Изобретение относится к области радионавигации и может быть использовано для формирования радиосигналов подобных навигационным от космических аппаратов (КА) глобальных спутниковых радионавигационных систем (СРНС) ГЛОНАСС и GPS с соответствующим вектором состояния (пространственными координатами, составляющими вектора скорости и времени) для проверки навигационных приемников, расположенных на КА, находящихся на геостационарной, высокоэллиптической или произвольной орбитах, а также сигналов систем, функционально дополняющих СРНС.
Известен способ и устройство для проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных, решающий задачу проверки устройств, позволяющих определять местоположение с использованием вспомогательных данных, которые включают использование имитатора объекта определения местоположения, связанного с имитатором базовой станции, и подключение проверяемого устройства, позволяющего определять местоположение с использованием вспомогательных данных, к имитатору базовой станции и к имитатору глобальной системы позиционирования (Патент РФ №2328016).
Недостатком данного устройства является невозможность формировать сигналы высокой точности (ВТ-кода) ГЛОНАСС.
Известен имитатор на основе векторного генератора сигналов R&S SMBV100A с программной опцией СРНС, обеспечивающий моделирование сигнала с профилями движения навигационного приемника, многолучевым распространением навигационного сигнала (НС), динамическим управлением мощностью и моделированием атмосферных явлений, поддержку A-GPS, LTE, HSPA+, GSM/EDGE, HD radio™ и FM стерео, с количеством сценариев реального времени GPS/Galileo до 12 (www.rohde-schwarz.com/ad/smbv-gnss).
Недостатком данного устройства является невозможность формировать сигналы высокой точности (ВТ-кода) ГЛОНАСС.
Известен имитатор ИМ-2 ОАО "МКБ "Компас", который формирует сигналы ГЛОНАСС стандартной точности (СТ-код) и высокой точности (ВТ-код) в частотных диапазонах L1 и L2, а также GPS С/А (L1) со скоростями объекта до 8 км/с, ускорением до 1000 м/с2 и рывком до 500 м/с3 (Аэрокосмическое обозрение №4 2007 г.).
Недостатком данного устройства является невозможность формировать сигналы, подобные реальным навигационным от СРНС ГЛОНАСС и GPS, для космических аппаратов, находящихся на геостационарной или высокоэллиптической орбитах, т.к. они требуют больших динамических характеристик - например, моделируемой скорости до 12 км/с.
Указанный недостаток частично устранен в имитаторах спутниковых навигационных систем компании Spirent серии GSS8000, которые имеют динамические характеристики моделируемой скорости до 120 км/с, ускорением до 4450 м/с2 и рывком до 890000 м/с3 по 3-м частотам с поддержкой GPS (L1, L2 P(Y), L2C, L5, M-noise), SBAS (WAAS, EGNOS, MSAS), GLONASS (L1, L2) и Galileo (E1, E5a/b, E6, OS, CS, SOL).
Недостатком данного устройства является невозможность формировать сигналы высокой точности (ВТ-кода) ГЛОНАСС.
Формирование радиочастотного сигнала эквивалентного полному совмещенному навигационному полю ГЛОНАСС (СТ-кода (L1) и ВТ-кода (L2), а также дальномерного кода в частотном диапазоне L3), GPS, SBAS, Galileo обеспечивает СН-3803 (ТДЦК.464938.006) - имитатор сигналов спутниковых навигационных систем ЗАО «КБ НАВИС», способный имитировать сложные динамические движения наземных навигационных приемников в любом географическом районе Земли с высотами от минус 1 км до плюс 8000 км с динамическими характеристиками моделируемой скорости до 12 км/с, ускорением до 500 м/с2 и рывком до 500 м/с3 (зарегистрирован в Государственном Реестре средств измерений №20278-00 РФ; № сертификата утверждения типа: RU.C.33.018.B №8743 от 27.01.2000 ГЦИ СИ «Воентест»). Габариты 420×500×157 мм, масса 16 кг.
Недостатком данного устройства является невозможность формировать сигналы, подобные реальным навигационным от СРНС ГЛОНАСС и GPS, для космических аппаратов находящихся на геостационарной или высокоэллиптической орбитах.
Известна полезная модель имитатора навигационных и межспутниковых радиосигналов (Патент РФ №117644), включающего в себя блок питания, блок платы персонального компьютера, вход которого является входом устройства, блок перемножения сигнала, выход которого является выходом устройства, единую материнскую плату и, по меньшей мере, один блок навигационного модуля.
Недостатками данного устройства является наличие платы персонального компьютера и единой материнской платы, что усложняет конструкцию и требует специального программно-математического обеспечения, ограничивающего возможности воспроизведения навигационных сигналов произвольной группировки космических аппаратов.
Наиболее близкой к заявляемому изобретению, является полезная модель имитатора навигационных сигналов (Патент РФ №123976), принятого в качестве прототипа. Полезная модель включает в себя формирователь навигационного сигнала, который состоит из блока цифрового формирования сигнала и преобразователя частоты вверх, выход которого последовательно соединен с аттенюатором и антенной излучателя или входом навигационного приемника. Блок цифрового формирования навигационного сигнала имеет на входе узел интерфейса обмена цифровой информацией для непосредственного ввода параметров навигационного сигнала, выходы которого соединены с входами узла формирования сигналов псевдослучайной последовательности (ПСП) и входами узла синтеза модулированных сигналов; при этом выходы узла формирования сигналов ПСП соединены с входами узла синтеза модулированных сигналов, выходы которого связаны с входом узла формирования сигналов ПСП, входом преобразователя частоты вверх и входами сумматора, выходом соединенного с входом фильтра, выход которого связан с входом преобразователя частоты вверх с гетеродинным переносом частоты. В узле синтеза сигналов для генерации сигналов на первой промежуточной частоте с учетом эффекта Доплера используется прямой цифровой синтез на основе накапливающего сумматора, с модуляцией на второй промежуточной частоте.
Недостатком прототипа является сложность реализации узла синтеза модулированных сигналов, а также неравномерное групповое время запаздывания (ГВЗ) формируемого сигнала, вызванное обязательным наличием фильтра на выходе преобразователя частоты вверх, необходимого для подавления зеркального канала возникшего при гетеродинном переносе частоты вверх.
Целью данного изобретения является упрощение реализации узла синтеза модулированных сигналов и улучшение характеристик выходного сигнала устройств формирования радиосигналов, подобных реальным навигационным от спутниковых радионавигационных систем ГЛОНАСС и GPS.
Указанная цель достигается тем, что в блок цифрового формирователя навигационного сигнала, из состава имитатора, содержащий стандартный узел интерфейса обмена цифровой информацией для непосредственного ввода параметров навигационного сигнала, узел формирования сигналов ПСП, узел синтеза сигналов и фильтр, добавлен дополнительный фильтр, а узел синтеза сигналов формирует гетеродинные сигналы FГ cos и FГ sin за счет введенного фазовращателя. Так же за счет введенных фазовращателей и цифровых синтезаторов узел синтеза сигналов формирует синфазные (I) и квадратурные (Q) составляющие для каждого сигнала от навигационных космических аппаратов (НКА), которые отдельно модулируются и суммируются в I- и Q-составляющие всех каналов. Входы узла синтеза сигналов соединены с выходами узла интерфейса обмена цифровой информацией и выходами узла формирования сигналов ПСП, выходы узла синтеза сигналов соединены с входами фильтров. Выходы фильтров являются выходами сумм I- и Q-составляющих и выходом блока цифрового формирования сигнала. Блок цифрового формирования навигационного сигнала имеет стандартный цифровой интерфейс для непосредственного ввода параметров навигационного сигнала с соответствующего устройства управления, а выходами блока цифрового формирования навигационного сигнала являются выходы I- и Q-составляющих требуемого навигационного сигнала заданной группировки НКА на промежуточной частоте (ПЧ) и гетеродинные сигналы FГ cos и FГ sin для квадратурного переноса НС на заданную частоту. Преобразователь частоты вверх реализован на принципе квадратурного преобразования, на входы которого подается синфазная и составляющая квадратурная составляющая НС на ПЧ, а на другие входы подается группа гетеродинных сигналов FГ cos и FГ sin, сформированных в узле синтеза сигналов. Выход преобразователя частоты вверх, является выходом навигационного сигнала заданной группировки НКА на частоте излучения заданной СРНС. Выход аттенюатора является выходом навигационного сигнала заданной группировки НКА на частоте излучения заданной СРНС с требуемым уровнем излучения для антенны излучателя или входа приемника навигационного сигнала.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, помимо упрощения устройства, является улучшение характеристик навигационных радиосигналов для произвольной группировки НКА и произвольных траектории и скорости движения навигационного приемника. Указанные эффекты достигаются за счет структурного построения имитатора, при котором полный цикл синтеза I- и Q-составляющих НС на ПЧ от одного НКА возможно реализовать в единой микросхеме (например, AD9854ASQ). Полученный сигнал, представленный в виде I- и Q-составляющих, переносится в ВЧ-область преобразователем использующий принцип квадратурного преобразования, что позволит отказаться от узкополосных выходных фильтров, тем самым уменьшить неравномерность ГВЗ. Данные обстоятельства отличают заявляемое устройство от аналогичных устройств (имитаторов), где применяется прямой синтез и гетеродинный перенос частоты с пропусканием полезного сигнала через фильтр.
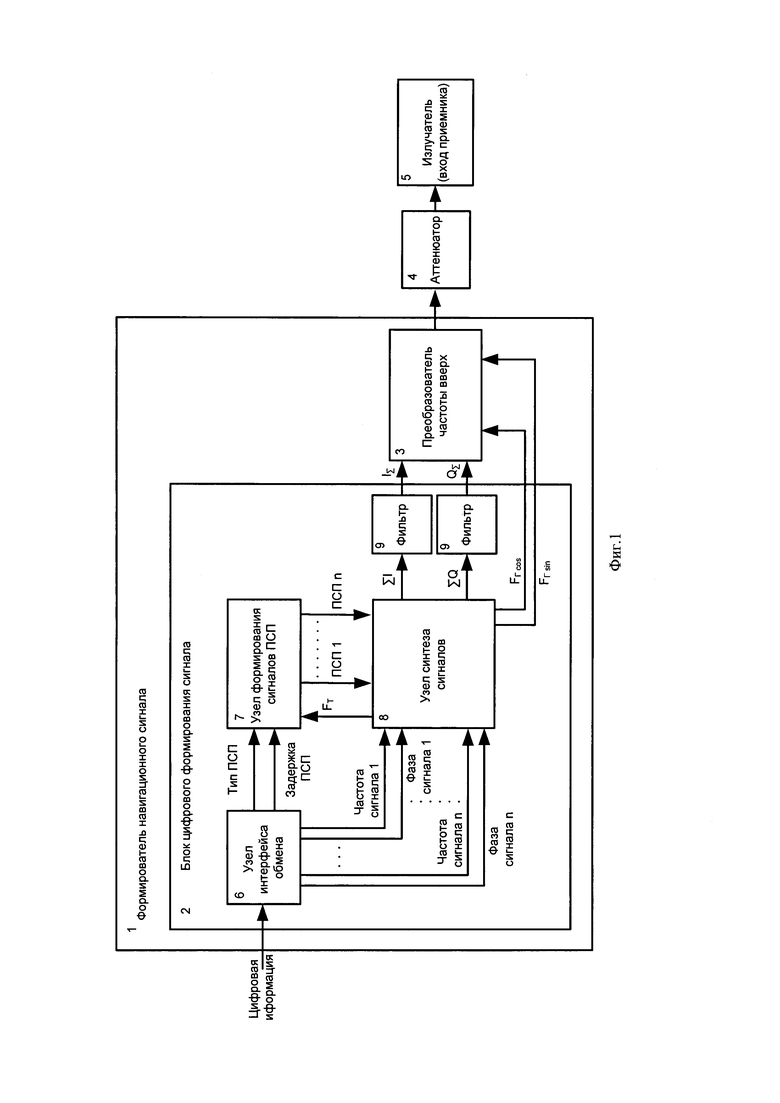
Имитатор навигационных радиосигналов поясняется фиг. 1 и состоит из формирователя навигационного сигнала 1 с цифровым интерфейсом на входе в составе блока цифрового формирования 2, преобразователя частоты вверх 3 и аттенюатора 4. Выходы блока цифрового формирования 2 являются выходом I- и Q-составляющих реального навигационного сигнала заданной группировки НКА на промежуточной частоте и выходом гетеродинных сигналов, требуемых для квадратурного переноса сигнала в рабочую ВЧ-область. Выход преобразователя частоты вверх 3 является выходом требуемого навигационного сигнала заданной группировки НКА на частоте излучения заданной СРНС, который через аттенюатор 4, подключен к антенне излучателя (или входу приемника навигационного сигнала) 5. Блок цифрового формирования сигнала 2 состоит из узла интерфейса обмена 6, соединенного с узлом формирования сигналов ПСП 7 и узлом синтеза сигналов 8, также соединенных между собой, и двух фильтров 9.
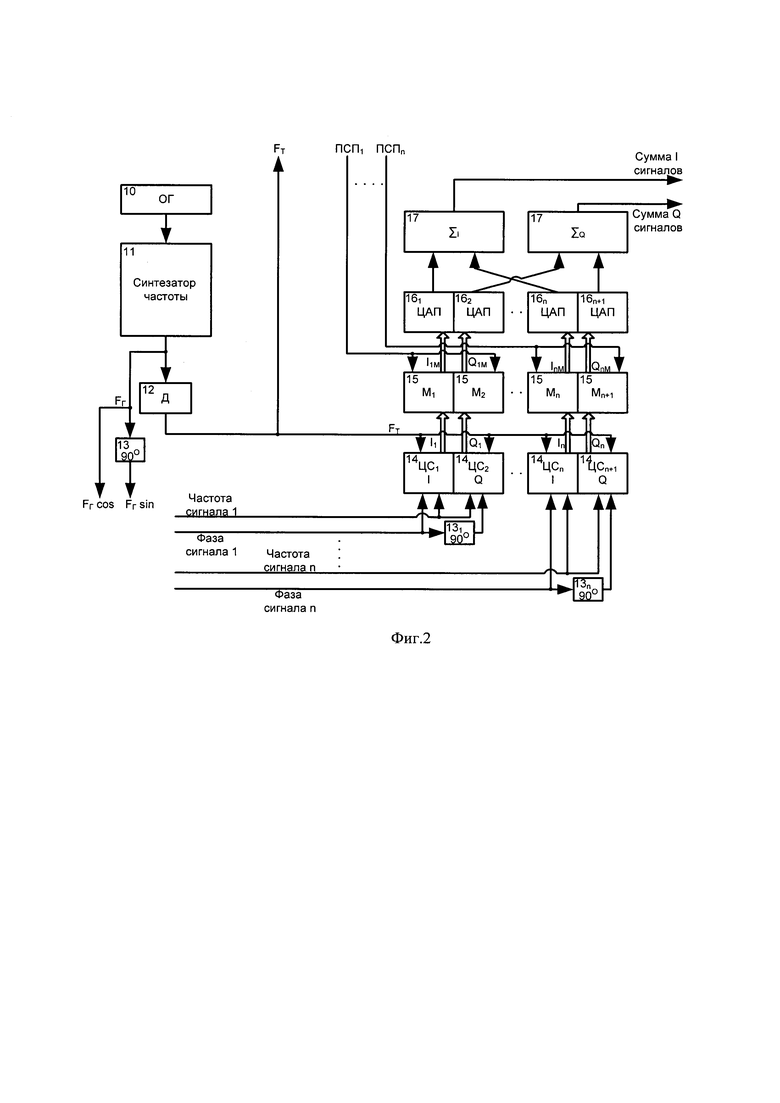
Узел синтеза сигналов 8 поясняется фиг. 2, и состоит из:
- опорного генератора 10 (на фиг. 2 обозначен - ОГ);
- синтезатора частоты 11;
- делителей частоты 12 (на фиг. 2 обозначены - Д);
- фазовращателей 13 (на фиг. 2 обозначены - 90°);
- цифровых синтезаторов 14 (на фиг. 2 обозначены - ЦСn);
- модуляторов ПСП 15 (на фиг. 2 обозначены - Mn);
- цифро-аналоговых преобразователях 16 (на фиг. 2 обозначены - ЦАП);
- сумматоров 17 (на фиг. 2 обозначены - ∑I и ∑Q),
где n - количество каналов синтеза I- и Q-сигналов.
Устройство работает следующим образом. В формирователь навигационного сигнала 1 по стандартному цифровому интерфейсу передается массив цифровой информации с параметрами навигационного сигнала, соответствующих требуемому типу спутниковой радионавигационной системы, составу и характеру движения группировки НКА, характеру движения навигационной аппаратуры потребителя и т.д.. Далее, путем цифрового синтеза в блоке цифрового формирования навигационного сигнала 2 происходит формирование навигационного сигнала на ПЧ с нормированной погрешностью в соответствии с полученными параметрами. Далее сигналы с блока цифрового формирования навигационного сигнала 2 поступают на вход преобразователя частоты вверх 3 для преобразования в навигационный сигнал на частоте излучения заданной СРНС. После преобразователя частоты вверх 3 сигнал ослабляется аттенюатором 4 до уровней реальных сигналов от НКА (или до любого другого требуемого уровня). После чего сигнал излучается излучателем 5, либо подается по высокочастотному кабелю непосредственно на антенный вход приемника навигационного сигнала.
Блок цифрового формирования навигационного сигнала 2 служит для формирования I- и Q-составляющих требуемого навигационного сигнала на промежуточной частоте. Цифровая информация с параметрами требуемого сигнала поступает от внешнего устройства в узел интерфейса обмена 6, где преобразуется в данные для узла формирования сигналов ПСП 7 и параметры частоты и фазы сигналов НКА для узла синтеза сигналов 8. Созданные в узле формирования сигналов ПСП 7 промежуточные сигналы модулируют в узле синтеза сигналов 8 несущие сигналы I- и Q-составляющих, дальномерным кодом. Несущие сигналы I- и Q-составляющих сгенерированы в соответствие с поступающими из узла интерфейса обмена 6 параметрами частоты и фазы. В узле синтеза сигналов 8 генерируются сигнал синхронизации ПСП FТ и сигналы гетеродина FГ cos и FГ sin, необходимые для переноса и преобразования I- и Q-составляющих на ПЧ в навигационный сигнал требуемой частоты. Перед поступлением суммы I- и Q-составляющих в преобразователь частоты вверх, сигналы на промежуточной частоте проходят через фильтр 9, для выделения полезного сигнала.
Узел интерфейса обмена 6 и узел формирования сигналов ПСП 7 могут быть выполнены аналогично прототипу.
Узел синтеза сигналов 8 имеет синтезатор частоты 11, который, используя в качестве опорной частоты сигнал внутреннего кварцевого ОГ 10, формирует сигнал гетеродина FГ (он же FГcos), из которого при помощи фазовращателя 13 получается второй опорный сигнал FГsin, необходимый для квадратурного преобразования частоты. При помощи делителя Д 12 из сигнала гетеродина FГ получается частота синхронизации FТ для формирования сигналов ПСП и тактовой частоты FТ для ЦС 1…ЦС n 14. Частота и фаза сигналов в одном канале для ЦС1 и ЦС2 14 с разницей фазы в 90°, полученной при помощи фазовращателя 13, задаются таким образом, чтобы формируемые на выходе ЦС1 и ЦС2 14 цифровые сигналы соответствовали I- и Q-составляющим формируемого сигнала от НКА на ПЧ с учетом доплеровского сдвига частоты. Сигналы с ЦС1 и ЦС2 14 подаются на входы модуляторов M1 и М2 15 соответственно. На вторые входы модуляторов M1 и М2 15 подается сигнал ПСП1, а на выходе получается модулированный цифровой сигнал. С выходов модуляторов M1 и М2 15 сигнал поступает на соответствующие ЦАП для преобразования сигнала из цифровой формы в аналоговую. Таким образом, получаются I- и Q-составляющие навигационного сигнала на промежуточной частоте с учетом доплеровского сдвига, модулированного дальномерным кодом от выбранного НКА.
Аналогичная парная генерация I- и Q-составляющих сигнала от одного НКА на ПЧ происходит во всех каналах формирования сигналов в узле синтеза сигналов.
Сформированные I- и Q-составляющие навигационного сигнала с каждого канала суммируются в соответствующих сумматорах ∑I и ∑Q 17. Выходы сумматоров ∑I и ∑Q 17 являются выходами узла синтеза сигналов.
Далее суммы I- и Q-составляющих (∑I и ∑Q) для всей формируемой группы навигационных сигналов проходят через фильтры 9 и поступают на вход преобразователя частоты вверх 3, на другие входы которого подаются опорные сигналы (FГ cos и FГ sin), для преобразования суммы I- и Q-составляющих (∑I и ∑Q) в навигационный сигнал на частоте излучения заданной СРНС. После преобразователя частоты вверх 3 сигнал ослабляется аттенюатором 4 до уровней реальных сигналов от НКА (или до любого другого требуемого уровня). После чего сигнал излучается излучателем 5, либо подается по высокочастотному кабелю непосредственно на антенный вход приемника навигационного сигнала.
Использование раздельного синтеза I- и Q-составляющих от одного НКА позволяет использовать для преобразования частоты вверх принцип квадратурного преобразования, где на выходе не требуются фильтры для подавления зеркального канала, что улучшает имитационные характеристики формирователя навигационных сигналов за счет более равномерного ГВЗ. В качестве группы функциональных узлов требуемых для формирования одной пары I- и Q-составляющих навигационного сигнала (ЦС1 и ЦС2 14, M1 и М2 15, соответствующие ЦАП 16) можно использовать квадратурный синтезатор на принципе прямого цифрового синтеза (например, AD9854ASQ), позволяющий значительно сократить массогабаритные параметры и значительно упростить схемотехническую реализацию. Сохраненное при этом разделение общей схемы управления формированием сигналов на самостоятельные узлы интерфейса обмена цифровой информацией, формирования сигналов ПСП и синтеза сигналов на ПЧ позволяет отказаться от встроенной ЭВМ в имитаторе и задавать параметры требуемого навигационного сигнала во внешнем устройстве, что существенно сокращает массогабаритные характеристики схемной реализации устройства (например, в виде модуля в конструктиве «Евромеханика») и упрощает его использование в составе любой испытательной или навигационной аппаратуры различного назначения.
За счет более равномерного ГВЗ реализация данного технического решения позволяет создать устройство, обладающее лучшими имитационными характеристиками. Применение единых микросхем, для формирования модулированных I и Q составляющих НС на ПЧ, позволяет создать устройство с минимальной аппаратной избыточностью и малыми габаритами, что позволит легко встраивать его в стороннею аппаратуру обеспечивая формирование набора сигналов спутниковых радионавигационных систем ГЛОНАСС и GPS, соответствующих вектору состояния космического аппарата, движущегося по произвольной траектории во всем диапазоне скоростей, вплоть до второй космической скорости включительно, в том числе с учетом влияния дестабилизирующих факторов космического пространства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2004 |
|
RU2280260C1 |
| МНОГОКАНАЛЬНЫЙ КОРРЕЛЯТОР И ПРИЕМНИК НАВИГАЦИОННЫЙ | 2008 |
|
RU2388009C2 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| ЦИФРОВОЙ ИМИТАТОР СИГНАЛОВ N-ЭЛЕМЕНТНОЙ АНТЕННОЙ РЕШЕТКИ ГНСС | 2023 |
|
RU2800773C1 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ РАДИОСИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ GPS И ГЛОНАСС | 1999 |
|
RU2173862C2 |
Изобретение относится к области радионавигации и может быть использовано для формирования радиосигналов, подобных навигационным от космических аппаратов (КА) глобальных спутниковых радионавигационных систем (СРНС) ГЛОНАСС и GPS. Достигаемый технический результат - упрощение имитатора и улучшение характеристик выходного сигнала, подобных реальным от спутниковых радионавигационных систем ГЛОНАСС и GPS. Указанный результат достигается тем, что имитатор навигационных сигналов содержит блок цифрового формирования сигнала (БЦФС), преобразователь частоты вверх, аттенюатор, при этом БЦФС состоит из узла интерфейса обмена, узла формирования сигналов псевдослучайной последовательности, узла синтеза сигналов, фильтра и дополнительного фильтра. Перечисленные средства, входящие в состав имитатора, выполнены и соединены между собой определенным образом. 1 з.п. ф-лы, 2 ил.
1. Имитатор навигационных радиосигналов навигационных космических аппаратов, содержащий формирователь навигационного сигнала, который состоит из блока цифрового формирования сигнала (БЦФС) и преобразователя частоты вверх, выход которого соединен с входом аттенюатора, выход аттенюатора соединен с излучателем или входом навигационного приемника, при этом БЦФС состоит из узла интерфейса обмена, узла формирования сигналов псевдослучайной последовательности (ПСП), узла синтеза сигналов и фильтра, при этом вход узла интерфейса обмена является входом имитатора, первая группа выходов узла интерфейса обмена соединена с первой группой входов узла формирования сигналов ПСП, а вторая группа выходов соединена с первой группой входов узла синтеза сигналов, вторая группа входов узла синтеза сигналов соединена с группой выходов узла формирования сигналов ПСП, причем узел синтеза сигналов состоит из опорного генератора, синтезатора частоты, делителя частоты, цифровых синтезаторов (ЦС), модуляторов, при этом выход делителя частоты узла синтеза сигналов, являющейся выходом сигнала синхронизации и тактовой частоты, соединен соответственно с входом синхронизации узла формирования сигналов ПСП и с вторыми входами ЦС, первая группа входов которых является первой группой входов узла синтеза сигналов, вторая группа входов узла синтеза сигналов является входами модуляторов, отличающийся тем, что в узел синтеза сигналов введены первый фазовращатель, вторые фазовращатели, а также дополнительные цифровые синтезаторы, дополнительные модуляторы, цифроаналоговые преобразователи (ЦАП), сумматоры, а в БЦФС введен дополнительный фильтр, при этом узел синтеза сигналов формирует синфазную и квадратурную составляющие навигационного сигнала на промежуточной частоте (ПЧ), вход первого фазовращателя соединен с выходом синтезатора частоты, а выход первого фазовращателя является выходом узла синтеза сигналов, образующим с сигналом синтезатора частоты группу выходных гетеродинных сигналов FГ cos и FГ sin на выходе блока БЦФС, поступающих на преобразователь частоты вверх, на вход вторых фазовращателей подается один из сигналов первой группы входов узла синтеза сигналов, выходы вторых фазовращателей соединены с введенными дополнительными цифровыми синтезаторами, формирующими квадратурную составляющую навигационного сигнала (НС) на ПЧ, на вторые входы дополнительных ЦС поступают сигналы тактовой частоты с выхода делителя частоты, выходы ЦС соединены с первыми входами соответствующих модуляторов, вторые входы модуляторов являются второй группой входов узла синтеза сигналов, выходы модуляторов соединены с входами ЦАП, выходы ЦАП, преобразующие синфазные и квадратурные составляющие сигналов на ПЧ, соединены с входами соответствующих сумматоров, выходы сумматоров являются выходами синфазной и квадратурной составляющей НС на ПЧ узла синтеза сигналов, синфазный выход соединен с входом фильтра, квадратурный выход соединен с входом дополнительно введенного фильтра, выходы фильтров являются выходами БЦФС синфазной и квадратурной составляющих НС на ПЧ, соединенными с входами преобразователя частоты вверх;
2. Устройство по п. 1, отличающееся тем, что преобразователь частоты вверх реализован на принципе квадратурного преобразования, имея на входе гетеродинную группу сигналов FГ cos и FГ sin, соединенную с гетеродинной группой выходов БЦФС, первый вход преобразователя частоты вверх является входом синфазной составляющей НС, соединенным с выходом синфазной составляющей БЦФС, второй вход является входом квадратурной составляющей НС, соединенным с выходом квадратурной составляющей БЦФС.
| Способ повышения несущей способности армированного ледяного покрова | 1959 |
|
SU123976A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ АППАРАТУРЫ НАВИГАЦИИ | 2006 |
|
RU2318189C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОВЕРКИ УСТРОЙСТВ, ПОЗВОЛЯЮЩИХ ОПРЕДЕЛЯТЬ МЕСТОПОЛОЖЕНИЕ С ИСПОЛЬЗОВАНИЕМ ВСПОМОГАТЕЛЬНЫХ ДАННЫХ | 2003 |
|
RU2328016C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ФОРМИРОВАНИЯ ПСЕВДОДАЛЬНОСТИ НАВИГАЦИОННОГО СИГНАЛА | 2012 |
|
RU2498225C1 |
| US 5841396 A, 24.11.1998 | |||
| US 5621646 A, 15.04.1997 | |||
| JP 2004309307 A, 04.11.2004 | |||
| WO 2004070415 A1, 19.08.2004. | |||

