Изобретение относится к метрологии и может использоваться для определения весовых и триботехнических характеристик крупногабаритных транспортных и иных объектов.
Известно устройство для измерения массы в невесомости, содержащее контейнер с размещенной в нем измеряемой массой, блок управления и датчик положения, отличающееся тем, что устройство дополнительно содержит статор двигателя, первый и второй электромагниты, первый и второй регуляторы индукции, выходы которых соединены соответственно с входами первого и второго электромагнитов, а входы - с первым и вторым выходами блока управления, последовательно соединенные детектор рассогласования, блок идентификации и индикатор, а также задатчик идентифицирующего сигнала, выход которого соединен со вторым входом блока управления, третий и четвертый выходы которого соединены соответственно с первым входом детектора рассогласования и входом статора двигателя, выход датчика положения соединен с первым входом блока управления, вторым входом детектора рассогласования и вторым входом блока идентификации, а на контейнере установлены, например, две ферромагнитные шайбы и стальное кольцо ротора (Пат. №2207520 РФ Опубликовано: 27.06.2003 Бюл. №18).
Известно устройство измерения коэффициента сцепления колеса с поверхностью аэродромных и дорожных покрытий, содержащее измерительное колесо, расположенное на двухколесной буксируемой установке с несущими колесами, первый редуктор или цепную передачу, независимый груз, тормозной генератор постоянного тока, датчики угловых скоростей вращения измерительного колеса и несущих колес, аккумуляторную батарею, усилитель напряжения и пульт управления, причем измерительное колесо кинематически соединено через первый редуктор с ротором тормозного генератора, независимый груз установлен на измерительное колесо, аккумуляторная батарея подключена к силовому входу усилителя напряжения, а датчики угловых скоростей вращения кинематически соединены с осями измерительного и несущих колес, отличающееся тем, что в него дополнительно введены нагрузочный двигатель постоянного тока с независимой обмоткой возбуждения, датчик тока торможения якорной цепи тормозного генератора, датчик тока возбуждения обмотки возбуждения нагрузочного двигателя, блок вычисления разности, второй редуктор и система автоматического управления, причем якорные обмотки тормозного генератора и нагрузочного двигателя электрически соединены друг с другом встречно-параллельно, а тормозной генератор выполнен с постоянным возбуждением, ротор нагрузочного двигателя кинематически соединен через второй редуктор с осью вращения несущих колес, силовой выход усилителя напряжения соединен с независимой обмоткой возбуждения нагрузочного двигателя, датчик тока торможения включен в цепь якорных обмоток тормозного генератора и нагрузочного двигателя, датчик тока возбуждения включен в цепь питания независимой обмотки возбуждения нагрузочного двигателя, выход блока вычисления разности подключен к управляющему входу усилителя напряжения, положительный вход блока вычисления разности подключен к первому выходу пульта управления, отрицательный вход блока вычисления разности соединен с выходом системы автоматического управления, выходы датчиков угловых скоростей измерительного и несущих колес и выходы датчиков тока торможения тормозного генератора и тока возбуждения нагрузочного двигателя подключены к четырем входам системы автоматического управления, а ее пятый вход подключен ко второму выходу пульта управления. Также система автоматического управления содержит последовательно соединенные первый блок вычисления ошибки, делитель, второй блок вычисления ошибки, регулятор скольжения, третий блок вычисления ошибки, регулятор тока торможения тормозного генератора, четвертый блок вычисления ошибки и регулятор тока возбуждения нагрузочного двигателя, выход которого соединен с отрицательным входом блока вычисления разности, отрицательные входы первого, третьего и четвертого блоков вычисления ошибок соединены соответственно с выходами датчика угловой скорости измерительного колеса, датчика тока торможения тормозного генератора и датчика тока возбуждения нагрузочного двигателя, положительный вход первого блока вычисления ошибки и второй вход делителя соединены с выходом датчика угловой скорости несущих колес, а положительный вход второго блока вычисления ошибки соединен со вторым выходом пульта управления (Пат. №2369856 РФ Опубликовано: 10.10.2009 Бюл. №28).
Наиболее близкой по технической сущности является электромеханическая система, содержащая магнитопровод с сетевой обмоткой, соединенной с источником питания через устройство управления, вращающуюся короткозамкнутую вторичную обмотку, на внутренней поверхности которой нанесена резьба, и вал, на наружной поверхности которого также нанесена резьба с образованием между вращающейся вторичной обмоткой и валом резьбового соединения, обеспечивающего при вращении вторичной обмотки перемещение вала в осевом направлении, на торцах магнитопровода установлены кольца из антифрикционного материала, образующие между собой и торцевыми частями вращающейся вторичной обмотки подшипник скольжения, при этом к одному концу вала жестко прикреплен запорный элемент, а в кольца встроены по крайней мере два параметрических измерительных датчика, которые одними своими разъемами соединены друг с другом, к одному из этих разъемов присоединено своим первым входом устройство управления, второй вход которого соединен со средней точкой вторичной обмотки трансформатора, к концам которой подсоединены другими своими разъемами параметрические измерительные датчики, первичная обмотка трансформатора подключена к источнику питания. (Пат. №2736387 РФ Опубликовано: 16.11.2020 Бюл. №32).
Недостатками этих устройств является низкая функциональность вследствие отсутствия или возможности определения одного физического параметра исследуемого объекта (только масса или только коэффициент сцепления) и отсутствие защиты от перегрузки.
Задачами заявляемого изобретения являются обеспечение возможности определения массы и коэффициента трения исследуемого объекта и защита устройства от перегрузки.
Технический результат, достигаемый в процессе решения поставленной задачи, заключается в повышении функциональности и надежности измерительной системы.
Это является следствием использования блока обработки информации, соответствующей мгновенным значениям наблюдаемых параметров электромеханической системы.
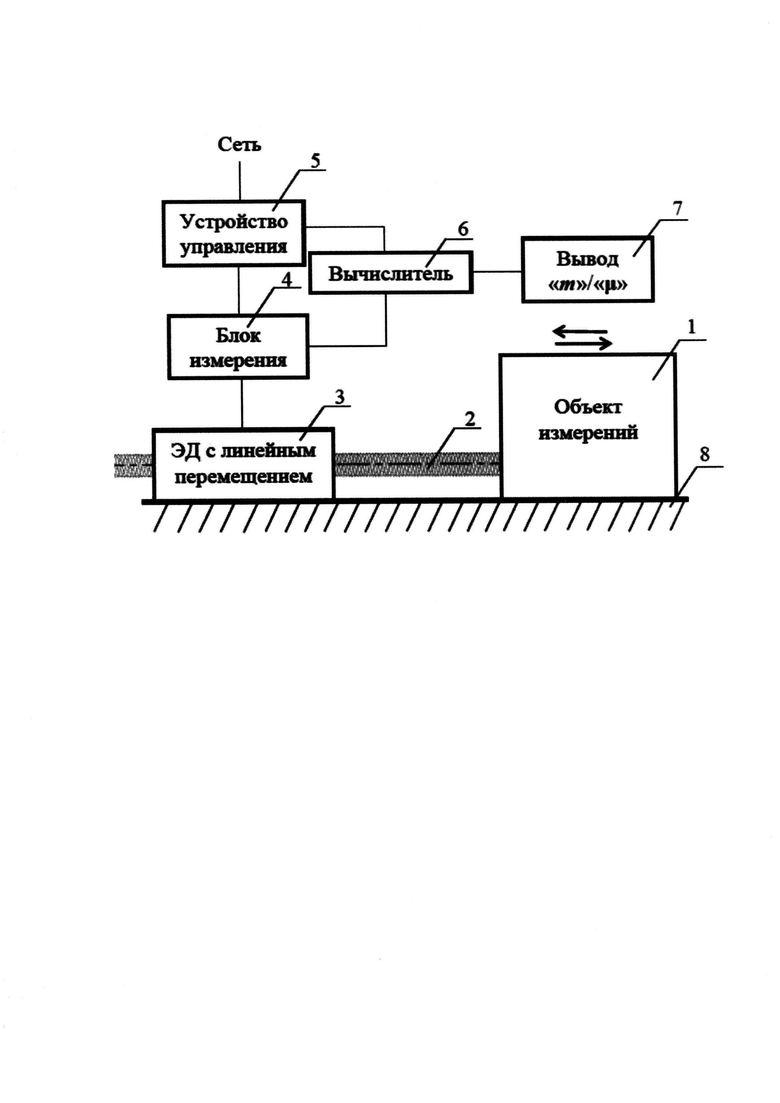
Сущность предлагаемого изобретения поясняет фигура, где 1 - объект измерений, для которого определяются его масса (m) или коэффициент трения (μ), 2 - тяга, 3 - электродвигатель с линейным перемещением исполнительного элемента, 4 - блок измерения наблюдаемых электрических параметров, 5 - устройство управления, 6 - программируемое вычислительное устройство (Вычислитель), 7 - устройство вывода величин «m» и коэффициента трения «μ» объекта измерений, 8 - опорная поверхность (аэродромное или дорожное покрытия, железнодорожные рельсы и т.п.).
Электродвигатель с линейным перемещением исполнительного элемента 3, состоит из магнитопровода с сетевой обмоткой, подключаемой к сети через блок измерения наблюдаемых электрических параметров 4 и устройство управления 5, вращающейся короткозамкнутой вторичной обмотки, на внутренней поверхности которой нанесена резьба, тяги 2, на наружной поверхности которой также нанесена резьба с образованием между вращающейся вторичной обмоткой и тягой резьбового соединения, обеспечивающего при вращении вторичной обмотки перемещение тяги 2 в осевом направлении, при этом один из концов тяги 2 допускает механическое присоединение объекта измерений 1.
Измерительная электромеханическая система в блоке измерения 4 использует датчики наблюдаемых электрических параметров, включаемые в количество фаз трехфазной сети, определяемое используемой схемой измерения электрических величин (одно-, двух- или трехфазное подключение). Датчики информационно связаны с программируемым вычислительным устройством 6, в которое внесена начальная информация о параметрах электродвигателя с линейным перемещением исполнительного элемента 3 (без механического соединения 2 с объектом измерений 1), жестко закрепленного на опорной поверхности 8. Программируемое вычислительное устройство 6 также содержит информацию о допустимых значениях параметров электродвигателя 3. Для вывода результатов измерений используется устройство вывода 7.
Измерительная электромеханическая система работает следующим образом.
Перед началом измерений объект измерений 1 устанавливается без ограничения поступательного движения на опорной поверхности 8 и механически соединяется с тягой 2, являющейся неотъемлемой конструкционной частью электродвигателя 3, жестко закрепленного на опорной поверхности 8. В качестве электродвигателя используется электромеханический преобразователь, электрические величины которого соответствующие режиму работы до присоединения объекта измерений 1 вносятся в программируемое вычислительное устройство 6. Также до проведения измерений в программируемое вычислительное устройство 6 вносятся значения предельно допустимые значения параметров электродвигателя 3.
При подаче от устройства управления 5 напряжения на первичную обмотку электродвигателя с линейным перемещением исполнительного элемента 3 в результате электромагнитного и механического преобразования энергии двигатель 3 приводит в линейное поступательное движение тягу 2 и механически связанный с ней объект измерений 1. При этом происходит изменение наблюдаемых электрических величин, соответствующее режиму нагрузки двигателя 3 при перемещении объекта измерения 1, и фиксируемых блоком измерений 4. Измеренные блоком 4 значения передаются в программируемое вычислительное устройство 6, которое рассчитывает массу «m» или коэффициент трения «μ» сопряженной поверхности объекта измерений 1 относительно опорной поверхности 8 на основе сравнения технических характеристик двигателя 3 без механического соединения тяги 2 с объектом измерений 1 и измеренных блоком 4 значений при перемещении объекта измерений 1. Вычисленные в программируемом вычислительном устройстве 6 значения массы (m) и коэффициента трения (μ) передаются на устройство вывода 7.
В процессе измерений при получении информации от блока измерений 4 для вычисления массы Вычислитель 6 использует выражение [К.К. Ким, С.Н. Иванов. «Повышение эффективности электропривода магистральных задвижек». Известия СПбГЭТУ «ЛЭТИ» - 2020. - №3. - С. 71-77]:

для вычисления коэффициента трения:

где p - число пар полюсов; m1 - число фаз; ΔU1 - изменение напряжения вследствие перемещения объекта измерения; ƒ1 - частота питающего напряжения; Δs - изменение скольжения вследствие перемещения объекта измерения; dp - наружный диаметр тяги;  - активные сопротивления;
- активные сопротивления;  - индуктивные сопротивления статора и ротора двигателя; Dcp - приведенный диаметр сил трения в резьбовой части; ƒ - коэффициент трения в резьбовой части; θ - угол подъема резьбы; ϕ - угол трения в резьбе;
- индуктивные сопротивления статора и ротора двигателя; Dcp - приведенный диаметр сил трения в резьбовой части; ƒ - коэффициент трения в резьбовой части; θ - угол подъема резьбы; ϕ - угол трения в резьбе;  - ускорение силы тяжести.
- ускорение силы тяжести.
В выражениях (1), (2) технические характеристики двигателя 3 без механического соединения тяги 2 с объектом измерений 1 определяются из справочных данных или находятся по стандартной методике, приведенной в ГОСТ 7217-87 «Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний», характеристики резьбового соединения -по ГОСТ 9484-81 «Основные нормы взаимозаменяемости. Резьба трапецеидальная. Профили».
Технические характеристики двигателя 3, измеренные блоком 4 при перемещении объекта измерений 1, входящие в приведенные выше формулы, поступают из блока измерений 4.
Рассчитанные на основе сравнения предварительно внесенной информации и текущего значения параметров состояния электродвигателя в «вычислителе» 6 значения массы и коэффициента трения передаются на выходной блок 7.
Если в процессе перемещении двигателем 3 объекта измерений 1, измеренные блоком 4 параметры электродвигателя 3 превысили предельно допустимые значения, программируемое вычислительное устройство 6 формирует сигнал устройству управления 5, которое отключает электродвигатель 3 от сети.
Таким образом, использование программируемого вычислительного устройства (Вычислителя), сравнивающего измеряемые значения электрических параметров электродвигателя при перемещении объекта измерения с предварительно внесенными значениями тех же параметров электродвигателя без перемещения объекта измерения и их предельно допустимые значения, позволяет вычислить массу и коэффициент трения объекта измерения относительно опорной поверхности, расширяет функциональные характеристики измерительной системы и повышает ее надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| Адаптивная система управления электромеханическим устройством торможения колеса | 2016 |
|
RU2643305C1 |
| Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос | 2016 |
|
RU2647336C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С СИСТЕМОЙ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СТВОРОК | 2003 |
|
RU2323360C2 |
| Устройство измерения коэффициента сцепления колес с аэродромным покрытием | 2015 |
|
RU2612074C1 |
| ГРУППОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 2006 |
|
RU2331131C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2012 |
|
RU2521788C2 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| ПОРТАТИВНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ИСКУССТВЕННЫМ ПОКРЫТИЕМ | 2009 |
|
RU2388865C1 |
| Электропривод постоянного тока по системе генератор-двигатель с упругим звеном и способ для его управления | 1987 |
|
SU1723649A1 |
Изобретение относится к метрологии и может использоваться для определения весовых и триботехнических характеристик крупногабаритных транспортных и иных объектов. Измерительная электромеханическая система определяет массовые или триботехнические характеристики объекта измерения на основе наблюдения и обработки параметров электродвигателя с линейным перемещением исполнительного элемента, механически связанного с объектом измерений. Технический результат заключается в повышении функциональности и надежности измерительной системы. Это является следствием использования блока обработки информации, соответствующей мгновенным значениям наблюдаемых параметров электромеханической системы. Использование программируемого вычислительного устройства, сравнивающего измеряемые значения электрических параметров электродвигателя при перемещении объекта измерения с предварительно внесенными значениями тех же параметров электродвигателя без перемещения объекта измерения и их предельно допустимые значения, позволяет вычислить массу и коэффициент трения объекта измерения относительно опорной поверхности, расширяет функциональные характеристики измерительной системы и повышает ее надежность. 1 ил.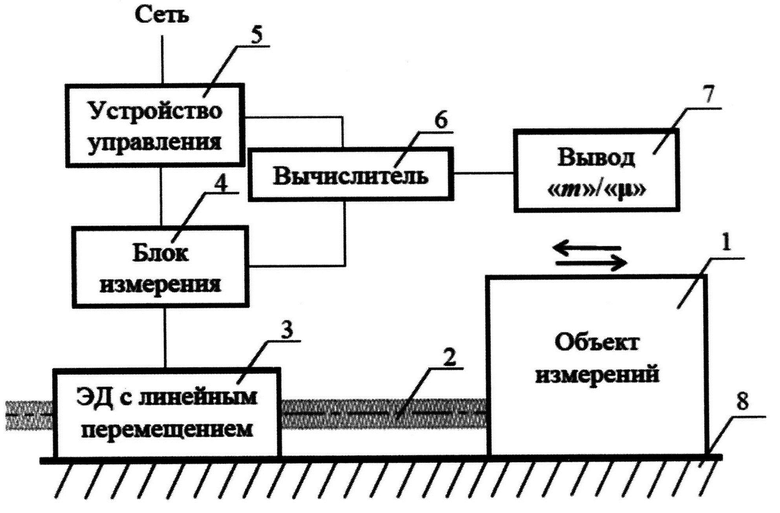
Измерительная электромеханическая система, содержащая электродвигатель с первичной обмоткой, подключенной к сети через устройство управления и блок измерений, с вторичной вращающейся короткозамкнутой обмоткой, на внутренней поверхности которой нанесена резьба, и тягой, являющейся неотъемлемой конструктивной частью электродвигателя, на наружной поверхности которой также нанесена резьба с образованием между вторичной вращающейся обмоткой и тягой резьбового соединения, обеспечивающего при вращении вторичной обмотки перемещение тяги в осевом направлении, отличающаяся тем, что электродвигатель жестко закреплен на опорной поверхности и механически связан с тягой, один из концов которой допускает механическое присоединение объекта измерений, установленного без ограничения поступательного движения на опорной поверхности, и система включает в себя программируемое вычислительное устройство, принимающее информацию о параметрах электродвигателя с блока измерений при линейном перемещении объекта измерений тягой электродвигателя, содержащее значения параметров электродвигателя, соответствующие режиму его работы без присоединения объекта измерения, и выполненное с возможностью вычисления массы и коэффициента трения объекта измерения на основе значений измеренных параметров электродвигателя в режиме перемещения объекта измерений на опорной поверхности, кроме этого программируемое вычислительное устройство выполнено с возможностью формирования сигнала для устройства управления, выполненного с возможностью отключения электродвигателя от сети, если измеренные параметры электродвигателя в режиме перемещения объекта измерений на опорной поверхности превышают предельно допустимые значения.
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ЗАПОРНОЙ АРМАТУРЫ | 2020 |
|
RU2736387C1 |
| 1971 |
|
SU411375A1 | |
| Способ количественного определения сернистых соединений в водороде | 1959 |
|
SU130707A1 |
