Изобретение относится к области измерительной техники и предназначено для измерения угловых и линейных перемещений контролируемого объекта с помощью датчиков на основе потенциометра. Устройство может найти применение для измерения угла положения и линейных перемещений подвижных элементов летательных аппаратов, транспортных объектов, кораблей и др.
Известно устройство для измерения угловых перемещений из патента РФ №2386923 с датой приоритета 20.10.2008, содержащее генератор, выход которого соединен с входом блока управления и синхронизации, первый выход которого соединен с входом формирователя синусоиды, выход которого соединен с входом трансформаторного датчика угла, первый и второй выходы которого соединены соответственно с первым и вторым входами дифференциального усилителя, выход которого соединен с первым входом устройства выборки-хранения, выход которого соединен с первым входом аналого-цифрового преобразователя. Причем в устройство для измерения угловых перемещений введены сумматор и четыре регистра, первые входы которых соединены с выходом аналого-цифрового преобразователя, а выход первого регистра соединен с первым входом сумматора, выход второго регистра соединен со вторым входом сумматора, выход третьего регистра соединен с третьим входом сумматора, выход четвертого регистра соединен с четвертым входом сумматора, выход которого соединен с первым входом регистра данных, второй вход которого соединен с шестым выходом блока управления и синхронизации, пятый выход которого соединен с пятым входом сумматора, четвертый выход соединен со вторыми входами четырех регистров, третий выход соединен со вторым входом аналого-цифрового преобразователя, а второй выход соединен со вторым входом устройства выборки-хранения.
Недостатками известного устройства для измерения угловых перемещений являются сложность схемы, обусловленная необходимостью формирования синусоидального сигнала для трансформаторного датчика угла, а также низкие надежность и достоверность измерений, связанные с отсутствием резервирования в каналах формирования сигнала датчика и измерений.
Известен преобразователь «Угол-Код» индукционного датчика угла из патента РФ №2649033, содержащий формирователь синусоиды, выход которого соединен с входом первичной обмотки индукционного линейного датчика угла, последовательно соединенные первый дифференциальный усилитель и первый аналого-цифровой преобразователь. Причем выход линейного датчика угла соединен с входом первого дифференциального усилителя, блок управления и синхронизации и тактирующий генератор, выход которого соединен с блоком управления и синхронизации. Формирователь синусоиды содержит последовательно соединенные фильтр несущей частоты и усилитель мощности. Дополнительно введены последовательно соединенные второй дифференциальный усилитель и второй аналого-цифровой преобразователь, причем входы второго дифференциального усилителя соединены противофазно с выходом линейного датчика угла, последовательно соединенные цифровой сумматор с прямым и инверсным входами, цифровой фильтр низкой частоты, последовательный порт UART и драйвер интерфейса RS-485. Причем входы цифрового сумматора соединены с выходами первого и второго аналого-цифрового преобразователей, а блок управления и синхронизации выполнен на микроконтроллере и содержит последовательно соединенные генератор опорной частоты и цифроаналоговый преобразователь, выход которого соединен с входом фильтра несущей частоты, третий аналого-цифровой преобразователь, вход которого соединен с выходом усилителя мощности формирователя амплитуды, а выход с управляющим входом цифроаналогового преобразователя.
Недостатком известного преобразователя «Угол-Код» индукционного датчика угла является сложность схемы, обусловленная необходимостью формирования опорного сигнала из-за применения индукционного датчика угла. Также недостатками данного преобразователя являются сниженные надежность и достоверность измерений из-за отсутствия резервирования канала формирования опорного сигнала и канала измерения.
Известен датчик угла поворота из патента РФ №152876 с датой приоритета 27.01.2015 (прототип), содержащий преобразователь угловых перемещений в электрический информационный сигнал, выполненный в виде абсолютного углового магнитного энкодера, питающую сеть, автономный источник питания, супервизор, первый вход которого подключен к питающей сети, и коммутатор, рабочие входы которого подключены к питающей сети и выходу автономного источника питания. Датчик угла поворота снабжен микроконтроллером с запоминающим устройством и блоком операционных усилителей с низкоомными выходами. При этом магнитный энкодер выполнен на основе туннельного магниторезистивного эффекта, а микроконтроллер - с возможностью перехода в режим микропотребления при снижении значения напряжения питающей сети ниже допустимого значения. Входы питания микроконтроллера, блока операционных усилителей и второй вход супервизора подключены к выходу коммутатора, а вход питания магнитного энкодера - к питающему выходу микроконтроллера. Информационные выходы магнитного энкодера подключены к соответствующим входам блока операционных усилителей, информационные входы микроконтроллера подключены к низкоомным выходам блока операционных усилителей, управляющий вход - к сигнальному выходу супервизора, а выход - к линии связи датчика с регистрирующим прибором непосредственно или через согласующее устройство.
Недостатком данной схемы являются ограниченные функциональные возможности устройства из-за отсутствия контроля изменения положения объекта при отключенном питании, что обусловлено применением магнитного энкодера. Также в данной схеме снижена достоверность полученных результатов измерения из-за отсутствия резервного канала измерения.
Технической проблемой является создание устройства для измерения угла положения и линейного перемещения контролируемого объекта с повышенными надежностью и достоверностью результатов измерений.
Технические результаты заявляемого изобретения заключаются в повышении надежности формирования стабилизированных напряжений для питания потенциометрического датчика и увеличении достоверности результатов измерений.
Для достижения указанных технических результатов заявляемое устройство для измерения угла положения и линейного перемещения контролируемого объекта содержит два идентичных, соединенных параллельно между собой канала, основной и резервный, в которых производится формирование стабилизированных напряжений для питания потенциометрического датчика и измерение сигнала, пропорционального угловому положению или линейному перемещению контролируемого объекта. Основной и резервный каналы идентичны по своей структуре и содержат источник опорного напряжения, к выходу которого подключены вход микросхемы контроллера идеального диода и исток полевого транзистора. Сток полевого транзистора подключен к выходу микросхемы контроллера идеального диода. Выходы основного и резервного каналов подключены к одному из крайних выводов потенциометрического датчика. Затворы полевых транзисторов подключены к выводу микросхемы контроллера идеального диода, который формирует напряжение управления затвором. Средний вывод потенциометрического датчика подключен ко входам аналого-цифровых преобразователей (далее - АЦП), встроенных в микроконтроллеры соответствующих каналов - основного и резервного.
Описание осуществления изобретения может быть использовано в качестве примера для лучшего понимания его сущности и изложено со ссылками на фигуру, приложенную к настоящему описанию. При этом приведенные ниже подробности призваны не ограничить сущность изобретения, а сделать ее более ясной.
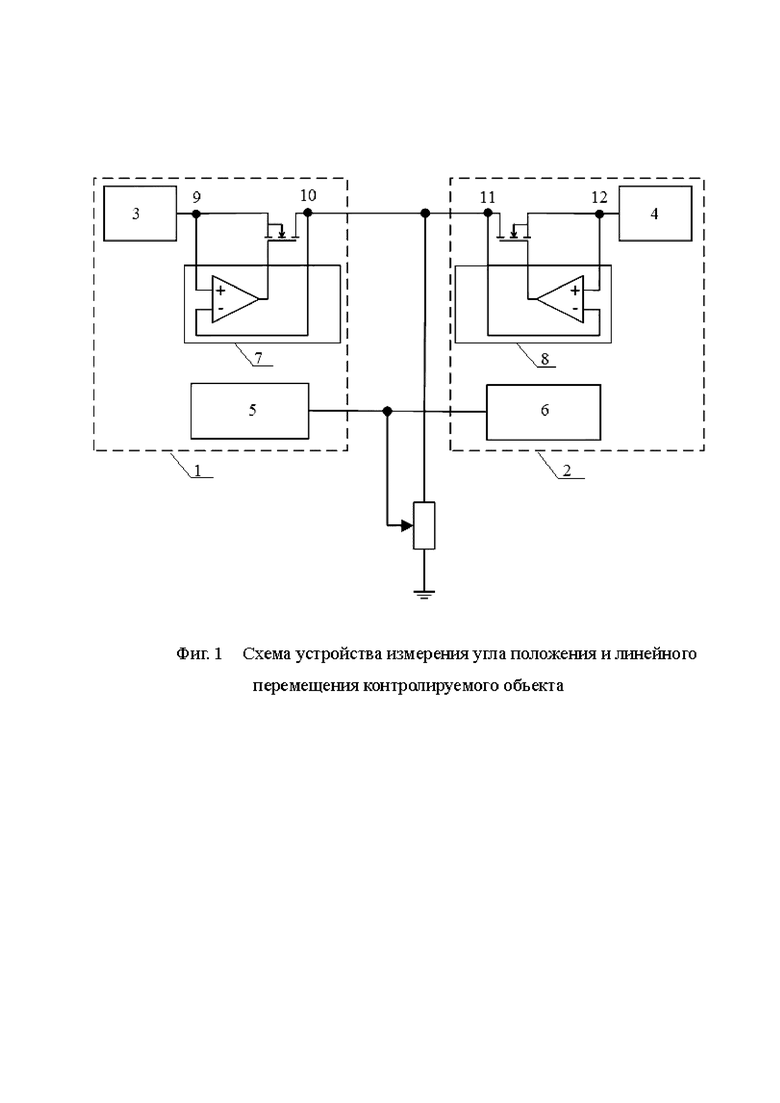
На фиг. 1 представлена схема устройства измерения угла положения и линейного перемещения контролируемого объекта, где:
1 - основной канал;
2 - резервный канал;
3 - источник опорного напряжения основного канала;
4 - источник опорного напряжения резервного канала;
5 - микроконтроллер основного канала;
6 - микроконтроллер резервного канала;
7 - микросхема контроллера идеального диода основного канала;
8 - микросхема контроллера идеального диода резервного канала;
9 - вход микросхемы контроллера идеального диода основного канала;
10 - выход микросхемы контроллера идеального диода основного канала;
11 - выход микросхемы контроллера идеального диода резервного канала;
12 - вход микросхемы контроллера идеального диода резервного канала.
При измерении используется связь между контролируемым объектом и подвижным контактом потенциометрического датчика. Величина измеряемого напряжения на датчике связана с физическим положением объекта.
На схеме устройства измерения угла положения и линейного перемещения контролируемого объекта питание потенциометра осуществляется от двух независимых источников опорного напряжения. Каждый из этих двух источников формирует стабилизированное постоянное напряжение питания для потенциометра. Эти источники подключаются к нагрузке параллельно через схемы «идеальных диодов» с малым падением напряжения и односторонней проводимостью. Данная схема «идеального диода» состоит из полевого транзистора с малым сопротивлением открытого канала и микросхемы контроллера идеального диода, управляющей этим транзистором. Микросхема контроллера идеального диода выполняет следующие функции:
- сравнение напряжений на выводах полевого транзистора с помощью встроенного компаратора;
- формирование напряжения управления затвором транзистора.
Если напряжение питания потенциометра, т.е. напряжение на выходе микросхемы контроллера идеального диода, больше чем напряжение, формируемое источником опорного напряжения, т.е. напряжение на входе микросхемы контроллера идеального диода, то микросхема контроллера идеального диода формирует напряжение на затворе транзистора, которое переводит его в закрытое состояние. И, наоборот, если напряжение питания потенциометра меньше чем напряжение опорного источника, то микросхема контроллера открывает транзистор. Таким образом, данная схема в составе контроллера идеального диода и полевого транзистора, работает как диод с малым падением напряжения. Применение данных схем осуществляет резервирование питания потенциометрического датчика. При отказе любого из двух источников формирования опорного напряжения или снижении напряжения на его выходе, питание потенциометрического датчика будет осуществляться от другого источника опорного напряжения.
Измерение напряжения на подвижном контакте потенциометрического датчика осуществляется двумя независимыми каналами измерения, что позволяет не потерять данные при отказе одного из каналов измерения, а также повысить достоверность этих измерений. Данное напряжение измеряется и преобразуется в цифровую форму с помощью АЦП, встроенных в микроконтроллеры.
В качестве источников опорного напряжения могут использоваться микросхемы REF195ES, LTC6655CHMS8, в качестве схем контроллеров идеального диода микросхемы LTC4359HMC8, LM74700QDB, полевых транзисторов - IRLML6344, FDMS8018. В схеме измерения можно использовать микроконтроллеры со встроенными аналого-цифровыми преобразователями - STM32F437, STM32F746.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ввода команд для системы управления подруливающим устройством | 2023 |
|
RU2802096C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2023 |
|
RU2796191C1 |
| Устройство ввода команд для системы управления винторулевой колонкой судна | 2023 |
|
RU2800615C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА АЗИМУТА ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2344370C1 |
| СПОСОБ УПРАВЛЕНИЯ УРОВНЕМ СВЕТООТДАЧИ СВЕТОДИОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2619601C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНОГО ИЛИ УГЛОВОГО ПЕРЕМЕЩЕНИЯ ОБОРУДОВАНИЯ ИЛИ МЕХАНИЗМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2009 |
|
RU2403204C1 |
| Сигнализатор газа | 2024 |
|
RU2829007C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| ТЕРМОМЕТРИЧЕСКАЯ КОСА И СПОСОБ ЕЕ КАЛИБРОВКИ | 2008 |
|
RU2389984C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
Изобретение относится к области измерительной техники и может найти применение для измерения угла положения и линейных перемещений подвижных элементов летательных аппаратов, транспортных объектов и кораблей. Технический результат - повышение надежности формирования стабилизированных напряжений для питания потенциометрического датчика и увеличение достоверности результатов измерений. Устройство содержит два идентичных соединенных параллельно между собой канала, основной и резервный, в которых производится формирование стабилизированных напряжений для питания потенциометрического датчика и измерение сигнала, пропорционального угловому положению и линейному перемещению контролируемого объекта. Основной и резервный каналы идентичны по своей структуре и содержат источник опорного напряжения, к выходу которого подключены вход микросхемы контроллера идеального диода и исток полевого транзистора. Выходы основного и резервного каналов подключены к одному из крайних выводов потенциометрического датчика. Затворы полевых транзисторов подключены к выводу микросхемы контроллера идеального диода, который формирует напряжение управления затвором. Средний вывод потенциометрического датчика подключен ко входам АЦП, встроенных в микроконтроллеры соответствующих каналов - основного и резервного. 1 ил.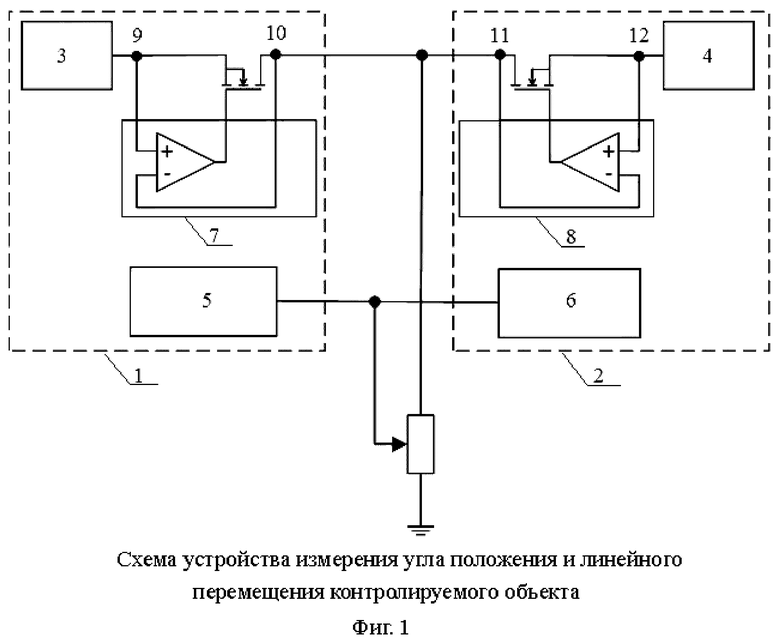
Устройство для измерения угла положения и линейного перемещения контролируемого объекта, отличающееся тем, что содержит два идентичных соединенных параллельно между собой канала, основной и резервный, в которых производится формирование стабилизированных напряжений для питания потенциометрического датчика и измерение сигнала, пропорционального угловому положению и линейному перемещению контролируемого объекта; основной и резервный каналы идентичны по своей структуре, каждый из них содержит источник опорного напряжения, к выходу которого подключены вход микросхемы контроллера идеального диода и исток полевого транзистора; сток полевого транзистора подключен к выходу микросхемы контроллера идеального диода; выходы основного и резервного каналов подключены к одному из крайних выводов потенциометрического датчика; затворы полевых транзисторов подключены к выводу микросхемы контроллера идеального диода, который формирует напряжение управления затвором; средний вывод потенциометрического датчика подключен ко входам аналого-цифровых преобразователей, встроенных в микроконтроллеры соответствующих каналов – основного и резервного.
| Электрический выключатель | 1928 |
|
SU12529A1 |
| Устройство для измерения перемещений | 1980 |
|
SU911133A1 |
| Способ преобразования перемещения в длительность импульсов и устройство для его осуществления (его варианты) | 1984 |
|
SU1227939A1 |
| Емкостно-электронное устройство для преобразования перемещения | 1985 |
|
SU1392338A1 |
| DE 4339931 C1, 30.03.1995 | |||
| GB 8330145 D0, 21.12.1983. | |||

