ОБЛАСТЬ ТЕХНИКИ
Настоящее раскрытие относится к датчикам влажности для транспортных средств.
УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Чтобы удовлетворять все более и более обязательную экономию топлива и дать импульс для развития средств управления силовой передачей, которые используют удельную влажность в качестве входного сигнала на некоторых транспортных средствах для регулирования рабочих параметров двигателя, таких как топливовоздушное соотношение, интенсивность рециркуляции отработавших газов, и т.д. Наиболее близким аналогом предлагаемого изобретения является документ US 2012158207 (Α1), опубликованный 21.06.2012, раскрывающий виртуальное зондирование погодных условий окружающей среды. Так как удельная влажность оказывает влияние на плотность заряда воздуха, удельную газовую постоянную, отношение удельной теплоемкости и содержания кислорода среди прочего, точные данные удельной влажности используются при расчете интенсивностей EGR, установки момента зажигания и регулировании топливо-воздушного соотношения, а также других средств управления силовым приводом. Включение удельной влажности в расчеты для таких параметров раньше привлекало датчик влажности на транспортном средстве. Разработка датчика для измерения удельной влажности на транспортном средстве затруднительна, так как такие устройства используют точное измерение удельной теплоемкости или плотности воздуха. Кроме того, некоторое количество воды в воздухе не находится в форме пара, но в качестве аэрозоля, что дополнительно усложняет измерение влажности. Так как это редко выполнимо на движущемся транспортном средстве, использовалось устройство относительной влажности, которое оценивает удельную влажность по относительной влажности, температуре окружающей среды и давлению окружающей среды.
Оценка удельной влажности на основании относительной влажности приводит к потере точности, так как оценка удельной влажности насыщения не точна и зависит от факторов, таких как присутствие льда в воде в поверхностной среде, а также размер и химический состав аэрозольных частиц в воздухе среди других факторов. Кроме того, датчики относительной влажности являются дорогостоящими и неуравновешенными. Без калибровки, точность датчиков относительной влажности может радикально снижаться. Вследствие изменчивой природы датчиков влажности прямого действия, может быть необходимым использование дополнительных датчиков влажности или дополнительных спаренных метеорологических датчиков.
Изобретатели в материалах настоящей заявки осознали вышеупомянутые затруднения и ассоциативно связанные затраты физического датчика влажности или других метеорологических датчиков, и раскрыли системы и способы для получения удельной влажности из данных датчиков, легкодоступных на шине обмена данными транспортного средства.
Раскрыт виртуальный датчик влажности, который принимает входные сигналы с датчика положения/времени/даты транспортного средства, датчика температуры окружающей среды, датчика барометрического давления и других данных, обычно имеющихся в распоряжении на шине обмена данными транспортного средства, такие как состояние стеклоочистителя, измерения пирометра, плотность топлива, и т.д. Внешние данные из беспроводного устройства, если оно имеется в распоряжении, могут использоваться для повышения точности расчета. Беспроводные устройства, подобные IBOC (с методом передачи цифровых и аналоговых сигналов в общей полосе частот по общему каналу связи, например, HD-радио) и спутниковым радиоприемникам, сейчас устанавливаются на большинстве транспортных средств, эти устройства могут принимать данные, собранные с метеостанций, и широковещательно передаваться местными радиостанциями.
Раскрытый датчик может быть информационным фильтром, реализованным в программном обеспечении, и работать на компьютере, встроенном в транспортное средство и присоединенным к шине (CAN) обмена данными транспортного средства. Фильтр будет реализован в качестве алгоритма обучения, такого как нейронная сеть, которая сначала обучается автономно с использованием исторических погодных и других данных, а затем, позже может обучаться в подключенном режиме (в транспортном средстве) внешними данными, когда они имеются в распоряжении.
В настоящей заявке также предлагается устройство настройки компонент силовой передачи двигателя транспортного средства содержащее шину (CAN) обмена данными транспортного средства, датчики состояния транспортного средства, присоединенные к шине обмена данными транспортного средства, контроллер, содержащий шину обмена данными транспортного средства и виртуальный датчик влажности; причем виртуальный датчик влажности выполнен с возможностью оценки влажности по данным датчиков состояния транспортного средства, причем контроллер в ответ на оцененную влажность выполнен с возможностью настройки системы рециркуляции отработавших газов двигателя транспортного средства и установки момента зажигания двигателя; причем устройство дополнительно содержит модуль обучения для сравнения измеренной влажности с оцененной влажностью, и машинно-читаемый запоминающий носитель с логическим блоком, присоединенным к шине обмена данными транспортного средства и включающим в себя команды, хранимые на нем, для выгрузки обновлений параметров модуля обучения и собранных данных влажности на сервер облачной среды, внешний для транспортного средства.
Предлагаемое изобретение направлено на улучшение эффективности настройки компонент силовой передачи двигателя транспортного средства. При этом совокупность признаков формулы изобретения направлена на достижение указанного технического результата, а именно через шину обмена данными передается информация состояния датчиков транспортного средства, в результате анализа которой виртуальный датчик влажности оценивает влажность, а контроллер в ответ на оцененную влажность проводит настройку системы рециркуляции отработавших газов двигателя транспортного средства и установку момента зажигания двигателя, причем повышение точности оценки влажности осуществляется за счет машинно-читаемого запоминающего носителя с логическим блоком, присоединенным к шине обмена данными транспортного средства и включающим в себя команды, хранимые на нем, для выгрузки обновлений параметров модуля обучения и собранных данных влажности на сервер облачной среды, внешний для транспортного средства. В результате повышается эффективность настройки компонент силовой передачи двигателя транспортного средства.
Кроме того, предусмотрены системы и способы для настройки компонента силовой передачи двигателя в ответ на влажность окружающей среды, влажность окружающей среды основана на положении транспортного средства в регионе, температуре окружающей среды и исторических данных влажности по такому региону для текущего времени года и времени суток. Это может успешно выполняться, не полагаясь на дорогостоящий и зачастую неуравновешенный физический датчик влажности. Модули обучения и обновления облачной среды дополнительно повышают точность виртуального датчика влажности по настоящему раскрытию.
В настоящей заявке предлагается решение, в котором настраивают компонент силовой передачи двигателя в ответ на барометрическое давление и влажность окружающей среды, влажность окружающей среды основана на местоположении транспортного средства в регионе, времени дня и года, температуре окружающей среды и данных по такому региону для текущего времени года. Причем настройка компонента силовой передачи двигателя состоит в том, что настраивают систему рециркуляции отработавших газов двигателя и установку момента зажигания двигателя. Кроме того, настройка компонента силовой передачи двигателя состоит в том, что настраивают установку момента зажигания двигателя. Также принимают входные данные из компонентов шин обмена данными транспортного средства, в том числе, по меньшей мере одно из местоположения транспортного средства, показания часов, температуры окружающей среды и исторических данных влажности. Компонент силовой передачи двигателя расположен в транспортном средстве, передвигающемся по дороге, способ дополнительно состоит в том, что корректируют влажность окружающей среды на основании данных, обмениваемых с вычислительной сетью, внешней для транспортного средства.
Корректируют исторические данные влажности на основании данных, обмениваемых с вычислительной сетью. Выгружают обновления параметров модуля обучения и собранные данные влажности на сервер облачной среды, внешний для транспортного средства, в котором расположена силовая передача, выгрузка происходит во время эксплуатации транспортного средства, и при этом, обновления параметров модуля обучения и собранные данные влажности формируются во время эксплуатации транспортного средства.
Одним из вариантов воплощения предлагаемого изобретения является виртуальный датчик влажности на транспортном средстве, содержащий шину обмена данными транспортного средства; транспортное средство, эксплуатирующее датчики состояния транспортного средства, присоединенные к шине обмена данными транспортного средства; модуль обучения для сравнения измеренной влажности с оцененной влажностью; и машинно-читаемый запоминающий носитель с логическим блоком, присоединенным к шине обмена данными транспортного средства и включающим в себя команды, хранимые на нем, для выгрузки обновлений параметров модуля обучения и собранных данных влажности на сервер облачной среды, внешний для транспортного средства. Причем датчики состояния транспортного средства сдержат глобальную систему определения местоположения. Кроме того, датчики функционирования двигателя содержат датчик барометрического абсолютного давления. Причем датчики состояния транспортного средства могут сдержать датчик состояния стеклоочистителя. Кроме того, измеренная влажность формируется с помощью данных, обмениваемых с соединением сети Интернет логического блока. Измеренная влажность также формируется с помощью данных, обмениваемых с соединением спутниковой радиостанции логического блока. Измеренная влажность формируется с помощью данных, обмениваемых с соединением радиостанции IBOC логического блока.
Также в настоящей заявке предлагается решение, в котором оценивают влажность на основании данных транспортного средства, содержащих местоположение глобальной системы определения местоположения, температуру окружающей среды, барометрическое давление и хранимые данных влажности, справочные таблицы и формулы; и выгружают полученные оценки влажности и обновления параметров модуля обучения на сервер облачной среды. Кроме того дополнительно присоединяются к соединению сети Интернет, когда имеется в распоряжении, чтобы принимать измеренную влажность. Дополнительно присоединяются к радиостанции IBOC, когда имеется в распоряжении, чтобы принимать измеренную влажность. Данные транспортного средства дополнительно содержат данные, время и высоту. Кроме того, дополнительно обучают виртуальный датчик влажности до момента использования транспортного средства, при этом, обучение виртуального датчика влажности состоит в том, что повторно оценивают влажность до тех пор, пока отличие оцененной влажности от принятой измеренной влажности перестает уменьшаться с каждым повторением. Выгрузка на сервер облачной среды может выполняться многочисленными транспортными средствами, увеличивающими имеющиеся в распоряжении данные влажности и обновления параметров модуля обучения, способ дополнительно состоит в том, что загружают информацию с сервера облачной среды и оценивают влажность на основании загруженной информации.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания, когда воспринимается в одиночку или в связи с прилагаемыми чертежами. Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, отмеченные выше или в любой части этого раскрытия. Кроме того, изобретатели в материалах настоящей заявки осознали недостатки, отмеченные в ней, и не признают их в качестве известных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 показывает примерный цилиндр двигателя.
Фиг. 2 показывает схему для виртуального датчика в режиме без обучения.
Фиг. 3 показывает схему для виртуального датчика в режиме обучения.
Фиг. 4 показывает схему для виртуального датчика в режиме обновления.
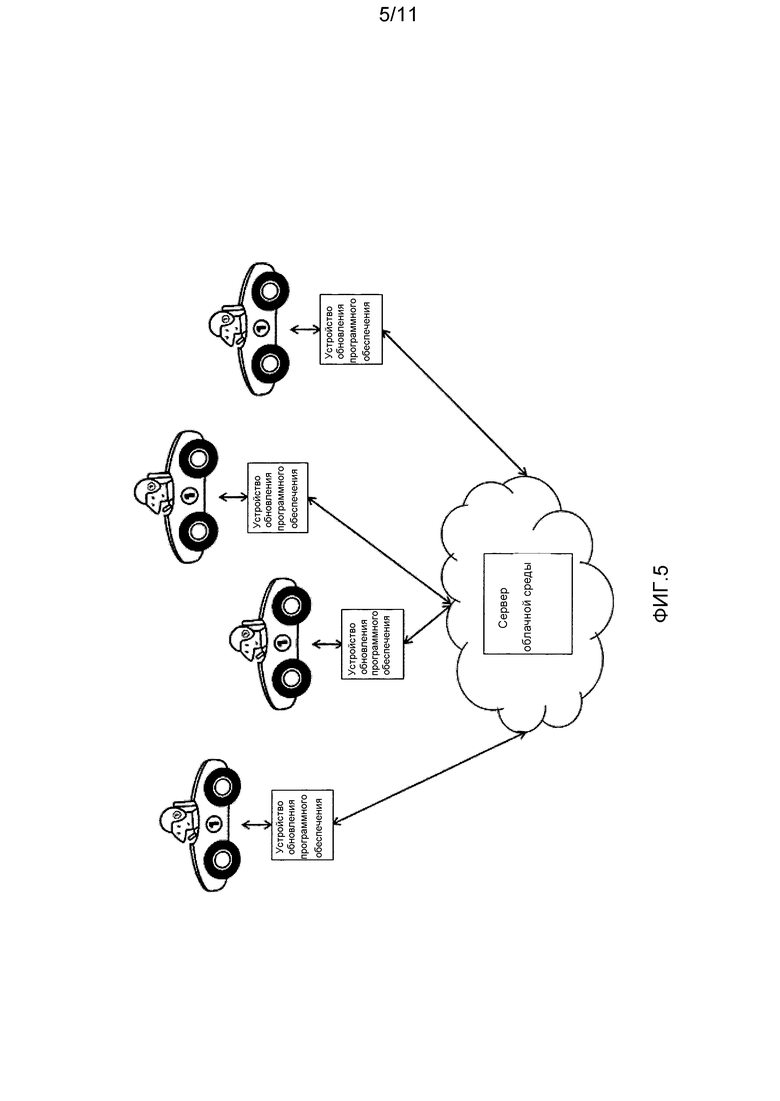
Фиг. 5 показывает схему автономного обучения виртуального датчика.
Фиг. 6 показывает примерные данные влажности из Детройта.
Фиг. 7 показывает примерные данные влажности из Хьюстона.
Фиг. 8 показывает примерные данные влажности из Феникса.
Фиг. 9 показывает блок-схему последовательности операций способа типичной эксплуатации виртуального датчика влажности.
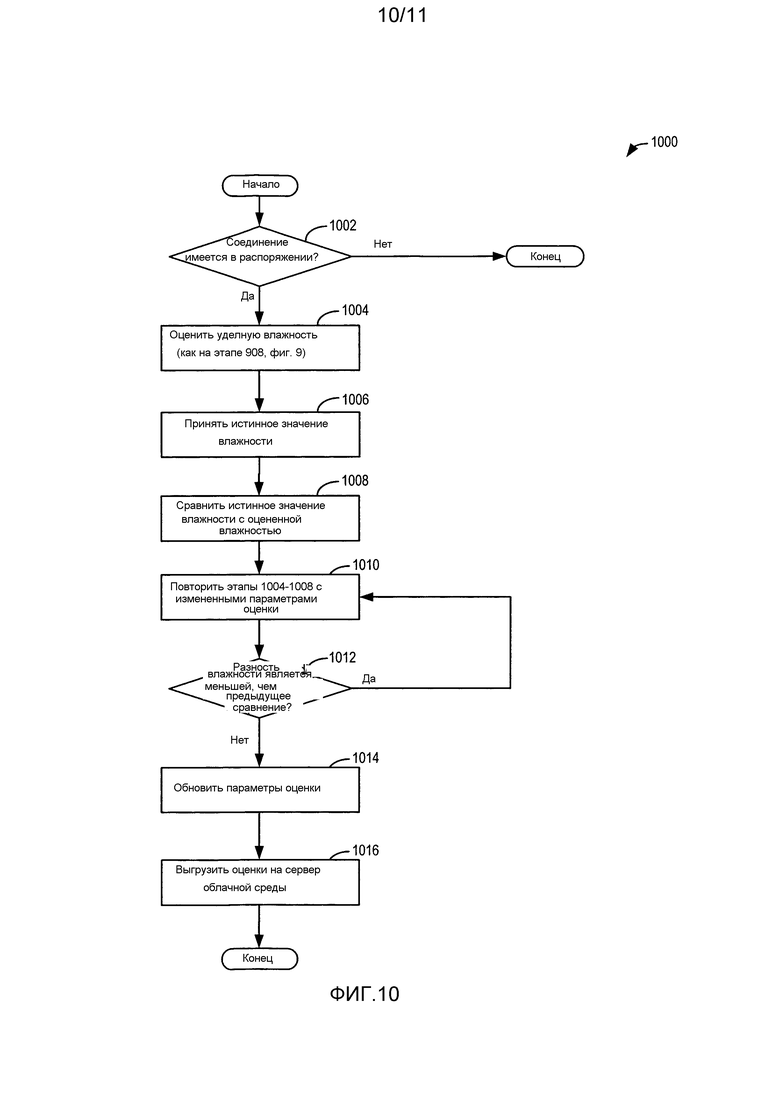
Фиг. 10 показывает блок-схему последовательности операций способа режима обучения виртуального датчика влажности.
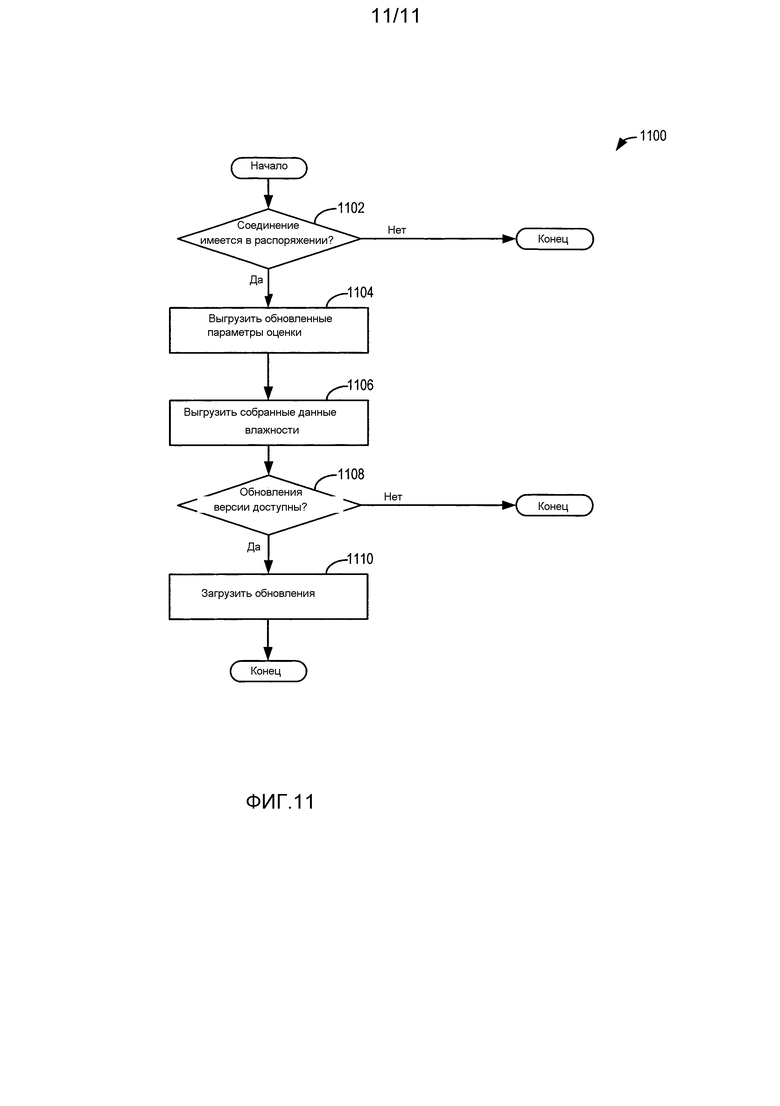
Фиг. 11 показывает блок-схему последовательности операций способа режима обновления виртуального датчика влажности.
ПОДРОБНОЕ ОПИСАНИЕ
Целью настоящего раскрытия является виртуальный датчик влажности. Раскрытый датчик использует существующие датчики транспортного средства с историческими данными влажности для данной зоны, чтобы оценивать удельную влажность. Удельная влажность имеет растущую важность для средств управления силовым приводом, таких как интенсивность рециркуляции отработавших газов и установка момента зажигания, так как удельная влажность имеет отношение к плотности заряда воздуха и имеющемуся в распоряжении содержанию кислорода, в качестве примеров. Легкодоступные исторические климатические данные могут быть предварительно загружены в память ECU. Более того, виртуальный датчик влажности может обучаться, например, в то время как соединения имеются в распоряжении, чтобы ECU присоединялся к сети Интернет или спутниковому радио для приема действительного значения влажности.
Цель настоящего раскрытия будет описана подробнее ниже со ссылкой на фигуры. Фиг. 1 показывает примерный цилиндр двигателя и различные физические датчики, которые могут использоваться виртуальным датчиком влажности при оценке удельной влажности. Фиг. 2-5 показывают схемы разных рабочих режимов виртуального датчика влажности. Фиг. 6-8 показывают примеры исторических данных влажности разновидности, которая может использоваться виртуальным датчиком влажности при оценке удельной влажности или в режиме обучения для обновления виртуального датчика.
Со ссылкой на фиг. 1, двигатель 10 внутреннего сгорания содержит множество цилиндров, один цилиндр которого показан на фиг. 1. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала РР положения педали. Камера 30 (то есть, цилиндр) сгорания двигателя 10 может включать в себя стенки 32 камеры сгорания с поршнем 36, расположенными в них. Поршень 36 может быть присоединен к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии. Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответственный впускной клапан 52 и выпускной клапан 54. Каждый впускной клапан и выпускной клапан может приводиться в действие кулачком 51 впускного клапана и кулачком 53 выпускного клапана. В качестве альтернативы, один или более из впускных и выпускных клапанов могут приводиться в действие узлом катушки и якоря клапана с электромеханическим управлением. Положение кулачка 51 впускного клапана может определяться датчиком 55 кулачка впускного клапана. Положение кулачка 53 выпускного клапана может определяться датчиком 57 кулачка выпускного клапана.
Топливная форсунка 66 показана в качестве устройства непосредственного впрыска, присоединенного непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно в качестве непосредственного впрыска топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления, камера 30 сгорания, в качестве альтернативы или дополнительно, может включать в себя топливную форсунку, скомпонованную во впускном канале 42, в конфигурации, которая предусматривает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере, положение дроссельной заслонки 64 может регулироваться контроллером 12 посредством сигналов, выдаваемых на электродвигатель или исполнительный механизм, заключенный дросселем 62, конфигурацией, которая обычно указывается ссылкой как электронный регулятор дросселя (ETC). Таким образом, дроссель 62 может приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, среди других цилиндров двигателя. Положение дроссельной заслонки 64 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канала 42 может включать в себя датчик 120 массового расхода воздуха для выдачи сигнала массового расхода воздуха, MAF, в контроллер 12.
Датчик 126 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от устройства 70 снижения токсичности выбросов. Датчик 12 6 может быть любым подходящим датчиком для выдачи показания соотношения воздуха отработавших газов/топлива, таким как линейный датчик кислорода или UEGO (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или EGO, HEGO (подогреваемый EGO), датчик содержания NOx, НС, или СО. Устройство 70 снижения токсичности выбросов показано скомпонованным вдоль выпускного канала 48 ниже по потоку от датчика 126 отработавших газов. Устройство 70 снижения токсичности отработавших газов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности отработавших газов или их комбинациями. В некоторых вариантах осуществления, во время работы двигателя 10, устройство 70 снижения токсичности выбросов может периодически восстанавливаться посредством приведения в действие по меньшей мере одного цилиндра двигателя в пределах конкретного топливо/воздушного соотношения.
Кроме того, система рециркуляции отработавших газов (EGR) может направлять требуемую часть отработавших газов из выпускного канала 48 во впускной коллектор 44 через канал 140 EGR сквозь клапан 142 EGR и диафрагму EGR (не показана). Отработавшие газы, рециркулированные через систему EGR, могут направляться во все цилиндры, присутствующие в многоцилиндровом двигателе, через впускной коллектор 44. В двигателе с турбонаддувом (не показан), система EGR может быть системой высокого давления (из выше по потоку от турбины в ниже по потоку от компрессора) или системой EGR низкого давления (из ниже по потоку от турбины в выше по потоку от компрессора).
Контроллер 12 показан на фиг. 1 в качестве традиционного микрокомпьютера, включающего в себя: микропроцессорный блок 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, дежурную память 110, часы 111 и традиционную шину данных, в целом указанную под 13. Дополнительно, контроллер 12 может содержать логический блок транспортного средства. Логический блок может быть пригодным для содействия передаче информации в или из внешней сети, такой как спутниковое радио, радио IBOC (с методом передачи цифровых и аналоговых сигналов в общей полосе частот по общему каналу связи) или сеть Интернет и магистральная шина обмена данными транспортного средства. Контроллер 12 показан принимающим различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе: температуру охлаждающей жидкости двигателя (ЕСТ) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; датчика 134 положения, присоединенного к педали 130 акселератора для считывания силы, приложенной ступней 132; измерение абсолютного давления в коллекторе двигателя (MAP) с датчика 122 давления, присоединенного к впускному коллектору 44; датчика положения двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; измерение массы воздуха, поступающего в двигатель, с датчика 120; и измерение положения дросселя с датчика 58. Давление во впускном коллекторе также может считываться датчиком 122 MAP для обработки контроллером 12. ВАР 59 (датчик барометрического давления) измеряет абсолютное давление окружающей среды. В предпочтительном аспекте настоящего описания, датчик 118 положения двигателя вырабатывает предопределенное количество равномерно разнесенных импульсов каждый оборот коленчатого вала, по которому может определяться частота вращения двигателя (RPM, в оборотах в минуту).
В некоторых вариантах осуществления, двигатель может быть присоединен к системе электродвигателя/аккумуляторной батареи в транспортном средстве с гибридным приводом. Транспортное средство с гибридным приводом может иметь параллельную конфигурацию, последовательную конфигурацию, либо их варианты или комбинации.
Во время работы, каждый цилиндр в двигателе 10 типично подвергается четырехтактному циклу: цикл включает в себя такт впуска, такт сжатия, такт расширения и такт выпуска. В течение такта впуска, обычно, выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух вовлекается в камеру 30 сгорания через впускной коллектор 44, поршень 36 перемещается к дну цилиндра, с тем чтобы увеличивать объем внутри камеры 30 сгорания. Положение, в котором поршень 36 находится около дна цилиндра и в конце своего хода (например, когда камера 30 сгорания находится при своем наибольшем объеме), типично указывается специалистами в данной области техники ссылкой как нижняя мертвая точка (НМТ, BDC). Во время такта сжатия, впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 перемещается к головке блока цилиндров, с тем чтобы сжимать воздух внутри камеры 30 сгорания. Точка, в которой поршень 36 находится в конце своего хода и самой близкой к головке блока цилиндров (например, когда камера 30 сгорания находится при своем наименьшем объеме), типично указывается специалистами в данной области техники в качестве верхней мертвой точки (ВМТ, TDC). В процессе, в дальнейшем указываемом ссылкой как впрыск, топливо вводится в камеру сгорания. В процессе, в дальнейшем указываемом ссылкой как воспламенение, впрыснутое топливо воспламеняется известным средством воспламенения, таким как свеча 92 зажигания, приводя к сгоранию. Во время такта расширения, расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует перемещение поршня в крутящий момент вращающегося вала. В заключение, во время такта выпуска, выпускной клапан 54 открывается, чтобы выпускать подвергнутую сгоранию топливо-воздушную смесь в выпускной коллектор 48, и поршень возвращается в ВМТ. Отметим, что вышеприведенное показано просто в качестве примера, и что установки момента открывания и/или закрывания впускного и выпускного клапанов могут меняться так, чтобы давать положительные или отрицательное перекрытие клапанов, позднее закрывание впускного клапана, или различные другие примеры.
Система 88 зажигания может выдавать искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на сигнал SA опережения зажигания из контроллера 12, при выбранных рабочих режимах. Хотя показаны компоненты искрового зажигания, в некоторых вариантах осуществления, камера 30 сгорания или одна или более других камер сгорания двигателя 10 могут эксплуатироваться в режиме воспламенения от сжатия, с или без свечи зажигания.
Например, двигатель 10 может эксплуатироваться в качестве двигателя с воспламенением от сжатия однородного заряда (HCCI).
При сгорании SI, система 88 зажигания выдает искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на сигнал SA опережения зажигания из контроллера 12. В качестве альтернативы, двигатель 10 может предпочитать выполнять режим HCCI сгорания, в котором смесь воздуха и топлива достигает температуры, где сгорание происходить посредством самовоспламенения, не требуя искры от устройства искрового зажигания. Во время HCCI, или управляемого самовоспламенения (CAI), самовоспламенение газов в камере сгорания происходит в предопределенный момент после такта сжатия цикла сгорания или около верхней мертвой точки такта сжатия. Типично, когда используется воспламенение от сжатия предварительно смешанного заряда воздуха и топлива, топливо обычно однородно предварительно смешивается с воздухом, как в двигателе с оконным впрыском и искровым зажиганием или при непосредственно впрыскиваемом топливе в течение такта впуска, но с высоким количественным соотношением воздуха и топлива.
Поскольку топливовоздушная смесь сильно разбавлена воздухом или остаточными отработавшими газами, что дает в результате более низкие температуры газообразных продуктов сгорания, выработка NOx может снижаться по сравнению с уровнями, обнаруживаемыми в ходе сгорания SI.
Контроллер 12 дополнительно может содержать виртуальный датчик 107 влажности, как описанный в материалах настоящей заявки. Виртуальный датчик влажности может принимать входные сигналы из системы определения местоположения, такой как GPS 141 (глобальная система определения местоположения), глобальное показание часов также может выдаваться посредством GPS 141, датчика 142 качества топлива, датчика 140 всасываемого воздуха, пирометр 143, датчика 144 состояния стеклоочистителя, датчика 14 6 температуры окружающей среды и датчика 148 плотности топлива, среди прочего, а также скорость изменения этих переменных на протяжении разных интервалов времени. Эти датчики могут быть существующими датчиками на транспортном средстве и выдавать входные сигналы датчиков в разнообразные системы по всему транспортному средству и двигателю внутреннего сгорания в дополнение к внесению данных в виртуальный датчик влажности. Пирометр 143 может использоваться вместо датчика 145 освещения для узнавания потока солнечного излучения.
Использование и значимость измерения удельной влажности для работы транспортного средства широко распространены. Влажность является значимым фактором шума в датчике MAF, объясняющим не меньше чем 8% погрешности в показаниях. В одном из примеров, значение влажности, полученное виртуальным датчиком влажности по настоящему раскрытию, может использоваться при расчете массового расхода воздуха или при расчете смещения или погрешности датчика MAF.
Влажность также может использоваться для применений автоматической системы кондиционирования воздуха, чтобы предугадывать потребность осушения и оценивать потребление энергии на осушение. В еще одном примере, контроллер двигателя может использовать оцененную влажность из виртуального датчика влажности по настоящему раскрытию при расчете отдачи автоматической системы кондиционирования воздуха. Например, высокая влажность может требовать повышенной отдачи кондиционирования воздуха.
Влажность также может использоваться при оценке теплоемкости воздуха для охлаждения аккумуляторной батареи на транспортных средствах с электрическим или гибридным электрическим приводом. В варианте осуществления, где виртуальный датчик влажности в соответствии с настоящим раскрытием может быть установлен на транспортном средстве с гибридным электрическим или электрическим приводом, содержащим аккумуляторные батареи, оценка влажности, произведенная виртуальным датчиком влажности, может использоваться контроллером двигателя при расчете или оценке нужд охлаждения для аккумуляторных батарей такого транспортного средства. Плотность и теплоемкость воздуха являются важными факторами в высококачественных расчетах расстояния до опустошения, необходимых для транспортных средств с гибридным электрическим и электрическим приводом. Так как удельная влажность оказывает влияние как на плотность, так и на теплоемкость воздуха, контроллер двигателя дополнительно может учитывать значение влажности, выработанное виртуальным датчиком влажности, при расчете оставшейся емкости аккумуляторной батареи.
Распределение температуры точки росы окружающей среды является важным для предвосхищения плохой видимости, обусловленной туманом, и для выявления гололеда. Транспортное средство, оборудованное системами выявления видимости, которые управляют фарами или другими признаками транспортного средства, дополнительно может использовать оценку влажности с виртуального датчика влажности по настоящему раскрытию, например, при определении, должны ли быть введены в действие фары. Более того, транспортные средства с системами предупреждения об опасности обледенения или регулированием тягового усилия, например, могут учитывать значение влажности из виртуального датчика влажности при предупреждении водителя о потенциальной возможности для гололеда или при включении системы регулирования тягового усилия или антиблокировочной тормозной системы.
Более того, удельная влажность воздействует на установку фаз кулачкового распределения в двигателях с HCCI. В двигателе, функционирующем посредством HCCI, контроллер двигателя может принимать во внимание значение влажности, выработанное виртуальным датчиком влажности по настоящему раскрытию, например, для осуществления опережения или запаздывания установки фаз кулачкового распределения.
В еще одном примере, где виртуальный датчик влажности по настоящему раскрытию используется в соединении с дизельным двигателем, удельная влажность может использоваться для перекалибровки датчиков аммиака в дизельных системах очистки выбросов с избирательным каталитическим восстановлением. Контроллер двигателя может использовать значение влажности при калибровке датчиков аммиака, которая, в свою очередь, может изменять временные характеристики впрыска и дозирование мочевины, или восстановлении DPF, в качестве примеров.
Виртуальный датчик влажности по настоящему раскрытию может хранить исторические климатические данные для данных местоположений, различные справочные таблицы и формулы для расчета влажности. Такие данные могут предварительно загружаться в контроллер двигателя и могут периодически обновляться, например, когда транспортное средство подвергается техническому обслуживанию, или когда становится имеющимся в распоряжении беспроводное соединение. Примерная таблица данных, которая может использоваться при оценке удельной влажности, показана ниже.

Виртуальный датчик влажности по настоящему раскрытию оценивает влажность, среди прочего, считывая среднее время по Гринвичу (GMT) с бортовых часов или GPS. Информация с бортовых часов может включать в себя время суток, время года, месяц, дату, сезон, и т.д. Времена года могут включать в себя четыре сезона: лето, зиму, осень и весну. Ширина, долгота и высота могут предоставляться существующей GPS 141, или другим устройством определения местоположения. Высота дополнительно может логически выводиться из известной широты и долготы с использованием хранимой справочной таблицы высот по глобальному местоположению. Местоположение GPS может использоваться, чтобы проводить различие местоположения по конкретному городу, штату, округу, почтовому индексу или специфичной широте и долготе, как в примере, приведенном выше. Заданный регион или специфика могут быть результатом того, где имеются в распоряжении данные. Температура окружающей среды может выдаваться датчиком 146 температуры окружающей среды. Информация в отношении осадков может выдаваться датчиком 144 состояния стеклоочистителя. Некоторые транспортные средства дополнительно могут быть снаряжены датчиками 145 условий освещения, которые используются на многих транспортных средствах для управления или выдачи сигналов на фары в условиях тумана, облачности или других условиях тусклого освещения. Более того, барометрическое давление может считываться датчиком 59. Из этих входных данных и таблиц, подобных вышеприведенной, может выдаваться вероятностная удельная влажность, в которой предусмотрены ожидаемая удельная влажности и интервал математического ожидания.
В режиме обучения, виртуальный датчик влажности пытается оценивать влажность по другим значениями и сравнивает ее с измеренной влажностью в последнем столбце таблицы 1. Разность меду измеренным и рассчитанным значениями затем используется для внесения поправки в параметры в информационном фильтре, и последовательность операций повторяется до тех пор, пока разности больше не уменьшаются с каждым повторением. Столбец влажности по таблице 1 может соответствовать непосредственным измерениям, или он может соответствовать данным влажности, логически выведенным из предыдущих поколений виртуальных датчиков. Более того, машинно-читаемый запоминающий носитель с логическим блоком может быть присоединен к шине обмена данными и включать в себя команды, хранимые на нем, для выгрузки обновлений параметров модуля обучения и собранных данных влажности на сервер облачной среды, внешний для транспортного средства.
Далее, с обращением к фиг. 2, показана схема виртуального датчика, в то время как в нормальном рабочем режиме. Шина обмена данными 13 транспортного средства передает по сети разнообразные входные данные датчиков и выходные сигналы в и из устройство 104 ввода/вывода контроллера 12. Шина обмена данными транспортного средства может быть сконфигурирована в качестве CAN (локальной сети контроллеров), LIN (локальной сети соединений) или другого типа сети. Виртуальный датчик влажности (VHS) показан на 107 в состоянии без обучения. В состоянии без обучения, входные значения, в том числе, данные с датчика MAP, GPS, часов, датчика температуры окружающей среды, и т.д., используются виртуальным датчиком 107 влажности, и значение влажности возвращается в устройство 104 ввода/вывода. Оценка влажности возвращается на шину обмена данными транспортного средства, где она используется в регулировании интенсивности рециркуляции отработавших газов, топливо-воздушного соотношения и или установки момента зажигания, в качестве неограничивающих примеров.
Здесь приведены примерные способы для регулирования интенсивности EGR или установки момента зажигания, когда имеют отношение к влажности. Регулирование интенсивности рециркуляции отработавших газов в двигателе внутреннего сгорания может выполняться посредством формирования значения числа оборотов в минуту, которое указывает число оборотов двигателя, формирования значения заряда воздуха, которое указывает заряд воздуха, поступающий во впускной коллектор двигателя, и формирования значения влажности, которое служит признаком уровня влажности окружающей среды. Множитель рассчитывается в качестве функции значения числа оборотов в минуту и значения заряда воздуха. Этот множитель представляет изменение процентного отношения EGR на каждое минимальное приращение отклонения влажности от нормальной влажности. Базовое значение интенсивности рециркуляции отработавших газов в таком случае определяется в качестве функции по меньшей мере значения числа оборотов в минуту и значения заряда воздуха. Базовая интенсивность рециркуляции отработавших газов затем корректируется произведением множителя и величины, на которую нормальная влажность меньше наблюдаемой влажности. Таким образом, интенсивность EGR может соответственно компенсироваться касательно воздействия атмосферной влажности.
Удельная влажность используется при управлении другими аспектами работы двигателя, в том числе, установкой момента зажигания. Пограничная установка момента зажигания необходима для обеспечения эффективной работы двигателя с учетом рабочих характеристик и выбросов. Регулирование пограничной установки момента зажигания двигателя внутреннего сгорания может выполняться посредством формирования значения числа оборотов в минуту, которое указывает число оборотов двигателя, формирования значения заряда воздуха, которое указывает заряд воздуха, поступающий во впускной коллектор двигателя, и формирования значения влажности, которое служит признаком уровня влажности окружающей среды. Множитель может рассчитываться в качестве функции значения числа оборотов в минуту и значения заряда воздуха. Этот множитель представляет степень изменения искрового зажигания на каждое минимальное приращение влажности, возможную без навлекания детонации в двигателе. Пограничное значение искрового зажигания затем рассчитывается в качестве функции по меньшей мере значения числа оборотов в минуту и значения заряда воздуха. Пограничное значение искрового зажигания, в таком случае, может корректироваться произведением множителя и оцененной влажности для компенсации установки момента зажигания двигателя на действие влажности.
Более того, удельная влажность может изменять комфорт в кабине транспортного средства. Дополнительное использование точного измерения удельной влажности предназначено для управления автоматической системой кондиционирования воздуха, где оно используется для оценки точки росы и теплоемкости окружающего воздуха, чтобы улучшать безопасность транспортного средства посредством предотвращения запотевания стекол и улучшения комфорта посредством поддержания климата в зоне теплового комфорта.
Далее, с обращением к фиг. 3, показана схема виртуального датчика влажности в режиме обучения. Режим обучения может выполняться во время производства; из условия чтобы, как только транспортное средство находится на дороге, виртуальный датчик влажности содержал в себе самые последние обновления параметров и был достаточным для оценки удельной влажности прямо по приведению в движение. Режим обучения может возыметь действие, когда транспортное средство находится в местоположении для соединения с источником измеренной или истинной влажности. Такое соединение может быть беспроводным соединением сети Интернет, телефонным соединением, соединением спутниковой радиостанции и/или радиостанции IBOC (с методом передачи цифровых и аналоговых сигналов в общей полосе частот по общему каналу связи, например, HD). Такие соединения могут использоваться при присоединении к имеющемуся в распоряжении соединению, для приема измеренной влажности и потенциально возможного обмена другими данными, включающими в себя выгрузку собранных данных и загрузку обновлений для обучения или других целей. Более того, соединение, пригодное для предоставления измеренной удельной влажности, может быть постоянным проводным соединением. Например, во время регулярного технического обслуживания и текущего ремонта транспортного средства, модуль обучения может подключаться к внешнему компьютеру.
Модуль обучения, изображенный на фиг. 3, содержит компоненты, описанные выше со ссылкой на фиг. 2. Шина обмена данными 13 транспортного средства присоединяется к контроллеру 12 двигателя. Внутри контроллера двигателя, устройство 104 ввода/вывода выдает входные значения в виртуальный датчик 107 влажности. В дополнение, шина обмена данными транспортного средства присоединяется к источнику 150 измеренной влажности. Источник измеренной влажности подает истинную, измеренную удельную влажность в модуль 152 обучения через устройство 104 ввода/вывода. Виртуальный датчик 107 влажности использует основанную на физике/статистике модель черного ящика для оценки удельной влажности и представляет на рассмотрение свою оценку удельной влажности в модуль 150 обучения. Модуль обучения определяет разность между предоставленной извне истинной влажностью и оцененной влажностью. Модуль обучения затем выдает обновления параметров в виртуальный датчик 107 влажности. Оцененная влажность сравнивается с истинной влажностью повторно до тех пор, пока разность между двумя значениями не перестает уменьшаться. Режим обучения может выполняться во время производства; из условия чтобы, как только транспортное средство находится на дороге, виртуальный датчик влажности содержал в себе самые последние обновления параметров и был достаточным для оценки удельной влажности прямо по приведению в движение. Кроме того, обученный виртуальный датчик влажности может пересылаться с транспортного средства на транспортное средство или из автономного обучения на не обученное транспортное средство. В отличие от физического датчика влажности, который дрейфует со временем, виртуальный датчик никогда не дрейфует и может обновляться более новыми параметрами.
В других примерах, обучение может происходить на всем протяжении срока службы датчика, в качестве периодических обновлений, например, сопровождающих регулярные плановые техническое обслуживание и текущий ремонт. Со временем, фильтр становится более точным в местах, где он как правило обучается. С многочисленными транспортными средствами, выполняющими одну и ту же последовательность операций обучения в различных местоположениях, зарегистрированные данные влажности и обновления параметров из модуля обучения могут выгружаться и сохраняться на сервере облачной среды.
Далее, с обращением к фиг. 4, показана схема виртуального датчика влажности в режиме обновления. Как описано выше, собранные данные влажности и обновления параметров модуля обучения могут выгружаться на сервер облачной среды, когда имеется в распоряжении подходящее соединение. На фиг. 4, выполняется соединение между шиной обмена данными 13 транспортного средства и устройством 154 обновления программного обеспечения. Устройство обновления программного обеспечения может присоединяться беспроводным образом. В еще одном примере, устройство обновления программного обеспечения может быть присоединено через постоянное проводное соединение пользователем транспортного средства или техническим специалистом по обслуживанию, например, во время регулярного технического обслуживания и текущего ремонта.
Устройство 154 обновления программного обеспечения выгружает данные на и загружает данные с сервера 156 облачной среды. Совместное использование данных таким образом помогает сокращать время обучения виртуального датчика влажности, а также повышать точность, и повышать точность транспортного средства при выезде из своего родного региона. Например, если транспортное средство ведется в отдаленный регион с большими климатическими отличиями, полученные данные с транспортных средств, которые регулярно ездят по региону пункта назначения, могут использоваться при обучении транспортного средства или загружаться с сервера облачной среды, из условия чтобы современные данные имелись в распоряжении для извлечения оцененной удельной влажности. Это может повышать точность оцененной удельной влажности в неродном регионе, и также может минимизировать время выгрузки или обучения.
Далее, с обращением к фиг. 5, показана схема многочисленных транспортных средств, отправляющих и принимающих собранные данные на сервер облачной среды. Таким образом, виртуальный датчик влажности по настоящему раскрытию может часто обновляться. Сервер облачной среды присоединяется к многочисленным транспортным средствам и принимает параметры обучения в подключенном режиме с каждого из них, когда они обновляются. Агрегация обучения в подключенном режиме используется для создания нового поколения виртуальных датчиков, которые отправляются на транспортные средства, когда они обновляются. Последовательность операций может непрерывно обновлять виртуальный датчик и сервер облачной среды.
Обучение и обновление виртуального датчика влажности в соответствии с настоящим раскрытием может происходить до момента эксплуатации транспортного средства и непрерывно на всем протяжении срока службы виртуального датчика влажности до тех пор, пока может устанавливаться соединение сервера облачной среды. В случае новых транспортных средств, автономно обученный виртуальный датчик может быть установлен на одно из вычислительных устройств транспортного средства. Если транспортное средство оборудовано для приема внешних данных или имеет существующий физический датчик влажности, виртуальный датчик влажности будет продолжать обучаться, в то время как он принимает внешние данные, таким образом, улучшая свою точность. Периодически, датчик может обновляться в процессе, который удаляет и сохраняет старый виртуальный датчик и заменяет его новым датчиком. Старый датчик комбинируется со старыми датчиками с других транспортных средств и исторической информацией о погоде, и используется для обучения следующего поколения виртуальных датчиков. Таким образом, каждое следующее одно за другим поколение датчиков обучает следующее поколение датчиков в процессе непрерывного улучшения. Обученные датчики могут выгружаться в облачную среду периодически и улучшаться благодаря процессу испытания на пригодность (генетических алгоритмов) и/или слияния данных параметров посредством статистической регрессии. Модель черного ящика может улучшаться и обучаться по отношению к нейронным сетям без улучшений. Улучшенные нейронные сети затем могут возвращаться на транспортные средства во время обновлений процедур. Обученные параметры датчика также могут обмениваться между транспортными средствами с использованием связи между транспортными средствами с помощью устройств ближнего действия, таких как DSRC (специализированная связь на коротких расстояниях), или устройств дальнего действия, таких как спутниковые информационные службы.
Фиг. 6-8 показывают данные влажности в качестве мольного процента Н2О (который отличается от удельной влажности на мультипликативный коэффициент) по разным датам. Фигуры дают примерные данные, которые могут выдаваться в виртуальный датчик влажности или выгружаться в виртуальный датчик влажности при производстве транспортного средства и возможном обновлении во время регулярного запланированного технического обслуживания и текущего ремонта. В этом примере, примерной моделью черного ящика является синусоидальная кривая с временем цикла в один год и 3 обучаемыми параметрами, выводимыми из регрессии; фазовой задержкой, амплитудой и средней влажностью. Может быть создан подобный график разностей между измеренными данными и предсказанным результатом, и синусоидальная или другая кривая может быть подобрана по точкам к разностям для оценки стохастической изменчивости или вероятностной влажности, описанных выше. В контроллере могут храниться данные параметров, полученные в фазе обучения с соединением, или могут собираться и сохраняться виртуальным датчиком влажности по своим собственным оценкам. Более того, упомянутые данные могут выгружаться на сервер облачной среды и совместно использоваться с транспортными средствами, например, по мере того, как они попадают в новый регион, или при обновлении следующего поколения виртуальных датчиков. Фиг. 6 показывает суточную верхнюю, нижнюю и среднюю влажность для города Детройт, штат Мичиган, с наиболее точно подобранной синусоидальной функцией. Фиг. 7 показывает среднюю влажность и наиболее точно подобранную синусоидальную функцию для Хьюстона, штат Техас. А фиг. 8 показывает суточную верхнюю, нижнюю и среднюю влажность для города Финикс, штат Аризона, с наиболее точно подобранной синусоидальной функцией. Далее, с обращением к фиг. 9, показан способ 900 для нормального рабочего режима виртуального датчика влажности. На 902, стандартный входной сигнал датчика принимается шиной обмена данными транспортного средства. Этот входной сигнал может быть любого типа, описанного выше, в том числе, GPS, давлением MAP, состоянием стеклоочистителя, температурой, и т.д. На 904, текущие данные, собранные с разных бортовых датчиков, сравниваются с текущими данными, принятыми в логическом блоке транспортного средства. На 906, оценивается удельная влажность. Как описано выше в ходе ссылки на таблицу 1, исторические данные могут быть известны для высоты, местоположения, времени года, времени суток и температуры окружающей среды в регионе, среди других условий. По этим и другим данным, а также соответствующим историческим данным, может оцениваться удельная влажность. На 908, удельная влажность широковещательно передается на шину обмена данными 13 транспортного средства. На 910, на основании оцененной удельной влажности, могут настраиваться средства управления силовой передачей. В качестве неограничивающих примеров, интенсивность EGR и событие установки момента зажигания могут изменяться на основании удельной влажности, как описано выше.
Далее, с обращением к фиг. 10, показан способ 1000 для режима обучения виртуального датчика влажности. На 1002, оценивается, имеется ли в распоряжении соединение. Соединение может быть фиксированным проводным или беспроводным соединением и может устанавливаться между логическим блоком транспортного средства и сетью Интернет, спутниковой радиостанцией, или радиостанцией IBOC, или другим источником данных, пригодным для сообщения измеренной удельной влажности на шину обмена данными транспортного средства. Если соединения нет в распоряжении (Нет), способ заканчивается. Если соединение имеется в распоряжении (Да), способ переходит на 1004.
На 1004, оценивается удельная влажность (как на этапе 908 по фиг. 9). Затем, на 1006, истинное значение влажности принимается логическим блоком транспортного средства через соединение. Оцененная влажность (с 1004) и измеренная влажность (с 1006) затем сравниваются на 1008. На 1010, этапы 1004-1008 повторяются с незначительными изменениями в отношении параметров оценки.
На 1012, производится сравнение между разностью между двумя самыми последними оценками влажности и измеренной влажностью. Если разность между самой последней оценкой и измеренной влажностью является меньшей, чем разность между предыдущей оценкой и измеренной влажностью (Да), способ возвращается на 1010, чтобы повторять этапы оценки с дальнейшими изменениями в отношении параметров. Это повторяется до тех пор, пока разность между оценкой и измеренной влажностью не продолжает уменьшаться. Когда разность влажности не является меньшей, чем предыдущее сравнение (Нет), способ переходит на этап 1014.
На этапе 1014, виртуальный датчик влажности обновляет свои параметры оценки, а кроме того, выгружает параметры обновления на сервер облачной среды на этапе 1016, поэтому, они могут рассматриваться в обновленном варианте виртуального датчика влажности и иметься в распоряжении у других транспортных средств. Способ затем заканчивается.
Со ссылкой на фиг. 11, показан способ 1100 для виртуального датчика влажности в режиме обновления. В режиме обновления, сервер облачной среды предоставляет виртуальную влажность, выгружает обновления параметров модуля обучения и собранные данные влажности на сервер облачной среды, внешний для транспортного средства, в котором расположена силовая передача, выгрузка происходит во время эксплуатации транспортного средства, и при этом, обновления параметров модуля обучения и собранные данные влажности формируются во время эксплуатации транспортного средства.
На 1102, оценивается, имеется ли в распоряжении соединение. Соединение может быть проводным или беспроводным, присоединяющим логический блок транспортного средства к сети Интернет. Если соединения нет в распоряжении (Нет), в таком случае, способ заканчивается. Если соединение имеется в распоряжении (Да), способ переходит на этап 1104, где обновленные параметры оценки из режима обучения выгружаются в облачную среду. На 1106, собранные данные влажности из эксплуатации виртуального датчика влажности также выгружаются в облачную среду, расширяя имеющиеся в распоряжении данные, которые возможно могут использоваться в будущих оценках влажности. На 1108, оценивается, есть ли имеющиеся обновления версии. Таковые могут включать в себя обновленные наборы данных о климате или обновленные алгоритмы оценки влажности, которые были разработаны в ответ на обратную связь с многочисленных транспортных средств, по мере того, как выгрузка на сервер облачной среды выполняется многочисленными транспортными средствами, увеличивая имеющиеся в распоряжении данные влажности и обновления параметров модуля обучения. Если обновлений нет в распоряжении (Нет), способ затем заканчивается. Если есть обновления, имеющиеся в распоряжении (Да), обновления загружаются на 1109, и способ затем заканчивается.
Предусмотрены системы и способы для настройки компонента силовой передачи двигателя в ответ на влажность окружающей среды, влажность окружающей среды основана на положении транспортного средства в регионе, температуре окружающей среды и исторических данных влажности по такому региону для текущего времени года. Это может успешно выполняться, не полагаясь на дорогостоящий и зачастую неуравновешенный физический датчик влажности. Модули обучения и обновления облачной среды дополнительно повышают точность виртуального датчика влажности по настоящему раскрытию.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машинно-читаемого запоминающего носителя в системе управления двигателем.
Будет принято во внимание, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Фактически, транспортные средства с приводом от аккумуляторных батарей, которые не имеют никакого двигателя, могут использовать предмет настоящего раскрытия для управления климатом внутри кабины. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И СИЛОВОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2673296C2 |
| СПОСОБ ДЛЯ ОЦЕНИВАНИЯ ВЛАЖНОСТИ ОКРУЖАЮЩЕЙ СРЕДЫ | 2015 |
|
RU2696843C2 |
| Способ обеспечения измерения влажности | 2016 |
|
RU2689227C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ РАБОТЫ ДВИГАТЕЛЯ В ЗАВИСИМОСТИ ОТ МЕТЕОДАННЫХ | 2017 |
|
RU2674545C2 |
| СИСТЕМА УПРАВЛЕНИЯ И ВЫЧИСЛЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2654162C2 |
| СПОСОБ ЗАПРАВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2714215C2 |
| СПОСОБ ОЦЕНКИ ВЛАЖНОСТИ ОКРУЖАЮЩЕЙ СРЕДЫ (ВАРИАНТЫ) | 2013 |
|
RU2610359C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ФИЛЬТРА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2717575C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОЦЕНКИ ВНЕШНЕГО ДАВЛЕНИЯ ПРИ ПОМОЩИ КИСЛОРОДНОГО ДАТЧИКА | 2016 |
|
RU2677915C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ КЛАССИФИКАЦИИ ТИПА И ВЕСА ПРИЦЕПА, БУКСИРУЕМОГО АВТОМОБИЛЕМ | 2017 |
|
RU2710464C2 |








Группа изобретений относится к датчикам влажности для транспортных средств. Технический результат – создание точного виртуального датчика влажности. Для этого предложен способ использования оцененной влажности окружающей среды в транспортном средстве, содержащий этапы, на которых: настраивают компонент силовой передачи двигателя в ответ на барометрическое давление и оцененную влажность окружающей среды, причем оцененная влажность окружающей среды основана на каждом из местоположения транспортного средства в регионе, текущего времени дня и/или года, температуры окружающей среды и данных по региону для текущего времени дня и/или года, сохраненных в памяти контроллера; определяют различия между измеренной влажностью и оцененной влажностью; обновляют параметры оценки, используемые для оценки оцененной влажности на основе определенной разницы; и загружают обновленные параметры оценки и полученные данные влажности на сервер облачной среды. 3 н. и 16 з.п. ф-лы, 11 ил., 1 табл.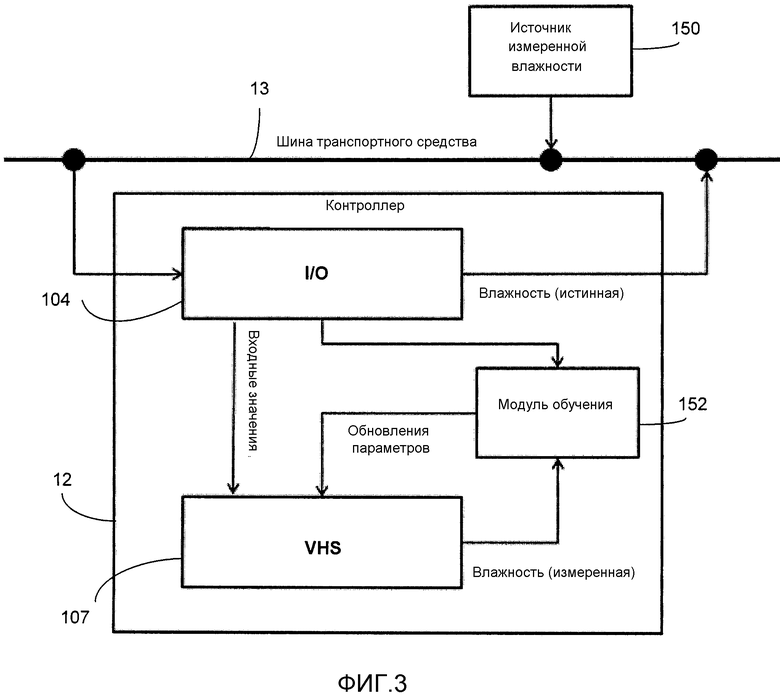
1. Способ использования оцененной влажности окружающей среды в транспортном средстве, содержащий этапы, на которых:
настраивают компонент силовой передачи двигателя транспортного средства в ответ на барометрическое давление и оцененную влажность окружающей среды, причем оцененная влажность окружающей среды основана на каждом из местоположения транспортного средства в регионе, текущего времени дня и/или года, температуры окружающей среды и данных по региону для текущего времени дня и/или года, сохраненных в памяти контроллера;
определяют различия между измеренной влажностью и оцененной влажностью, причем измеренная влажность принимается контроллером, когда контроллер подключен к источнику данных, внешнему по отношению к транспортному средству;
обновляют параметры оценки, используемые для оценки оцененной влажности на основе определенной разницы; и
загружают обновленные параметры оценки и полученные данные влажности на сервер облачной среды, внешний для транспортного средства, причем загрузка происходит во время работы транспортного средства, и причем обновленные параметры оценки и полученные данные влажности формируются во время работы транспортного средства из оценки оцененной влажности.
2. Способ по п. 1, в котором настройка компонента силовой передачи двигателя содержит настройку скорости рециркуляции выхлопных газов на основе оцененной влажности путем настройки компонента системы рециркуляции отработавших газов, причем система рециркуляции отработавших газов направляет желаемую часть выхлопного газа из выпускного канала во впускной коллектор через канал рециркуляции отработавших газов, содержащий клапан рециркуляции отработавших газов.
3. Способ по п. 2, в котором настройка компонента силовой передачи двигателя состоит в том, что настраивают установку момента зажигания двигателя.
4. Способ по п. 1, дополнительно состоящий в том, что принимают входные данные от бортовых компонентов, связанных с шиной транспортного средства, причем вход включает в себя по меньшей мере одно из местоположения транспортного средства, показания часов, температуры окружающей среды и исторических данных влажности.
5. Способ по п. 1, в котором компонент силовой передачи двигателя расположен в транспортном средстве, передвигающемся по дороге, причем способ дополнительно содержит этап, на котором настраивают влажность окружающей среды на основании данных, обмениваемых с компьютерной сетью, внешней для транспортного средства.
6. Способ по п. 5, в котором данные для региона для текущего времени дня и/или года включают в себя исторические данные влажности и дополнительно содержат обновление исторических данных влажности, сохраненных в памяти контроллера, на основе данных, обмениваемых в компьютерной сети.
7. Система использования оцененной влажности окружающей среды в транспортном средстве, содержащая:
шину транспортного средства, предназначенную для подключения к измеренному источнику влажности;
датчики работы транспортного средства и состояния транспортного средства, соединенные с шиной транспортного средства;
модуль обучения, подсоединенный к шине транспортного средства для сравнения измеренной влажности, полученной от измеренного источника влажности, с оцененной влажностью; и
компьютерно-читаемый носитель данных с логическим блоком, подсоединенный к шине транспортного средства и содержащий инструкции, хранящиеся на нем, для:
определения оцененной влажности на основе входных значений от одного или нескольких датчиков работы транспортного средства и состояния транспортного средства и сохраненных исторических данных влажности;
обновления параметров оценки, используемых для определения оцененной влажности, на основе сравнения измеренной влажности и оцененной влажности на модуле обучения; и
загрузки обновленных параметров оценки из модуля обучения и полученных данных влажности из работы виртуального датчика влажности на сервер облачной среды, внешний для транспортного средства.
8. Виртуальный датчик влажности по п. 7, в котором датчики состояния транспортного средства содержат глобальную систему определения местоположения, и причем датчики работы двигателя содержат барометрический датчик абсолютного давления.
9. Виртуальный датчик влажности по п. 7, в котором инструкции дополнительно содержат инструкции для случая, когда доступно соединение между сервером облачной среды и виртуальным датчиком влажности, загружать обновленные данные в виртуальный датчик влажности, причем обновленные данные включают в себя один или несколько обновленных наборов климатических данных или обновленных алгоритмов оценок влажности.
10. Виртуальный датчик влажности по п. 7, в котором датчики состояния транспортного средства содержат датчик состояния стеклоочистителя, и причем сохраненные исторические данные влажности хранятся в памяти логического блока.
11. Виртуальный датчик влажности по п. 7, в котором источник измеренной влажности представляет собой данные из Интернет-соединения с логическим блоком.
12. Виртуальный датчик влажности по п. 7, в котором источник измеренной влажности представляет собой данные от спутниковой радиостанции, соединенной посредством проводной или беспроводной связи с логическим блоком.
13. Виртуальный датчик влажности по п. 7, в котором измеренный источник влажности представляет собой данные из радиостанции IBOC, соединенной посредством проводного или беспроводного соединения с логическим блоком.
14. Способ сбора оценок влажности окружающей среды, содержащий этапы, на которых:
оценивают влажность на основе данных транспортного средства на борту транспортного средства, причем данные транспортного средства содержат глобальную систему определения местоположения, температуру окружающей среды, барометрическое давление, и сохраненные данные влажности, справочные таблицы и формулы; и
загружают полученные оценки влажности и обновления параметров модуля обучения на сервер облачной среды, внешний для транспортного средства.
15. Способ по п.14, дополнительно содержащий подключение к одному или нескольким Интернет-соединениям и радиостанции IBOC, при доступности, для приема влажности, измеренной извне.
16. Способ по п.15, в котором обновления параметров модуля обучения обновляются параметрами оценки для оценки влажности и дополнительно содержат определение обновленных параметров оценки на основе сравнения между оцененной влажностью и полученной извне измеренной влажностью.
17. Способ по п.14, в котором данные транспортного средства дополнительно содержат дату, время и высоту.
18. Способ по п.15, в котором оценка выполняется с помощью виртуального датчика влажности, включенного в контроллер транспортного средства, и дополнительно содержит обучение виртуального датчика влажности до использования транспортного средства, при этом обучение виртуального датчика влажности содержит оценку влажности, повторяющуюся до тех пор, пока разность между оцененной влажностью и полученной извне измеренной влажностью перестанет уменьшаться с каждым повторением.
19. Способ по п.14, в котором сервер облачной среды выполнен с возможностью соединения с множеством транспортных средств и получения параметров обучения в подключенном режиме от каждого из них, когда они обновляются, причем способ дополнительно содержит загрузку информации от сервера облачной среды и оценку влажности на основе загруженной информации.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2469878C2 |

