Малогабаритное универсальное подводное гидроакустическое устройство - это комплекс совмещенных приборов;
- гидроакустической станции звукоподводной связи, реализующий также функцию пассивного пеленгатора, и активного гидролокатора, которое предназначено стать частью экипировки водолазов и дайверов.
Оно предназначено для использования специалистами-водолазами при проведении гидротехнических работ, обнаружении затонувших объектов, подводных препятствий, гидроакустической речевой (аналоговой) и специализированной цифровой связи, а также навигации в морских и речных акваториях.
В настоящее время типичная техническая реализация - отдельно устройство звукоподводной связи и отдельно активный пеленгатор, не комплексированные в единый прибор. Заявка на предлагаемое изобретение «Малогабаритное универсальное подводное гидроакустическое устройство» рассматривает возможность на приоритет в части конструирования двух узлов;
- гидроакустической антенны и связанного с ее применением видеоиндикатора, особенно в части нового применения прибора в режиме эхолокации.
Первые предназначены для связи между водолазами и судном, обеспечивающим подводные работы. Они устанавливаются на водолазном снаряжении.
Гидролокаторы, как правило, приборы «ручные», не входят в водолазное снаряжение.
Это объясняется двумя факторами:
- даже при существующих возможностях создания малогабаритной электронной аппаратуры совмещение двух приборов в одном представляет существенные трудности для размещения на водолазах, в особенности из-за отсутствия подходящих гидроакустических антенн;
- специализированные «ручные» гидролокаторы из-за возможных больших габаритов позволяют реализовать большую дальность обнаружения объектов, хотя в ряде случаев их совместное использование с приборами звукоподводной связи весьма целесообразно.
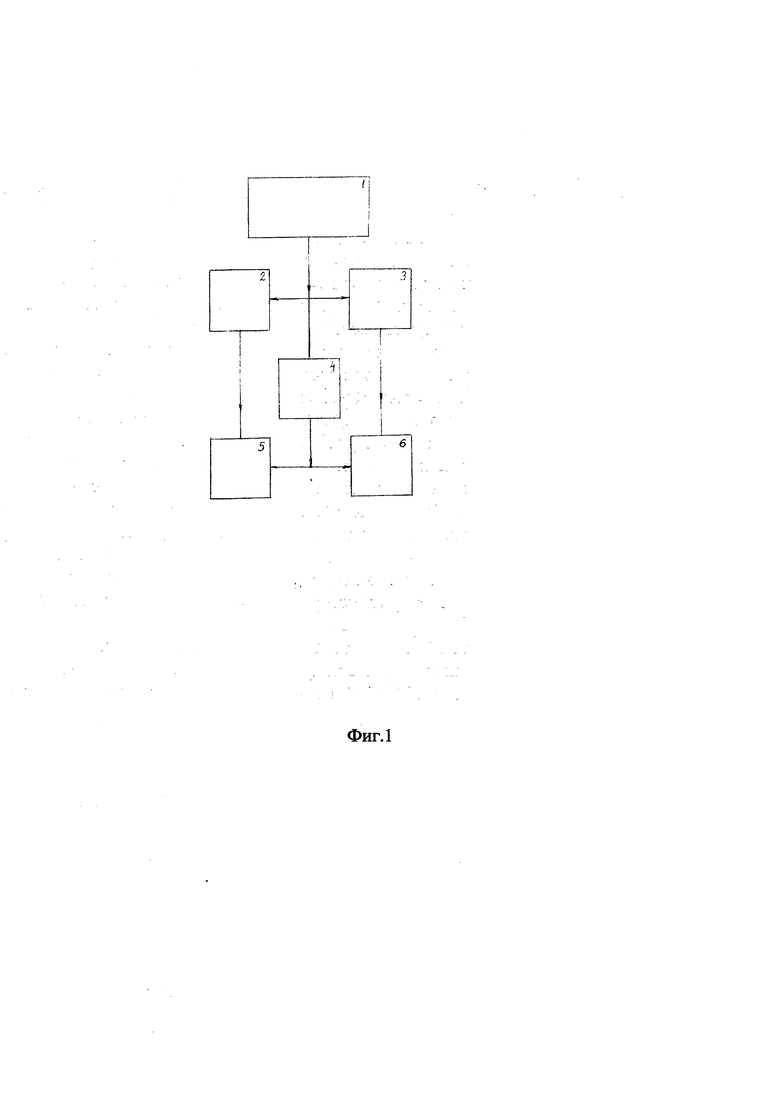
На фигуре 1 схематически изображена структура универсального гидроакустического устройства.
В него включены:
- гидроакустическая антенна (1) («Первый прибор»)
- радиотехнические узлы (или тракты), охватывающие практически все возможные режимы работы универсального устройства. Эта аппаратура звукоподводной связи обнаруживает и пеленгует гидроакустические сигналы в режиме ОГС (2), гидролокатора (3), шумопеленгатора (4),
индикаторы информации на слух (аудиоиндикатор) (5), индикатор визуальной информации (6).
Отличительной особенностью заявленного универсального подводного гидроакустического устройства является выбор вида и конструкции гидроакустической антенны, обеспечивающей возможность эффективной технической реализации перечисленных ранее режимов его работы операторами-водолазами.
При проведении подводных работ используются плавсредства обеспечения, как правило, водолазные суда, а еще приводные гидроакустические маяки.
Изобретение предназначено для совершенствования аппаратуры водолазов путем совмещения в одном приборе, реализующем голосовую и цифровую связь водолазов между собой и обеспечивающим судном, а также обнаружение подводных объектов в пассивном и активном режимах поиска подводных объектов и осуществления навигации.
При патентном поиске водолазного гидроакустического снаряжения не оказалось аналогов предлагаемого изобретения по совокупности используемых режимов подводного функционирования.
Известны малогабаритные устройства для звукоподводной связи водолазов, например существуют станции «Пловец» и зарубежные «Dive-Trak» фирмы RIE International, Inc, МК II Buddy Phone, SSB-2010. Последние два прибора поставляются для продажи в Российскую Федерацию.
Известны гидролокаторы, предназначенные для использования водолазами.
Можно проследить постепенное совершенствование приборов звукоподводной связи, от более ранних, к которым относится MK II Buddy Phone, SSB-2010, до настоящего времени.
При рассмотрении фотографии звукоподводной станции, размещенной на шлеме аквалангиста, обращает на себя внимание местоположение и размер гидроакустической антенны. Это малогабаритный цилиндрический элемент. Похожие по типу антенны только сферической формы использованы в отечественной гидроакустической станции «Пловец». Эти гидроакустические приборы просты по конструкции, функционируют в голосовом и телеграфном режимах на относительно коротких расстояниях, обеспечивая связь между водолазами или между водолазами и обеспечивающим судном.
В последнее время появилась информация о разработке и реализации отечественного звукоподводного комплекса с существенно расширенными эксплуатационными возможностями:
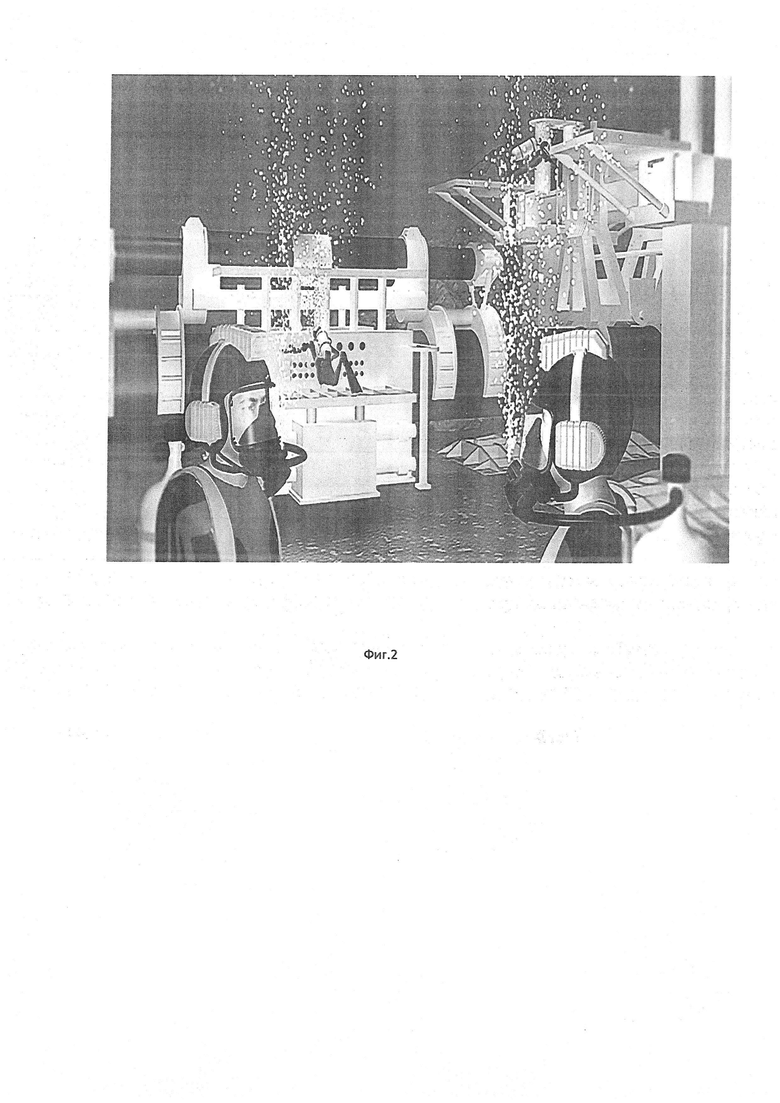
- автоматизированный водолазный комплекс навигации, пеленгации и голосовой связи «Афалина» концерна Моринформсистема «Агат» (фиг. 2).
На этом комплексе, обнаруженном в Интернете, следует остановиться подробнее, т.к. он принят в качестве прототипа для заявленного устройства. Антенны приборов этого комплекса состоят из одиночных пьезоэлектрических цилиндров.
В комплексе «Агат» используется так называемый «принцип позиционирования» связанный со сравнением фаз сигналов принимаемых гидрофонами антенны с различных направлений.
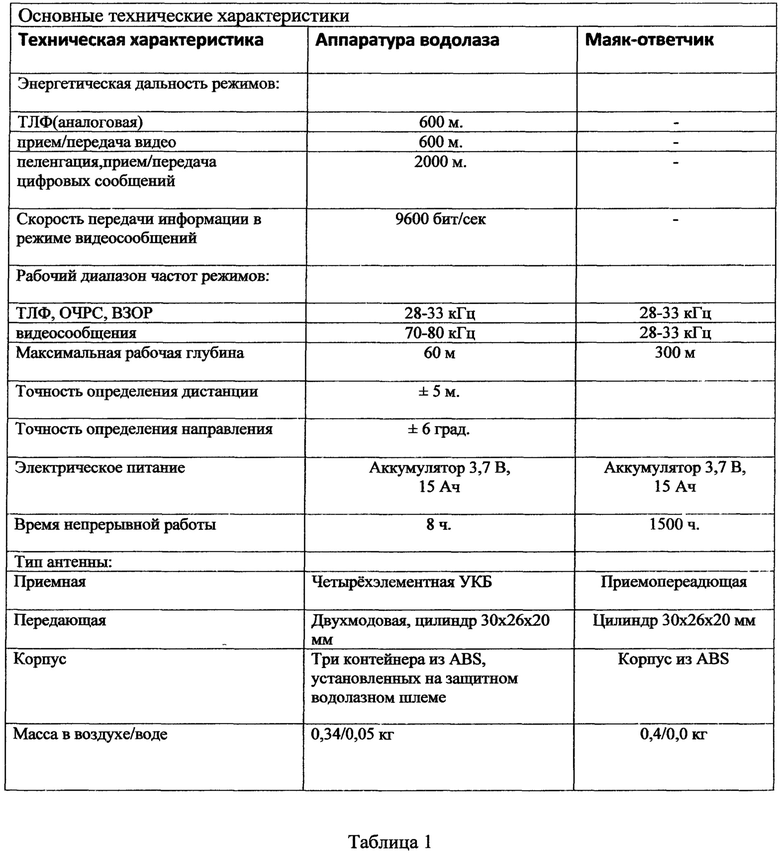
В таблице 1 приведены основные параметры данного комплекса.
- ТЛФ - телефонная голосовая связь между водолазами и обеспечивающий судном (аналоговая)
- ОЧРС - подсистема передачи и приема ограниченного числа сообщений (кодированная цифровая)
- ВЗОР - подсистема автономного взаимного ориентирования (кодированная, цифровая фазовая обработка сигналов)
- УКБ - ультракороткая база (специфическая принципиальная особенность в методе позиционирования).
В информации о прототипе отсутствуют:
- структура радиоэлектронной аппаратуры;
- соотношение сигнал-помеха, при которых реализуются указанные в таблице параметры комплекса;
- величина чувствительности передающей и приемной системы в диапазоне частот 30 кГц и соответственно 70-80 кГц;
- значение уровня шумовых помех, нарушающего работу, и вероятность ошибок в принимаемой информации, а также влияние многолучевости;
- описание особенности используемых индикаторов.
Объемы используемой информации весьма велики, в связи с чем способ представления информации корреспонденту весьма актуален.
Известно, что при ультракороткой базе, вследствие отсутствия раскорреляции помехи на приемных элементах антенны, помехоустойчивость приема должна быть низкой.
Заранее очевидно, что шестиэлементная антенна с УКБ из одиночного цилиндра размером 30×26×20 мм в режиме как излучения, так и приема на обеспечивающем судне не целесообразна из-за низкой помехоустойчивости в отношении шумовых помех, создающихся работающим двигателем судна.
Из-за выбора в качестве гидроакустической антенны антенны с малой базой полностью отсутствует у прототипа возможность обнаружения препятствий в режиме активной эхолокации объектов, не создающих акустическое излучение.
Принципиально отсутствует в этом комплексе возможность технической реализации такого режима.
Портативные малогабаритные гидролокаторы разработаны фирмами многих стран, но ни в одном из них нет совмещения режима активной эхолокации с возможностью аппаратуры звукоподводной связи.
Фирмами «Orcatron» (Канада), «Elac» (Германия), «Helle» (Великобритания) выпускается широкий диапазон портативных ГАС для водолазов. Дальность действия таких ГАС составляет десятки метров.
Например, ГАС фирмы «Orcatron» при выходной мощности 12 Вт имеет дальность действия до 60 метров, работает на частоте 200 кГц и может применяться на глубинах до 76 метров.
Наиболее близкой по своим характеристикам к заявленному прибору является ГАС D100 фирмы «Ulvertech». ГАС работает на частоте 500 кГц и обеспечивает поиск объектов на расстоянии до 100 метров. Имеется матричный светодиодный дисплей для обеспечения хорошей индикации. На задней стороне имеются цифровой дисплей для указания расстояния до объекта и поворотный дисплей для представления обстановки в графическом виде. Оборудование произведено из низко магнитных материалов. Электропитание от 2-х батарей типа РРЗ. Прибор имеет приспособление для закрепления на штативе.
Из отечественных малогабаритных гидролокаторов известен «Искатель».
К ним же относятся «звуковизоры». При малых габаритах и весе эти приборы весьма совершенны, при активной эхолокации объектов. Некоторые из них позволяют получать изображения объектов с расстояния в несколько десятков метров.
Однако эта группа приборов не имеет режимов подводной гидроакустической связи.
Заявляемое устройство, содержащее рекомендуемую гидроакустическую антенну, позволяет:
- существенно увеличить энергетическую дальность действия в режиме звукоподводной связи;
- увеличить помехоустойчивость принимаемой информации на фоне помех как естественного, так и искусственного происхождения;
- выполнять активную эхолокацию препятствий на пути движения водолазов как без средств движения, так и на индивидуальных средствах движения;
- упростить алгоритмы функционирования задействованных в работу электронных устройств.
Технический результат, создающий преимущества заявленного устройства, состоит в применении особым образом скомпанованной из составных пьезоэлектрических элементов гидроакустической антенны.
Такая антенна позволяет реализацию дополнительного режима работы, обеспечивающего обнаружение подводных препятствий и объектов внутри водной среды на пути водолаза в режиме активной гидролокации с превышением расстояния в 100 м.
Реализацию более эффективных параметров гидроакустического устройства как при передаче гидроакустической информации, так и чувствительности при ее приеме, причем во много раз более высокую, чем у звукоподводного прототипа. Это обеспечивает повышенную помехоустойчивость звукоподводной связи и существенно увеличенную дистанцию связи при прочих равных условиях в отношении прототипа.
При этом сохраняется малогабаритность гидроакустической антенны водолаза и простота ее конструктивного исполнения.
Убедительность расчета реализуемых характеристик универсального подводного гидроакустического устройства обеспечивается применением известных научных принципов.
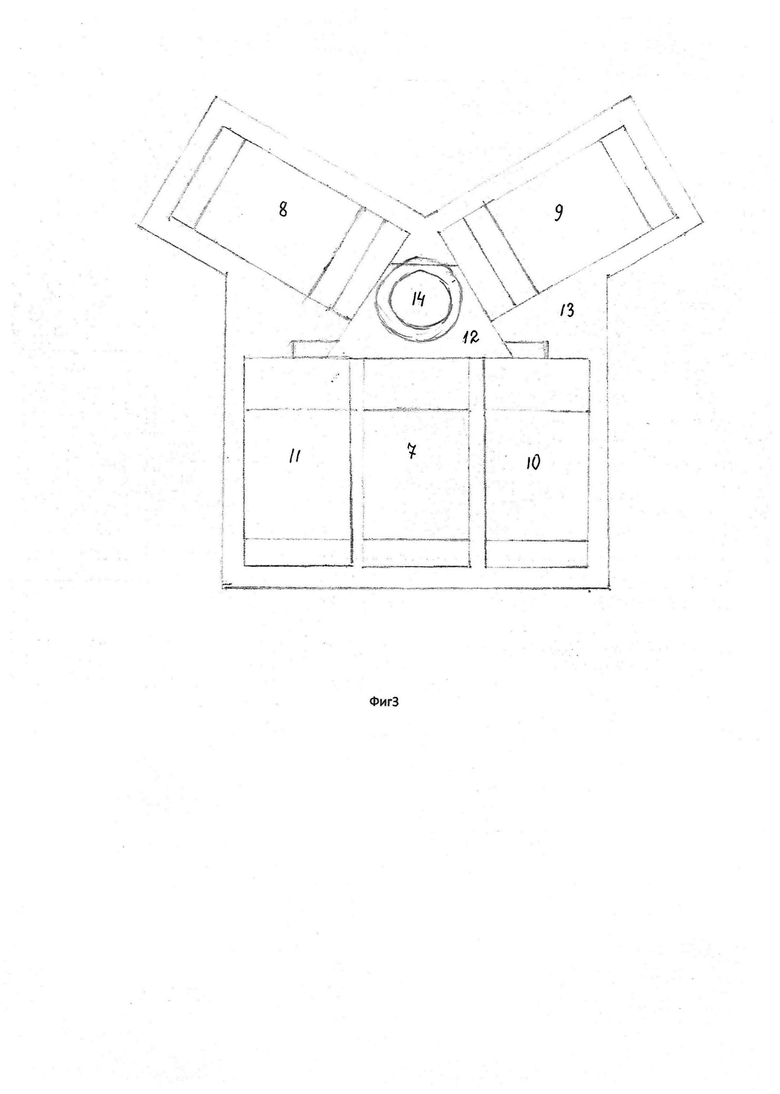
На фиг. 3 приведено устройство предлагаемой акустической (вид сверху) антенны, которая функционирует в частотном диапазоне около 30 кГц, и обеспечивает с большим превышением, практически по всем акустическим параметрам, аппаратуру, приведенную в качестве прототипа.
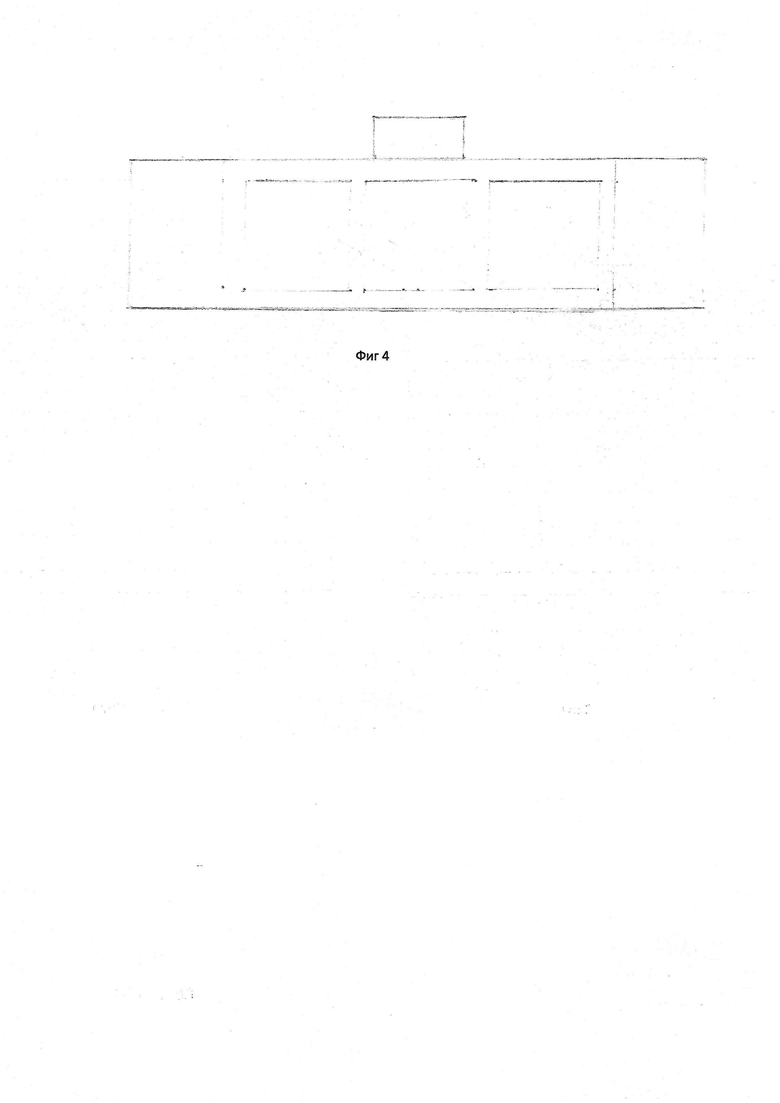
На фиг. 4 приведено это же устройство (вид спереди).
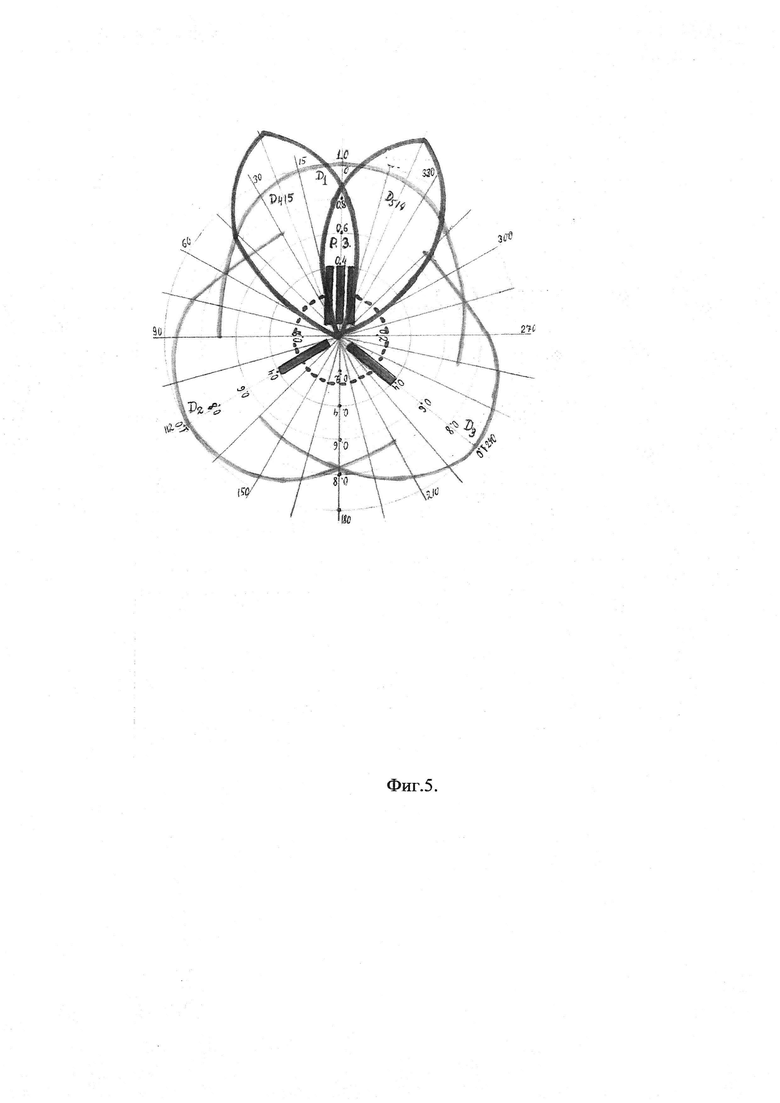
Гидроакустическая антенна состоит из совокупности «составных» пьезопреобразователей, которые образуют две группы, использование которых в различных режимах функционирования устройства может выполнятся как порознь, так и совместно. Первая группа преобразователей состоит из пьезопреобразователей 7, 8, 9, вторая - из пьезопреобразователей 7, 10, 11. Диаграммы направленности обеих групп преобразователей изображены на фиг. 5. Преобразователь 7 формирует диаграмму направленности Д1, преобразователь 8 формирует Д2, преобразователь 9 формирует Д1. Преобразователи 7, 10, 11 совместно формируют диаграммы направленности Д415, Д514. Штриховой пунктирной линией изображена в том же масштабе диаграмма направленности прототипа.
Первая группа пьезопреобразователей отличается тем, что оси преобразователей лежат в одной плоскости и ориентированы под углом 120° друг к другу. Вторая группа пьезопреобразователей также состоит из трех, два из которых размещены параллельно с обеих сторон от центрального преобразователя первой группы. Эта группа может увеличиться численно в двух плоскостях, например до пяти в горизонтальной плоскости, и наращиваться числом в перпендикулярном измерении. В последнем случае антенна спереди становиться похожей на крест и появляется возможность и целесообразность производить обработку сигналов антенны методом «креста Миллса». Дополнительные пьезопреобразователи устанавливаются над преобразователем 7 и под ним.
На фиг. 3 цифрой 12 обозначен держатель, цифрой 13 полиуретан, цифрой 14 входной сигнальный разъем.
Анализ экспериментальных результатов свидетельствуют, что:
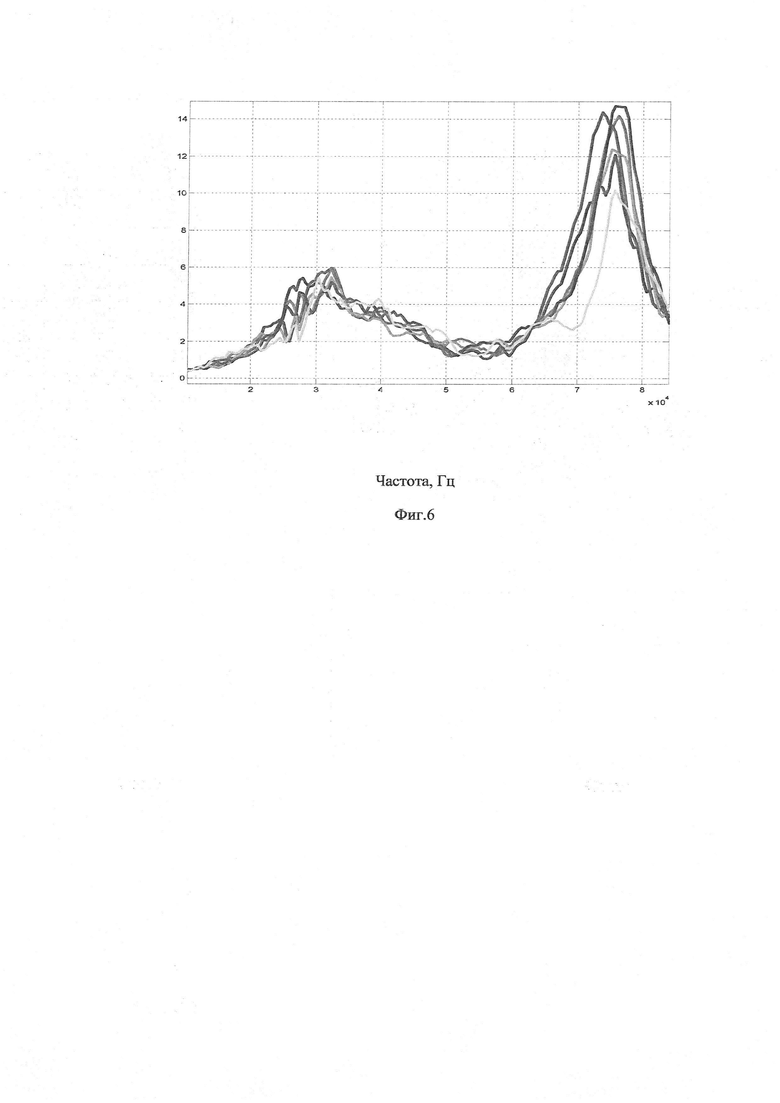
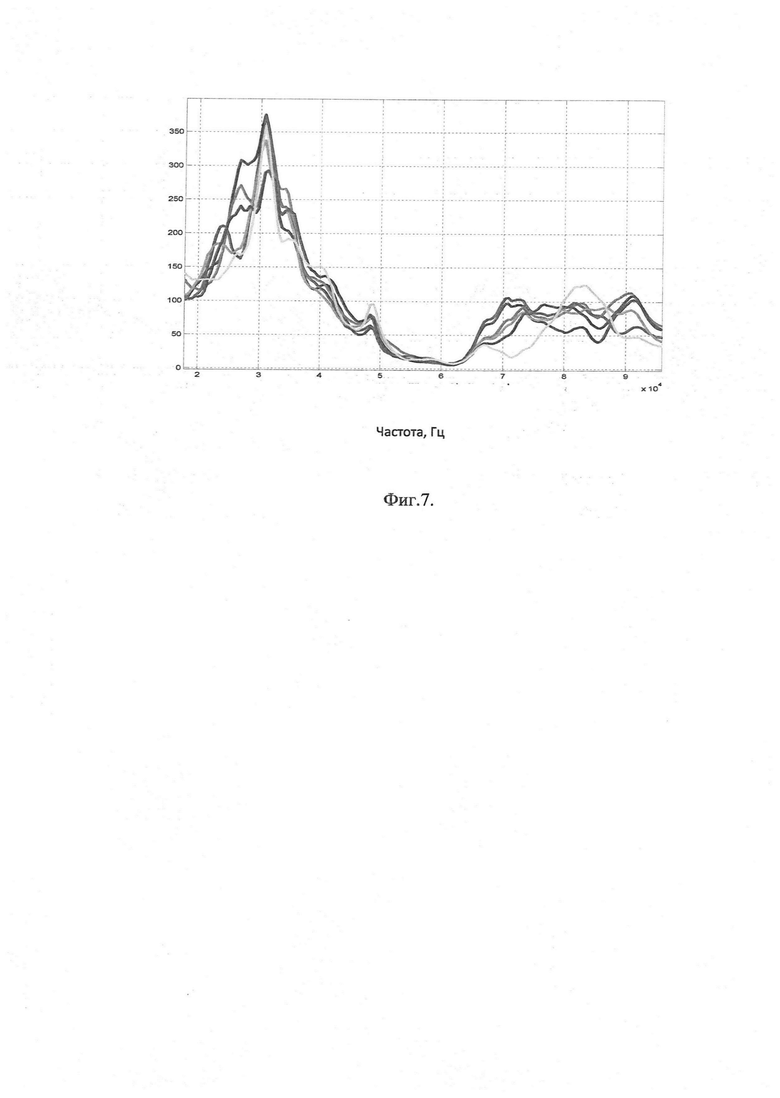
- эффективность в режиме излучения излучающего цилиндра комплекса «Агат» 4÷5 Па/В на 1 м;
- эффективность в режиме излучения каждого составного преобразователя заявленного устройства ~20 Па/В на 1 м;
- чувствительность в режиме приема цилиндрического пьезоэлемента комплекса «Агат» ~200 мкВ/Па;
- чувствительность в режиме приема каждого составного пьезопреобразователя заявленного устройства ~1500 мкВ/Па;
На фигурах 6, 7 приведены чувствительность на излучение (Па/В) и на прием элементами комплекса «Агат», приведенные к 1 метру.
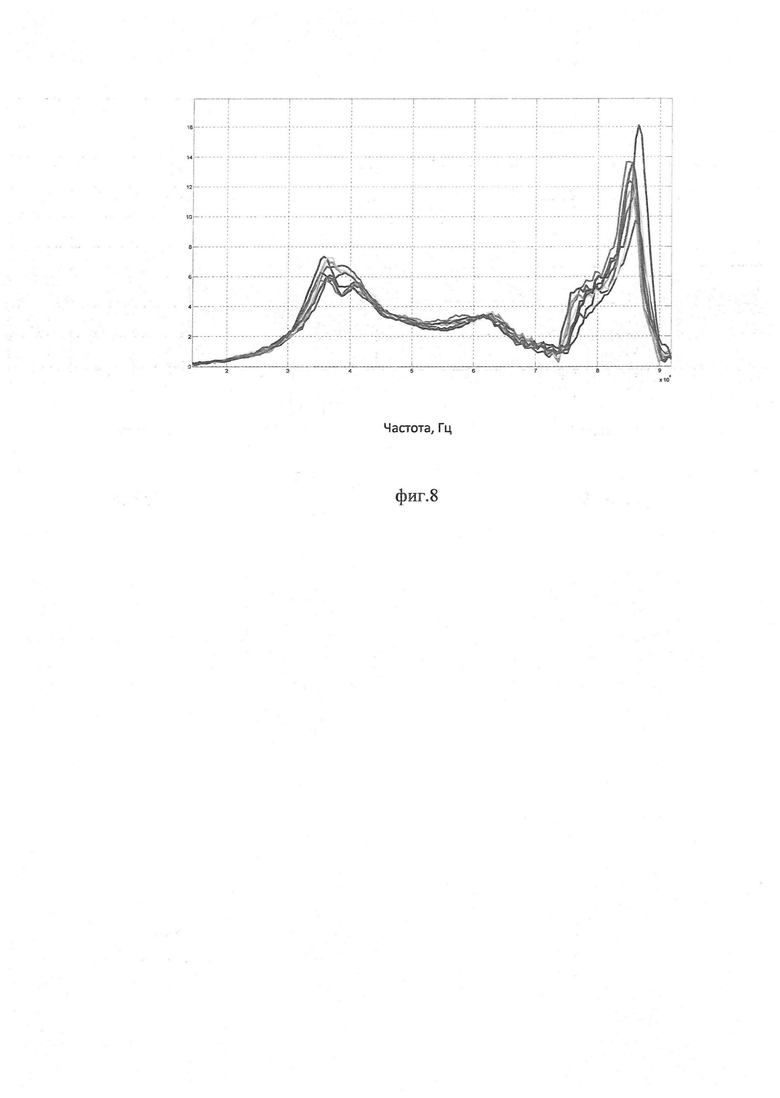
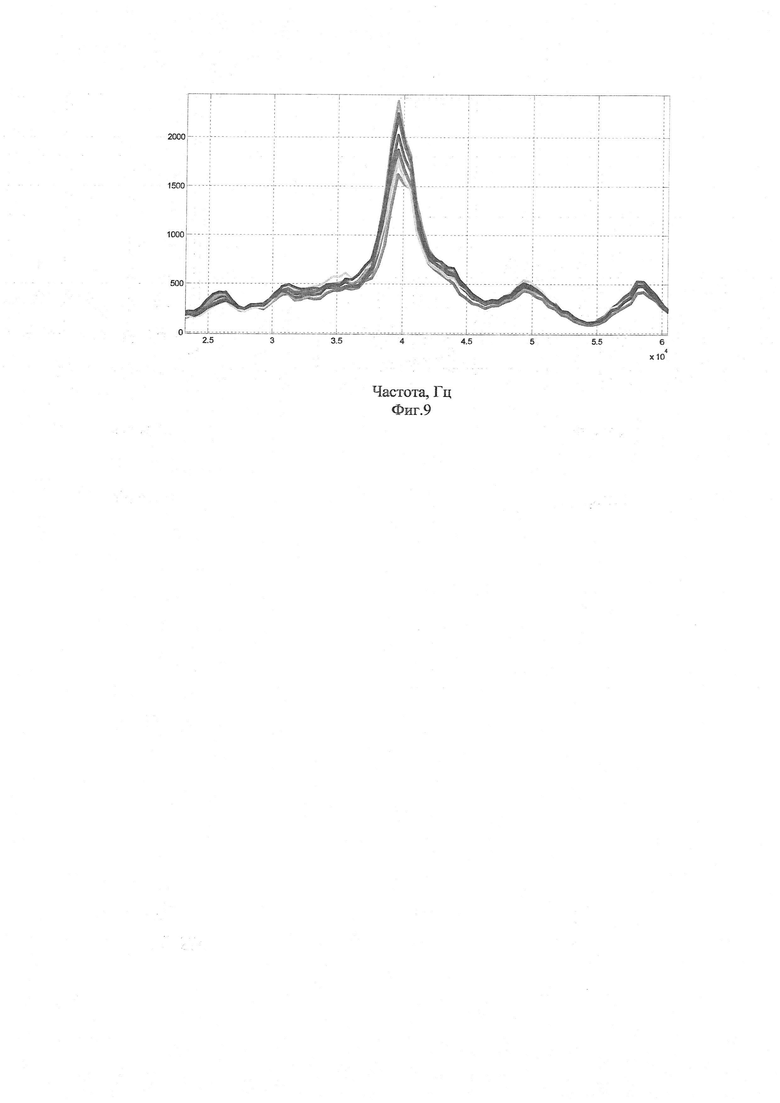
На фигурах 8, 9 приведены те же характеристики элементов заявляемого устройства, на расстоянии 4 метра.
Помехоустойчивость звукоподводной связи относительно «внешней» шумовой помехи определяется режимом излучения.
При применении единичного составного преобразователя она выше, чем у цилиндрического, в 4÷5 раз. Это достигается работой одного преобразователя первой группы пьезопреобразователей заявляемой антенны и увеличением энергетической дальности гидроакустической связи в 1,5÷2 раза, т.е. с 2000 м, заявленных в комплексе «Агат», до 3÷3,5 км.
Преимущество составного преобразователя в режиме приема связано с сопоставлением воздействия внешних шумовых помех и внутренних шумов электронной аппаратуры. Чувствительность составного преобразователя в 6÷7 раз выше, чем у цилиндрического.
При включении в режим работы второй группы преобразователей антенны эффективность излучения еще больше возрастает. Преимущество возрастает до 12÷15 по амплитуде, т.е. до 22÷25 дБ. Энергетическая дальность гидроакустической связи при этом 5÷6 км, т.е. возрастет более чем в 2,5÷3 раза. При меньших дальностях преимущество в чувствительности ведет к существенному снижению ошибок в принимаемой информации.
Рассмотрение конструкции приборов, приведенных ранее, показывает, что наиболее удобно размещать большую их часть на голове водолаза, это свойственно и прототипу.
При наличии в гидроакустических антеннах нескольких пьезопреобразователей дальнейшая обработка с выходов антенны информационных сигналов радиоэлектронными схемами может производиться как через отношение амплитуд, так и фаз принятых сигналов.
Но при всех способах чувствительность антенн в обоих режимах - излучении и приеме информации имеет важное значение, влияя на помехозащищенность звукоподводной связи.
Большое значение имеет удобство управления звукоподводной аппаратурой.
Заявляемая гидроакустическая антенна устанавливается на шлеме водолаза или на маске таким образом, что группа из параллельных пьезопреобразователей направленна вперед. Вес каждого преобразователя около 70 г, объем около 12 куб. сантиметров. Вес антенны из пяти преобразователей в воздухе около 350 г, в воде - 300 г. При трех пьезопреобразователях, направленных в одну сторону, чувствительность антенны в режиме излучения в этом направлении утраивается, при пяти преобразователях - увеличивается в 5 раз. При такой антенне упрощается логика функционирования по сравнению с логикой прототипа и, следовательно, упрощается электронная аппаратура.
Использование подводной обстановки иллюстрирует набор диаграмм направленности, изображенной на фиг. 5.
На диаграмме фиг. 5 указаны градусная сетка и относительные уровни сигнала в диаграммах направленности.
В середине фиг. 5 штриховой линией изображена диаграмма направленности ненаправленного цилиндрического излучателя, если его дополнительно установить в центре антенны.
Работа гидроакустической антенны в режиме звукоподводной связи предполагается такой:
- для приема возможной информации от водолазов, работающих в одной группе, или обеспечивающего судна, поступление которой с неизвестного направления и в произвольное время, первоначально используется первая группа пьезопреобразователей, обеспечивающая наблюдение на индикаторе за всем окружающим пространством. Информация снимается со всех пьезопреобразователей в реальном времени, путем их электронного сканирования и выведения ее на видеоиндикатор.
- после установления факта поступления информации, используя результаты видеоиндикатора, водолаз поворачивает голову с антенной в направлении, наиболее эффективного лепестка диаграммы направленности, использует вторую группу преобразователей для более помехоустойчивого приема информации или реализует двухстороннюю звукоподводную связь, через диаграммы направленности, образующие «равносигнальную зону» (изображены на фиг. 5). В этом режиме реализуются одновременно точное пеленгование направления и, при необходимости, дистанция до водолаза-корреспондента.
В благоприятной помеховой ситуации водолаз может проводить сеанс звукоподводной связи через тот же лепесток диаграммы направленности первой группы преобразователей, через который она к нему поступила.
Даже при углах раскрытия больше ±90°от максимума, она составляет величину 0,7 его, что лучше, чем у цилиндрического излучателя, которым можно решить задачу всестороннего ненаправленного излучения, эффективность которого установлена ранее близкой к 0,2÷0,25 от эффективности составного преобразователя.
Использование режима активной эхолокации производится с помощью второй группы элементов антенны. Он особенно необходим при движении водолаза на буксировщике или ином средстве движения.
Выполним поясняющие оценки. При условии что на расстоянии 1 м от антенны вторая группа пьезопреобразователей развивает акустическое давление 1000 Па, что соответствует напряжению на преобразователях второй группы, равном примерно 20÷25 В, расстояний до объекта r=200 м, акустической «силе» объекта, равной 0,2 м, на рабочей частоте около 30 кГц, на которой поглощение равно 6 дБ/км, давление, принимаемое антенной от объекта с максимального расстояния, равно:

а - абсолютная величина затухания при r=200 м: α2=1,3.
При r=100 м, давление р составляет p=10-2 Па.
При чувствительности в режиме приема 1500 мкВ/Па напряжение на входе электронного устройства при r=200 м составит 3 мкВ. При r=100 м, v=15 мкВ.
Таким образом, реальный радиус реагирования устройства без сомнения превышает 100 м и может достигнуть 150, 200 м.
Алгоритмы функционирования радиоэлектронных блоков малогабаритного универсального подводного устройства не отличаются от классических во всех режимах, и не могут претендовать на новизну, но они существенно проще, чем у прототипа в режиме позиционирования.
Сложная по составу информация может различаться и идентифицироваться оператором-водолазом с помощью аудиоиндикатора, только если она преобразована в речь. Более просто эта информация может восприниматься с помощью видео индикатора, который так же более простой, чем у прототипа.
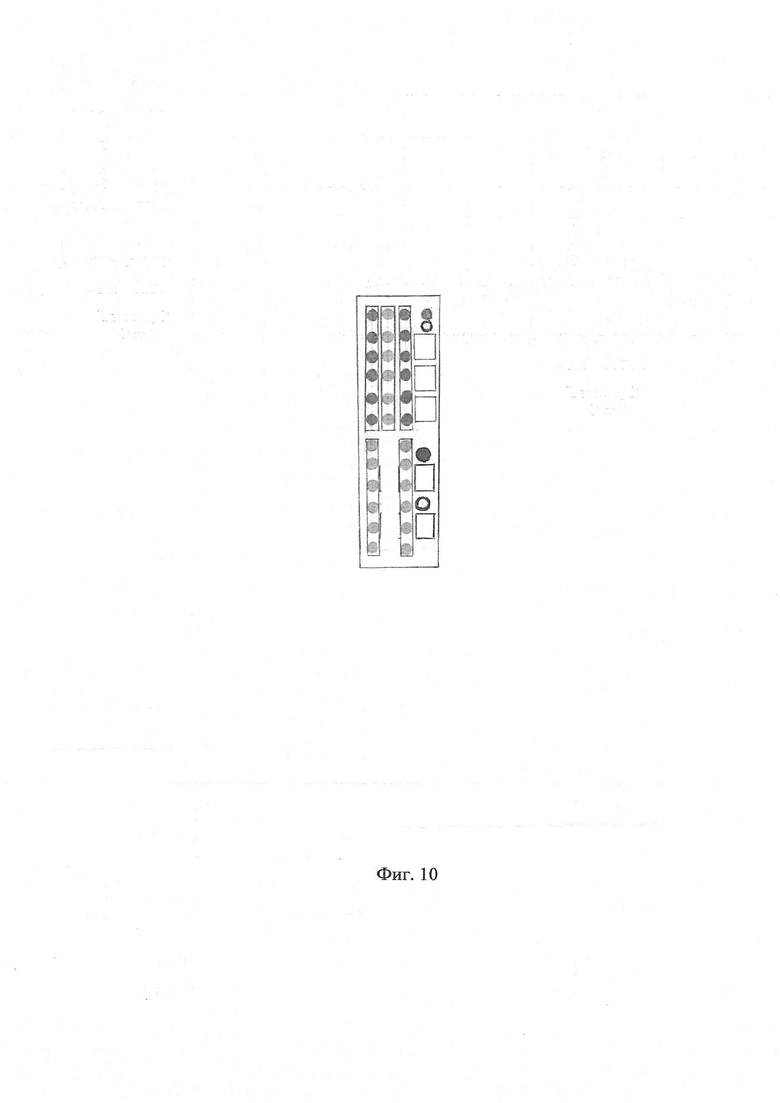
Новизной отличается только видеоиндикатор (Фиг. 10). В силу специфики конструкции гидроакустической антенны его задача представить информацию, максимально обеспечив и упростив реальную картину обстановки вокруг водолаза, и довести ее до оператора.
Это достигается тем, что изображение на индикаторе соответствует смыслу и типу диаграмм направленности антенн.
Индикация формируется двумя типами элементов:
- сверхяркими светодиодами, образующими цепочки, каждая из которых соответствует определенной диаграмме направленности антенны, направленной под углом 120° друг к другу для первой группы электроакустических преобразователей, и двумя цепочками из светодиодов другого цвета вдоль одной из предшествующих, соответствующих диаграммам направленности, образующим равносигнальную зону. Для индикации дальности до корреспондента путем запроса в режиме звукоподводной связи и дальности до объекта в режиме активной эхолокации в верхней части индикатора размещены три цифровых микросхемы из индикаторов. Вид режима измерения дальности обеспечивается соответствующим каждому из них светодиодами разного цвета, установленными над цифровыми индикаторами.
В нижней части индикатора размещены цифровые микросхемы индикаторов для режимов ВЗОР и ОЧРС, показывающие номер, присвоенный водолазу, с которых производится связь, и номер команды в режиме ОЧРС. Каждому из цифровых индикаторов в соответствие приданы сверхяркие светодиоды, регулирующие безошибочное определение водолазом режима звукоподводной связи с помощью цвета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Личная подводная спасательная и навигационная система | 2015 |
|
RU2623423C2 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| АКУСТИЧЕСКИЙ УКАЗАТЕЛЬ НАПРАВЛЕНИЯ (АУН) (ВАРИАНТЫ) | 2003 |
|
RU2260194C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
Малогабаритное универсальное подводное гидроакустическое устройство - это комплекс совмещенных приборов гидроакустической станции звукоподводной связи, реализующий также функцию пассивного пеленгатора, и активного гидролокатора, которое предназначено стать частью экипировки водолазов и дайверов. Отличительной особенностью заявленного универсального подводного гидроакустического устройства является выбор вида и конструкции гидроакустической антенны, обеспечивающей возможность эффективной технической реализации перечисленных ранее режимов его работы операторами-водолазами. Изобретение предназначено для совершенствования аппаратуры водолазов путем совмещения в одном приборе, реализующем голосовую и цифровую связь водолазов между собой и обеспечивающим судном, а также обнаружение подводных объектов в пассивном и активном режимах поиска подводных объектов и осуществления навигации. Технический результат: реализация дополнительного режима работы, обеспечивающего обнаружение подводных препятствий и объектов внутри водной среды на пути водолаза в режиме активной гидролокации, реализация чувствительности как при излучении, так и при приеме информации, повышение помехоустойчивости звукоподводной связи и увеличение дистанции связи. Малогабаритное универсальное подводное гидроакустическое устройство содержит комплекс аппаратуры звукоподводной гидроакустической связи между водолазами и активный гидролокатор, состоящий из блока гидроакустических антенн, радиоэлектронного блока и индикаторов информации, представляющих аудио- и видеогарнитуру водолаза. При этом универсальная гидроакустическая антенна представляет собой совокупность двух групп «составных» пьезопреобразователей, у одной из которых оси лежат в одной плоскости, у соседних пьезопреобразователей ориентированы под одинаковыми углами друг к другу, вторая группа пьезопреобразователей размещена параллельно с обеих сторон от одного из пьезопреобразователей первой группы, способна увеличиваться численно как в плоскости первой группы, так и в перпендикулярной плоскости, видеоиндикатор устройства - герметичный блок с тремя цепочками светодиодов одного цвета, из которых каждая соответствует определенному пьезопреобразователю первой группы, и двумя цепочками светодиодов другого цвета, соответствующих пьезопреобразователям второй группы, две группы цифровых индикаторов, одна из которых регистрирует по решению водолаза расстояние до корреспондента в режиме звукоподводной связи или расстояние до объекта, представляющего подводное препятствие. Вторая группа цифровых индикаторов регистрирует номер особой команды в режиме ОЧРС и «позывной» корреспондента по звукоподводной связи. 10 ил., 1 табл.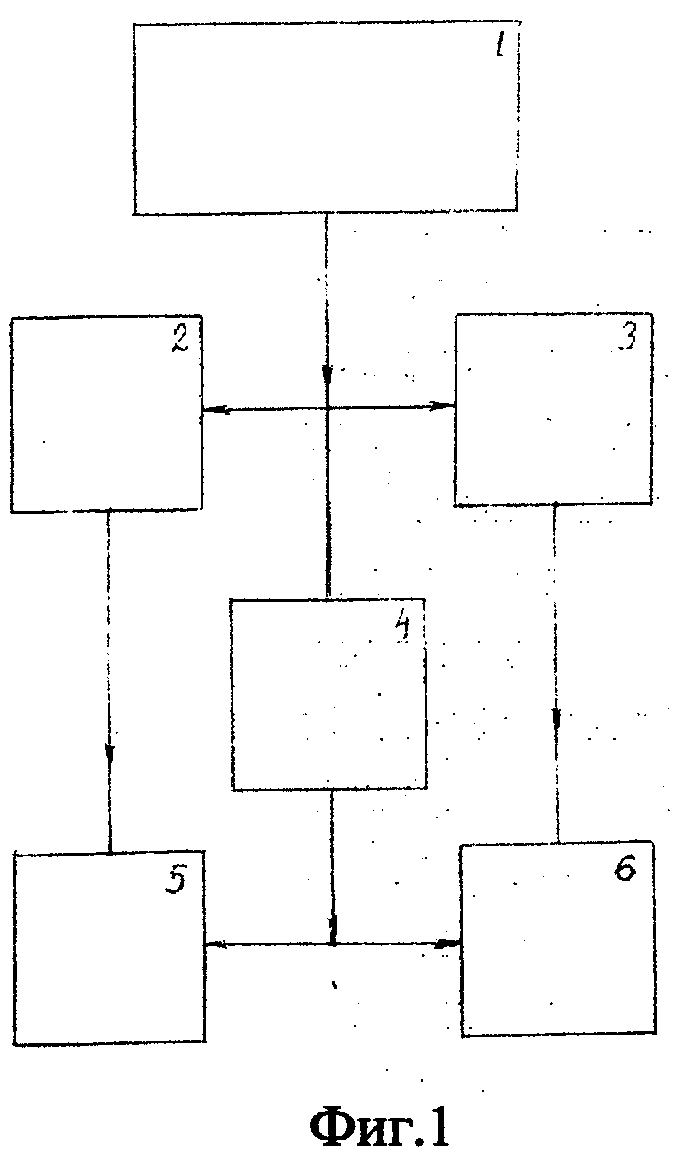
Малогабаритное универсальное подводное гидроакустическое устройство, содержащее комплекс аппаратуры звукоподводной гидроакустической связи между водолазами и активный гидролокатор, состоящее из блока гидроакустических антенн, радиоэлектронного блока и индикаторов информации, представляющих аудио- и видеогарнитуру водолаза, отличающееся тем, что универсальная гидроакустическая антенна - совокупность двух групп «составных» пьезопреобразователей, у одной из которых оси лежат в одной плоскости, у соседних пьезопреобразователей ориентированы под одинаковыми углами друг к другу, вторая группа пьезопреобразователей размещена параллельно с обеих сторон от одного из пьезопреобразователей первой группы, способна увеличиваться численно как в плоскости первой группы, так и в перпендикулярной плоскости, видеоиндикатор устройства - герметичный блок с тремя цепочками светодиодов одного цвета, из которых каждая соответствует определенному пьезопреобразователю первой группы, и двумя цепочками светодиодов другого цвета, соответствующих пьезопреобразователям второй группы, две группы цифровых индикаторов, одна из которых регистрирует по решению водолаза расстояние до корреспондента в режиме звукоподводной связи или расстояние до объекта, представляющего подводное препятствие, вторая группа цифровых индикаторов регистрирует номер особой команды в режиме ОЧРС и «позывной» корреспондента по звукоподводной связи.
| СИСТЕМА СКРЫТНОЙ ГИДРОАКУСТИЧЕСКОЙ СВЯЗИ | 2009 |
|
RU2397915C1 |
| 0 |
|
SU153714A1 | |
| ПЕЛЕНГАТОР ВОДОЛАЗА | 2012 |
|
RU2494914C1 |
| JP 2003152656 A, 23.05.2003 | |||
| Станок для обточки деревянных бочек | 1952 |
|
SU97539A1 |

