Предлагаемое изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений, а именно для преобразования ограниченного угла поворота вала в цифровой код при управлении угловым положением подвижных частей объекта регулирования.
Неполнооборотные электромеханические индукционные линейные датчики угла (ИЛДУ) широко применяются в качестве датчиков обратной связи в следящих электроприводах оптико-электронных систем с ограниченным углом поворота вала. При переходе от аналоговых принципов построения механотронных систем слежения и регулирования к цифровым появилась необходимость создания и использования цифровых преобразователей угла в качестве датчиков обратной связи.
Известно устройство преобразования угла поворота ИЛДУ в постоянное напряжение (Микросхема AD698 фирмы Analog Devices, datasheet AD698, wvvrw.analog.com). Известное устройство содержит встроенный генератор синусоидального напряжения запитки первичной обмотки ИЛДУ, фазочувствительный выпрямитель выходного напряжения вторичной обмотки ИЛДУ, нормирующий делитель напряжения, фильтр нижних частот и выходной нормирующий операционный усилитель. Недостатком известного преобразователя угла поворота ИЛДУ в постоянное напряжение является необходимость дополнительного применения внешнего аналого-цифрового преобразователя для преобразования угла в цифровой код.
Наиболее близким к предлагаемому устройству является преобразователь угловых перемещений в цифровой код (патент РФ №2313764, МКИ G01B 7/30) с индуктивным трансформаторным ИЛДУ. Известное устройство содержит формирователь синусоиды, выход которого соединен с входом трансформаторного датчика угла, выход которого соединен с входом дифференциального усилителя, аналого-цифровой преобразователь, выход которого соединен с входом регистра данных, отличающееся тем, что в него введены блок управления и синхронизации и устройство выборки-хранения, выход которого соединен с первым входом аналого-цифрового преобразователя, первый вход соединен с выходом дифференциального усилителя, второй вход соединен с первым выходом блока управления и синхронизации, второй выход которого соединен со вторым входом аналого-цифрового преобразователя, третий выход соединен с входом формирователя синусоиды, а вход соединен с выходом генератора. Данное устройство выбрано в качестве прототипа.
Недостатком этого устройства является применение нестандартного трансформаторного ИЛДУ, сложность схемы преобразователя и недостаточная точность при изменении амплитуды формирователя синусоиды.
Целью изобретения является обеспечение работы с серийными ИЛДУ, упрощение схемы преобразователя и повышение точности измерения угла поворота.
Цель достигается за счет того, что в преобразователь, содержащий формирователь синусоиды, выход которого соединен с входом первичной обмотки индукционного линейного датчика угла, последовательно соединенные первый дифференциальный усилитель и первый аналого-цифровой преобразователь, причем выход линейного датчика угла соединен с входом первого дифференциального усилителя, блок управления и синхронизации и тактирующий генератор, выход которого соединен с блоком управления и синхронизации, отличающийся тем, что формирователь синусоиды содержит последовательно соединенные фильтр несущей частоты и усилитель мощности, и дополнительно введены последовательно соединенные второй дифференциальный усилитель и второй аналого-цифровой преобразователь, причем входы второго дифференциального усилителя соединены противофазно с выходом линейного датчика угла, последовательно соединенные цифровой сумматор с прямым и инверсным входами, цифровой фильтр низкой частоты, последовательный порт UART и драйвер интерфейса RS-485, причем входы цифрового сумматора соединены с выходами первого и второго аналого-цифрового преобразователей, а блок управления и синхронизации выполнен на микроконтроллере и содержит последовательно соединенные генератор опорной частоты и цифроаналоговый преобразователь, выход которого соединен с входом фильтра несущей частоты, третий аналого-цифровой преобразователь, вход которого соединен с выходом усилителя мощности формирователя амплитуды, а выход с управляющим входом цифроаналогового преобразователя.
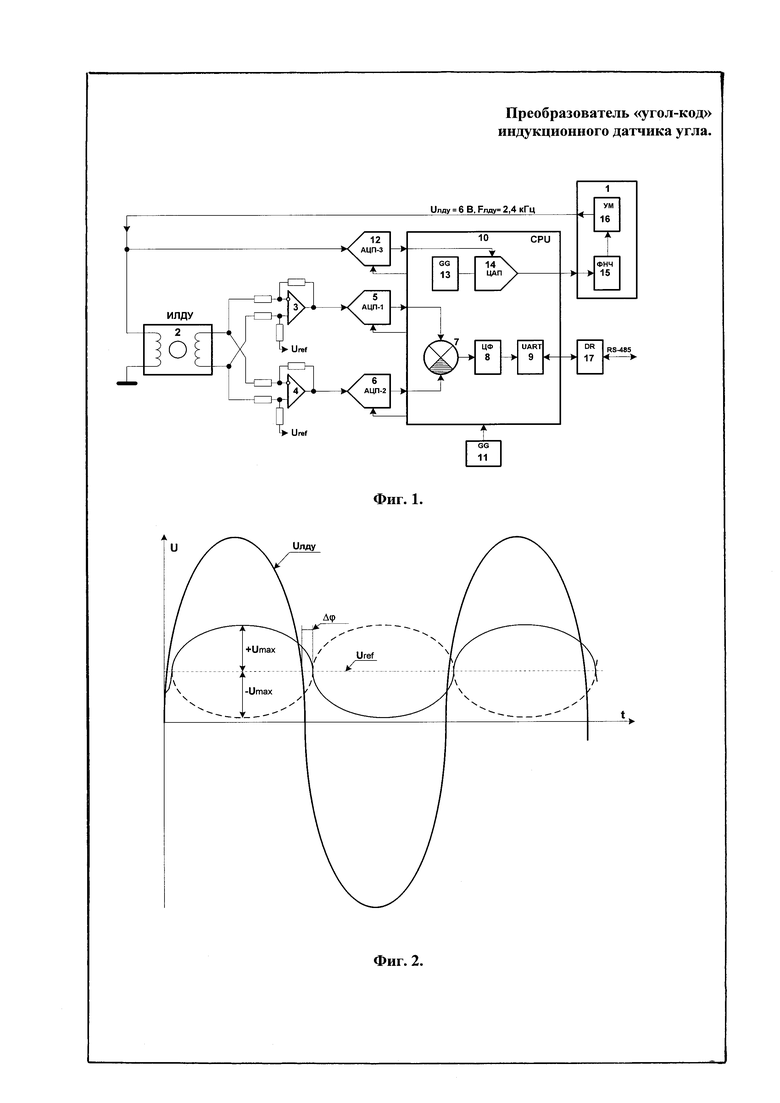
Суть изобретения поясняется чертежами, где на фиг. 1 изображена функциональная схема устройства, а на фиг. 2 - эпюры напряжения устройства преобразователя «угол-код» индукционного датчика угла.
Преобразователь «угол-код» содержит формирователь синусоиды 1, индукционный ИЛДУ 2, первый 4 и второй 4 дифференциальные усилители, первый 5 и второй 6 аналого-цифровые преобразователи (АЦП), цифровой сумматор 7, цифровой фильтр 8 низкой частоты (ЦФНЧ), последовательный канал обмена UART 9, блок управления и синхронизации 10, тактирующий генератор 11, третий АЦП 12, генератор опорной частоты 13, цифроаналоговый преобразователь 14 (ЦАП). Формирователь синусоиды содержит последовательно соединенные аналоговый фильтр несущей частоты 15 и усилитель мощности 16; выход формирователя синусоиды 1 соединен с входом ИЛДУ 2 и одновременно с входом третьего АЦП 12, выход которого соединен с управляющим входом ЦАП 14. Блок управления и синхронизации 10 выполнен на программируемом микроконтроллере, который реализует функции цифрового сумматора 7, цифрового ЦФНЧ 8, генератора опорной частоты 13 и ЦАП 14. Измеренное значение угла ИЛДУ выдается через встроенный канал UART 9 микроконтроллера и внешний драйвер 17 по стандартному цифровому интерфейсу RS-485.
Устройство работает следующим образом.
На первичную обмотку ИЛДУ 2 подается синусоидальное напряжение с выхода усилителя мощности 16 формирователя синусоиды 1, амплитуда и фаза выходного напряжения на вторичной обмотке определяется угловым положением ротора ИЛДУ. Выходное синусоидальное напряжение ИЛДУ 2 подается на входы первого 3 и второго 4 дифференциальных усилителей в противофазе. С выходов дифференциальных усилителей 3 и 4 напряжение поступает на входы первого 5 и второго 6 АЦП. На фиг. 2 показано входное напряжение Uлду на входе датчика 2 и напряжения +Umax и -Umax на входах первого 5 и второго 6 АЦП при максимальном угле поворота ротора ИЛДУ. Напряжения +Umax и -Umax имеют равные амплитуды относительно опорного напряжения U ref, равного половине динамического входного диапазона однополярного АЦП, и противоположны по знаку. С помощью блока управления и синхронизации 10 два раза за период синусоидального напряжения в момент его максимального значения происходит одновременный запуск двух АЦП и преобразование амплитуды в цифровой код, который хранится на выходе АЦП до очередного запуска. Значения цифровых кодов с выходов АЦП поступают на вход цифрового сумматора 7, который вычисляет сумму значений двух сигналов с учетом знака: повороту по часовой стрелке соответствует положительное значение угла, повороту против часовой стрелки - отрицательное значение. Цифровой ЦФНЧ 8 нижней частоты осуществляет усреднение четырех последних отсчетов с выхода сумматора 7, что обеспечивает снижение шумов преобразования. Вычисленное цифровое значение угла через последовательный цифровой канал UART 9 и драйвер 17 цифрового последовательного интерфейса RS-485 выдается на выход преобразователя «угол-код».
Частота формирователя синусоидального напряжения питания первичной обмотки ЛДУ задается цифровым генератором опорного напряжения 13 и через цифроаналоговый преобразователь 14 на аналоговый фильтр несущей частоты 15 формирователя синусоиды 1. Выходное напряжение ЦАП имеет квазисинусоидальную ступенчатую форму, определяемую частотой квантования и разрядностью ЦАП. Аналоговый фильтр 15 выделяет первую гармонику синусоидального напряжение несущей частоты, которое через усилитель мощности 16 поступает на первичную обмотку ИЛДУ 2 и одновременно на вход третьего АЦП 12, осуществляющего контроль амплитуды питания датчика ИЛДУ 2.
Точность преобразования напрямую зависит от стабильности амплитуды синусоидального напряжения питания ИЛДУ, которое может изменяться из-за температурных воздействий на аналоговые цепи формирователь синусоиды 1. Для обеспечения постоянного значения амплитуды синусоидального напряжения питания ИЛДУ 2 введена обратная связь с выхода третьего АЦП 11 на вход опорного напряжения ЦАП 15, что обеспечивает постоянство амплитуды.
В качестве блока управления и синхронизации в преобразователе «угол-код» используется микроконтроллер, например, 32-разрядный микроконтроллер семейства ARM Cortex-M3 со встроенными АЦП, ЦАП и каналами UART. В качестве дифференциальных усилителей может быть применен, например, сдвоенный операционный усилитель 544УД16У3 с масштабирующими прецизионными резисторами типа Р1-16П. В качестве АЦП могут применяться, например, встроенные АЦП микроконтроллера. Цифровой генератор опорного напряжения реализуется программным методом на микроконтроллере, в качестве цифроаналогового преобразователя может использоваться, например, встроенный ЦАП микроконтроллера. Аналоговый фильтр несущей частоты и усилитель мощности формирователя синусоиды могут быть выполнены, например, на сдвоенном операционном усилителе повышенной мощности типа 544УД18У3. В тактирующим генераторе микроконтроллера может быть применен, например, кварцевый резонатор типа РК463. Данное устройство может быть выполнено целиком на отечественной элементной базе без применения ЭРИ иностранного производства.
Данное устройство, предназначенное для работы с серийными индукционными ИЛДУ типа 15Д-32Б и 45Д-32Б1, изготовлено и испытано на опытных образцах, предполагается использовать это техническое решение на штатных изделиях. Датчики 15Д-32Б и 45 Д-32Б1 представляют собой индукционные электрические машины с неявнополюсным статором и безобмоточным явнополюсным ротором. Частота съема информации об угле обновляется с удвоенной частотой синусоидального напряжения питания первичной обмотки ИЛДУ.
Рабочий диапазон углов датчика 15Д-32Б составляет плюс/минус 6° (около 0,2 рад), цена младшего разряда преобразователя «угол-код» с данным датчиком составляет около 12'' (12 разрядов).
Рабочий диапазон углов датчика 45Д-32Б1 составляет плюс/минус 30° (около 1,0 рад), цена младшего разряда преобразователя «угол-код» с данным датчиком составляет около 53'' (12 разрядов).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла положения и линейного перемещения контролируемого объекта | 2021 |
|
RU2780031C1 |
| Контроллер магнитного поля | 2023 |
|
RU2799103C1 |
| Устройство для контроля динамических параметров аналого-цифровых преобразователей | 1987 |
|
SU1474839A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| ТРАССОПОИСКОВЫЙ ПРИЕМНИК | 2011 |
|
RU2482517C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2313764C1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2018 |
|
RU2686519C1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367903C1 |
Предлагаемое изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений, а именно для преобразования ограниченного угла поворота вала в цифровой код при управлении угловым положением подвижных частей объекта регулирования. Преобразователь «угол-код» индукционного линейного датчика угла (ИЛДУ) содержит формирователь синусоиды, выход ИЛДУ через два противофазно включенных дифференциальных усилителя соединен с входами первого и второго АЦП. Блок управления и синхронизации выполнен на микроконтроллере, содержащем встроенные АЦП, ЦАП и последовательный канал UART. Цифровой сумматор, фильтр низкой частоты и генератор опорной частоты выполнены программным методом на микроконтроллере. Формирователь синусоиды содержит аналоговый фильтр несущей частоты и усилитель мощности. Цифровой выходной сигнал преобразователя «угол-код» с выхода UART микроконтроллера выдается по последовательному каналу RS-485. Обеспечена работа с серийными индуктивными ИЛДУ, например, типа 15Д-32Б и 45Д-32Б1, достигнуто упрощение схемы преобразователя и повышение точности измерения угла поворота. При использовании индукционного датчика угла типа-15Д-32Б рабочий диапазон углов составляет плюс/минус 6°, цена младшего разряда преобразователя «угол-код» составляет около 12'' (12 разрядов). Техническим результатом заявленного изобретения является обеспечение работы с серийными индуктивными ИЛДУ, упрощение схемы преобразователя и повышение точности измерения угла поворота. 2 ил.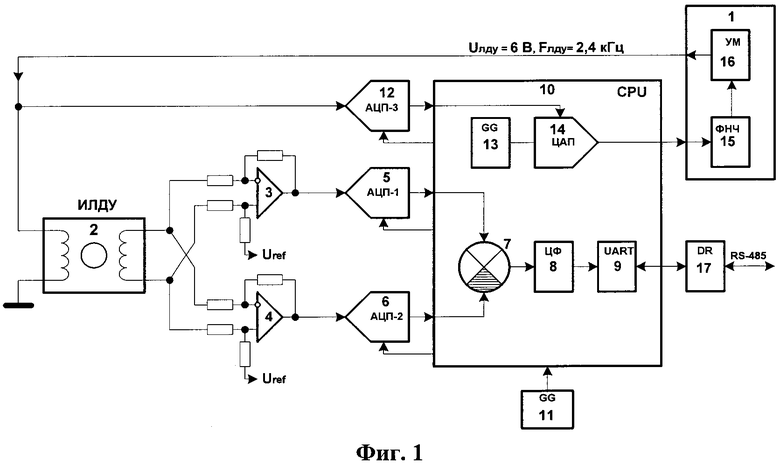
Преобразователь «угол-код» индукционного датчика угла, содержащий формирователь синусоиды, выход которого соединен с входом первичной обмотки индукционного линейного датчика угла, последовательно соединенные первый дифференциальный усилитель и первый аналого-цифровой преобразователь, причем выход линейного датчика угла соединен с входом первого дифференциального усилителя, блок управления и синхронизации и тактирующий генератор, выход которого соединен с блоком управления и синхронизации, отличающийся тем, что формирователь синусоиды содержит последовательно соединенные фильтр несущей частоты и усилитель мощности, дополнительно введены последовательно соединенные второй дифференциальный усилитель и второй аналого-цифровой преобразователь, причем входы второго дифференциального усилителя соединены противофазно с выходом линейного датчика угла, последовательно соединенные цифровой сумматор с прямым и инверсным входами, цифровой фильтр низкой частоты, последовательный порт UART и драйвер интерфейса RS-485, причем входы цифрового сумматора соединены с выходами первого и второго аналого-цифрового преобразователей, а блок управления и синхронизации выполнен на микроконтроллере и содержит последовательно соединенные генератор опорной частоты и цифроаналоговый преобразователь, выход которого соединен с входом фильтра несущей частоты, третий аналого-цифровой преобразователь, вход которого соединен с выходом усилителя мощности формирователя амплитуды, а выход с управляющим входом цифроаналогового преобразователя.
| Статья: "Микросхема преобразователя угол-код для индуктивных датчиков", Журнал "Современная электроника номер 3, 2015 | |||
| Статья: "КОМПЬЮТЕРНЫЙ ПРЕОБРАЗОВАТЕЛЬ "УГОЛ-КОД" НА СЕЛЬСИНЕ", Труды Нижегородского государственного технического университета им | |||
| Р.Е | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| WO 1996041120 A1, 19.12.1996. | |||

