Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения (СО) для сигнализационного контроля тропы, проходящих через местность с высокой растительностью или с другими условиями, затрудняющими развертывание СО вне дороги.
Как правило, маршрут движения нарушителя на местности проходит по имеющейся сети троп и дорог. Знание силами реагирования направления движения нарушителя имеет большое значение, так как позволяет сузить направление его поиска и тем самым повысить вероятность его обнаружения и задержания [1]. Поэтому сигнализационному прикрытию сети троп и дорог уделяется значительное внимание. Для этой задачи широко применяются пассивные оптико-электронного средства обнаружения с длинной зоны обнаружения (ЗО) до 50 метров.
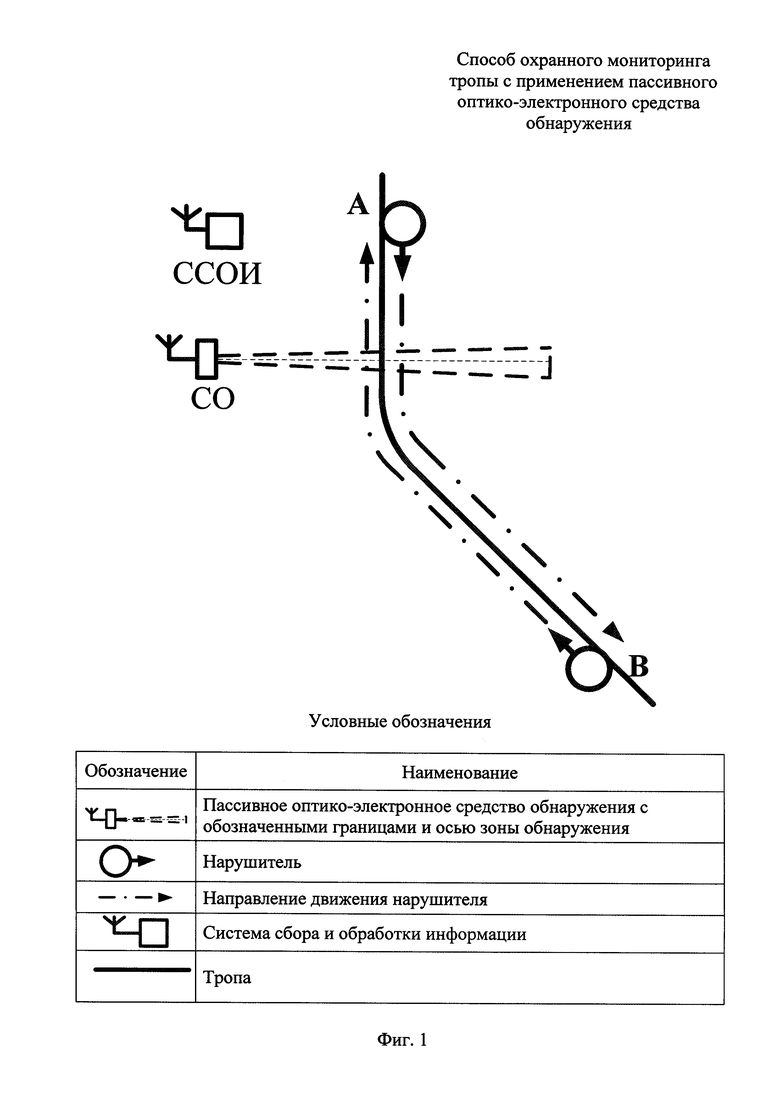
Известен способ охранного мониторинга, заключающийся в контроле тропы одним СО, в обеспечении регистрации системой сбора и обработки информации (ССОИ) сигналов тревог от СО при пересечении нарушителем его ЗО (фиг. 1). [2, 3]
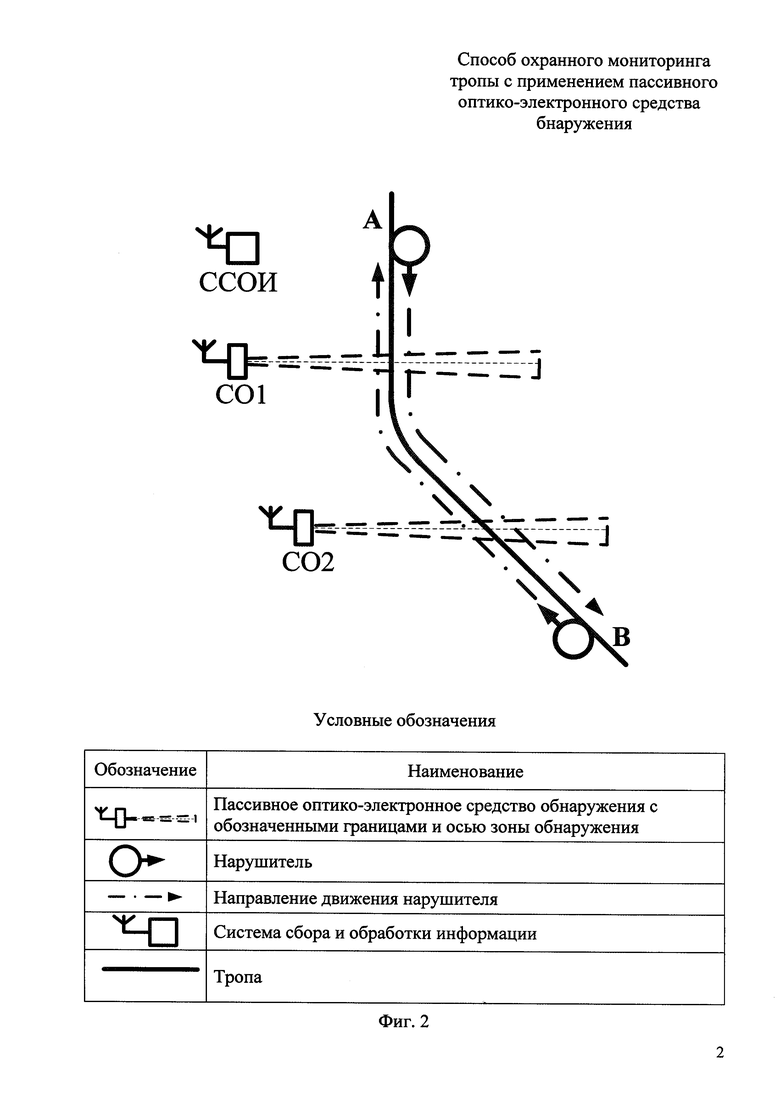
Известен другой способ охранного мониторинга, заключающийся в контроле тропы двумя СО, в обеспечении регистрации ССОИ сигналов тревог от СО при пересечении нарушителем их ЗО, применении алгоритма определения направления движения обнаруженного нарушителя на основе анализа очередности поступления сигналов тревог от СО (фиг. 2). [2, 3]
Недостатком первого указанного способа охранного мониторинга является невозможность определения направления движения обнаруженного нарушителя.
Второй указанный способ охранного мониторинга имеет возможность определения направления движения нарушителя, однако, для его реализации необходимо развертывание двух СО.
Целью изобретения является получение возможности определения направления движения обнаруженного нарушителя с применением только одного СО.
Как правило, тропа, проходящая по участку местности, не является абсолютно прямой, одним из наиболее часто встречаемых ее элементов является изгиб тропы (дугообразный поворот, искривление тропы - состоящие из двух смежных прямых участков тропы соединенных круговой кривой). [4]
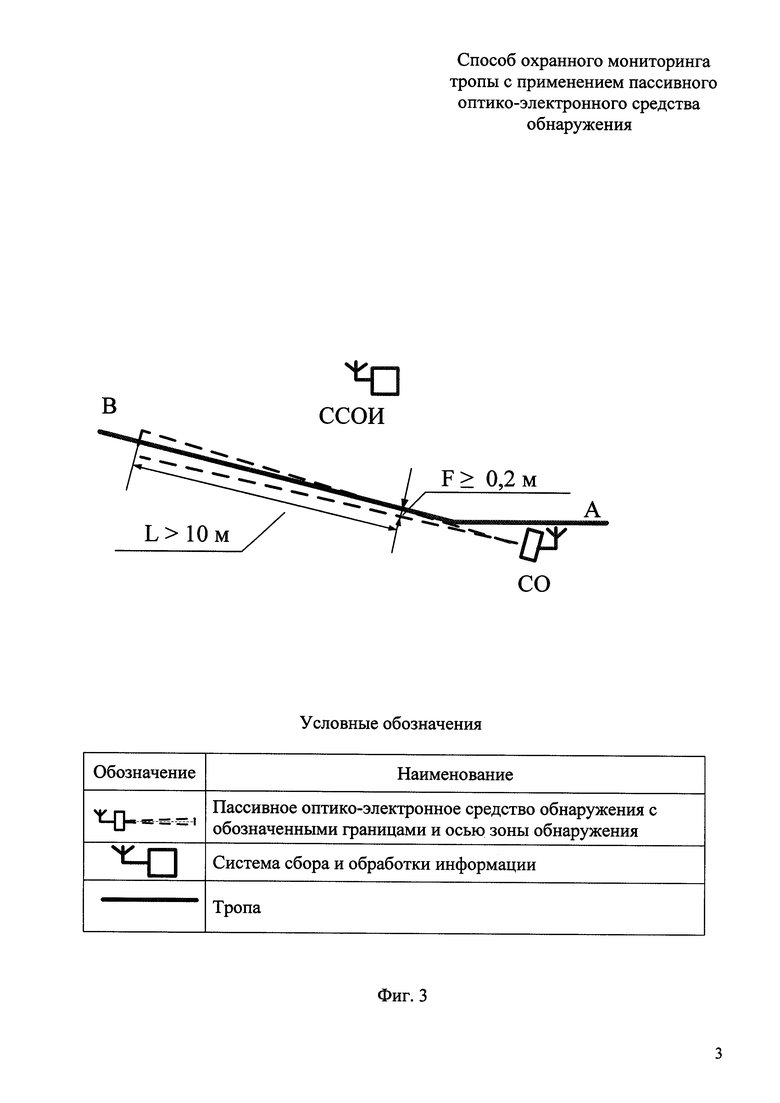
Для достижения поставленной цели разработан способ охранного мониторинга тропы с применением пассивного оптико-электронного средства обнаружения, заключающийся в контроле изгиба тропы одним СО, развернутым таким образом, чтобы оно находилось с внешней стороны угла изгиба тропы на расстоянии до 1-2 метров от него; ориентировании СО так, чтобы участок его зоны обнаружения длинной более 10 метров и шириной не менее 0,2 метра находился над тропой; записи полезного сигнала СО в течение всего времени его нахождения в режиме тревоги; применении алгоритма определения направления движения нарушителя относительно СО по характеру изменения уровня полезного сигнала: уровень полезного сигнала увеличивался - нарушитель двигался в сторону СО; уровень полезного сигнала уменьшался - нарушитель двигался в сторону от СО; СО передается системе сбора и обработки информации сигнал о направлении движения нарушителя (фиг. 3).
Известно, что принцип действия пассивных оптико-электронных средств обнаружения основан на регистрации сигналов, порождаемых тепловым потоком, излучаемым объектом обнаружения (нарушителем). [5]
Полезный сигнал на выходе пироприемника пассивного оптико-электронного средства обнаружения определяется [5]:

где S(t) - уровень полезного сигнала, В;
SU - вольтовая чувствительность пироприемника СО, В;
ΔФ(t) - изменение величины теплового потока, падающего на входное окно оптической системы, вызванное движением нарушителя в зоне обнаружения, Вт/м2.
В свою очередь, максимальное значение теплового потока от нарушителя определяется:

где ΔФ - максимальное значение теплового потока от нарушителя, Вт/м2;
Н - расстояние от СО до нарушителя, м;
SBX - площадь входного окна оптической системы СО, м2;
SH - площадь проекции нарушителя на плоскость, перпендикулярную направлению наблюдения СО, м2;
LH - яркость нарушителя, кд/м2;
LФ - яркость фона, кд/м2.
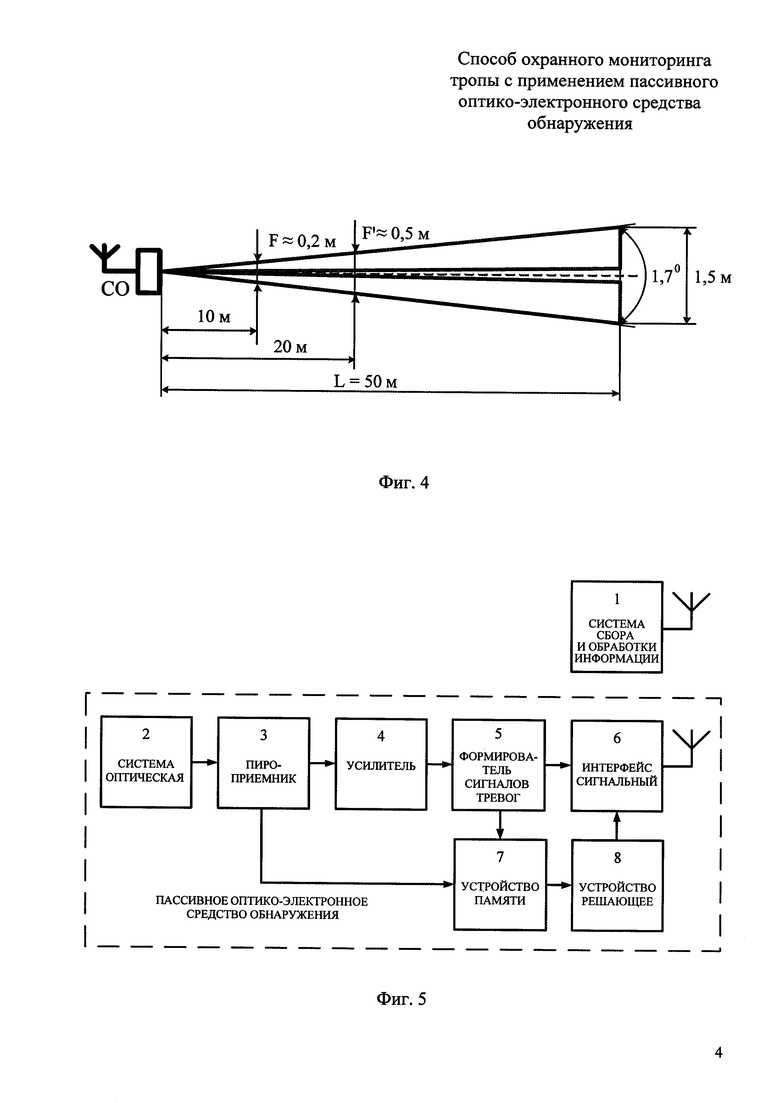
То есть, сигнал на выходе пироприемника СО при прочих равных условиях тем больше, чем больше степень перекрытия нарушителем ЗО и чем меньше расстояние до самого СО [5]. Форма ЗО СО - конусообразная, ширина ее в нескольких метрах от СО (F) - десятые доли метра ближе к концу зоны (F') - более метра (фиг. 4). С учетом того, что ширина тела человека (нарушителя) от 0,3 м, а также формул 2 и 3 и предлагаемой схемы развертывания СО на изгибе тропы уровень полезного сигнала при движении нарушителя через ЗО вдоль ее оси не будет постоянным. Уровень полезного сигнала будет увеличиваться при приближении к СО и наоборот - при движении нарушителя от СО уровень полезного сигнала будет уменьшаться. На участке ЗО длиной от 10 метров эта зависимость надежно регистрируется СО.
С учетом предлагаемой схемы развертывания СО по характеру изменения уровня полезного сигнала можно сделать вывод о направлении движения нарушителя:
- если уровень полезного сигнала увеличивался в течение длительности режима тревоги - нарушитель двигался в сторону средства обнаружения (направление ВА) (фиг. 3):

где SMIN - минимальный уровень полезного сигнала, регистрируемый СО в течение всей длительности режим тревоги, В;
SMAX - максимальный уровень полезного сигнала, регистрируемый СО в течение всей длительности режим тревоги, В.
- если уровень полезного сигнала уменьшался в течение длительности сигнала тревоги - нарушитель двигался в сторону от средства обнаружения (направление АВ) (фиг. 3):

Информация о направлении движения нарушителя (нарушитель движется в сторону СО или нарушитель движется в сторону от СО) передается СО системе сбора и обработки информации по радиоканалу.
Способ охранного мониторинга тропы включает два этапа: подготовительный и основной. Подготовительный этап:
1. Развертывание на местности системы 1 сбора и обработки информации (фиг. 6).
2. Развертывание на изгибе тропы по установленной схеме пассивного оптико-электронного средства обнаружения, включающего в себя: систему 2 оптическую, пироприемник 3, усилитель 4, формирователь 5 сигналов тревог, интерфейс 6 сигнальный, устройство 7 памяти, устройство 8 решающее (фиг. 3, 5).
Основной этап начинается при движении нарушителя через изгиб тропы и попадании его в ЗО СО, он включает:
1. Фокусировку электромагнитного излучение инфракрасного диапазона от нарушителя с помощью системы 2 оптической на пироприемник 3. Формирование сигнала пироприемником 3, усиление сигнала усилителем 4 и поступление сигнала на вход формирователя 5 сигналов тревог.
2. Начало формирования сигнала тревоги формирователем 5 сигналов тревог (фиг. 5).
3. Передачу через интерфейс 6 сигнальный системе 1 сбора и обработки информации сигнала тревоги (фиг. 5).
4. Передачу команды управления формирователем 5 сигнала тревог устройству 7 памяти на начало запоминание уровня полезного сигнала поступающего с пироприемника 3 (фиг. 5).
5. Начало запоминания уровня полезного сигнала устройством 7 памяти (фиг. 6).
6. Выход нарушителя из ЗО СО. Прекращение формирование сигнала тревоги формирователем 5 сигналов тревог (фиг. 5).
7. Окончание формирования сигнала тревоги формирователем 5 сигналов тревог (фиг. 5).
8. Передачу команды управления формирователем 5 сигнала тревог устройству 7 памяти на окончание запоминания уровня сигнала поступающего с пироприемника 3 (фиг. 5).
9. Определение характера изменения уровня полезного сигнала устройством 8, решающим: уровень полезного сигнала увеличивался или уровень полезного сигнала уменьшался (фиг. 5).
10. Определение устройством 8, решающим направление движения нарушителя:
- если уровень полезного сигнала увеличивался в течение длительности режима тревоги - нарушитель двигался в сторону средства обнаружения (фиг. 3), (формула 3);
- если уровень полезного сигнала уменьшался в течение длительности сигнала тревоги - нарушитель двигался в сторону от средства обнаружения (фиг. 3), (формула 4).
11. Передача пассивным оптико-электронным средством обнаружения системе 1 сбора и обработки информации о направлении движения нарушителя через интерфейс 6 сигнальный по радиоканалу (фиг. 5).
12. Обнуление памяти устройства памяти 7 (фиг. 5).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания одного пассивного оптико-электронного средства обнаружения в известном способе охранного мониторинга;
- фиг. 2 - схема развертывания двух пассивных оптико-электронных средств обнаружения в известном способе охранного мониторинга;
- фиг. 3 - схема развертывания пассивного оптико-электронного средства обнаружения в предлагаемом способе охранного мониторинга с указанием размеров;
- фиг. 4 - схема зоны обнаружения пассивного оптико-электронного средства обнаружения с указанием размеров (вид сверху);
- фиг. 5 - структурная схема взаимосвязи применяемых устройств при реализации способа охранного мониторинга.
Технический результат заключается в получении возможности определения направления движения обнаруженного нарушителя с применением только одного СО.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов, Т.А. Технические средства охраны границы: учебник/ Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
5. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
6. Баленко, С.В. Школа выживания. - М.: 1994. - 140 с.
Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения (СО) для сигнализационного контроля тропы, проходящих через местность с высокой растительностью или с другими условиями, затрудняющими развертывание СО вне тропы. Способ заключается в контроле изгиба тропы одним СО, развернутым таким образом, чтобы оно находилось с внешней стороны угла изгиба тропы на расстоянии до 1-2 метров от него; ориентировании СО так, чтобы участок его зоны обнаружения длинной более 10 метров и шириной не менее 0,2 метра находился над тропой; записи полезного сигнала СО в течение всего времени его нахождения в режиме тревоги; применении алгоритма определения направления движения нарушителя относительно СО по характеру изменения уровня полезного сигнала: уровень полезного сигнала увеличивался - нарушитель двигался в сторону СО; уровень полезного сигнала уменьшался - нарушитель двигался в сторону от СО; СО передается системе сбора и обработки информации сигнал о направлении движения нарушителя. Способ включает подготовительный этап с развертыванием по разработанной схеме СО на изгибе тропы и основной этап, который начинается обнаружением нарушителя и заканчивается формированием вывода о направлении движения нарушителя через изгиб тропы. Технический результат заключается в получении возможности определения направления движения обнаруженного нарушителя с применением только одного СО. 5 ил.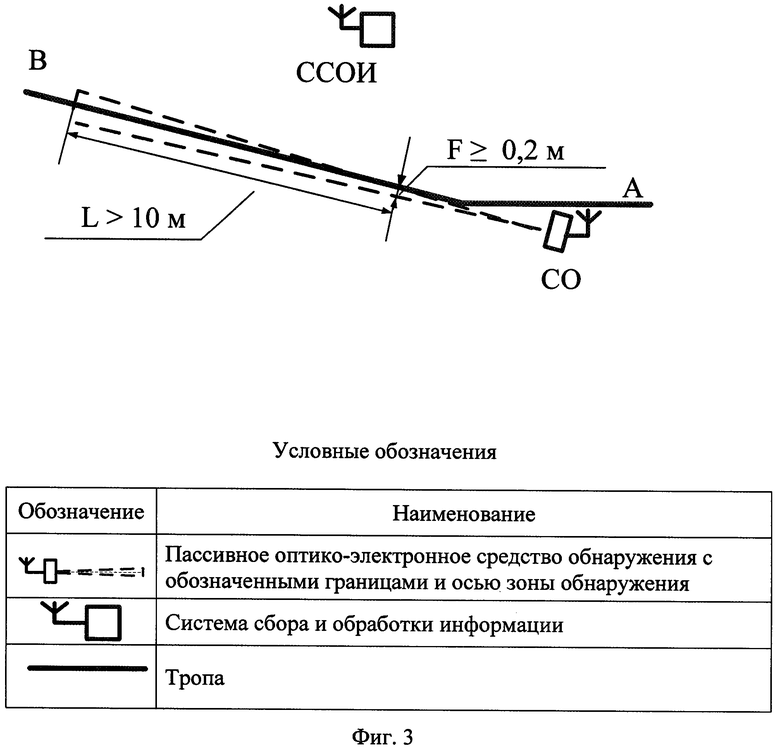
Способ охранного мониторинга тропы с применением пассивного оптико-электронного средства обнаружения, заключающийся в контроле изгиба тропы одним пассивным оптико-электронным средством обнаружения; в обеспечении регистрации системой сбора и обработки информации сигналов от средства обнаружения, отличающийся тем, что средство обнаружения устанавливается с внешней стороны угла изгиба тропы на расстоянии до 1-2 метров от него; средство обнаружения ориентируется так, чтобы участок его зоны обнаружения длинной более 10 метров и шириной не менее 0,2 метра находился над тропой; полезный сигнал записывается средством обнаружения в течение всего времени его нахождения в режиме тревоги; применяется алгоритм определения направления движения нарушителя относительно средства обнаружения по характеру изменения уровня полезного сигнала: уровень полезного сигнала увеличивался - нарушитель двигался в сторону средства обнаружения; уровень полезного сигнала уменьшался - нарушитель двигался в сторону от средства обнаружения; средством обнаружения передается системе сбора и обработки информации сигнал о направлении движения нарушителя.
| Аппарат для исследования словесной, дыхательной и двигательной реакций и телеуправления с помощью слова или выдоха | 1959 |
|
SU129283A1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2446479C1 |
| WO 2013056244 A1 18.04.2013 | |||
| US 20080094212 A1 24.04.2008. | |||

