ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится, в общем, к устройствам управления процессом, таким как клапаны, и, в частности, к способам, системам и устройствам для диагностики постороннего или избыточного перемещения устройства управления процессом в системе управления процессами.
УРОВЕНЬ ТЕХНИКИ
[0002] Электронные контроллерные устройства (например, электропневматический контроллер, программируемые контроллеры, аналоговые контуры управления и т.д.) обычно используются для управления устройствами управления процессом (которые также попеременно упоминаются в настоящем описании как “устройства управления” или “полевые устройства”, например, регулировочные клапаны, насосы, демпферы и т.д.). Такие электронные контроллерные устройства приводят в действие устройства управления процессом для работы определенным образом. В целях безопасности, экономической эффективности и надежности для приведения в действие устройств управления процессом используются многие широко известные мембранные или поршневые пневматические приводы, которые обычно связаны с общей системой управления процессами посредством электропневматического контроллера. Электропневматические контроллеры, как правило, выполнены с возможностью приема одного или более сигналов управления и преобразования этих сигналов управления в давление, подаваемое на пневматический привод, чтобы добиться требуемой работы устройства управления процессом, соединенного с этим пневматическим приводом. Например, если стандартная программа управления процессом требует, чтобы пневматически активируемый клапан пропускал больший объем технологической текучей среды, величина сигнала управления, подаваемого на электропневматический контроллер, связанный с клапаном, может быть увеличена (например, с 10 миллиампер (мА) до 15 мА, если электропневматический контроллер выполнен с возможностью приема сигнала управления в 4-20 мА).
[0003] Электропневматические контроллеры обычно используют сигнал обратной связи, вырабатываемый измерительной системой или элементом обратной связи (например, позиционным преобразователем или датчиком положения), который обнаруживает или измеряет рабочую реакцию пневматически активируемого устройства управления. Например, датчик положения, соединенный с устройством управления, может измерять перемещение привода устройства управления, при этом может выдавать по проводному или беспроводному соединению сигнал обратной связи, характеризующий положение или состояние устройства управления, на контроллер устройства управления.
[0004] Техническое состояние и работоспособность устройств управления процессом, а также, в конечном счете, эксплуатационные характеристики технологической системы могут подвергаться неблагоприятному воздействию различных факторов. В случае такого устройства управления, как регулировочный клапанный узел, например, вследствие движения или вибрации клапана поток может становиться неплотным и/или может произойти ослабление соединения компонентов. Таким образом, для мониторинга технического состояния и/или остаточного срока службы регулировочного клапанного узла и/или одного или нескольких компонентов регулировочного клапанного узла с устройством управления может быть соединено диагностическое устройство. Диагностическое устройство может контролировать обследуемое устройство управления на предмет перемещения и/или вибрации, а при выявлении постороннего или избыточного перемещения или чрезмерной вибрации диагностическое устройство может выработать предупредительный или аварийный сигнал, который может передаваться, например, на контроллер устройства.
[0005] Известные диагностические устройства обычно включают в себя акселерометр для определения перемещения и/или вибрации обследуемого устройства управления, а также процессор, который периодически или постоянно опрашивает акселерометр для получения текущих данных по движению и/или вибрации. Таким образом, известные диагностические устройства должны непрерывно расходовать энергию для питания процессора, чтобы процессор мог отправлять запросы, даже когда движение или вибрация устройства управления находится в допустимых пределах. Кроме того, известные диагностические устройства обычно также должны непрерывно расходовать энергию для питания других компонентов.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0006] Согласно первому иллюстративному аспекту предложено устройство для диагностики устройства управления, используемого в системе управления процессами, может включать в себя акселерометр, чувствительный к движению устройства управления. Акселерометр может быть выполнен с возможностью выработки сигнала, когда величина движения устройства управления превышает пороговую величину, при этом сигнал должен активировать один или несколько компонентов диагностического устройства. Например, диагностическое устройство может включать в себя модуль связи, выполненный с возможностью активироваться по сигналу, выработанному акселерометром. Кроме того, модуль связи может быть выполнен с возможностью передавать, после активации, сигнал, указывающий на то, что величина движения устройства управления превышает пороговую величину.
[0007] Согласно второму иллюстративному аспекту предложен способ диагностики устройства управления, используемого в системе управления процессами, который может включать в себя определение величины движения устройства управления посредством диагностического устройства, соединенного с устройством управления,. Устройство управления может представлять собой, например, устройство управления процессом, такое как клапан, насос, демпфер и т.д., при этом определение величины движения устройства управления может выполняться акселерометром, входящим в состав диагностического устройства. Способ может включать в себя активацию модуля связи диагностического устройства, когда величина движения устройства управления превышает пороговое значение, а также передачу беспроводного сигнала по беспроводной линии связи с диагностического устройства с использованием активированного модуля связи, при этом сигнал указывает на то, что величина движения устройства управления превышает пороговое значение.
[0008] Согласно первому или второму из предшествующих аспектов, либо им обоим, устройство и/или способ для диагностики устройства управления процессом (например, диагностическое устройство для устройства управления процессом) может дополнительно включать в себя любую одну или несколько из нижеследующих предпочтительных форм.
[0009] В одной предпочтительной форме диагностическое устройство может включать в себя соединитель, который физически связывает диагностическое устройство с устройством управления. Например, соединитель может соединять диагностическое устройство со штоком или приводом устройства управления.
[0010] В другой предпочтительной форме модуль связи может пребывать в состоянии с отключенным питанием, состоянии сна или другом состоянии энергосбережения до активации.
[0011] В другой предпочтительной форме диагностическое устройство может включать в себя процессор, расположенный с возможностью связи между акселерометром и модулем связи. Процессор может быть выполнен с возможностью приема сигнала, выработанного акселерометром, когда величина движения устройства управления превышает пороговую величину или пороговое значение, а также осуществления активации модуля связи при приеме сигнала, выработанного акселерометром.
[0012] В еще одной предпочтительной форме акселерометр и модуль связи могут быть непосредственно связаны или могут иметь соединение для непосредственной связи. Например, диагностическое устройство может не содержать какой-либо процессор, расположенный с возможностью связи между акселерометром и модулем связи.
[0013] В другой предпочтительной форме диагностическое устройство может включать в себя устройство для сбора энергии, при этом модуль связи может активироваться путем использования энергии, собранной устройством для сбора энергии.
[0014] В дополнительной предпочтительной форме диагностическое устройство может включать в себя устройство для хранения энергии, при этом модуль связи может активироваться путем использования энергии, хранящейся в устройстве для хранения энергии. В некоторых конфигурациях устройство для хранения энергии может хранить энергию, собранную устройством для сбора энергии.
[0015] В дополнительной предпочтительной форме сигнал, передаваемый модулем связи диагностического устройства, может соответствовать протоколу WirelessHART®, протоколу Zigbee® или протоколу беспроводной связи малого радиуса действия (short-range wireless).
[0016] В другой предпочтительной форме устройство управления может представлять собой клапан.
[0017] В другой предпочтительной форме пороговая величина или пороговое значение может поддаваться изменению или поддаваться настройке.
[0018] В еще одной предпочтительной форме движение устройства управления может представлять собой вибрацию устройства управления.
[0019] В одном предпочтительном способе определение величины движения устройства управления может включать в себя определение амплитуды вибрации устройства управления.
[0020] В другом предпочтительном способе осуществление активации модуля связи диагностического устройства может включать в себя осуществление активации модуля связи диагностического устройства по сигналу, выработанному акселерометром, когда величина движения устройства управления превышает пороговую величину или пороговое значение.
[0021] В еще одном предпочтительном способе осуществление активации модуля связи диагностического устройства может включать в себя осуществление активации модуля связи из состояния с отключенным питанием, состояния сна или другого состояния энергосбережения.
[0022] В дополнительном предпочтительном способе осуществление передачи беспроводного сигнала с диагностического устройства может включать в себя осуществление передачи беспроводного сигнала с диагностического устройства по меньшей мере на один из следующих объектов: контроллер устройства управления; главный компьютер системы управления процессами; или устройство, сопряженное с диагностическим устройством, при этом сопряженное устройство по меньшей мере (1) расположено с возможностью связи между диагностическим устройством и контроллером либо (2) расположено с возможностью связи между диагностическим устройством и главным компьютером системы управления.
[0023] В другом предпочтительном способе осуществление передачи сигнала с диагностического устройства может включать в себя осуществление передачи сигнала с диагностического устройства с использованием протокола WirelessHART, протокола Zigbee или протокола беспроводной связи малого радиуса действия.
[0024] Согласно другому предпочтительному варианту способ может дополнительно включать в себя подачу энергии на модуль связи, используя энергию, хранящуюся в устройстве для хранения энергии, входящем в состав диагностического устройства или расположенном вблизи него.
[0025] Согласно еще одному предпочтительному варианту способ может включать в себя подзарядку устройства для хранения энергии посредством использования по меньшей мере одного из: солнечной энергии, временного соединения устройства для хранения энергии с источником энергии, восстановленной энергии от локальной вибрации или перемещения, либо передачи энергии индукционным способом от бесконтактного зарядного устройства.
[0026] В дополнительном предпочтительном способе определение величины движения устройства управления может включать в себя определение величины движения клапана.
[0027] В другом предпочтительном способе пороговая величина или пороговое значение может храниться в акселерометре диагностического устройства, при этом способ может дополнительно включать в себя изменение пороговой величины или порогового значения, хранящегося в акселерометре диагностического устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0028] На ФИГ. 1 показана блок-схема примера системы управления процессами, в состав которой входит пример диагностического устройства для диагностики устройства управления процессом системы управления процессами;
[0029] на ФИГ. 2 показана подробная блок-схема примера диагностического устройства по ФИГ. 1;
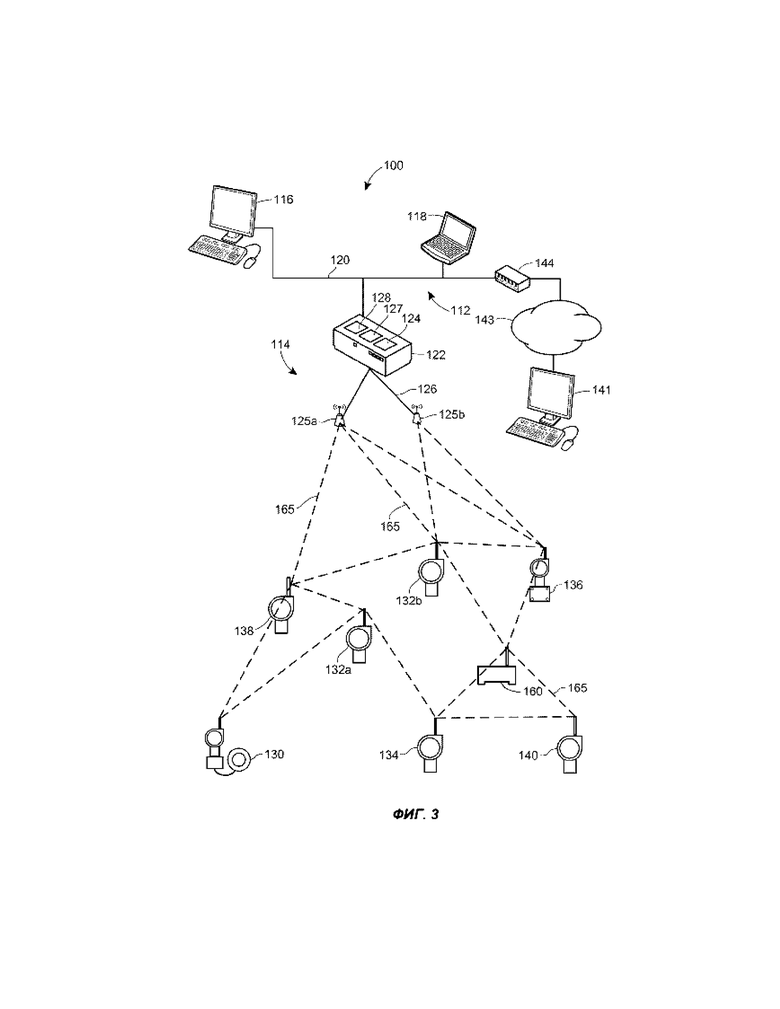
[0030] на ФИГ. 3 показана блок-схема, иллюстрирующая пример системы управления процессами, в которой применяется беспроводная сеть для обеспечения беспроводной связи между устройствами управления процессом, контроллерами, маршрутизаторами и другими сетевыми устройствами;
[0031] на ФИГ. 4 показан пример способа диагностики устройства управления процессом системы управления процессами.
ПОДРОБНОЕ ОПИСАНИЕ
[0032] Хотя ниже описаны примеры способов и устройства, содержащих в числе прочих компонентов программное обеспечение и/или программно-аппаратное обеспечение, реализованные на аппаратном обеспечении, следует отметить, что такие системы приведены лишь в качестве иллюстрации и не должны рассматриваться как ограничивающие. Например, предполагается, что некоторые или все такие компоненты аппаратного обеспечения, программного обеспечения и программно-аппаратного обеспечения могли бы быть реализованы исключительно в аппаратном обеспечении, исключительно в программном обеспечении или в любом сочетании аппаратного обеспечения и программного обеспечения. Таким образом, хотя ниже описаны примеры способов и устройства, приведенные примеры представляют собой не единственный способ реализации таких способов и устройства.
[0033] Обычно в системе управления процессами контроллер (например, электропневматический контроллер) напрямую соединен с устройством управления процессом (такие устройства также попеременно упоминаются в настоящем описании как “устройства управления” или “полевые устройства”, например, регулировочные клапаны, насосы, демпферы и т.д.). Датчик положения, соединенный с устройством управления, может измерять перемещение устройства управления или привода, соединенного с устройством управления, и может выдавать по проводному или беспроводному соединению сигнал обратной связи, характеризующий положение или состояние устройства управления, на контроллер устройства управления. Кроме того, с устройством управления может быть соединено диагностическое устройство, при этом диагностическое устройство может обнаруживать постороннее или избыточное перемещение или вибрацию устройства управления, а также вырабатывать предупредительный или аварийный сигнал при выявлении таких неблагоприятных условий. Диагностическое устройство может представлять собой, например, диагностическое устройство малой мощности.
[0034] Раскрытые способы, системы и устройства, имеющие диагностические устройства (в частности, имеющие диагностические устройства малой мощности), ниже описаны в сочетании с иллюстративными примерами, предполагающими использование электропневматического цифрового контроллера клапана и клапана с пневматическим приводом. Однако само собой разумеется, что эти примеры не носят ограничительного характера. В действительности раскрытые способы и устройство могут быть реализованы с контроллерами других типов, с клапанами, приводимыми в действие другими способами, и/или с устройствами управления процессом, отличными от клапанов.
[0035] На ФИГ. 1 показана блок-схема примера системы 1 управления процессами, в состав которой входит система 2 управления и зона 4 управления процессом. Система 1 управления процессами может входить в состав технологической установки, такой как нефтяная, химическая и/или другая промышленная технологическая установка, при этом система 1 управления процессами может управлять одним или несколькими процессами, осуществляемыми технологической установкой. Система 2 управления может включать в себя рабочие станции, контроллеры, коммуникационные стойки, входные/выходные платы и/или любые другие исполнительные компоненты системы управления процессами (на ФИГ. 1 не показаны). В некоторых технологических установках система 2 управления располагается не в зоне 4 управления процессом, а, например, в закрытом помещении, чтобы экранировать систему 2 управления от шума, пыли, тепла и другим нежелательных условий окружающей среды. Система 2 управления может находиться в коммуникативном соединении с контроллером 20, например, электропневматическим контроллером, расположенным в зоне 4 управления процессом. Система 2 управления может подавать питание на контроллер 20, или же контроллер 20 может получать питание от локального источника энергии, такого как внешний источник напряжения, источник солнечной энергии, батарея питания, конденсатор и т.д.
[0036] Контроллер 20 может включать в себя коммуникационный интерфейс или вход 22, посредством которого можно получать сигналы от системы 2 управления и/или отправлять сигналы в систему 2 управления по одному или нескольким каналам 10 связи. Один или несколько каналов 10 связи могут включать в себя проводной канал связи, беспроводной канал связи, а также как проводной, так и беспроводной каналы связи. Таким образом, интерфейс 22 может представлять собой проводной интерфейс, беспроводной интерфейс, а также как проводной, так и беспроводной интерфейс. Интерфейс 22 может быть выполнен с возможностью обмена данными с главным компьютером управления, другими контроллерами и/или другими элементами, входящими в состав системы 2 управления. В одном варианте осуществления интерфейс 22 выполнен с возможностью обмена данными с другими контроллерами и/или элементами, включенными в зону 4 управления процессом.
[0037] В одном варианте осуществления интерфейс 22 может принимать от системы 2 управления сигналы управления по каналам 10, задающие требуемое состояние клапана или относящиеся к требуемому состоянию клапана в отношении клапана или устройства 30 управления, расположенного в зоне 4 управления процессом. Например, сигналы управления, полученные электропневматическим контроллером 20 с помощью интерфейса 22, могут привести в действие пневматический привод 31, соединенный с клапаном 30, для открытия, закрытия или перемещения в некоторое промежуточное положение.
[0038] Следует отметить, что хотя на ФИГ. 1 электропневматический контроллер 20 и устройство 30 управления процессом расположены в пределах зоны 4 управления процессом, в некоторых конфигурациях как электропневматический контроллер 20, так и устройство 30 управления процессом могут располагаться в соответствующей иной рабочей среде и соединяться друг с другом с возможностью связи посредством одного или нескольких проводных и/или беспроводных каналов связи, например, посредством беспроводных каналов связи, входящих в состав беспроводной сети связи технологической установки или управляющей среды 1. Например, устройство 30 управления процессом может располагаться в среде с относительно высокой температурой и высокой влажностью (например, влажностью 90% при температуре 180 градусов по Фаренгейту (° F)) (82 градуса по Цельсию (° С)), в то время как электропневматический контроллер 20 находится в контролируемой среде с влажностью 10% и температурой 72°F (22° С).
[0039] Так или иначе, сигналы управления (например, входные сигналы), поступившие на интерфейс 22, могут включать в себя, например, сигнал 4-20 мА, сигнал напряжения постоянного тока 0-10 (VDC), беспроводной сигнал и/или цифровые команды и т.д. Например, если сигнал управления представляет собой сигнал 4-20 мА, может использоваться протокол цифровой передачи данных, такой как, например, широко известный протокол HART (магистральный адресуемый дистанционный преобразователь) (HART®), для сообщения по проводному соединению 10 с электропневматическим контроллером 20. В другом примере сигнал управления может представлять собой беспроводной сигнал управления, полученный по беспроводному каналу 10 с использованием протокола WirelessHART. В других примерах сигнал управления может представлять собой сигнал 0-10 VDC или сигнал другого типа. Такая цифровая связь может использоваться системой 2 управления для извлечения идентификационной информации, информации о статусе работы, а также диагностической информации из электропневматического контроллера 20. Дополнительно или в качестве альтернативы такая цифровая связь может использоваться системой 2 управления для осуществления управления клапаном 30 посредством соответствующего контроллера 20.
[0040] Приведенный в качестве примера электропневматический контроллер 20, представленный на ФИГ. 1, может управлять положением привода 31, а значит, положением клапана 30. Электропневматический контроллер 20 может включать в себя, хотя и не показано, блок управления, электропневматический (I/P) преобразователь, а также пневматическое реле. В других примерах электропневматический контроллер 20 может включать в себя любые другие компоненты регулировки и/или подачи давления на привод 31 клапана. Кроме того, электропневматический контроллер 20 может включать в себя другие компоненты для обработки сигналов, такие как аналого-цифровые преобразователи, фильтры (например, фильтры нижних частот, фильтры верхних частот и цифровые фильтры), усилители и т.д. Например, сигнал управления, полученный от системы 2 управления, может подвергаться фильтрации (например, с помощью полосового фильтра) до его обработки блоком управления в электропневматическом контроллере 20.
[0041] Более точно, электропневматический контроллер 20 может управлять положением привода 31 путем сравнения сигнала обратной связи или позиционного сигнала, характеризующего положение клапана, когда сигнал получен по проводному или беспроводному каналу 12 связи. Например, в случае пневматически активируемого клапана сигнал обратной связи может представлять собой токовый сигнал обратной связи, соответствующий положению клапана согласно результатам измерения или определения, выполненного датчиком 32 положения. В некоторых конфигурациях токовый сигнал обратной связи, соответствующий положению клапана, может передаваться в контроллер по проводному или беспроводному соединению 12, при этом положение клапана 30 может рассчитываться контроллером 20, например, на основе дифференциала напряжения на резисторе на двух входах контроллера.
[0042] В некоторых конфигурациях сигнал обратной связи или позиционный сигнал, вырабатываемый датчиком 32 положения, может содержать в себе указание на положение клапана. Иными словами, указание на положение клапана может выдаваться датчиком 32 положения тем же способом, который описан в заявке на патент США No. 14/086,102 под заголовком “Wireless Position Transducer for a Valve”, зарегистрированной 21 ноября 2013 г., полное содержание которой включено в настоящее описание путем ссылки. Например, датчик 32 обратной связи или положения может представлять собой беспроводной позиционный преобразователь или датчик, вырабатывающий беспроводной сигнал обратной связи согласно протоколу Zigbee, Bluetooth, Wi-Fi, сверхширокому (UWB), инфракрасному (IR), какому-либо иному пригодному протоколу беспроводной связи малого радиуса действия либо протоколу беспроводной связи ближнего радиуса действия (NFC). В некоторых вариантах осуществления беспроводной позиционный сигнал обратной связи может соответствовать протоколу WirelessHART. Так или иначе, сигнал обратной связи может включать в себя данные или величину, характеризующую текущее положение клапана 31, при этом сигнал обратной связи может передаваться от датчика 32 в контроллер 20 по одному или нескольким беспроводным каналам 12 связи. В некоторых конфигурациях сигнал 12 обратной связи, вырабатываемый датчиком 32 положения и содержащий в себе указание на положение клапана 30, может передаваться в контроллер 20 по проводному каналу 12 связи.
[0043] Позиционный сигнал обратной связи, вырабатываемый позиционным преобразователем или датчиком 32, может приниматься электропневматическим контроллером 20 на втором коммуникационном интерфейсе или входе 24, соединенном с каналами 12. Интерфейс 24 может включать в себя беспроводной приемопередатчик, беспроводной приемник или проводной интерфейс. Электропневматический контроллер 20 может идентифицировать сигнал обратной связи по сигналу обратной связи или позиционного сигнала, полученного от позиционного преобразователя 32 через второй интерфейс 24. В одном варианте осуществления первый интерфейс 22 и второй интерфейс 24 могут быть объединены в один интерфейс.
[0044] Электропневматический контроллер 20 может дополнительно включать в себя блок управления или процессор (не показан), соединенный с запоминающим устройством (также не показано), с входами 22 и 24, а также с выходом 25. Память контроллера может представлять собой материальное некратковременное запоминающее устройство и может включать в себя один или несколько компьютерочитаемых носителей информации. Например, память контроллера может быть реализована в виде одного или нескольких полупроводниковых запоминающих устройств, запоминающих устройств с магнитным считыванием, запоминающих устройств с оптическим считыванием и/или любых других пригодных материальных некратковременных компьютерочитаемых носителей информации. Память контроллера может хранить выполняемые компьютером инструкции, которые выполняются процессором-контроллером для нахождения на основе полученного позиционного сигнала от второго интерфейса 24 и полученного сигнала управления от первого интерфейса 22 величины управляющего сигнала, который требуется передать через выход 25 на регулировочный клапан 30. Например, выполняемые компьютером инструкции для определения управляющего сигнала содержат алгоритм или способ управления положением, загружаемый в процессе конфигурирования и/или в режиме реального времени из системы 2 управления.
[0045] В частности, сигнал управления, выдаваемый системой 2 управления, может использоваться электропневматическим контроллером 20 в качестве установочного или опорного сигнала, соответствующего требуемой операции, выполняемой клапаном 30 (например, требуемому положению, соответствующему доле рабочего диапазона регулировочного клапан 30). Блок управления (не показан) в электропневматическом контроллере 20 может сравнивать позиционный сигнал обратной связи с сигналом 10 управления, используя сигнал 10 управления и сигнал обратной связи в качестве величин в алгоритме или способе управления положением для определения управляющей величины. Способ управления положением, осуществляемый блоком управления, может определить (например, рассчитать) управляющую величину на основе разности между сигналом обратной связи и сигналом 10. В одном варианте осуществления эта вычисленная разность соответствует количественной величине, на которую электропневматический контроллер 20 должен изменить положение привода 31, соединенного с клапаном 30. В одном варианте осуществления вычисленная управляющая величина также соответствует току, вырабатываемому блоком управления, чтобы привести в действие I/P преобразователь в электропневматическом контроллере 20 для создания пневматического давления. Например, электропневматический контроллер 20 выдает управляющий сигнал через выход 25 на регулировочный клапан 30.
[0046] В одном варианте осуществления I/P преобразователь в электропневматическом контроллере 20 входит в состав выхода 25. I/P преобразователь может представлять собой преобразователь «ток-давление», вырабатывающий магнитное поле на основе тока, пропускаемого через соленоид. Соленоид может магнитным способом управлять заслонкой, которая приводится в движение относительно сопла, чтобы изменять ограничение потока через сопло/заслонку с целью создания пневматического давления, изменяющегося на основе среднего тока, проходящего через соленоид. Такое пневматическое давление может быть усилено посредством пневматического реле и приложено к приводу 31, соединенному с клапаном 30. Пневматическое реле в электропневматическом контроллере 20 может быть пневматически соединено с приводом 31 для создания привода 31, использующего пневматическое давление (не показано).
[0047] Например, управляющая величина, увеличивающая ток, вырабатываемый блоком управления в электропневматическом контроллере 20, может привести в действие пневматическое реле для увеличения пневматического давления, прикладываемого к пневматическому приводу 31, чтобы привести в действие привод 31 для расположения клапана 30 ближе к закрытому положению. Точно так же управляющие величины, уменьшающие ток, вырабатываемый блоком управления, могут привести в действие пневматическое реле для уменьшения пневматического давления, прикладываемого к пневматическому приводу 31, чтобы привести в действие привод 31 для расположения клапана 30 ближе к открытому положению.
[0048] В других примерах выход 25 электропневматического контроллера 20 может включать в себя преобразователь напряжения в давление, и в этом случае управляющий сигнал представляет собой напряжение, которое изменяется для создания изменяющегося давления на выходе для управления клапаном 30. Кроме того, другие примеры выходных сигналов могут использоваться для других типов текучих сред под давлением, в число которых входят сжатый воздух, гидравлическая жидкость и т.д.
[0049] Если обратиться к примеру клапана 30 по ФИГ. 1, в одном варианте осуществления клапан 30 может включать в себя седло клапана, образующее отверстие, обеспечивающее проход для потока текучей среды между входным каналом и выходным каналом. Клапан 30 может представлять собой, например, поворотный клапан, клапан с поворотом на четверть оборота, клапан с электроприводом, демпфер или любое другое устройство управления или устройство. Пневматический привод 31, соединенный с клапаном 30, может быть функционально связан со звеном управления потоком посредством штока клапана, перемещающего звено управления потоком в первом направлении (например, от седла клапана), чтобы позволить потоку текучей среды проходить между входным каналом и выходным каналом, а также во втором направлении (например, в направлении седла клапана), чтобы ограничить или исключить поток текучей среды между входным каналом и выходным каналом. Привод 31, соединенный с приведенным в качестве примера клапаном 30, может включать в себя поршневой привод двухстороннего действия, мембранный или поршневой привод с пружинным возвратом одностороннего действия, а также любой другой пригодный привод либо устройство управления процессом. Для регулировки скорости потока через клапан 30 клапан 30 может быть соединен с позиционным преобразователем или датчиком 32.
[0050] Кроме того, как показано на ФИГ. 1, с клапаном 30 может быть физически соединено устройство 40 для диагностики клапана 30 (например, диагностическое устройство 40). Например, соединитель или соединительный механизм 42 может физически присоединять или крепить диагностическое устройство 40 к штоку или приводу клапана 30. Соединитель или соединительный механизм 42 могут частично или полностью входить в состав диагностического устройства 40, либо соединитель 42 может представлять собой компонент, отделенный от диагностического устройства 40.
[0051] Подробная блок-схема диагностического устройства 40 изображена на ФИГ. 2. Как показано на ФИГ. 2, диагностическое устройство 40 может включать в себя акселерометр 45, чувствительный к движению клапана 30, например, к движению штока или привода, к которому крепится диагностическое устройство 40. Например, акселерометр 45 может представлять собой акселерометр на базе микроэлектромеханических систем (MEMS), такой как многоосевой MEMS-акселерометр (например, трехосевой MEMS-датчик, или другой пригодный многоосевой акселерометр), который чувствителен к многоосевому движению или вибрации клапана 30 (или частей клапана 30).
[0052] В варианте осуществления, показанном на ФИГ. 2, акселерометр 45 диагностического устройства 40 может представлять собой интеллектуальный акселерометр малой мощности, включающий в себя один или несколько преобразователей 48a-48n, соответствующих одной или нескольким пространственным осям (например, преобразователи по X-оси, Y-оси и Z-оси), выходной коммуникационный интерфейс 50 для передачи выходного сигнала с акселерометра 45, а также процессор 52, который может представлять собой процессор цифровых сигналов или иной пригодный процессор. Процессор 52 акселерометра может включать в себя (например, может хранить и выполнять) одну или несколько заложенных функций, последовательностей действий, программ или инструкций 55a-55m, по меньшей мере некоторые из которых могут поддаваться настройке пользователем. В диагностическом устройстве 40 по ФИГ. 2 по меньшей мере одна из упомянутых функций 55a-55m может поддаваться настройке или программированию, чтобы обнаружить или измерить величину текущего движения или вибрации клапана 30 (или части клапана 30, к которой крепится диагностическое устройство 40) на основе выходных сигналов преобразователей 48a-48n, а также определить, что величина обнаруженного движения или вибрации превышает конкретную или заданную пороговую величину или пороговое значение T. Пороговая величина T может храниться, например, полностью в акселерометре 45 (например, в процессоре 52 акселерометра либо в каком-то другом запоминающем устройстве акселерометра 45, как показано на ФИГ. 2), либо пороговая величина T может храниться в ином запоминающем устройстве диагностического устройства 40, доступном процессору 52 акселерометра (не показано). Пороговая величина T может поддаваться настройке или изменению, например, пользователем диагностического устройства 40. Например, пороговая величина T может настраиваться на различные значения для разных типов обследуемых устройств 30 управления и/или для разных рабочих условий.
[0053] Когда акселерометр 45 определяет, что величина движения или вибрации клапана 30 превышает пороговую величину T, акселерометр 45 может вызвать активацию модуля 58 связи, входящего в состав диагностического устройства 40. Модуль 58 связи может активироваться из состояния с отключенным питанием, либо модуль 58 связи может активироваться из состояния сна или другого состояния энергосбережения. В некоторых вариантах осуществления акселерометр 45 может вызвать активацию модуля 58 связи путем отправки первого сигнала в процессор 60, входящий в состав диагностического устройства 40 и расположенный с возможностью связи между акселерометром 45 и модулем 58 связи. При приеме первого сигнала, процессор 60 диагностического устройства может отправить второй сигнал для активации модуля 58 связи. В некоторых конфигурациях первый сигнал, отправленный с акселерометра 45 в процессор 60 диагностического устройства, активирует процессор 60 диагностического устройства, выводя из состояния с отключенным питанием, сна или состояния энергосбережения, при этом после активации процессор 60 диагностического устройства может отправить второй сигнал для активации модуля 58 связи.
[0054] В некоторых вариантах осуществления диагностического устройства 40 процессор 60 может отсутствовать или исключаться из состава. Иными словами, диагностическое устройство 40 может вовсе не включать в себя какой-либо процессор 60 в качестве своей составной части. В этих вариантах осуществления акселерометр 45 может вызывать активацию модуля 58 связи путем отправки сигнала непосредственно в модуль 58 связи, как отмечено ссылочной позицией 62, иными словами, акселерометр 45 и модуль 58 связи могут быть непосредственно связаны.
[0055] Так или иначе, после получения сигнала для активации модуль 58 связи может «проснуться» или активироваться и может осуществить передачу одного или нескольких сигналов 65 с диагностического устройства 40 на одно или несколько устройств-адресатов. Каждый сигнал 65 может указывать на то, что величина обнаруженного движения или вибрации клапана 30 (или части клапана 30, к которой крепится диагностическое устройство 40) превышает пороговую величину T, а потому попеременно упоминается в настоящем описании как диагностический сигнал, аварийный сигнал, выходной сигнал или сигнал 65 предупреждения. Вообще аварийный сигнал 65 может указывать на постороннее или избыточное перемещение или чрезмерную вибрацию клапана 30. В некоторых случаях аварийный сигнал 65 может включать в себя иную информацию, такую как величина, характеризующая величину движения или вибрации, метка времени и т.д. Другая информация может вырабатываться, например, процессором 52 акселерометра и/или может вырабатываться процессором 60 диагностического устройства.
[0056] Модуль 58 связи может осуществлять передачу одного или нескольких аварийных сигналов 65 с устройства 40 через один или несколько проводных или беспроводных коммуникационных интерфейсов. В число примеров беспроводных коммуникационных интерфейсов, через которые аварийный сигнал 65 может передаваться с диагностического устройства 40, входят беспроводные коммуникационные интерфейсы, поддерживающие протокол Zigbee, Bluetooth, Wi-Fi, сверхширокий (UWB), инфракрасный (IR), WirelessHART, беспроводной связи ближнего радиуса действия (NFC) и/или иной пригодный протокол беспроводной связи малого радиуса действия. В число примеров проводных коммуникационных интерфейсов, через которые аварийный сигнал 65 может передаваться с диагностического устройства 40, входят проводные коммуникационные интерфейсы, поддерживающие специализированный протокол связи для управления процессом, такой как FOUNDATION® Fieldbus, PROFIBUS, DeviceNet (система связи, основанная на CAN), HART® (магистральный адресуемый дистанционный преобразователь) и т.д., и/или протокол связи общего назначения, такой как Ethernet или IP (межсетевой протокол Internet).
[0057] Кроме того, аварийный сигнал 65 может передаваться с диагностического устройства 40 на одно или несколько других устройств-адресатов, работающих в среде управления процессами или установке 1 либо в сочетании с ней. Например, аварийный сигнал 65 может передаваться с диагностического устройства 40 в контроллер 20, другой контроллер, главный компьютер системы управления, архивное хранилище данных, анализатор, локальный или удаленный пользовательский интерфейс, внешнее вычислительное устройство и т.д. В некоторых конфигурациях аварийный сигнал 65 может передаваться с диагностического устройства 40 на сопряженное устройство 68, которое, в свою очередь, может пересылать аварийный сигнал 65 (или его эквивалент) на одно или несколько других устройств-адресатов 70a-70p, работающих в среде управления процессами или установке 1 либо в сочетании с ней (например, контроллер 20, другой контроллер, главный компьютер системы управления, архивное хранилище данных, анализатор, локальный или удаленный пользовательский интерфейс, внешнее вычислительное устройство и т.д.). Например, сопряженное устройство 68 может использоваться в качестве узла пересылки, чтобы способствовать поддержанию мощности сигнала и непрерывности передачи сигналов. В некоторых случаях единственное сопряженное устройство 68 может пересылать множество различных аварийных сигналов 65 (или их эквивалентов) на одно или несколько соответствующих устройств-адресатов 70a-70p. В некоторых случаях различные аварийные сигналы 65 могут вырабатываться множеством различных диагностических устройств 40, прикрепленных соответственно к множеству различных устройств 30 управления.
[0058] Кроме того, протокол, посредством которого сопряженное устройство 68 принимает аварийный сигнал 65 с диагностического устройства 40, и протокол, посредством которого сопряженное устройство 68 пересылает соответствующую аварийную информацию, могут представлять собой один и тот же проводной или беспроводной протокол связи, либо могут быть разными проводными и/или беспроводными протоколами связи. В некоторых вариантах осуществления сопряженное устройство 68 может объединять информацию, поступившую из множества различных аварийных сигналов 65, полученных от множества различных диагностических устройств 40, в единственное выходное сообщение или сигнал.
[0059] Возвращаясь к диагностическому устройству 40, следует отметить, что диагностическое устройство 40 может включать в себя вход или соединение 72, по которому поступает питание от локального источника питания или устройства 75 для хранения энергии и/или устройства 78 для сбора энергии для запитывания одного или нескольких компонентов диагностического устройства 40. Например, акселерометр 45, процессор 60 и/или модуль 58 связи могут получать питание от локального источника питания или устройства 75 для хранения энергии. В некоторых вариантах осуществления локальный источник питания или устройство 75 для хранения энергии может входить в состав диагностического устройства 40, образуя единый блок. В некоторых вариантах осуществления локальный источник питания или устройство 75 для хранения энергии является подзаряжаемым. Например, локальный источник питания или устройство 75 для хранения энергии может представлять собой батарею, конденсатор, или другое подзаряжаемое устройство для хранения энергии, при этом для подзарядки локального источника питания или устройства 75 для хранения энергии может использоваться любая известная технология, например улавливание солнечной энергии; замена батареи; сбор или восстановление энергии, используя локальный нагрев, вибрацию и/или перемещение; временное подсоединение к источнику со штепсельным разъемом, например источнику питания переменного тока; индуктивная подзарядка с помощью бесконтактного зарядного устройства; или иная пригодная технология подзарядки. На ФИГ. 1 устройство 75 для хранения энергии соединено с устройством 78 для сбора энергии, осуществляющим сбор энергии с диагностического устройства 40, клапана 30 и/или других источников, расположенных поблизости, для подзарядки устройства 75 для хранения энергии. Например, устройство 78 для сбора энергии может осуществлять сбор энергии, образуемой от движения клапана 30 и/или других элементов или частей диагностического устройства 40 (например, с акселерометра 45), и может хранить собранную энергию в устройстве 75 для хранения энергии. В некоторых конфигурациях устройство 78 для сбора энергии может входить в состав диагностического устройства 40, образуя единый блок.
[0060] Варианты осуществления диагностического устройства 40 обеспечивают множество преимуществ над известными в настоящее время диагностическими устройствами. Как обсуждалось ранее, известные в настоящее время диагностические устройства потребляют значительно больше энергии, чем диагностическое устройство 40, поскольку этим известным устройствам обычно требуется процессор для периодического и/или непрерывного запроса информации или опроса акселерометра либо другого датчика с целью получения данных о движении/вибрации обследуемого устройства управления, даже когда величины движения/вибрации лежат в приемлемом, не вызывающем опасений диапазоне. В действительности для некоторых известных диагностических устройств осуществляется непрерывная подача энергии и на другие компоненты в дополнение к процессору. С другой стороны, потребность в энергии или рабочие циклы диагностического устройства 40 значительно сокращены по сравнению с известными в настоящее время диагностическими устройствами, поскольку диагностическое устройство 40 или его части активируются, «просыпаются» или полностью запитываются только тогда, когда величины движения и/или вибрации обследуемого устройства 30 управления процессом превышают пороговую величину T, соответствующую состоянию опасности. В действительности в некоторых вариантах осуществления всего лишь сбор энергии, вырабатываемой механическим перемещением устройства 30 управления (например, осуществляемый устройством 78 для сбора энергии), может предоставить достаточное количество энергии диагностическому устройству 40 для его работы, не требуя какого-либо дополнительного запаса энергии. В этих вариантах осуществления устройство 75 для хранения энергии может отсутствовать, при этом устройство 78 для сбора энергии может напрямую снабжать энергией акселерометр 45, модуль 58 связи и/или другие компоненты диагностического устройства 40 через вход или соединение 72. Таким образом, в этих вариантах осуществления не только сберегается энергия, но также можно уменьшить размер, вес и число компонентов диагностического устройства 40 по сравнению с тем, что требуется для известных в настоящее время диагностических устройств.
[0061] Кроме того, в некоторых вариантах осуществления размер, вес и число компонентов диагностического устройства 40 можно дополнительно уменьшить по сравнению с тем, что требуется для известных в настоящее время диагностических устройств, отказавшись от процессора 60. Например, акселерометр 45 может напрямую выдавать аварийный сигнал 65 (или может напрямую выдавать содержимое аварийного сигнала 65) на модуль 58 связи (ссылочная позиция 62), чтобы активировать модуль 58 связи, при этом после активации модуль 58 связи осуществляет передачу аварийного сигнала 65 с диагностического устройства 40. В другом примере акселерометр 45 может просто запускать модуль 58 связи, когда величина распознанного движения/распознанной вибрации превышает пороговую величину T, соответствующую состоянию опасности, при этом после получения пускового сигнала модуль 58 связи может передать аварийный сигнал 65, априори запрограммированный или жестко закодированный в модуле 58 связи.
[0062] На ФИГ. 3 показан пример сети 100 управления процессом, в которую может быть встроено диагностическое устройство 40 по ФИГ. 1. В одном варианте осуществления сеть 100 управления процессом входит в состав системы 1 управления, представленной на ФИГ. 1. Сеть 100 может включать в себя сеть 112 автоматизации установки и сеть 114 передачи данных. На ФИГ. 1 сеть 114 передачи данных представлена в виде беспроводной многосвязной сети передачи данных. Например, сеть 114 передачи данных может поддерживать беспроводной протокол HART (магистральный адресуемый дистанционный преобразователь), например “беспроводной сети HART”. В некоторых вариантах осуществления сети 100, однако, сеть 114 передачи данных может поддерживать проводной протокол HART, например “проводной сети HART”, или другой проводной специализированный протокол связи для управления процессом (например, FOUNDATION, Fieldbus, PROFIBUS, DeviceNet, HART и т.д.). В некоторых вариантах осуществления в состав сети 100 могут входить как проводная, так и беспроводная сеть 114.
[0063] Сеть 112 автоматизации установки может включать в себя одну или несколько стационарных рабочих станций 116, а также одну или несколько переносных рабочих станций 118, соединенных через магистральную линию 120 связи. Рабочие станции 116, 118 в настоящем описании попеременно именуются как “рабочие станции”, “главные компьютеры системы управления”, “главные компьютеры управления” или “главные компьютеры” сети 100 управления процессом. Магистральная линия 120 может быть реализована посредством протокола Ethernet, RS-485, Profibus DP или другого пригодного протокола проводной и/или беспроводной связи.
[0064] Сеть 112 автоматизации установки и беспроводная сеть 114 HART могут соединяться через шлюз 122. В одном варианте осуществления шлюз 122 может соединяться с магистральной линией 120 проводным способом и может обмениваться данными с сетью 112 автоматизации установки, используя любой пригодный известный протокол. Шлюз 122 может быть реализован в виде отдельного устройства, карты, вставляемой в гнездо расширения главных компьютеров или рабочих станций 116 и 118, или в виде части IO подсистемы PLC- или DCS-системы, либо любым другим способом. Шлюз 122 может предоставлять приложениям, прогон которых осуществляется по сети 112, доступ к различным сетевым устройствам беспроводной сети 114 HART. В дополнение к преобразованию протоколов и команд шлюз 122 может обеспечивать тактовую синхронизацию, используемую временными слотами и суперфреймами (наборами временных слотов связи, эквидистантно разнесенных во времени) схемы диспетчеризации беспроводной сети 114 HART.
[0065] В некоторых случаях сети могут иметь более одного шлюза 122. Данное множество шлюзов может использоваться для повышения производительности и надежности сети путем предоставления дополнительной полосы пропускания для обмена информацией между беспроводной сетью HART и сетью 112 автоматизации установки или внешним миром. С другой стороны, шлюзовое устройство 122 может запрашивать полосу пропускания от надлежащего сетевого сервиса в соответствии с потребностями шлюза по передаче данных в беспроводной сети HART. Шлюз 122 дополнительно может выполнять переоценку необходимой полосы пропускания, пока система функционирует. Например, шлюз 122 может получить запрос от главного компьютера, находящегося вне беспроводной сети 114 HART, на извлечение большого объема данных. Шлюзовое устройство 122 может далее запросить дополнительную полосу пропускания от специализированного сервиса, такого как устройство управления сетью, чтобы выполнить данную транзакцию. После выполнения этой транзакции шлюз 122 далее может отправить запрос на отключение данной ненужной полосы пропускания.
[0066] В некоторых вариантах осуществления шлюз 122 функционально разделен на виртуальный шлюз 124 и одну или несколько точек 125a, 125b доступа к сети. Точки 125a, 125b доступа к сети могут представлять собой отдельные физические устройства, осуществляющие обмен информацией по проводному каналу связи со шлюзом 122, чтобы увеличить полосу пропускания и общую надежность беспроводной сети 114 HART. Однако, хотя на ФИГ. 1 показано проводное соединение 26 между физически отдельными шлюзом 122 и точками 125a, 125b доступа, следует понимать, что элементы 122-126 могут также быть созданы в виде единого устройства. Поскольку точки 125a, 125b доступа к сети могут быть физически отдельными от шлюзового устройства 122, каждая из точек 125a, 125b доступа из стратегических соображений может быть помещена в нескольких отдельных мест. В дополнение к увеличению полосы пропускания множество точек 125a, 125b доступа могут повысить общую надежность сети, компенсируя потенциально возможное низкое качество сигнала в одной точке доступа путем восполнения в одной или нескольких других точках доступа. Наличие множества точек 125a, 125b доступа также обеспечивает резерв на случай возникновения неисправности в одной или нескольких точках 125a, 125b доступа.
[0067] Шлюзовое устройство 122 может дополнительно содержать программный модуль 127 устройства управления сетью (например, “устройство управления сетью”), а также программный модуль 128 устройства обеспечения безопасности (например, “устройство обеспечения безопасности”). В другом варианте осуществления устройство 127 управления сетью и/или устройство 128 обеспечения безопасности могут работать на одном из главных компьютеров 116, 118 управления сети 112 автоматизации установки. Например, устройство 127 управления сетью может работать на главном компьютере 116, а устройство 128 обеспечения безопасности может работать на главном компьютере 118. Устройство 127 управления сетью может отвечать за конфигурацию сети 114; установление очередности обмена информацией между устройствами, входящими в состав сети 114, такими как беспроводные HART-устройства (т.е. задание конфигурации суперфреймов); определение графика работы сети связи и осуществление доставки по меньшей мере его частей в устройства-получатели информации и контроллеры; составление таблиц маршрутизации; а также мониторинг технического состояния беспроводной сети 114 HART и сообщение информации о нем. Поскольку осуществляется поддержка резервированных устройств 127 управления сетью, предполагается, что должно использоваться только одно активное устройство 127 управления сетью, приходящееся на одну беспроводную сеть 114 HART. В одном возможном варианте осуществления устройство 127 управления сетью анализирует информацию, относящуюся к схеме сети, функциональным возможностям и скорости обновления каждого сетевого устройства, а также другую релевантную информация. Устройство 127 управления сетью затем может определять маршруты и режимы обмена информацией между сетевыми устройствами с учетом этих факторов. В одном варианте осуществления устройство 127 управления сетью может входить в состав одного из главных компьютеров 116, 118 управления.
[0068] Как опять же показано на ФИГ. 3, беспроводная сеть 114 HART может включать в себя одно или несколько полевых устройств или устройств 130-140 управления. Вообще системы управления процессами, подобные тем, что используются на химических, нефтяных или других технологических установках, включают в себя такие полевые устройства, как клапаны, установочные приспособления клапанов, переключатели, датчики (например, датчики температуры, давления и расхода), насосы, вентиляторы и т.д. Полевые устройства могут выполнять функции управления процессом в технологической операции, контролируемой сетью 100 управления процессом. Функция управления процессом может включать в себя, например, открытие или закрытие клапанов и/или мониторинг или замеры параметров процесса. В беспроводной HART-сети 114 связи HART-полевые устройства 130-140 являются производителями и потребителями пакетов в беспроводной сети HART.
[0069] Внешний главный компьютер 141 может соединяться с внешней сетью 143, которая, в свою очередь, может соединяться с сетью 112 автоматизации установки посредством маршрутизатора 144. Внешняя сеть 143 может представлять собой, например, «Всемирную паутину» (WWW). Хотя внешний главный компьютер 141 не принадлежит ни к сети 112 автоматизации установки, ни к беспроводной сети 114 HART, внешний главный компьютер 141 может иметь доступ к устройствам в обеих сетях 112, 114 через маршрутизатор 144. Соответственно сеть 114 связи и сеть 112 автоматизации установки системы 100 управления процессами могут представлять собой частные сети, так что доступ к сетям 112, 114 обеспечивается защитой. Например, устройства, стремящиеся подсоединиться к сети 112 и/или сети 114, могут потребовать авторизации. Точно так же внешний главный компьютер 141 может контролировать защиту сетевого доступа для обмена информацией по отношению к внешней сети 143.
[0070] Беспроводная сеть 114 HART может использовать протокол, обеспечивающий те же рабочие характеристики, с которыми сталкиваются при работе с устройствами проводной сети HART. Приложения этого протокола могут включать в себя мониторинг данных процесса, мониторинг критических данных (с более жесткими требованиями к показателям работы), калибровку, определение статуса устройства и диагностический мониторинг, поиск неисправностей полевых устройств, пуско-наладочные работы, а также управление процессом в супервизорном режиме. Данные приложения требуют, чтобы беспроводная сеть 114 HART использовала протокол, способный обеспечить быстрое обновление, когда это необходимо, перемещать большие объемы данных, когда это требуется, а также поддерживать сетевые устройства, которые подсоединяются к беспроводной сети 114 HART лишь временно для проведения пуско-наладочных работ и технического обслуживания.
[0071] В одном варианте осуществления беспроводной протокол, поддерживающий сетевые устройства беспроводной сети 114 HART, представляет собой расширение протокола HART, широко используемый отраслевой стандарт, который сохраняет простую последовательность операций и технологические приемы для проводной среды. Беспроводной протокол HART может использоваться для установления стандарта в области беспроводной связи для технологических приложений и может дополнительно расширить применение связи по протоколу HART и предоставляемые ею преимущества в промышленности путем совершенствования HART-технологии с целью поддержки беспроводных приложений для автоматизации процессов.
[0072] Возвращаясь к ФИГ. 3, полевые устройства или устройства 130-136 управления могут представлять собой беспроводные HART-устройства. Другими словами, полевое устройство 130, 132a, 132b, 134 или 136 может быть создано в виде единого блока, поддерживающего все уровни стека беспроводных протоколов HART. В сети 100 полевое устройство 130 может представлять собой измеритель потока с беспроводным HART-протоколом, полевое устройство 132b может представлять собой датчики давления с беспроводным HART-протоколом и полевое устройство 136 может представлять собой датчик давления с беспроводным HART-протоколом.
[0073] В частности, полевое устройство 134 может представлять собой клапан или установочное приспособление клапана, в состав которого входит датчик положения (например, датчик 32 положения по ФИГ. 1), при этом полевое устройство 132a может представлять собой контроллер (например, контроллер 20 по ФИГ. 1), принимающий информацию об измеренном положении от датчика положения полевого устройства 134. В одном варианте осуществления главный компьютер 116 управления и/или главный компьютер 118 управления принимают по меньшей мере некоторые указания на положение от полевого устройства 134, например, посредством беспроводной многосвязной сети 114 связи, шлюза 122, и сети 120 автоматизации установки. Кроме того, диагностическое устройство (например, диагностическое устройство 40 по ФИГ. 1 и 2) может быть соединено с полевым устройством 134 для диагностики посторонних или избыточных движений или вибраций полевого устройства 134.
[0074] В некоторых конфигурациях беспроводная сеть 114 HART может включать в себя маршрутизаторное устройство 160. Маршрутизаторное устройство 160 может представлять собой сетевое устройство, пересылающее пакеты из одного сетевого устройства в другое. Сетевое устройство, действующее в качестве маршрутизаторного устройства, может использовать внутренние таблицы маршрутизации для принятия решения, на какое сетевое устройство оно должно переслать конкретный пакет. Обособленные маршрутизаторы, такие как маршрутизатор 160, могут не требоваться в тех вариантах осуществления, где все устройства в беспроводной сети 114 HART поддерживают маршрутизацию. Однако может быть полезным (например, для расширения сети или для экономии энергии полевого устройства в сети) добавить к сети специализированный маршрутизатор 160.
[0075] Все устройства, напрямую подсоединенные к беспроводной сети 114 HART, могут называться сетевыми устройствами. В частности, беспроводные HART-полевые устройства или устройства 130-136 управления, маршрутизаторы 60, шлюз 122, а также точки 125a, 125b доступа в целях обеспечения маршрутизации и установления очередности являются сетевыми устройствами или узлами беспроводной сети 114 HART. Чтобы создать весьма устойчивую и легко расширяемую сеть, предполагается, что все сетевые устройства могут поддерживать маршрутизацию, при этом каждое сетевое устройство может глобально идентифицироваться его HART-адресом. Кроме того, каждое сетевое устройство может хранить информацию, касающуюся скоростей обновления, сеансов соединений и ресурсов устройств. Коротко говоря, каждое сетевое устройство сохраняет актуальную информацию, связанную с маршрутизацией и установлением очередности. Устройство 127 управления сетью передает эту информацию сетевым устройствам при инициализации или повторной инициализации сетевых устройств, всякий раз, когда новые устройства присоединяются к сети, или всякий раз, когда устройство управления сетью обнаруживает или производит изменение в топологии или графике беспроводной сети 114 HART.
[0076] Как опять же показано на ФИГ. 3, в паре сетевых устройств, связанных прямым беспроводным соединением 165, каждое устройство распознает другое как соседнее устройство. Таким образом, сетевые устройства беспроводной сети 114 HART могут образовывать большое число соединений 165. Возможность и целесообразность установления прямого беспроводного соединения 165 между двумя сетевыми устройствами определяется рядом факторов, например физическим расстоянием между узлами, наличием препятствий между узлами, мощностью сигнала в каждом из этих двух узлов и т.д. Кроме того, два или более прямых беспроводных соединений 165 могут образовывать каналы между узлами, которые не могут создать прямое беспроводное соединение 165. Например, прямое беспроводное соединение 165 между беспроводным HART-ручным устройством 155 и беспроводным HART-устройством 136 вместе со вторым прямым беспроводным соединением 165 между беспроводным HART-устройством 136 и маршрутизатором 160 образуют канал связи между устройствами 155 и 160.
[0077] Каждое беспроводное соединение 165 характеризуется большим набором параметров, связанных с частотой передачи, способом доступа к радиоресурсу и т.д. Средний специалист в данной области техники поймет, что, в общем, протоколы беспроводной связи могут работать на отведенных частотах, таких как частоты, предписанные Федеральной комиссией по связи (FCC) в США, или в нелицензируемой части спектра радиочастот (2,4ГГц). В то время как система и способ, рассмотренные в настоящем описании, могут применяться для беспроводной сети, работающей на любой отведенной частоте или в любом отведенном диапазоне частот, вариант осуществления, описанный ниже, относится к беспроводной сети 114 HART, работающей в нелицензируемой части или части радиочастотного спектра совместного пользования. Согласно этому варианту осуществления беспроводная сеть 114 HART может легко активироваться и регулироваться для работы в конкретном требуемом нелицензируемом частотном диапазоне.
[0078] На ФИГ. 4 показана блок-схема алгоритма одного примера способа 200, предназначенного для диагностики устройства управления, работающего в системе управления процессами. В одном варианте осуществления способ 200 может реализовываться диагностическим устройством, таким как диагностическое устройство 40 по ФИГ. 1 и 2, или иным диагностическим устройством. Способ 200 может работать в сочетании с приведенным в качестве примера электропневматическим контроллером 20, любым количеством примеров конфигураций, представленных на ФИГ. 1-3, и/или иными пригодными контроллерами, устройствами управления и/или конфигурациями.
[0079] Способ 200 может быть реализован с использованием любой комбинации любых вышеупомянутых технологий, например, с использованием любой комбинации программно-аппаратного обеспечения, программного обеспечения, дискретной логики и/или аппаратного обеспечения. Кроме того, могут быть использованы многие другие способы реализации примеров операций, представленных на ФИГ. 4. Например, порядок функционирования блоков может быть изменен и/или один либо несколько описанных блоков могут быть изменены, исключены, разбиты на подблоки или объединены. Кроме того, любая из операций или все операции способа 200 могут выполняться последовательно и/или выполняться параллельно с помощью, например, отдельных потоков обработки, процессоров, устройств, дискретной логики, контуров и т.д. Следует отметить, что способ 200 описан совместно со ссылками на ФИГ. 1-3 для простоты пояснения, однако данное рассмотрение не носит ограничительного характера.
[0080] В блоке 202 способ 200 может включать в себя определение величины движения или вибрации обследуемого устройства управления процессом. Например, диагностическое устройство может быть установлено на обследуемом устройстве управления или физически соединено с ним, при этом акселерометр, входящий в состав диагностического устройства, может определять величину движения/вибрации устройства управления. В одном варианте осуществления диагностическое устройство установлено на штоке или приводе устройства управления. Например, как показано на ФИГ. 1, акселерометр 45 диагностического устройства 40, установленного на штоке или приводе 31 клапана 30, может определять величину движения или вибрации клапана 30.
[0081] Способ 200 может дополнительно включать в себя определение, превышает ли величина движения или вибрации обследуемого устройства управления процессом заданную пороговую величину или заданное пороговое значение (блок 205). Пороговая величина или пороговое значение может храниться или кодироваться в акселерометре, либо пороговая величина или пороговое значение может храниться или кодироваться в запоминающем устройстве диагностического устройства. В некоторых случаях пороговая величина или пороговое значение может поддаваться изменению или поддаваться настройке, например, пользователем. Если величина движения или вибрации обследуемого устройства управления не превышает порогового значения, способ 200 может возвращаться к блоку 202.
[0082] Когда обнаруживается, что величина движения или вибрации обследуемого устройства управления превышает пороговое значение (блок 205), способ 200 может включать в себя осуществление активации модуля связи, подачи на него питания или его «пробуждение» (блок 208). Например, обращаясь к ФИГ. 2, модуль 58 связи диагностического устройства 40 может приводиться в активное состояние, когда величина движения/вибрации устройства 30 управления превышает пороговую величину T. Модуль 58 связи может активироваться (блок 208) из состояния с отключенным питанием, из состояния сна или любого другого состояния энергосбережения. В одном варианте осуществления модуль 58 связи может активироваться, когда модуль 58 связи принимает сигнал активации, инициированный акселерометром 45. Сигнал активации может приниматься на модуле 58 связи, например, непосредственно с акселерометра 45 (ссылочная позиция 62), или сигнал активации может приниматься на модуле 58 связи с процессора 60, входящего в состав диагностического устройства 40. Например, процессор 60 диагностического устройства 40 может принимать сигнал с акселерометра 45, когда акселерометр 45 определяет, что движение/вибрация устройства управления процессом 30 превышает пороговую величину T, а после получения упомянутого сигнала с акселерометра 45 процессор 60 может передать сигнал активации в модуль 58 связи.
[0083] После того, как модуль связи диагностического устройства активирован (блок 208), способ 200 может включать в себя осуществление передачи аварийного сигнала с диагностического устройства (блок 210) на одно или несколько устройств-адресатов 70a-70p, например, используя активированный модуль связи. Например, обращаясь к ФИГ. 2, модуль 58 связи, после того, как он активирован, может передать аварийный сигнал 65, указывающий на постороннее или избыточное движение или вибрацию устройства 30 управления, на одно или несколько устройств-адресатов 70a-70p. Аварийный сигнал 65 может согласовываться с протоколом беспроводной связи, таким как Zigbee, WirelessHART, или другим протоколом беспроводной связи малого радиуса действия, либо аварийный сигнал 65 может согласовываться с протоколом проводной связи. Кроме того, одно или несколько устройств-адресатов 70a-70p могут включать в себя устройства, представляющие собой часть системы 1 управления процессами, или ассоциированные с ней, например главный компьютер системы управления, контроллер, архивное хранилище данных, анализатор, локальный или удаленный пользовательский интерфейс, внешнее вычислительное устройство и т.д. Аварийный сигнал 65 может непосредственно передаваться с модуля 58 связи по меньшей мере на некоторые из устройств-адресатов 70a-70p. Впрочем, в некоторых случаях аварийный сигнал 65 может передаваться с устройства 58 связи на сопряженное устройство 68, расположенное с возможностью связи между диагностическим устройством 40 и одним или несколькими устройствами-адресатами 70a-70p, при этом сопряженное устройство 68 может передавать или направлять сигнал, соответствующий аварийному сигналу 65, на одно или несколько из устройств-адресатов 70a-70p.
[0084] В некоторых вариантах осуществления способ 200 может включать в себя подачу энергии на модуль связи, используя энергию от устройства для хранения энергии и/или от устройства для сбора энергии (блок 212). Устройство для хранения энергии и/или устройство для сбора энергии могут входить в состав диагностического устройства, либо устройство для хранения энергии и/или устройство для сбора энергии могут быть доступны для диагностического устройства. Например, обращаясь к ФИГ. 2, модуль 58 связи может запитываться с использованием энергии, хранящейся в устройстве 75 для хранения энергии, и/или с использованием энергии, собранной устройством 78 для сбора энергии. В одном варианте осуществления реализация активации модуля 58 связи (блок 208) может включать в себя осуществление активации модуля 58 связи с использованием энергии, предоставляемой устройством 75 для хранения энергии и/или устройством 78 для сбора энергии.
[0085] В тех вариантах осуществления, где устройство для хранения энергии является подзаряжаемым устройством для хранения энергии, способ 200 может включать в себя подзарядку устройства для хранения энергии (блок 215), например, с использованием любой известной технологии подзарядки, например захвата и преобразования солнечной энергии, замены батареи, восстановления энергии локального нагрева, использования вибрации и/или перемещения диагностического устройства и/или устройства управления, к которому крепится диагностическое устройство, временного подсоединения к источнику со штепсельным разъемом, такому как источник питания постоянного тока, передачи энергии индукционным способом с применением бесконтактного зарядного устройства, либо любого другого пригодного средства или механизма подзарядки. В примере, представленном на ФИГ. 2, устройство 75 для хранения энергии может подзаряжаться устройством 78 для сбора энергии.
[0086] По меньшей мере некоторые из различных блоков, операций и технологий, описанных выше, могут быть реализованы в аппаратном обеспечении, процессоре, выполняющем инструкции программно-аппаратного обеспечения и/или программного обеспечения, или любой их комбинации. Например, по меньшей мере части диагностического устройства 40 могут быть реализованы в аппаратном обеспечении, процессоре, выполняющем инструкции программно-аппаратного обеспечения и/или программного обеспечения, или любой их комбинации. Кроме того, по меньшей мере часть блоков по ФИГ. 4 может быть реализована в аппаратном обеспечении, процессоре, выполняющем инструкции программно-аппаратного обеспечения и/или программного обеспечения, или любой их комбинации.
[0087] Кроме того, при реализации с применением процессора, выполняющего инструкции программного обеспечения или программно-аппаратного обеспечения, эти инструкции программного обеспечения или программно-аппаратного обеспечения могут храниться на любом некратковременном материальном компьютерочитаемом носителе информации, таком как магнитный диск, оптический диск, RAM или ROM, либо флэш-память, лентопротяжное устройство и т.д. Инструкции программного обеспечения или программно-аппаратного обеспечения могут включать в себя машиночитаемые инструкции, хранящиеся в запоминающем устройстве или на другом некратковременном компьютерочитаемом носителе информации, которые при выполнении их процессором приводят процессор в действие для выполнения различных действий.
[0088] Помимо этого, при реализации в аппаратном обеспечении аппаратное обеспечение может содержать один или несколько дискретных компонентов, интегральную схему, специализированную интегральную схему (ASIC), программируемое логическое устройство и т.д.
[0089] Кроме того, хотя в вышеприведенном тексте изложено подробное описание множества различных вариантов осуществления, следует понимать, что объем патента определяется пунктами формулы изобретения, изложенной в конце данного патента, а также их эквивалентами.
Подробное описание следует рассматривать лишь как приведенное в качестве примера, но не описывающее каждый возможный вариант осуществления, поскольку описание каждого возможного вариант осуществления представляется нецелесообразным, если не невозможным. Многочисленные альтернативные варианты осуществления могут быть реализованы, используя либо современную технологию, либо технологию, разработанную после даты подачи заявки на этот патент, что будет по-прежнему подпадать под объем притязаний формулы изобретения.



Группа изобретений относится к средствам диагностики устройств управления. Технический результат – уменьшение энергопотребления для диагностики устройства управления. Для этого предложено диагностическое устройство, которое физически соединено с устройством управления в системе управления процессами и включает в себя акселерометр, определяющий, что движение или вибрация устройства управления превышает заданную пороговую величину. Когда такое состояние распознается, один или несколько других компонентов диагностического устройства активируются, при этом с использованием активированных компонентов с диагностического устройства передается аварийный сигнал. Следовательно, рабочие циклы компонентов диагностического устройства сокращаются и оптимизируются, что ведет к существенному сбережению энергии. 2 н. и 16 з.п. ф-лы, 4 ил.
1. Устройство для диагностики устройства управления, используемого в системе управления процессами, содержащее:
акселерометр, чувствительный к движению устройства управления и выполненный с возможностью выработки сигнала, когда величина движения устройства управления превышает пороговую величину; а также
модуль связи, выполненный с возможностью а) принимать непосредственно от акселерометра сигнал, выработанный акселерометром, б) активироваться по приему сигнала, выработанного акселерометром, и в) передавать после активации сигнал, указывающий на то, что величина движения устройства управления превышает пороговую величину, при этом указанное устройство физически соединено с устройством управления.
2. Устройство по п. 1, дополнительно содержащее соединитель, связывающий устройство со штоком или приводом устройства управления.
3. Устройство по п. 1 или 2, дополнительно содержащее устройство для сбора энергии, при этом модуль связи активируется, используя энергию, собранную устройством для сбора энергии.
4. Устройство по п. 3, дополнительно содержащее устройство для хранения энергии, при этом энергия, собранная устройством для сбора энергии, хранится в устройстве для хранения энергии.
5. Устройство по любому из предшествующих пунктов, согласно которому сигнал, передаваемый модулем связи, представляет собой беспроводной сигнал, соответствующий протоколу WirelessHART®, протоколу Zigbee® или протоколу беспроводной связи малого радиуса действия.
6. Устройство по любому из предшествующих пунктов, согласно которому модуль связи пребывает в состоянии с отключенным питанием, состоянии сна или другом состоянии энергосбережения до активации.
7. Устройство по любому из предшествующих пунктов, согласно которому пороговая величина поддается настройке.
8. Устройство по любому из предшествующих пунктов, согласно которому движение устройства управления представляет собой вибрацию устройства управления.
9. Устройство по любому из предшествующих пунктов, согласно которому устройство управления представляет собой клапан.
10. Способ диагностики устройства управления, используемого в системе управления процессами, включающий:
определение величины движения устройства управления посредством акселерометра, содержащегося в диагностическом устройстве, физически соединенном с устройством управления;
непосредственную передачу сигнала в модуль связи, содержащийся в диагностическом устройстве, посредством акселерометра, содержащегося в диагностическом устройстве, когда величина движения устройства управления превышает пороговую величину, при этом прием сигнала осуществляет активацию модуля связи диагностического устройства; а также передачу беспроводного сигнала с диагностического устройства с использованием активированного модуля связи диагностического устройства, при этом беспроводной сигнал указывает на то, что величина движения устройства управления превышает пороговую величину.
11. Способ по п. 10, согласно которому определение величины движения устройства управления включает в себя определение амплитуды вибрации устройства управления.
12. Способ по п. 10 или 11, согласно которому осуществление активации модуля связи включает в себя осуществление активации модуля связи из состояния с отключенным питанием, из состояния сна или из другого состояния энергосбережения.
13. Способ по любому из пп. 10-12, согласно которому осуществление передачи беспроводного сигнала с диагностического устройства включает в себя осуществление передачи беспроводного сигнала с диагностического устройства по меньшей мере на один из следующих объектов:
контроллер устройства управления;
главный компьютер системы управления процессами; или
устройство, сопряженное с диагностическим устройством, при этом сопряженное устройство по меньшей мере (1) расположено с возможностью связи между диагностическим устройством и контроллером либо (2) расположено с возможностью связи между диагностическим устройством и главным компьютером системы управления.
14. Способ по любому из пп. 10-13, согласно которому осуществление передачи беспроводного сигнала с диагностического устройства включает в себя осуществление передачи беспроводного сигнала с диагностического устройства с использованием протокола WirelessHART®, протокола Zigbee® или протокола беспроводной связи малого радиуса действия.
15. Способ по любому из пп. 10-14, дополнительно включающий подачу энергии на модуль связи, используя энергию, хранящуюся в устройстве для хранения энергии, входящем в состав диагностического устройства или расположенном вблизи него.
16. Способ по п. 15, дополнительно включающий подзарядку устройства для хранения энергии посредством использования по меньшей мере одного из: солнечной энергии, временного соединения устройства для хранения энергии с источником энергии, восстановленной энергии от локальной вибрации или перемещения либо передачи энергии индукционным способом от бесконтактного зарядного устройства.
17. Способ по любому из пп. 10-16, согласно которому определение величины движения устройства управления включает определение величины движения клапана.
18. Способ по любому из пп. 10-17, согласно которому пороговое значение хранится в акселерометре, при этом способ дополнительно включает изменение порогового значения.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ДИАГНОСТИКА ТЕХНОЛОГИЧЕСКОГО УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ СИГНАЛА ДАТЧИКА ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 2004 |
|
RU2325685C2 |

