Устройство относится к области измерительной техники и может быть использовано для визуализации, математического моделирования и распознавания трехмерных объектов.
Устройство реализует принцип структурированной подсветки измеряемой поверхности и принцип триангуляции для получения ее точек.
Известны устройства (например сканеры Range Vision, Artec 3d), применяющие двоичное структурирование света, которые, при условии приемлемой точности, должны использовать 7-8 тактов съемки за цикл. Известны также устройства, использующие гармоническую подсветку. Так, устройство, описанное в заявке №2018138617/28(064184) использует только 5 тактов съемки.
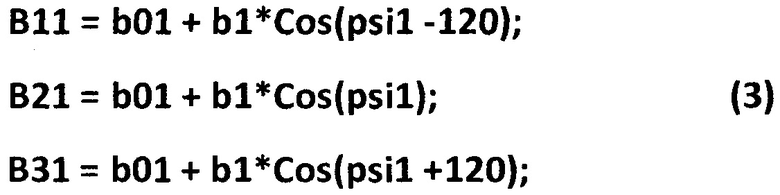
Наиболее близким является устройство, описанное в [1]. Оно выбрано в качестве ближайшего прототипа. Устройство содержит проектор Р и камеру С, которая смещена относительно проектора на величину dY (фиг. 1). В качестве структурированной подсветки используется гармонический световой сигнал и всего три такта съемки за цикл. При этом в каждом такте фаза светового сигнала проектора меняется на 120 градусов. В этом случае в любой точке поверхности, для сигналов на выходе камеры имеем:
Из уравнений (1) легко получить выражение для угла psi - фазы сигнала в этой точке:
psi = arctan(√3 *(B1 – B3)/(2*B2 – B1 – B3)) + 2k*Pi; (2)
Таким образом, для любой точки N (фиг. 1) с координатой у луча CN, по трем значениям В1, В2, В3 определяется фаза psi сигнала камеры в этой точке (которая совпадает с фазой сигнала проектора для этой точки). Зная значение psi для проектора, можно определить точку N0 и координату у0 порождающего луча проектора PN0. Точка М пересечения лучей CN и PN0 является точкой измеряемой поверхности. Ее легко найти из треугольников РМСи NMN0.
Описанное устройство обладает существенным недостатком. Фаза psi не должна превышать значения 2Pi (k=0). В противном случае, появляется неоднозначность решения (2). Физически это означает, что смещения световой полосы, связанные с изменением координаты Z измеряемой поверхности, не должны превышать ее ширины, (ширина полосы - это период гармонических колебаний). С другой стороны, ширину полосы проецируемого света нельзя делать большой, т.к. это приводит к резкому падению точности (из-за нелинейных искажений). Таким образом, недостатком устройства является малый допустимый диапазон перепадов уровня Z поверхности.
Сущность заявляемого устройства состоит в том, что с целью расширения допустимого диапазона перепадов уровня Z поверхности и увеличения точности за счет уменьшения ширины световых полос, оно имеет дополнительную камеру С1 (Фиг. 2), которая расположена на малом расстоянии dY1 от проектора и работает синхронно с основной камерой С.
Новизна устройства состоит в том что в нем:
1. Вводится дополнительная камера, которая расположена на малом расстоянии от проектора и которая также осуществляет 3 такта съемки, синхронно с основной камерой.
2. Информация с дополнительной камеры поступает на вычислительное устройство ВУ и используется совместно с информацией основной камеры.
Наличие указанных существенных признаков приводит к достижению технического результата, который выражается в расширении допустимого диапазона перепадов уровня Z измеряемой поверхности и повышении точности за счет использования узких световых полос.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения. Других технических решений аналогичного назначения с подобными существенными признаками не обнаружено.
На фиг. 1 показана схема работы прототипа.
Фиг. 2 поясняет принцип работы предлагаемого устройства. Здесь Р - проектор, С - основная камера, С1 - дополнительная камера, ВУ - вычислительное устройство.
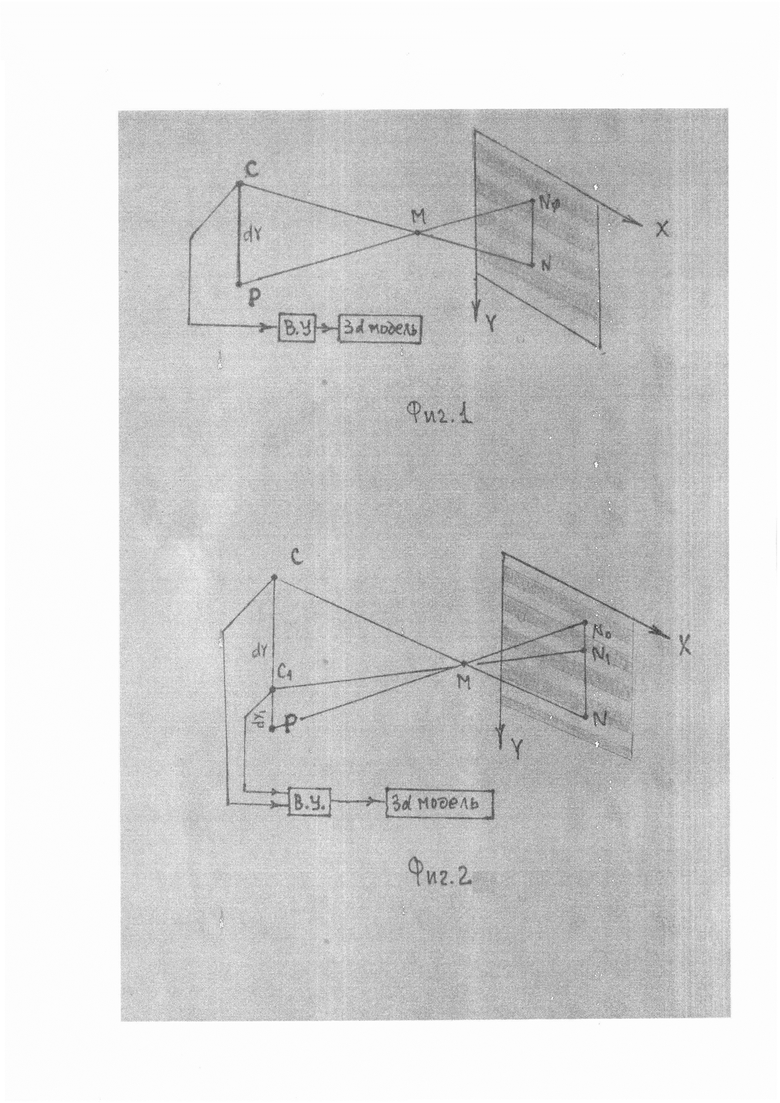
На фиг. 3а, 3б показаны 3 такта проектора, отснятые камерами С1 и С, соответственно
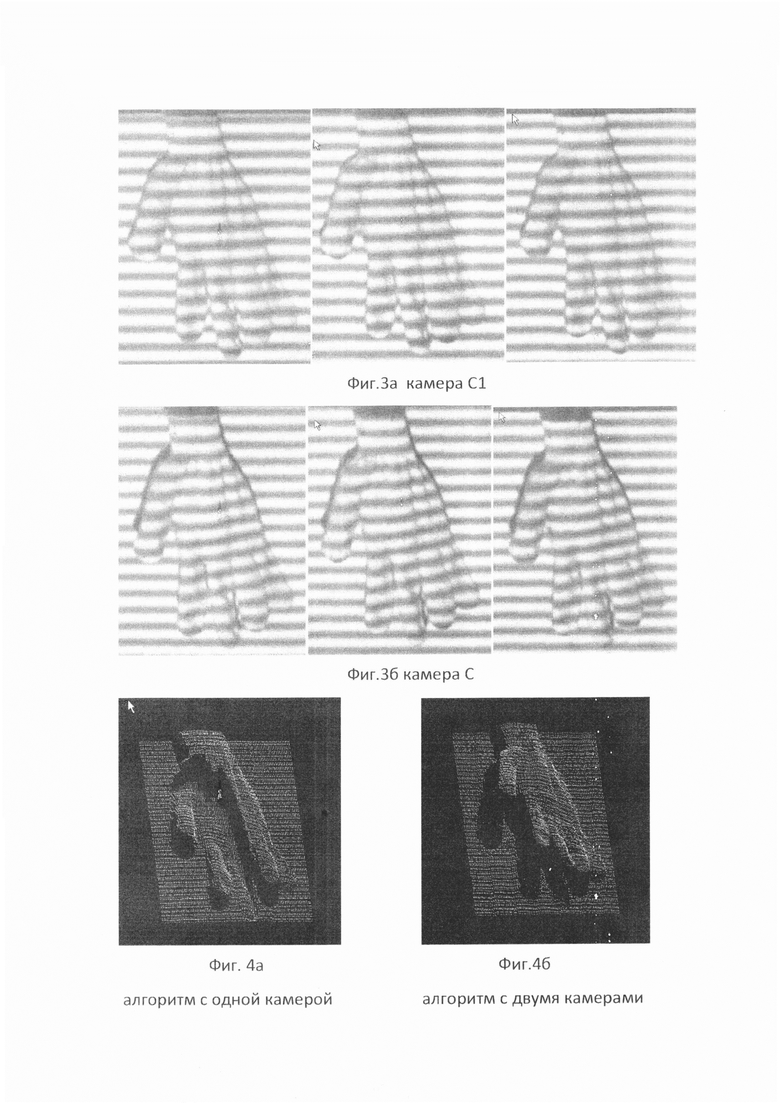
На фиг. 4а показана 3-d модель объекта при использовании алгоритма прототипа [1].
На фиг. 4б - результат работы (3-d модель объекта) для предлагаемого устройства.
Устройство работает следующим образом. В трех тактах съемки проектор формирует три различных световых сигнала (фиг. 3а, б) - световые полосы, параллельные оси X, сдвинутые по фазе на 120 градусов относительно друг друга вдоль оси Y.
На выходе камеры С, для каждой точки поверхности эти сигналы описываются уравнениями (1), где В1-В3 - интенсивности сигналов, psi - их фазовый сдвиг, b0 - средняя составляющая, b - амплитуда. Из (1) легко выводится выражение (2) для угла psi.
Аналогичным образом, для камеры С1 будем иметь:
откуда:
psi = arctan(√3 *(B11 – B31)/(2*B21 – B11 – B31)); (4)
Камера С1 расположена на таком близком расстоянии dY1 от проектора (Фиг. 2), что при максимальном перепаде уровня измеряемой поверхности, величина смещения световых полос не превышает их ширины. Иными словами значения psi1 в любой точке не превышают величины 2Pi (k=0) и, следовательно, с помощью (4) определяются вычислительным устройством ВУ однозначно.
По найденному значению psi1 нельзя находить точки измеряемой поверхности, т.к. мала точность из-за малости величины dY1, однако, ее хватает, чтобы определить количество 2Pi - интервалов в выражении (2) для угла psi. Таким образом, с помощью psi1, угол psi определяется вычислительным устройством также однозначно. Далее, используя значение psi, ВУ находит координаты точек измеряемой поверхности методом триангуляции, описанном выше для прототипа в любом диапазоне изменения координаты Z.
На фиг. 4б показан результат работы предлагаемого устройства.
На фиг. 4а показана 3-d модель объекта при использовании алгоритма прототипа в случае перепадов, превышающих ширину полосы. (Виден разрыв поверхности).
Устройство может использоваться в различных технологических процессах с целью визуализации, математического моделирования и физического воспроизведения геометрии трехмерных объектов.
Литература.
[1] Peisen S. Huang and Song Zhang. Fast three-step phase-shifting algorithm.
[2] Song Zhang. Recent progresses on real-time 3D shape measurement using digital fringe projection techniques.
[3] Patent: Method and Apparatus for Absolute-Coordinate Three-Dimension Surface Imaging. Song Zhang, …
| название | год | авторы | номер документа |
|---|---|---|---|
| Пятитактный фазовый 3-d сканер | 2018 |
|
RU2701440C1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2649420C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ТЕНИ ОТ ТОНКОГО СТЕРЖНЯ ИЛИ НИТИ | 2017 |
|
RU2706806C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2007 |
|
RU2365876C2 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ | 2010 |
|
RU2448323C1 |
| ПРОТИВОТУМАННАЯ ФАРА ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2112904C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА И ПРЕДСТАВЛЕНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ НА УПОМЯНУТОЙ ПОВЕРХНОСТИ | 2005 |
|
RU2295110C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| СИСТЕМА И СПОСОБ ТРЕХМЕРНОГО ИЗМЕРЕНИЯ ФОРМЫ МАТЕРИАЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2521725C2 |
| СПОСОБ МАШИННОГО СТЕРЕОЗРЕНИЯ | 2021 |
|
RU2816541C2 |
Изобретение относится к области измерительной техники и может быть использовано для визуализации, математического моделирования и распознавания трехмерных объектов. Заявленное устройство содержит проектор, который осуществляет за три такта съемки проецирование на измеряемый объект трех типов, сдвинутых по фазе относительно друг друга, гармонических синусоидальных световых сигналов (полос), основную регистрирующую камеру, которая смещена относительно проектора на определенную величину и которая осуществляет регистрацию этих сигналов и передачу их на вычислительное устройство для определения координат измеряемой поверхности. Устройство дополнительно содержит камеру, которая расположена на малом расстоянии от проектора и производит три такта съемки синхронно с основной камерой. Информация с дополнительной камеры поступает на вычислительное устройство и используется для определения количества 2Pi интервалов в сдвиге полос основной камеры при вычислении координат измеряемой поверхности. Технический результат - расширение допустимого диапазона перепадов уровня Z измеряемой поверхности и повышение точности за счет использования узких световых полос. 4 ил.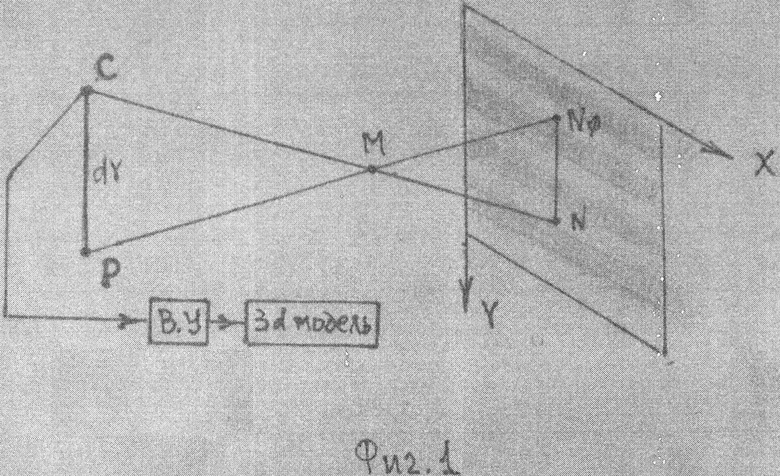
Устройство дистанционного измерения трехмерных объектов, содержащее проектор, который осуществляет за три такта съемки проецирование на измеряемый объект трех типов, сдвинутых по фазе относительно друг друга, гармонических синусоидальных световых сигналов (полос), и основную регистрирующую камеру, которая смещена относительно проектора на определенную величину и которая осуществляет регистрацию этих сигналов и передачу их на вычислительное устройство для определения координат измеряемой поверхности, отличающееся тем, что с целью увеличения диапазона глубины измерений, а также повышения точности за счет уменьшения ширины полос вводится дополнительная камера, которая смещена относительно проектора на небольшую величину и которая снимает синхронно с основной камерой, причем дополнительная информация, получаемая этой камерой, используется вычислительным устройством для определения количества 2Pi интервалов в сдвиге полос основной камеры при вычислении координат измеряемой поверхности.
| Peisen S | |||
| Huang and Song Zhang | |||
| Fast three-step phase-shifting algorithm | |||
| US 2009238449 A1, 24.09.2009 | |||
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2649420C2 |
| US 20070115484 A1, 24.05.2007. | |||

