ОБЛАСТЬ ТЕХНИКИ
Настоящая заявка относится к системам и способам для улучшения калибровки выходного параметра двигателя и силовой передачи.
УРОВЕНЬ ТЕХНИКИ
Системы управления двигателем могут использовать различные калибровочные таблицы и многомерные характеристики для оптимизации выходного параметра двигателя и силовой передачи по мере того, как условия эксплуатации изменяются в течение ездового цикла. Например, системы транспортного средства могут предварительно устанавливаться многомерными характеристиками двигателя, которые используются системой управления двигателем для определения, каким образом планировать различные исполнительные механизмы. Калибровочные многомерные характеристики и таблицы могут быть заполнены данными, собранными во время проектирования, испытаний и проведения экспериментов с двигателем и силовой передачей. В дополнение, системам управления двигателем может быть дана возможность адаптировать и обновлять калибровочные таблицы измерениями и данными обратной связи.
Однако, с силовыми передачами и двигателями внутреннего сгорания, становящимися все более и более сложными, может быть много степеней свободы для оптимизации выходного параметра двигателя и силовой передачи. Например, могут быть различные комбинации регулируемой установки фаз кулачкового распределения, регулируемой системы впуска, регулируемого подъема клапанов, и т. д., которые возможны. В двигателях со сложными системами, может требовать значимо длительного времени (например, более чем год времени испытаний), чтобы построить многомерные характеристики всех возможных комбинаций работы. Некоторые системы транспортного средства могут быть выполнены с возможностью самокалиброваться. В них, датчики давления внутри цилиндра могут использоваться для самокалибровки двигателя по непереработанной (исходной) многомерной характеристике двигателя. Поскольку процесс сгорания является довольно непостоянным, многочисленные измерения должны производиться в достаточно установившихся условиях, чтобы получать достоверные средние значения выходных сигналов датчиков, которые могут уверенно использоваться для обновления многомерной характеристики двигателя и определения управляющих воздействий. Однако, кривые выбросов, экономии топлива и привода имеют тенденцию быть переходными по природе, проводя мало времени в установившихся условиях, где могли бы производиться адаптации. Как результат, самокалибрующиеся транспортные средства могут требовать многих ездовых циклов для выполнения калибровки.
В еще одном примере, как показано Локвудом и другими в заявке 2013/0184966 на выдачу патента США, данные, захваченные на борту транспортного средства во время работы двигателя, могут обрабатываться бортовым контроллером, а также внебортовым контроллером (таким как внебортовая облачная вычислительная система). Это предоставляет возможность для требующей меньшего объема вычислений обработки на борту параметров (например, совместных адаптаций) и параллельной требующей большего объема вычислений обработки внебортовой обработки параметров (например, отдельных адаптаций). Одновременная обработка предоставляет возможность для более быстрого заполнения калибровочной таблицы наряду с сохранением мощности обработки и конфигурации памяти бортовой системы управления транспортным средством.
Однако, изобретатели в материалах настоящей заявки осознали, что даже при самокалибровке и внебортовой обработке, калибровочные таблицы могут не заполняться в достаточной мере эффективным по времени образом. В дополнение к длительным временам, требуемым для транспортных средств с самокалибровкой и внебортовой обработкой, могут быть области калибровочных многомерных характеристик двигателя и силовой передачи, которые остаются недостаточно заполненными на основании стиля вождения водителя транспортного средства. Например, агрессивные водители могут иметь области высокого числа оборотов и высокой нагрузки своих калибровочных многомерных характеристик вполне определенными наряду с тем, что другие рабочие области не вполне определены. В качестве еще одного примера, водитель, всегда осуществляющий эксплуатацию в жарких и сухих климатических зонах, может не иметь достаточных адаптаций калибровки для влажных и холодных условий окружающей среды. По существу, до того, как выполнена проверка экономии топлива, транспортное средство должно адаптироваться в пределах нескольких ездовых циклов. Кроме того, калибровка должна достаточно быстро доводиться до состояния зрелости, чтобы транспортное средство успешно проходило по выбросам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном из примеров, некоторые из вышеприведенных проблем могут быть препоручены способу для системы двигателя, содержащему: настройку точек данных калибровочной таблицы силовой передачи транспортного средства с использованием данных, собранных на борту транспортного средства, и с использованием данных, загруженных из внебортовой сети, загруженные данные собираются на борту одного или более других транспортных средств, поддерживающих связь с сетью. Внебортовая сеть, например, может быть облачной вычислительной системой. Таким образом, облачная калибровка может преимущественно использоваться для более полного заполнения калибровочных таблиц двигателя за более короткое время.
Например, первая фаза облачной калибровки может выполняться во время разработки транспортного средства производителем, чтобы добиваться быстрой калибровки для успешного прохождения всех требований по выбросам. На ней может совершенствоваться калибровочная таблица для нового транспортного средства, такого как новый тип (марка или модель) или новое семейство транспортных средств. В этом отношении, перед продажей транспортного средства потребителю, калибровочная таблица может заполняться калибровочными данными, собранными на борту парка транспортных средств одних и тех же марки и модели, совершенствуемых и калибруемых производителем. Калибровочные данные, собранные на борту каждого транспортного средства в парке транспортных средств, могут выгружаться в облачную вычислительную систему. Контроллер отдельного транспортного средства может загружать значимые данные и быстро обновлять исходную калибровочную таблицу транспортного средства.
Вторая фаза облачной калибровки может выполняться после того, как транспортное средство находится на руках потребителя, чтобы дополнительно оптимизировать рабочие характеристики транспортного средства касательно экономии топлива, выбросов и ездовых качеств. Вторая фаза облачной калибровки также учитывает старение, износ компонентов и дает диагностическим процедурам возможность инициироваться по мере надобности. На ней исходная калибровочная таблица (таблица, с которой изначально приходит транспортное средство) может обновляться. Например, парк транспортных средств, находящихся в использовании соответственными потребителями, может собирать калибровочные данные в различных условиях эксплуатации во время передвижения по дороге. Калибровочные данные из каждого транспортного средства из парка могут выгружаться в облачную вычислительную систему и храниться там. В дополнение, калибровочные данные для отдельных транспортных средств могут храниться в памяти их соответственного контроллера. Каждое транспортное средство в таком случае может преимущественно загружать данные, сформированные на борту других транспортных средств с согласующимися характеристиками силовой передачи, чтобы адаптировать свои соответственные калибровочные таблицы. Например, первое транспортное средство может иметь достаточные сформированные на борту данные, соответствующие первой области калибровочной таблицы силовой передачи данного транспортного средства. Соответственно, контроллер транспортного средства может заполнять первую область калибровочной таблицы собранными на борту данными. Достаточные бортовые данные могут формироваться вследствие того, что первое транспортное средство проводит большее, чем пороговая величина времени, в условиях эксплуатации (например, условиях числа оборотов-нагрузки), соответствующих первой области калибровочной таблицы. Однако первое транспортное средство может иметь недостаточные сформированные на борту данные, соответствующие второй, отличающейся рабочей области калибровочной таблицы. Недостаточные данные могут формироваться вследствие того, что транспортное средство проводит меньшее, чем пороговая величина времени, в условиях эксплуатации, соответствующих второй области калибровочной таблицы. Поэтому, контроллер может идентифицировать одно или более других транспортных средств, таких как второе транспортное средство, в парке, имеющих согласующиеся характеристики силовой передачи, и чья калибровочная таблица имеет достаточные данные, заполняющие вторую область калибровочной таблицы. По существу, расхождение может быть обусловлено различиями стилей вождения между водителями первого транспортного средства и второго транспортного средства. Например, водитель первого транспортного средства может стремиться совершать более длинные поездки по автомагистралям наряду с тем, что водитель второго транспортного средства может иметь склонность совершать более короткие поездки в городе. Таким образом, в то время как первое транспортное средство может иметь большие времена пребывания в условиях высокого числа оборотов и высокой нагрузки, второе транспортное средство может иметь большие времена пребывания в условиях низкого числа оборотов и высокой нагрузки. Контроллер первого транспортного средства затем может загружать данные, собранные на борту второго транспортного средства, для заполнения второй области своей калибровочной таблицы. Настройки исполнительных механизмов транспортного средства для первого транспортного средства в таком случае могут выполняться на основании обновленной калибровочной таблицы. Таким образом, калибровочная таблица транспортного средства, эксплуатируемого для поездок на длинное расстояние по автомагистрали, может доводиться до состояния зрелости данными, захваченными на транспортном средстве, эксплуатируемом для коротких поездок в пределах города. В качестве еще одного примера калибровочные таблицы транспортного средства, эксплуатируемого в жарких и сухих погодных условиях, могут настраиваться или «доводиться до состояния зрелости» данными, захваченными на транспортном средстве, эксплуатируемом в жарких и влажных погодных условиях. По существу, данные, относящиеся к многим разным аспектам рабочих характеристик и адаптации транспортного средства, могут использоваться для улучшения работы транспортного средства.
Таким образом, полные многомерные характеристики двигателя, покрывающие большее количество степеней свободы, могут формироваться быстрее. Полагаясь на данные, захваченные на борту одного или более других транспортных средств, имеющих согласующиеся характеристики, калибровочные данные, относящиеся к условиям эксплуатации и маневрам при вождении, не испытываемым часто на данном транспортном средстве, могут импортироваться с других транспортных средств. Посредством использования глобальных данных для заполнения большинства условий эксплуатации калибровочной таблицы транспортного средства, рабочие характеристики транспортного средства в таких условиях могут улучшаться. В дополнение, локальные адаптации могут использоваться для точной настройки рабочих характеристик транспортного средства. По существу, это дает средней оценке адаптации возможность выдаваться быстрее наряду с более быстрой адаптацией к нестабильности параметров серийных изделий отдельным транспортным средством. В дополнение, посредством использования данных из одного или более других транспортных средств во время начальной фазы развития калибровочной таблицы, достаточное количество отсчетов выборки данных могут выдаваться по существу для всех точек числа оборотов-нагрузки, требуемых для проверки состава выбросов. По существу, это улучшает уровень доверия данных, наполняющих калибровочную таблицу транспортного средства, и повышает вероятность успешного прохождения транспортным средством проверки состава выбросов. В общем и целом, улучшается точность калибровки двигателя и силовой передачи, улучшая рабочие характеристики транспортного средства.
В частности, раскрыт способ, состоящий в том, что: настраивают точки данных калибровочной таблицы силовой передачи транспортного средства с использованием данных, собранных на борту транспортного средства, и с использованием данных, загруженных из внебортовой сети, причем загруженные данные собираются на борту одного или более других транспортных средств, поддерживающих связь с сетью.
В дополнительном аспекте настройка точек данных заключается в том, что настраивают каждую точку данных калибровочной таблицы силовой передачи транспортного средства, и при этом каждая точка данных упомянутой калибровочной таблицы силовой передачи включает в себя одно из выходного параметра двигателя и выходного параметра трансмиссии.
В другом дополнительном аспекте данные, собранные на борту транспортного средства, включают в себя данные, собранные на борту транспортного средства, находящегося в использовании потребителем, и при этом загруженные данные собираются на борту одного или более других транспортных средств, находящихся в использовании соответственными потребителями.
В еще одном дополнительном аспекте упомянутая калибровочная таблица включает в себя множество ячеек, причем каждая из множества ячеек соответствует по меньшей мере двум условиям эксплуатации, условия эксплуатации включают в себя по меньшей мере два из числа оборотов двигателя, нагрузки двигателя, температуры двигателя, барометрического давления, содержания спирта в топливе, влажности окружающей среды и октанового числа топлива.
В еще одном дополнительном аспекте настройка точек данных упомянутой калибровочной таблицы заключается в том, что, когда время пребывания транспортного средства в условиях эксплуатации для данной ячейки больше, чем пороговое значение, заполняют упомянутую калибровочную таблицу данными, собранными на борту транспортного средства в условиях эксплуатации для данной ячейки.
В еще одном дополнительном аспекте настройка точек данных упомянутой калибровочной таблицы дополнительно заключается в том, что, когда время пребывания транспортного средства в условиях эксплуатации для данной ячейки меньше, чем пороговое значение, загружают данные, собранные для данной ячейки на борту одного или более других транспортных средств, имеющих время пребывания большее, чем пороговое значение, в условиях эксплуатации для данной ячейки и заполняют данную ячейку упомянутой калибровочной таблицы на основании загруженных данных.
В еще одном дополнительном аспекте внебортовая сеть включает в себя облачную вычислительную систему.
В еще одном дополнительном аспекте упомянутое транспортное средство также поддерживает связь с внебортовой сетью, дополнительно состоящий в том, что выгружают данные, собранные на борту упомянутого транспортного средства, во внебортовую сеть.
В еще одном дополнительном аспекте выходные данные калибровочной таблицы силовой передачи транспортного средства включают в себя одно из выходного параметра двигателя, выходного параметра исполнительного механизма двигателя, выходного параметра трансмиссии, выходного параметра исполнительного механизма трансмиссии и выходного параметра электродвигателя гибридного привода.
В еще одном дополнительном аспекте выходной параметр двигателя включает в себя одно или более из числа оборотов двигателя и нагрузки двигателя, при этом выходной параметр исполнительного механизма двигателя включает в себя одно или более из установки фаз клапанного распределения, установки фаз кулачкового распределения, установки момента впрыска, величины впрыска, интенсивности EGR, соотношения разделения впрыска топлива, опережения зажигания и давления наддува, при этом выходной параметр трансмиссии включает в себя одно или более из выбора передачи и плана переключения, и при этом выходной параметр исполнительного механизма трансмиссии включает в себя одно или более из давления в магистрали трансмиссии, характеристик соленоида переключения, интенсивности блокировки гидротрансформатора, интенсивности пробуксовки муфты трансмиссии.
В еще одном дополнительном аспекте одно или более других транспортных средств имеют характеристики силовой передачи, согласующиеся с характеристиками силовой передачи упомянутого транспортного средства, и при этом настройка заключается в том, что осуществляют автоматическую настройку во время инициирования ездового цикла транспортного средства, завершения ездового цикла транспортного средства или во время запланированного обновления.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что, во время эксплуатации транспортного средства, настраивают один или более исполнительных механизмов двигателя и силовой передачи на основании условий эксплуатации двигателя и дополнительно на основании настроенной калибровочной таблицы транспортного средства.
Также раскрыт способ, состоящий в том, что: выгружают данные, собранные на борту каждого из первого и второго транспортных средств, имеющих согласующиеся характеристики силовой передачи, во внебортовую сеть; заполняют первую область первой калибровочной таблицы первого транспортного средства с использованием данных, собранных на борту первого транспортного средства; и загружают данные, собранные на борту второго транспортного средства, из внебортовой сети для заполнения второй области первой калибровочной таблицы.
В дополнительном аспекте первая область первой калибровочной таблицы соответствует первому набору условий эксплуатации, и при этом заполнение первой области с использованием данных, собранных на борту первого транспортного средства, происходит в ответ на то, что первое транспортное средство пребывает дольше, чем пороговая величина времени, с первым набором условий эксплуатации.
В другом дополнительном аспекте вторая область первой калибровочной таблицы соответствует второму набору условий эксплуатации, отличному от первого набора условий эксплуатации, и при этом заполнение второй области с использованием данных, собранных на борту второго транспортного средства, происходит в ответ на то, что первое транспортное средство пребывает меньше, чем пороговая величина времени, во втором наборе условий эксплуатации, и второе транспортное средство, пребываете дольше, чем пороговая величина времени, во втором наборе условий эксплуатации.
В еще одном дополнительном аспекте способ дополнительно состоит в том, что выгружают данные, собранные на борту третьего транспортного средства, имеющего согласующиеся характеристики силовой передачи, во внебортовую сеть; и дополнительно заполняют вторую область первой калибровочной таблицы первого транспортного средства с использованием взвешенных данных, собранных на борту третьего транспортного средства, причем взвешенные данные основаны на времени пребывания третьего транспортного средства во втором наборе условий эксплуатации относительно каждого из первого транспортного средства и второго транспортного средства.
В еще одном дополнительном аспекте упомянутая калибровочная таблица является калибровочной таблицей силовой передачи транспортного средства, причем способ дополнительно состоит в том, что, во время эксплуатации первого транспортного средства, настраивают регулировки одного или более исполнительных механизмов силовой передачи на основании первой калибровочной таблицы, заполненной данными, собранными на борту каждого из первого и второго транспортных средств.
Кроме того, раскрыта система транспортного средства, содержащая: двигатель; силовую передачу, присоединенную между двигателем и колесами транспортного средства; один или более исполнительных механизмов, выполненных с возможностью изменять выходной параметр силовой передачи; модуль связи для присоединения системы транспортного средства с возможностью обмена информацией к внебортовой облачной сети; и контроллер с машинно-читаемыми командами, содержащимися в постоянной памяти, для: сохранения данных, сформированных на борту транспортного средства, локально, также наряду с выгрузкой сформированных на борту данных во внебортовую облачную сеть; на основании условий эксплуатации, в которых данные были сформированы на борту транспортного средства, и дополнительно на основании времени пребывания транспортного средства в условиях эксплуатации, заполнения одной или более ячеек калибровочной таблицы силовой передачи; и загрузки данных, соответствующих незаполненным ячейкам упомянутой калибровочной таблицы, из внебортовой облачной сети, причем загруженные данные сформированы на борту одного или более других транспортных средств; и настройки регулировок для одного или более исполнительных механизмов на основании упомянутой калибровочной таблицы.
В дополнительном аспекте заполнение на основании условий эксплуатации и времени пребывания транспортного средства включает в себя заполнение ячейки сформированными на борту данными, если время пребывания транспортного средства в условиях эксплуатации, соответствующих ячейке, больше, чем пороговая величина, и не заполнение ячейки сформированными на борту данными, если время пребывания транспортного средства в условиях эксплуатации, соответствующих ячейке, меньше, чем пороговая величина.
В другом дополнительном аспекте загрузка включает в себя загрузку данных, сформированных на борту одного или более других транспортных средств, имеющих большее, чем пороговая величина, время пребывания в условиях эксплуатации, соответствующих незаполненным ячейкам упомянутой калибровочной таблицы, причем одно или более других транспортных средств имеют характеристики силовой передачи, которые согласуются с таковыми упомянутого транспортного средства.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен реализациями, которые кладут конец каким-нибудь недостаткам, отмеченным выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематически показывает аспекты примерной системы двигателя в соответствии с вариантом осуществления этого раскрытия.
Фиг. 2 - местный вид двигателя.
Фиг. 3 показывает высокоуровневую блок-схему последовательности операций способа для адаптивной калибровки силовой передачи транспортного средства.
Фиг. 4 показывает блок-схему последовательности операций способа для обновления калибровочной таблицы согласно настоящему раскрытию.
Фиг. 5 показывает блок-схему последовательности операций способа для настройки выходного параметра силовой передачи транспортного средства на основании обновленной калибровочной таблицы.
Фиг. 6 показывает примерную адаптацию калибровочной таблицы.
ПОДРОБНОЕ ОПИСАНИЕ
Предусмотрены способы и системы для ускорения обновления одной или более калибровочных таблиц, используемых для оптимизации выходного параметра силовой передачи в системе транспортного средства, такой как система транспортного средства по фиг. 1. В одном из неограничивающих примеров, двигатель может быть сконфигурирован, как проиллюстрировано на фиг. 2, в которой двигатель включает в себя по меньшей мере один цилиндр, систему управления, турбонагнетатель и систему рециркуляции отработавших газов, в числе других признаков. Контроллер двигателя может быть выполнен с возможностью выполнять процедуру управления, такую как процедура по фиг. 3-5, для обновления калибровочной таблицы транспортного средства на основании бортовых данных и/или внебортовых сетевых данных и оптимизации выходного параметра силовой передачи транспортного средства на основании обновленной калибровочной таблицы. Внебортовые сетевые данные могут загружаться из внебортовой сетевой системы, изображенной на фиг. 1-2. Примерная адаптация калибровочной таблицы транспортного средства показана на фиг. 6.
Фиг. 1 изображает систему 100 транспортного средства, включающую в себя двигатель 10 внутреннего сгорания, присоединенный к трансмиссии 44. Двигатель 10 может запускаться пусковой системой 54 двигателя, включающей в себя стартерный электродвигатель. Трансмиссия 44 может быть ручной трансмиссией, автоматической трансмиссией или их комбинацией. Трансмиссия 44 может включать в себя различные компоненты, такие как гидротрансформатор, узел главной передачи, набор шестерен, имеющий множество шестерен, и т.д. Трансмиссия 44 показана присоединенной к ведущим колесам 52, которые могут контактировать с поверхностью дороги.
В одном из вариантов осуществления, система 100 транспортного средства может быть транспортным средством с гибридным приводом, в котором трансмиссия 44, в качестве альтернативы, может приводиться в движение электродвигателем 50. Например, электродвигатель может быть электродвигателем с питанием от аккумуляторных батарей (как изображено), при этом электродвигатель 50 питается энергией, накопленной в аккумуляторной батарее 46. Другие устройства накопления энергии, которые могут использоваться для питания электродвигателя 50, включают в себя конденсатор, маховик, баллон высокого давления, и т.д. Устройство преобразования энергии, здесь, инвертер 48, может быть выполнен с возможностью преобразовывать выходную мощность постоянного тока (DC) аккумуляторной батареи 46 в выходную мощность переменного тока (AC) для использования электрическим двигателем 50. Электрический двигатель 50 может быть приведен в действие в режиме рекуперации, то есть, в качестве генератора, для поглощения энергии от движения транспортного средства и/или двигателя и преобразования поглощенной энергии в форму энергии, пригодную для накопления в аккумуляторной батарее 46. Более того, электрический двигатель 50 может приводиться в действие в качестве электродвигателя или генератора, по мере надобности, чтобы приращивать или поглощать крутящий момент во время перехода двигателя 10 между разными режимами сгорания (например, во время переходов между режимом искрового зажигания и режимом воспламенения от сжатия).
Когда сконфигурирована в варианте осуществления с гибридным приводом, система 100 транспортного средства может эксплуатироваться в различных режимах, в которых транспортное средство приводится в движение только двигателем, только электродвигателем или комбинации обоих. В качестве альтернативы, также могут применяться вспомогательно или умеренно гибридные варианты осуществления, в которых двигатель является основным источником крутящего момента, а электрический двигатель избирательно добавляет крутящий момент во время специфичных режимов, таких как во время события увеличения нагрузки на двигатель при неизменных оборотах. Например, во время режима «работающего двигателя», двигатель 10 может быть приведен в действие и использоваться в качестве основного источника крутящего момента для механического привода колес 52. Во время режима «работающего двигателя», топливо может подаваться в двигатель 10 из топливной системы 20, включающей в себя топливный бак. Топливный бак может хранить множество видов топлива, таких как бензин, или топливные смеси, такие как топливо с некоторым диапазоном концентраций спиртов (например, этанола), в том числе, E10, E85, и т.д., и их комбинации. В еще одном примере, во время режима «неработающего двигателя», электрический двигатель 50 может приводиться в действие для механического привода колес. Режим «неработающего двигателя» может применяться во время торможения, низких скоростей, во время остановки на светофорах, и т.д. В еще одном другом примере, во время режима «содействия», альтернативный источник крутящего момента может дополнять и действовать совместно с крутящим моментом, выдаваемым двигателем 10.
Система 100 транспортного средства дополнительно может включать в себя систему 14 управления. Система 14 управления показана принимающей информацию с множества датчиков 16 и отправляющей сигналы управления на множество исполнительных механизмов 81. Система 14 управления дополнительно может включать в себя контроллер 12. Контроллер может принимать входные данные с различных датчиков или кнопок, обрабатывать входные данные и приводить в действие исполнительные механизмы в ответ на обработанные входные данные, на основании команды или управляющей программы, запрограммированных в нем, соответствующих одной или более процедур. Примерные процедуры управления описаны в материалах настоящей заявки со ссылкой на фиг. 3-5.
Система управления транспортного средства может быть присоединена с возможностью обмена информацией к внебортовой сети 13, такой как облачная вычислительная система, с помощью беспроводной связи, которой может быть Wi-Fi, Bluetooth, тип услуги сотовой связи или протокол беспроводной передачи данных. По существу, эта возможность соединения, где выгружаются данные транспортного средства, также указываемая ссылкой как «облако», может быть коммерческим сервером или частным сервером, где данные сохраняются, а затем, подвергаются действию алгоритмов оптимизации. Алгоритм может обрабатывать данные из одиночного транспортного средства, парка транспортных средств, семейства двигателей, семейства силовых передач или их комбинации. Алгоритмы дополнительно могут учитывать системные ограничения, создавать калибровочные данные для оптимизации выходных параметров силовой передачи и отправлять их обратно на транспортное средство(а), где они применяются.
Система 100 транспортного средства также может включать в себя бортовую навигационную систему 17 (например, глобальную систему определения местоположения) на приборной панели 19, с которой может взаимодействовать водитель. Навигационная система может включать в себя один или более датчиков местоположения для содействия в оценке местоположения (например, географических координат) транспортного средства. Приборная панель 19 дополнительно может включать в себя водительский интерфейс 15 для зажигания, с помощью которого водитель транспортного средства может настраивать состояние зажигания транспортного средства. Более точно, водительский интерфейс для зажигания может быть выполнен с возможностью инициировать и/или завершать работу двигателя транспортного средства на основании входного сигнала водителя. Различные варианты осуществления водительского интерфейса для зажигания могут включать в себя интерфейсы, которые требуют физического устройства, такого как активный ключ, который должен вставляться в водительский интерфейс для зажигания, чтобы запускать двигатель и включать транспортное средство, или выниматься для глушения двигателя и выключения транспортного средства. Другие варианты осуществления могут включать в себя пассивный ключ, который с возможностью обмена информацией присоединен к водительскому интерфейсу для зажигания. Пассивный ключ может быть сконфигурирован в качестве электронного брелока для ключей или ключа с развитой логикой, которые не должны вставляться или выниматься из интерфейса для зажигания, чтобы эксплуатировать двигатель транспортного средства. Скорее, пассивному ключу может быть необходимым располагаться внутри или поблизости от транспортного средства (например, в пределах порогового расстояния от транспортного средства). Кроме того другие варианты осуществления дополнительно или в качестве альтернативы могут использовать кнопку пуска/останова, которая нажимается вручную водителем, чтобы запускать или глушить двигатель и включать или выключать транспортное средство. На основании конфигурации водительского интерфейса для зажигания, водитель транспортного средства может выдавать указание в отношении того, находится ли двигатель в состоянии включения двигателя или выключения двигателя, а кроме того, находится ли транспортное средство в состоянии включения транспортного средства или выключения транспортного средства.
Контроллер 12 также может принимать указание состояния зажигания двигателя 10 с датчика зажигания (не показан), присоединенного к водительскому интерфейсу для зажигания. Система 14 управления может быть выполнена с возможностью отправлять сигналы управления на исполнительные механизмы 81 на основании входных сигналов, принимаемых с датчиков и от водителя транспортного средства. Различные исполнительные механизмы, например, могут включать в себя топливные форсунки цилиндров, воздушный впускной дроссель, присоединенный к впускному коллектору двигателя, свечу зажигания, и т.д. Положения исполнительных механизмов могут настраиваться для оптимального выходного параметра силовой передачи транспортного средства во время работы двигателя на основании калибровочных данных, обновленных с использованием бортовых данных и/или внебортовых сетевых данных. Подробности об обновлении калибровочных данных для оптимального выходного параметра транспортного средства и силовой передачи конкретизированы на фиг. 3-5.
Фиг. 2 изображает примерный вариант осуществления камеры сгорания или цилиндра двигателя 10 (по фиг. 1). Двигатель 10 может принимать параметры управления из системы управления, включающей в себя контроллер 12, и входные данные от водителя 130 транспортного средства через устройство 132 ввода. В этом примере, устройство 132 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. В качестве еще одного примера, входной сигнал касательно состояния включения транспортного средства и/или включения двигателя может приниматься через водительский интерфейс 15 для зажигания, как обсуждено ранее со ссылкой на фиг. 1. Цилиндр 30 (в материалах настоящей заявки также «камера сгорания») двигателя 10 может включать в себя стенки 136 камеры сгорания с поршнем 138, расположенным в них. Поршень 138 может быть присоединен к коленчатому валу 140, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 140 может быть присоединен к по меньшей мере одному ведущему колесу пассажирского транспортного средства через систему трансмиссии. Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 140 через маховик, чтобы давать возможность операции запуска двигателя 10.
Цилиндр 30 может принимать всасываемый воздух через последовательность впускных воздушных каналов 142, 144 и 146. Впускной воздушный канал 146 может сообщаться с другими цилиндрами двигателя 10 в дополнение к цилиндру 30. В некоторых вариантах осуществления, один или более впускных каналов могут включать в себя устройство наддува, такое как турбонагнетатель или нагнетатель. Например, фиг. 2 показывает двигатель 10, сконфигурированный турбонагнетателем, включающим в себя компрессор 174, скомпонованный между впускными каналами 142 и 144, и турбину 176 в системе выпуска, скомпонованную вдоль выпускного канала 148. Компрессор 174 может по меньшей мере частично приводиться в действие турбиной 176 с приводом от отработавших газов через вал 180, где устройство наддува сконфигурировано в качестве турбонагнетателя. Однако, в других примерах, таких как где двигатель 10 снабжен нагнетателем, турбина 176 с приводом от отработавших газов, по выбору, может быть не включена в состав, где компрессор может приводиться в действие механической подводимой мощностью от электродвигателя или двигателя. Дроссель 20, включающий в себя дроссельную заслонку 64, может быть установлен вдоль впускного канала двигателя для изменения расхода и/или давления всасываемого воздуха, подаваемого в цилиндры двигателя. Например, дроссель 20 может быть расположен ниже по потоку от компрессора 174 или, в качестве альтернативы, может быть предусмотрен выше по потоку от компрессора 174.
Выпускной канал 148 может принимать отработавшие газы из других цилиндров двигателя 10 в дополнение к цилиндру 30. Датчик 128 отработавших газов показан присоединенным к выпускному каналу 148 выше по потоку от устройства 178 снижения токсичности выбросов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи указания топливо/воздушного соотношения в отработавших газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик количества кислорода в отработавших газах), двухрежимный кислородный датчик или датчик EGO (который изображен), HEGO (подогреваемый EGO), NOx, HC, или CO. Устройство 178 снижения токсичности выбросов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выбросов или их комбинациями.
Температура отработавших газов может оцениваться одним или более датчиков температуры (не показаны), расположенных в выпускном канале 148. В качестве альтернативы, температура отработавших газов может логически выводиться на основании условий эксплуатации двигателя, таких как число оборотов, нагрузка, отношение количества воздуха к количеству топлива (AFR), запаздывание искрового зажигания, и т.д. Кроме того, температура отработавших газов может вычисляться по одному или более датчиков 128 отработавших газов. Может быть принято во внимание, что температура отработавших газов, в качестве альтернативы, может оцениваться комбинацией способов оценки температуры, перечисленных в материалах настоящей заявки.
Каждый цилиндр двигателя 10 может включать в себя один или более впускных клапанов и один или более выпускных клапанов. Например, цилиндр 30 показан включающим в себя по меньшей мере один впускной тарельчатый клапан 150 и по меньшей мере один выпускной тарельчатый клапан 156, расположенные в верхней области цилиндра 30. В некоторых вариантах осуществления, каждый цилиндр двигателя 10, в том числе, цилиндр 30, может включать в себя по меньшей мере два впускных тарельчатых клапана и по меньшей мере два выпускных тарельчатых клапана, расположенных в верхней области цилиндра.
Впускной клапан 150 может управляться контроллером 12 посредством приведения в действие кулачков через систему 151 кулачкового привода. Подобным образом, выпускной клапан 156 может управляться контроллером 12 через систему 153 кулачкового привода. Каждая из систем 151 и 153 кулачкового привода может включать в себя один или более кулачков и может использовать одну или более из систем переключения профиля кулачков (CPS), регулируемой установки фаз кулачкового распределения (VCT), регулируемой установки фаз клапанного распределения (VVT) и/или регулируемого подъема клапана (VVL), которые могут управляться контроллером 12 для изменения работы клапанов. Положение впускного клапана 150 и выпускного клапана 156 может определяться датчиками 155 и 157 положения клапана, соответственно. В альтернативных вариантах осуществления, впускной и/или выпускной клапан могут управляться посредством клапанного распределителя с электромагнитным управлением. Например, цилиндр 30, в качестве альтернативы, может включать в себя впускной клапан, управляемый посредством приведения в действие клапанного распределителя с электромагнитным управлением, и выпускной клапан, управляемый через кулачковый привод, включающий в себя системы CPS и/или VCT. В кроме того еще других вариантах осуществления, впускной и выпускной клапаны могут управляться системой золотникового привода или распределителя либо системой привода или распределителя с переменной установкой фаз клапанного распределения.
Цилиндр 30 может иметь степень сжатия, которая является отношением объемов того, когда поршень 138 находится в нижней мертвой точке, к тому, когда в верхней мертвой точке. Традиционно, степень сжатия находится в диапазоне от 9:1 до 10:1. Однако, в некоторых примерах, где используется другое топливо, степень сжатия может быть увеличена. Это, например, может происходить, когда используется более высокооктановое топливо или топливо с более высоким скрытым теплосодержанием испарения. Степень сжатия также может быть повышена, если используется непосредственный впрыск, вследствие его воздействия на работу двигателя с детонацией.
В некоторых вариантах осуществления, каждый цилиндр двигателя 10 может включать в себя свечу 192 зажигания для инициирования сгорания. Система 190 зажигания может выдавать искру зажигания в камеру 30 сгорания через свечу 192 зажигания в ответ на сигнал SA опережения зажигания из контроллера 12, в выбранных рабочих режимах. Однако, в некоторых вариантах осуществления, свеча 192 зажигания может быть не включена в состав, таких как где двигатель 10 может инициировать сгорание самовоспламенением или впрыском топлива, как может иметь место у некоторых дизельных двигателей.
В некоторых вариантах осуществления, каждый цилиндр двигателя 10 может быть сконфигурирован одной или более форсунок для выдачи текучей среды подавления детонации или преждевременного воспламенения в него. В некоторых вариантах осуществления, текучая среда может быть топливом, при этом форсунка также указывается ссылкой как топливная форсунка. В качестве неограничивающего примера, показан цилиндр 30, включающий в себя одну топливную форсунку 166. Топливная форсунка 166 показана присоединенной непосредственно к цилиндру 30 для впрыска топлива непосредственно в него пропорционально ширине импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 168. Таким образом, топливная форсунка 166 обеспечивает то, что известно как непосредственный впрыск (в дальнейшем, также указываемый ссылкой как «DI») топлива в цилиндр 30 сгорания. Несмотря на то, что фиг. 2 показывает форсунку 166 в качестве боковой форсунки, она также может быть расположена выше поршня, к примеру, возле положения свечи 192 зажигания. Такое положение может улучшать смешивание и сгорание при работе двигателя на спиртосодержащем топливе вследствие низкой летучести некоторых спиртосодержащих видов топлива. В качестве альтернативы, форсунка может быть расположена выше и возле впускного клапана для улучшения смешивания.
Топливо может подаваться в топливную форсунку 166 из топливной системы 20 высокого давления, включающей в себя топливные баки, топливные насосы и направляющую-распределитель для топлива. В качестве альтернативы, топливо может подаваться однокаскадным топливным насосом на низком давлении, в каком случае, установка момента непосредственного впрыска топлива могут ограничиваться в большей степени во время такта сжатия, чем если используется топливная система высокого давления. Кроме того, несмотря на то, что не показано, топливные баки могут иметь преобразователь давления, выдающий сигнал в контроллер 12. Будет приниматься во внимание, что, в альтернативном варианте осуществления, форсунка 166 может быть форсункой оконного впрыска, выдающей топливо во впускное окно выше по потоку от цилиндра 30.
Как описано выше, фиг. 2 показывает только один цилиндр многоцилиндрового двигателя. По существу, каждый цилиндр, подобным образом, может включать в себя свой собственный набор впускных/выпускных клапанов, топливной форсунки(ок), свечи зажигания, и т.д.
Топливные баки в топливной системе 20 могут хранить топливо с разными качествами, такими как разные составы. Эти отличия могут включать в себя разное содержание спирта, разное октановое число, разную теплоту испарения, разные топливные смеси и/или их комбинации, и т.д. В одном из примеров, топливо с разными содержаниями спиртов могли бы включать в себя одно топливо, являющееся бензином, и другое, являющееся этиловым спиртом или метиловым спиртом. В еще одном примере, двигатель может использовать бензин в качестве первого вещества, и спиртосодержащую топливную смесь, такую как E85 (которая является приблизительно 85% этилового спирта и 15% бензина) или M85 (которая является приблизительно 85% метилового спирта и 15% бензина) в качестве второго вещества. Другие спиртосодержащие виды топлива могли бы быть смесью спирта и воды, смесью спирта, воды и бензина, и т.д.
Контроллер 12 показан на фиг. 2 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 106, порты 108 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 110 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 112, энергонезависимую оперативную память 114 и шину данных. Как обсуждено по фиг. 1, система управления транспортного средства, которая включает в себя контроллер 12, может быть присоединена с возможностью обмена информацией к внебортовой сети 13, такой как облачная вычислительная система. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 122 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ECT) с датчика 116 температуры, присоединенного к патрубку 118 охлаждения; сигнал профильного считывания зажигания (PIP) с датчика 120 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 140; положение дросселя (TP) с датчика положения дросселя; сигнал абсолютного давления в коллекторе (MAP) с датчика 124, AFR цилиндра с датчика 128 EGO, и аномальное сгорание с датчика детонации. Сигнал числа оборотов двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе. Контроллер также может принимать входной сигнал водителя и указание касательно состояния зажигания двигателя из водительского интерфейса 15 для зажигания.
Постоянное запоминающее устройство 110 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые процессором 106 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены. Примерные процедуры описаны в материалах настоящей заявки со ссылкой на фиг. 3-5.
С обращением к фиг. 3, она показывает примерную процедуру 300, которая иллюстрирует способ для адаптивной калибровки силовой передачи транспортного средства. Несмотря на то, что фиг. 3 показывает примерный способ для обновления одной из калибровочных таблиц, способ может применяться для обновления одной или более калибровочных таблиц, каждая относится к разным аспектам работы транспортного средства.
Кроме того, будет принято во внимание, что процедуры по фиг. 3-4 изображают основанное на облаке обновление калибровочной таблицы транспортного средства после того, как транспортное средство находится во владении и использовании потребителем. По существу, это может составлять вторую фазу облачной калибровки. Транспортное средство могло испытывать подобное основанное на облаке формирование и обновление калибровочной таблицы во время разработки транспортного средства в местоположении производителя. По существу, это может составлять первую фазу облачной калибровки. Первая фаза калибровки может выполняться, чтобы добиваться быстрой калибровки, так чтобы транспортное средство могло успешно проходить все требования к выбросам, перед тем, как транспортное средство продано потребителю. Во время первой фазы, формирование калибровочной таблицы для отдельного транспортного средства может быть ускорено с использованием калибровочных данных, собранных на борту парка находящихся в использовании транспортных средств одинаковой марки и модели. На ней, как и во второй фазе (конкретизированной на фиг. 3-4), калибровочные данные, собранные на борту каждого транспортного средства из парка, могут выгружаться во внебортовую сеть, такую как облачная вычислительная система. Контроллер транспортного средства, испытывающего обновления калибровки, может загружать значимые данные из внебортовой сети и быстро заполнять (или формировать) исходную калибровочную таблицу транспортного средства. Исходная калибровочная таблица затем может дополнительно оптимизирована по мере того, как водитель использует транспортное средство. Во время этой второй фазы калибровки, исходная калибровочная таблица может обновляться не только на основании использования транспортного средства водителем (то есть, собранных на борту данных), но также на основании данных, собранных на борту одного или более других транспортных средств, с возможностью обмена информации присоединенных к внебортовой сети.
На 302, может определяться, запланирована ли калибровочная таблица для обновления. Калибровочная таблица может периодически обновляться во время эксплуатации транспортного средства потребителем. В одном из примеров, калибровочная таблица может обновляться по инициированию ездового цикла транспортного средства. В еще одном примере, калибровочная таблица может обновляться по завершению ездового цикла транспортного средства. В еще одном другом примере, калибровочная таблица может периодически обновляться по истечению пороговой длительности или расстояния эксплуатации транспортного средства после последнего обновления калибровки. В кроме того других примерах, калибровочная таблица может обновляться по истечению предопределенного количества циклов сгорания после запуска двигателя. В них, прохождение циклов сгорания может подсчитываться в контроллере транспортного средства, и, когда истекло предопределенное количество циклов сгорания, данные, накопленные за предопределенное количество циклов сгорания, могут использоваться для обновления калибровочной таблицы. В дополнение, данные, накопленные за количество циклов сгорания, могут выгружаться во внебортовую сеть в реальном времени, как обсуждено ниже. В кроме того еще одном примере, калибровочная таблица может обновляться на основании входного сигнала из бортового навигационного устройства. По существу, обновление калибровочной таблицы может выполняться автоматически, то есть, без входного сигнала от потребителя. Кроме того, обновление калибровочной таблицы может выполняться на основании наличия в распоряжении и возможности соединения с сетью. Будет принято во внимание, что одна или более дополнительных калибровочных таблиц, каждая относится к разным аспектам работы транспортного средства, могут обновляться подобным образом.
По определению, что калибровочная таблица подлежит запланированному обновлению, на 304, калибровочная таблица может обновляться на основании данных, собранных и сохраненных на борту транспортного средства во время эксплуатации транспортного средства, и внебортовых сетевых данных. Бортовые данные могут включать в себя данные, собранные во время эксплуатации транспортного средства и сохраненные локально в памяти контроллера транспортного средства, к примеру, в энергонезависимой оперативной памяти. Посредство сохранения данных локально, они могут подвергаться доступу быстро и использоваться для ускорения обновления калибровочной таблицы силовой передачи транспортного средства. В качестве используемых в материалах настоящей заявки, внебортовые сетевые данные могут соответствовать данным, загруженным из внебортовой сети. Внебортовая сеть может быть облачной вычислительной системой (в материалах настоящей заявки также указываемой ссылкой как облако данных), присоединенной с возможностью обмена информацией к системе управления транспортного средства. Данные, загруженные из облачной вычислительной системы, могли быть собраны на борту одного или более других транспортных средств, с возможностью обмена информацией присоединенных к облаку данных. Подробности об обновлении калибровочной таблицы будут дополнительно конкретизированы на фиг. 4. Как конкретизировано на ней, данные, собранные на борту множества подобных транспортных средств, предоставляют возможность для более быстрой адаптации калибровочной таблицы вследствие всех различных ездовых циклов, в которых эксплуатируется парк транспортных средств.
Как только обновление калибровочной таблицы завершено, на 306, выходной параметр силовой передачи транспортного средства может оптимизироваться на основании обновленной калибровочной таблицы. По существу, выходной параметр силовой передачи транспортного средства может включать в себя одно или более из выходного параметра двигателя, выходного параметра исполнительного механизма двигателя, выходного параметра трансмиссии, выходного параметра исполнительного механизма трансмиссии, а также состояния заряда аккумуляторной батареи, регуляторов электродвигателя и одной или более машин, скомплектованных, чтобы накапливать и высвобождать энергию в контексте транспортного средства с гибридным приводом. Оптимизация выходного параметра силовой передачи транспортного средства будет дополнительно конкретизирована на фиг. 5. Кроме того, на 308, данные, собранные на борту транспортного средства во время данного ездового цикла транспортного средства, могут выгружаться во внебортовую сеть. В одном из примеров, данные из обновленной калибровочной таблицы могут выгружаться во внебортовую сеть. Данные могут выгружаться автоматически, без водительского входного сигнала (например, не требуя напоминания от водителя транспортного средства). Например, данные могут автоматически выгружаться вслед за каждым ездовым циклом транспортного средства. В качестве альтернативы, данные могут выгружаться в реальном времени в облако данных периодически, к примеру, через пороговое расстояние проезда транспортного средства, через пороговую длительность поездки транспортного средства, через пороговое количество циклов сгорания двигателя, и т.д.
Будет принято во внимание, что, несмотря на то, что фиг. 3 показывает данные, сформированные на борту данного транспортного средства, передаваемые в и выгружаемые во внебортовую сеть (например, облако данных), данные, сформированные на борту одного или более других транспортных средств (таких как каждое транспортное средство парка транспортных средств на дороге), могут подобным образом передаваться и выгружаться во внебортовую сеть. Данные затем могут храниться в сети и совместно использоваться между всеми транспортными средствами, поддерживающими связь с сетью. То есть, каждое транспортное средство может иметь доступ к данным, собранным на борту всех других транспортных средств из парка через сеть.
С обращением к фиг. 4, она показывает примерную процедуру 400, которая иллюстрирует способ для адаптивного обучения калибровочной таблицы на основании данных, собранных на борту транспортного средства во время эксплуатации транспортного средства, и данных, загруженных из системы внебортовой сети, такой как облачная вычислительная система. Калибровочная таблица может включать в себя множество ячеек, и каждая ячейка может соответствовать по меньшей мере двум условиям эксплуатации. Условия эксплуатации могут включать в себя по меньшей мере два из числа оборотов двигателя, нагрузки двигателя, температуры двигателя, барометрического давления, содержания спирта в топливе, влажности окружающей среды, температуры окружающей среды и состояния заряда аккумуляторной батареи гибридного привода. Кроме того другие условия эксплуатации могут включать в себя октановое число топлива, заправочную станцию, время, проведенное в режиме работы двигателя или режиме работы транспортного средства, время, проведенное с заглушенным двигателем или выключенным транспортным средством, температуру окружающей среды, буксировку, пробег в милях, возраст транспортного средства, история технического обслуживания, и т.д.
Выходные данные каждой ячейки могут соответствовать настройке или адаптации исполнительного механизма, которые используются для оптимизации выходного параметра силовой передачи транспортного средства в заданных условиях эксплуатации. В качестве примера, ячейка может соответствовать условиям числа оборотов двигателя и нагрузки двигателя, а выходные данные ячейки могут включать в себя адаптацию для установки фаз клапанного распределения цилиндра, установки фаз кулачкового распределения, установки момента зажигания, интенсивности EGR, величины впрыска топлива и/или установки момента впрыска топлива.
На 402, контроллер может определять время пребывания транспортного средства в условиях эксплуатации в каждой ячейке калибровочной таблицы. Время пребывания транспортного средства в ячейке может быть основано на длительности эксплуатации транспортного средства в соответствующих условиях эксплуатации за данное количество циклов двигателя, ездовых циклов, и т.д. Поскольку условия эксплуатации могут меняться в течение различных ездовых циклов, время пребывания транспортного средства в условиях эксплуатации для каждой ячейки также может меняться. Изменение дополнительно может основано на манере вождения водителя транспортного средства, маршруте работы транспортного средства, географическом местоположении работы транспортного средства, климатических условиях, и т.д. По мере того, как длительность эксплуатации транспортного средства в специфичных условиях эксплуатации возрастает, время пребывания для такой ячейки может возрастать. Например, транспортное средство, работающее в течение больших длительностей времени на автомагистрали, может иметь большие времена пребывания в условиях высоких числа оборотов и нагрузки по сравнению с транспортным средством, работающим в условиях езды по городу. С другой стороны, транспортное средство с большим вождением по городу может иметь большие времена пребывания в условиях низкого числа оборотов и нагрузки по сравнению с транспортным средством, ездящим по автомагистрали.
В альтернативных примерах, вместо определения времени пребывания, может определяться уровень доверия, ассоциативно связанный с временем пребывания, точки данных. Поскольку достоверность данных, собранных на борту данного транспортного средства в данной рабочей зоне, основана на времени пребывания транспортного средства в такой рабочей зоне, могут быть зоны калибровочной таблицы транспортного средства, где собранные на борту данные имеют низкую достоверность. Это понижает способность контроллера надежно оптимизировать выходной параметр силовой передачи транспортного средства. В дополнение, если нет достаточного количества отсчетов выборки бортовых данных, собранных и усредненных на множестве точек числа оборотов-нагрузки двигателя, калибровочная таблица транспортного средства не может заполняться с достаточной достоверностью. С другой стороны, могут быть области управления исполнительными механизмами, которые могут использовать данные с низкими уровнями доверия и низкими временами пребывания, если ошибка от оценки оказывает небольшое влияние на управление. Изобретатели осознали, что, посредством использования глобальных данных, собранных на борту одного или более других транспортных средств, данные, собранные за многочисленные ездовые циклы согласующихся транспортных средств, могут преимущественно использоваться для заполнения калибровочной таблицы данного транспортного средства, улучшая значение достоверности данных, используемых для оптимизации выходного параметра силовой передачи транспортного средства. В дополнение, может быть достаточное количество отсчетов выборки данных с высокой достоверностью.
По определению времени пребывания для каждой ячейки в калибровочной таблицы, на 404 контролер может определять, является ли время пребывания в условиях эксплуатации для данной ячейки большим, чем пороговое значение времени пребывания. Будет принято во внимание, что, в некоторых примерах, время пребывания может изучаться в качестве количества циклов сгорания, истекших при данном условии эксплуатации, вместо абсолютной длительности работы при данном условии эксплуатации. Например, на высоких числах оборотов двигателя, большее количество циклов сгорания происходит за более короткое время, делая количество циклов сгорания более важным аспектом. Таким образом, в одном из примеров, может определяться, провело ли транспортное средство больше, чем 300 циклов сгорания в условиях эксплуатации для данной ячейки, чтобы статистически определять, что был получен доверительный интервал. В одном из примеров, на основании доверительного интервала, возможного отклонения от доверительного интервала и ожидаемого воздействия отклонения на управление конкретным исполнительным механизмом, контроллер может определять ожидаемую точность управления. На основании ожидаемой точности, являющейся достаточно высокой, контроллер может решать использовать сетевые данные.
Если определено, что время пребывания в условиях эксплуатации для данной ячейки больше, чем пороговое значение, на 406, контроллер может заполнять данную ячейку данными, собранными на борту транспортного средства. Например, контроллер может настраивать выходные данные данной ячейки только данными, собранными на борту транспортного средства. Например, в тех случаях, когда выходные данные данной ячейки являются адаптивным членом коэффициента передачи, контроллер может настраивать значение адаптивного члена коэффициента передачи на основании данных, собранных на борту транспортного средства. Если время пребывания не больше, чем пороговое значение, процедура может переходить на 408.
В альтернативных примерах, контроллер может определять объем выборки данной ячейки. Например, может определяться количество отсчетов выборки данных или точек данных, имеющихся в распоряжении для данной ячейки. Если количество отсчетов выборки больше, чем пороговый объем выборки, контроллер может настраивать значение адаптивного члена коэффициента передачи на основании данных, собранных на борту транспортного средства. Иначе, процедура может переходить на 408.
На 408, контроллер транспортного средства может поддерживать связь с внебортовой сетью, такой как облачная вычислительная система, и загружать калибровочные данные для данной ячейки из одного или более транспортных средств, имеющих время пребывания, большее, чем пороговое значение, в условиях эксплуатации для данной ячейки. По существу, данные могут загружаться из одного или более (других) транспортных средств, имеющих конфигурации силовой передачи, согласующиеся с таковой у данного транспортного средства. Например, могут быть данные, сформированные на борту одного или более других транспортных средств с согласующейся конфигурацией силовой передачи, которые передаются в и сохраняются во внебортовой сети. Контроллер может идентифицировать одно или более других транспортных средств с согласующимися конфигурациями силовой передачи, а кроме того, идентифицировать, имеет ли какое-нибудь из таких транспортных средств соответствующую ячейку(и) своей калибровочной таблицы, заполненную данными, собранными во время эксплуатации с временем пребывания, большим, чем пороговое значение, в соответствующей рабочей области. Контроллер также может отмечать время пребывания для каждого из таких транспортных средств в условиях эксплуатации, соответствующих данной ячейке. Будет принято во внимание, что, в альтернативных вариантах осуществления, обработка данных и расчеты могут выполняться во внебортовой сети вместо того, чтобы на уровне контроллера транспортного средства. В этом отношении, большая вычислительная мощность внебортовой сети и облачной вычислительной системы предоставляла бы возможность для более быстрого накопления калибровочных таблиц для транспортных средств с подобными условиями эксплуатации. В дополнение, могут уменьшаться проблемы, ассоциативно связанные с одноранговой связью, такие как калибровка для одного из транспортных средств, уходящая в неверном направлении вследствие механического износа или ухудшения характеристик.
Например, внебортовая сеть может отслеживать все погодные условия (такие как влажность) и, на основании того, как отслеживаемый погодный параметр воздействует на работу силовой передачи транспортного средства, контроллер транспортного средства может уклоняться от такого воздействия, применять текущую погоду на день и настраивать данные для загрузки обратно на транспортное средство. В качестве еще одного примера, внебортовая сеть может отслеживать локальные условия движения. Контроллер транспортного средства затем может адаптировать работу транспортного средства под локальные условия движения. Например, контроллер может адаптировать кривую реакции педали на основании условий интенсивного движения транспорта.
Затем, на 410, калибровочные данные для данной ячейки могут загружаться из внебортовой сети. В частности, данные для данной ячейки, собранные на борту одного или более других транспортных средств, имеющих большее, чем пороговое, время пребывания в условиях эксплуатации для данной ячейки, загружаются из облачной вычислительной системы.
В альтернативных примерах, уровень доверия или время пребывания каждой ячейки может сравниваться с пороговым значением уровня доверия. Если пороговое значение уровня доверия превышено, собранные на борту данные могут считаться достоверными. В дополнение, как обсуждено выше, для некоторых областей калибровочной таблицы или некоторых областей управления исполнительным механизмом, данные, имеющие время пребывания или уровни доверия, более низкие, чем пороговое значение уровня доверия, также могут использоваться, если ошибка от данных, собранных в такой ячейке, обладает от небольшого до никакого воздействием на управление данным исполнительным механизмом.
Затем, на 412, калибровочная таблица данного транспортного средства может настраиваться на основании загруженных данных. В одном из примеров, среднее значение загруженных данных, собранных на борту одного или более идентифицированных транспортных средств, может использоваться для настройки калибровочной таблицы. В еще одном примере, вес может назначаться внебортовым калибровочным данным на основании времени пребывания каждого идентифицированного транспортного средства в условиях эксплуатации для данной ячейки. Взвешенные данные из всех идентифицированных транспортных средств могут обрабатываться для определения значений для данной ячейки в калибровочной таблице. Назначенный вес может быть основан на абсолютном времени пребывания каждого транспортного средства в условиях эксплуатации для данной ячейки. В качестве альтернативы, назначенный вес может быть основан на времени пребывания относительно порогового значения или времени пребывания каждого идентифицированного транспортного средства относительно времени пребывания данного транспортного средства (имеющего меньшее, чем пороговое, время пребывания). Например, по мере того, как время пребывания для транспортного средства, идентифицированного из парка транспортных средств во внебортовой сети, превышает время пребывания транспортного средства, подвергающегося обновлениям калибровки, весомость данных, собранных на борту идентифицированного транспортного средства, может повышаться. По существу, внебортовая сеть может отслеживать отдельные транспортные средства, а также качество данных, принятых с каждого транспортного средства. Кроме того, история изменений калибровки также может контролироваться, и аномальные значения могут идентифицироваться для калибровок, которые требуют возвращаться к значениям за пределами идентифицированного сетью порогового значения. Аномальные значения могут не использоваться для обновления калибровочных таблиц. В дополнение к времени пребывания, весовой коэффициент также может быть основан на количестве отсчетов выборки данных, имеющихся в распоряжении. На основании времени пребывания и количества имеющихся в распоряжении отсчетов выборки данных, значение достоверности может рассчитываться, и весовой коэффициент может настраиваться на основании значения достоверности. Таким образом, отсчеты выборки данных, загруженные из внебортовой сети, имеющие более высокое значение достоверности, могут снабжаться большим весом наряду с тем, что имеющие более низкое значение достоверности, могут снабжаться меньшим весом.
Как конкретизировано ниже, весовой коэффициент дополнительно может быть основан на одном или более других условий транспортного средства, таких как местоположение транспортного средства. Например, весовой коэффициент для отсчетов выборки данных, собранных на борту одного или более транспортных средств, расположенных ближе к (например, в пределах порогового расстояния от) данному транспортному средству, подвергающемуся обновлению калибровочной таблицы, может быть более высоким наряду с тем, что весовой коэффициент отсчетов выборки данных, собранных на транспортном средстве, расположенном дальше (например, на большем, чем пороговое, расстоянии от данного транспортного средства) может быть более низким. Как обсуждено выше, обработка данных и расчеты могут выполняться во внебортовой сети вместо того, чтобы на уровне контроллера транспортного средства. В одном из примеров, выполнение расчетов в облачной вычислительной системе может уменьшать риск вынуждения ошибочного транспортного средства оказывать влияние на его соседей плохими данными. Например, калибровки могут быть нормализованы касательно локальных климатических условий. Погода, высота над уровнем моря, влажность, и т.д., могут отслеживаться в облаке, воздействия связанных с погодой параметров на рабочие характеристики транспортного средства устраняться, а локальные воздействия применяться и загружаться. Таким образом, облачная вычислительная система по существу может определять, какие точки данных, собранные на борту парка транспортных средств, являются надежными для загрузки и для обновления калибровочной таблицы.
В последствии, выходные данные данной ячейки (которая имеет бортовые данные с временем пребывания, меньшим, чем пороговое значение), могут настраиваться загруженными внебортовыми сетевыми данными. Например, ячейка может заполняться данными на основании данных, собранных на борту одного или более других транспортных средств, имеющих времена пребывания, большие, чем пороговое значение, для данной ячейки. В альтернативном примере, выходные данные данной ячейки могут настраиваться на основании комбинации данных, изученных на борту транспортного средства, и загруженных внебортовых сетевых данных. Например, вес может назначаться бортовым и внебортовым сетевым данным на основании времени пребывания соответственных транспортных средств в условиях эксплуатации данной ячейки. Взвешенные бортовые данные транспортного средства и внебортовые сетевые данные могут обрабатываться для определения выходных данных (например, адаптивного члена) для данной ячейки). Здесь, сформированным на борту данным может назначаться более низкий вес наряду с тем, что внебортовым сетевым данным может назначаться более высокий вес, более низкий вес понижается по мере того, как убывает время пребывания данного транспортного средства, более высокий вес повышается по мере того, как возрастает время пребывания соответствующего транспортного средства. Таким образом, вклад данных каждого транспортного средства в обновление калибровочной таблицы может масштабироваться на основании времени пребывания транспортного средства в специфичных условиях эксплуатации. Таким образом, значения в каждой ячейке калибровочной таблицы могут обновляться на основании адаптивного обучения с использованием бортовых данных транспортного средства, внебортовых сетевых данных или тех и других. При времени пребывания транспортного средства, являющемся меньшим, чем пороговое значение, для данной ячейки, обновленное значение может настраиваться данными, полученными из внебортовой сети, или комбинацией бортовых данных транспортного средства и внебортовых сетевых данных. При времени пребывания транспортного средства, являющемся большим, чем пороговое значение, для данной ячейки, обновленное значение может получаться на основании исключительно бортовых данных транспортного средства. По существу, калибровочные таблицы могут быть нормализованы для локальных климатических условий. Например, климатические условия, такие как погода, высота над уровнем моря, влажность, и т.д., могут отслеживаться для каждого транспортного средства. Воздействие этих изменений загружаемых данных может аннулироваться, и могут применяться локальные климатические условия для данного транспортного средства. Этапы 402-412 могут повторяться для каждой ячейки калибровочной таблицы транспортного средства до тех пор, пока не была обновлена в достаточной мере вся таблица. После обновления каждой ячейки калибровочной таблицы, процедура может возвращаться на 306 на фиг. 3. Процедура по фиг. 3 может повторяться подобным образом для многочисленных калибровочных таблиц, каждая управляет разными аспектами эксплуатации транспортного средства.
В качестве примера, данные, собранные на борту транспортного средства, эксплуатируемого коммивояжером, покрывающим многие мили и частые поездки по автомагистрали, могут использоваться, чтобы «доводить до зрелого состояния» калибровочную таблицу другого транспортного средства, эксплуатируемого «приобретающим бакалейные товары» в коротких поездках по городу. Таким образом, глобальные данные могут использоваться для заполнения большинства условий эксплуатации и соответствующих ячеек. Кроме того, локальные адаптации могли бы выполняться, чтобы точно настраивать специфичное транспортное средство и делать его более устойчивым к изменчивости от транспортного средства к транспортному средству. Например, контроллер может поддерживать связь с внебортовой сетью, для того чтобы идентифицировать набор транспортных средств в парке, имеющих более длительное время пребывания в выбранных условиях эксплуатации. Контроллер, в таком случае, может выбирать подмножество транспортных средств из множества на основании географического расположения транспортных средств относительно местоположения данного транспортного средства (где обновляется калибровочная таблица). Контроллер затем может обновлять калибровочную таблицу только на основании данных, собранных на борту подмножества транспортных средств. В качестве альтернативы, контроллер может обновлять калибровочную таблицу с использованием данных, собранных на борту всех идентифицированных транспортных средств, но при взвешивании данных, данных, собранных на борту подмножества транспортных средств при условии более высокой весомости. В альтернативных примерах, выбор может выполняться внебортовой сетью вместо того, чтобы на уровне контроллера. По существу, облачная вычислительная система может иметь наибольший набор данных и более высокую вычислительную мощность. Облачная вычислительная система может фильтровать качество отдельных входных данных и определять, какой набор данных наиболее уместен и достоверен для конкретного транспортного средства, наряду с установлением взвешивания для каждого набора данных. После того, как набор данных выбран для загрузки облачной вычислительной системой, контроллер транспортного средства может загружать выбранные данные и обновлять калибровочную таблицу данного транспортного средства.
В кроме того дополнительных примерах, облако данных транспортного средства может хранить данные, относящиеся к многим дополнительным аспектам рабочих характеристик и адаптации транспортного средства. В качестве примера, могут сохраняться и совместно использоваться данные, относящиеся к дозаправке топливом. В этом отношении, контроллер может передавать данные касательно условий эксплуатации транспортного средства во время дозаправки топливом, местоположения дозаправки топливом, конкретной заправочной станции, где происходила дозаправка топливом, а также подробностей о топливе, дозаправленном в топливный бак (например, содержания спирта в топливе, октанового числа топлива, и т.д.), во внебортовую сеть. Хранимые данные затем могут извлекаться другими транспортными средствами из парка при дозаправке топливом на той же самой заправочной станции, чтобы настраивать работу транспортного средства. Например, регулировки исполнительных механизмов силовой передачи для другого транспортного средства, дозаправляющегося на той же самой заправочной станции, могут адаптироваться на основании хранимых данных, чтобы лучше справляться с переходными процессами (например, переходными процессами по крутящему моменту), проистекающими от различий между топливом, имеющимся в распоряжении на станции, и текущим топливом в топливном баке транспортного средства.
Будет принято во внимание, что, несмотря на то, что, в некоторых примерах, калибровочная таблица обновляется до того, как инициирована оптимизация транспортного средства, в альтернативных примерах, транспортное средство может запускаться на калибровочной таблице, которая является достаточно зрелой, чтобы предоставлять возможность базового вождения и оптимизации. Таблица затем может быстро обновляться данными, загруженными из облака данных. По существу, это уменьшает усилия по калибровке контроллера транспортного средства. Например, транспортное средство может запускаться и изначально эксплуатироваться с базовой калибровочной таблицей, основанной только на собранных на борту данных за некоторое количество циклов двигателя, а затем, калибровочная таблица может обновляться данными, загруженными из внебортовой сети. В дополнение, во время формирования исходной калибровочной таблицы, во время первой фазы калибровки, базовая калибровочная таблица может заполняться данными, собранными на борту транспортного средства во время испытаний транспортного средства, данные собираются за некоторое количество циклов двигателя, а кроме того, заполняться данными, загруженными из внебортовой сети, загруженные данные собраны на борту некоторого количества транспортных средств идентичных или подобных марки и модели, совершенствуемых производителем (например, собственных транспортных средств одной и той же марки и модели в парке производителя, объезжаемых инженерами во время фазы совершенствования транспортного средства). В одном из примеров, транспортное средство может адаптировать калибровочную таблицу в пределах 2 циклов по выбросам, значимых для вождения, так чтобы транспортное средство могло выполнять третий ездовой цикл по выбросам и успешно проходить нормы выбросов. Это предоставляет транспортному средству возможность быстро делать выбросы совместимыми во время фазы совершенствования у производителя, и до того, как транспортное средство продано потребителю.
Дополнительно будет принято во внимание, что, несмотря на то, что процедура по фиг. 4 изображает обновление ячеек калибровочной таблицы транспортного средства внебортовыми сетевыми данными, когда транспортное средство имеет малое время пребывания в таких ячейках, в кроме того дополнительных примерах, ячейки, где транспортное средство имеет достаточное время пребывания, также могут обновляться на основании внебортовых сетевых данных. Например, контроллер транспортного средства может сравнивать время пребывания и ассоциативно связанное значение достоверности для данных, собранных на борту транспортного средства, для данной ячейки с временем пребывания и ассоциативно связанным значением достоверности для данных, собранных на борту одного или более других транспортных средств, для данной ячейки. Одно или более транспортных средств могут быть транспортными средствами, имеющими согласующиеся характеристики, а кроме того, находящиеся в аналогичном местоположении (например, в пределах порогового расстояния от), как данное транспортное средство. Если есть множество транспортных средств и отсчетов выборок данных, имеющихся в распоряжении для данной ячейки, контроллер транспортного средства может рассчитывать, насколько далеко бортовые данные находятся от среднего отсчета выборки данных множества транспортных средств, чтобы различать, эксплуатируется ли данное транспортное средство далеко от средних данных. Если так, контроллер транспортного средства может задействовать специальные диагностические процедуры.
В одном из примерных представлений, контроллер транспортного средства может инициировать одну или более диагностик компонентов силовой передачи транспортного средства на основании сравнения точек данных ячейки калибровочной таблицы силовой передачи транспортного средства, собранных на борту транспортного средства с точками данных для ячейки, загруженных из внебортовой сети, загруженные данные собираются на борту одного или более других транспортных средств, поддерживающих связь с сетью. Одно или более других транспортных средств могут иметь согласующиеся характеристики силовой передачи и могут быть расположены в пределах порогового расстояния от данного транспортного средства. Контроллер может сравнивать точку данных ячейки, собранную на борту транспортного средства, со статистически значимым средним значением (например, среднюю величину, моду, медиану, взвешенное среднее значение, и т.д.) загруженных данных. В ответ на разность между точкой данных ячейки и статистически значимым средним значением, являющуюся большей, чем пороговое значение, может инициироваться диагностическая процедура.
В еще одном примерном представлении, контроллер транспортного средства может настраивать точки данных калибровочной таблицы силовой передачи транспортного средства с использованием данных, собранных на борту транспортного средства, и с использованием выбранного набора данных, загруженного из внебортовой сети, загруженные данные собираются на борту одного или более других транспортных средств, поддерживающих связь с сетью. Выбранные набор данных может выбираться модулем управления внебортовой сети на основании различных факторов.
В кроме того еще одном примерном представлении, во время первой фазы калибровки, точки данных калибровочной таблицы силовой передачи транспортного средства могут настраиваться с использованием данных, собранных на борту транспортного средства во время испытаний транспортного средства, а кроме того, настраиваться с использованием данных, загруженных из внебортовой сети, загруженных данные собраны на борту одного или более других (например, парка) транспортных средств, поддерживающих связь с сетью, одно или более транспортных средств имеют согласующиеся конфигурации силовой передачи, загруженные данные собираются, в то время как одно или более транспортных средств совершенствуются производителем. Первая фаза калибровки может выполняться, в то время как транспортное средство находится в расположении производителя и до того, как транспортное средство находится в использовании потребителем. Первая, исходная (или базовая) калибровочная таблица может формироваться в конце первой фазы калибровки. В дополнение, точки данных первой калибровочной таблицы могут настраиваться, так чтобы транспортное средство было совместимым по выбросам. Затем, во время второй фазы калибровки, точки данных калибровочной таблицы силовой передачи транспортного средства могут настраиваться с использованием данных на борту транспортного средства во время использования транспортного средства потребителем, а кроме того, настраиваться с использованием данных, загруженных из внебортовой сети, загруженных данные собраны на борту одного или более других (например, парка) транспортных средств, поддерживающих связь с сетью, одно или более транспортных средств имеют согласующиеся конфигурации силовой передачи, загруженные данные собираются, в то время как одно или более транспортных средств используются соответственными потребителями. Вторая фаза калибровки может выполняться после того, как транспортное средство покинуло местоположение производителя, и в то время как транспортное средство находится в использовании потребителем. Вторая, обновленная калибровочная таблица может формироваться в конце второй фазы калибровки. В дополнение, точки данных второй калибровочной таблицы могут настраиваться, так чтобы транспортное средство было оптимизировано для использования водителем. Во время как первой, так и второй фаз калибровки, данные для загрузки и использования при настройке калибровочной таблицы могут выбираться во внебортовой сети. Выбор может быть основан на различных факторах, таких как качество отдельных входных сигналов, местоположение сбора данных, внешние погодные условия во время сбора данных, история сбора данных на каждом транспортном средстве из парка, и т.д. Внебортовая сеть может устанавливать весовой коэффициент для каждого набора данных, собранного на борту транспортного средства из парка. Внебортовая сеть затем может выбирать один или более наборов данных для загрузки в калибровочную таблицу конкретного транспортного средства, выбор выполняется на основании того, что является наиболее уместным и надежным для конкретного транспортного средства. Таким образом, контроллер транспортного средства может использовать калибровочную информацию из внебортовой сети для улучшения или доведения до состояния зрелости калибровочной таблицы данного транспортного средства в условиях эксплуатации, в которых транспортное средство имеет недостаточные бортовые данные. Посредством использования данных, загруженных из внебортовой сети, собранных на борту одного или более транспортных средств на связи с внебортовой сетью, калибровочная таблица может обновляться быстрее и достовернее. Вообще, транспортное средство может быстрее адаптироваться к изменениям глобальных и региональных условий эксплуатации.
Фиг. 5 показывает примерную процедуру 500, которая иллюстрирует способ для настройки параметра силовой передачи транспортного средства, такого как регулировка исполнительного механизма, для оптимизации выходного параметра силовой передачи транспортного средства на основании адаптивного обучения калибровочной таблицы транспортного средства.
На 502, контроллер может оценивать и/или рассчитывать условия эксплуатации двигателя. Таковые, например, могут включать в себя, число оборотов двигателя, температуру двигателя, требование крутящего момента водителя, требование наддува, условия окружающей среды, температуру отработавших газов, и т.д. Затем, на 504, контроллер может определять регулировки исполнительных механизмов для оптимального выходного параметра силовой передачи транспортного средства в оцененных условиях эксплуатации на основании обновленной калибровочной таблицы. Например, контроллер может определять выходные данные одной или более ячеек обновленной калибровочной таблицы, соответствующих оцененным условиям эксплуатации. По существу, выходные данные ячеек могут включать в себя выходной параметр силовой передачи транспортного средства. Выходной параметр силовой передачи транспортного средства может включать в себя одни или более из выходного параметра двигателя, выходного параметра трансмиссии, выходного параметра электродвигателя гибридного привода и выходного параметра других машин, используемых для накопления и высвобождения энергии. Например, выходной параметр двигателя может включать в себя одно или более из запланированных числа оборотов двигателя и нагрузки двигателя, наряду с тем, что выходной параметр трансмиссии может включать в себя одно или более из запланированного выбора передачи, плана переключения трансмиссии, регулирования давления в трансмиссии и управления гидротрансформатором. Выходной параметр электродвигателя гибридного привода может включать в себя командный выходной крутящий момент электродвигателя. Выходные данные ячеек в качестве считываемых контроллером могут включать в себя абсолютные регулировки исполнительных механизмов или члены адаптации, такие как адаптивный член коэффициента передачи регулировки исполнительного механизма.
Затем, на 506, контроллер может настраивать один или более из исполнительных механизмов силовой передачи транспортного средства на основании определенных регулировок. Это включает в себя настройку одного или более выходного параметра исполнительного механизма двигателя, выходного параметра исполнительного механизма трансмиссии и выходного параметра электродвигателя гибридной передачи для оптимизации выходного параметра силовой передачи транспортного средства. Настраиваемые регулировки выходного параметра исполнительного механизма двигателя могут включать в себя одно или более из установки фаз клапанного распределения, установки фаз кулачкового распределения, установки момента впрыска, величины впрыска, опережения зажигания, интенсивности EGR и давления наддува. Подобным образом, настраиваемые регулировки выходного параметра исполнительного механизма трансмиссии могут включать в себя одно или более из выбора передачи трансмиссии, давления на муфте трансмиссии, давления на муфте гидротрансформатора, давления электрического масляного насоса, давления в магистралях и времен реакции соленоида, давления в магистралях трансмиссии, характеристик соленоида переключения, интенсивностей блокировки или проскальзывания гидротрансформатора, и т.д. Выходной параметр электродвигателя гибридного привода может включать в себя команду крутящего момента контроллера электродвигателя.
Таким образом, глобальные калибровочные данные, собранные на одном или более транспортных средств (например, из парка транспортных средств, имеющих согласующиеся конфигурации) во время использования транспортного средства соответственными потребителями, могут использоваться для оптимизации выходного параметра силовой передачи транспортного средства у данного транспортного средства, находящегося в использовании его соответственным потребителем. Посредством выгрузки данных, собранных на борту каждого транспортного средства, во внебортовую сеть, общие данные могут совместно использоваться между каждым транспортным средством из парка на связи с внебортовой сетью. Это предоставляет калибровочной таблице каждого транспортного средства возможность доводиться до состояния зрелости данными, собранными на борту данного транспортного средства, а также данными, собранными во время эксплуатации других транспортных средств. В дополнение к накоплению калибровочных данных и соответствующих времен пребывания, внебортовая сеть может хранить дополнительные данные рабочих характеристик и адаптации транспортных средств. Например, внебортовая сеть может использоваться для хранения информации о рабочих характеристиках и адаптации транспортного средства после заправки на бензозаправочной станции. Другое транспортное средство, заправляющееся на той же самой станции, могло бы использовать информацию с предыдущего транспортного средства, чтобы адаптироваться под отличия топлива от текущих условий в баке.
В одном из примеров, способ для адаптивной калибровки выходного параметра силовой передачи транспортного средства может содержать выгрузку данных, собранных на борту каждого из первого и второго транспортных средств, имеющих согласующиеся характеристики силовой передачи, во внебортовую сеть; заполнение первой области первой калибровочной таблицы первого транспортного средства с использованием данных, собранных на борту первого транспортного средства; и загрузку данных, собранных на борту второго транспортного средства, из внебортовой сети для заполнения второй области первой калибровочной таблицы. Первая область первой калибровочной таблицы соответствует первому набору условий эксплуатации, и заполнение первой области с использованием данных, собранных на борту первого транспортного средства, происходит в ответ на то, что первое транспортное средство пребывает дольше, чем пороговая величина времени, в первом наборе условий эксплуатации. Вторая область первой калибровочной таблицы соответствует второму набору условий эксплуатации, отличному от первого набора условий эксплуатации, и заполнение второй области с использованием данных, собранных на борту второго транспортного средства, происходит в ответ на то, что первое транспортное средство пребывает меньше, чем пороговая величина времени, во втором наборе условий эксплуатации, и второе транспортное средство пребывает дольше, чем пороговая величина времени, во втором наборе условий эксплуатации. Способ дополнительно может содержать выгрузку данных, собранных на борту третьего транспортного средства, имеющего согласующиеся характеристики силовой передачи, во внебортовую сеть; и дополнительное заполнение второй области первой калибровочной таблицы первого транспортного средства с использованием взвешенных данных, собранных на борту третьего транспортного средства, взвешенные данные основаны на времени пребывания третьего транспортного средства во втором наборе условий эксплуатации относительно каждого из первого транспортного средства и второго транспортного средства. Кроме того, во время эксплуатации первого транспортного средства, регулировки для одного или более исполнительных механизмов силовой передачи могут настраиваться на основании первой калибровочной таблицы, заполненной данными, собранными на борту каждого из первого и второго транспортных средств.
Кроме того, данные второго и третьего транспортных средств могли бы усредняться совместно. Кроме того еще, может быть возможно уклоняться от воздействий данных, собранных на борту второго и третьего транспортных средств на несходных комбинациях силовой передачи, а затем применять настроенные данные к другим транспортным средствам и силовым передачам. Например бензин, купленный на заправочной станции транспортным средством, имеющим двигатель V8, может оказывать воздействие на работу двигателя, к примеру, испарение. Это воздействие может изучаться и иметься ввиду. «Изученное воздействие» затем могло бы применяться к транспортному средству, имеющему двигатель I4, когда заправляется топливом на той же самой станции, зная, что оно будет воздействовать подобным известным образом.
В кроме того дополнительных представлениях, способ для адаптации калибровочной таблицы транспортного средства включает в себя настройку точек данных калибровочной таблицы силовой передачи транспортного средства с использованием данных, собранных на борту транспортного средства за некоторое количество ездовых циклов, и с использованием данных, загруженных из внебортовой сети, загруженные данные собираются на борту одного или более других транспортных средств, поддерживающих связь с сетью, за количество ездовых циклов, при этом условия эксплуатации транспортного средства, покрытые транспортным средством за количество ездовых циклов, частично перекрываются или не перекрываются с условиями эксплуатации, покрытыми одним или более других транспортных средств. Одно или более транспортных средств могут выбираться на основании времени пребывания в условиях эксплуатации транспортного средства. Одно или более транспортных средств дополнительно могут выбираться, или взвешиваться, на основании местоположения эксплуатации относительно местоположения эксплуатации данного транспортного средства.
В качестве еще одного примера, способ для обновления калибровочной таблицы силовой передачи транспортного средства включает в себя выгрузку данных, собранных на борту каждого из первого, второго и третьего транспортных средств, имеющих согласующиеся характеристики силовой передачи, во внебортовую сеть; заполнение первой области первой калибровочной таблицы первого транспортного средства с использованием данных, собранных на борту первого транспортного средства; и загрузку данных, собранных на борту второго транспортного средства, из внебортовой сети для заполнения второй области первой калибровочной таблицы во время первого условия наряду с загрузкой данных, собранных на борту третьего транспортного средства, из внебортовой сети для заполнения второй области первой калибровочной таблицы во время второго условия. Во время первого условия, время пребывания второго транспортного средства во второй области первой калибровочной таблицы может быть большим наряду с тем, что, во время второго условия, время пребывания третьего транспортного средства во второй области первой калибровочной таблицы может быть большим.
В качестве альтернативы, время пребывания обоих, второго и третьего, транспортных средств может быть большим, а во время первого условия, второе транспортное средство может выбираться вследствие географического расположения второго транспортного средства относительно первого транспортного средства (например, второе транспортное средство находится ближе к или на меньшем, чем пороговое, расстоянии, от первого транспортного средства). В сравнение, во время второго условия, третье транспортное средство может выбираться вследствие географического расположения третьего транспортного средства относительно первого транспортного средства (например, второе транспортное средство находится ближе к или на меньшем, чем пороговое, расстоянии, от первого транспортного средства). Кроме того еще, время пребывания как второго, так и третьего транспортных средств может быть большим, и, во время первого условия, данные, собранные на борту второго транспортного средства могут взвешиваться выше, чем данные, собранные на борту третьего транспортного средства вследствие географического расположения второго транспортного средства относительно первого транспортного средства (по сравнению с относительным расположением третьего транспортного средства). В сравнение, во время второго условия, данные, собранные на борту третьего транспортного средства могут взвешиваться выше, чем данные, собранные на борту второго транспортного средства вследствие географического расположения третьего транспортного средства относительно первого транспортного средства (по сравнению с относительным расположением второго транспортного средства). В качестве альтернативы, обработка данных может выполняться на уровне внебортовой сети вместо уровня контроллера транспортного средства. На нем, более высокие возможности обработки облачной вычислительной системы могут преимущественно использоваться для выполнения взвешенного усреднения данных, собранных на борту многих транспортных средств, чтобы находить оптимальную (например, «наилучшую») калибровку.
В кроме того еще одном примере, контроллер может выгружать данные, собранные на борту третьего транспортного средства, имеющего согласующиеся характеристики силовой передачи, во внебортовую сеть; и дополнительно заполнять первую область первой калибровочной таблицы первого транспортного средства с использованием взвешенных данных, собранных на борту третьего транспортного средства, взвешенные данные основаны на времени пребывания третьего транспортного средства во вторых условиях эксплуатации относительно первого транспортного средства. Взвешенные данные дополнительно могут быть основаны на расположении третьего транспортного средства относительно первого транспортного средства. Например, данные, собранные на борту первого транспортного средства, могут взвешиваться выше, когда разность между данными, собранными на борту первого транспортного средства, и данными, собранными на борту третьего транспортного средства, является меньшей. Иначе, когда разность находится выше, могут взвешиваться выше данные, собранные на борту третьего транспортного средства. В дополнение, процедура диагностики компонентов силовой передачи может инициироваться на первом транспортном средстве в ответ на разность, являющуюся более высокой.
Этапы по фиг. 3-4, дополнительно конкретизированы примерным обновлением примерной калибровочной таблицы, изображенным на схеме 600 по фиг. 6. В частности, схема 600 показывает примерную калибровочную таблицу 602 транспортного средства «a» до обновления контроллером транспортного средства, примерный набор 604 внебортовых сетевых данных и обновленную калибровочную таблицу 606 транспортного средства «a». Набор внебортовых сетевых данных может включать наборы данных для транспортных средств «b», «c» и «d», которые могут иметь характеристики силовой передачи, согласующиеся с транспортным средством «a». Каждая калибровочная таблица может включать в себя множество ячеек, каждая из множества ячеек может соответствовать по меньшей мере двум условиям эксплуатации, условия эксплуатации включают в себя по меньшей мере два из числа оборотов двигателя, нагрузки двигателя, температуры двигателя, барометрического давления, содержания спирта в топливе, влажности окружающей среды и прочих. Набор данных калибровочной таблицы, показанный в материалах настоящей заявки является двухмерной (2D) характеристикой, графически изображенной в качестве функции числа оборотов и нагрузки двигателя. Набор внебортовых сетевых данных (включающий в себя данные для транспортных средств «b» «c» и «d») соответствует области чисел оборотов-нагрузок, представленной в калибровочной таблице транспортного средства «a». В некоторых примерах, калибровочная таблица может быть графически изображена на трехмерной (3D) характеристике в качестве функции по меньшей мере трех условий эксплуатации, условия эксплуатации включают в себя по меньшей мере три из числа оборотов двигателя, нагрузки двигателя, температуры двигателя, барометрического давления, содержания спирта в топливе, влажности окружающей среды и прочих.
Калибровочная таблица может включать в себя бортовые точки данных, такие как a1-a8 для транспортного средства «a», b1-b8 для транспортного средства «b», c1-c8 для транспортного средства «c», d1-d8 для транспортного средства «d» и e1-e8 для транспортного средства «e». Такие точки a1-a8 данных соответствуют точкам данных, собранным на борту транспортного средства «a» за многочисленные ездовые циклы транспортного средства, точки b1-b8 данных соответствуют точкам данных, собранных на борту транспортного средства «b» за многочисленные ездовые циклы транспортного средства, и так далее для транспортных средств «c», «d» и «e». Каждая ячейка в калибровочной таблице может включать в себя по меньшей мере одну точку данных. Точка данных может включать в себя абсолютную регулировку исполнительного механизма, адаптивный член, и т.д. Наборы данных для транспортных средств b, c, d и e присутствуют во внебортовой сети. Набор данных для транспортного средства «a» является набором бортовых данных, собранных, когда транспортное средство «a» находилось в эксплуатации потребителем. Каждая ячейка может быть ассоциативно связана с набором условий эксплуатации, и контроллер дополнительно может иметь информацию касательно времени пребывания данного транспортного средства в условиях эксплуатации для данной ячейки. По существу, время пребывания соответствует времени, которое транспортное средство провело в условиях эксплуатации, соответствующих данной ячейке, за один или более ездовых циклов транспортного средства. Точки данных, собранные на транспортном средстве в условиях эксплуатации ячеек с меньшим, чем пороговое, временем пребывания, указаны в прямоугольниках, обведенных пунктирными линиями. Эти точки данных могут быть менее зрелыми и могут требовать дальнейшего обновления, чтобы сделать их более достоверными. В сравнение, точки данных, собранные на транспортном средстве в условиях эксплуатации ячеек с большим, чем пороговое, временем пребывания, указаны в прямоугольниках, без пунктирных линий. Эти точки данных могут быть более зрелыми и могут требовать меньшего обновления (или отсутствия дальнейшего обновления), чтобы делать их более достоверными.
До обновления, калибровочная таблица 602 транспортного средства «a» может включать в себя точки a1-a8 данных. Точки a1-a4 данных представляют данные, собранные в области чисел оборотов-нагрузок, где транспортное средство «a» проработало в течение длительности, большей, чем пороговое значение. Следовательно, точки a1-a4 данных собирались на транспортном средстве с более длительными временами пребывания (большими, чем пороговое значение). Точки a5-a8 данных представляют данные, собранные в области чисел оборотов-нагрузок, где транспортное средство «a» проработало в течение длительности, меньшей, чем пороговое значение. Следовательно, точки a5-a8 данных могли быть собраны на транспортном средстве с более низкими временами пребывания.
Во внебортовой сети, транспортные средства «b», «c», «d» и «e» могли эксплуатироваться с временами пребывания, большими, чем пороговое значение, в условиях эксплуатации ячеек, соответствующих точкам b1-b2, b5-b8, c1-c4, c7-c8, d1-d4, d7-d8 и e1-e6 данных соответственно. То есть, в области чисел оборотов-нагрузок, в которой транспортное средство «a» имеет точки данных с временами пребывания, меньшими, чем пороговое значение, по меньшей мере одно из транспортных средств «b», «c» и «d» имеют времена пребывания, большие, чем пороговое значение. Другими словами, в области чисел оборотов-нагрузок, в которой транспортное средство «a» не проработало в течение длительности, большей, чем пороговое значение, по меньшей мере одно из транспортных средств «b», «c» или «d» эксплуатировалось в течение длительности, большей, чем пороговое значение, отсюда, обновили калибровочные данные для таких областей.
Во время обновления калибровочной таблицы, поскольку транспортное средство «a» в условиях эксплуатации ячеек с точками a1-a4 данных имеет времена пребывания, большие, чем пороговое значение, калибровочная таблица транспортного средства «a» может заполняться бортовыми точками a1-a4 данных. Однако, транспортное средство «a» в условиях эксплуатации ячеек с точками a5-a8 данных имеет время пребывания, меньшее, чем пороговое значение. Следовательно, значение ячеек с точками a5-a8 данных может настраиваться на основании данных с транспортных средств «b», «c» и «d», загруженных из внебортовой сети. Например, настроенная точка Δa5 данных может быть функцией b5 и e5, поскольку транспортные средства «b» и «e» в условиях эксплуатации ячеек с точками b5 и e5 данных имеют времена пребывания, большие, чем пороговое значение. Подобным образом, настроенная точка Δa6 данных может быть функцией b6 и e6, настроенная точка Δa7 данных может быть функцией b7, c7 и d7, а настроенная точка Δa8 данных может быть функцией b8, c8 и d8. В одном из примеров, калибровочная таблица транспортного средства «a» может настраиваться на основании бортовых данных и внебортовых сетевых данных, взвешенных согласно своим соответственным временам пребывания. В этом примере, Δa5 может быть функцией a5, b5 и e5, Δa6 может быть функцией a6, b6 и e6, Δa7 может быть функцией a7, b7, d7 и e7, а Δa8 может быть функцией a8, b8, c8 и d8.
В одном из примеров, калибровочная таблица может настраиваться на основании оптимизированного набора (например, статистического среднего) точек данных, загруженных из внебортовой сети, в условиях эксплуатации данной ячейки. В еще одном примере, на основании количества точек данных, имеющихся в распоряжении для условий эксплуатации данной ячейки во внебортовой сети, может рассчитываться значение достоверности. Кроме того, на основании значения достоверности, вес может назначаться точке данных, и может рассчитываться взвешенное среднее значение всех точек данных в условиях эксплуатации данной ячейки. В кроме того еще одном примере, калибровочная таблица может обновляться на основании значения достоверности для данных, собранных на борту. В этом примере, значение достоверности может назначаться точке данных для данной ячейки на основании работы транспортного средства в условиях эксплуатации данной ячейки. Значение достоверности бортовой точки данных может сравниваться со значением достоверности каждой точки данных во внебортовой сети в условиях эксплуатации данной ячейки для определения разности между значением достоверности бортовых данных и значением достоверности внебортовых сетевых данных. Если разность является большей, чем пороговое значение, данные (бортовые данные или внебортовые данные) с более высоким значением достоверности могут использоваться для обновления калибровочной таблицы. Если разность является меньшей, чем пороговое значение, среднее значение бортовых данных и внебортовых данных может рассчитываться для обновления калибровочной таблицы.
Таким образом, данные, собранные на борту множества транспортных средств и совместно используемые между ними с помощью сети, могут преимущественно использоваться для ускорения обновления калибровочной таблицы транспортного средства. В частности, вследствие всех различных ездовых циклов, в которых эксплуатируется парк транспортных средств, широкое многообразие условий эксплуатации может быть покрыто за более короткое время. Посредством использования внебортовых сетевых данных для оптимизации бортовой калибровочной таблицы для конкретного транспортного средства, калибровочная таблица для транспортного средства (эксплуатируемого в узком диапазоне условий эксплуатации) может доводиться до состояния зрелости для эксплуатации в более широком диапазоне условий эксплуатации. Посредством использования взвешенных глобальных данных для настройки отдельных ячеек данной калибровочной таблицы данного транспортного средства, среднее время адаптации может уменьшаться наряду с улучшением точности калибровки силовой передачи.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящей заявки, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и процедуры управления, раскрытые в материалах настоящей заявки, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные процедуры, описанные в материалах настоящей заявки, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машинно-читаемого запоминающего носителя в системе управления двигателем.
Будет принято во внимание, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Должно быть понятно, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ РАБОТЫ ПРИВОДА (ВАРИАНТЫ) | 2016 |
|
RU2711232C2 |
| АВТОМОБИЛЬНЫЙ ВИРТУАЛЬНЫЙ ДАТЧИК ВЛАЖНОСТИ | 2014 |
|
RU2649937C2 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ, СОХРАНЕНИЯ И ПЕРЕДАЧИ ДАННЫХ ОТ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПОДВИЖНОГО ОБЪЕКТА | 2021 |
|
RU2839362C1 |
| СПОСОБ ДЛЯ ОЦЕНИВАНИЯ ВЛАЖНОСТИ ОКРУЖАЮЩЕЙ СРЕДЫ | 2015 |
|
RU2696843C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2017 |
|
RU2723577C2 |
| СПОСОБ БОРТОВОЙ ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ БОРТОВОЙ ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2015 |
|
RU2670579C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ КАТАЛИТИЧЕСКИМ НЕЙТРАЛИЗАТОРОМ С ОБРАТНОЙ СВЯЗЬЮ | 2017 |
|
RU2704902C2 |
| СИСТЕМА ДВИГАТЕЛЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2013 |
|
RU2653456C2 |
| СИСТЕМА И СПОСОБ ДЛЯ БОРТОВОЙ ОБРАБОТКИ ДАННЫХ | 2017 |
|
RU2698147C2 |
| СИСТЕМА УПРАВЛЕНИЯ И ВЫЧИСЛЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2654162C2 |
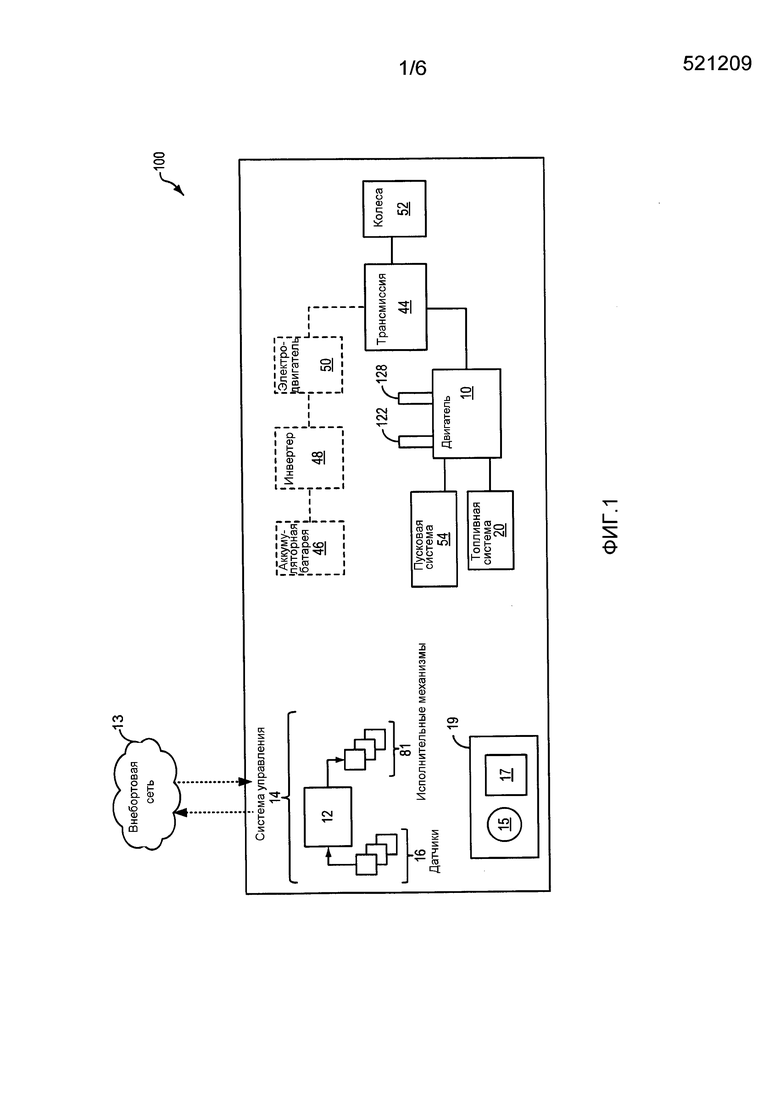
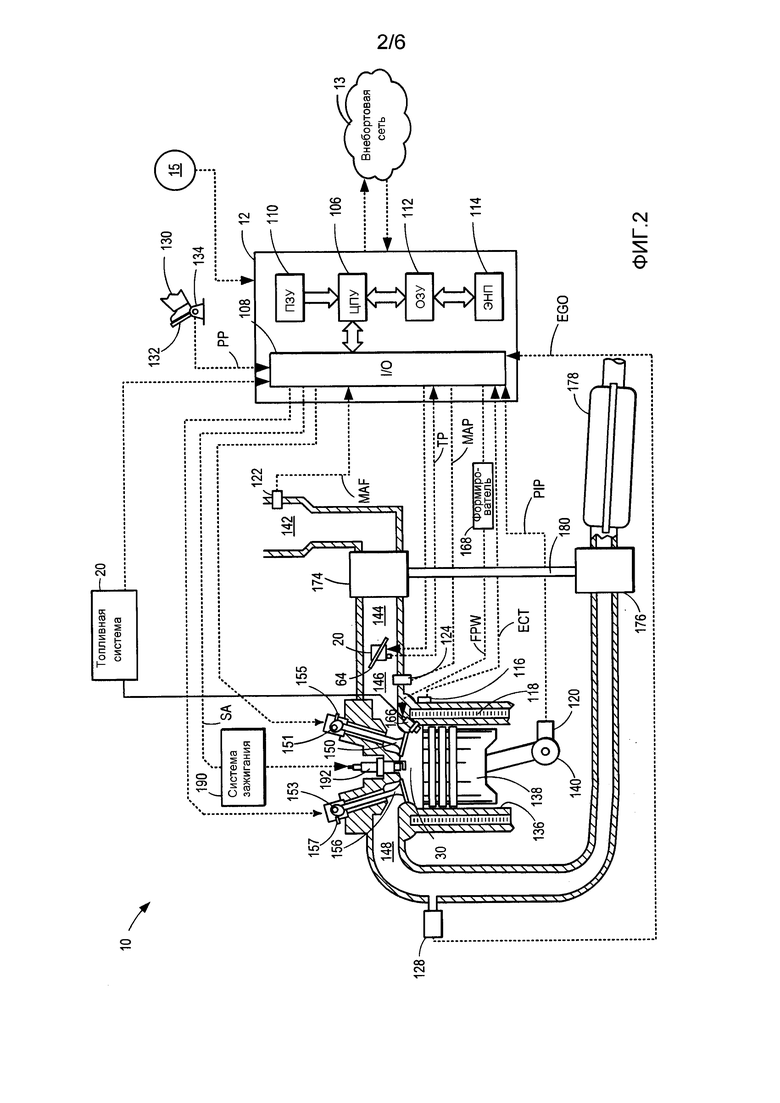
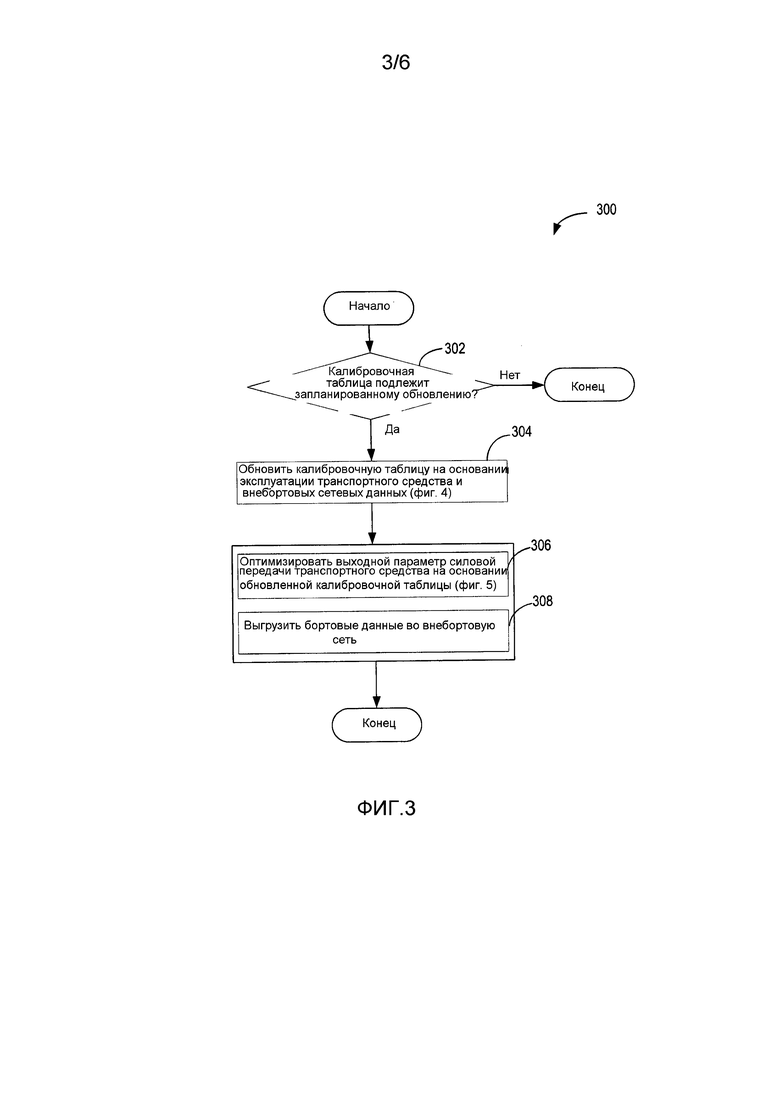
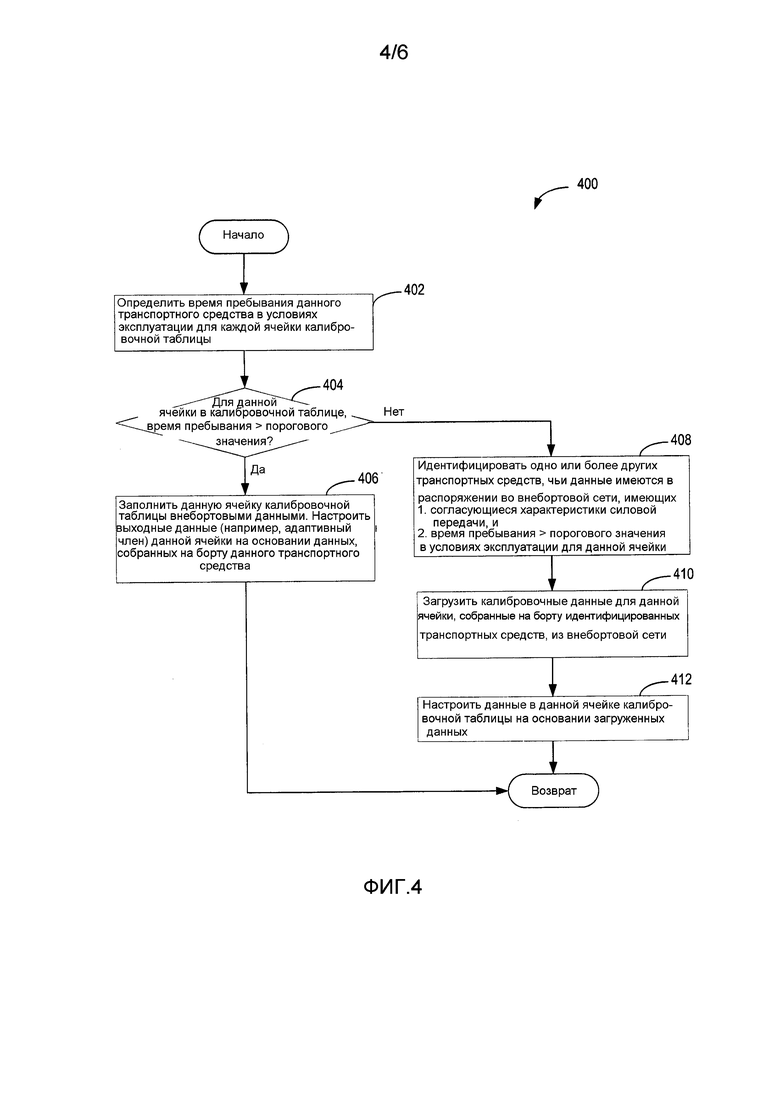

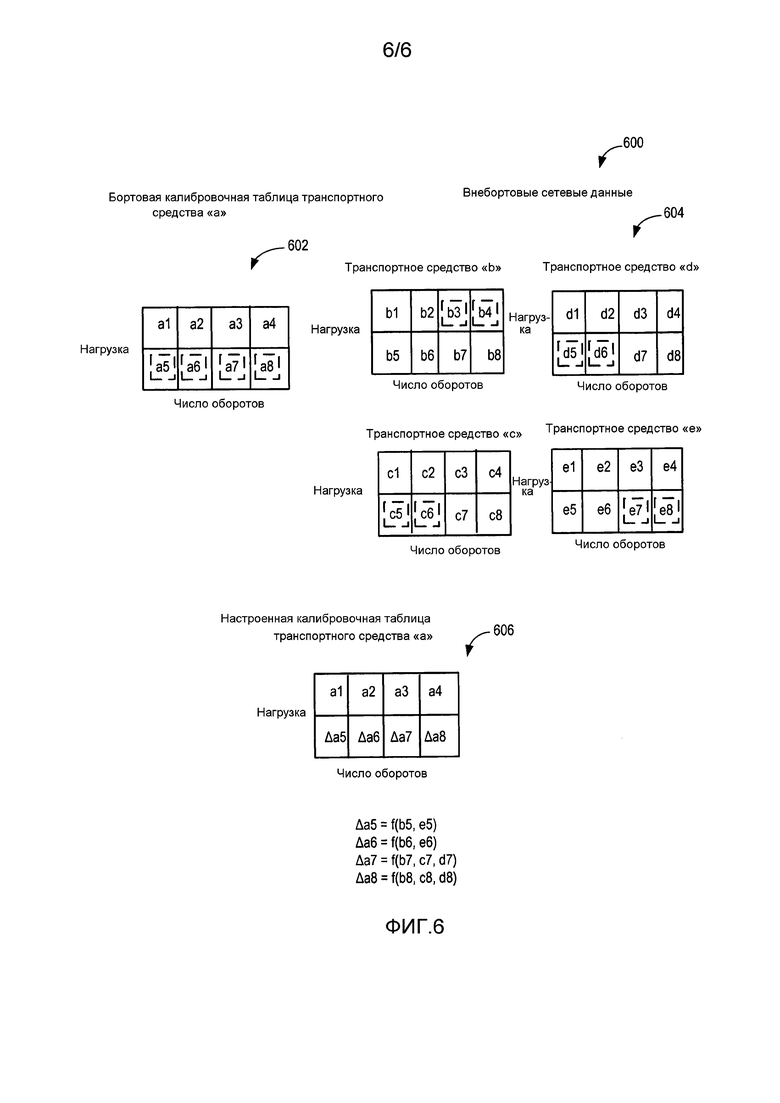
Изобретение относится к системам и способам для улучшения калибровки выходного параметра двигателя и силовой передачи. Способ управления двигателем и силовой передачей транспортного средства включает настройку контроллером двигателя точек данных калибровочной таблицы силовой передачи транспортного средства и настройку исполнительного механизма в транспортном средстве на основании одной или более настроенных точек данных калибровочной таблицы силовой передачи транспортного средства. Данные собраны на борту транспортного средства посредством сигналов, принятых в контроллере двигателя от одного или более датчиков, связанных с двигателем, и загружены из внебортовой сети. Данные, загруженные из внебортовой сети, собираются на борту одного или более других транспортных средств, поддерживающих связь с внебортовой сетью. Настройка точек данных калибровочной таблицы заключается в том, что когда первое время пребывания транспортного средства в условиях эксплуатации для данной ячейки калибровочной таблицы больше, чем пороговое значение, заполняют калибровочную таблицу данными, собранными на борту транспортного средства в условиях эксплуатации для данной ячейки. Достигается оптимизация выходного параметра двигателя и силовой передачи. 3 н. и 15 з.п. ф-лы, 6 ил.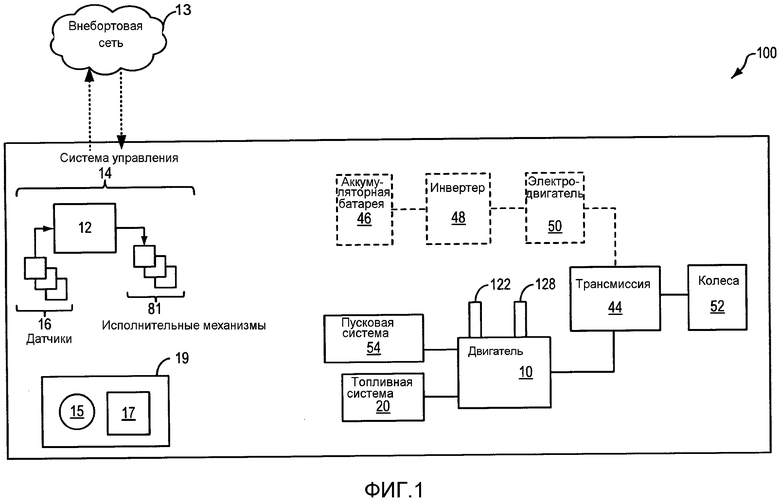
1. Способ управления двигателем и силовой передачей транспортного средства, состоящий в том, что:
настраивают контроллером двигателя точки данных калибровочной таблицы силовой передачи транспортного средства, хранящейся в памяти, связанной с возможностью обмена данными с контроллером двигателя, с использованием данных, собранных на борту транспортного средства посредством сигналов, принятых в контроллере двигателя от одного или более датчиков, связанных с двигателем транспортного средства, и с использованием данных, загруженных из внебортовой сети, причем данные, загруженные из внебортовой сети, собираются на борту одного или более других транспортных средств, поддерживающих связь с внебортовой сетью; и
выполняют настройку исполнительного механизма в транспортном средстве на основании одной или более настроенных точек данных калибровочной таблицы силовой передачи транспортного средства, причем настройка точек данных упомянутой калибровочной таблицы заключается в том, что, когда первое время пребывания транспортного средства в условиях эксплуатации для данной ячейки упомянутой калибровочной таблицы больше, чем пороговое значение, заполняют упомянутую калибровочную таблицу данными, собранными на борту транспортного средства в условиях эксплуатации для упомянутой данной ячейки.
2. Способ по п. 1, в котором настройка точек данных заключается в том, что настраивают каждую точку данных калибровочной таблицы силовой передачи транспортного средства, и при этом каждая точка данных упомянутой калибровочной таблицы силовой передачи включает в себя одно из выходного параметра двигателя и выходного параметра трансмиссии.
3. Способ по п. 1, в котором данные, собранные на борту транспортного средства, включают в себя данные, собранные на борту транспортного средства, находящегося в использовании потребителем, и при этом данные, загруженные из внебортовой сети, собираются на борту одного или более других транспортных средств, находящихся в использовании соответственными потребителями.
4. Способ по п. 1, в котором упомянутая калибровочная таблица включает в себя множество ячеек, причем каждая из множества ячеек соответствует по меньшей мере двум условиям эксплуатации, причем по меньшей мере два условия эксплуатации включают в себя по меньшей мере два из числа оборотов двигателя, нагрузки двигателя, температуры двигателя, барометрического давления, содержания спирта в топливе, влажности окружающей среды и октанового числа топлива.
5. Способ по п. 1, в котором настройка точек данных упомянутой калибровочной таблицы дополнительно заключается в том, что, когда первое время пребывания транспортного средства в условиях эксплуатации для упомянутой данной ячейки меньше, чем пороговое значение, загружают данные, собранные для упомянутой данной ячейки на борту одного или более других транспортных средств, имеющих второе время пребывания, большее, чем пороговое значение, в условиях эксплуатации для данной ячейки и заполняют упомянутую данную ячейку упомянутой калибровочной таблицы на основании загруженных данных.
6. Способ по п. 1, в котором внебортовая сеть включает в себя облачную вычислительную систему.
7. Способ по п. 1, в котором упомянутое транспортное средство также поддерживает связь с внебортовой сетью, дополнительно состоящий в том, что выгружают данные, собранные на борту упомянутого транспортного средства, во внебортовую сеть.
8. Способ по п. 1, в котором выходные данные калибровочной таблицы силовой передачи транспортного средства включают в себя одно из выходного параметра двигателя, выходного параметра исполнительного механизма двигателя, выходного параметра трансмиссии, выходного параметра исполнительного механизма трансмиссии и выходного параметра электродвигателя гибридного привода.
9. Способ по п. 8, в котором выходной параметр двигателя включает в себя одно или более из числа оборотов двигателя и нагрузки двигателя, при этом выходной параметр исполнительного механизма двигателя включает в себя одно или более из установки фаз клапанного распределения, установки фаз кулачкового распределения, установки момента впрыска, величины впрыска, интенсивности рециркуляции отработавших газов, соотношения разделения впрыска топлива, опережения зажигания и давления наддува, при этом выходной параметр трансмиссии включает в себя одно или более из выбора передачи и плана переключения, и при этом выходной параметр исполнительного механизма трансмиссии включает в себя одно или более из давления в магистрали трансмиссии, характеристик соленоида переключения, интенсивности блокировки гидротрансформатора, интенсивности пробуксовки муфты трансмиссии.
10. Способ по п. 1, в котором одно или более других транспортных средств имеют характеристики силовой передачи, согласующиеся с характеристиками силовой передачи упомянутого транспортного средства, и при этом упомянутая настройка заключается в том, что осуществляют автоматическую настройку во время инициирования ездового цикла транспортного средства, завершения ездового цикла транспортного средства или во время запланированного обновления.
11. Способ по п. 1, дополнительно состоящий в том, что, во время эксплуатации транспортного средства, настраивают один или более исполнительных механизмов двигателя и силовой передачи на основании условий эксплуатации двигателя и дополнительно на основании настроенной калибровочной таблицы транспортного средства.
12. Способ управления двигателем и силовой передачей транспортного средства, состоящий в том, что:
для каждого из первого и второго транспортных средств, имеющих согласующиеся характеристики силовой передачи, выгружают контроллером двигателя для этого транспортного средства данные, собранные на борту этого транспортного, во внебортовую сеть;
заполняют контроллером двигателя первого транспортного средства первую область первой калибровочной таблицы, хранящейся в памяти первого транспортного средства, с использованием данных, собранных на борту первого транспортного средства;
загружают контроллером двигателя первого транспортного средства из внебортовой сети данные, собранные на борту второго транспортного средства, для заполнения второй области первой калибровочной таблицы, хранящейся в памяти первого транспортного средства; и
выполняют настройку исполнительного механизма для одного или более исполнительных механизмов первого транспортного средства на основании выходных данных одной или более ячеек первой калибровочной таблицы, при этом первая область первой калибровочной таблицы соответствует первому набору условий эксплуатации, и при этом заполнение упомянутой первой области с использованием данных, собранных на борту первого транспортного средства, происходит в ответ на то, что первое транспортное средство пребывает дольше, чем пороговая величина времени, в первом наборе условий эксплуатации.
13. Способ по п. 12, в котором вторая область первой калибровочной таблицы соответствует второму набору условий эксплуатации, отличному от первого набора условий эксплуатации, и при этом заполнение второй области с использованием данных, собранных на борту второго транспортного средства, происходит в ответ на то, что первое транспортное средство пребывает меньше, чем пороговая величина времени, во втором наборе условий эксплуатации, и второе транспортное средство, пребывает дольше, чем пороговая величина времени, во втором наборе условий эксплуатации.
14. Способ по п. 13, дополнительно состоящий в том, что:
выгружают данные, собранные на борту третьего транспортного средства, имеющего согласующиеся характеристики силовой передачи, во внебортовую сеть; и
дополнительно заполняют вторую область первой калибровочной таблицы первого транспортного средства с использованием взвешенных данных, собранных на борту третьего транспортного средства, причем взвешенные данные основаны на времени пребывания третьего транспортного средства во втором наборе условий эксплуатации относительно каждого из первого транспортного средства и второго транспортного средства.
15. Способ по п. 14, в котором упомянутая калибровочная таблица является калибровочной таблицей силовой передачи транспортного средства, причем упомянутый способ дополнительно состоит в том, что, во время эксплуатации первого транспортного средства настраивают регулировки одного или более исполнительных механизмов силовой передачи на основании первой калибровочной таблицы, заполненной данными, собранными на борту каждого из первого и второго транспортных средств.
16. Система для управления двигателем и силовой передачей транспортного средства, причем силовая передача присоединена между двигателем и колесами транспортного средства, при этом упомянутая система содержит:
один или более исполнительных механизмов, выполненных с возможностью изменять выходной параметр силовой передачи;
модуль связи для присоединения системы транспортного средства с возможностью обмена информацией к внебортовой облачной сети; и
контроллер с машинно-читаемыми командами, содержащимися в невременной памяти, для:
сохранения данных, сформированных на борту транспортного средства, локально, также наряду с выгрузкой сформированных на борту данных во внебортовую облачную сеть;
на основании условий эксплуатации, в которых данные были сформированы на борту транспортного средства, и дополнительно на основании времени пребывания транспортного средства в условиях эксплуатации, заполнения одной или более ячеек калибровочной таблицы силовой передачи; и
загрузки данных, соответствующих незаполненным ячейкам калибровочной таблицы силовой передачи, из внебортовой облачной сети, причем загруженные данные сформированы на борту одного или более других транспортных средств; и
настройки регулировок для одного или более исполнительных механизмов на основании упомянутой калибровочной таблицы.
17. Система по п. 16, в которой заполнение на основании условий эксплуатации и упомянутого времени пребывания транспортного средства включает в себя заполнение ячейки сформированными на борту данными, если первое время пребывания транспортного средства в условиях эксплуатации, соответствующих ячейке, больше, чем пороговая величина, и не заполнение ячейки сформированными на борту данными, если первое время пребывания транспортного средства в условиях эксплуатации, соответствующих ячейке, меньше, чем пороговая величина.
18. Система по п. 17, в которой загрузка включает в себя загрузку данных, сформированных на борту одного или более других транспортных средств, имеющих большее, чем пороговая величина, время пребывания в условиях эксплуатации, соответствующих незаполненным ячейкам упомянутой калибровочной таблицы, причем одно или более других транспортных средств имеют характеристики силовой передачи, которые согласуются с характеристиками силовой передачи упомянутого транспортного средства.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2499705C2 |

