 метра (фиг. 4).
При входе нарушителя в сектор ЗО формируется положительный потенциал на соответствующем полусегменте пироприемника. В связи с тем, что сегменты подключены дифференциально результирующий полезный сигнал с пироприемника определяется [4, 6] (фиг. 5):

где S(t) - полезный сигнал пироприемника, мкВ (фиг. 5);
S1(t) - сигнал, образованный на первом полусегменте пироприемника СО, мкВ (фиг. 5);
S2(t) - сигнал, образованный на втором полусегменте пироприемника СО, мкВ (фиг. 5).
Так, при входе нарушителя сначала в первый сектор ЗО уровень полезного сигнала увеличивается, а при переходе во второй сектор ЗО - уменьшается (фиг. 5). И наоборот, при входе нарушителя сначала во второй сектор ЗО уровень полезного сигнала сначала уменьшается, при переходе в первый сектор ЗО - увеличивается.
С учетом выражения (1) по последовательности поступления разнополярных импульсов полезного сигнала с пироприемника определяется сторона движения нарушителя относительно оси ЗО СО:
- если в течении тревоги положительный импульс полезного сигнала сменился отрицательным импульсом - нарушитель двигался относительно оси ЗО из первого сектора во второй;
- если в течении тревоги отрицательный импульс полезного сигнала сменился положительным импульсом - нарушитель двигался относительно оси ЗО из второго сектора в первый.
Однако, этих признаков недостаточно, чтобы определять все 6 направлений движения нарушителя через место пересечение трех дорог раздельно.
Предлагается при охранном мониторинге места пересечения трех дорог разворачивать СО так, чтобы получить два участка пересечения ЗО с дорогами: ближний до 5 метров от СО и дальний от 20 метров от СО и более (фиг. 3).
Поскольку полезный сигнал с пироприемника при движении нарушителя в ЗО не является идеальным по форме (фиг. 5), то в нем будет наблюдаться асимметрия нарастания и убывания импульса. Асимметрия объясняется изменением степени перекрытия нарушителем ЗО при его удалении от СО либо приближении к СО внутри ЗО [4, 6]. Данная асимметрия будет тем больше, чем больше участок проходимый нарушителем внутри 30 и соответственно меньше угол между траекторией движения нарушителя внутри ЗО СО и ее осью. Так, с учетом предложенной схемы развертывания представляется возможным различать сигналы, формируемые пироприемником при пересечении нарушителем ближнего и дальнего участков.
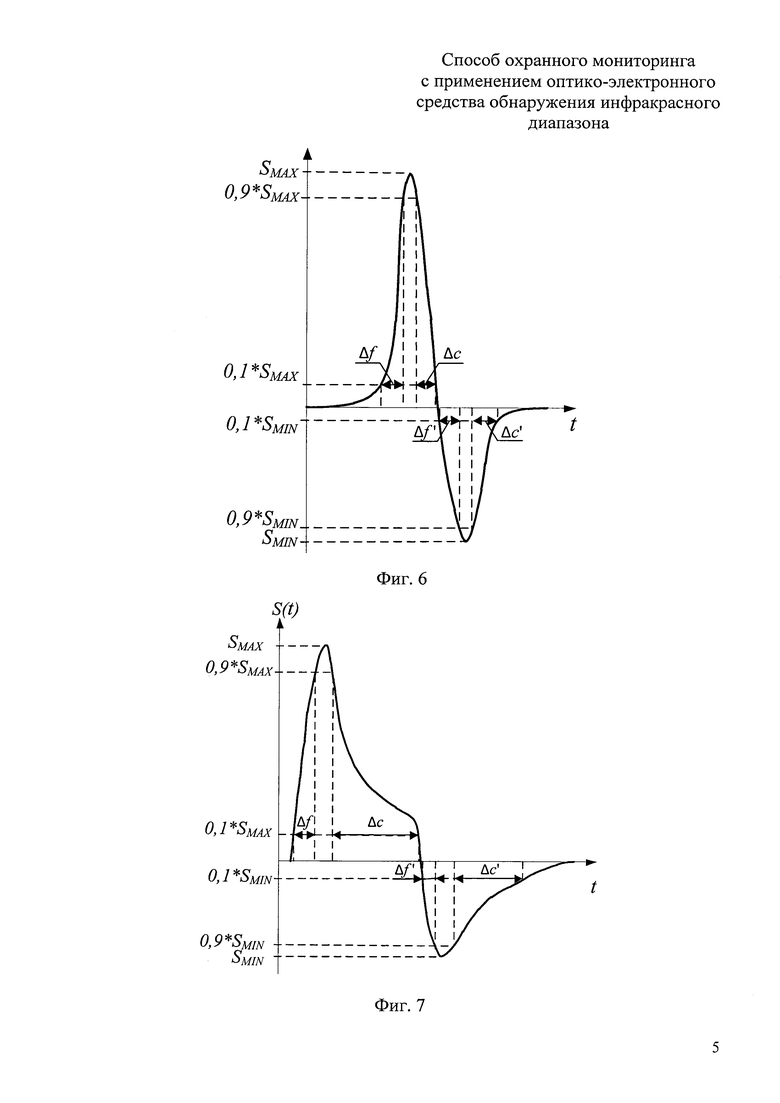
При движении нарушителя по дороге и пересечении им ближнего участка 30 асимметрия импульса полезного сигнала будет слабо выражена, так как нарушитель проходит короткий участок расположенный к оси ЗО СО под углом близким к прямому углу (фиг. 6). При этом длительности фронта и спада импульса полезного сигнала не будут отличаться (асимметричны) более чем в два раза (фиг. 6):

где Δƒ - длительность фронта положительного импульса полезного сигнала, мс;
Δс - длительность спада положительного импульса полезного сигнала, мс.
При движении нарушителя по дороге и пересечении им дальнего участка ЗО асимметрия импульса полезного сигнала будет четко выраженной, так как благодаря предложенной схеме нарушитель проходит протяженный участок расположенный под углом к оси ЗО СО много меньшим прямого угла (фиг. 7). При длине дальнего участка от 10 метров, длительности фронта и спада импульса полезного сигнала будут отличаться более чем в четыре раза (фиг. 7): 
С учетом помех, погрешности измерения, степени перекрытия ЗО нарушителем и чувствительности пироприемника выше указанное условие обеспечивает надежную регистрацию асимметрии полезного сигнала СО.
Асимметрия импульса полезного сигнала оценивается коэффициентом асимметрии (K), который рассчитывается как отношение длительностей фронта Δƒ (Δƒ') и спада Δс (Δс') положительного (отрицательного) импульса, сформированного пироприемником при движении нарушителя в ЗО [4] (фиг. 6, 7). Длительности фронта и спада определяются соответственно как время нарастания импульса полезного сигнала S(t) от 0,1 до 0,9 максимального (минимального) значения SMAX (SMIN) и время убывания импульса полезного сигнала от 0,9 до 0,1 максимального (минимального) значения SMAX (SMIN) (фиг. 6, 7).
Коэффициент асимметрии импульса полезного сигнала определяется как отношение большей длительности фронта или спада положительного импульса к меньшей:

где K - коэффициент асимметрии.
Для повышения достоверности вывода коэффициент асимметрии определяется и для отрицательного импульса:

где Δƒ' - длительность фронта отрицательного импульса полезного сигнала, мс;
Δс' - длительность спада отрицательного импульса полезного сигнала, мс.
Т. е., технически возможно с высокой достоверностью определить участок пересечения ЗО (ближний, дальний) по значению коэффициента асимметрии импульса полезного сигнала при развертывании СО по предложенной схеме (фиг. 7):
- значение коэффициента асимметрии импульса полезного сигнала в течении тревоги не более двух - нарушитель пересек ближний участок:

- значение коэффициента асимметрии импульса полезного сигнала в течении тревоги более четырех - нарушитель пересек дальний участок:

Сигналы тревоги, информация об участке пересечения нарушителем ЗО СО (ближний, дальний) и стороне движения нарушителя относительно оси ЗО СО (из первого сектора во второй или из второго сектора в первый) передаются ССОИ.
ССОИ обеспечивает регистрацию сигналов тревоги, информации об участке пересечения нарушителем ЗО СО и стороне движения нарушителя относительно оси ЗО СО по которой определяет направление движения нарушителя с учетом схемы развертывания СО (фиг. 3, 9):
- если поступил один сигнал тревоги, СО зафиксировало пересечение ближнего участка из первого сектора во второй - нарушитель двигался в направлении СА;
- если поступил один сигнал тревоги, СО зафиксировало пересечение ближнего участка из второго сектора в первый - нарушитель двигался в направлении АС;
- если поступил один сигнал тревоги, СО зафиксировало пересечение дальнего участка из первого сектора во второй - нарушитель двигался в направлении СВ;
- если поступил один сигнал тревоги, СО зафиксировало пересечение дальнего участка из второго сектора в первый - нарушитель двигался в направлении ВС;
- если поступило два сигнала тревоги: при первой тревоге СО зафиксировало пересечение ближнего участка из второго сектора в первый, при второй тревоге СО зафиксировало пересечение дальнего участка из первого сектора во второй - нарушитель двигался в направлении АВ;
- если поступило два сигнала тревоги: при первой тревоге СО зафиксировало пересечение дальнего участка из второго сектора в первый, при второй тревоге СО зафиксировало пересечение ближнего участка из первого сектора во второй - нарушитель двигался в направлении ВА.
Для исключения ошибок вывода, устанавливается максимальное значение времени накопления сигналов тревог (Т), которое определяется максимальным расстоянием между двумя участками пересечения ЗО с дорогами (D), минимальной скоростью движения человека и берется с запасом 1, 2 (фиг. 10):

где Т - максимальное значение времени накопления сигналов тревог, с;
D - максимальное расстояние между двумя участками пересечения ЗО с дорогами, м;
VMIN - минимальная скорость движения нарушителя по дороге, м/с.
Минимальная скорость движения нарушителя берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 10). [3, 7]
Способ охранного мониторинга с применением оптико-электронного средства обнаружения инфракрасного диапазона включает два этапа: подготовительный и основной.
Подготовительный этап:
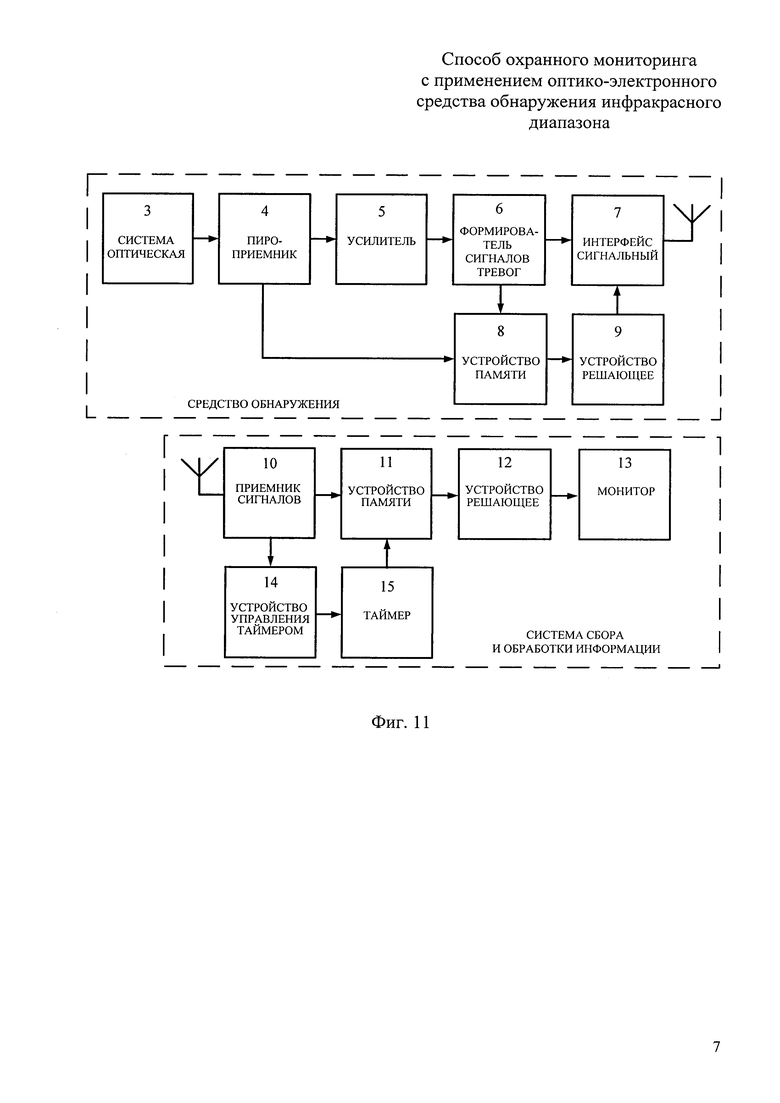
1. Развертывание в месте пересечения трех дорог по установленной схеме СО, включающего в себя: систему 3 оптическую, пироприемник 4, усилитель 5, формирователь 6 сигналов тревог, интерфейс 7 сигнальный, устройство 8 памяти, устройство 9 решающее (фиг. 3, 11).
2. Развертывание на местности ССОИ, включающей в себя: приемник 10 сигналов, устройство 11 памяти, устройство 12 решающее, монитор 13, устройство 14 управления таймером, таймер 15 (фиг. 11).
3. Расчет максимального значения времени накопления сигналов тревог (Т) и загрузка его в устройство 14 управления таймером (формула 8).
4. Запись в устройство 9 решающее алгоритма определения участка пересечения ЗО и стороны движения нарушителя относительно ее оси (фиг. 11).
5. Начало работы СО в дежурном режиме.
Основной этап начинается при движении нарушителя через место пересечения трех дорог и попадании его в ЗО СО, он включает:
1. Формирование полезного сигнала пироприемником 4, усиление сигнала усилителем 5 и поступление сигнала на вход формирователя 6 сигналов тревог (фиг. 11).
2. Формирование сигнала тревоги формирователем 6 сигналов тревог и передача его через интерфейс 7 сигнальный приемнику 10 сигналов (фиг. 11).
3. Регистрацию приемником 10 первого сигнала тревоги, запуск таймера 15 устройством 14 управления таймером, начало отсчета им времени накопления сигналов тревог (Δt) и информации от СО в устройстве 11 памяти (фиг. 8, 11).
4. Определение устройством 9 решающим участка пересечения нарушителем ЗО СО и стороны движения относительно оси ЗО СО, передача этой информации через интерфейс 7 сигнальный приемнику 10 сигналов (фиг. 8, 11).
5. Прием приемником 10 сигналов информации от интерфейса 7 сигнального и запись ее в устройстве 11 памяти до поступления второго сигнала тревоги и сопутствующей информации от СО, либо достижении времени накопления поступающих сигналов тревог (Δt) расчетного времени (7), сохраненного в устройстве 14 управления таймером.
6. Формирование второго сигнала тревоги формирователем 6 сигналов тревог, в случае если нарушитель пересекает ЗО СО второй раз и передача его через интерфейс 7 сигнальный приемнику 10 сигналов (фиг. 11).
7. Повторное определение устройством 9 решающим участка пересечения нарушителем ЗО СО и стороны движения относительно оси ЗО СО, передача этой информации через интерфейс 7 сигнальный приемнику 10 сигналов.
8. Прием приемником 10 сигналов информации от интерфейса 7 сигнального и запись ее в устройстве 11 памяти (фиг. 11).
9. Определение алгоритмом, записанным в устройство 12 решающее, направления движения нарушителя с учетом информации записанной в устройстве 11 памяти и схемы развертывания СО (фиг. 9, 11).
10. Обнуление устройства 6 памяти и таймера 15 (фиг. 11).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания одного пассивного оптико-электронного средства обнаружения в известном способе охранного мониторинга;
- фиг. 2 - схема развертывания двух пассивных оптико-электронных средств обнаружения в известном способе охранного мониторинга;
- фиг. 3 - схема развертывания пассивного оптико-электронного средства обнаружения в предлагаемом способе охранного мониторинга с указанием размеров;
- фиг. 4 - схема зоны обнаружения пассивного оптико-электронного средства обнаружения с указанием размеров (вид сверху);
- фиг. 5 - форма идеально симметричного полезного сигнала поступающего с пироприемника при пересечении нарушителем зоны обнаружения средства обнаружения из первого сектора во второй;
- фиг. 6 - форма асимметричного полезного сигнала поступающего с пироприемника при пересечении нарушителем ближнего участка из первого сектора во второй;
- фиг. 7 - форма асимметричного полезного сигнала поступающего с пироприемника при пересечении нарушителем дальнего участка из первого сектора во второй;
- фиг. 8 - алгоритм вывода СО об участке пересечения (таблица принятия решения СО);
- фиг. 9 - алгоритм вывода ССОИ о направлении движения нарушителя (таблица принятия решения ССОИ);
- фиг. 10 - таблица интервалов скоростей нарушителя в зависимости от условий местности;
- фиг. 11 - структурная схема взаимосвязи применяемых устройств при реализации способа охранного мониторинга.
Технический результат заключается в получении возможности раздельного определения всех шести направлений движения нарушителя через место пересечения трех дорог с применением одного СО.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Пассивный инфракрасный извещатель «STA-473/M2». Инструкция пользователя. - 11 с.
3. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
4. Духан, Е.И. Методология научного исследования средств обнаружения: монография /Е.И. Духан - Екатеринбург: Институт ФСБ России, 2017.-370 с.
5. Маршалов, Т.А. Технические средства охраны границы: учебник/ Т.
А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009.-568 с.
6. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. 367 с.
7. Баленко, С.В. Школа выживания. - М.: 1994. - 140 с.
Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения для сигнализационного контроля места пересечения трех дорог. Технический результат заключается в получении возможности раздельного определения всех шести направлений движения нарушителя через место пересечения трех дорог с применением одного средства обнаружения. Способ заключается в контроле места пересечения трех дорог одним (СО) с двухлучевой зоной обнаружения; определении пересечения нарушителем ближнего участка по коэффициенту асимметрии нарастания и убывания импульсов полезного сигнала не более двух, пересечения нарушителем дальнего участка по коэффициенту асимметрии нарастания и убывания импульсов полезного сигнала более четырех, стороны движения нарушителя относительно оси по последовательности поступления разнополярных импульсов полезного сигнала с пироприемника; установлении максимального значения времени ожидания сигнала тревоги исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения с дорогой. 11 ил.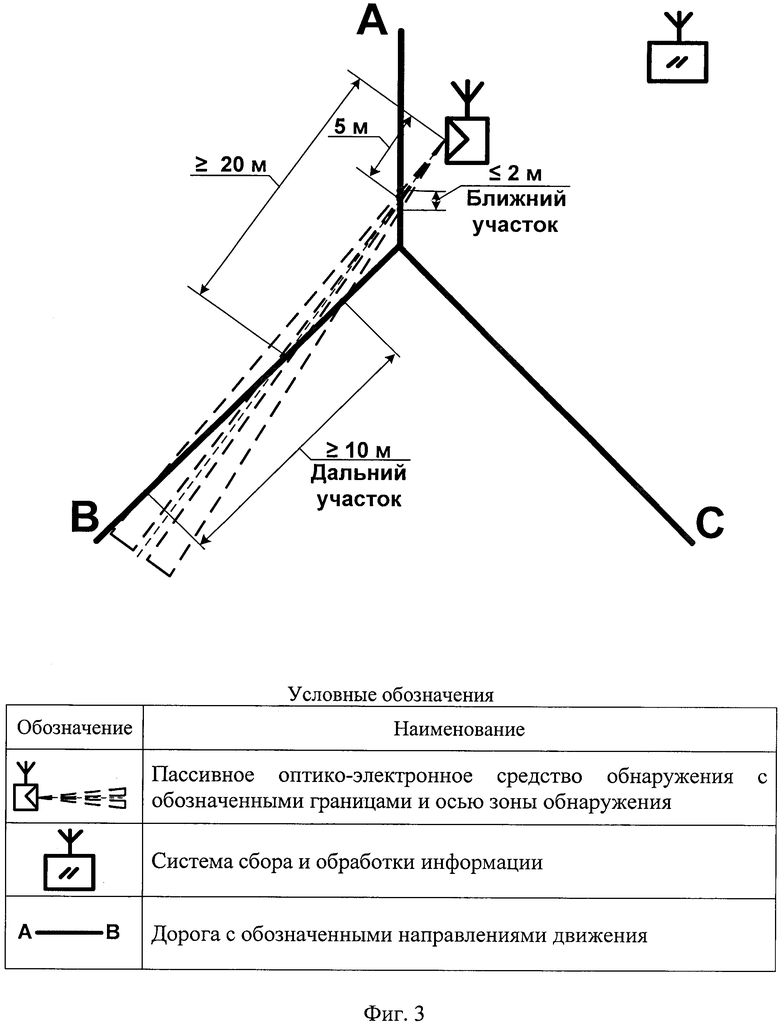
Способ охранного мониторинга с применением оптико-электронного средства обнаружения инфракрасного диапазона, заключающийся в контроле места пересечения трех дорог одним пассивным оптико-электронным средством обнаружения с двухлучевой зоной обнаружения; переходе средства обнаружения один или два раза в режим тревоги в зависимости от направления движения нарушителя через место пересечения трех дорог; определении средством обнаружения стороны движения нарушителя относительно оси зоны обнаружения по последовательности поступления разнополярных импульсов полезного сигнала с пироприемника; в обеспечении регистрации системой сбора и обработки информации сигналов тревоги и информации о стороне движения нарушителя относительно оси зоны обнаружения средства обнаружения, отличающийся тем, что средство обнаружения разворачивается по схеме, в которой ближний участок его зоны обнаружения до 5 метров от средства обнаружения пересекает одну дорогу, дальний участок зоны обнаружения от 20 метров от средства обнаружения и более пересекает другую дорогу; дальний участок зоны обнаружения пересекает не менее 10 метров дороги; средство обнаружения определяет участок пересечения по коэффициенту асимметрии нарастания и убывания импульсов полезного сигнала с пироприемника: коэффициент асимметрии не более двух - пересечение ближнего участка, коэффициент асимметрии более четырех - пересечение дальнего участка и передает информацию о пересекаемом участке на систему сбора и обработки информации; система сбора и обработки информации определяет направление движения нарушителя по информации, полученной от средства обнаружения, с учетом его схемы развертывания: четыре направления движения по наличию одного сигнала тревоги, информации о пересечении нарушителем ближнего или дальнего участка и стороны его движения относительно оси зоны обнаружения, другие два направления по двум сигналам тревоги и очередности поступления сигнала о пересечении ближнего и дальнего участков, стороны его движения относительно оси зоны обнаружения; устанавливается максимальное значение времени ожидания системой сбора и обработки информации второго сигнала тревоги исходя из минимально возможной скорости нарушителя и расстояния, проходимого им между участками пересечения зоны обнаружения с дорогой.
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ПАССИВНОГО ОПТИКО-ЭЛЕКТРОННОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2647651C1 |
| US 5559496, 24.09.1996 | |||
| US 6271754, 07.08.2001 | |||
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |

