Изобретение относится к электронной технике и может быть использовано для функционально-диагностического контроля радиолокационных станций (РЛС).
Известны аппаратный, программно-аппаратный и программный способы и устройства для диагностики электронных устройств. В последнем случае устройство реализуется на основе персонального компьютера (ПК), когда объект диагностирования непосредственно подключается через стандартный интерфейс к ПК для осуществления алгоритма поиска неисправности. Недостатками такого способа подключения является в ряде случаев снижение быстродействия, усложнение устройства, поскольку многие объекты диагностирования не содержат диагностического стандартного интерфейса. По сравнению с использованием аппаратно реализованного сигнатурного анализатора снижается быстродействие устройства контроля [1]. Известны способ и устройство контроля с использованием самоорганизации ЭВМ на принципе раскрутки при минимальной конфигурации ядра раскрутки с последовательным расширением устройств контроля, которые после их проверки сами становятся более многофункциональными элементами расширяющегося диагностического ядра, обеспечивающего нарастающую проверку других устройств. Примером такого способа и устройства является встроенная организация контроля персонального компьютера при его включении - система BIOS [2]. Известна автоматизированная система управления радиолокационным комплексом, включающая рабочее место оператора с системой отображения информации и ЭВМ рабочего места оператора, ЭВМ обработки информации и аппаратуру РЛС. Управление режимами работы РЛС осуществляется с рабочего места оператора с помощью графических интерфейсов со встроенными меню задания режимов работы. Информационный обмен между системами осуществляется с помощью стандартных интерфейсов. Система управления обеспечивает встроенный контроль, сбор информации на основе самоорганизации ЭВМ с последующим контролем цифровых устройств, которые соединены с ЭВМ стандартными интерфейсами. Недостатком системы является отсутствие полной структуры встроенного контроля и диагностики аналоговых устройств и всего комплекса радиоэлектронной системы [3].
Известна универсальная встроенная иерархическая система диагностирования сложных радиоэлектронных комплексов [4]. Эта многоуровневая система диагностирования электронных подсистем содержит функциональную (рабочую) магистраль, центральное и локальные диагностические ядра (рис. 1, рис. 2, стр. 48 в [4]), встроенные в соответствующие подсистемы, контуры контроля, управления, сбора, обработки информации с диагностических ядер через центральную и локальные диагностические магистрали через которые задаются режимы контроля и диагностирования, проверка информационных связей между элементами электронной системы через рабочие магистрали и (или) непосредственно, локализация неисправных элементов и отображение их состояния на подсистеме отображения информации, диагностирование отдельных контуров контроля на основе принципа раскрутки с последовательным расширением устройств и (или) централизованного принципа с последовательно- параллельной процедурами, охватываемых контролем устройств, которые после их проверки сами становятся более многофункциональными элементами диагностического ядра, способного проверять другие устройства. В тоже время в описании системы, в структурных схемах не приведены конкретные способы и структуры устройств практической реализации контроля и диагностики, например, осуществления контроля РЛС непосредственно в рабочем режиме с использованием фонового пилот-сигнала без фактического прерывания основной работы, функционально-диагностического контроля при первичном включении аппаратуры РЛС и т.д.. Известна автоматизированная система контроля и регистрации установки ядерного синтеза с развитыми интерфейсами связи с объектами контроля примерно через 500 измерительных каналов. Сбор, обработку и обобщение информации производят ЭВМ нижнего и верхнего уровней [5]. Система контроля не учитывает специфику работы РЛС. В ней не описана многоуровневая система контроля и диагностики с нарастающими контурами контроля.
Известна аппаратно-программная реализация и обеспечение стенда полунатурного моделирования для наземных испытаний космических радиолокаторов с синтезированной апертурой для проверки их сквозных характеристик [6]. Стенд обеспечивает прием и запись зондирующего сигнала от испытуемой аппаратуры, формирование зондирующего сигнала собственными средствами, имитацию отраженного сигнала (ОС), воспроизведение имитированного ОС и подачу на вход приемника испытываемой аппаратуры, обработку цифровых данных ОС и вторичную обработку радиолокационной информации. Стенд не обеспечивает оперативный, встроенный контроль радиоэлектронных систем, реализацию различных режимов контроля.
Известны способ и устройство для последовательной регистрации данных, проходящих через приемный канал (тракт) РЛС, и их последующего анализа. Предусмотрен совместный анализ входной и выходной информации подсистемы надпорогового обнаружения сигналов (обнаружитель и блок цифровой обработки сигналов) и подсистемы формирования отметок целей и сопровождения траекторий (специализированная цифровая вычислительная машина цифровой обработки информации), с их последующим сравнением с эталонными значениями в ЭВМ специализированного стенда проверки блоков цифровой обработки сигналов. Предусмотрено также отображение информации на рабочем месте оператора с подсистемой отображения информации (РМО). Таким образом осуществляется контроль подсистем при их проверке, сдаче после изготовления [7]. Стенд не обеспечивает нарастающий, сквозной, оперативный, встроенный контроль РЛС, реализацию различных режимов работы на высоких частотах.
Известна автоматизированная система контроля (АСК) и измерения параметров сигнала принимаемого на штатный приемник РЛС. В режиме реального времени обеспечен контроль временных неэквидистантных интервалов в пачке ЛЧМ-импульсов; фазы в каждом импульсе пачки; вычисление максимумов сжатого сигнала и максимальных уровней боковых лепестков корреляционной функции, расчет коэффициента подавления сигнала в устройстве селекции движущихся целей (СДЦ), проведения статистических измерения параметров [8].
Разработана АСК, измерения параметров сигналов четырехканального цифрового приемника, построенного на микросхеме 1288ХК1Т. Приемник является штатным устройством аналого-цифрового преобразования (АЦП) радиолокационного сигнала на промежуточной частоте с последующей децимацией сигнала РЛС. При помощи АСК производится статистическая оценка качества децимации видеосигнала, контроль параметров АЦП, осуществляется оценка спектров сигналов в различных сечениях цифровой обработки. Для упрощения проведения контроля на высоких частотах используются децимация и стробоскопический эффект, который обеспечивает более простое проведение измерений на низких частотах. В этом случае формируются очень короткие стробирующие импульсы, которые вырезают в исследуемом сигнале (процессе) отдельные точки за определенное число периодов. Стробирующие точки пробегают весь исследуемый процесс, воссоздавая в совокупности контролируемые параметры сигнала на определенном интервале [9,10]. Такой метод можно применять и для контроля параметров периодически повторяющихся сигналов, в том числе и сложных зондирующих сигналов РЛС. Описанные системы в представленном виде не обеспечивают оперативное встраивание их непосредственно в РЛС при проведении регламентного контроля.
Известны аппаратные быстродействующие способ и устройство для встроенного автоматизированного контроля цифровой подсистемы на основе сигнатурного анализатора. Устройство контроля обеспечивает генерацию тестов, автоматическую диагностику с записью информации о неисправных цифровых узлах и самого устройства в регистр результата и их отображение на блоке индикации-устройстве отображения [11]. Устройство представляет собой ранее описанную жесткую структуру с аппаратным способом диагностики (рис. 1, стр. 55 [1]) и предназначено для автономного контроля цифровых подсистем, не имеет возможности обеспечивать обобщение и передачу диагностической информации на верхний уровень управления, то есть выполнять функции локального диагностического ядра в сложной иерархической системе. В устройстве отсутствует возможность изменения режимов работы цифровой подсистемы по автоматическим командам с верхнего уровня от центрального диагностического ядра или непосредственно по команде оператора перевода ее в автономный режим контроля. Устройство не обеспечивает изменение конфигурации системы контроля или контуров контроля с целью нарастания кольца проверки, когда обеспечивается нарастание контура контроля после отдельно проверенных функциональных узлов с проверкой информационного взаимодействия уже группы этих функциональных узлов. Устройство не производит многоканальный сбор и контроль информации с аналоговых подсистем.
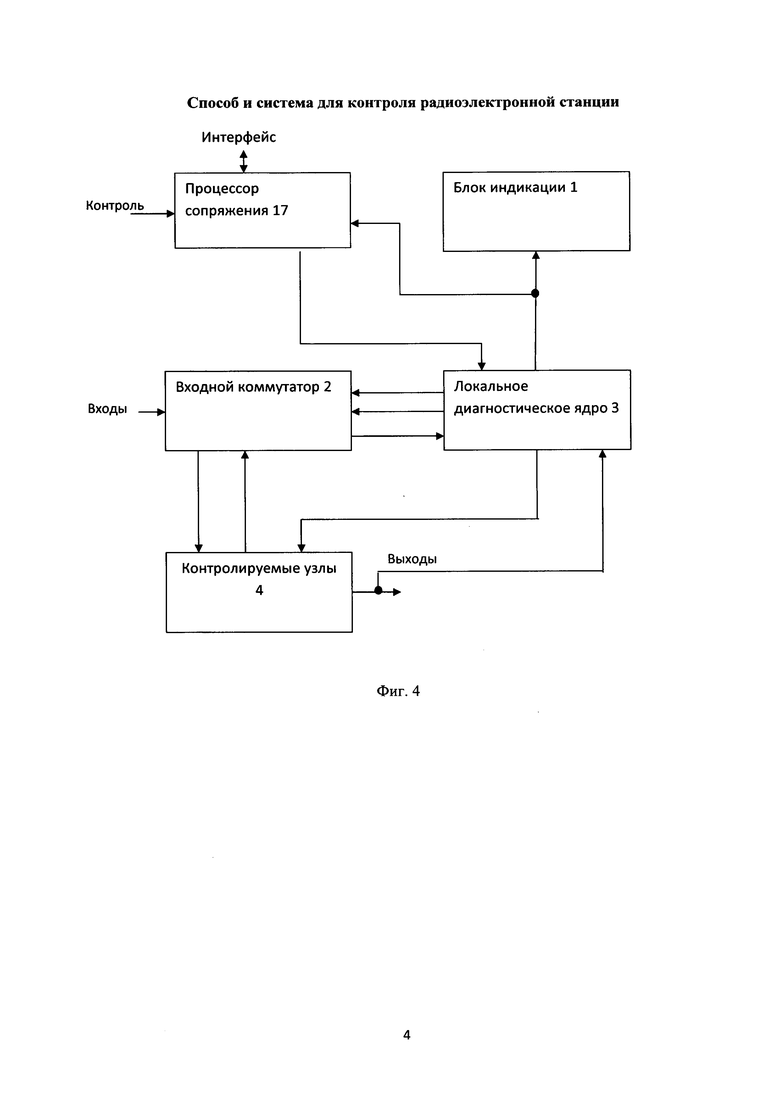
Устройство (фиг. 1) является аналогом заявляемой системы контроля. Для упрощения его представления, описания на фиг. 1 конструктивно выделено локальное диагностическое ядро 3, которое как и в [11] содержит сигнатурный анализатор со схемами управления и формирования тестовых воздействий. Назначение блока индикации 1, входного коммутатора 2, контролируемых устройств, узлов 4 такое же как и в аналоге. Для преемственности описания в дальнейшем будем полагать, что контролируемые устройства, узлы могут представлять подсистему, ее цифровую часть, устройство. По команде Контроль локальное диагностическое ядро 3 через первый выход управляет входным коммутатором 2, который отключает рабочие сигналы, и через второй выход обеспечивает подачу на входы контролируемых узлов 4 автономных тестовых сигналов. Перед началом контроля при необходимости по третьему выходу с диагностического ядра производится начальная установка контролируемых узлов, устройств. Результаты контроля отображаются на блоке индикации 1.
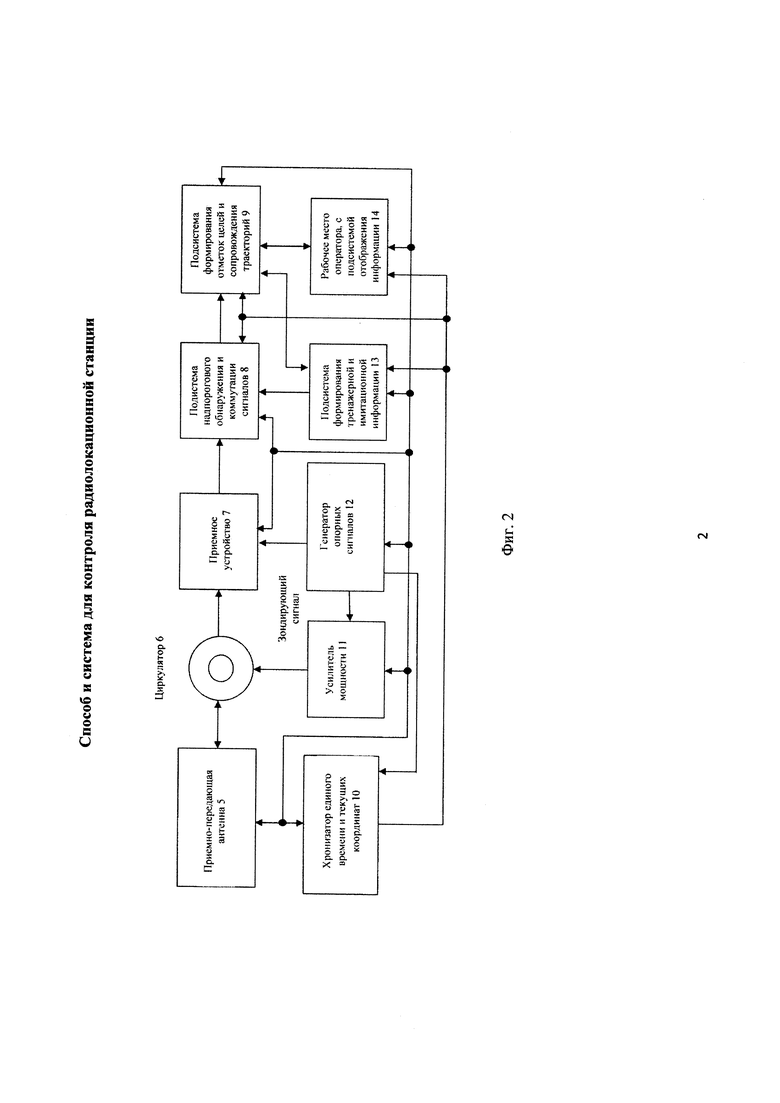
Известны комплексируемая структура построения и взаимодействия тренажерно-моделирующего комплекса с РЛС, а также описаны способ и устройство имитации радиолокационной информации [12, 13]. Описанная в [12] (стр. 6) структура тренажерно-моделирующего комплекса при исключении из нее встроенного блока формирования тренажерной и имитационной информации эквивалентна структуре унифицированной РЛС с ее общей функциональной схемой описанной в [14] (рис. 1, стр. 50) и в [7]. На фиг. 2 приведена структурная схема РЛС, в которой блок формирования тренажерной и имитационной информации [12, 13] представлен эквивалентной подсистемой формирования тренажерной и имитационной информации 13. По аналогии с общим рис. 1, соответствующих ему описаниями семейства унифицированных РЛС [7, 14], а также рисунками и их описаниями [12, 13] формирователь отметок целей и ЭВМ трассовой обработки информации объединены в одну подсистему формирования отметок целей и сопровождения траекторий 9. Подсистема формирования отметок целей и сопровождения траекторий 9 и рабочее место оператора с подсистемой отображения информации 14 имеют в своих составах специализированные ЭВМ, обеспечивающие возможности управления РЛС, самоорганизации при проведении контроля подсистемы формирования отметок целей и сопровождения траекторий 9, рабочего места оператора с подсистемой отображения информации 14, например, при включении. Управление подсистемами РЛС, информационный обмен дополнительно осуществляются, например, через центральную магистраль - магистральный интерфейс управления с рабочего места оператора с подсистемой отображения информации 14. Используются интерфейсы типа Р52070-2003, RS-485, работающие, например, в полудуплексном режиме. Практическая реализация этих подсистем, их функционирование с учетом специфики РЛС приведены в [3, 15]. Управление режимами работы РЛС осуществляется с рабочего места оператора с подсистемой отображения информации 14 с помощью графических интерфейсов с встроенными меню задания режимов работы [3, 15]. Как и в [12, 13] хронизатор единого времени и текущих координат 10 формирует текущие двоичные коды азимута, углов места, наклонной дальности сканирования воздушного пространства. Единый масштаб временной синхронизации всех подсистем задается через генератор опорных сигналов 12 и хронизатор единого времени и текущих координат 10. РЛС также содержит работающую на передачу и прием приемно-передающую антенну 5, циркулятор 6, обеспечивающий развязку приемного устройства 7 от мощного сигнала с усилителя мощности 11 при передаче его на излучение в пространство. В РЛС обеспечен ограниченный функционально-диагностический контроль, в частности, проверка цифровых вычислительных средств по принципу самоорганизации с расширяющимся диагностическим ядром. Наличие подсистемы формирования тренажерной и имитационной информации в составе РЛС позволяет контролировать состояние аппаратуры и алгоритмов работы от подсистемы надпорогового обнаружения и коммутации сигналов до подсистемы, обеспечивающей выдачу трассовой информации конечному потребителю (на фиг. 2 не показана). Обычно производится и документирование передаваемой внешним потребителям информации за определенное время подсистемой документирования (на фиг. 2 не показана). Следует отметить, что описанные способ и устройство для последовательной регистрации данных, проходящих через приемный канал (тракт) РЛС, и их последующего анализа в определенной степени дублируют построение тренажерно-моделирующего комплекса РЛС [7, 12].
В соответствии с вышеизложенным структура прототипа (фиг. 2) выполнена с возможностью управления, контроля и диагностики цифровых электронных подсистем с центральным и локальными диагностическими ядрами, функции которых выполняют ЭВМ, которые контролируют сами себя в режиме самоорганизации диагностированием отдельных контуров аппаратных средств, обработки информации на основе принципа раскрутки с последовательным расширением устройств, встроенными в соответствующие контуры контроля, управления, сбора, обработки информации, проверкой информационных связей между элементами системы через рабочие магистрали и (или) непосредственно, частичной локализацией неисправных устройств и отображением их состояния на рабочем месте оператора с подсистемой отображения информации 14. При этом ЭВМ подсистемы формирования отметок целей и сопровождения траекторий 9 эквивалентно для своей подсистемы выполняет функции диагностического ядра, а рабочее место оператора с подсистемой отображения информации 14 дополнительно для всей РЛС выполняет и функции центрального диагностического ядра, поскольку рабочее место 14 обеспечивает в многооконном графическом интерфейсе и возможность обработки диагностической информации, отображения состояния подсистем, устройств.
По сравнению с [4] теория и практика показывают, что рабочие (функциональные) высокоскоростные магистральные интерфейсы обеспечивают в режиме разделения времени и выполнение функций диагностических магистралей. В этом случае отпадает необходимость вводить отдельную центральную диагностическую магистраль, как это осуществлено на стр. 18, рис. 2 в [4]. В тоже время в РЛС из-за больших специфических локальных информационных потоков обмена информацией предусмотрены и дополнительные интерфейсы обмена между входами- выходами: подсистемы формирования тренажерной и имитационной информации и подсистемы формирования отметок целей и сопровождения траекторий, рабочего места оператора с подсистемой отображения информации и подсистемы формирования отметок целей и сопровождения траекторий.
Функциональная схема РЛС [12] с встроенным блоком формирования тренажерной и имитационной информации [12] (фиг. 2) является прототипом заявляемой системы контроля (фиг. 3). Прототип в полной мере не решает ряд задач контроля и диагностики. При контроле, диагностике РЛС не осуществляется автоматическая обработка информации с полной комплексной оценкой технических характеристик и диагностикой составных частей в виде наборов подсистем, законченных функциональных устройств и узлов путем использования двойственного набора параметров, являющихся диагностическими, техническими и перекрывающих информационное поле, характеризующее состояние как системы в целом, так и составляющих ее подсистем. Отсутствуют последовательные расширяющиеся кольца сквозных проверок групп аналоговых и (или) цифровых подсистем, всей системы, путем последовательных вводов контрольных сигналов идущих на передачу через аттенюаторы, ответвители и высокочастотные коммутаторы в сечения приемного тракта включая и приемно-передающую антенну 5 с имитацией комплексных отраженных сигналов, поэтапным последовательным контролем прохождения отраженных сигналов, локализацией неисправностей в промежуточных сечениях прохождения контрольных сигналов путем их комплексного последовательного логического совместного анализа при работе РЛС на прием с визуальным отображением отметок контрольных сигналов на рабочем месте оператора с подсистемой отображения информации.
Предлагаемым способом и системой для контроля радиолокационной станции (фиг. 3) решаются задачи расширения функциональных возможностей. Для достижения технического результата в способе контроля радиолокационной станции (РЛС) с использованием центрального и локальных диагностических ядер, встроенных в соответствующие контуры управления, заданием режимов работы и контроля с рабочего места оператора с подсистемой отображения информации, сбора, обработки информации с этих ядер через магистральный интерфейс управления, определением неисправных подсистем, устройств, узлов и отображением их состояния на подсистеме отображения информации, диагностированием отдельных контуров контроля на основе расширяющегося ядра с последовательным увеличением набора контролируемых устройств и (или) централизованного принципа с последовательно- параллельной процедурами, охватываемых контролем устройств, которые после их проверки сами становятся составляющими более многофункционального диагностического ядра, способного проверять другие устройства, дополнительно, контроль осуществляется в взаимно дополняющих режимах централизованного функционально-диагностического контроля, сквозного функционально-диагностического контроля по контрольным сигналам, местного и регламентного контроля, контроля в рабочем режиме.
Производится формирование и ввод контрольных сигналов идущих на передачу, прием через коммутационные и развязывающие устройства, аттенюаторы в различные сечения передающего, приемного, каналов, включая и контрольную антенну с имитацией комплексных отраженных сигналов.
Осуществляется автоматический сбор, обработка информации с комплексной оценкой функциональных, технических характеристик РЛС, составных частей в виде групп подсистем, подсистем, устройств, узлов с использованием двойственного набора параметров, являющихся диагностическими и (или) техническими, функциональными и перекрывающими информационное поле, характеризующее состояние РЛС в целом и составляющих ее подсистем, устройств с последовательными расширяющимися кольцами сквозных проверок подсистем, групп подсистем, устройств, каналов, трактов обработки информации, всей РЛС, поэтапным нарастающим комплексным контролем с совместным анализом обрабатываемой информации при работе РЛС на передачу, прием для различных этапов ее обработки, контролем обработки сигналов в промежуточных сечениях каналов прохождения информации, обеспечением нарастающих проверок сквозного информационного взаимодействия групп подсистем, устройств, узлов с локализацией, диагностированием отказавших подсистем, устройств, узлов.
Визуально отображаются отметки контрольных сигналов на подсистеме отображения информации для различных этапов, уровней их обработки, регистрацией, измерением в рабочем режиме на проходе сигналов с выходов подсистем, устройств и (или) совместным анализом входных и выходных сигналов подсистем, устройств в соответствии с коэффициентами передачи, алгоритмами работы,
Углубленно дополнительно проверяются, моделируются поведения подсистем, устройств РЛС в режимах их местного и (или) регламентного контроля путем формирования дополнительных тестовых сигналов имитации воздушной обстановки встроенными генераторами и (или) подсистемой формирования тренажерной и имитационной информации, или информационно-измерительным комплексом с анализом ответных реакций на подсистеме отображения информации или блоках индикации встроенных в подсистемы или в информационно-измерительном комплексе, переводом части измерений с высоких частот на более низкие с использованием децимации сигналов, стробоскопического эффекта, исходя из синхронной организации контроля, объединяющей соединение генерации тестовых воздействий, измерительных и обрабатывающих информацию средств.
Производится отображение сводной информации в виде древовидного графа с вершиной соответствующей обобщенному признаку состояния РЛС с последующим ветвлением на соответствующих сборках состояния составных частей, подсистем и входящих в них функционально законченных устройств, узлов.
Режим централизованного функционально-диагностического контроля в подсистемах, устройствах запускается с магистрального интерфейса управления через локальные диагностические ядра подсистем с предварительной самопроверкой локальных диагностических ядер, воспроизведением тестовых воздействий на входы контролируемых устройств, узлов, сжатием выходных реакций и (или) получением сигнатур с выходов, контрольных точек, например, методом сигнатурного анализа с сравнением полученных сигнатур с эталонными выбираемыми из постоянного запоминающего устройства или (и) сравнением выходных реакций с характерными информационными откликами и последующей выдачей через магистральный интерфейс управления сообщений о состоянии подсистем, функционально-законченных устройств, узлов, отдельных наборов составных частей, в данной подсистеме, устройстве и (или) их информационного взаимодействия на рабочее места оператора с подсистемой отображения информации.
В рабочем месте оператора с подсистемой отображения информации в режиме централизованного функционально-диагностического контроля производится формирование сводной информации о состоянии РЛС, подсистем, устройств, узлов и ее обобщение, отображение в виде древовидного графа с вершиной соответствующей обобщенному признаку состояния РЛС с последующим древовидным ветвлением на соответствующих сборках состояний подсистем, устройств, узлов.
В режиме сквозного функционально-диагностического контроля по контрольным сигналам в формирователе пилот-сигнала в трехкоординатном пространстве как отклики от целей в виде временных стробов задаются фиксированные воздушные объекты, независимо замешиваемые через контрольную антенну в приемо-передающую антенну и в приемное устройство с последующими их прохождением и стандартной обработкой в циркуляторе, приемном устройстве подсистеме формирования отметок целей и сопровождения траекторий, подсистеме надпорогового обнаружения и коммутации сигналов, воспроизведением их на подсистеме отображения информации с параметрами в виде контрольных формуляров целей в десятичной системе счисления и фиксацией их местоположения в системе координат зоны обзора РЛС, наклонная дальность, азимут, угол места воздушного объекта зашиваются в постоянное запоминающее устройство, опрашиваемое с формирователей текущих линейно-нарастающих кодов дальности, азимута угла места обзора пространства РЛС или азимут и угол места задаются с рабочего места оператора с подсистемой отображения информации в заданном секторе обзора.
Режимы местного контроля в подсистемах, устройствах задаются автономно оператором с самих подсистем по команде Контроль, передаваемой в соответствующее локальное диагностическое ядро, с формированием тестовых сигналов, фиксацией откликов контролируемых подсистем, устройств на заданные тестовые воздействия, сравнением их с эталонными и отображением результатов контроля на блоках индикации с табло, светодиодами, располагаемыми на лицевых панелях подсистем, устройств, конструктивно выполняемых соответственно в виде шкафов, стоек, блоков, ячеек.
Подсистема формирования тренажерной и имитационной информации воспроизводит как многофункциональный генератор имитационные тестовые сигналы воздушной обстановки в четырехкоординатном пространстве для дополнительного моделирования, контроля и диагностики подсистем надпорогового обнаружения и коммутации сигналов, формирования отметок целей и сопровождения траекторий, отображения информации.
В рабочем режиме осуществляется регистрация, измерение на проходе параметров сигналов с выходов подсистем, устройств и (или) производится совместный анализ входных и выходных сигналов подсистем, устройств в соответствии с коэффициентами передачи, алгоритмами работы и (или) взаимокорреляционными функциями с отображением результатов контроля на подсистеме отображения информации.
В режиме регламентного контроля осуществляется коммутация входов и выходов подсистем, устройств на соответствующие входы и выходы информационно-измерительного комплекса через коммутационные устройства, стандартные интерфейсы, производится углубленная дополнительная проверка, моделирование поведения подсистем, устройств путем синхронного формирования тестовых сигналов и регистрации, анализа ответных реакций исходя из концепции организации контроля, объединяющей генерацию тестовых воздействий, измерительных и обрабатывающих информацию средств в информационно-измерительном комплексе.
При контроле параметров сигналов передающего и приемного каналов на высоких частотах используются децимация сигналов и стробоскопический эффект, обеспечивающие более простое проведение измерений на низких частотах, при этом с помощью информационно-измерительного комплекса формируются очень короткие стробирующие импульсы, которые вырезают в исследуемом сигнале отдельные точки за определенное число периодов, позволяя контролировать параметры периодически повторяющихся сигналов, в том числе и сложных зондирующих сигналов РЛС.
При контроле подсистем, устройств производится сочетание измерения нескольких групп параметров, отражающих более полную информацию о состоянии составных частей, в частности, при контроле усилителей мощности производится измерение уровня мощности на входе и выходе устройства, температурных режимов внутри активных элементов.
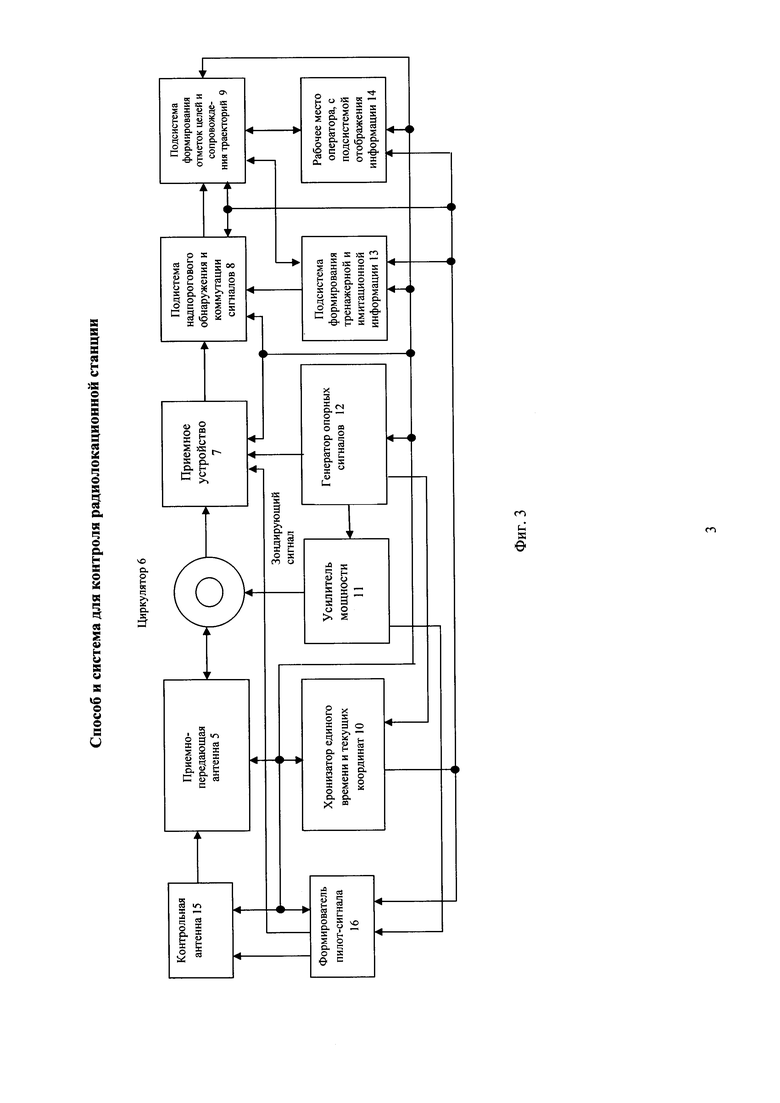
Предлагаемый способ контроля РЛС осуществляется в системе, иллюстрируемой чертежами на фиг. 3 - фиг. 7. Прототипом является система для контроля РЛС, представленная на фиг. 2. Способ и система для контроля РЛС (фиг. 3) содержит приемно-передающую антенну 5, циркулятор 6, приемное устройство 7, подсистему надпорогового обнаружения и коммутации сигналов 8, подсистему формирования отметок целей и сопровождения траекторий 9, хронизатор единого времени и текущих координат 10, усилитель мощности 11, генератор опорных сигналов 12, подсистему формирования тренажерной и имитационной информации 13, рабочее место оператора с подсистемой отображения информации 14. По сравнению с прототипом в систему введены контрольная антенна 15, формирователь пилот-сигнала 16. Система контроля обладает дополнительными функциональными возможностями в связи с использованием модификаций локальных диагностических ядер (фиг. 1), представленных на фиг. 4 - фиг. 7.
При этом система для контроля радиолокационной станции (РЛС) (фиг. 3), первый интерфейсный вход-выход приемно-передающей антенны 5 которой соединен через магистральный интерфейс управления с первыми интерфейсными входами- выходами подсистемы формирования тренажерной и имитационной информации 13, рабочего места оператора с подсистемой отображения информации 14, подсистемы формирования отметок целей и сопровождения траекторий 9, хронизатора единого времени и текущих координат 10, усилителя мощности 11, генератора опорных сигналов 12, подсистемы надпорогового обнаружения и коммутации сигналов 8, приемного устройства 7, второй информационный вход-выход приемно-передающей антенны 5 соединен с входом-выходом циркулятора 6, вход циркулятора соединен с выходом усилителя мощности 11, выход циркулятора соединен с первым информационным входом приемного устройства 7, второй вход которого соединен с первым выходом генератора опорных сигналов 12, выход приемного устройства 7 соединен с первым информационным входом подсистемы надпорогового обнаружения и коммутации сигналов 8, второй информационный вход подсистемы надпорогового обнаружения и коммутации сигналов соединен с выходом имитационных сигналов подсистемы формирования тренажерной и имитационной информации 13, а выход соединен с информационным входом подсистемы формирования отметок целей и сопровождения траекторий 9, второй и третий входы-выходы которой соединены соответственно со вторым интерфейсным входом-выходом подсистемы формирования тренажерной и имитационной информации 13 и вторым интерфейсным входом-выходом рабочего места оператора с подсистемой отображения информации 14, второй выход генератора опорных сигналов 12 соединен со входом усилителя мощности 11, третий выход соединен со входом хронизатора единого времени и текущих координат 10, выход которого соединен со входами подсистемы формирования тренажерной и имитационной информации 13, рабочего места оператора с подсистемой отображения информации 14, третьим входом подсистемы надпорогового обнаружения и коммутации сигналов 8, вторым входом подсистемы формирования отметок целей и сопровождения траекторий 9 отличается тем, что в систему введены контрольная антенна 15, формирователь пилот-сигнала 16, первый вход которого соединен со вторым выходом усилителя мощности 11, первый и второй выходы соединены соответственно с информационным входом контрольной антенны 15 и третьим входом тестового сигнала приемного устройства 7, выход контрольной антенны 15 соединен через воздушное пространство со входом приемо-передающей антенны 5, интерфейсные входы-выходы формирователя пилот-сигнала 16 и контрольной антенны 15 соединены с первым интерфейсным входом- выходом приемо-передающей антенны 5, выход хронизатора единого времени и текущих координат соединен со вторым входом формирователя пилот-сигнала 16.
Система контроля выполнена с использованием двойственного набора параметров, являющихся диагностическими, техническими и соответствующими информационному полю, характеризующему состояние РЛС в целом и составляющих ее подсистем, с последовательными расширяющимися кольцами сквозных проверок групп аналоговых и (или) цифровых подсистем, всей системы, хронизатор единого времени и текущих координат, усилитель мощности, приемное устройство, генератор опорных сигналов, подсистемы выполнены с возможностями самодиагностики с помощью встроенных локальных диагностических ядер, автономного перевода их в режим местного контроля, а рабочее место оператора с подсистемой отображения информации выполнено с возможностью реализации функций самодиагностики, центрального диагностического ядра, логической обработкой, обобщением, проведением последовательного совместного анализа информации со входов и выходов подсистем в соответствии с алгоритмами их работы в режимах контроля, так и в рабочем режиме.
Производится формирование, отображение сводной информации о состоянии РЛС в виде древовидного графа с вершиной соответствующей обобщенному признаку состояния РЛС с последующим ветвлением на соответствующих сборках состояния подсистем, хронизатора единого времени и текущих координат, усилителя мощности, приемного устройства, приемно-передающей антенны, циркулятора, генератора опорных сигналов и входящих в них функционально законченных узлов.
В подсистемах, устройствах режим централизованного контроля запускается с магистрального интерфейса управления через локальные диагностические ядра с предварительной самопроверкой локальных диагностических ядер и последующим воспроизведением тестовых воздействий на входы контролируемых устройств, узлов, сжатием выходных реакций и (или) получением сигнатур с выходов, контрольных точек, например, методом сигнатурного анализа с сравнением полученных сигнатур с эталонными выбираемых из ПЗУ, сравнением выходных реакций с характерными информационными откликами и последующей выдачей через магистральный интерфейс управления сообщений как о состоянии функционально-законченных устройств, узлов, так и сборки сообщений, информации об исправности набора составных частей в данных локальных диагностических ядрах и (или) их информационного взаимодействия.
На фиг. 4 приведен вариант подсистемы, части подсистемы или устройства для системы контроля РЛС (фиг. 3) с другим вариантом организации контроля и встроенного локального диагностического ядра, отличающийся от фиг. 1 тем, что управление режимами работы подсистемы, локального диагностического ядра производится через стандартный интерфейс и процессор сопряжения 17. Линия Интерфейс представляет собой управляющий вход-выход подсистемы (устройства), например, магистрального интерфейса управления. Набор контролируемых устройств, узлов имеет дополнительный выход на входной коммутатор для обеспечения возможности дополнительных промежуточных подключений некоторых выходов контролируемых узлов на вход локального диагностического ядра. Такое подключение обеспечивает контроль, проверку информационного взаимодействия между несколькими соединенными последовательно контролируемыми узлами. Перевод подсистемы (устройства) в режим местного контроля осуществляется с входа Контроль, расположенного в подсистеме. По запросу с центрального диагностического ядра осуществляется контроль и диагностика подсистемы и результаты контроля через процессор сопряжения 17 и интерфейс передаются в центральное диагностическое ядро.
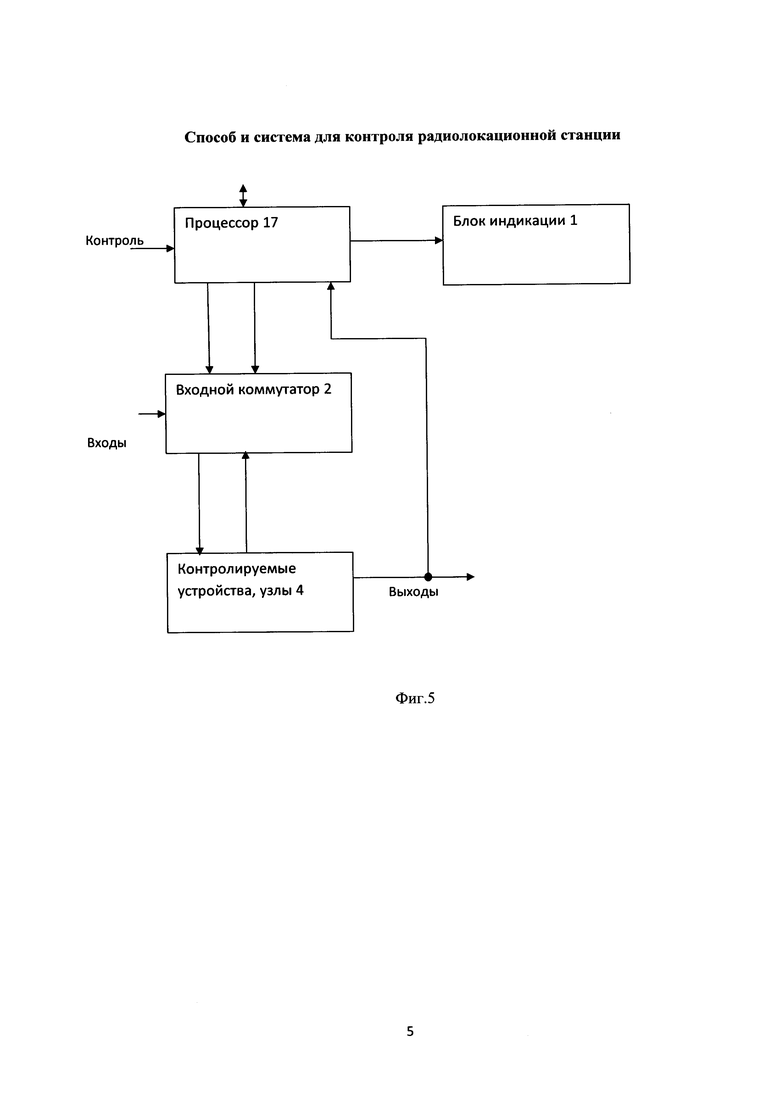
На фиг. 5 приведен вариант подсистемы отличающийся от фиг. 4 тем, что непосредственно процессор производит контроль функционально законченных узлов через стандартный интерфейс, то есть выполняет функции локального диагностического ядра. При этом коммутатор может отсутствовать (аналог приведен на рис. 1, стр. 55 в [1]).
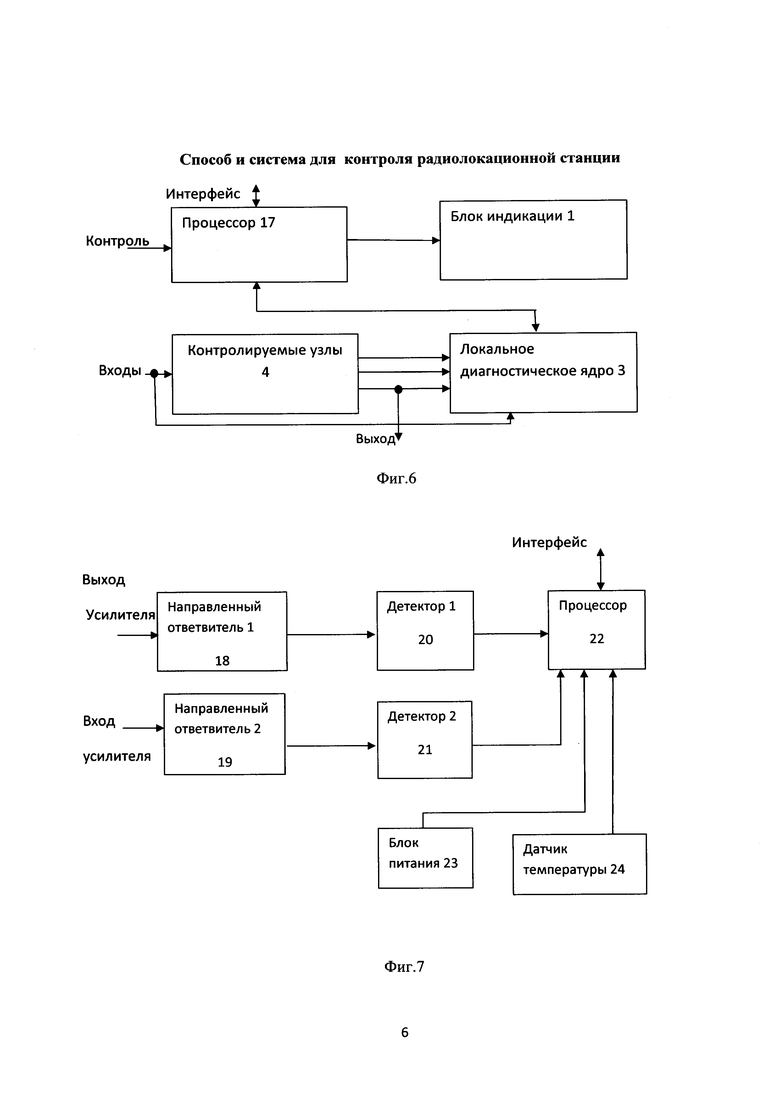
На фиг. 6, 7 приведены варианты подсистемы отличающиеся от фиг. 5 тем, что встроенное локальное диагностическое ядро представляет собой (фиг. 7) упрощенную встроенную измерительную систему (рис. 1, 2, стр. 39-40 из [5]). В данном случае процессор дополнительно включает в свой состав коммутатор, АЦП. Такое диагностическое ядро целесообразно использовать для контроля аналоговых параметров: уровня мощности на входе и выходе усилителя мощности 11 передатчика РЛС, температуры мощных активных (усилительных) элементов передатчика РЛС, напряжений источников питания, собственного шума приемного устройства 7 (фиг. 3). Для контроля уровней мощности на входе и выходе усилителя мощности передатчика 11 часть мощного сигнала передатчика через направленные ответвители, детекторы высокочастотных колебаний подается через коммутаторы на вход АЦП процессора, где и производится обработка контролируемых параметров. Непосредственное подключение входов и выходов контролируемых устройств к локальному диагностическому ядру (фиг. 6) обеспечивает возможность записывать на проходе в заданном временном интервале информацию с входов и выходов этих устройств в оперативную память. Таким образом, осуществляется контроль устройств и в рабочем режиме РЛС путем регистрации, измерения параметров сигналов с подсистем, устройств. И (или) производится совместный анализ входных и выходных сигналов подсистем, устройств в соответствии с коэффициентами передачи, алгоритмами работы и (или) взаимокорреляционными функциями с последующим отображением результатов контроля на рабочем месте оператора с подсистемой отображения информации 14.
При контроле, диагностике РЛС осуществляется автоматическая обработка информации с комплексной оценкой технических характеристик и диагностикой составных частей в виде наборов подсистем, функциональных устройств и узлов, использованием двойственного набора параметров, являющихся диагностическими, техническими и перекрывающих информационное поле, характеризующее состояние системы в целом и ее составляющих подсистем, с последовательными расширяющимися кольцами сквозных проверок групп аналоговых и (или) цифровых подсистем, всей системы путем вводов контрольных пилот-сигналов (ПС) идущих на передачу через аттенюаторы и высокочастотные коммутаторы в сечения приемного тракта, контрольную антенну с имитацией комплексных отраженных сигналов, поэтапным контролем, локализацией неисправностей в промежуточных сечениях прохождения ПС путем их комплексного совместного логического анализа при работе РЛС на прием с визуальным отображением отметок ПС на рабочем месте оператора с системой отображения информации, с помощью дополнительных контрольных устройств, устанавливаемых в различных сечениях приемных каналов и подсистем обработки информации, обеспечением нарастающих проверок сквозного информационного взаимодействия групп подсистем и с диагностированием, локализацией отказавших подсистем, функциональных устройств, узлов, углубленной дополнительной проверкой, моделированием поведения системы путем использования встроенной подсистемы имитации воздушной обстановки и тренировки операторов для генерации испытательных сигналов.
В подсистемах, устройствах режимы контроля и диагностики запускаются с управляющих входов-выходов (центральной магистрали) с предварительной самопроверкой локальных диагностических ядер и последующим воспроизведением тестовых воздействий на входы контролируемых узлов, устройств, сжатием выходных реакций и (или) получением сигнатур с выходов, контрольных точек, например, методом сигнатурного анализа с сравнением полученных сигнатур с эталонными выбираемых из ПЗУ, сравнением выходных реакций с характерными информационными откликами и последующей выдачей на центральную магистраль сообщений о состоянии как функционально-законченных устройств, узлов, их информационного взаимодействия, так и обобщенной сборки сообщений, информации об исправности подсистемы и набора ее составных частей.
В центральном диагностическом ядре производится формирование сводной информации о состоянии РЛС в виде древовидного графа с вершиной соответствующей обобщенному признаку состояния РЛС с последующим древовидным ветвлением на соответствующих сборках из отдельных подсистем, функциональных узлов и отображением соответствующей информации на подсистеме отображения информации рабочего места оператора.
В формирователе пилот- сигнала 16 (фиг. 3) в трехкоординатном пространстве на фиксированной наклонной дальности в виде временного строба постоянно задается воздушный объект как отклик от цели. Значения фиксированных азимута и угла места вводятся с рабочего места оператора с подсистемой отображения информации в неответственном секторе обзора воздушного пространства. ПС через контрольную антенну поступает как воздушная цель в приемо-передающую антенну и проходит весь тракт аналого-цифровой обработки с воспроизведением на подсистеме отображения с параметрами в виде контрольного формуляра цели с координатами азимут, наклонная дальность, высота или угол места. Результаты обработки поступают и в центральное диагностическое ядро, которое сравнивает измеренные, практические значения координат ПС: наклонная дальность Ди, углы азимута αи и места βи (или высоту определяют по наклонной дальности и углу места) с эталонными, действительными значениями координат. С этой целью вычисляются погрешности их измерения как
ΔД=ДР-Ди; Δα=αр-αи; Δβ=βр-βи;
где Др, αр, βР - расчетные, эталонные значения дальности, углов места и азимута. Для контроля используется факт превышения абсолютных значений погрешностей измерения координат выше значений, определяемых тактико-техническими характеристиками РЛС. В этом случае с высокой степенью достоверности уже можно контролировать значительную часть аппаратуры РЛС, по которой проходит и обрабатывается тестовый ПС. Для частичной локализации неисправностей приемо-передающей антенны, циркулятора, приемного устройства ПС раздельно подмешивается на вход приемопередающей антенны и на вход приемного устройства. Таким образом, с помощью дополнительных контрольных устройств, устанавливаемых в различных сечениях приемных каналов и подсистемам обработки, отображения информации, обеспечивается возможность проверить сквозное информационное взаимодействие большей части аппаратуры РЛС и с высоким разрешением диагностировать отказавшие подсистемы и устройства.
Подсистема формирования тренажерной и имитационной информации 13 дополнительно формирует как многофункциональный генератор имитационные тестовые сигналы сложной воздушной обстановки в четырех - координатном пространстве для дополнительного моделирования, контроля и диагностики подсистем надпорогового обнаружения и коммутации сигналов, формирования отметок целей и сопровождения траекторий и рабочего места оператора с подсистемой отображения информации 14 (фиг. 3).
Способ контроля обеспечивает определение технического состояния РЛС, подсистем, устройств в процессе эксплуатации. Система контроля представляет собой централизованную систему сбора, распределения и обработки информации с выводом результатов на экран подсистемы отображения информации. Система контроля обеспечивает управление взаимно дополняющими режимами централизованного функционально-диагностического контроля (ФДК), сквозного ФДК по контрольным сигналам, местного и регламентного контроля, контроля в рабочем режиме. Режимы контроля задаются с рабочего места оператора с подсистемой отображения информации 14.
Режим централизованного ФДК
Режим централизованного ФДК предназначен для определения технического состояния РЛС в процессе эксплуатации с отключением рабочего режима. Производится контроль составных частей РЛС в виде подсистем, устройств (фиг. 3), а также информационного обмена между ними. При начальном включении РЛС производится загрузка программного обеспечения в подсистемах, устройствах. В частности, в рабочем месте оператора с подсистемой отображения информации 14, подсистеме формирования отметок целей и сопровождения траекторий 9 программный диспетчер режимов контроля реализуется в находящихся в них ЭВМ. Таким образом, как и в прототипе или персональном компьютере контроль аппаратуры производится методом «расширяющегося ядра». В этом случае сначала проводится автономный тестовый контроль аппаратуры ЭВМ подсистем и т.д. Тестовый контроль и диагностика ЭВМ производится программным способом, путем проверки контрольных сумм, осуществления элементарных проверок, каждая из которых ориентирована на контроль определенных функций устройств вычислительных средств. По окончании проверки все активные устройства переводятся в режим контроля результатов путем сравнения результирующих кодов контроля с эталонными. При исправном устройстве, например, формируется признак «0», в случае неисправности признак «1». Сводные кодограммы о состоянии аппаратуры подсистем, устройств передаются в систему управления центральное диагностическое ядро, которое находится в рабочем месте оператора с подсистемой отображения информации 14. В рабочем режиме работоспособность устройств, входящих в вычислительные средства дополнительно контролируется по контрольным донесениям, квитанциям. Управление режимами контроля и сбор информации с систем осуществляется по каналам Ethernet, Link, RS, USB.
Для контроля составных частей РЛС совместно с центральной ЭВМ используется встроенная в эти системы резидентная аппаратура диагностирования, с помощью которой осуществляется генерация контрольных тестов, анализ (сжатие) выходных реакций с контрольных точек контролируемой подсистемы методом сигнатурного анализа или сравнения с эталонными сигналами с последующим сохранением полученных результатов контроля и диагностирование с глубиной диагностики до типовых элементов замены (фиг. 3). Информация от встроенной резидентной аппаратуры диагностирования каждой из подсистем, других составных частей РЛС передается в центральное диагностическое ядро (систему управления), где обобщается. Производится формирование и отображение сводной информации в виде древовидного графа с вершиной соответствующей обобщенному признаку состояния РЛС с последующим ветвлением на соответствующих сборках состояния составных частей, подсистем, устройств и входящих в них функционально законченных узлов.
Режим сквозного ФДК по контрольным сигналам
Контроль осуществляется и в рабочем режиме в ключевых сечениях приемопередающих трактов РЛС путем контроля стандартного прохождения контрольных пилот-сигналов. Например, контрольный сигнал соответствует зондирующему импульсу передатчика и формируется в виде имитируемой отметки цели.
В формирователе пилот-сигнала 16 в трехкоординатном пространстве как отклики от целей в виде временных стробов задаются фиксированные воздушные объекты, независимо периодически замешиваемые через контрольную антенну 15 в приемопередающую антенну 5 и в приемное устройство 7 с последующими их прохождением и стандартной обработкой в циркуляторе 6, приемном устройстве 7, подсистеме надпорогового обнаружения и коммутации сигналов 8, подсистеме формирования отметок целей и сопровождения траекторий 9, воспроизведением их на подсистеме отображения информации с параметрами в виде контрольных формуляров целей в десятичной системе счисления и фиксацией их местоположения в системе координат зоны обзора РЛС (фиг. 3).
Предусмотрен независимый ввод пилот-сигнала через аттенюаторы и высокочастотные коммутаторы и напрямую в сечения приемного тракта минуя контрольную антенну. Пилот -сигнал в соответствующих стадиях его обработки можно контролировать на выходах приемного устройства 7, подсистем надпорогового обнаружения и коммутации сигналов 8, формирования отметок целей и сопровождения траекторий 9, поскольку из центрального диагностического ядра можно через магистральный интерфейс управления записать в локальные диагностические ядра подсистем физические эталоны контрольного воздушного объекта для данных этапов обработки информации, сравнивать их с эталонными и делать вывод о состоянии подсистем, устройств. Таким образом, обеспечена дополнительная возможность поэтапного контроля прохождения и обработки контрольных сигналов в промежуточных сечениях при работе РЛС на прием с исключением приемо-передающей антенны 5 и циркулятора 6 (фиг. 3).
Предусмотрен и дополнительный контроль подсистем, устройств в рабочем режиме. С этой целью на определенных временных интервалах осуществляется одновременная регистрация, измерение на проходе параметров рабочих сигналов с входов, выходов подсистем, устройств и (или) производится совместный анализ входных и выходных сигналов подсистем, устройств в соответствии с действительными коэффициентами передачи, алгоритмами работы и (или) взаимокорреляционными функциями с отображением результатов контроля на подсистеме отображения информации.
Режимы местного и регламентного контроля
По результатам ранее рассмотренных видов контроля для уточнения характера неисправностей составные части РЛС- подсистемы, устройства переводятся в режимы местного (автономного) и регламентного контроля с помощью органов управления, которые находятся в этих составных частях РЛС. При встроенном местном контроле в локальное диагностическое ядро оператором подается команда Контроль (пример на фиг. 4) и производится автономное задание тестовых сигналов, фиксация откликов контролируемой аппаратуры, сравнение их с эталонными и отображение результатов контроля непосредственно на лицевых панелях блоков, шкафов подсистем на контрольных элементах отображения, светодиодах, представляющих из себя блоки индикации, таким образом, может быть осуществлен автономный углубленный поиск неисправностей в составных частях РЛС, подсистемах, устройствах.
В режиме регламентного контроля возможности встроенных средств контроля дополняет информационно-измерительный комплекс, построенный, например, на основе высокопроизводительной модульной платформы, предназначенной для создания автоматизированных измерительных и испытательных комплексов (компания National Instruments, стандарт PXI и т.д [8-10]. Линейка PXI имеет в своем составе набор модульных измерительных приборов, комплексируемых в информационно-измерительный комплекс. Программное обеспечение включает язык С++, среду разработки LabVIEW [10]. С помощью дополнительного коммутационного оборудования осуществляется коммутация входов и выходов подсистем, устройств на соответствующие входы, выходы информационно -измерительного комплекса, производится углубленная дополнительной проверка, моделирование поведения подсистем, устройств путем формирования тестовых сигналов с анализом ответных реакций исходя из концепции организации контроля, объединяющей генерацию тестовых воздействий, измерительных и обрабатывающих информацию средств в информационно-измерительном комплексе. В режиме регламентного контроля параметров сигналов приемного канала на высоких частотах используются децимация сигналов и стробоскопический эффект, обеспечивающие более простое проведение измерений на более низких частотах, при этом с помощью информационно-измерительного комплекса формируются очень короткие стробирующие импульсы, которые последовательно вырезают в исследуемом сигнале отдельные точки за определенное число периодов, позволяя контролировать параметры периодически повторяющихся сигналов в целом, в том числе и сложных зондирующих сигналов РЛС [7-10]. Система контроля обеспечивает определение технического состояния РЛС, ее составных частей и устройств в процессе эксплуатации и представляет собой централизованную систему сбора, распределения и обработки информации с выводом результатов в виде древовидного графа, текста на дисплей подсистемы отображения информации.
Система контроля обеспечивает эффективное обслуживание операторами РЛС в сложных полевых условиях, а также выполняет функции тренировки операторов. В случае отказа и неисправности минимизируется время, необходимое для поиска неисправных составных частей, устройств и устранения неисправностей. РЛС обеспечивает высокую надежность, автоматизацию управления и работу при наличии персонала сравнительно невысокой квалификации или в дальнейшем вообще при отсутствии обслуживающего персонала. Повышается коэффициент полноты проверки работоспособности:
 ,
,
где μk - суммарный параметр потока отказов составных частей изделия; μ0 - суммарный параметр потока отказов всех составных частей изделия. Увеличивается полнота проверки, характеризуемая коэффициентом глубины определения поиска места дефекта
 ,
,
где F - число однозначно различимых составных частей объекта на принятом уровне деления, с точностью до которых определяется место дефекта; R - общее число составных частей объекта, с точностью до которых требуется определить место дефекта (отказа). Повышается коэффициент технического использования
где Т0 - средняя наработка на отказ; τB - среднее время восстановления;
τTO - средняя продолжительность технического обслуживания. Коэффициент kТИ зависит от безотказности, восстанавливаемости и трудоемкости технического обслуживания.
Информационно-измерительный комплекс обеспечивает повышение производительности при регламентных работах. Обеспечивается практически автоматическое управление всеми измерительными приборами. Проведение измерений в автоматическом режиме исключает ошибки операторов, уменьшается время на проведение измерений, документирование их результатов, меньшему износу подвергаются кнопочные переключатели приборов.
Информационно-измерительный комплекс представляет собой виртуальную лабораторию схемотехнического моделирования и проектирования составных частей радиолокационных станций, построенную на базе модульных аппаратных средств фирмы National Instruments.
Литература
1. Сускин В.В., Дубов А.В., Капранов А.П. Обзор современных средств автоматизации поиска неисправностей в электронных устройствах. // .Приборы и системы Управление. Контроль. Диагностика. №2.2010. - С.54-59.
2. Чекушкин В.В. Встроенный автоматизированный контроль электронных систем // Приборы и системы управления. - 1999 - №7 - С. 42-45.
3. Юрин О.В., Чекушкин В.В, Дударев В.А.. Автоматизированная система управления радиолокационным комплексом // Приборы и системы Управление. Контроль. Диагностика. №5. 2003. - С. 14-19.,
4. Щербаков Н.С., Самхарадзе Т.Г., Рыбин В.М. Построение универсальной встроенной иерархической системы диагностирования сложных радиоэлектронных комплексов // Приборы и системы Управление. Контроль. Диагностика. №4. 2012. - С. 46-50.
5. Обходский А.В., Голобоков Ю.Н. Меркулов С.В. Система сбора и обработки данных с датчиков электромагнитной диагностики установки типа токамак //Приборы и системы. Управление. Контроль. Диагностика. 2012. №9. - С. 38-43.
6 Лепехина Т.А., Николаев В.И. Аппаратно-программное обеспечение стенда полунатурного моделирования для наземных испытаний космических радиолокаторов с синтезированной апертурой.// Радиотехника 2013. №1. - С. 53-57.
7. Антонов А.Ю. Регистрация и анализ поступающей в РЛС информации. Радиолокационная техника: устройства, станции. Системы РЛС-2015 Тезисы докладов третьей Всероссийской научно-практической конференции АО « МЗРИП»- Муром 2015. С 11-13.
8. Жиганов С.Н., Смирнов М.С., Романов Д.Н. Разработка стенда по оценке качества децимированного сигнала цифрового приемника на основе микросхемы 1288ХК1Т // XIII международная научно-практическая конференция «Инженерные приложения на базе технологий N1 - NIDays 2014»: сб. тез. докл. Москва, 19-20 ноября. 2014 г.
9. Жиганов С.Н., Смирнов М.С., Романов Д.Н. Исследование характеристик цифрового приемника радиолокационных сигналов на микросхеме 1288 ХК1Т // 17-я Международная конференция «Цифровая обработка сигналов и ее применение», 25-27 марта, 2015 г., Москва, Россия. - С. 377-380.
10. Жиганов С.Н., Омариев А.Н., Романов Д.Н. Разработка программно-аппаратного комплекса для проверки работоспособности АЦП в тракте цифрового приемника // III Всероссийская научно-практическая конференция «Радиолокационная техника: устройства, станции, системы РЛС'2015», 9-10 июня 2015 г., Муром. - С. 64-66.
11. Чекушкин В.В., Богатов Д.Д., Меркулов О. А.С. №1166121. Устройство для контроля цифровых узлов / Опубл. 1985, - Бюл. №25.
12. Антуфьев Р.В., Бобров М.С., Пискунов Г.Г., Царьков М.А. Построение тренажерно -моделирующего комплекса.// Вестник воздушно-космической обороны. №3..2014. - С. 5-8.
13. Антуфьев Р.В., Бобров М.С., Пискунов Г.Г., Чекушкин В.В., Царьков М.А., Пантелеев И.С.Способ и устройство имитации радиолокационной информации. Патент РФ №2489753 Опубл. 10.08.2013, - Бюл. №22.
14. Пяткин А.К. Семейство унифицированных многофункциональных цифровых обзорных РЛС ближнего радиуса действия // Радиотехника №10. 2010. - С. 49-64.
15. Терсин С.В. Разработка графического интерфейса оператора РЛС и практическая реализация отображения РЛИ // Вестник воздушно-космической обороны. 2014. Вып. 3. - С. 76-81.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ИНЖЕНЕРНОГО ОБЕСПЕЧЕНИЯ, АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ, СВЯЗИ И ЭЛЕКТРОПИТАНИЯ (КСИАС) | 2010 |
|
RU2445693C1 |
| Тренажер для подготовки боевых расчетов станции обнаружения целей | 2022 |
|
RU2783557C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС РЕГИСТРАЦИИ И СИНТЕЗА РАДИОТЕХНИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2351979C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2302698C2 |

Изобретение относится к электронной технике и может быть использовано для функционально-диагностического контроля радиолокационных станций (РЛС). Техническим результатом является осуществление контроля во взаимно дополняющих режимах централизованного функционально-диагностического контроля, сквозного функционально-диагностического контроля по контрольным сигналам, местного и регламентного контроля, контроля в рабочем режиме. Устройство содержит приемно-передающую антенну, циркулятор, приемное устройство, подсистему надпорогового обнаружения и коммутации сигналов, подсистему формирования отметок целей и сопровождения траекторий, хронизатор единого времени и текущих координат, усилитель мощности, генератор опорных сигналов, подсистему формирования тренажерной и имитационной информации, рабочее место оператора с подсистемой отображения информации, контрольную антенну, формирователь пилот-сигнала. 2 н. и 10 з.п. ф-лы, 7 ил.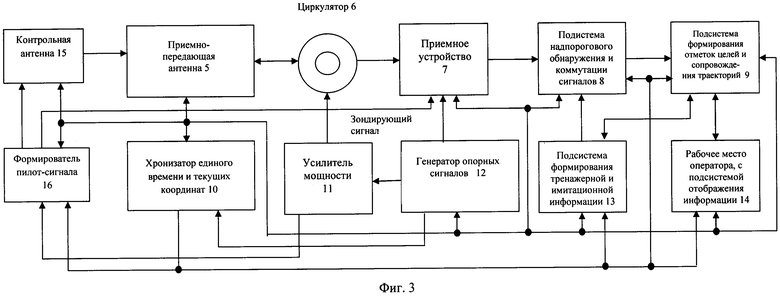
1. Способ контроля радиолокационной станции (РЛС) с использованием центрального и локальных диагностических ядер, встроенных в соответствующие контуры управления, заданием режимов работы и контроля с рабочего места оператора с подсистемой отображения информации, сбора, обработки информации с этих ядер через магистральный интерфейс управления, определением неисправных подсистем, устройств, узлов и отображением их состояния на подсистеме отображения информации, диагностированием отдельных контуров контроля на основе расширяющегося ядра с последовательным увеличением набора контролируемых устройств и(или) централизованного принципа с последовательно-параллельной процедурой, охватываемых контролем устройств, которые после их проверки сами становятся составляющими более многофункционального диагностического ядра, способного проверять другие устройства, отличающийся тем, что контроль осуществляется в взаимно дополняющих режимах централизованного функционально-диагностического контроля, сквозного функционально-диагностического контроля по контрольным сигналам, местного и регламентного контроля, контроля в рабочем режиме путем формирования и ввода контрольных сигналов, идущих на передачу, прием через коммутационные и развязывающие устройства, аттенюаторы в различные сечения передающего, приемного каналов, включая и контрольную антенну с имитацией комплексных отраженных сигналов, автоматического сбора, обработки информации с комплексной оценкой функциональных, технических характеристик РЛС, составных частей в виде групп подсистем, подсистем, устройств, узлов с использованием двойственного набора параметров, являющихся диагностическими и(или) техническими, функциональными и перекрывающими информационное поле, характеризующее состояние РЛС в целом и составляющих ее подсистем, устройств с последовательными расширяющимися кольцами сквозных проверок подсистем, групп подсистем, устройств, каналов, трактов обработки информации, всей РЛС, поэтапным нарастающим комплексным контролем с совместным анализом обрабатываемой информации при работе РЛС на передачу, прием для различных этапов ее обработки, контролем обработки сигналов в промежуточных сечениях каналов прохождения информации, обеспечением нарастающих проверок сквозного информационного взаимодействия групп подсистем, устройств, узлов с локализацией, диагностированием отказавших подсистем, устройств, узлов, визуальным отображением отметок контрольных сигналов на подсистеме отображения информации для различных этапов, уровней их обработки, регистрацией, измерением в рабочем режиме на проходе сигналов с выходов подсистем, устройств и(или) совместным анализом входных и выходных сигналов подсистем, устройств в соответствии с коэффициентами передачи, алгоритмами работы, углубленной дополнительной проверкой, моделированием поведения подсистем, устройств РЛС в режимах их местного и(или) регламентного контроля путем формирования дополнительных тестовых сигналов имитации воздушной обстановки встроенными генераторами и(или) подсистемой формирования тренажерной и имитационной информации, или информационно-измерительным комплексом с анализом ответных реакций на подсистеме отображения информации или блоках индикации встроенных в подсистемы или в информационно-измерительном комплексе, переводом части измерений с высоких частот на более низкие с использованием децимации сигналов, стробоскопического эффекта, исходя из синхронной организации контроля, объединяющей соединение генерации тестовых воздействий, измерительных и обрабатывающих информацию средств, отображением сводной информации в виде древовидного графа с вершиной, соответствующей обобщенному признаку состояния РЛС с последующим ветвлением на соответствующих сборках состояния составных частей, подсистем и входящих в них функционально законченных устройств, узлов.
2. Способ по п. 1, отличающийся тем, что режим централизованного функционально-диагностического контроля в подсистемах, устройствах запускается с магистрального интерфейса управления через локальные диагностические ядра подсистем с предварительной самопроверкой локальных диагностических ядер, воспроизведением тестовых воздействий на входы контролируемых устройств, узлов, сжатием выходных реакций и(или) получением сигнатур с выходов, контрольных точек, например, методом сигнатурного анализа с сравнением полученных сигнатур с эталонными выбираемыми из постоянного запоминающего устройства или (и) сравнением выходных реакций с характерными информационными откликами и последующей выдачей через магистральный интерфейс управления сообщений о состоянии подсистем, функционально законченных устройств, узлов, отдельных наборов составных частей, в данной подсистеме, устройстве и(или) их информационного взаимодействия на рабочее место оператора с подсистемой отображения информации.
3. Способ по п. 1, отличающийся тем, что в рабочем месте оператора с подсистемой отображения информации в режиме централизованного функционально-диагностического контроля производится формирование сводной информации о состоянии РЛС, подсистем, устройств, узлов и ее обобщение, отображение в виде древовидного графа с вершиной, соответствующей обобщенному признаку состояния РЛС с последующим древовидным ветвлением на соответствующих сборках состояний подсистем, устройств, узлов.
4. Способ по п. 1, отличающийся тем, что в режиме сквозного функционально-диагностического контроля по контрольным сигналам в формирователе пилот-сигнала в трехкоординатном пространстве как отклики от целей в виде временных стробов задаются фиксированные воздушные объекты, независимо замешиваемые через контрольную антенну в приемо-передающую антенну и в приемное устройство с последующими их прохождением и стандартной обработкой в циркуляторе, приемном устройстве, подсистеме формирования отметок целей и сопровождения траекторий, подсистеме надпорогового обнаружения и коммутации сигналов, воспроизведением их на подсистеме отображения информации с параметрами в виде контрольных формуляров целей в десятичной системе счисления и фиксацией их местоположения в системе координат зоны обзора РЛС, наклонная дальность, азимут, угол места воздушного объекта зашиваются в постоянное запоминающее устройство, опрашиваемое с формирователей текущих линейно-нарастающих кодов дальности, азимута, угла места обзора пространства РЛС или азимут и угол места задаются с рабочего места оператора с подсистемой отображения информации в заданном секторе обзора.
5. Способ по п. 1, отличающийся тем, что режимы местного контроля в подсистемах, устройствах задаются автономно оператором с самих подсистем по команде Контроль, передаваемой в соответствующее локальное диагностическое ядро, с формированием тестовых сигналов, фиксацией откликов контролируемых подсистем, устройств на заданные тестовые воздействия, сравнением их с эталонными и отображением результатов контроля на блоках индикации с табло, светодиодами, располагаемыми на лицевых панелях подсистем, устройств, конструктивно выполняемых соответственно в виде шкафов, стоек, блоков, ячеек.
6. Способ по п. 1, отличающийся тем, что подсистема формирования тренажерной и имитационной информации воспроизводит как многофункциональный генератор имитационные тестовые сигналы воздушной обстановки в четырехкоординатном пространстве для дополнительного моделирования, контроля и диагностики подсистем надпорогового обнаружения и коммутации сигналов, формирования отметок целей и сопровождения траекторий, отображения информации.
7. Способ по п. 1, отличающийся тем, что в рабочем режиме осуществляется регистрация, измерение на проходе параметров сигналов с выходов подсистем, устройств и(или) производится совместный анализ входных и выходных сигналов подсистем, устройств в соответствии с коэффициентами передачи, алгоритмами работы и(или) взаимокорреляционными функциями с отображением результатов контроля на подсистеме отображения информации.
8. Способ по п. 1, отличающийся тем, что в режиме регламентного контроля осуществляется коммутация входов и выходов подсистем, устройств на соответствующие входы и выходы информационно-измерительного комплекса через коммутационные устройства, стандартные интерфейсы, производится углубленная дополнительная проверка, моделирование поведения подсистем, устройств путем синхронного формирования тестовых сигналов и регистрации, анализа ответных реакций исходя из концепции организации контроля, объединяющей генерацию тестовых воздействий, измерительных и обрабатывающих информацию средств в информационно-измерительном комплексе.
9. Способ по п. 1, отличающийся тем, что в режиме регламентного контроля параметров сигналов приемного канала на высоких частотах используются децимация сигналов и стробоскопический эффект, обеспечивающие более простое проведение измерений на низких частотах, при этом с помощью информационно-измерительного комплекса формируются очень короткие стробирующие импульсы, которые вырезают в исследуемом сигнале отдельные точки за определенное число периодов, позволяя контролировать параметры периодически повторяющихся сигналов, в том числе и сложных зондирующих сигналов РЛС.
10. Способ по п. 1, отличающийся тем, что при контроле подсистем, устройств производится сочетание измерения нескольких групп параметров, отражающих более полную информацию о состоянии, в частности при контроле усилителей мощности производится измерение уровня мощности на входе и выходе устройства, температурных режимов внутри активных элементов.
11. Система для контроля радиолокационной станции (РЛС), первый интерфейсный вход-выход приемно-передающей антенны которой соединен через магистральный интерфейс управления с первыми интерфейсными входами-выходами подсистемы формирования тренажерной и имитационной информации, рабочего места оператора с подсистемой отображения информации, подсистемы формирования отметок целей и сопровождения траекторий, хронизатора единого времени и текущих координат, усилителя мощности, генератора опорных сигналов, подсистемы надпорогового обнаружения и коммутации сигналов, приемного устройства, второй информационный вход-выход приемно-передающей антенны соединен с входом-выходом циркулятора, вход циркулятора соединен с выходом усилителя мощности, выход циркулятора соединен с первым информационным входом приемного устройства, второй вход которого соединен с первым выходом генератора опорных сигналов, выход приемного устройства соединен с первым информационным входом подсистемы надпорогового обнаружения и коммутации сигналов, второй информационный вход подсистемы надпорогового обнаружения и коммутации сигналов соединен с выходом имитационных сигналов подсистемы формирования тренажерной и имитационной информации, а выход соединен с информационным входом подсистемы формирования отметок целей и сопровождения траекторий, второй и третий входы-выходы которой соединены соответственно со вторым интерфейсным входом-выходом подсистемы формирования тренажерной и имитационной информации и вторым интерфейсным входом-выходом рабочего места оператора с подсистемой отображения информации, второй выход генератора опорных сигналов соединен со входом усилителя мощности, третий выход соединен со входом хронизатора единого времени и текущих координат, выход которого соединен со входами подсистемы формирования тренажерной и имитационной информации, рабочего места оператора с подсистемой отображения информации, третьим входом подсистемы надпорогового обнаружения и коммутации сигналов, вторым входом подсистемы формирования отметок целей и сопровождения траекторий, отличающаяся тем, что в систему введены контрольная антенна, формирователь пилот-сигнала, первый вход которого соединен со вторым выходом усилителя мощности, первый и второй выходы соединены соответственно с информационным входом контрольной антенны и третьим входом тестового сигнала приемного устройства, выход контрольной антенны соединен через воздушное пространство со входом приемо-передающей антенны, интерфейсные входы-выходы формирователя пилот-сигнала и контрольной антенны соединены с первым интерфейсным входом-выходом приемо-передающей антенны, выход хронизатора единого времени и текущих координат соединен со вторым входом формирователя пилот-сигнала, система контроля выполнена с использованием двойственного набора параметров, являющихся диагностическими, техническими и соответствующими информационному полю, характеризующему состояние РЛС в целом и составляющих ее подсистем, с последовательными расширяющимися кольцами сквозных проверок групп аналоговых и(или) цифровых подсистем, всей системы, хронизатор единого времени и текущих координат, усилитель мощности, приемное устройство, генератор опорных сигналов, подсистемы выполнены с возможностями самодиагностики с помощью встроенных локальных диагностических ядер, автономного перевода их в режим местного контроля, а рабочее место оператора с подсистемой отображения информации выполнено с возможностью реализации функций самодиагностики, центрального диагностического ядра, логической обработкой, обобщением, проведением последовательного совместного анализа информации со входов и выходов подсистем, устройств в соответствии с алгоритмами их работы в режимах контроля, так и в рабочем режиме, формированием, отображением сводной информации о состоянии РЛС в виде древовидного графа с вершиной, соответствующей обобщенному признаку состояния РЛС с последующим ветвлением на соответствующих сборках состояния подсистем, хронизатора единого времени и текущих координат, усилителя мощности, приемного устройства, приемно-передающей антенны, циркулятора, генератора опорных сигналов и входящих в них функционально законченных узлов.
12. Система по п. 11, отличающаяся тем, что в подсистемах, устройствах режим централизованного контроля запускается с магистрального интерфейса управления через локальные диагностические ядра с предварительной самопроверкой локальных диагностических ядер и последующим воспроизведением тестовых воздействий на входы контролируемых устройств, узлов, сжатием выходных реакций и(или) получением сигнатур с выходов, контрольных точек, например, методом сигнатурного анализа с сравнением полученных сигнатур с эталонными выбираемых из ПЗУ, сравнением выходных реакций с характерными информационными откликами и последующей выдачей через магистральный интерфейс управления сообщений как о состоянии функционально законченных устройств, узлов, так и сборки сообщений, информации об исправности набора составных частей в данных локальных диагностических ядрах и(или) их информационного взаимодействия.
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
| УСТРОЙСТВО НАЗЕМНОГО КОНТРОЛЯ РАДИОЛОКАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ | 2000 |
|
RU2174238C1 |
| Устройство для контроля цифровых узлов | 1984 |
|
SU1166121A1 |
| JP 2008064560 A, 21.03.2008 | |||
| JPH 10246772 A, 14.09.1998. | |||

