Область техники
Настоящее изобретение относится, в основном, к способам и системам для классификации типа и веса прицепа, буксируемого автомобилем, и для автоматической регулировки соответствующего режима работы.
Уровень техники/Краткое изложение
Автомобили имеют возможность буксировать различные виды прицепов и/или грузов. Блоки управления трансмиссией автомобиля выполнены с возможностью оптимизировать производительность автомобиля с заранее заданной рабочей массой. Следовательно, условия эксплуатации автомобиля, возможно, должны быть изменены после присоединения прицепа и/или груза к автомобилю. Например, автомобили могут иметь специализированный рабочий режим, при котором эксплуатация автомобиля оптимизирована для буксировочных операций. Рабочий режим может быть выбран автоматически или включен по команде водителя. Однако, для того чтобы улучшить производительность автомобиля во время буксирования, размер, вес и другие характеристики буксируемого прицепа, возможно, должны быть введены в контроллер автомобиля.
Соответственно, были предложены различные подходы для обнаружения прицепа и/или груза, присоединенного к автомобилю. Например, один подход, предложенный Хессмертом и др. в патенте США 6655222, раскрывает способ определения нагрузки в виде прицепа, присоединенного к автомобилю, на основе оценки текущего дорожного градиента. В этом случае используются силы контакта колес для оценки текущего дорожного градиента и полной массы системы автомобиля. Если прицеп и/или груз соединены с автомобилем, то полная масса системы автомобиля, как ожидается, будет больше, чем стандартная масса самого автомобиля. Контроллер автомобиля может использовать различие в массе для обнаружения прицепа и/или груза, соединенного с автомобилем, а также для определения массы присоединенного прицепа и/или груза.
Однако авторы настоящего изобретения обнаружили возможные недостатки в вышеупомянутых подходах. Например, такие подходы могут не позволить эффективно определить размер прицепа, а в особенности размер и, возможно, форму лобовой части прицепа. Кроме того, для прицепа заданной массы, основанной на размере лобовой части, могут измениться силы контакта колес. Силы контакта колес могут также измениться в зависимости от скорости автомобиля и мгновенных дорожных условий (которые могут отличаться от усредненных дорожных условий). В отсутствие точной оценки характеристик прицепа автомобилю, вероятно, придется часто переключать передачу, что вызывает виляние, задержки и сложности при ускорении и, таким образом, влияет на ощущение от вождения. Кроме того, работа автомобиля с более высоким, чем ожидаемый, весом без значительных регулировок работы трансмиссии может привести к увеличенному расходу топлива и высокому уровню напряжений на компонентах трансмиссии, что приводит к проблемам с гарантией на автомобиль. Эксплуатация автомобиля без компенсации дополнительной буксируемой нагрузки может также повлиять на стабильность автомобиля и управление.
Авторы настоящего изобретения определили подход, позволяющий, по меньшей мере частично решить вышеуказанные проблемы. Один пример способа содержит, во время движения автомобиля по дорожному сегменту, выявление характеристик прицепа, присоединенного к автомобилю, на основе дорожного градиента, определяемого в режиме реального времени, относительно ожидаемого дорожного градиента для соответствующего дорожного сегмента; и регулирование работы автомобиля на основе выявленных характеристик. В результате, характеристики прицепа могут быть достоверно определены, и работу двигателя могут регулировать соответствующим образом.
Например, система управления автомобиля может автоматически обнаруживать присутствие и детали прицепа и/или груза, присоединенного к автомобилю, во время движения автомобиля, на основе оценки дорожного градиента в режиме реального времени. Контроллер может в режиме реального времени оценить градиент дороги, по которой движется автомобиль, на основе оценки сил, приложенных к колесам.
Оценку сил, приложенных к колесам, могут выполнить во время различных условий движения, например, во время ускорения, замедления и установившихся скоростей автомобиля, а также на дорожных сегментах, имеющих изменения уклона. Оценку дорожного градиента, выполненную в режиме реального времени, затем сравнивают с внешней информацией, содержащей оценку дорожного градиента, например, с информацией карты, хранящейся не в самом автомобиле, а полученной при помощи навигационной системы автомобиля. Таким образом, на оценку дорожного градиента, выполненную в режиме реального времени и на основе сил, действующих на колеса, может влиять размер (габариты и объем прицепа), вес (масса прицепа) и размер (габариты и объем) лобовой части прицепа, присоединенного к автомобилю. На основе разности между оценкой дорожного градиента, выполненной в режиме реального времени, и внешней информацией по дорожному градиенту, контроллер может определить, происходит ли буксировка прицепа автомобилем, и затем определить характеристики прицепа, например, размер прицепа, его вес и размер лобовой части. В частности, различие между силами, действующими на колеса при оценке в режиме реального времени, и полученной извне оценкой может быть объяснено дополнительной нагрузкой, буксируемой автомобилем. Например, на основе сравнения, контроллер может определить, тяжел прицеп или легок, и далее определить, имеет ли прицеп большую или маленькую лобовую часть. Например, классификация присоединенного прицепа может быть выполнена автоматически без необходимости какого-либо участия водителя. На основе полученных характеристик прицепа, могут регулировать рабочие параметрами двигателя автомобиля, чтобы улучшить производительность автомобиля. Например, могут регулировать график переключения передач и режим использования топлива. В качестве необязательного варианта, если внешняя карта недоступна, может быть сгенерирована бортовая карта для часто используемого при движении дорожного сегмента, на основе оценки градиента в режиме реального времени, и использована во время следующих поездок на данном дорожном сегменте.
Таким образом, сравнивая измеренный (в режиме реального времени) дорожный градиент со значением ожидаемого дорожного градиента, полученного извне, возможно не только определить наличие прицепа, но также и оценить характеристики прицепа, в том числе, его размер, вес и размер лобовой части. Сравнение заключается в определении разности сил, действующих на колеса, то есть разности между измеренной оценкой и ожидаемой оценкой, связанной с некоторыми характеристиками прицепа, такими как наличие маленькой или большой лобовой части. Достоверное определение характеристик прицепа (в том числе, параметров веса, размера и размера лобовой части прицепа) во время движения автомобиля, позволяет оптимизировать производительность двигателя для определенного вида прицепа, что позволяет улучшить ощущения от вождения для водителя, управление температурой трансмиссии и топливную экономичность. Технический эффект от создания и обновления бортовой карты с информацией о дорожном градиенте состоит в том, что даже в отсутствие внешней карты, например, из-за отсутствия беспроводного подключения и/или навигационных данных, бортовую карту могут эффективно использовать для определения характеристик прицепа.
Следует подразумевать, что вышеприведенное краткое изложение дано для информирования в упрощенной форме о выборе решений, раскрытых далее в подробном описании. Краткое изложение не предназначено для идентификации главных или существенных отличительных признаков заявленного существа изобретения, объем которого определен единственным образом формулой изобретения, которая следует за подробным описанием. Кроме того, заявленное существо изобретения не ограничивается реализациями, которые устраняют какие-либо недостатки, отмеченные выше или в любой части этого раскрытия.
Краткое описание иллюстраций
На фиг. 1 показан пример системы автомобиля с присоединенным прицепом.
На фиг. 2А показан пример системы автомобиля с легким прицепом, имеющим маленькую лобовую часть и присоединенным к автомобилю.
На фиг. 2В показан пример системы автомобиля с легким прицепом, имеющим большую лобовую часть и присоединенным к автомобилю.
На фиг. 2С показан пример системы автомобиля с тяжелым прицепом, имеющим маленькую лобовую часть и присоединенным к автомобилю.
На фиг. 2D показан пример системы автомобиля с тяжелым прицепом, имеющим большую лобовую часть и присоединенным к автомобилю.
На фиг. 3 показана блок-схема алгоритма, иллюстрирующая способ, который может быть использован для определения дорожного градиента дорожного сегмента в режиме реального времени во время движения автомобиля.
На фиг. 4 показана блок-схема алгоритма, иллюстрирующая способ, который может быть использован для определения характеристик прицепа посредством сравнения оценки дорожного градиента, полученной в режиме реального времени, и оценки ожидаемого дорожного градиента.
На фиг. 5 показан пример различия между маленьким и большим прицепом, на основе оценок дорожного градиента.
На фиг. 6 показан пример различия между легким и тяжелым прицепом, на основе оценок дорожного градиента.
На фиг. 7 показан пример различия между прицепом с маленькой лобовой частью и прицепом с большой лобовой частью, на основе оценок дорожного градиента.
Подробное описание
Следующее раскрытие относится к системам и способам для классификации типа и веса прицепа, буксируемого системой автомобиля, такой как система автомобиля, показанная на фиг. 1. Прицеп, присоединенный к системе автомобиля, как показано на фиг. 1, может иметь различные характеристики (размер, вес, размер лобовой части), как показано посредством примеров на фиг. 2А, 2В, 2С и 2D. Контроллер двигателя имеет возможность выполнять управляющую программу, например, программу, показанную в качестве примера на фиг. 3, для определения в режиме реального времени дорожного градиента дорожного сегмента, по которому двигается система автомобиля с прицепом, и сравнения указанного градиента с ожидаемым дорожным градиентом, полученным из источника, внешнего по отношению к автомобилю. Затем контроллер может выполнить управляющую программу, такую как программа, показанная на фиг. 4, для определения характеристик прицепа, присоединенного к системе автомобиля, показанной на фиг. 1, на основе сравнения указанных дорожных градиентов. На фиг. 5, 6 и 7 показаны примеры определения типа прицепа на основе сравнения оценок дорожного градиента во время различных условий движения. Таким образом, может быть улучшена производительность буксирующего автомобиля.
На фиг. 1 показан пример варианта реализации системы 100 автомобиля, содержащей автомобиль 110 с присоединенным прицепом 120. В этом примере автомобиль 110 является автомобилем для движения по дороге, имеющим две пары колес 75. Автомобиль 110 содержит двигатель 10 внутреннего сгорания, содержащий несколько цилиндров или камер сгорания, один из которых (цилиндр 14) изображен на фиг. 1. Автомобиль 110 также содержит трансмиссию (не показанную на схеме) с несколькими комплектами шестерен, причем трансмиссия соединяет двигатель 10 с колесами 75 автомобиля. Двигателем 10 может управлять, по меньшей мере частично, система управления при помощи контроллера 12 и с использованием входных сигналов от водителя 130, подаваемых через вводное устройство 132. В этом примере вводное устройство 132 содержит педаль акселератора и датчик 134 положения педали для генерации сигнала ПП (РР), пропорционального положению педали. Цилиндр 14 (камера сгорания) двигателя 10 может содержать стенки 136 камеры сгорания с расположенным в них поршнем 138. Поршень 138 может быть соединен с коленчатым валом 140 таким образом, чтобы поступательные движения поршня могли быть преобразованы во вращательное движение коленчатого вала. Коленчатый вал 140 может быть соединен по меньшей мере с одним ведущим колесом пассажирского автомобиля через систему трансмиссии. Кроме того, стартер может быть соединен с коленчатым валом 140 посредством маховика, для обеспечения запуска двигателя 10.
Цилиндр 14 может получать впускной воздух через набор патрубков 142, 144 и 146 впускного воздуха. Патрубок 146 впускного воздуха может сообщаться с другими цилиндрами двигателя 10 в дополнение к цилиндру 14. В некоторых вариантах реализации один или несколько впускных патрубков могут содержать устройство наддува, например, турбонагнетатель или механический нагнетатель. Дроссель 162, содержащий дроссельную заслонку 164, может быть расположен во впускном патрубке двигателя для изменения расхода и/или давления впускного воздуха, подаваемого к цилиндрам двигателя. Например, дроссель 162 может быть расположен ниже по потоку или выше по потоку компрессора (не показанного на схеме).
Выпускной патрубок 148 может принимать отработавшие газы из других цилиндров двигателя 10 в дополнение к цилиндру 14. Датчик 128 отработавших газов показан в соединении с выпускным патрубком 148, выше по потоку относительно устройства 178 снижения токсичности отработавших газов. Датчик 128 может представлять собой любой подходящий датчик для определения воздушно-топливного отношения в отработавших газах, например, может представлять собой линейный кислородный датчик или универсальный/широкодиапазонный датчик кислорода в отработавших газах УДКОГ (UEGO), бистабильный кислородный датчик или датчик кислорода в отработавших газах EGO (ДКОГ), датчик НДКОГ (HEGO или нагреваемый EGO), датчик NOx, НС или СО. Устройство 178 снижения токсичности отработавших газов может представлять собой трехкомпонентный катализатор ТКК (TWC), уловитель NOx, различные другие устройства снижения токсичности отработавших газов или комбинацию указанных устройств.
Каждый цилиндр двигателя 10 может содержать один или несколько впускных клапанов и один или несколько выпускных клапанов. Например, показано, что цилиндр 14 содержит по меньшей мере один впускной тарельчатый клапан 150 и по меньшей мере один выпускной тарельчатый клапан 156, расположенный в верхней части цилиндра 14. В некоторых конструкциях каждый цилиндр двигателя 10, в том числе, цилиндр 14, может содержать по меньшей мере два впускных тарельчатых клапана и по меньшей мере два выпускных тарельчатых клапана, расположенных в верхней части цилиндра.
Контроллер 12 имеет возможность управлять впускным клапаном 150 посредством привода 152. Точно так же контроллер 12 имеет возможность управлять выпускным клапаном 156 посредством привода 154. Во время некоторых режимов работы контроллер 12 может изменять сигналы, подаваемые к приводам 152 и 154, чтобы управлять открытием и закрытием соответствующих впускных и выпускных клапанов. Положение впускного клапана 150 и выпускного клапана 156 могут определять при помощи соответствующих позиционных датчиков клапанов (не показано на схеме). Приводы клапана могут быть выполнены в виде электропривода клапанов, кулачкового привода или их комбинации. Синхронизацией впускного клапана и выпускного клапана могут управлять одновременно или могут использовать какую-либо возможность изменения синхронизации впускного кулачка, изменения синхронизации выпускного кулачка, двойного независимого изменения фаз кулачкового распределения или фиксированную синхронизацию кулачка. Каждая система кулачкового привода может содержать один или несколько кулачков и может использовать одну или несколько систем переключения профиля кулачков ППК (CPS), изменения фаз кулачкового распределения ИФКР (VCT), изменения фаз газораспределения ИФГ (VVT) и/или изменения высоты подъема клапанов ИВПК (VVL), с возможностью управления от контроллера 12, для изменения работы клапанов. Например, цилиндр 14 может в качестве альтернативы содержать впускной клапан, управляемый при помощи электропривода клапанов, и выпускной клапан, управляемый при помощи кулачкового привода, содержащего системы ППК и/или ИФКР. В других конструкциях впускным и выпускным клапанами могут управлять при помощи общего привода клапанов или системы приводов, а также с помощью привода или системы приводов для изменения фаз газораспределения.
Цилиндр 14 может иметь степень сжатия, представляющую собой отношение объемов камеры сгорания для положений поршня 138 в нижней мертвой точке и в верхней мертвой точке соответственно. Обычно значение степени сжатия может находиться в диапазоне от 9:1 до 10:1. Однако в некоторых примерах, где используются другие виды топлива, степень сжатия могут увеличить. Это могут применять, например, при использовании топлива с более высоким октановым числом или топлива с более высокой удельной теплотой парообразования. Степень сжатия могут также увеличить при использовании прямого впрыска, благодаря его влиянию на детонацию в двигателе.
В некоторых конструкциях каждый цилиндр двигателя 10 может содержать свечу 192 зажигания для запуска процесса сгорания. Система 190 зажигания может обеспечить искру зажигания для камеры 14 сгорания при помощи свечи 192 зажигания при получении сигнала опережения зажигания ОЗ (SA) от контроллера 12, для выбранных режимов работы. Однако в некоторых конструкциях свеча 192 зажигания может отсутствовать, если двигатель 10 имеет возможность использовать процесс сгорания с самовоспламенением или воспламенением при помощи впрыска топлива, как может быть реализовано в некоторых дизельных двигателях.
В некоторых конструкциях каждый цилиндр двигателя 10 может быть выполнен с одним или несколькими топливными инжекторами для подачи топлива. В качестве не ограничивающего примера, показан цилиндр 14 с двумя топливными инжекторами 166 и 170. Топливный инжектор 166 показан соединенным непосредственно с цилиндром 14, что обеспечивает впрыск топлива непосредственно в цилиндр, пропорционально ширине импульса впрыска ШИВ-1 (FPW-1), получаемого от контроллера 12 через электронный преобразователь 168. В этом случае топливный инжектор 166 обеспечивает процесс, известный как прямой впрыск ПВ (DI) топлива в цилиндр 14 для сгорания. Несмотря на то, что на фиг. 1 показан топливный инжектор 166 как боковой инжектор, его могут поместить над поршнем, например, рядом со свечой 192 зажигания. Такое положение может улучшить смешивание и сгорание при эксплуатации двигателя с топливом на спиртовой основе, из-за более низкой испаряемости некоторых видов топлива на спиртовой основе. В качестве альтернативы, топливный инжектор могут разместить над впускным клапаном или рядом с ним для улучшения смешивания. Топливо могут подавать к топливному инжектору 166 от топливной системы 172 высокого давления, содержащей топливный бак, топливные насосы, топливную рампу и электронный преобразователь 168. В качестве альтернативы, топливо могут подавать одноступенчатым насосом с низким давлением, и в этом случае синхронизация для прямого впрыска топлива может быть более ограничена во время такта сжатия, по сравнению с системой впрыска под высоким давлением. Кроме того, хотя это и не показано на схеме, топливный бак может иметь измерительный преобразователь давления, подающий сигнал в контроллер 12.
Показано, что топливный инжектор 170 встроен во впускной патрубок 146, а не в цилиндр 14, что образует конфигурацию, известную как впрыск топлива во впускные каналы ВТВК (PFI), в настоящем примере с впрыском во впускной порт выше по потоку от цилиндра 14. Топливный инжектор 170 имеет возможность впрыскивать топливо пропорционально ширине импульса сигнала впрыска ШИВ-2 (FPW-2), получаемого от контроллера 12 через электронный преобразователь 171. Топливная система 172 имеет возможность подавать топливо в топливный инжектор 170. Топливо может поступать в цилиндр из обоих инжекторов за время одного цикла цилиндра. Например, каждый инжектор может доставлять всю порцию топлива для впрыска, предназначенную для сжигания в цилиндре 14. Кроме того, распределение и/или относительное количество топлива, подаваемого из каждого инжектора, могут изменять в зависимости от условий работы, например, нагрузки двигателя и/или детонации, например, как раскрыто здесь ниже.
Топливный бак в топливной системе 172 может содержать топливо с различными топливными качествами, например, различные топливные составы. Эти различия могут заключаться в различном содержании спирта, различных октановых числах, различных значениях теплоты парообразования, различных топливных смесях и/или комбинации этих факторов и т.д. Как раскрыто выше, на фиг. 1 показан только один цилиндр многоцилиндрового двигателя. Аналогичным образом, каждый цилиндр может содержать свой набор впускных/выпускных клапанов, топливный инжектор (инжекторы), свечу зажигания и т.д. Как раскрыто здесь, использование топлива могут регулировать в зависимости от наличия прицепа и, кроме того, в зависимости от характеристик прицепа, определяемых в режиме реального времени во время движения автомобиля.
На фиг. 1 контроллер 12 показан как микрокомпьютер, содержащий микропроцессорное устройство 106, порты 108 ввода/вывода, электронный носитель данных для выполняемых программ и калибровочных значений, показанный в этом конкретном примере в виде микросхемы 111 постоянного запоминающего устройства, оперативное запоминающее устройство 112, энергонезависимое запоминающее устройство 114 и шину данных. Контроллер 12 может получать различные сигналы от датчиков, присоединенных к двигателю 10, и, кроме тех сигналов, которые были приведены выше, может получать данные измерения поступающего массового расхода воздуха МРВ (MAF) от датчика 122 массового расхода воздуха; температуры хладагента двигателя ТХД (ЕСТ) от датчика 116 температуры, присоединенного к охлаждающей рубашке 118; сигнал профиля зажигания СПЗ (PIP) от датчика 120 Холла (или другого типа), соединенного с коленчатым валом 140; положение дросселя ПД (TP) от датчика положения дросселя; сигнал абсолютного давления в коллекторе АДК (MAP) от датчика 124. Сигнал частоты вращения двигателя ЧВД (RPM) может быть сгенерирован контроллером 12 по сигналу СПЗ. Сигнал давления в коллекторе АДК от датчика давления в коллекторе могут использовать для определения разрежения или избыточного давления во впускном коллекторе.
Микросхема 111 постоянного запоминающего устройства может быть запрограммирована с использованием машиночитаемых данных, представляющих собой выполняемые процессором 106 инструкции для осуществления раскрытых ниже способов, а также другие вариантов, подразумеваемых, но явным образом не перечисленных. Примеры программ, которые могут быть выполнены контроллером, показаны на фиг. 3 и 4. Контроллер 12 имеет возможность получать сигналы от различных датчиков, показанных на фиг. 1, и использовать различные приводы, показанные на фиг. 1, для регулирования работы двигателя, на основе полученных сигналов и инструкций, сохраненных в памяти контроллера 12.
Система 100 автомобиля содержит прицеп 120, присоединенный к задней части автомобиля 110 посредством сцепки 79. Несколько датчиков и/или камер (не показанных на схеме) могут быть присоединены к сцепке 79 для определения наличия прицепа. Прицепы могут иметь различные размеры (например, прицеп может быть маленький или большой по габаритам), различные веса (например, тяжелый или легкий) и иметь различные размеры лобовой части (например, маленькая лобовая часть или большая лобовая часть).
В изображенном примере прицеп 120 содержит пару колес 77 и пару тормозов 80, которые, как показано, должны присутствовать в прицепе 120. В альтернативных вариантах реализации прицеп может содержать любое количество осей/колес и тормозов. Тормозная система имеет возможность непосредственно обмениваться данными (посылать и принимать сигналы) с контроллером 12 двигателя. Тормозами автомобиля и тормозами прицепа можно управлять отдельно, независимо, согласованно, одновременно, взаимозависимо или некоторым другим способом в зависимости от условий работы автомобиля. Прицеп 120 может содержать задние фары 82 и другие световые устройства. Электрическая система прицепа может быть также соединена с электрической системой автомобиля 110 через контроллер двигателя 12. В альтернативных вариантах реализации связь между прицепом и системой автомобиля может быть беспроводной, для чего и автомобиль, и прицеп могут содержать приемопередатчики (не показанные на схеме) для осуществления такой связи.
Система 100 автомобиля также содержит навигационную систему 154, размещенную в автомобиле 110. Навигационная система 154 имеет возможность обмена данными с системой управления 12 двигателя 10 и может быть выполнена с возможностью определять местоположение (например, координаты GPS автомобиля) системы 100 автомобиля в любой момент времени. Водитель может также использовать навигационную систему 154 для направления автомобиля к месту назначения. В этом случае навигационная система может предоставлять подробности относительно вариантов маршрута, а также сообщать данные о дороге и погоде для каждого маршрута движения. Например, система управления может получать информацию о дорожном градиенте дорожного сегмента, по которому двигается автомобиль (в настоящее время), а также информацией о дорожном градиенте для дорожного сегмента, по которому будет двигаться автомобиль. Кроме того, информация о дорожном градиенте для всего маршрута движения автомобиля может быть получена и сохранена в памяти контроллера как внешняя карта маршрута. Навигационная система может осуществлять обмен данными с находящимся вне автомобиля (внешним) сервером и/или сетевым облачным хранилищем 153 посредством беспроводной связи 150. Как раскрыто здесь, навигационная система 154 имеет возможность определять текущее местоположение системы 100 автомобиля и получать информацию о дорожном градиенте из сетевого облачного хранилища 153 для определения характеристик прицепа 120.
Кроме того, система 100 автомобиля содержит устройство 155 беспроводной связи, размещенное в автомобиле 110. Система управления, то есть контроллер 12, также имеет возможность связи с устройством 155 беспроводной связи для непосредственного обмена данными автомобиля 110 с сетевым облачным хранилищем 153 (внешним сервером). Устройство 155 беспроводной связи может также использоваться для обмена данными с другими подобными автомобилями посредством технологии автомобиль-автомобиль (V2V). Указанные автомобили могут быть частью общего парка автомобилей, автомобилями аналогичного производителя и/или аналогичной модели, а также автомобилями, эксплуатируемыми в пределах порогового значения радиуса для заданного автомобиля, или комбинацией этих вариантов. Используя устройство 155 беспроводной связи и/или технологию V2V, автомобиль 110 может непосредственно получать информацию о дорожном градиенте от внешнего сервера или других подобных автомобилей и сохранять полученную информацию на борту автомобиля 110.
Также, для оптимизации условий работы автомобиля, возможно, должны быть точно определены различные характеристики прицепа 120. Например, для заданного прицепа, в зависимости от его размера, веса, и в особенности от размера его лобовой части, ощущения при вождении системы автомобиля могут изменяться, и рабочие параметры двигателя, возможно, должны быть отрегулированы для улучшения производительности автомобиля и повышения топливной экономичности. Подробности относительно определения дорожного градиента и классификации прицепов будут раскрыты с использованием фиг. 3 и 4.
Значение разности между оценкой дорожного градиента, выполненной в режиме реального времени, и оценкой ожидаемого дорожного градиента во время различных условий работы автомобиля могут использовать для определения одной или нескольких характеристик прицепа. Оценка дорожного градиента в режиме реального времени может быть выполнена контроллером трансмиссии, на основе ответного крутящего момента колес в системе автомобиля при различных условиях движения (например, во время ускорения, замедления, поддержания равномерной скорости и т.д.). Например, за счет наличия электрического оборудования в трансмиссии гибридного электромобиля ГЭМ (HEV), точную оценку дорожного градиента в режиме реального времени могут выполнить при помощи контроллера автомобиля ГЭМ.
Кроме того, полученные характеристики прицепа могут изменяться в зависимости от условий работы автомобиля, при которых была выполнена оценка дорожного градиента в режиме реального времени. Например, получение характеристик прицепа может содержать, во время установившегося движения автомобиля, определение размера прицепа на основе разности между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, причем значение размера увеличивают, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент. В качестве другого примера, получение характеристик прицепа может содержать, во время ускорения автомобиля, определение веса прицепа на основе разности между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, причем значение веса увеличивают, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент. В качестве другого примера, получение характеристик прицепа может содержать, во время замедления автомобиля, определение размера лобовой части прицепа, на основе первого изменения дорожного градиента, определяемого в режиме реального времени, относительно второго изменения ожидаемого дорожного градиента, причем значение размера лобовой части увеличивают, если первое изменение превышает второе изменение.
Пример вариантов реализации прицепов, имеющих различные характеристики (размер, вес, размер лобовой части), показан на фиг. 2А, 2В, 2С и 2D, а способы различения таких прицепов (на основе оценок дорожных градиентов) раскрыты с использованием фиг. 3 и 4.
Как указано здесь, размер прицепа может представлять собой габариты (высоту, ширину и глубину) и/или объем прицепа, вычисляемый посредством функции этих габаритов. Прицеп могут классифицировать как имеющий меньший или больший размер, в зависимости от габаритных параметров прицепа и размера автомобиля, буксирующего прицеп. Например, прицеп, имеющий длину, превышающую пороговое значение длины, могут классифицировать как большой, в то время как прицеп, имеющий меньшую длину, чем пороговое значение длины, могут классифицировать как маленький. В качестве другого примера, прицеп, имеющий высоту, превышающую пороговое значение высоты, могут классифицировать как большой, в то время как прицеп, имеющий меньшую высоту, чем пороговое значение высоты, могут классифицировать как маленький. В качестве другого примера, прицеп, имеющий объем, превышающий пороговое значение объема, могут классифицировать как большой, в то время как прицеп, имеющий меньший объем, чем пороговое значение объема, могут классифицировать как маленький. Пороговые значения длины, высоты и объема могут зависеть от производителя, модели и категории автомобиля (например, седан, грузовик-пикап, коммерческий тягач и т.д.), буксирующего прицеп. Соответствующие пороговые значения могут быть определены как процент длины, высоты и объема буксирующего автомобиля. Как раскрыто здесь, вес прицепа можно соотнести с массой прицепа. Масса прицепа может содержать массу груза, перевозимого прицепом. На основе веса прицепа и категории автомобиля, буксирующего прицеп, прицеп можно классифицировать как легкий или тяжелый. Например, для гибридного пассажирского автомобиля, вес «легкого» прицепа, присоединенного к автомобилю, может равняться приблизительно 400 фунтов (10% собственного веса автомобиля), в то время как вес «тяжелого» прицепа, присоединенного к автомобилю, может равняться приблизительно 1000 фунтов (25% собственного веса автомобиля). Для мощного грузовика-пикапа вес «легкого» прицепа, присоединенного к грузовику-пикапу, может равняться приблизительно 6000 фунтов (100% собственного веса автомобиля), в то время как вес «тяжелого» прицепа, присоединенного к грузовику-пикапу, может равняться приблизительно 18000 фунтов (300% собственного веса автомобиля). Для некоторых коммерческих тягачей вес «легкого» прицепа, присоединенного к тягачу, может равняться приблизительно 200% собственного веса автомобиля, в то время как вес «тяжелого» прицепа, присоединенного к тягачу, может равняться по меньшей мере 800% собственного веса автомобиля.
Как раскрыто здесь, лобовая часть прицепа может быть соотнесена с размером передней плоскости (поверхности) прицепа, в том числе, с проекцией поперечного сечения прицепа на переднюю плоскость, а также форму проекции на переднюю плоскость. Например, прицеп может иметь меньшую лобовую часть, причем размеры передней поверхности прицепа меньше, чем габаритные размеры (высота, ширина и глубина) прицепа. Для сравнения, в прицепе, имеющем более крупную лобовую часть, передняя поверхность прицепа больше по сравнению с габаритным размером прицепа. Дополнительно или в качестве альтернативы, размер лобовой части может представлять собой абсолютный размер, выраженный в квадратных метрах. Например, прицеп с размером передней плоскости, превышающим пороговое значение размера, могут классифицировать как прицеп, имеющий большую лобовую часть. Пороговый размер лобовой части может зависеть от габаритного размера прицепа и также от производителя, модели и категории автомобиля (например, седан, грузовик-пикап, коммерческий тягач и т.д.), буксирующего прицеп. Пороговое значение могут определить как процент от габаритного размера прицепа или аналогичного размера буксирующего автомобиля. Размер лобовой части могут также классифицировать как процент от передней плоскости прицепа, расположенной выше высоты буксирующего автомобиля.
Размер лобовой части прицепа может влиять на параметр аэродинамического сопротивления или коэффициент сопротивления для прицепа.
Кроме того, прицеп может иметь любой размер, вес и размер лобовой части, причем эти характеристики могут зависеть друг от друга, а могут не зависеть друг от друга. Например, меньший размер может коррелировать с более легким весом и большой лобовой частью. В другом примере, больший размер может коррелировать с более тяжелым весом и меньшей лобовой частью. Однако в других примерах прицеп меньшего размера может быть тяжелым и может иметь меньшую лобовую часть, в то время как прицеп большего размера может быть легким и иметь более крупную лобовую часть.
Система 100 автомобиля изображает в качестве примера автомобиль 110 с присоединенным прицепом 120, и компоненты системы автомобиля, раскрытые здесь, не ограничены какой-либо конкретной системой автомобиля. Изображенный автомобиль 110 может представлять собой гибридный пассажирский автомобиль, седан, автомобиль повышенной проходимости АПП (SUV), грузовик-пикап или коммерческий буксирный грузовик. Кроме того, присоединенный прицеп 120 может иметь любой размер, вес и размер лобовой части. На фиг. 2А показан первый пример варианта реализации 200 прицепа 204, присоединенного к автомобилю 202. В этом примере прицеп 204 может быть легким прицепом, причем вес прицепа меньше порогового значения веса. Например, прицеп может быть классифицирован как легкий, если вес прицепа меньше порогового значения процента от собственного веса автомобиля 202, буксирующего прицеп. Кроме того, лобовая часть изображенного прицепа 204 может быть маленькой.
На фиг. 2В показан второй пример варианта реализации 210 прицепа 214, присоединенного к автомобилю 202. В этом примере прицеп 214 является легким прицепом, причем вес прицепа меньше порогового значения веса. В этом примере легкий прицеп 214 имеет большую лобовую часть. Габариты (размеры) прицепа 214 могут быть больше габаритов прицепа 204, показанного на фиг. 2А.
На фиг. 2С показан третий пример варианта реализации 230 прицепа 234, присоединенного к автомобилю 202. В этом примере прицеп 234 может быть тяжелым прицепом, причем вес прицепа больше порогового значения веса. Например, прицеп может быть классифицирован как тяжелый, если вес прицепа превышает пороговое значение процента от собственного веса автомобиля 202, буксирующего прицеп. Вес прицепа 234 может быть больше, чем вес прицепов 204 и 214, показанных на фиг. 2А и 2В соответственно. Кроме того, прицеп 234 может иметь маленькую лобовую часть. Габариты (размеры) прицепа 234 могут быть больше по сравнению с габаритами прицепа 204, показанного на фиг. 2А, и по сравнению с габаритами прицепа 214, показанного на фиг. 2В.
На фиг. 2D показан четвертый пример варианта реализации 240 прицепа 244, присоединенного к автомобилю 202. В этом примере прицеп 244 может быть тяжелым прицепом, причем вес прицепа больше порогового значения веса. Вес прицепа 244 может быть подобным весу прицепа 234, показанного на фиг. 2С, и может быть больше веса прицепов 204 и 214, показанных на фиг. 2А и 2В соответственно. Прицеп 244 может иметь большую лобовую часть по сравнению с прицепом 234, показанным на фиг. 2С. Таким образом, прицепы могут иметь различные характеристики, в том числе, могут отличаться габариты, вес и размер лобовой части прицепов. Габариты (размер) прицепа 244 могут быть больше по сравнению с габаритами прицепа 204, показанного на фиг. 2А, прицепа 214, показанного на фиг. 2В, и прицепа 234, показанного на фиг. 2С.
Также, в зависимости от веса, размера и размера лобовой части прицепа, силы контакта колес, созданные на колесах автомобиля, буксирующего прицеп, могут изменяться. Как раскрыто здесь, прицепы 204, 214, 234 и 244, имеющие различные характеристики, могут быть классифицированы на основе оценки дорожного градиента, выполненной в режиме реального времени, и сравнения с ожидаемым дорожным градиентом. Информацию о дорожном градиенте, полученную в режиме реального времени (оценку дорожного градиента на основе сил контакта колес буксирующего автомобиля) наряду с ожидаемой дорожной информацией о градиенте (в том числе, информацией из внешних или бортовых карт) для дорожного сегмента, по которому автомобиль движется в настоящий момент, могут использовать для достоверного определения заданных характеристик прицепа, в том числе, данных о размере, весе и размере лобовой части прицепа. Получение этих данных содержит оценку первой массы автомобиля, на основе дорожного градиента, определяемого в режиме реального времени, оценку второй массы автомобиля, на основе ожидаемого дорожного градиента, и выявление одной или нескольких характеристик прицепа, на основе сравнения первой массы автомобиля и второй массы автомобиля, где одна или несколько характеристик содержат размер прицепа, вес прицепа и размер лобовой части прицепа. На основе полученных характеристик прицепа, во время движения автомобиля, характеристики двигателя могут оптимизировать для определенного типа прицепа, что улучшает ощущения при вождении, управление температурой трансмиссии и повышает топливную экономичность. Пример способов классификации таких прицепов подробно раскрыт с использованием фиг. 3 и 4.
На фиг. 1 и 2A-2D показаны примеры прицепа и системы автомобиля с относительным расположением различных компонентов. Если показано, что эти компоненты непосредственно соприкасаются друг с другом или непосредственно соединены, то такие элементы могут упоминаться как находящиеся в прямом контакте или непосредственно соединенные, соответственно, в качестве примера. Точно так же элементы, показанные близлежащими или смежными, могут быть близлежащими или смежными соответственно, только в качестве примера. В качестве примера, компоненты, находящиеся в контакте друг с другом, могут упоминаться как контактирующие. В качестве другого примера, элементы, расположенные отдельно друг от друга, зазором между ними и без каких-либо других компонентов, могут быть упомянуты как таковые, только в качестве примера. Таким образом, система, показанная на фиг. 1 и 2A-2D, содержит автомобиль с двигателем, трансмиссию с несколькими комплектами шестерен, причем трансмиссия имеет возможность соединять двигатель с колесами автомобиля, прицеп, присоединенный к автомобилю; навигационную систему, информационно связанную с автомобилем и внешним сервером; и контроллер. Контроллер может быть выполнен с машиночитаемыми инструкциями, сохраненными в долговременной памяти для следующего: во время движения автомобиля по дорожному сегменту, оценка дорожного градиента, в режиме реального времени, на основе одного или нескольких параметров, в числе которых крутящий момент двигателя, крутящий момент трансмиссии и передаточное отношение, сравнение значения дорожного градиента, определяемого в режиме реального времени, со значением ожидаемого дорожного градиента, полученным через навигационную систему, выявление одной или нескольких характеристик прицепа на основе указанного сравнения и регулирование графика переключения передач на основе выявленных характеристик. Ожидаемый дорожный градиент может представлять собой первую внешнюю оценку ожидаемого дорожного градиента. Контроллер автомобиля может затем обновить бортовую оценку ожидаемого дорожного градиента на основе значения дорожного градиента, определенного в режиме реального времени, и коэффициента достоверности бортовой оценки ожидаемого дорожного градиента, на основе нескольких законченных поездок по данному дорожному сегменту.
Фиг. 3 иллюстрирует пример способа 300, который может быть осуществлен для определения дорожного градиента дорожного сегмента, на основе сил контакта колес автомобиля, и дальнейшего определении характеристик прицепа, буксируемого автомобилем. Указанный способ позволяет оптимизировать производительность буксирующего автомобиля. Инструкции для выполнения способа 300 и других содержащихся здесь способов могут быть выполнены контроллером, на основе инструкций, сохраненных в памяти контроллера и совместно с сигналами, полученными от датчиков системы двигателя, таких как датчики, раскрытые выше в отношении фиг. 1. Контроллер может использовать приводы двигателя из системы двигателя, чтобы регулировать работу двигателя согласно раскрытым ниже способам.
На шаге 302 могут в режиме реального времени определить значение градиента дорожного сегмента, по которому движется автомобиль, на основе оценки сил контакта колес. Информация о дорожном градиенте может содержать данные о профиле уклонов дороги, например, о количестве подъемов, спусков и ровных участков, об их длинах, а также об оценках времени, которое требуется для движения по ним. Для того чтобы определить значение дорожного градиента в режиме реального времени, текущий крутящий момент колес могут оценить при помощи контроллера трансмиссии, на основе одного или нескольких параметров, среди которых оценки крутящего момента двигателя, крутящего момента трансмиссии и передаточного отношения, которые могут преобразовать в оценку крутящего момента первичного источника движущей силы (например, двигателя, электромотора или их комбинации), передаваемого через кинематическую цепь, в крутящий момент одного или нескольких ведущих колес. Контроллер трансмиссии может затем измерить реакцию автомобиля во время текущих условий движения автомобиля (например, во время ускорения/замедления, установившейся скорости и т.д.). Затем измеренную реакцию автомобиля (во время некоторых условий движения) сравнивают с ожидаемой реакцией автомобиля для данного (текущего) вырабатываемого крутящего момента колес. Затем разность между ожидаемой и измеренной реакцией автомобиля используют для оценки дорожного градиента в режиме реального времени для конкретного дорожного сегмента. В том случае, когда прицеп присоединен к автомобилю, силы контакта колес автомобиля могут изменяться в результате наличия буксируемого прицепа, а также в зависимости от его размера, веса и размера лобовой части прицепа.
На шаге 304 программа определяет, содержит ли бортовая карта информацию о дорожном градиенте, доступную для текущего дорожного сегмента (то есть, сегмента дороги, по которому в настоящее время движется автомобиль). Бортовая карта может представлять собой карту, хранимую в памяти контроллера автомобиля и содержащую данные, относящиеся к дорожным условиям. Бортовая карта может содержать подробности, относящиеся к выбранному маршруту, например, дорожные условия, дорожные градиенты и т.д. Например, бортовую карту часто используемого дорожного сегмента могут создать, обновить и сохранить в памяти контроллера. В другом примере карту могут получить из внешних источников и сохранить в памяти контроллера для будущего использования в качестве бортовой карты. Такие бортовые карты могут использовать для навигации и/или определения дорожного градиента дорожного сегмента. На основе определения дорожного градиента, могут оценить характеристики прицепа, присоединенного к автомобилю, особенно во время отсутствия надежной внешней карты (то есть, карты, полученной из внешнего по отношению к автомобилю источника, посредством навигационной системы, беспроводной связи с облачным хранилищем данных, средства связи автомобиль-автомобиль и т.д.).
Если на шаге 306 определено, что бортовая карта для текущего дорожного сегмента не доступна, то могут, факультативно, создать новую бортовую карту для текущего дорожного сегмента, если собраны достаточные данные во время движения по текущему дорожному сегменту. Информацию о дорожном градиенте (как определяют по значению сил контакта колес на шаге 302) для текущего дорожного сегмента могут добавить в бортовую карту для дальнейшего использования.
Если на шаге 304 определено, что бортовая карта для текущего дорожного сегмента доступна, то на шаге 308 могут обновить бортовую карту. Обновление бортовой карты, на шаге 309, содержит использование дорожной информации о градиенте, определяемом в режиме реального времени, как оценки, выполненной на основе значений сил контакта колес, используемой для обновления информации об усредненном дорожном градиенте для данного дорожного сегмента, как сохранено в бортовой карте. Обновление бортовой карты дополнительно содержит, на шаге 310, обновление коэффициента доверия для данной бортовой карты. Кроме того, данные о градиенте могут загрузить на внешний сервер в режиме реального времени, и данные об ожидаемом дорожном градиента могут обновить на основе градиента, полученного в режиме реального времени. Ожидаемый дорожный градиент содержит информацию о дорожном градиенте дорожного полотна (в том числе, информацию, касающуюся возвышения дороги и наличия плоских участков дороги, подъемов, спусков и т.д.). Информацию об ожидаемом дорожном градиенте могут получить из внешнего источника, такого как навигационная система и/или сетевое облако. Ожидаемый дорожный градиент не зависит от каких-либо факторов, относящихся к системе автомобиля. Как было раскрыто выше, дорожный градиент, определяемый в режиме реального времени, содержит оценку дорожного градиента в виде данных, определенных на основе сил контакта колес автомобиля. На оценку дорожного градиента в режиме реального времени могут повлиять характеристики прицепа (размер прицепа, вес прицепа, размер лобовой части прицепа), присоединенного к автомобилю. Поэтому, на основе характеристик прицепа могут определить разность между градиентом, полученным в режиме реального времени, и ожидаемым дорожным градиентом.
Для недавно созданной бортовой карты коэффициент доверия карты может быть низким, поскольку информация, полученная во время одной поездки, может не быть полностью представительной для ожидаемых дорожных условий. Это происходит из-за изменений в ожидаемых значениях сил контакта колес, основанных на таких факторах, как наличие прицепа, присоединенного к автомобилю (что влияет на силы контакта колес автомобиля), и/или изменения дорожных условий (таких как карта, обновляемая для временных дорожных условий, например, во время дорожных ремонтных работ). Каждый раз при движении автомобиля по тому же самому дорожному сегменту, могут собрать новый набор данных, в том числе, информацию о дорожном градиенте, и бортовую карту могут обновить на основе нового набора данных. Например, информацию о дорожном градиенте, хранимую в бортовой карте, могут основывать на статистическом среднем значении для измерений, собранных в каждом доступном наборе данных. Также, при увеличении количества наборов данных, доступных для обновления дорожного градиента, коэффициент доверия бортовой карты (для данного дорожного сегмента) также увеличивают. Как только коэффициент доверия начинает превышать некоторый пороговый уровень, бортовую карту могут использовать совместно или вместо внешней (полученный извне) карты для получения информации о дорожном градиенте дорожного сегмента. В качестве альтернативы могут использовать взвешенное среднее число параметров, полученных из бортовой карты и внешней карты, для определения информации о дорожном градиенте и характеристик прицепа.
На шаге 311 программа определяет, доступны ли для текущего дорожного сегмента навигационные данные, имеющие отношение к дорожному градиенту. На этом шаге определяют, можно ли получить навигационные данные, в том числе, информацию о дорожном градиенте, из одного или нескольких источников, внешних по отношению к автомобилю. Навигационные данные, имеющие отношение к дорожному градиенту, содержат информацию о ровных участках дороги, подъемах, спусках, о длине таких участков дороги и о предполагаемом времени проезда по дороге с таким рельефом. Один или несколько источников, внешних по отношению к автомобилю, могут содержать систему глобального позиционирования (GPS) и сетевое облачное хранилище или сервер (например, сетевое облачное хранилище 153, показанное на фиг. 1). Например, могут определить, возможно ли получить информацию о дорожном градиенте для текущего дорожного сегмента посредством беспроводной связи с внешним сервером. Дополнительно или факультативно, могут определить, возможно ли получить информацию о дорожном градиенте для текущего дорожного сегмента при помощи устройства беспроводной связи автомобиля (такого как устройство 155 беспроводной связи, показанное на фиг. 1) имеющего возможность обмена данными с другими подобными автомобилями посредством технологии автомобиль-автомобиль (V2V). Указанные автомобили могут быть частью общего парка автомобилей, автомобилями аналогичного производства и/или аналогичной модели, а также автомобилями, эксплуатируемыми в пределах порогового значения радиуса для заданного автомобиля, или комбинацией этих вариантов.
Если определено, что навигационные данные доступны для текущего дорожного сегмента, то на шаге 320 могут получить или принять из внешнего источника данных посредством навигационной системы (например, при помощи координат системы глобального позиционирования (GPS) автомобиля) карту ожидаемого дорожного градиента (внешнюю карту) для текущего дорожного сегмента, а также для одного или нескольких будущих дорожных сегментов (например, для всего маршрута движения автомобиля). Например, данные об ожидаемом дорожном градиенте получают от бортовой навигационной системы автомобиля, причем навигационная система соединена с возможностью обмена данными с системой управления автомобилем. Навигационная система может также иметь возможность обмена данными с внешним сервером, причем данные об ожидаемом дорожном градиенте загружают в автомобиль с внешнего сервера через навигационную систему. В других примерах контроллер автомобиля может непосредственно получать информацию о дорожном градиенте от других внешних серверов посредством беспроводной технологии. Кроме того, автомобиль может использовать устройство беспроводной связи автомобиля для получения информации о дорожном градиенте от подобных автомобилей (работающих в пределах некоторого радиуса) посредством технологии V2V.
Если на шаге 311 определено, что навигационные данные не доступны для получения текущей информации о дорожном градиенте, то на шаге 312 программа определяет, высок ли коэффициент доверия бортовой карты. Если определено, что коэффициент доверия выше порогового уровня коэффициента доверия, то бортовую карту могут использовать. В этом случае, на шаге 314 получают информацию об ожидаемом дорожном градиенте из бортовой карты. Эта информация основана на усредненных данных о дорожном градиенте, посредством оценки с использованием нескольких наборов данных, полученных в результате нескольких поездок по тому же самому дорожному сегменту.
На шаге 322 могут сравнить дорожный градиент, определяемый в режиме реального времени (полученный на шаге 302), с ожидаемым дорожным градиентом, полученным от любой внешней карты (на шаге 320) или от бортовой карты (на шаге 314). На основе сравнения дорожного градиента, определяемого в режиме реального времени, и ожидаемого дорожного градиента, на шаге 324 могут определить характеристики присоединенного к автомобилю прицепа (если прицеп присутствует). Этот шаг содержит определение наличия прицепа, и, если прицеп присоединен, определение одного или нескольких размеров прицепа (габаритов или объема прицепа), веса прицепа (массы прицепа) и размера лобовой части (размера лобовой плоскости) прицепа. Также, для прицепа, в зависимости от размера, веса и размера лобовой части, могут измениться силы контакта колес в системе буксирующего автомобиля. Силы контакта колес в буксирующем автомобиле могут также изменяться в зависимости от скорости автомобиля и мгновенных дорожных условий. За счет изменения сил контакта колес могут появиться существенные различия между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом. Эти различия могут использовать для определения характеристик присоединенного прицепа. Подробности определения характеристик прицепа раскрыты с использованием фиг. 4.
На основе полученных характеристик прицепа, на шаге 326 могут регулировать рабочие параметры двигателя для оптимизации характеристик двигателя системы автомобиля и прицепа. Могут регулировать несколько средств управления трансмиссией в зависимости от типа буксируемого прицепа. В качестве не ограничивающих примеров, регулируемые параметры работы автомобиля могут включать один или более из следующего: график переключения передач в трансмиссии, потребление топлива двигателем и управление стабильностью автомобиля и его поперечным смещением. Например, график переключения передач могут адаптировать к увеличенному весу системы автомобиля и прицепа. Регулирование графика переключения передач содержит более длительное удержание текущей передачи и задержку переключения передачи (например, оставление более низкой передачи на более длительный период времени и задержку переключения на более высокую передачу), что предотвращает слишком частый выбор более высокой или более низкой передачи трансмиссии (явление, известное, как работа рывками). В другом примере, при наличии оценки характеристик прицепа и данных о маршруте движения автомобиля, можно заранее более качественно оценить расход топлива в поездке и предоставить водителю информацию относительно доступности топлива (например, расстояние пробега для каждого вида топлива в топливном баке). Кроме того, могут улучшить управление температурой трансмиссии и качеством выбрасываемых отработавших газов. Например, при ожидании перегрева двигателя и детонации во время буксирования прицепа на протяженном подъеме или при низкой влажности окружающей среды, большее количество топлива могут подавать в двигатель посредством прямого впрыска. За счет определения размера лобовой части прицепа могут улучшить оценку мощности, производимой автомобилем для буксирования прицепа на различных скоростях автомобиля. Кроме того, на основе полученных характеристик прицепа могут регулировать фазы кулачкового распределения в двигателе, максимальную скорость автомобиля, упреждающую регулировку переключения передач на основе скорости, действия по охлаждению трансмиссии, оценку использования жидкости для очистки дизельных отработавших газов, оценку интервала замены машинного масла и индикатор ручного переключения передач для водителя. Кроме того, для гибридных электромобилей, полученные характеристики присоединенного прицепа могут повлиять на следующие параметры: график заряда или разряда батареи высокого напряжения, требование включения или выключения двигателя, оценка емкости подключенной батареи высокого напряжения.
Таким образом, оценку усредненного дорожного градиента для дорожного сегмента, выполняемую на борту автомобиля, могут выполнить на основе сил контакта колес во время движения автомобиля, и коэффициент доверия для оценки усредненного дорожного градиента могут увеличить при увеличении количества поездок по данному дорожному сегменту. Если коэффициент доверия превышает некоторое пороговое значение, то характеристики прицепа, присоединенного к автомобилю, могут определить на основе указанной оценки усредненного дорожного градиента, и работу автомобиля могут регулировать в зависимости от характеристик прицепа, для лучшего учета требований к буксировке.
Фиг. 4 иллюстрирует пример способа 400, позволяющего выявить характеристики прицепа (размер, вес, размер лобовой части) на основе сравнения оценки дорожного градиента, выполненной в режиме реального времени, с полученным извне ожидаемым дорожным градиентом. Система автомобиля может содержать автомобиль с присоединенным прицепом. Прицеп может иметь маленький или большой размер, причем размер прицепа может представлять собой габариты или объем прицепа. Точно так же прицеп может быть классифицирован как легкий или тяжелый прицеп, причем вес прицепа может представлять собой массу или нагрузку прицепа. Кроме того, размер лобовой части прицепа может изменяться в зависимости от размера лобовой плоскости прицепа. Прицеп может иметь маленькую или большую лобовую часть.
На шаге 402 могут определить текущие условия движения системы автомобиля, в том числе, информацию о дорожном градиенте в режиме реального времени для соответствующего дорожного сегмента. Как показано на фиг. 3, дорожный градиент, определяемый в режиме реального времени, могут оценить на основе сил контакта колес системы автомобиля во время различных условий движения (например, во время движения на установившейся скорости и во время событий ускорения/замедления). Для получения значения дорожного градиента, определяемого в режиме реального времени, текущий крутящий момент колес может быть оценен контроллером трансмиссии, на основе одного или более из следующего: крутящий момент двигателя, крутящий момент трансмиссии и оценки передаточных отношений. Затем контроллер трансмиссии может измерить реакцию автомобиля во время текущих условий движения автомобиля. Затем измеренную реакцию автомобиля могут сравнить с ожидаемой реакцией автомобиля для данного (текущего) крутящего момента, производимого колесами. Затем разность между ожидаемой и измеренной реакцией автомобиля могут использовать для оценки дорожного градиента, определяемого в режиме реального времени, для соответствующего дорожного сегмента. Кроме того, ожидаемые дорожные условия, содержащие информацию об ожидаемом дорожном градиенте, могут получить из внешней карты (посредством навигационной системы, беспроводной связи и/или технологии автомобиль-автомобиль) и/или из бортовой карты. Как раскрыто выше для фиг. 3, в случае использования бортовой карты, выработка оценки усредненного дорожного градиента содержит определение оценки дорожного градиента в режиме реального времени в каждой поездке из числа нескольких поездок по некоторому дорожному сегменту (каждая поездка содержит движение по тому же самому дорожному сегменту) и вычисление статистического среднего значения для каждой оценки дорожного градиента, определяемого в режиме реального времени. В том случае, когда значение коэффициента доверия меньше некоторого порогового значения, оценку ожидаемого дорожного градиента могут получить от внешнего сервера. Тогда, в такой поездке (по тому же самому дорожному сегменту), характеристики прицепа могут определить на основе усредненной оценки дорожного градиента относительно оценки дорожного градиента, выполненной в режиме реального времени.
На шаге 404, во время периода движения, когда автомобиль работает на установившейся скорости, могут определить разность (разность_1) между градиентом, оцененном в режиме реального времени (оцененном контроллером автомобиля), и ожидаемым дорожным градиентом. Любое различие между градиентом, оцененном в режиме реального времени, и ожидаемым дорожным градиентом могут соотнести с наличием прицепа, причем различие может изменяться в зависимости от одного или нескольких параметров: размера, веса и размера лобовой части присоединенного к автомобилю прицепа (буксируемого). Если автомобиль не буксирует прицеп, дорожный градиент, определенный в режиме реального времени, может быть, по существу, равен ожидаемому дорожному градиенту.
На шаге 406 программа определяет, больше ли значение разность_1, чем первое пороговое значение (порог_1). Первое пороговое значение может представлять собой предел погрешности при определении дорожного градиента в режиме реального времени. Если оценка дорожного градиента, определяемого в режиме реального времени, существенно отличается от ожидаемого дорожного градиента, то значение разность_1 может быть больше предела погрешности. Если определено, что значение разность_1 меньше порогового значения, то на шаге 408 могут подтвердить, что дорожный градиент, определенный в режиме реального времени, не отличается по существу от ожидаемого дорожного градиента, и поэтому могут сделать вывод, что прицеп не присоединен к автомобилю. Контроллер автомобиля может определить, что текущий вес автомобиля не содержит дополнительный вес прицепа, который мог бы влиять на значения сил контакта колес, поскольку эти значения используют для оценки дорожного градиента в режиме реального времени. На шаге 410 могут регулировать рабочие параметры двигателя на основе характеристик автомобиля по умолчанию. В это время какие-либо дополнительные регулировки, обусловленные наличием прицепа, не являются необходимыми.
Если на шаге 406 определено, что значение разность_1 больше значения порог_1, то на шаге 412 могут сделать вывод, что дорожный градиент, определенный в режиме реального времени, отличается от ожидаемого дорожного градиента, и поэтому прицеп, возможно, присоединен к автомобилю. Размер прицепа могут определить по значению разность_1, а также профилю скорости автомобиля во время условий, существующих при оценке дорожного градиента в режиме реального времени. Если значение разность_1 больше второго порогового значения, то могут сделать вывод, что прицеп представляет собой большой прицеп (большого размера, габаритов или объема). Точно так же, если значение разность_1 меньше второго порогового значения, то могут сделать вывод, что прицеп представляет собой маленький прицеп (маленького размера, габаритов или объема). Второе пороговое значение могут основывать на характеристиках автомобиля, например, производителе, модели и категории автомобиля, буксирующего прицеп. Когда подтверждено, что прицеп присоединен к автомобилю, и размер прицепа определен, контроллер может продолжить далее определять одну или несколько других характеристик прицепа (например, вес, размер лобовой части и т.д.).
На шаге 414 значение дорожного градиента, определенного в режиме реального времени, могут оценить на основе сил контакта колес во время каждого периода работы системы автомобиля на низкой скорости и высокой скорости. Низкая скорость и высокая скорость могут соответствовать двум заранее заданным значениям скорости (или диапазонам скорости). В то же время информацию об ожидаемом дорожном градиенте могут получить или из внешней карты, или из бортовой карты, для текущего дорожного сегмента. На шаге 416 могут вычислить разность между дорожным градиентом, определенном в режиме реального времени, и ожидаемым дорожным градиентом. Вычисление разности между дорожным градиентом, определенном в режиме реального времени, и ожидаемым дорожным градиентом содержит, на шаге 418, определение первой разности (разность_нс) между дорожным градиентом, определенном в режиме реального времени, и ожидаемым дорожным градиентом, оцененными во время движения системы автомобиля на низкой скорости. Кроме того, вычисление разности, на шаге 420, может дополнительно содержать определение второй разности (разность_вс) между дорожным градиентом, определенном в режиме реального времени, и ожидаемым дорожным градиентом, оцененными во время движения системы автомобиля на высокой скорости. Поскольку аэродинамическое сопротивление пропорционально размеру лобовой части прицепа и квадрату скорости системы автомобиля, прицеп (соединенный с автомобилем) с более крупной лобовой частью может создавать большее аэродинамическое сопротивление во время движения на высокой скорости, по сравнению с прицепом, имеющим меньшую лобовую часть. Посредством сравнения значения разность_нс (оцененного во время движения на низкой скорости) и значения разность_нс (оцененного во время движения на высокой скорости), могут определить, имеет ли присоединенный к автомобилю прицеп маленькую или большую лобовую часть.
На шаге 422 могут сравнить две полученные разности между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом (разность_нс и разность_вс), вычисленные при низкой скорости и высокой скорости работы автомобиля соответственно. Если прицеп, присоединенный к автомобилю, имеет маленькую лобовую часть, то разность между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом не может существенно измениться для низкой скорости и высокой скорости, из-за малого аэродинамического сопротивления. Поэтому, если определено, что нет какой-либо значительной разности между значениями разность_нс и разность_вс (например, разность между значениями разность_нс и разность_вс меньше порогового значения разности), то могут сделать вывод, что лобовая часть присоединенного к автомобилю прицепа маленькая. Если прицеп, присоединенный к автомобилю, имеет большую лобовую часть, разность между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом может значительно измениться для низкой скорости и высокой скорости из-за высокого аэродинамического сопротивления. Если определено, что существует значительная разность между значениями разность_нс и разность_вс (например, разность между значениями разность_нс и разность_вс больше порогового значения разности), могут сделать вывод, что лобовая часть присоединенного к автомобилю прицепа большая. Таким образом, на основе разности между значениями дорожного градиента, определяемого в режиме реального времени, и ожидаемого дорожного градиента, оцененными при низкой скорости и при высокой скорости системы автомобиля, можно определить размер лобовой части прицепа.
В альтернативном примере определение размера лобовой части могут выполнить во время событий замедления. Во время замедлений скорость системы автомобиля уменьшается (от высокой до низкой скорости), поэтому разность между значением дорожного градиента, определенным в режиме реального времени, и значением ожидаемого дорожного градиента может измениться за счет изменения аэродинамического сопротивления. Если это изменение больше порогового значения изменения, то могут сделать вывод, что прицеп имеет большую лобовую часть (влияние большего аэродинамического сопротивления), и если изменение меньше порогового значения изменения, то могут сделать вывод, что прицеп имеет маленькую лобовую часть (влияние меньшего аэродинамического сопротивления). Таким образом, размер лобовой части прицепа могут определить на основе первого изменения дорожного градиента, определяемого в режиме реального времени, относительно второго изменения ожидаемого дорожного градиента, во время замедления автомобиля при движении по дорожному сегменту, причем делают вывод, что лобовая часть прицепа большая, если первое изменение превышает второе изменение.
На шаге 424 программа определяет, ускоряется или замедляется система автомобиля в течение некоторого промежутка времени. Разность между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, оцененную во время события ускорения (или замедления) могут использовать для определения габаритов и веса автомобиля. Поскольку инерция прямо пропорциональна весу и размеру корпуса, автомобилю с прицепом, то есть с увеличенным весом и увеличенным размером, может потребоваться больше времени для ускорения на некотором дорожном градиенте, по сравнению с автомобилем, имеющим прицеп с меньшим весом и меньшим размером. Если определено, что система автомобиля в настоящее время не ускоряется или замедляется, то на шаге 426 контроллер может ждать событий ускорения или замедления, чтобы продолжить классификацию прицепа.
Если определено, что система автомобиля ускоряется (или замедляется), то на шаге 428 могут оценить дорожный градиент, определяемый в режиме реального времени, на основе сил контакта колес во время ускорения (или замедления) системы автомобиля. В то же время информацию об ожидаемом дорожном градиенте могут получить или из внешней карты, или из бортовой карты для текущего дорожного сегмента.
На шаге 430 могут определить во время ускорения (или замедления) значение разности (разность_2) между значением дорожного градиента, определенного в режиме реального времени, и значением ожидаемого дорожного градиента.
На шаге 432 программа определяет, больше ли значение разность_2, чем значение порог_2. Значение порог_2 могут изменять в зависимости от веса автомобиля, буксирующего прицеп, и ожидаемого дорожного градиента. Например, значение порог_2 могут основывать на проценте от собственного веса автомобиля, буксирующего прицеп. Используя значение разность_2, могут оценить вес прицепа. Значение веса прицепа прямо пропорционально разности между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом. Другими словами, первую массу автомобиля могут оценить на основе дорожного градиента, определяемого в режиме реального времени, вторую массу автомобиля могут оценить на основе ожидаемого дорожного градиента, а вес прицепа могут выявить на основе сравнения первой массы и второй массы, причем делают вывод, что полученное значение веса увеличилось, если первая масса превышает вторую массу. Если присоединенный к автомобилю прицеп легкий, то, вследствие меньшего значения инерции, разность между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом, полученная во время ускорения (или замедления) может быть меньше по сравнению со значением разности в случае более тяжелого прицепа.
Если определено, что значение разность_2 меньше значения порог_2, то на шаге 434 могут сделать вывод, что к системе автомобиля присоединен легкий прицеп (с маленькой инерцией). Кроме того, на основе значения разность_2, на шаге 435 могут оценить вес прицепа. Если определено, что значение разность_2 больше значения порог_2, то на шаге 436 могут сделать вывод, что к системе автомобиля присоединен тяжелый прицеп (с большой инерцией). Точно так же, на шаге 437 могут оценить вес присоединенного прицепа на основе значения разность_2.
Как раскрыто выше с использованием фиг. 3 (шаг 326), на шаге 438 могут регулировать рабочие параметры двигателя на основе полученных характеристик прицепа, с целью оптимизации характеристик двигателя, топливной экономичности и качества отработавших газов для системы автомобиля и прицепа. Регулирование рабочих параметров двигателя может содержать задержку переключения передач в трансмиссии, если вес прицепа больше, или сохранение более низкой передачи на высоких скоростях автомобиля, если лобовая часть прицепа более крупная. Таким образом, размер прицепа могут выявить на основе разности между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, во время движения автомобиля на установившейся скорости по дорожному сегменту, причем выявленный размер полагают увеличенным, если значение дорожного градиента, определенного в режиме реального времени, превышает значение ожидаемого дорожного градиента. Кроме того, вес прицепа могут выявить на основе разности между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом, во время ускорения автомобиля на дорожном сегменте, причем выявленный вес полагают увеличенным, если значение дорожного градиента, определенного в режиме реального времени, превышает значение ожидаемого дорожного градиента. Кроме того, размер лобовой части прицепа могут выявить на основе первой разности между значением дорожного градиента, определяемого в режиме реального времени, и значением ожидаемого дорожного градиента, во время движения автомобиля на высокой установившейся скорости, относительно второй разности между значением дорожного градиента, определяемого в режиме реального времени, и значением ожидаемого дорожного градиента, во время движения автомобиля на низкой установившейся скорости, причем размер лобовой части полагают увеличенным, если первая разность превышает вторую разность.
На фиг. 5 показан пример 500 определения различия между маленьким и большим прицепом, на основе разности между значением дорожного градиента, определяемого в режиме реального времени, и значением ожидаемого дорожного градиента для дорожного сегмента. Можно сравнить три системы автомобиля, движущиеся на установившейся скорости по дорожному сегменту, с целью определения размера (габаритов или объема) присоединенного прицепа (если таковой имеется) для каждой системы автомобиля. Данные о дорожном градиенте для первой системы автомобиля, содержащей только автомобиль 502, сравнивают с данными по второй системе автомобиля 504, содержащей маленький прицеп, присоединенный к автомобилю 504, и с данными по третьей системе автомобиля 506, содержащей больший прицеп, присоединенный к автомобилю 506. В зависимости от размера прицепа, присоединенного к автомобилю, может измениться разность между значением дорожного градиента, определяемого в режиме реального времени (посредством оценки сил контакта колес автомобиля), и значением ожидаемого дорожного градиента (полученным из внешнего источника или бортовой карты).
Первый график 508 показывает изменения профиля возвышения дорожного сегмента, по которому двигается автомобиль в течение некоторого периода времени, где ось X отображает время. Навигационную систему, соединенную с системой автомобиля, могут использовать для получения информации об ожидаемом дорожном градиенте для дорожного сегмента, по которому движется автомобиль. Кроме того, информацию об ожидаемом дорожном градиенте для всего маршрута движения автомобиля могут получить и сохранить в памяти контроллера как внешнюю карту маршрута. Дополнительно или факультативно, система автомобиля может содержать устройство беспроводной связи для непосредственной связи с сетевым облачным хранилищем (внешним сервером), для получения информации об ожидаемом дорожном градиенте. Дополнительно или факультативно, устройство беспроводной связи могут использовать для обмена данными с другими подобными системами автомобиля посредством технологии автомобиль-автомобиль (V2V). Указанные автомобили могут быть частью общего парка автомобилей, автомобилями аналогичного производителя и/или аналогичной модели, а также автомобилями, эксплуатируемыми в пределах порогового значения радиуса для заданного автомобиля, или комбинацией этих вариантов. Используя устройство беспроводной связи и/или технологию V2V, система автомобиля может непосредственно получать информацию об ожидаемом дорожном градиенте от внешнего сервера или других подобных автомобилей. В отсутствие внешних данных (внешней карты) с информацией о дорожном градиенте, могут использовать бортовую карту с высоким коэффициентом доверия, для получения информации об ожидаемом дорожном градиенте для соответствующего дорожного сегмента.
На диаграмме 550, на графиках 510-514, изображены оценки дорожного градиента, выполненные относительно горизонтальной дороги, посредством анализа сил контакта колес, и на основе полученных данных из внешней карты или бортовой карты. Вертикальная ось (ось Y) отображает дорожный градиент относительно горизонтальной дороги (в процентном выражении). Горизонтальная ось (ось X) обозначает время, а вертикальные маркеры t1-t4 указывают на важные моменты времени в определении характеристик прицепа. График 510 показывает ожидаемый дорожный градиент (полученный из внешней или бортовой карты). Ожидаемый дорожный градиент (график 510) может быть подобен дорожному градиенту для оценки сил контакта колес для калиброванной системы автомобиля без какого-либо присоединенного прицепа (например, для системы автомобиля 502). График 512 показывает дорожный градиент, определенный в режиме реального времени, на основе сил контакта колес для системы автомобиля с маленьким прицепом (например, для системы автомобиля 504). График 514 показывает дорожный градиент, определенный в режиме реального времени, на основе сил контакта колес для системы автомобиля с большим прицепом (например, для системы автомобиля 506).
Различие между оценками дорожного градиента двух систем с прицепами основано на различии в инерции и аэродинамическом сопротивлении, вследствие различных размеров и значений веса присоединенных прицепов. Чем больше прицеп, тем больше влияние инерции и аэродинамического сопротивления, особенно во время движения на высокой скорости. Поэтому, чем больше прицеп, тем более явным оказывается различие (превышение) между ожидаемым дорожным градиентом и оценкой дорожной градиента, выполненной посредством автомобиля. Также, размер лобовой части автомобиля непосредственно влияет на аэродинамическое сопротивление автомобиля, тогда как масса автомобиля влияет на инерционное сопротивление автомобиля. Разность между ожидаемым дорожным градиентом (график 510) и дорожным градиентом, определенным в режиме реального времени (график 512), при помощи контроллера второй системы автомобиля 504, обозначена ΔG1. Аналогичным образом, разность между ожидаемым дорожным градиентом (график 510) и дорожным градиентом, определенным в режиме реального времени (график 514), при помощи контроллера третьей системы автомобиля 506, обозначена ΔG2.
До момента времени t1, как показано на графике 508, нет существенного отклонения дороги от горизонтали. Как показано на графиках 510, 512 и 514, во время движения на ровных дорожных поверхностях, оценки дорожного градиента для любой системы автомобиля, то есть, для автомобиля 504 с маленьким прицепом и автомобиля 506 с большим автомобильным прицепом существенно не отличаются от оценки ожидаемого дорожного градиента, полученного из внешней или бортовой карты. Поэтому это различие не может использоваться для определения размера прицепа.
В момент времени t1 появляется уклон дороги (подъем дороги). Вследствие изменения профиля дороги (подъема дороги), в то время, когда автомобили поднимаются по склону, каждая система автомобиля, с легким или тяжелым прицепом, создает различные эффекты инерции и аэродинамического сопротивления, пропорционально размеру прицепа для указанных систем автомобиля. Таким образом, в этот период времени, оценки дорожного градиента, выполненные в режиме реального времени, для системы автомобиля с маленьким прицепом и системы автомобиля с большим прицепом, существенно отличаются от соответствующих оценок ожидаемого дорожного градиента, полученных из внешней или бортовой карты. Между моментами времени t1 и t2, на сегменте подъема дороги, разность (ΔG1) между ожидаемым дорожным градиентом (график 510) и дорожным градиентом, определенным в режиме реального времени (график 512 для системы автомобиля 504), могут сравнить с пороговым значением разности. Если разность (ΔG1) меньше порогового значения разности, то могут сделать вывод, что прицеп маленький. Аналогичным образом, разность (ΔG2) между ожидаемым дорожным градиентом (график 510) и дорожным градиентом, определенным в режиме реального времени (график 514 для системы автомобиля 506), могут сравнить с пороговым значением разности. Если разность (ΔG2) больше порогового значения разности, то могут сделать вывод, что прицеп большой. В этом примере, основанном на разностях ΔG1 и ΔG2, могут сделать вывод, что система автомобиля 504 содержит маленький прицеп, присоединенный к автомобилю, а система автомобиля 506 содержит большой прицеп, присоединенный к автомобилю.
Между моментами времени t2 и t3, как показано на графике 508, нет существенного отклонения дороги от горизонтали. В этот период времени различие между графиками 510, 512 и 514 остается постоянным. В момент времени t3, когда профиль дороги изменяется, оценки ожидаемого дорожного градиента и оценки дорожного градиента, выполненные соответствующими системами автомобиля, соответственно изменяются. Между моментами времени t3 и t4, вследствие изменения профиля (уклон вниз на дороге), поскольку автомобили двигаются вниз по склону, каждая система автомобиля, с легким или тяжелым прицепом, создает различные эффекты инерции и аэродинамического сопротивления, пропорционально своему размеру. Таким образом, в этот период времени оценки дорожного градиента как для системы автомобиля с маленьким прицепом, так и для системы автомобиля с большим прицепом, существенно отличаются от оценки ожидаемого дорожного градиента, полученной из внешней или бортовой карты. И снова, в момент времени t4, не наблюдается какое-либо дальнейшее отклонение дороги от горизонтали. После момента времени t4 различие между графиками 510, 512 и 514 может оставаться постоянным.
Таким образом, во время установившегося движения автомобиля, размер прицепа могут определить на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, причем размер полагают увеличенным, если значение дорожного градиента, определенного в режиме реального времени, превышает значение ожидаемого дорожного градиента. На основе полученного размера прицепа могут регулировать работу двигателя для оптимизации производительности двигателя и автомобиля.
На фиг. 6 показан пример 600 определения различия между легким (с меньшим значением массы) и тяжелым (с увеличенным значением массы) прицепами, на основе различия между оценками дорожного градиента, определяемого в режиме реального времени, и ожидаемого дорожного градиента, для дорожного сегмента. Можно сравнить три системы автомобиля, движущиеся по дорожному сегменту, с целью определения веса (массы) присоединенного прицепа (если таковой имеется) для каждой системы автомобиля. Первая система автомобиля 602 может содержать автомобиль, использовавшийся ранее для буксировки прицепа. В этом примере система автомобиля 602 не имеет никакого присоединенного прицепа. Вторая система автомобиля 604 может содержать автомобиль, подобный автомобилю 602, и легкий прицеп, присоединенный к автомобилю. Третья система автомобиля 606 может содержать автомобиль, подобный автомобилю 602, и тяжелый прицеп, присоединенный к автомобилю. Следует отметить, что различие между легким и тяжелым прицепом может зависеть от веса прицепа (для каждой из систем автомобиля 604 и 606) относительно собственного веса автомобиля 602, буксирующего прицеп. Например, если вес присоединенного прицепа меньше порогового значения процента веса буксирующего автомобиля 602, то прицеп могут классифицировать как легкий прицеп, а если вес присоединенного прицепа больше порогового значения процента собственного веса буксирующего автомобиля 602, то прицеп могут классифицировать как легкий прицеп. В зависимости от веса прицепа, присоединенного к автомобилю, может существовать различие между значением дорожного градиента, определенного в режиме реального времени (посредством оценки сил контакта колес автомобиля), и значением ожидаемого дорожного градиента (полученным из внешнего источника или бортовой карты).
Первый график 608 показывает профиль уклонов ожидаемого дорожного полотна (дорожного сегмента) в течение некоторого периода времени (ось X отображает время). Второй график 610 показывает изменение скорости автомобилей в течение некоторого периода времени, когда системы автомобилей движутся по дорожному сегменту. Диаграмма 650 показывает оценки дорожного градиента, выполненные в режиме реального времени, относительно горизонтального дорожного полотна, на основе анализа сил контакта колес и по данным из внешней карты или бортовой карты. Вертикальная ось (ось Y) отображает дорожный градиент относительно горизонтальной дороги (в процентном выражении). Горизонтальная ось (ось X) обозначает время, а вертикальные маркеры t1 и t2 указывают на важные моменты времени в определении веса прицепа. График 612 показывает ожидаемый дорожный градиент, полученный из внешней или бортовой карты. Значения ожидаемого дорожного градиента (график 612) могут быть очень близки к значениям дорожного градиента, оцененного в режиме реального времени, на основе сил контакта колес системы автомобиля без какого-либо присоединенного прицепа (например, системы автомобиля 602). График 614 показывает дорожный градиент, оцененный в режиме реального времени, на основе сил контакта колес второй системы автомобиля 604. График 616 показывает дорожный градиент, оцененный в режиме реального времени, на основе сил контакта колес третьей системы автомобиля 606.
Разность между значением дорожного градиента, определяемого в режиме реального времени, и значением ожидаемого дорожного градиента, оцененную во время ускорения (или замедления) могут использовать для определения веса прицепа, присоединенного к системе автомобиля. Поскольку инерция прямо пропорциональна весу корпуса, автомобилю с прицепом, имеющим более высокий вес, может потребоваться больше времени, чтобы ускориться на том же самом дорожном сегменте, чем автомобилю с прицепом, имеющим меньший вес. Кроме того, различие между силами контакта колес этих двух систем автомобиля (создающее различие оценок дорожного градиента) основано на различии в инерции вследствие различных весов присоединенных прицепов. Чем тяжелее прицеп, тем больше влияние инерции (особенно во время ускорения и замедления). Поэтому более тяжелый прицеп обеспечивает более явное (увеличенное) различие между ожидаемым дорожным градиентом и оценкой дорожного градиента посредством автомобиля, во время событий замедления и ускорения. В этом примере показана разность ΔW1 между ожидаемым дорожным градиентом (график 612) и дорожным градиентом, определенным в режиме реального времени (график 614), то есть оцененным контроллером второй системы автомобиля 604. Аналогичным образом показана разность ΔW2 между ожидаемым дорожным градиентом (график 612) и дорожным градиентом, определенным в режиме реального времени (график 514), то есть оцененным контроллером третьей системы автомобиля 606.
Как показано на графике 608, профиль дороги не изменяется в значительной степени по всему дорожному сегменту. До момента времени t1 скорость автомобиля также значительно не изменяется. Как показано на графиках 612, 614 и 616, во время движения на установившейся скорости, оценки дорожного градиента как для автомобиля с легким прицепом, так и для автомобиля с тяжелым прицепом существенно не отличаются от оценки ожидаемого дорожного градиента, полученной из внешней или бортовой карты. Однако в это время указанное различие не может быть достаточно значительным, чтобы позволить определить вес соответствующих прицепов. Между моментами времени t1 и t2 происходит увеличение скорости автомобиля. Другими словами, системы автомобиля ускоряются между моментами времени t1 и t2. Вследствие ускорения, каждая из систем автомобиля, с легким и тяжелым прицепами, создает различные эффекты инерции, пропорционально своему размеру. Поэтому, в этот период времени оценки дорожного градиента для автомобиля с легким прицепом и для автомобиля с тяжелым прицепом существенно отличаются от оценки ожидаемого дорожного градиента, полученной из внешней или бортовой карты.
Во время ускорения, между моментами времени t1 и t2, разность (ΔW1) между ожидаемым дорожным градиентом (график 612) и дорожным градиентом, определенным в режиме реального времени (график 614), могут использовать для оценки веса прицепа в системе автомобиля 604. Точно так же разность (ΔW2) между ожидаемым дорожным градиентом (график 612) и дорожным градиентом, определенным в режиме реального времени (график 616), могут использовать для оценки веса прицепа в системе автомобиля 606. Предполагаемые значения веса каждого из прицепов, содержащихся в системах автомобиля 604 и 606, могут сравнить с пороговым значением веса, чтобы определить, является ли прицеп легким или тяжелым. Если предполагаемый вес больше порогового значения веса, то могут сделать вывод, что прицеп тяжелый, а если предполагаемый вес меньше порогового значения веса, то могут сделать вывод, что прицеп легкий. В этом примере, на основе предполагаемых значений веса прицепов, содержащихся в системах автомобиля 604 и 606, могут сделать вывод, что система автомобиля 604 содержит легкий прицеп, присоединенный к автомобилю, а система автомобиля 606 содержит тяжелый прицеп, присоединенный к автомобилю.
После момента времени t2 автомобиль может работать на установившейся скорости без дальнейшего ускорения. Как показано на графиках 612, 614 и 616, во время движения на установившейся скорости, снова можно наблюдать постоянную разность между оценками дорожного градиента для автомобиля, имеющего легкий прицеп, и для автомобиля, имеющего тяжелый прицеп, и оценкой ожидаемого дорожного градиента, полученной из внешней или бортовой карты.
Таким образом, во время ускорения автомобиля, вес прицепа могут определить на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, причем вес полагают увеличенным, если значение дорожного градиента, определенного в режиме реального времени, превышает значение ожидаемого дорожного градиента. На основе определения веса прицепа могут обновить параметры работы двигателя с целью оптимизации производительности двигателя и автомобиля.
На фиг. 7 показан пример 700 определения различия между прицепом с маленькой лобовой частью и прицепом с большой лобовой частью, на основе различия между значением оценки градиента, определяемого в режиме реального времени, и значением оценки ожидаемого дорожного градиента для дорожного сегмента, во время движения на низкой скорости и на высокой скорости. Размер лобовой части прицепа может влиять на оценку коэффициента аэродинамического сопротивления для прицепа. Можно сравнить три системы автомобиля, двигающиеся по дорожному сегменту на двух различных скоростях (сначала на более низкой скорости и затем на более высокой скорости), чтобы определить размер лобовой части присоединенного прицепа (если таковой имеется) для каждой системы автомобиля. Первая система автомобиля 702 может содержать автомобиль, использовавшийся ранее для буксировки прицепа. В этом примере система автомобиля 702 не имеет никакого присоединенного прицепа. Вторая система автомобиля 704 может содержать автомобиль, подобный автомобилю 702, и прицеп с маленькой лобовой частью, присоединенный к автомобилю. Третья система автомобиля 706 может содержать автомобиль, подобный автомобилю 702, и прицеп с большой лобовой частью, присоединенный к автомобилю. В зависимости от размера лобовой части прицепа, присоединенного к автомобилю, может существовать различие между значением оценки градиента, определяемого в режиме реального времени (на основе сил контакта колес автомобиля), и значением оценки ожидаемого дорожного градиента (полученным из внешнего источника или бортовой карты) во время движения с низкой скоростью и с высокой скоростью.
Первый график 708 показывает профиль уклонов ожидаемого дорожного полотна (дорожного сегмента) в течение некоторого периода времени (ось X отображает время). Второй график 710 показывает изменение скорости автомобилей в течение некоторого периода времени, когда системы автомобилей движутся по дорожному сегменту. Диаграмма 750 показывает оценки дорожного градиента, выполненные в режиме реального времени, относительно горизонтального дорожного полотна, на основе анализа сил контакта колес и по данным из внешней карты или бортовой карты. Вертикальная ось (ось Y) отображает дорожный градиент относительно горизонтальной дороги (в процентном выражении). Горизонтальная ось (ось X) обозначает время, а вертикальный маркер t1 указывает на важные моменты времени в определении веса прицепа. График 712 показывает ожидаемый дорожный градиент, полученный из внешней или бортовой карты. Значения ожидаемого дорожного градиента (график 712) могут быть очень близки к значениям дорожного градиента, оцененным на основе сил контакта колес первой системы автомобиля без какого-либо присоединенного прицепа (например, системы автомобиля 702). График 714 показывает дорожный градиент, оцененный в режиме реального времени, на основе сил контакта колес второй системы автомобиля (например, системы автомобиля 704). График 716 показывает дорожный градиент, оцененный в режиме реального времени, на основе сил контакта колес третьей системы автомобиля (например, системы автомобиля 706). Низкая скорость движения систем автомобиля может быть обозначена V1, а высокая скорость движения систем автомобиля может быть обозначена V2.
Сравнивая различие между значением оценки дорожного градиента, выполненной в режиме реального времени, и значением оценки ожидаемого дорожного градиента для дорожного сегмента, во время движения с низкой скоростью, и различие между значением оценки дорожного градиента, выполненной в режиме реального времени, и значением оценки ожидаемого дорожного градиента для дорожного сегмента, во время движения с высокой скоростью, могут определить размер лобовой части прицепа. Аэродинамическое сопротивление пропорционально квадрату скорости автомобиля и размеру лобовой части. Чем больше лобовая часть прицепа, тем больше аэродинамическое сопротивление, особенно на высоких скоростях. Если прицеп, присоединенный к автомобилю, имеет маленькую лобовую часть, разность между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом может не измениться в значительной степени для движения с низкой скоростью и с высокой скоростью вследствие низкого аэродинамического сопротивления. Зато для прицепа с большой лобовой частью разность между дорожным градиентом, определенным в режиме реального времени, и ожидаемым дорожным градиентом может значительно измениться для движения с низкой скоростью и с высокой скоростью вследствие высокого аэродинамического сопротивления. Поэтому, определяя различие между оценками дорожного градиента во время движения с низкой скоростью и с высокой скоростью, можно узнать, имеет ли прицеп, присоединенный к автомобилю, маленькую или большую лобовую часть. В этом примере разности между ожидаемым дорожным градиентом (график 712) и дорожным градиентом, определенным в режиме реального времени (график 714), и оцененным контроллером второй системы автомобиля 704, во время движения с низкой скоростью (V1) и с высокой скоростью (V2), обозначены соответственно ΔS1 и ΔS2. Точно так же разности между ожидаемым дорожным градиентом (график 712) и дорожным градиентом, определенным в режиме реального времени (график 716), и оцененным контроллером третьей системы автомобиля 706, во время движения с низкой скоростью (V1) и с высокой скоростью (V2), обозначены соответственно ΔL1 и ΔL2.
Как показано на графике 708, профиль дороги не изменяется в значительной степени по всему дорожному сегменту. До момента времени t1 система (системы) автомобиля двигается с низкой скоростью, V1, которая также не изменяется в значительной степени в течение некоторого периода времени. Как показано на графиках 712, 714 и 716, во время движения на скорости V1, оценки дорожного градиента для каждого из автомобилей с прицепами, имеющими маленькую и большую лобовую часть, отличаются от оценки ожидаемого дорожного градиента, полученной из внешней или бортовой карты. В момент времени t1 происходит изменение скорости систем автомобиля. Обе системы автомобиля с прицепами, имеющими маленькую и большую лобовую часть, ускоряются в течение короткого времени, чтобы достигнуть более высокой скорости автомобиля, V2.
После момента времени t2 системы автомобиля двигаются с установившейся высокой скоростью V2. На скорости V2 оценки дорожного градиента для каждого из автомобилей с прицепами, имеющими маленькую и большую лобовую часть, отличаются от оценки ожидаемого дорожного градиента, полученной из внешней или бортовой карты. Однако можно видеть, что разность (ΔS1) между ожидаемым дорожным градиентом (график 712) и дорожным градиентом, определенным в режиме реального времени (график 714) для системы автомобиля 704 во время движения с низкой скоростью (V1) не существенно отличается от разности (ΔS2) между ожидаемым дорожным градиентом (график 712) и дорожным градиентом, определенным в режиме реального времени (график 714) во время движения с высокой скоростью (V2). Так как разность между значением дорожного градиента, определяемого в режиме реального времени, и значением ожидаемого дорожного градиента не может заметно измениться для движения как с низкой скоростью, так и с высокой скоростью, вследствие низкого аэродинамического сопротивления, то могут сделать вывод, что прицеп, присоединенный к системе автомобиля 704, имеет маленькую лобовую часть. Также можно видеть, что существует значительное различие для разностей между ожидаемым дорожным градиентом (график 712) и дорожным градиентом, определенным в режиме реального времени (график 714) для системы автомобиля 706, во время движения с низкой скоростью (V1), то есть разностью ΔS1, и во время движения с высокой скоростью (V2), то есть разностью AS2. Поэтому, учитывая значительные различия между значениями дорожного градиента, определяемого в режиме реального времени, и значениями ожидаемого дорожного градиента во время движения с низкой скоростью и с высокой скоростью, вследствие высокого аэродинамического сопротивления, могут сделать вывод, что прицеп, присоединенный к системе автомобиля 706, имеет большую лобовую часть.
Таким образом, во время замедления автомобиля, размер лобовой части прицепа могут определить на основе первого изменения дорожного градиента, определяемого в режиме реального времени, относительно второго изменения ожидаемого дорожного градиента, причем размер лобовой части полагают увеличенным, если первое изменение превышает второе изменение. Кроме того, определение размера лобовой части могут выполнить во время событий замедления. Во время замедлений, когда скорость системы автомобиля уменьшается, разность между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом может измениться вследствие непостоянства аэродинамического сопротивления. Если это изменение превышает пороговое значение изменения, то могут сделать вывод, что прицеп имеет большую лобовую часть, а если это изменение меньше порогового значения изменения, то могут сделать вывод, что прицеп имеет маленькую лобовую часть. Достоверно определяя необходимые характеристики прицепа, в том числе, размер лобовой части прицепа, могут оптимизировать характеристики двигателя для определенного вида прицепов, улучшив ощущения при вождении, управление температурой трансмиссии, топливную экономичность и качество отработавших газов.
Один пример способа содержит, во время движения автомобиля по дорожному сегменту, выявление характеристик прицепа, присоединенному к автомобилю, на основе дорожного градиента, определяемого в режиме реального времени, относительно ожидаемого дорожного градиента, для соответствующего дорожного сегмента; и регулирование работы автомобиля, на основе выявленных характеристик. В предыдущем примере, дополнительно или факультативно, дорожный градиент, определяемый в режиме реального времени, оценивают на основе профиля скорости автомобиля во время движения по дорожному сегменту и дополнительно на основе сил контакта колес автомобиля, посредством оценки контроллером трансмиссии. В любом из предыдущих примеров, дополнительно или факультативно, значения ожидаемого дорожного градиента получают посредством навигационной системы, расположенной на борту автомобиля, причем навигационная система соединена с возможностью обмена данными с системой управления автомобилем. В любом из предыдущих примеров, дополнительно или факультативно, навигационная система дополнительно соединена с возможностью обмена данными с сервером, расположенным вне автомобиля, и причем значения ожидаемого дорожного градиента получают в автомобиле от сервера, расположенного вне автомобиля, посредством навигационной системы. В любом из предыдущих примеров, дополнительно или факультативно, выявляемые характеристики содержат одно или более из следующего: вес прицепа, размер прицепа и размер лобовой части прицепа. В любом из предыдущих примеров, дополнительно или факультативно, указанное выявление содержит выявление размера прицепа, на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, во время движения автомобиля с установившейся скоростью по дорожному сегменту, причем выявленный размер полагают увеличенным, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент. В любом из предыдущих примеров, дополнительно или факультативно, указанное выявление содержит выявление веса прицепа, на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом во время ускорения автомобиля на дорожном сегменте, причем выявленный вес полагают увеличенным, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент. В любом из предыдущих примеров, дополнительно или факультативно, выявление содержит выявление размера лобовой части прицепа, на основе первого изменения дорожного градиента, определяемого в режиме реального времени, относительно второго изменения ожидаемого дорожного градиента, во время замедления автомобиля на дорожном сегменте, причем выявленный размер лобовой части полагают увеличенным, если первое изменение превышает второе изменение. В любом из предыдущих примеров, дополнительно или факультативно, выявление содержит выявление размера лобовой части прицепа, на основе первого различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, во время движения автомобиля с высокой установившейся скоростью, относительно второго различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, во время движения автомобиля с низкой установившейся скоростью, причем выявленный размер лобовой части полагают увеличенным, если первое различие превышает второе различие. Любые из предыдущих примеров, дополнительно или факультативно, содержат оценку первой массы автомобиля, на основе дорожного градиента, определяемого в режиме реального времени, и второй массы автомобиля, на основе ожидаемого дорожного градиента, причем выявление содержит выявление веса прицепа, на основе сравнения первой массы относительно второй массы, причем выявленный вес полагают увеличенным, если первая масса больше второй массы. Любые из предыдущих примеров, дополнительно или факультативно, содержат загрузку данных о градиенте, определяемом в режиме реального времени, на сервер, расположенный вне автомобиля, и обновление данных об ожидаемом дорожном градиенте на основе данных о градиенте, определяемом в режиме реального времени. В любом из предыдущих примеров, дополнительно или факультативно, регулирование работы автомобиля содержит регулирование одного или более из следующего: график переключения передач в трансмиссии, потребление топлива двигателем и управление стабильностью автомобиля и его поперечным смещением.
Другой пример способа содержит выработку оценки усредненного дорожного градиента для дорожного сегмента, на борту автомобиля, на основе сил контакта колес во время движения автомобиля, причем коэффициент доверия для оценки усредненного дорожного градиента увеличивают в случае увеличения числа поездок по данному дорожному сегменту; при превышении коэффициентом доверия порогового значения коэффициента доверия, определение характеристик прицепа, присоединенного к автомобилю, на основе оценки усредненного дорожного градиента; и регулирование работы автомобиля в зависимости от характеристик прицепа. В предыдущем примере, дополнительно или факультативно, создание оценки усредненного дорожного градиента содержит определение оценки дорожного градиента, определяемого в режиме реального времени, в каждой поездке из числа поездок по данному дорожному сегменту и вычисление статистического среднего значения для каждой оценки дорожного градиента, определяемого в режиме реального времени. Любые из предыдущих примеров, дополнительно или факультативно, содержат, если коэффициент доверия меньше порогового значения коэффициента доверия, получение оценки ожидаемого дорожного градиента от сервера, расположенного вне автомобиля, и в данной поездке, определение характеристик прицепа на основе оценки усредненного дорожного градиента относительно оценки дорожного градиента, определяемого в режиме реального времени. В любом из предыдущих примеров, дополнительно или факультативно, определение характеристик прицепа содержит: во время установившегося движения автомобиля, определение размера прицепа на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, причем размер прицепа полагают увеличенным, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент; во время ускорения автомобиля, определение веса прицепа на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, причем вес прицепа полагают увеличенным, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент; и во время замедления автомобиля, определение размера лобовой части прицепа на основе первого изменения дорожного градиента, определяемого в режиме реального времени, относительно второго изменения ожидаемого дорожного градиента, причем размер лобовой части прицепа полагают увеличенным, если первое изменение превышает второе изменение. В любом из предыдущих примеров, дополнительно или факультативно, используют задержку переключения передач в трансмиссии, если размер прицепа увеличен; используют задержку переключения передач в трансмиссии, если вес прицепа увеличен; и используют задержку переключения передач в трансмиссии, если лобовая часть прицепа имеет увеличенный размер.
В еще одном примере система автомобиля содержит автомобиль с двигателем; трансмиссию с несколькими комплектами шестерен, выполненную с возможностью соединения двигателя с колесами автомобиля; прицеп, присоединенный к автомобилю; навигационную систему, соединенную с возможностью обмена данными с указанным автомобилем и с сервером, расположенным вне автомобиля; и контроллер с машиночитаемыми инструкциями, сохраненными в долговременной памяти для следующего: во время движения автомобиля по дорожному сегменту, оценка дорожного градиента, определяемого в режиме реального времени, на основе одного или более из следующего: крутящий момент двигателя, крутящий момент трансмиссии и передаточное отношение; сравнение дорожного градиента, определяемого в режиме реального времени, с ожидаемым дорожным градиентом, полученным посредством навигационной системы; выявление одной или нескольких характеристик прицепа на основе указанного сравнения; и регулирование графика переключения передач в трансмиссии на основе выявленных характеристик. В предыдущем примере, дополнительно или факультативно, выявление содержит оценку первой массы автомобиля на основе дорожного градиента, определяемого в режиме реального времени, оценку второй массы автомобиля, на основе ожидаемого дорожного градиента, и выявление одной или нескольких характеристик прицепа, на основе сравнения первой массы автомобиля относительно второй массы автомобиля, причем одна или несколько характеристик прицепа содержат размер прицепа, вес прицепа и размер лобовой части прицепа. В любом из предыдущих примеров, дополнительно или факультативно, ожидаемый дорожный градиент представляет собой первую оценку ожидаемого дорожного градиента, выполненную вне автомобиля, причем контроллер содержит дополнительные команды для: обновления оценки ожидаемого дорожного градиента, выполненной на борту автомобиля, на основе дорожного градиента, определяемого в режиме реального времени; и обновление коэффициента доверия для оценки ожидаемого дорожного градиента, выполненной борту автомобиля, на основе нескольких законченных поездок по данному дорожному сегменту.
Таким образом, посредством сравнения дорожного градиента, определяемого в режиме реального времени (оцененного на борту автомобиля), с ожидаемым дорожным градиентом, можно определить присутствие прицепа и в дальнейшем оценить характеристики прицепа, в том числе, его размер, вес и размер лобовой части. Кроме того, классификацию присоединенного прицепа могут выполнить автоматически без требования какого-либо участия водителя. Выполняя сравнение на различных уклонах дороги и при различных скоростях автомобиля, могут определить некоторые характеристики прицепа, например, вес прицепа и размер лобовой части прицепа. За счет определения характеристик прицепа (в том числе, подробностей размера, веса и размера лобовой части прицепа) во время движения автомобиля, могут оптимизировать характеристики двигателя на основе характеристик прицепа, что позволяет улучшить ощущения при вождении, управление температурой трансмиссии, топливную экономичность и качество отработавших газов. Технический эффект от создания и обновления бортовой карты с информацией о дорожном градиенте состоит в том, что даже в отсутствие внешней карты, например, из-за отсутствия беспроводного подключения и/или навигационных данных, бортовую карту могут использовать вместо внешней карты. Как только коэффициент доверия бортовой карты становится достаточно высоким, классификацию прицепов могут выполнить на основе бортовой карты даже в отсутствие какой-либо внешней карты.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут быть использованы с разнообразными конфигурациями систем двигателя и/или транспортного средства. Способы и алгоритмы управления, раскрытые в настоящей заявке, могут быть сохранены как исполняемые инструкции в долговременной памяти и выполнены управляющей системой, состоящей из контроллера в сочетании с различными датчиками, приводами и другими средствами двигателя. Конкретные алгоритмы, раскрытые в настоящей заявке, могут представлять собой одну или более стратегий обработки, таких как управляемые по событиям, управляемые по прерываниям, многозадачные, многопоточные и т.п. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут быть выполнены в указанной последовательности, параллельно или в некоторых случаях могут быть пропущены. Аналогично, указанный порядок обработки не обязателен для достижения отличительных признаков и преимуществ раскрываемых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут быть выполнены повторно в зависимости от конкретной применяемой стратегии. Более того, раскрытые действия, операции и/или функции могут представлять в графическом виде код, который должен быть запрограммирован в долговременную память машиночитаемой среды хранения данных в управляющей системе двигателя, при этом раскрытые действия могут быть выполнены посредством исполнения инструкций в системе, содержащей различные компоненты обеспечения двигателя совместно с электронным контроллером.
Следует понимать, что конфигурации и алгоритмы, раскрытые в настоящей заявке, носят иллюстративный характер, и что эти конкретные варианты осуществления изобретения не следует рассматривать в качестве ограничения, так как возможны многочисленные модификации. Например, вышеизложенная технология может быть применена в двигателях с конфигурацией цилиндров V-6, I-4, I-6, V-12, с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и конфигураций, а также другие отличительные признаки, функции и/или свойства, раскрытые в настоящей заявке.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации, которые считаются новыми и неочевидными. В таких пунктах формулы изобретения ссылка может быть сделана на «некоторый» элемент или «первый» элемент или эквивалент такого элемента. Следует понимать, что такие пункты формулы изобретения могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов формулы изобретения или путем представления новых пунктов формулы изобретения в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются ли они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| СПОСОБ ДЛЯ ПРОГРЕВА ВЫПУСКНОЙ СИСТЕМЫ | 2016 |
|
RU2682688C2 |
| СИСТЕМА И СПОСОБ ДЛЯ БОРТОВОЙ ОБРАБОТКИ ДАННЫХ | 2017 |
|
RU2698147C2 |
| СПОСОБ ОХЛАЖДЕНИЯ АВТОМОБИЛЯ (ВАРИАНТЫ) | 2017 |
|
RU2718391C2 |
| СПОСОБ И МОДУЛЬ ДЛЯ ОПРЕДЕЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ОПОРНОГО ЗНАЧЕНИЯ | 2011 |
|
RU2598494C2 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ КРУИЗ-КОНТРОЛЯ | 2017 |
|
RU2748955C2 |
| ОПРЕДЕЛЕНИЕ ЭКОНОМНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2501088C2 |
| Система и способ включения и отключения цилиндров двигателя | 2017 |
|
RU2687184C1 |
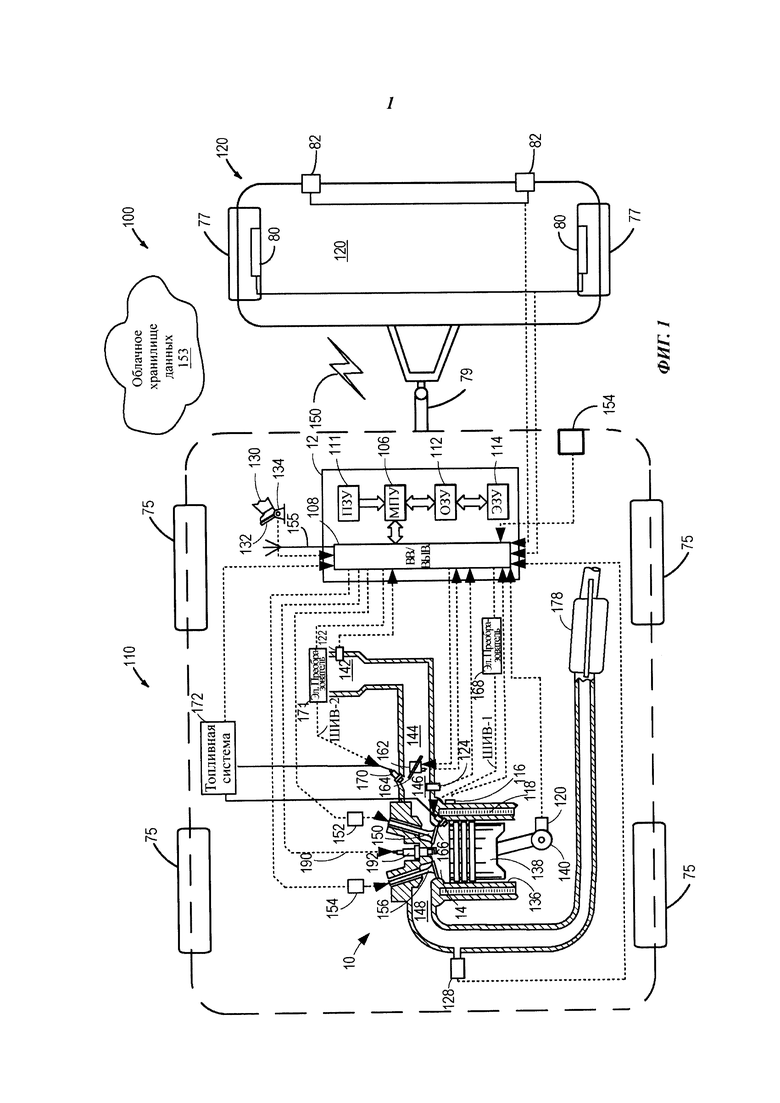
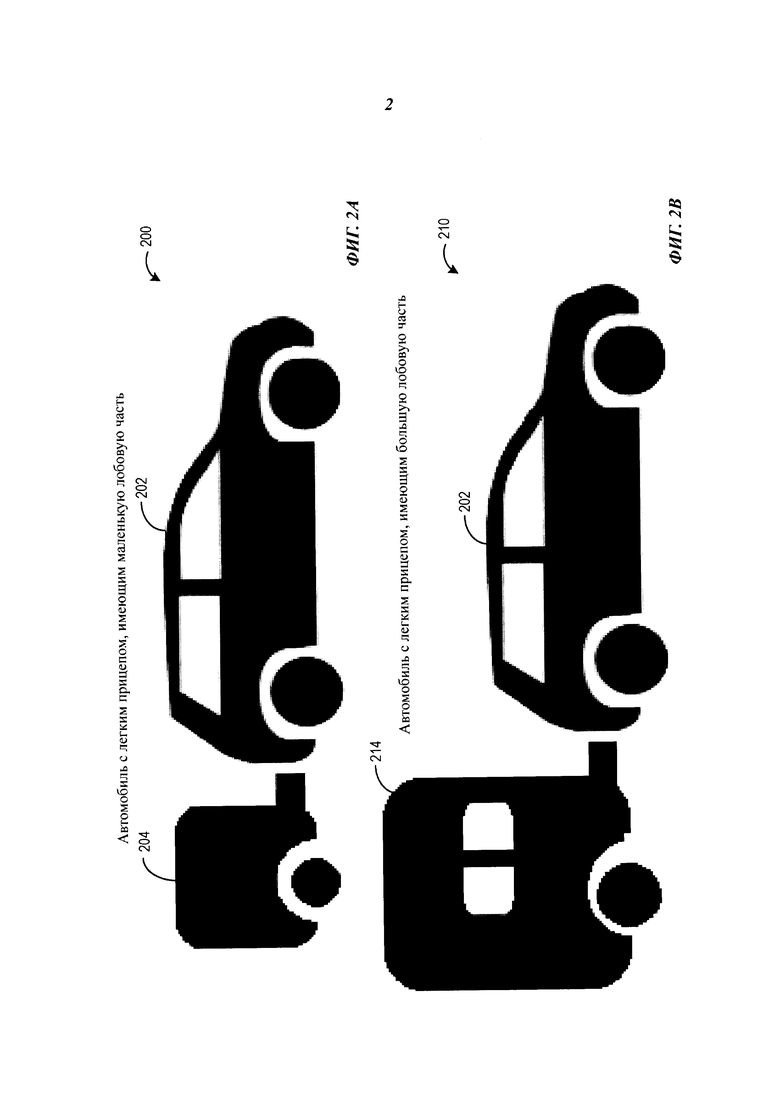
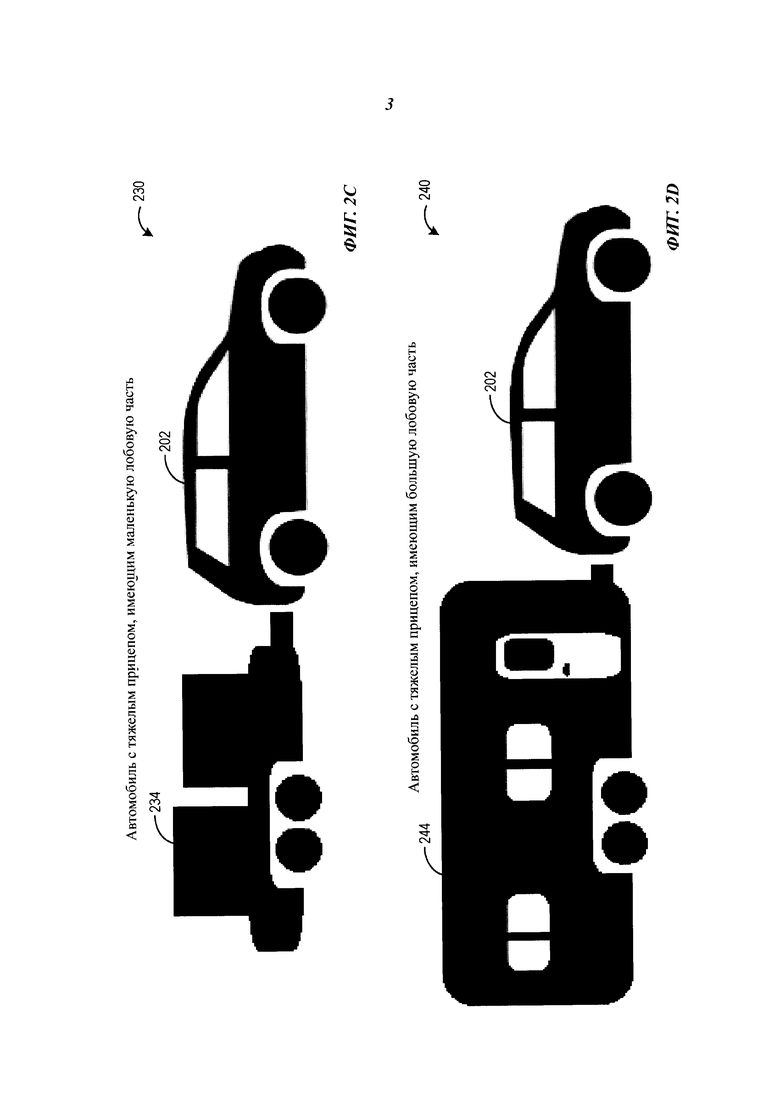
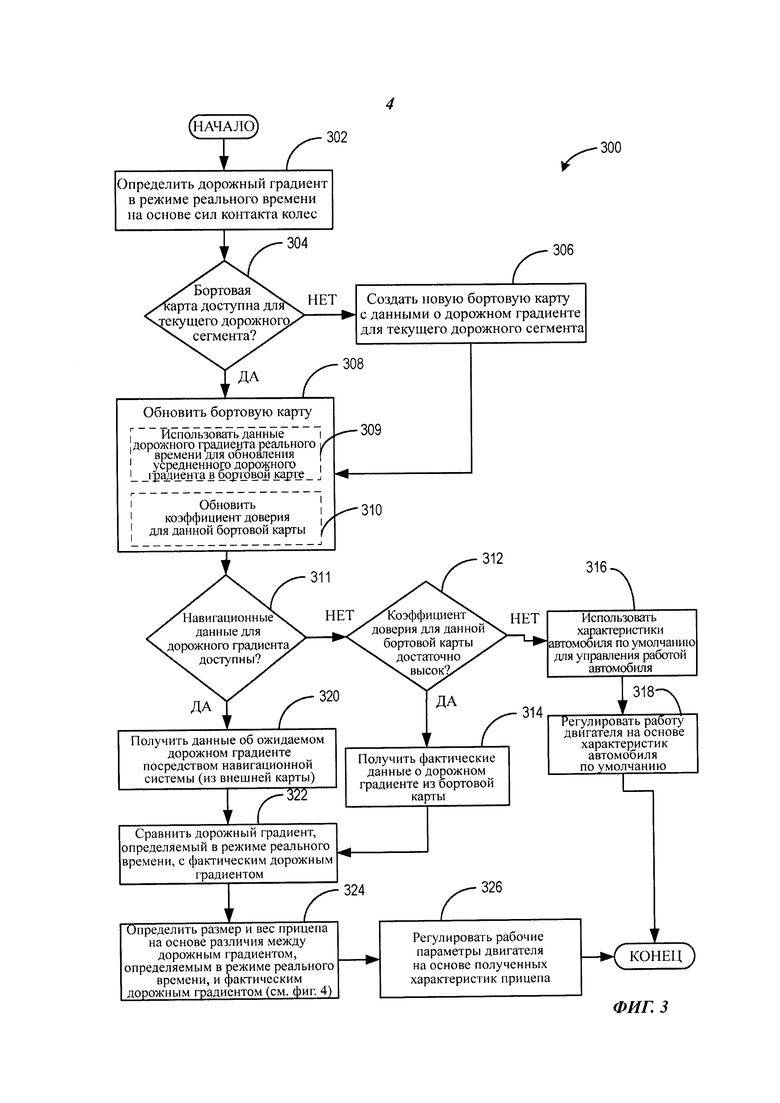
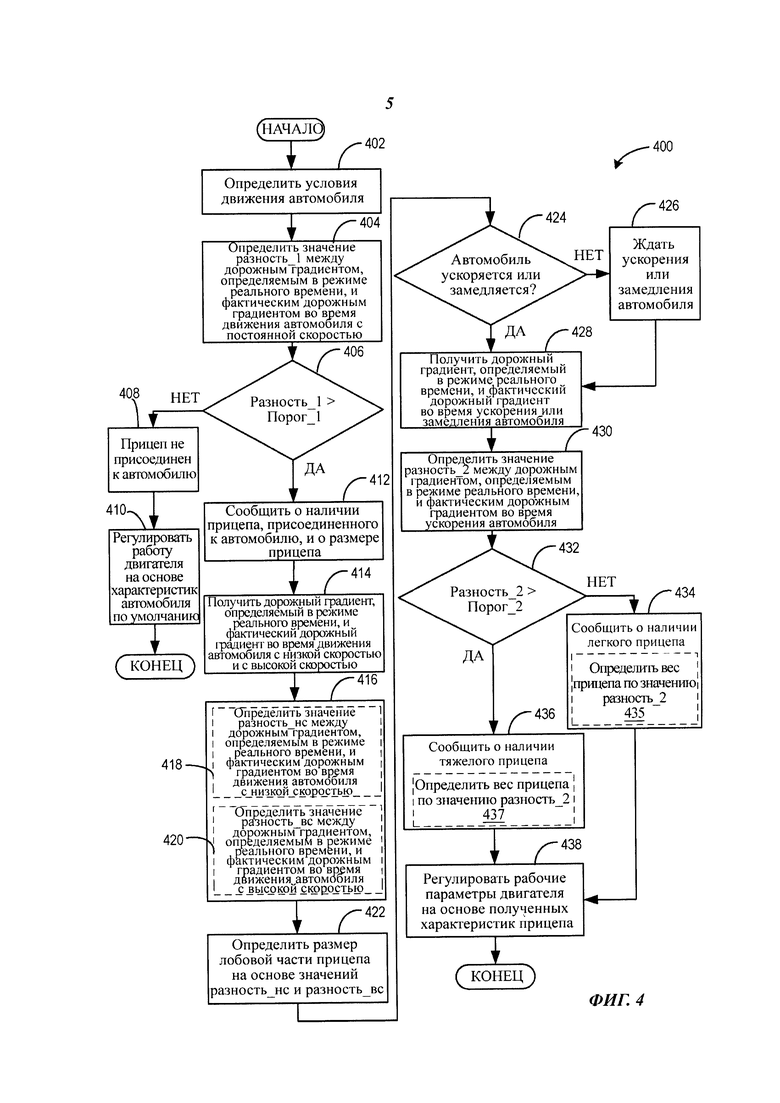
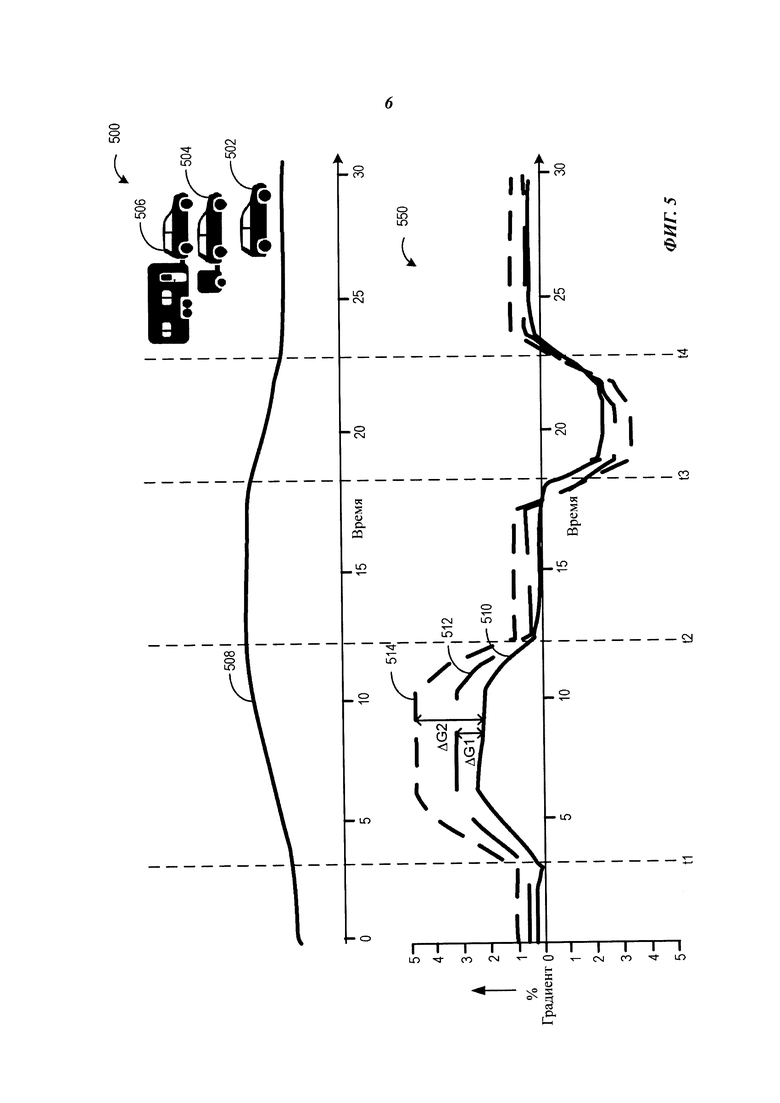
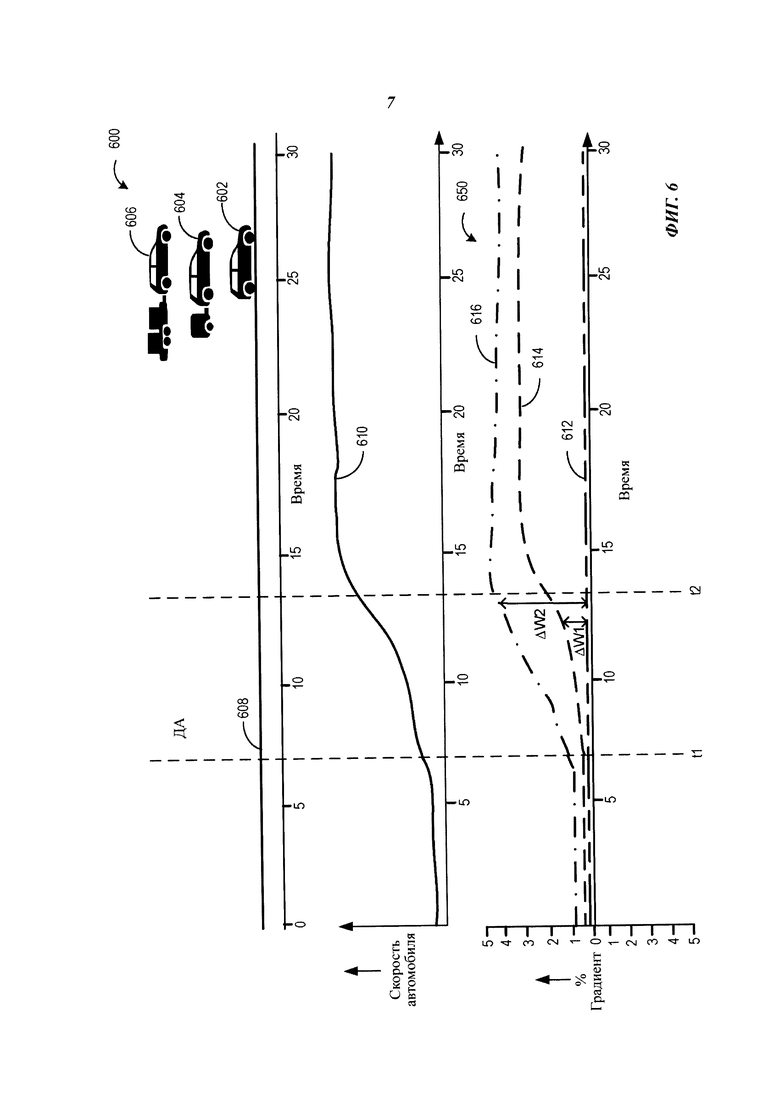
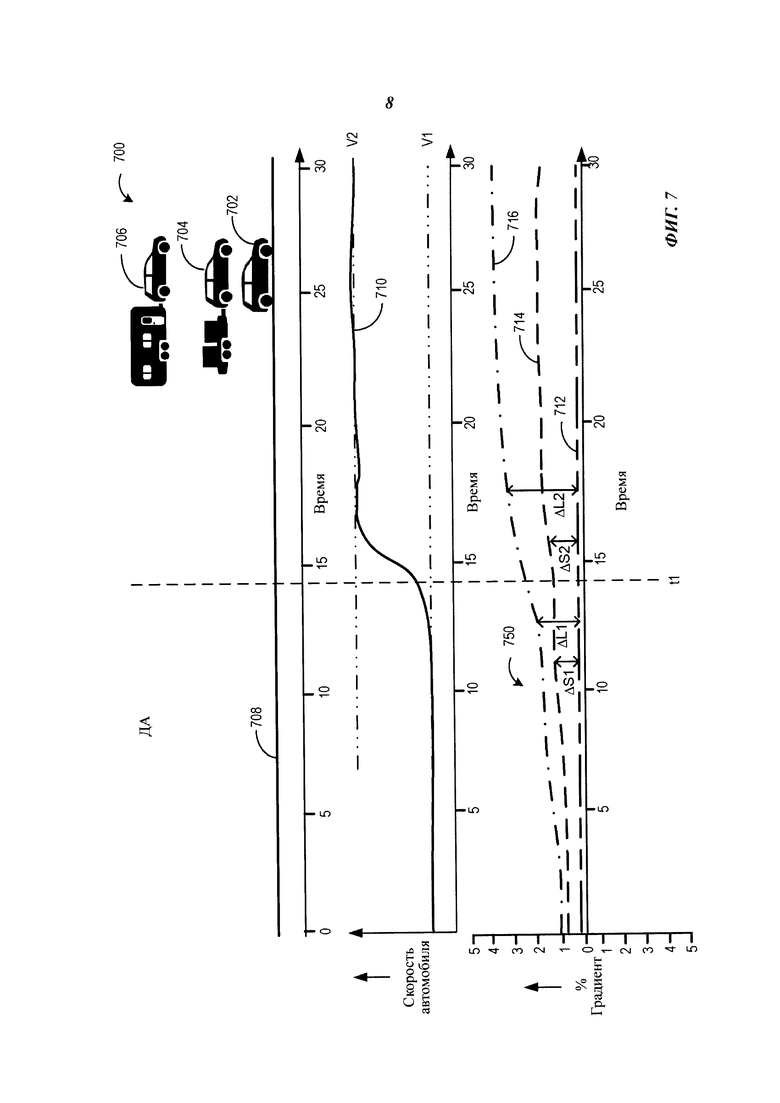
Группа изобретений относится способу для классификации типа и веса прицепа, буксируемого автомобилем. Способ содержит шаги, согласно которым во время движения автомобиля по дорожному сегменту выявляют характеристики прицепа, присоединенного к автомобилю, на основе дорожного градиента, определяемого в режиме реального времени, относительно ожидаемого дорожного градиента, для соответствующего дорожного сегмента. Регулируют работу автомобиля на основе выявленных характеристик. Достигается регулировка работы автомобиля на основе классификации присоединенного к автомобилю прицепа. 3 н. и 17 з.п. ф-лы, 7 ил.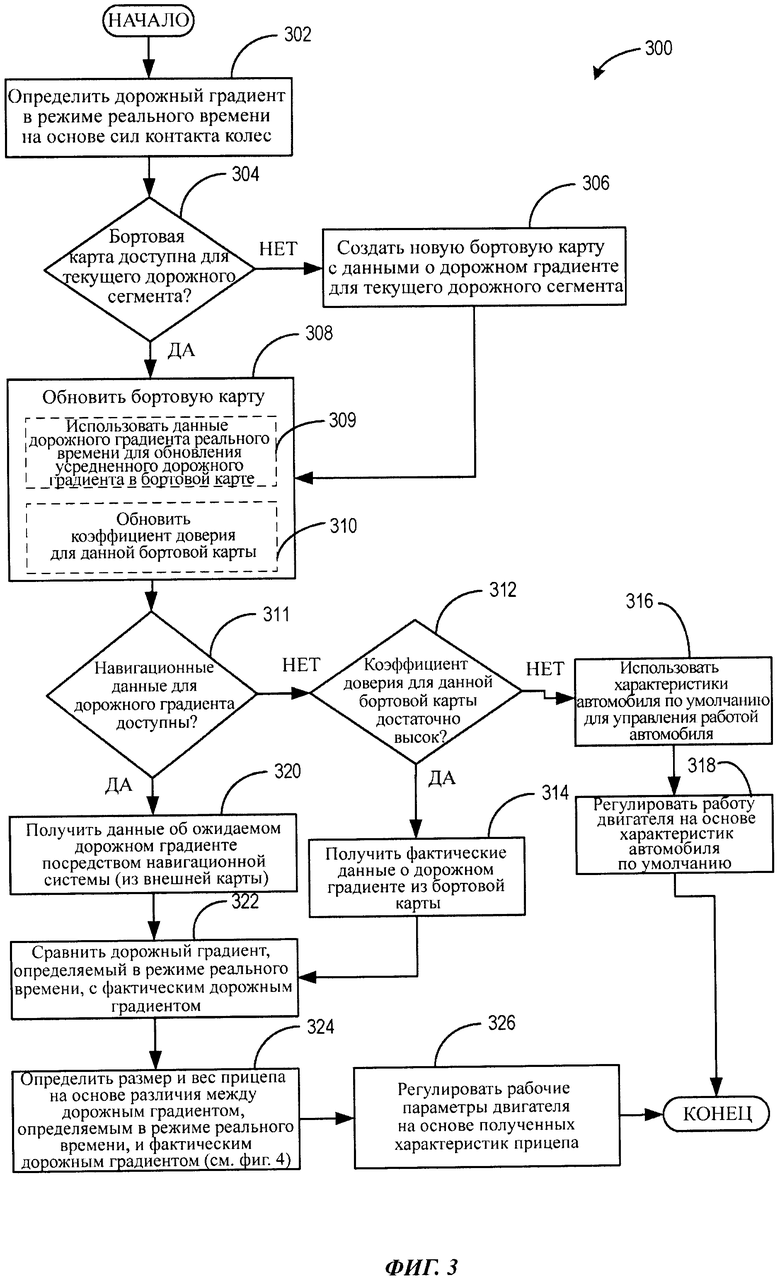
1. Способ классификации типа и веса прицепа, буксируемого автомобилем, содержащий шаги, на которых
во время движения автомобиля по дорожному сегменту выявляют характеристики прицепа, присоединенного к автомобилю, на основе дорожного градиента, определяемого в режиме реального времени, относительно ожидаемого дорожного градиента, для соответствующего дорожного сегмента; и
регулируют работу автомобиля на основе выявленных характеристик.
2. Способ по п. 1, отличающийся тем, дорожный градиент, определяемый в режиме реального времени, оценивают на основе профиля скорости автомобиля во время движения по дорожному сегменту и дополнительно на основе сил контакта колес автомобиля посредством оценки контроллером трансмиссии, и причем выявленные характеристики содержат размер лобовой части прицепа.
3. Способ по п. 1, отличающийся тем, что значение ожидаемого дорожного градиента получают посредством навигационной системы, расположенной на борту автомобиля, причем навигационная система соединена с возможностью обмена данными с системой управления автомобилем.
4. Способ по п. 3, отличающийся тем, что навигационная система дополнительно соединена с возможностью обмена данными с сервером, расположенным вне автомобиля, и причем значение ожидаемого дорожного градиента получают в автомобиле от сервера, расположенного вне автомобиля, посредством навигационной системы.
5. Способ по п. 2, отличающийся тем, что выявляемые характеристики содержат одно или более из следующего: вес прицепа, размер прицепа и размер лобовой части прицепа.
6. Способ по п. 2, отличающийся тем, что выявление содержит выявление размера прицепа на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, во время движения автомобиля с установившейся скоростью по дорожному сегменту, причем выявленный размер полагают увеличенным, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент.
7. Способ по п. 2, отличающийся тем, что выявление содержит выявление веса прицепа на основе различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом во время ускорения автомобиля на дорожном сегменте, причем выявленный вес полагают увеличенным, если дорожный градиент, определяемый в режиме реального времени, превышает ожидаемый дорожный градиент.
8. Способ по п. 2, отличающийся тем, что выявление содержит выявление размера лобовой части прицепа на основе первого изменения дорожного градиента, определяемого в режиме реального времени, относительно второго изменения ожидаемого дорожного градиента, во время замедления автомобиля на дорожном сегменте, причем выявленный размер лобовой части полагают увеличенным, если первое изменение превышает второе изменение.
9. Способ по п. 2, отличающийся тем, что выявление содержит выявление размера лобовой части прицепа на основе первого различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, во время движения автомобиля с высокой установившейся скоростью, относительно второго различия между дорожным градиентом, определяемым в режиме реального времени, и ожидаемым дорожным градиентом, во время движения автомобиля с низкой установившейся скоростью, причем выявленный размер лобовой части полагают увеличенным, если первое различие превышает второе различие.
10. Способ по п. 2, отличающийся тем, что дополнительно оценивают первую массу автомобиля, на основе дорожного градиента, определяемого в режиме реального времени, и вторую массу автомобиля на основе ожидаемого дорожного градиента, причем выявление содержит выявление веса прицепа на основе сравнения первой массы относительно второй массы, причем выявленный вес полагают увеличенным, если первая масса больше второй массы.
11. Способ по п. 4, отличающийся тем, что дополнительно загружают данные о дорожном градиенте, определяемом в режиме реального времени, на сервер, расположенный вне автомобиля, и обновляют данные об ожидаемом дорожном градиенте на основе дорожного градиента, определяемого в режиме реального времени.
12. Способ по п. 1, отличающийся тем, что регулирование работы автомобиля содержит регулирование одного или более из следующего: график переключения передач в трансмиссии, потребление топлива двигателем и управление стабильностью автомобиля и его поперечным смещением.
13. Способ классификации типа и веса прицепа, буксируемого автомобилем, содержащий шаги, на которых
создают оценку усредненного дорожного градиента для дорожного сегмента, на борту автомобиля, на основе сил контакта колес во время движения автомобиля, причем коэффициент доверия для оценки усредненного дорожного градиента увеличивают в случае увеличения числа поездок по данному дорожному сегменту;
при превышении коэффициентом доверия порогового значения коэффициента доверия определяют характеристики прицепа, присоединенного к автомобилю, на основе оценки усредненного дорожного градиента; и
регулируют работу автомобиля в зависимости от характеристик прицепа.
14. Способ по п. 13, отличающийся тем, что создание оценки усредненного дорожного градиента содержит определение оценки дорожного градиента, определяемого в режиме реального времени, в каждой поездке из числа поездок по данному дорожному сегменту и вычисление статистического среднего значения для каждой оценки дорожного градиента, определяемого в режиме реального времени.
15. Способ по п. 14, отличающийся тем, что дополнительно, если коэффициент доверия меньше порогового значения коэффициента доверия, получают оценку ожидаемого дорожного градиента от сервера, расположенного вне автомобиля, и в данной поездке определяют характеристики прицепа на основе оценки усредненного дорожного градиента относительно оценки дорожного градиента, определяемого в режиме реального времени.
16. Способ по п. 15, отличающийся тем, что определение характеристик прицепа содержит следующее:
во время установившегося движения автомобиля определяют размер прицепа на основе различия между оценкой дорожного градиента, определяемого в режиме реального времени, и оценкой ожидаемого дорожного градиента, причем размер прицепа полагают увеличенным, если оценка дорожного градиента, определяемого в режиме реального времени, превышает оценку ожидаемого дорожного градиента;
во время ускорения автомобиля определяют вес прицепа на основе различия между оценкой дорожного градиента, определяемого в режиме реального времени, и оценкой ожидаемого дорожного градиента, причем вес прицепа полагают увеличенным, если оценка дорожного градиента, определяемого в режиме реального времени, превышает оценку ожидаемого дорожного градиента; и
во время замедления автомобиля определяют размер лобовой части прицепа на основе первого изменения оценки дорожного градиента, определяемого в режиме реального времени, относительно второго изменения оценки ожидаемого дорожного градиента, причем размер лобовой части прицепа полагают увеличенным, если первое изменение превышает второе изменение.
17. Способ по п. 16, отличающийся тем, что регулирование содержит следующее:
задерживают переключение передач в трансмиссии, если размер прицепа увеличен;
задерживают переключение передач в трансмиссии, если вес прицепа превышает пороговое значение веса; и
задерживают переключение передач в трансмиссии, если лобовая часть прицепа имеет размер, превышающий пороговое значение размера.
18. Система для классификации типа и веса прицепа, буксируемого автомобилем, содержащая:
автомобиль с двигателем;
трансмиссию с несколькими комплектами шестерен, выполненную с возможностью соединения двигателя с колесами автомобиля; прицеп, присоединенный к автомобилю;
навигационную систему, соединенную с возможностью обмена данными с указанным автомобилем и с сервером, расположенным вне автомобиля; и
контроллер с машиночитаемыми инструкциями, сохраненными в долговременной памяти для следующего:
во время движения автомобиля по дорожному сегменту,
оценки дорожного градиента, определяемого в режиме реального времени, на основе одного или более из следующего: крутящий момент двигателя, крутящий момент трансмиссии и передаточное отношение;
сравнения дорожного градиента, определяемого в режиме реального времени, с ожидаемым дорожным градиентом, полученным посредством навигационной системы;
выявления одной или нескольких характеристик прицепа на основе указанного сравнения; и
регулирования графика переключения передач в трансмиссии на основе выявленных характеристик.
19. Система по п. 18, отличающаяся тем, что выявление содержит оценку первой массы автомобиля на основе дорожного градиента, определяемого в режиме реального времени, оценку второй массы автомобиля, на основе ожидаемого дорожного градиента, и выявление одной или нескольких характеристик прицепа на основе сравнения первой массы автомобиля относительно второй массы автомобиля, причем одна или несколько характеристик прицепа содержат размер прицепа, вес прицепа и размер лобовой части прицепа.
20. Система по п. 18, отличающаяся тем, что ожидаемый дорожный градиент представляет собой первую оценку ожидаемого дорожного градиента, выполненную вне автомобиля, причем контроллер содержит дополнительные команды для
обновления оценки ожидаемого дорожного градиента, выполненной на борту автомобиля, на основе дорожного градиента, определяемого в режиме реального времени; и
обновление коэффициента доверия для оценки ожидаемого дорожного градиента, выполненной борту автомобиля, на основе нескольких законченных поездок по данному дорожному сегменту.
| US 2013225367 A1, 29.08.2013 | |||
| US 2010211248 A1, 19.08.2010 | |||
| US 2004006421 A1, 08.01.2004 | |||
| US 2002091481 A1, 11.07.2002 | |||
| СПОСОБ И МОДУЛЬ ДЛЯ ОПРЕДЕЛЕНИЯ ОПОРНЫХ ЗНАЧЕНИЙ ДЛЯ СИСТЕМ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2010 |
|
RU2493988C2 |

