Изобретение относится к области радионавигации, а именно к формирователям навигационных радиосигналов спутниковых навигационных систем, и может быть использовано при создании навигационной аппаратуры системы ГЛОНАСС, предназначенной для излучения через единую антенну навигационных сигналов с частотным и кодовым разделением.
В качестве ближайшего аналога предлагаемого изобретения может быть выбран способ формирования сигнала в имитаторе навигационных радиосигналов из патента на полезную модель RU 122976, публикация 2013 г., ИСС им. Акад. М.Ф. Решетнева. В блоке цифрового формирования навигационного сигнала данного имитатора формируют несколько трактов модулированного сигнала, объединяемых в дальнейшем в сумматоре в единый навигационный сигнал. В каждом тракте по входящей информации цифровой синтезатор с аналоговым выходом формирует сигнал, поступающий через смеситель в модулятор псевдослучайной последовательности. Как и было указано выше, способ формирования сигнала из патента RU 122976 предназначен для использования в имитаторе навигационных сигналов, то есть в устройстве, моделирующем работу спутниковой навигационной системы в целом, но не ее отдельных элементов. То есть использование данного способа для формирования навигационного сигнала в реальной спутниковой навигационной системе может быть затруднено, в частности, из-за того, что использование отдельных трактов для передачи сигналов усложняет бортовую аппаратуру и снижает ее эксплуатационную надежность. В свою очередь, в предлагаемом изобретении становится возможным преодолеть данные недостатки, расширив область применения способов цифрового формирования навигационного сигнала, и повысить качество навигационного сигнала в целом.
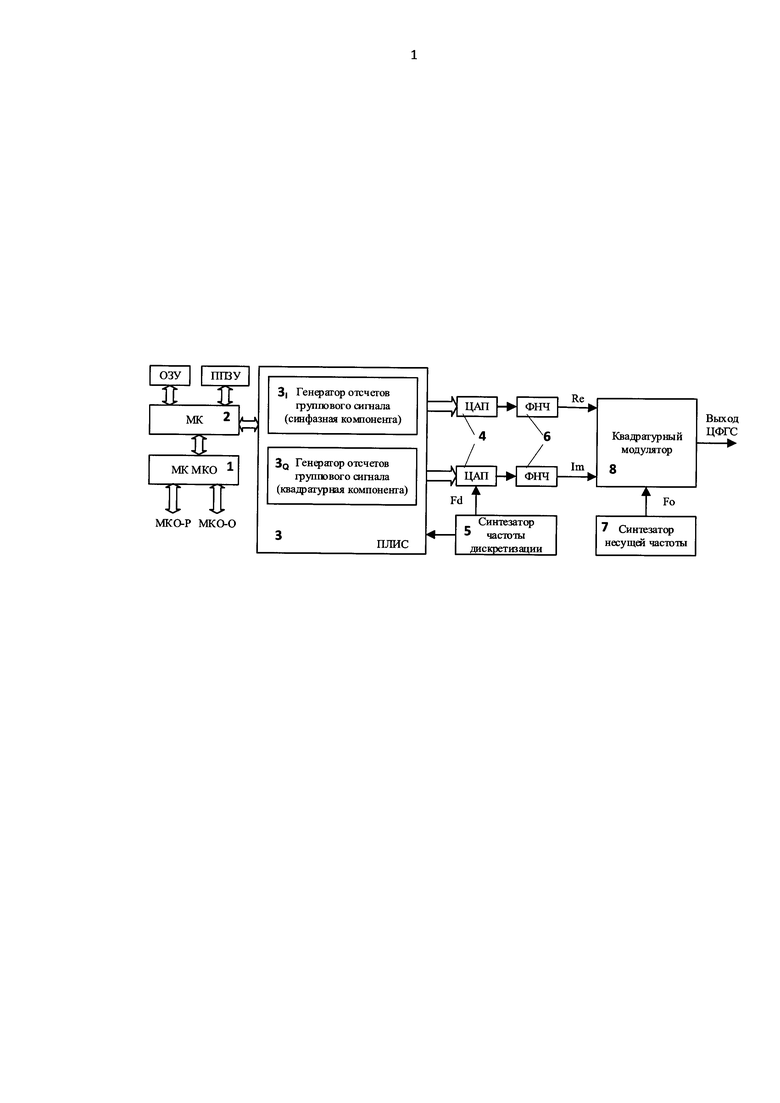
Предложен способ формирования сигнала спутниковой навигационной системы в квадратурном модуляторе из синфазной и квадратурной составляющих, полученных путем цифрового синтеза частоты по управляющим сигналам. То есть предложен способ формирования сигнала, объединяющего в себе функции прецизионного синхросигнала и информационного сигнала. В отличие от аналога, синфазную и квадратурную составляющие (компоненты) навигационного сигнала генерируют путем цифрового синтеза частоты в программируемой логической интегральной схеме (ПЛИС) из сигналов стандартной и/или высокой точности с частотным и/или кодовым разделением по управляющим сигналам от микроконтроллера мультиплексного канала обмена и микроконтроллера управления и обработки информации. Структурная схема цифрового формирователя сигнала приведена на чертеже.
Управляющие сигналы и информация из микроконтроллера мультиплексного канала обмена 1 и микроконтроллера управления и обработки информации 2 поступают в ПЛИС 3, где методом цифрового синтеза частоты генерируются отсчеты синфазной 3I и квадратурной 3Q составляющих (компонент) группового навигационного сигнала. Использование цифрового синтеза частоты позволяет создать из опорной частоты требуемую частоту или набор частот, согласно управляющим сигналам и программной логике выбора цифровых отсчетов. Использование ПЛИС 3, по сравнению с использованием микросхем с жесткой логикой, позволяет производить оперативную и гибкую отладку алгоритмов работы и удаленно корректировать работу всей схемы формирования сигнала. Также ПЛИС 3 обеспечивает дополнительное цифровое выравнивание амплитуды группового сигнала, а также его дополнительную цифровую фильтрацию, благодаря чему становится возможным использовать усилители в энергетически выгодном режиме насыщения.
Для спутниковой навигационной системы ГЛОНАСС могут быть предложены следующие формулы цифрового синтеза: для синфазной -  и соответственно квадратурной -
и соответственно квадратурной -  составляющих, где
составляющих, где  - сигнал стандартной точности с кодовым разделением,
- сигнал стандартной точности с кодовым разделением,  - сигнал стандартной точности с частотным разделением,
- сигнал стандартной точности с частотным разделением,  - сигнал высокой точности с кодовым разделением,
- сигнал высокой точности с кодовым разделением,  - сигнал высокой точности с частотным разделением, dƒ - разность несущих частот сигналов с частотным и кодовым разделением, Гц, ƒcd - несущая частота сигнала с кодовым разделением, Гц. Согласно интерфейсному контрольному документу системы ГЛОНАСС сигнал стандартной точности предназначен для свободного использования отечественными и зарубежными гражданскими потребителями, в свою очередь, сигнал высокой точности используют по согласованию с уполномоченным государственным органом. По аналогии, термины сигналы стандартной и высокой точности возможно будет использовать при анализе работы и проектировании оборудования иных спутниковых навигационных систем.
- сигнал высокой точности с частотным разделением, dƒ - разность несущих частот сигналов с частотным и кодовым разделением, Гц, ƒcd - несущая частота сигнала с кодовым разделением, Гц. Согласно интерфейсному контрольному документу системы ГЛОНАСС сигнал стандартной точности предназначен для свободного использования отечественными и зарубежными гражданскими потребителями, в свою очередь, сигнал высокой точности используют по согласованию с уполномоченным государственным органом. По аналогии, термины сигналы стандартной и высокой точности возможно будет использовать при анализе работы и проектировании оборудования иных спутниковых навигационных систем.
Цифровые отсчеты синфазной и квадратурной составляющих (компонент) группового навигационного сигнала по единому тракту передачи сигнала поступают в цифроаналоговые преобразователи 4I,Q, формирующие аналоговые сигналы, задаваемые синтезатором частоты дискретизации системы 5. Необходимость формирования единого тракта передачи сигнала обусловлена тем, что генерируемый навигационный сигнал, кроме передачи информации, используется также для проведения навигационных измерений, то есть объединяет в себе функции прецизионного синхросигнала и информационного сигнала. Полученные аналоговые компоненты группового навигационного сигнала, также по единому тракту передачи сигнала, пропускаются через фильтры нижних частот 6I,Q и поступают в квадратурный модулятор 8, в котором происходит модуляция несущего радиосигнала, задаваемого синтезатором несущей частоты 7.
Предложенную обработку исходных сигналов и информации используют для формирования навигационного сигнала с одновременным частотным и кодовым разделением каналов передачи информации, характерного для спутниковой навигационной системы ГЛОНАСС. Использование цифрового синтеза частоты на базе ПЛИС 3 для исходных сигналов с частотным и кодовым разделением каналов позволит решить проблему совмещения частотного и кодового разделения каналов в одном сигнале без использования излишне сложных схемотехнических и алгоритмических решений. Цифровой синтез сигнала в ПЛИС 3 обеспечивает передачу сигналов с частотным и кодовым разделением на разных несущих частотах в едином тракте. В свою очередь, наличие единого тракта позволит устранить расхождение параметров между несколькими трактами - параметров задержки, компенсировать возможные задержки от старения - изменения параметров тракта во время эксплуатации, температурного влияния на изменение задержек, что в сумме дает большой диапазон задержек. Также при предложенном цифровом синтезе сигнала станет возможна полная компенсация ошибки формирования навигационного сигнала на этапе автономных и комплексных испытаний элементов спутниковой навигационной системы за счет дополнительной цифровой регулировки и становится возможным удаленное выполнение независимой юстировки каналов формирования навигационного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС | 2018 |
|
RU2686660C1 |
| ИМИТАТОР НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2697811C2 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2280260C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АППАРАТНОЙ ЗАДЕРЖКИ ВЫХОДНОГО СИГНАЛА ПЕРЕДАТЧИКА | 2015 |
|
RU2581767C1 |
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| ЦИФРОВОЙ ИМИТАТОР СИГНАЛОВ N-ЭЛЕМЕНТНОЙ АНТЕННОЙ РЕШЕТКИ ГНСС | 2023 |
|
RU2800773C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2159448C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
Изобретение относится к области радионавигации. Технический результат заключается в расширении арсенала средств для формирования сигналов спутниковой навигационной системы. Указанный сигнал спутниковой навигационной системы формируют в квадратурном модуляторе из синфазной и квадратурной составляющих сигнала. Синфазную и квадратурную составляющие формируют по управляющим сигналам от микроконтроллера мультиплексного канала обмена и микроконтроллера управления и обработки информации в программируемой логической интегральной схеме путем цифрового синтеза частоты из сигналов стандартной и высокой точности с частотным и кодовым разделением.1 ил.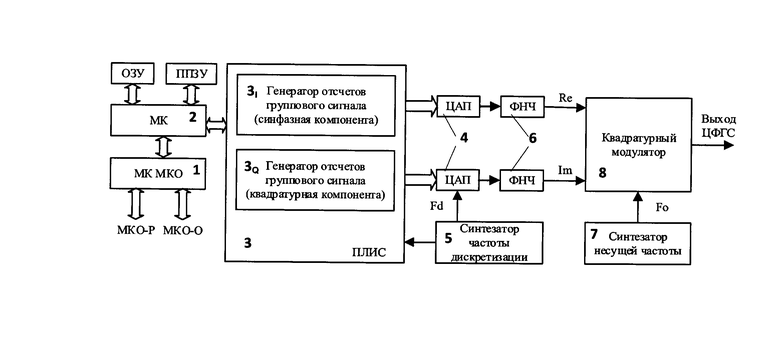
1. Способ формирования сигнала спутниковой навигационной системы в квадратурном модуляторе из синфазной и квадратурной составляющих, полученных путем цифрового синтеза частоты по управляющим сигналам, отличающийся тем, что
синфазную и квадратурную составляющие навигационного сигнала генерируют по управляющим сигналам от микроконтроллера мультиплексного канала обмена и микроконтроллера управления и обработки информации в
программируемой логической интегральной схеме из сигналов стандартной и высокой точности с частотным и кодовым разделением, причем синфазную составляющую формируют как
 а
а
квадратурную составляющую как
 где
где
 - сигнал стандартной точности с кодовым разделением,
- сигнал стандартной точности с кодовым разделением,
 - сигнал стандартной точности с частотным разделением,
- сигнал стандартной точности с частотным разделением,
 - сигнал высокой точности с кодовым разделением,
- сигнал высокой точности с кодовым разделением,
 - сигнал высокой точности с частотным разделением,
- сигнал высокой точности с частотным разделением,
dƒ - разность несущих частот сигналов с частотным и кодовым разделением, Гц,
ƒcd - несущая частота сигнала с кодовым разделением, Гц, и
передают цифровые отсчеты синфазной и квадратурной составляющих навигационного сигнала и полученные затем соответствующие аналоговые компоненты для модуляции несущего радиосигнала по единому тракту передачи сигнала.
| Способ повышения несущей способности армированного ледяного покрова | 1959 |
|
SU123976A1 |
| ПЕРЕДАЧА СИГНАЛОВ С ПЕРЕМЕННОЙ СКОРОСТЬЮ В СИСТЕМЕ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ С ИСПОЛЬЗОВАНИЕМ ГРУППОВОГО КОДИРОВАНИЯ | 1994 |
|
RU2142201C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

