Область техники, к которой относится изобретение
Изобретение относится к транспортному средству, содержащему первую часть транспортного средства и вторую часть транспортного средства, при этом первая часть транспортного средства содержит первое ходовое колесо, установленное с возможностью вращения вокруг первой оси вращения, а вторая часть транспортного средства содержит второе ходовое колесо, установленное с возможностью вращения вокруг второй оси вращения. Первое ходовое колесо и второе ходовое колесо имеют одинаковый диаметр ходового колеса, при этом первый подшипник для вращающейся опоры первого ходового колеса и второй подшипник для вращающейся опоры второго колеса соединены один с другим при помощи шарнирного механизма с возможностью изменения ориентации первой оси вращения и второй оси вращения относительно друг друга. Изобретение относится также к части транспортного средства для такого транспортного средства, к системе транспортных средств, содержащей по меньшей мере два таких транспортных средства и к способу трансформации транспортного средства.
Уровень техники
Соответствующие транспортные средства являются известными. Первая ось вращения и вторая ось вращения могут быть расположены последовательно одна за другой, как на велосипеде, или в одной плоскости рядом одна с другой, при этом получается транспортное средство с двумя параллельными колесами. В случае таких транспортных средств с двумя параллельными колесами известны модели, в которых ходовые колеса имеют относительно небольшие размеры, при этом между колесами или над колесами устанавливается платформа для перевозки человека. В других моделях ходовые колеса являются большими и закрывают сбоку пространство для размещения человека, см., например, US 2004 / 0060759 А1 (R. G. McKenzie Hume), US 2004 / 0182625 A1 (А. K. Pal), ЕР 3 025 882 A1 (Shenzhen Zhiyou Battery Integration Technology Co., Ltd.)
Однако такие модели имеют ограниченную область применения. Они часто имеют большое сопротивление воздуху и трению. Кроме того, для их размещения требуется относительно большое место, а их ходовые характеристики не обладают высокой динамичностью, особенно на криволинейных участках дороги.
Раскрытие сущности изобретения
Задача изобретения заключается в том, чтобы обеспечить транспортное средство, которое относится к вышеуказанной области техники, и которое позволяет устранить названные недостатки уровня техники.
Эта задача решена при помощи транспортного средства с признаками, раскрытыми в пункте 1 формулы изобретения. Согласно изобретению транспортное средство выполнено с возможностью плавного переведения при помощи шарнирного механизма из первой транспортной конфигурации с наклонными относительно друг друга первой и второй осью вращения во вторую транспортную конфигурацию с параллельными друг другу первой и второй осью вращения, при этом во второй транспортной конфигурации расстояние от первой контактной поверхности первого ходового колеса до второй контактной поверхности второго колеса составляет менее одной десятой диаметра ходового колеса.
Таким образом, транспортное средство может быть переведено или трансформировано из двухколейной транспортной конфигурации (первая транспортная конфигурация), соответственно, из транспортного средства с двумя параллельными колесами, в одноколейную транспортную конфигурацию (вторая транспортная конфигурация), соответственно, с двумя последовательными колесами. В соответствии с этим получается конструкция, как устойчивая для стоянки и медленного движения, так и динамическая с минимизированным сопротивлением воздуху и движению и динамичной управляемостью для относительно высоких скоростей.
Указанное расстояние относится к расстоянию между внутренними границами контактных поверхностей при эксплуатации транспортного средства с допустимой полезной нагрузкой. В первой транспортной конфигурации угол наклона первой и второй оси вращения относительно друг друга составляет, в частности, по меньшей мере 3°, предпочтительно - по меньшей мере 5°. В одноколейной транспортной конфигурация этот угол составляет менее, чем 2°, предпочтительно - менее, чем 1°. Указанный угол может также иметь небольшую отрицательную величину, т.е. в области контакта обоих ходовых колес с грунтом расстояние между контактными поверхностями обоих ходовых колес меньше, чем в диаметрально противоположной области.
Переход между первой и второй транспортной конфигурацией осуществляется, в частности, бесступенчато, поэтому промежуточные позиции могут быть заняты кратковременно или на относительно длительное время.
Первое ходовое колесо и второе ходовое колесо в первой транспортной конфигурации и/или во второй транспортной конфигурации предпочтительно соприкасаются в области их окружности. Таким образом, транспортное средство стабилизируется, и, кроме того, во второй транспортной конфигурации обеспечивается минимальная ширина эффективной контактной поверхности. В первой транспортной конфигурации ходовые колеса соприкасаются в окружном положении, диаметрально противоположном области контакта с грунтом. Во второй транспортной конфигурации ходовые колеса, напротив, соприкасаются в области контакта с грунтом. Возможны конфигурации, в которых ходовые колеса соприкасаются только в одной из транспортных конфигураций, например, с поворотным шарниром, который расположен в более высокой или более низкой плоскости, чем оси вращения, и конфигурации, в которых ходовые колеса могут соприкасаться в обеих транспортных конфигурациях, например, например, с поворотным шарниром, установленным на высоте оси вращения или с механизмом, который позволяет изменять расстояние между ступицами ходовых колес, например, в случае параллельного кинематического соединения.
В качестве альтернативы ходовые колеса могут не соприкасаться ни в первой, ни во второй транспортной конфигурации.
В одном предпочтительном варианте осуществления первая часть транспортного средства и вторая часть транспортного средства выполнены в виде плоских боковых компонентов, в частности, в виде полуоболочек, которые совместно ограничивают приемное пространство, при этом радиальная протяженность полуоболочек составляет 75-100% диаметра ходового колеса. В приемном пространстве могут быть размещены грузы, предметы и/или люди. С наружной стороны не требуется прикрепления к частям транспортного средства каких-либо компонентов, поэтому обеспечивается компактная конструкция и хорошая аэродинамика. Боковые части, и, в частности, полуоболочки, защищают грузы и/или людей, находящихся в приемном пространстве, от внешних воздействий, например, от дождя или пыли. Если обе полуоболочки во второй транспортной конфигурации могут быть вплотную прижаты друг к другу, и между ними предусмотрено уплотнение, в случае водонепроницаемых полуоболочек образуется плавучее устройство. Если при этом на ходовых колесах предусмотрены подходящие элементы, например, лопасти, транспортное средство может быть также использовано в качестве амфибии.
В этом случае диаметр ходового колеса предпочтительно составляет по меньшей мере 1,2 м, а приемное пространство содержит платформу для размещения по меньшей мере одного человека. Эта платформа может быть выполнена, например, в виде основания для размещения человека в положении стоя, сидя или лежа.
В других вариантах осуществления приемное пространство расположено за пределами боковых компонентов транспортного средства или лишь частично между ними. Так, например, платформа или конструкция может перемещаться двумя (или более) транспортными средствами согласно изобретению, каждое из которых содержит по две части транспортного средства.
Предпочтительно, во время движения транспортного средства может быть осуществлен перевод из первой во вторую транспортную конфигурацию и из второй в первую транспортную конфигурацию. Таким образом, транспортное средство может трогаться с места в первой транспортной конфигурации, а затем при возрастающей скорости осуществляется перевод во вторую транспортную конфигурацию. В случае торможения транспортного средства снова происходит перевод в первую конфигурацию. Таким образом, конфигурация транспортного средства постоянно адаптируется к текущему режиму движения. При этом, в частности, в первой транспортной конфигурации настройка угла наклона может изменяться в зависимости от скорости (и, возможно, от других факторов, как, например, от состояния дороги, температуры или погодных условий).
Перевод между первой транспортной конфигурацией и второй транспортной конфигурацией предпочтительно происходит автоматически в зависимости от скорости движения транспортного средства. Идеальным образом зависимость перехода от соответствующих параметров в первом направлении несколько смещена по сравнению с зависимостью во втором направлении (гистерезис), что позволяет избежать колебаний вперед-назад в области предельных параметров (например, при определенной скорости движения).
Возможны варианты осуществления, в которых перевод запускается и/или регулируется вручную, в частности, в транспортных средствах с ручным приводом или в транспортных средствах для спортивного применения.
В одном предпочтительном варианте осуществления автоматический перевод осуществляется вследствие действующих моментов без дополнительного приложения силы. В результате этого получается особенно простая и компактная конструкция.
В качестве альтернативы для настройки угла наклона предусмотрен двигатель или установочный привод (например, пневматический или гидравлический).
В одном предпочтительном варианте осуществления каждая из частей транспортного средства содержит двигатель с независимым управлением. Это позволяет получить конструкцию с малым количеством механических деталей. Кроме того, такая конструкция обеспечивает симметричное распределение веса.
Рулевое управление в двухрядном режиме (первая транспортная конфигурация) осуществляется, в частности, при помощи разности скоростей между двумя ходовыми колесами.
В однорядном режиме (вторая транспортная конфигурация) при фиксированном механическом соединении колесных модулей рулевое управление осуществляется, в частности, при помощи перемещения центра масс и асимметричных силовых импульсов. При этом может идти речь о перемещении положения водителя и/или о ручном или автоматическом перемещении вращающихся и/или не вращающихся весовых компонентов и/или о гироскопических устройствах транспортного средства. Весовые компоненты могут представлять собой в частности, накопители энергии (батареи), содержащиеся в транспортных средствах с электрическим приводом.
В качестве альтернативы может использоваться только приводной двигатель, а приводное усилие может передаваться к отдельным ведущим колесам, например, при помощи дифференциального механизма.
Указанные двигатели предпочтительно представляют собой электрические двигатели, при этом несущее устройство для размещения грузов (людей и/или товаров) расположено внутри по меньшей мере одного статора двигателя. В результате получается простая конструкция.
Электродвигатели предпочтительно представляют собой моментные двигатели. Они позволяют получать большой вращающий момент при низкой скорости вращения и имеют малое количество механических деталей, благодаря отсутствию отдельного приводного механизма.
Возможно также использование других электродвигателей (с дополнительным приводом или без такового).
В качестве альтернативы возможно применение других видов привода, например, гидравлических двигателей. Возможно также применение гибридных приводов, в которых приводной двигатель объединен с ручным приводным механизмом, а также чисто ручных приводов.
В предпочтительных вариантах осуществления поворотная ось шарнирного механизма расположена на радиальном расстоянии от первой оси вращения и от второй оси вращения, которое составляет по меньшей мере одну треть диаметра ходового колеса, в частности, по меньшей мере 4/10 диаметра ходового колеса. Поворотная ось может представлять собой физическую ось или воображаемую ось, полученную на основании геометрии шарнирного механизма. В последнем случае во время работы ее положение относительно ходовых колес может изменяться.
Поворотная ось может быть расположена, как выше, так и ниже первой и второй оси вращения. Если ходовые колеса ограничивают приемное пространство, то в первом случае его основная часть находится, главным образом, под поворотной осью, а во втором случае - главным образом, над поворотной осью. Расположение поворотной оси в верхней части транспортного средства позволяет получать особенно хорошую устойчивость в первой транспортной конфигурации.
В первой группе предпочтительных вариантов осуществления шарнирный механизм является параллельным кинематическим. Это обеспечивает высокую гибкость в отношении эксплуатации и использования пространства между частями транспортного средства, а также малый вес механической конструкции. Элементы параллельного кинематического соединения могут непосредственно соединять обе части транспортного средства, например, стержень может проходить между двумя шарнирами, каждый из которых прикреплен к одной из частей транспортного средства. В этом случае подходящее параллельное кинематическое соединение может быть получено, например, с 2×3 пневматическими цилиндрами.
Элементы параллельного кинематического соединения могут также проходить между одной из частей транспортного средства и центральным элементом. Этот центральный элемент может быть выполнен, в частности, в виде приемного корпуса. Может быть также предусмотрено несколько центральных элементов, при этом с обеих сторон соответствующий крайний снаружи из этих элементов посредством элементов параллельного кинематического соединения соединен с частями транспортного средства. Между этими центральными элементами может быть, например, закреплена платформа для приема людей и/или товаров. Все или некоторые из элементов могут быть выполнены, например, в виде пневматических цилиндров. Управление ими осуществляется, в частности, при помощи компьютера.
Во второй группе предпочтительных вариантов осуществления шарнирный механизм представляет собой последовательное кинематическое соединение. Это обеспечивает простое управление и простую механическую конструкцию. Так, шарнирный механизм может быть образован, например, шарниром (определяющим поворотную ось) и двумя пневматическими цилиндрами.
Транспортное средство может включать в себя опорный узел, который соединен с первой и второй частью транспортного средства и содержит по меньшей мере одну дополнительную платформу для контакта с грунтом. Соединение может осуществляться непосредственно с соответствующей частью транспортного средства или опосредованно, например, посредством крепления к соответствующей другой части транспортного средства, а этой другой части транспортного средства - к поворотному механизму. Опорный узел содержит, в частности, дополнительное колесо для контакта с грунтом, а именно, пассивное колесо. Однако могут быть также реализованы опорные узлы, которые содержат только полозья или опорную платформу и используются, главным образом, для стоянки транспортного средства.
Как поясняется ниже, части транспортного средства во многих вариантах применения могут использоваться в виде модулей и могут объединяться друг с другом. Поэтому изобретение относится также к отдельным частям транспортного средства (колесным модулям). Они содержат одно ходовое колесо, установленное с возможностью вращения вокруг оси, привод для ходового колеса и соединительный элемент для шарнирного механизма. Кроме того, они могут содержать дополнительные компоненты, а именно, приводные компоненты (например, электродвигатели).
Несколько транспортных средств согласно изобретению - что также поясняется ниже - могут быть соединены для временного или постоянного использования. При этом соответствующая система транспортных средств содержит по меньшей мере два транспортных средства согласно изобретению, которые механически соединены один с другим, в частности, с возможностью отсоединения. Таким образом, транспортные средства служат в качестве базового модуля, при этом несколько базовых модулей могут быть гибко объединены один с другим. При постоянном соединении обеспечивается снижение затрат на производство вследствие уменьшения количества различных конструктивных узлов. Временные соединения расширяют возможности применения.
В одном предпочтительном варианте осуществления по меньшей мере два транспортных средства соединены один с другим при помощи соединительной части, при этом указанная соединительная часть образует приемное пространство для размещения грузов (товаров и/или людей).
Дальнейшие предпочтительные варианты осуществления и комбинации признаков изобретения следуют из приведенного ниже подробного описания и совокупной формулы изобретения.
Краткое описание чертежей
На чертежах, используемых для пояснения вариантов осуществления изобретения, показаны:
ФИГ. 1 - вид спереди параллельного кинематического базового модуля с возможными дополнительными модулями и приложениями с угловым положением I колес;
ФИГ. 2 - вид сбоку двух последовательно кинематически соединенных и расположенных последовательно один за другим базовых модулей одинаковой величины;
ФИГ. 3 - вид сзади последовательного кинематического базового модуля;
ФИГ. 4 - вид сбоку и спереди в пространстве последовательного кинематического базового модуля;
ФИГ. 5 - вид спереди последовательного кинематического базового модуля с угловым положением А колес;
ФИГ. 6 - вид спереди последовательного кинематического базового модуля с угловым положением V колес;
ФИГ. 7 - вид сверху последовательного кинематического базового модуля с угловым положением V колес;
ФИГ. 8 - вид спереди любого кинематического или параллельного кинематического базового модуля с угловым положением I колес; и
ФИГ. 9 - два параллельно соединенных и последовательно расположенных один за другим базовых модуля различной величины.
Одинаковые детали обозначены на чертежах, как правило, одинаковыми ссылочными номерами.
Осуществление изобретения
Устройство представлено в виде вариантов осуществления согласно ФИГ. 1-9. При этом конструктивные элементы, которые относятся к изобретению, показаны только символически. Электрические, гидравлические и/или пневматические соединения не представлены.
Сплошные толстые линии относятся к отдельным конструктивным элементам, сплошные тонкие линии представляют собой вспомогательные и ссылочные линии, штриховыми линиями показаны невидимые части соответствующих конструктивных элементов, пунктирные линии показывают положения, дополнения, варианты или модули, а штрихпунктирные линии -системы координат, оси вращения и симметрии, траектории движения, многократные изображения и параллельные кинематические устройства.
Параллельные кинематические устройства 17 с параллельными кинематическими платформами 18 представлены символически в виде штрихпунктирных линий с линейными прямоугольными ограничениями, параллельные кинематические линейные устройства - в виде штрихпунктирных линий, а параллельные кинематические шарниры 19 - в виде круга.
На ФИГ. 1 представлен вид спереди параллельного кинематического базового модуля 16, называемого далее также грузовым корпусом 11, для передвижения по меньшей мере одного человека 9 и/или одного предмета 10, с возможными дополнительными модулями и приложениями с угловым положением I колес. Ось Y базового модуля 16 соответствует оси 20 симметрии. Устройство 21 соединения статоров состоит из двух параллельных кинематических устройств 17, каждое из которых содержит внутреннюю и наружную кольцеобразные параллельные кинематические платформы 18. Внутренние параллельные кинематические платформы 18 жестко соединены друг с другом при помощи распорного устройства 22 статоров или кинематически при помощи по меньшей мере одного дополнительного поворотного устройства 23 статора. Распорное устройство 22 статоров состоит из одного или нескольких прочных сферических центральных распорных сегментов 24 статора и/или из одного или нескольких прочных сферических и/или одного или нескольких дверных устройств 25, установленных с возможностью поворота вокруг общей оси X 3, и из одного или нескольких боковых распорных сегментов 24 статора. Грузовой корпус 11 через грузовое несущее устройство 26, содержащее с двух сторон внутренние параллельные кинематические платформы 18, при помощи линейных кинематических устройств 27 соединен с запирающими устройствами 28 шаровых шарниров. Наружные параллельные кинематические платформы 18 с обеих сторон соединены с соответствующим статором 29 бесподшипникового моментного двигателя 30 с полым валом. Соединительное устройство 31 роторов состоит из неподвижных стоек 32 и/или из роторных стоек 35, положение которых может зависеть или не зависеть от радиального положения колесного модуля 33, которые соединены с возможностью поворота вокруг оси 34 роторных стоек, и которые соединяют ротор 36 с колесным диском 37 и с колесной шиной 38. Несколько накопителей 39 энергии в центральной части соединены с возможностью поворота один за другим вокруг оси X устройства 21 соединения статоров.
Несколько накопителей 39 энергии могут быть выполнены в виде модуля 40 соединения с грунтом, содержащего устройство 52 сцепления и удлиненное опорное устройство 53 накопления энергии, которое служит для отслеживания ветра и солнца, с устройством 54 соединения с грунтом или без такового могут использоваться в качестве подвижного опорного устройства на ровном или неровном рельефе грунта.
В качестве дополнительных приложений в виде дополнительных модулей представлены устройство для передвижения с одним колесным модулем в качестве одноколесного транспортного средства, модуль 40 соединения с грунтом с дополнительной функцией следящего устройства 41, несколько тяговых устройств 42 и крыльевые устройства 43 (устройства с несущей поверхностью).
На ФИГ. 2 с использованием оси симметрии представлен вид сбоку с угловым положением I колес двух последовательно кинематически соединенных и расположенных последовательно один за другим базовых модулей 16 с дополнительными модулями, которые параллельно кинематически или любым образом соединены один с другим посредством соединительного устройства 44 базовых модулей, называемого также базовым соединительным модулем 45 или паланкином 46, с кинематической аэродинамической соединительной оболочкой 47 и временным вспомогательным колесом 48. При этом можно видеть накопители 39 энергии, присоединенные сбоку с возможностью поворота вокруг локальных осей X колесных модулей 33. На чертеже показан символический вид сбоку параллельного кинематического соединительного устройства. Паланкин 46 в качестве дополнительного модуля в зависимости от цели применения в случае долговременно открытых колесных модулей 33 может быть соединен с центральной частью внутри колесных модулей 33, и/или через наружную сторону базового модуля 16, а при использовании двигателя с полым валом - внутри статоров 29 непосредственно с грузовым корпусом 11 или опосредованно и/или с боковой стороны снаружи от колесных модулей 33 посредством по меньшей мере одного статора 29, фиксированно или подвижно по меньшей мере с одним базовым модулем 16 кратковременно, например, при помощи быстроразъемных соединений, или на длительное время. При временном соединении паланкин 46 может также перемещаться только с одним базовым модулем 16 при помощи по меньшей мере одного вспомогательного колеса 48 или любого вращающегося устройства 14. В качестве других дополнительных модулей представлены два одноосных устройства, установленных с возможностью поворота вперед и/или назад вокруг общей оси X 3, в виде одноколесных прицепных устройств 49, каждое из которых содержит вспомогательное колесо 48 или любое вращающееся устройство 14 спереди и сзади. Вспомогательные колеса 48 подвижно или фиксированно посредством соединительного устройства 44 базовых модулей или непосредственно соединены с базовым модулем 16.
Вспомогательные колеса 48 могут касаться или не касаться грунта 12. Для регулирования угла 97 поперечного крена паланкин 46 может содержать по меньшей мере один накопитель 39 энергии, установленный с возможностью поворота вокруг оси 130 накопителя энергии. Колесный диск 37 и колесная шина 38 на этом чертеже показаны в виде по меньшей мере шести сегментов 50 колесного диска и сегментов 51 колесной шины по меньшей мере с двумя линейными кинематическими устройствами 27 на один сегмент колесной шины 51, выполняющими функцию стоек 32. Соединение сегментов 50 колесного диска с сегментами 51 колесной шины, а также соединение линейных кинематических устройств 27 с ротором 36 и сегментами 50 колесного диска осуществляется при помощи шарниров 131 колесного диска, имеющих по меньшей мере одну степень свободы. Благодаря этому, при соответствующей радиальной ориентации колесных модулей 33 относительно друг друга, можно по мере необходимости автоматически уменьшать объем колесного диска. Это осуществляется путем соответствующего изменения линейных положений линейных кинематических устройств, связанных с шарнирами 131 колесного диска, имеющими ограниченные степени свободы, при этом линейные положения противоположных линейных кинематических устройств 27 являются не идентичными. В случае применения более, чем двух линейных кинематических устройств 27, например, при параллельном кинематическом соединении стоек, сегменты 50 колесного диска могут отсоединяться друг от друга при помощи быстроразъемных соединений. Кинематическое соединение колесного диска позволяет использовать, в частности, автоматический механизм уборки с целью уменьшения объема колесного диска 37, некруглую геометрию колесного диска для передвижения по неровной поверхности грунта аналогично гусеничному ходу или для автоматической разборки устройства.
На ФИГ. 3 представлен вид сзади в разрезе по линии А-А последовательного кинематического базового модуля 16 с угловым положением А колес, с боковыми накопителями 39 энергии, установленными с возможностью поворота вокруг локальной оси X колесных модулей 33, для передвижения одного человека 9.
На ФИГ. 4 представлен вид сбоку спереди последовательного кинематического базового модуля 16 для передвижения одного человека 9 в пространстве.
На ФИГ. 5 представлен вид спереди последовательного кинематического базового модуля 16 с угловым положением А колес, с центральным устройством 54 соединения с грунтом и с дополнительной функцией в виде следящего устройства 41 для использования солнечной и ветровой энергии.
ФИГ. 6 представлен вид спереди последовательного кинематического базового модуля 16 с угловым положением V колес.
ФИГ. 7 представлен вид сверху последовательного кинематического базового модуля 16 с угловым положением V колес, с главной соединительной осью 55 и двумя боковыми соединительными осями 56, которые при параллельном расположении колесных модулей 33 являются параллельными друг другу, а во время трансформации путем подтягивания одного или двух сдвигающих устройств 57 в противоположном направлении проходят не параллельно друг другу.
На ФИГ. 8 представлен вид спереди любого кинематического или параллельного кинематического базового модуля 16 с угловым положением I колес. На чертеже символически показано несколько сгруппированных и встроенных конструктивных вариантов параллельных кинематических устройств 17 для эксплуатации базового модуля 16, а также два параллельных кинематических устройства 17 с радиусом действия вокруг общей оси X 3, составляющим 360°, для выполнения любых работ. В качестве дополнительного модуля представлено присоединенное сбоку устройство 54 соединения с грунтом для соединения двух базовых модулей 16 с дополнительной функцией в виде следящего устройства 41.
На ФИГ. 9 представлено устройство с двумя параллельными кинематическими базовыми модулями 16 различной величины с паланкином 46. Паланкин 46 через неподвижные соединения 99 со статором при помощи быстроразъемных соединений соединен непосредственно с внутренней параллельной кинематической платформой 18 базовых модулей 46 и может автоматически отстыковываться или пристыковываться, а при помощи вспомогательных колес 48 может также передвигаться только с базовым модулем 16. Ниже приведено описание терминов и функций.
Геометрия
В отличие от последовательного соединения двух вращающихся устройств 14, расположенных одно за другим, как, например, в традиционном велосипеде или мотоцикле с геометрией рулевого управления и с кинематической цепью, два вращающихся устройства 14 в настоящем изобретении установлены параллельно рядом друг с другом.
Общая система 1 координат базового модуля 16 определяется в исходном угловом положении осью X в виде оси 59 вращения вращающихся устройств 14, осью Y в виде оси симметрии, перпендикулярной силе 58 тяжести, и осью Z в виде направления поступательного движения по грунту 12.
Локальные системы 2 координат вращающихся устройств 14 определяются в исходном угловом положении осью X в виде оси 59 вращения, осью Y, перпендикулярной оси 59 вращения, и осью Z в виде направления поступательного движения по грунту 12.
Конструкция/функционирование
Транспортное средство состоит по меньшей мере из одного базового модуля 16 по меньшей мере с двумя активными или пассивными вращающимися устройствами 14, называемыми далее также колесными модулями 33, статоры 29 которых непосредственно и/или опосредованно соединены один с другим по меньшей мере одним любым последовательным кинематическим, параллельным кинематическим и/или любым кинематическим устройством 21 соединения статоров.
Колесные модули 33 могут быть, в принципе, механически соединены друг с другом снаружи и/или изнутри. В результате внутреннего соединения колесных модулей 33 образуется замкнутая система передвижения.
Устройство 21 соединения статоров может непосредственно и/или опосредованно при помощи по меньшей мере одного распорного устройства 22 статоров соединять статоры 29 друг с другом.
Устройство 21 соединения статоров может также непосредственно и/или опосредованно при помощи любого распорного устройства 22 статоров и/или грузового несущего устройства 26 соединять статоры 29 с грузовым корпусом 11.
Распорное устройство 22 статоров обеспечивает, как радиус доступа в пределах 360° вокруг общей оси X со стороны грузового корпуса 11 к базовому модулю 16, так и радиус действия 360° вокруг общей оси X 3 для выполнения любых работ с грузовым корпусом 11 внутри и/или снаружи базового модуля 16. Грузовой корпус 11 может быть больше или меньше, чем устройство.
Активный базовый модуль / приводные устройства / двигатели
Активный базовый модуль 16 состоит по меньшей мере из двух активных вращающихся устройств 14. Одно активное вращающееся устройство 14, называемое далее также двигателем 60 или приводным устройством 61, состоит по меньшей мере из одного статора 29 и по меньшей мере из одного ротора 36, который активно непосредственно или опосредованно приводится во вращение вокруг оси 59 вращения при помощи любого подшипникового устройства.
Ротор 36 при помощи любого роторного соединительного устройства 31, называемого далее также стойками 32, роторными стойками 35, оболочками 62 роторов, сплошными оболочками 63 роторов или сегментами 64 оболочек роторов через колесный диск 37 соединяется с колесной шиной 38 и грунтом 12. Они совместно образуют активный колесный модуль 33.
Базовый модуль 16 может также содержать колесные модули 33 с некруглой геометрической формой колесного диска 37, сегментов 50 колесного диска, или может не содержать колесного диска 37.
Активные вращающиеся устройства 14 могут состоять из простых приводных систем, в частности, из бесподшипниковых электрических, гидравлических или пневматических моментных двигателей 30 с полым валом в качестве статора 29, питаемых от сетевых накопителей 39 энергии с системой обратной связи по энергии, и/или из гибридных приводных систем, объединенных, например, с ручным приводом всем телом, и/или из мультигибридных приводных систем, которые для локальной выработки энергии дополнительно используют солнечную и/или ветровую энергию и содержат устройства 65 превращения энергии.
Моментный двигатель
В представленных вариантах осуществления в качестве приводных устройств 61 используются моментные двигатели 30 с прямым приводом, без подшипников или с любыми подшипниками и с полым валом, в виде электродвигателей с внешним ротором. При применении электрического бесподшипникового моментного двигателя 30 статор 29 соединяется с ротором 36 посредством бесконтактного магнитного подшипникового устройства 66 с приводными элементами 67 на базе постоянных магнитов и/или электромагнитов. Двигатели 60 могут быть выполнены водонепроницаемыми и/или нечувствительными к действию воды и электрически экранированными. Приводные элементы 67 выполняют функцию приводного устройства 61 и подшипникового устройства 68 и расположены параллельно по кругу и под углом 45° вокруг локальной оси X. Импульсы энергии от статора 29 к ротору 36 при положительном ускорении и от ротора 36 к статору 29 при отрицательном ускорении для рекуперации энергии могут передаваться на приводные элементы 67 в виде электрического преобразования импульсов в отношении 1/1 без преобразования до соответствующего целочисленного делителя приводных элементов и в отношении 1/Х с максимальным преобразованием. Полый вал позволяет, в частности, осуществлять любое механическое соединение любого устройства с боковой стороны базового модуля 16 внутри статора 29 с грузовым несущим устройством 26, внутренней параллельной кинематической платформой 18 и/или непосредственно с грузовым корпусом 11. Таким образом, при соответствующем диаметре колесного модуля 33 возможен также доступ с боковой стороны к грузовому несущему устройству 26 для грузового корпуса 11 или людей 9.
Ручной привод всем телом
Ручной привод всем телом может быть осуществлен, в частности, в виде стационарного ходового устройства, которое непосредственно или опосредованно преобразует энергию биомеханического цикла перемещения рук и ног при естественных движениях во время ходьбы и/или бега, передаваемую на приводные устройства. Привод всем телом может состоять из четырех параллельных кинематических гидравлических и/или пневматических приводных устройств для рук и ног, связанных с устройством 21 соединения статоров, которые передают энергию с увеличением или уменьшением при помощи гидравлической распределительной системы в различных радиальных положениях непосредственно на гидравлические или пневматические моментные двигатели 30. В случае гидравлических или пневматических моментных двигателей 30 привод может также содержать дополнительное централизованное приводное устройство в виде гидравлического или пневматического насосного устройства для гибридного привода. Дифференциальное распределение объема масла или воздуха, подаваемого к моментным двигателям 30 при помощи соответствующей клапанной системы, позволяет осуществлять точное рулевое управление, привод и рекуперацию энергии устройства. Три степени свободы параллельных кинематических платформ позволяют интуитивно, как вручную приводить в действие и управлять процессом трансформации, так и обеспечивать рулевое управление базовым модулем 16 при помощи соответствующего гидравлического и/или электрического клапанного регулятора и/или усилителя без дополнительного электронного управления.
Пассивный базовый модуль
Пассивный базовый модуль состоит по меньшей мере из двух пассивных вращающихся устройств. Пассивное вращающееся устройство состоит по меньшей мере из одной неподвижной части и одной части, вращающейся вокруг оси 59 вращения, которые соединены при помощи любого подшипникового устройства.
Пассивные вращающиеся устройства могут приводиться в действие, например, любыми приводными устройствами через грунт 12, как при применении в комбинации с другим устройством согласно изобретению, так и при использовании в качестве устройства переднего колеса в традиционном мотоцикле с вращающимися устройствами, расположенными последовательно одно за другим.
Последовательное кинематическое устройство соединения статоров
В базовом модуле 16 по меньшей мере с одним последовательным кинематическим устройством 21 соединения статоров, представленным на ФИГ. 2, 3, 4, 5, 6, и 7, оба колесных модуля 33 иерархически соединены с устройством 21 соединения статоров.
Базовый модуль 16 с последовательным кинематическим устройством 21 соединения статоров называется также последовательным кинематическим базовым модулем 16. Последовательный кинематический базовый модуль 16 может состоять из одного, двух, трех или более установленных друг на друга и/или вставленных друг в друга последовательных кинематических устройства.
Грузовой корпус 11 через грузовое несущее устройство 26 в виде подвесного устройства фиксированно или кинематически посредством шарнирного устройства 69 соединен с главным соединительным валом 70 на главной соединительной оси 71. Переднее удлиненное сдвигающее устройство 73 в виде рычага 72 управления и заднее сдвигающее устройство 74, содержащее по меньшей мере одну левую сдвигающую ножку 75 и одну правую сдвигающую ножку 76, соединяют обе боковых соединительных оси 56 с главной соединительной осью 55 через шарнирное устройство по меньшей мере с одной степенью свободы.
Главная соединительная ось 55 образует точку поворота сдвигающих ножек 76. Обе боковые соединительные оси 56 сдвигающих устройств 74 при помощи линейного кинематического устройства 27, называемого далее также цилиндрическим устройством 77 с дополнительной функцией амортизатора 78, непосредственно соединены друг с другом через шаровые шарниры 79.
Каждый колесный модуль 33 через верхнее последовательное кинематическое соединительное устройство 80 соединен через нижнее линейное кинематическое устройство 27 с грузовым несущим устройством 26 с возможностью поворота вокруг боковых соединительных осей 56. Такое геометрическое расположение колесного модуля 33 соответствует трехточечному соединению.
Каждый статор 29 непосредственно или по меньшей мере через одну статорную стойку 81 при помощи шаровых шарниров 79 соединен с грузовым несущим устройством 26 с возможностью поворота вокруг боковой соединительной оси 56.
Параллельное кинематическое устройство соединения статоров
В базовом модуле 16 по меньшей мере с одним параллельным кинематическим устройством 21 соединения статоров статоры 29 соединены друг с другом при помощи по меньшей мере одного параллельного кинематического устройства непосредственно и/или посредством любого устройства 21 соединения статоров.
Базовый модуль 16 с параллельным кинематическим устройством 21 соединения статоров, как символически представлено на ФИГ. 1, 2 и 8, называется далее также параллельным кинематическим базовым модулем 16. Параллельный кинематический базовый модуль 16, как представлено на ФИГ. 8, может состоять, например, из одного, двух, трех или более установленных друг на друга параллельных кинематических устройств 21 соединения статоров и по меньшей мере одного встроенного параллельного кинематического устройства 17 для выполнения любых работ.
Параллельное кинематическое устройство состоит по меньшей мере из двух параллельных кинематических платформ 18, которые при помощи по меньшей мере трех любых кинематических устройств, в частности, линейных кинематических устройств 27, соединены друг с другом при помощи любых шарнирных соединений, в частности, запирающих устройств 28 шаровых шарниров. Линейные кинематические устройства 27 могут состоять, например, из линейных электрических, гидравлических и/или пневматических кинематических устройств. В гексаподе 82 параллельное кинематическое устройство 17 состоит из шести линейных кинематических устройств 27.
В параллельном кинематическом варианте осуществления, показанном на ФИГ. 1, параллельный кинематический базовый модуль 16 представлен с двумя параллельными кинематическими устройствами 17. Две внутренние параллельные кинематические платформы 18 фиксированно соединены с устройством 21 соединения статоров и соответствуют общей оси Y. Дополнительное поворотное устройство 83 по меньшей мере в одной степени свободы, следуя также за поворотным устройством 84 платформ, позволяет изменять угол между двумя внутренними параллельными кинематическими платформами 18.
Параллельные кинематические платформы 18 при помощи запирающего устройства 28 шарового шарнира с несколькими степенями свободы соединены с линейными кинематическими устройствами 27. При этом к каждой стороне по меньшей мере одной из параллельных кинематических платформ 18 непосредственно или опосредованно по меньшей мере через один статор 29 присоединено по меньшей мере одно вращающееся устройство 14. Система координат наружной параллельной кинематической платформы 18 может соответствовать локальной системе координат вращающегося устройства 14.
Далее параллельный кинематический базовый модуль 16 служит в качестве эталонного устройства для описания.
Модульное вложение / механическая сеть
В зависимости от области применения устройство может быть расширено при помощи любых модулей, больших и/или меньших, чем базовый модуль 16. Колесные модули 33 и устройства 21 соединения статоров в зависимости от области применения могут состоять из одного или нескольких любых вставленных друг в друга и/или установленных друг на друга, сцепленных и/или любых двух- или трехмерных модулей, образующих сетчатую структуру, с любыми последовательными и/или параллельными кинематическими соединениями, с целью комбинаций различных функций в минимальном пространстве. Принцип вложения друг в друга и/или наложения друг на друга модулей, образующих сетчатую структуру, можно сравнить со строением молекулярной структуры. Один или несколько базовых модулей 16 могут иметь любые ручные и/или автоматические соединения с такими же или любыми другими модулями и/или любыми устройствами внутри или снаружи базового модуля 16. Устройство может также содержать одно или несколько одинаковых и/или различных устройств 21 соединения статоров.
Передвижение / способ торможения на грунте / рекуперация энергии
Движение базового модуля 16 по грунту 12 осуществляется за счет положительного или отрицательного ускорения или постоянной скорости приводных устройств 61. В случае прямолинейного передвижения скорости приводных устройств являются идентичными. При изменении направления скорости могут изменяться по-разному. Дифференциальный способ передвижения может быть частью способа рулевого управления.
Отрицательное ускорение устройства в качестве способа торможения может создаваться механически, например, тормозными устройствами при помощи гидравлических дисковых тормозов и/или систем рекуперации энергии с использованием двигателей 60 в функции генераторов 85.
Способ рулевого управления с бесконтактным или скользящим соединением колесных дисков
Для сохранения полосы движения и изменения направления движения устройство позволяет применять несколько различных способов рулевого управления базового модуля 16 при передвижении по грунту 12. В зависимости от области применения для рулевого управления могут быть использованы один или несколько способов рулевого управления в сочетании.
При наклонном положении колес без соединения и/или с точечным или поверхностным соединением двух колесных шин 38, колесных дисков 37 и/или колесных модулей 33 рулевое управление может быть осуществлено одним или несколькими следующими способами.
Способ рулевого управления может быть реализован в виде составной части способа ускорения и торможения с использованием дифференциальных значений ускорения двух колесных модулей 33 и может осуществляться механически, гидравлически, пневматически и/или электрически при помощи устройства рулевого управления и/или как электронный процесс в виде положительного, отрицательного или нулевого ускорения. Способ торможения путем отрицательного ускорения может представлять собой рекуперацию энергии и/или механический способ торможения. Инерция способа рулевого управления зависит от гироскопического эффекта, создаваемого скоростью вращения, а также от углового положения колес, которое оказывает влияние на величину усилия рычага колесных модулей 33 относительно общей оси Y 4.
Для параллельного кинематического базового модуля 16 или базового модуля 16 с соответствующей последовательной кинематической геометрией способ рулевого управления может осуществляться путем поворота колесных модулей 33 вокруг локальных осей Y с соответствующей корректировкой пути следования. При корректировке пути следования локальные оси X больше не находятся на одной высоте. Два колесных модуля 33 смещаются вдоль общей оси Z один за другим с различными углами относительно локальных осей Y, в результате чего под действием рулевого управления возникает траектория движения с соответствующим соотношением углов поворота управляемых колес.
Этот процесс рулевого управления, как и процесс трансформации базового модуля 16 можно сравнить с изменением направления лыжни при движении на лыжах. При этом продольные оси двух лыж соответствуют локальным осям Z колесных модулей 33 и, таким образом, направлению движения при параллельном положении колесных модулей 33 относительно оси Y. При параллельном положении колесных модулей 33 относительно оси Y угол 86 волочения соответствует 0°. Касание грунта лыжами соответствует точкам 87 касания грунта колесной шиной 38. Процесс трансформации может происходить на грунте плавно или ступенчато.
Способ рулевого управления с фиксированным соединением колесных дисков
При угловом положении колес с фиксированным поверхностным соединением двух колесных шин 38, колесных дисков и/или колесных модулей 33, как, например, в случае углового положения I колес в водонепроницаемом базовом модуле 16, или в случае углового положения V колес процесс рулевого управления может быть осуществлен одним или несколькими следующими способами.
Процесс рулевого управления может осуществляться при помощи любых гироскопических устройств, путем изменения положения сегментов 88 накопителей энергии в качестве эксцентриковых устройств 89 для использования центробежных и центростремительных сил, которые в зависимости от радиального положения колесного модуля 33 вдоль эксцентриковой оси 90 кинематически соединены со стойками 32, или при помощи импульсов ручной и/или кинематической толкающей и/или тянущей силы со стороны накопителей 39 энергии, соединенных сбоку со статором 29 с возможностью поворота вокруг локальной оси X 6, действующих на рычаг общей оси X 3 относительно общей оси Y 4 и/или на рычаг 91 управления сдвигающего устройства относительно общей оси Y 4.
При движении с герметично закрытым базовым модулем 16 и/или с герметичным устройством 21 соединения статоров и любым открытым базовым модулем 16 в определенной среде, например, в воде и/или при движении в плавучем положении по воде с вертикальной общей осью Y 4 и низким центром тяжести процесс рулевого управления может осуществляться при помощи дифференциальных изменений радиальных положений стоек колесных модулей 33 относительно продольной оси 92 стоек.
Способы рулевого управления с фиксированно соединенными колесными модулями 33 могут быть также использованы в случае свободных колесных модулей.
При наличии по меньшей мере одного дополнительного, последовательно расположенного колесного модуля 33 процесс рулевого управления может осуществляться при помощи традиционной геометрии рулевого управления с кинематической цепью.
Трансформация / способ волочения / угол наклона колес
Способ волочения (подтягивания) является предметом настоящего изобретения и описывает процесс трансформации устройства с целью изменения формы, функции и свойств устройства во время его движения. В вариантах осуществления, показанных на ФИГ. 1 и 3-7, трансформация базового модуля 16 осуществляется из параллельного двухколесного транспортного средства в одноколесное транспортное средство и/или из одноколесного транспортного средства в параллельное двухколесное транспортное средство. Согласно ФИГ. 2 трансформация осуществляется в виде синхронизированной трансформации двух базовых модулей 16 с соединительным устройством 44 базовых модулей из традиционного четырехколесного транспортного средства в традиционное двухколесное транспортное средство и/или из традиционного двухколесного транспортного средства в традиционное четырехколесное транспортное средство. При трансформации только одного базового модуля 16 происходит трансформация из трехколесного транспортного средства в двухколесное транспортное средство и/или из двухколесного транспортного средства в трехколесное транспортное средство.
Угол 93 наклона колес с центром 94 углового поворота колес описывает угол и положение локальных осей Y 7 колесных модулей 33 относительно общей оси Y 4 и/или направления силы 58 тяжести. Центром 94 углового поворота колес при последовательном кинематическом соединении может быть боковая соединительная ось 56. При параллельном кинематическом соединении центр 94 углового поворота колес может представлять собой нулевую точку 2 локальной системы координат колесного модуля 33 или любое положение параллельного кинематического рабочего диапазона. Угол 93 наклона колес может быть изменен во время движения путем изменения угла 86 волочения, теоретического угла и положения локальных осей Z 8 колесных модулей 33 относительно общей оси Z 5 и, например, путем ручного кинематически пассивного способа волочения по грунту 12, и/или подвергаться воздействию в процессе осуществления активного способа волочения при помощи любого кинематически автоматизированного устройства, которое моделирует пропорционально скорости движения зависимый алгоритм движения с целью 5 трансформации, например, из двухколесного транспортного средства в одноколесное транспортное средство.
Трансформация осуществляется путем создания небольшой непараллельности относительно друг друга колесных модулей 33 и их осей Y при помощи параллельного и/или последовательного кинематического соединения устройства 21 соединения статоров. В случае последовательного кинематического соединения изменяется передний и/или задний угол сдвигающих устройств 57. При этом нежнее линейное кинематическое устройство 27 определяет расстояние между колесными модулями 33 и в зависимости от скорости движения - продолжительность процесса трансформации. При параллельном кинематическом соединении наружные параллельные кинематические платформы располагаются соответствующим образом. За счет передвижения по грунту 12 возникает кратковременный процесс волочения, следствием которого является увеличение или уменьшение колеи.
Вращающееся устройства 14 во время движения под действием процесса волочения могут соприкасаться в точке по касательной, а в случае изгиба роторного соединительного устройства 31 в направлении общей нулевой точки 1 - по поверхности или в точке по касательной и/или могут быть временно зафиксированы и/или динамически соединены один с другим при помощи любого соединительного устройства.
Последовательный кинематический способ волочения
При последовательном кинематическом способе волочения для изменения угла 93 наклона колес колесные модули в процессе волочения пассивно перемещаются вокруг локальных осей Y 7. В случае применения гидравлического цилиндра 95 в качестве нижнего линейного кинематического устройства 27 открывается подача масла через клапанную систему и, таким образом, обеспечивается возможность процесса волочения. При достижении требуемого угла наклона колес подача масла прекращается.
Параллельный кинематический способ волочения
Способ волочения с последовательным кинематическим устройством 21 соединения статоров может быть также использован в случае параллельного кинематического устройства 21 соединения статоров, например, при параллельном кинематическом соединении с гидравлическим ручным управлением путем управления гидравлическими клапанами при помощи дисковых кулачков или электронным способом при помощи соответствующих алгоритмов.
Опорные положения угла наклона колес / гироскопический эффект / самостабилизация
Устройство в результате процесса трансформации может иметь геометрически различные опорные угловые положения, а также занимать любые положения в пределах кинематической области действия. При этом возможны различные расположения и угловые положения колесных модулей 33 относительно общей оси Y 4. Опорные положения углов геометрического расположения колесных модулей 33 при идентичных углах 93 наклона колес называются далее угловыми положениями колес.
Время трансформации зависит, в частности, от силы гироскопического эффекта, называемого также эффектом закручивания. Гироскопический эффект описывает самостабилизацию массы устройства, вращающегося вокруг локальной оси X 6. Сила этого эффекта зависит, в частности, от скорости вращения колесных модулей 33 и радиального распределения массы. В настоящем устройстве расположение массы, например, в виде накопителей энергии и/или сегментов 88 накопителей энергии, может быть изменено во время вращения колесных модулей.
Угловое положение А колес представляет базовый модуль 16 с положительным углом 93 наклона колес в виде двухколесного транспортного средства, стоящего на месте или медленно передвигающегося со скоростью, не превышающей скорость самостабилизации устройства.
Угловое положение Н колес представляет базовый модуль 16 с углом наклона 93 колес, равным 0°, стоящий на месте или медленно передвигающийся со скоростью, не превышающей скорость самостабилизации устройства. Угловое положение Н колес соответствует такому положению колесных модулей 33, в котором вследствие расстояния между колесными модулями 33 локальные оси X 6 открытого базового модуля 16 проходят параллельно грунту. Локальные оси Y 7 проходят перпендикулярно грунту и имеют направление, противоположное направлению силы тяжести. Локальные оси Z 8 и локальные оси Y 7 проходят параллельно друг другу. Локальные оси X 6 соответствуют общей оси X 3 базового модуля 16.
Угловое положение V колес представляет базовый модуль 16 с отрицательным углом 93 наклона колес при нефиксированном соединении колесных модулей 33 в виде дифференциально управляемого двухколесного транспортного средства или при нефиксированном точечном соединении колесных модулей 33 с кинематическими характеристиками одноколесного транспортного средства, начиная от скорости самостабилизации устройства.
Угловое положение I колес представляет базовый модуль 16 с углом 93 наклона колес, равным 0°, при нефиксированном соединении колесных модулей 33 в виде дифференциально управляемого двухколесного транспортного средства или при фиксированном поверхностном соединении колесных модулей 33 с кинематическими характеристиками одноколесного транспортного средства, начиная от скорости самостабилизации устройства. Поверхностное фиксированное соединение колесных модулей 33 соответствует закрытому базовому модулю 16. Соединение может быть использовано для отделения нескольких сред друг от друга. При угловом положении I колес локальные оси Y 7 и Z 8 колесных модулей 33 в зависимости от конструкции базового модуля 16 и формы колесной шины 38 могут быть идентичными.
Угловое положение Т колес, показанное на ФИГ. 1, наряду с угловым положением V колес символически представляет параллельное кинематическое положение колесного модуля 33 с углом 93 наклона колес, равным 90°, стоящего на месте или катящегося по грунту 12, устройства 21 соединения статоров. Угловое положение колес, составляющее по меньшей мере 90°, можно использовать, в частности, при применении колесных модулей 33 в качестве горизонтально вращающегося устройства 14 при вертикальном и/или горизонтальном движении в воздухе в виде двухроторного вертолетного устройства и/или в виде солнечного трекера.
Углы 93 наклона колес при отсутствии влияния боковых сил в направлении общей оси X 3 в случае прямолинейного движения могут быть идентичными. При прямолинейном движении по наклонной поверхности, при движении с изменением направления, а также при наличии действующих боковых сил, например, в виде бокового ветра, углы 93 наклона колес могут иметь различные значения.
Устройство может иметь также угловые положения колес, промежуточные между описанными опорными угловыми положениями. В одном приложении не обязательно должны использоваться все указанные угловые положения колес. Изменение углового положения колес и процесс трансформации в зависимости от скорости движения могут осуществляться бесступенчато на грунте 12 и/или в шаговом режиме путем кратковременного подъема одной стороны колесного модуля, например, при помощи алгоритмического балансирования параллельных кинематических устройств.
Величина углов в опорных угловых положениях зависит от конкретного приложения.
Угла продольного крена / угол поперечного крена
Угол 96 продольного крена и угол 97 поперечного крена определяют угловое положение грузового корпуса 11 относительно общей системы 1 координат базового модуля 16 и/или положение общей системы 1 координат относительно силы 58 тяжести.
На величину угла 96 продольного крена может оказывать влияние поворот массивных устройств, в частности, накопителей 39 энергии, в соответствии с условиями применения грузового несущего устройства 26 и/или грузового корпуса 11, относительно одной или нескольких степеней свободы. Угол продольного крена образуется по меньшей мере между одной общей осью Z устройства и направлением силы тяжести. Влияние угла продольного крена 96 на устройство может быть полезным, в частности, при положительном или отрицательном ускорении, при стабилизации грузового корпуса, а также при выполнении любых работ.
Угол 97 поперечного крена соответствует углу между общей осью Y 4 устройства и направлением силы 58 тяжести. Угол 97 поперечного крена может быть образован двумя углами 93 наклона колес базового модуля 16 и/или перемещением веса по криволинейной траектории. Углы 93 наклона колес при угле 97 поперечного крена могут иметь различные значения, большие или меньшие нуля. Различные углы 93 наклона колес могут оказывать влияние на угол 97 поперечного крена в случае параллельного кинематического устройства 21 соединения статоров во всех степенях свободы, а в случае последовательного кинематического устройства 21 соединения статоров - в соответствующих степенях свободы.
Угол 96 продольного крена, угол 97 поперечного крена и углы 93 наклона колес могут иметь положительные или отрицательные значения.
Управление и выравнивание при помощи кинематических накопителей энергии
Управление и выравнивание устройства может осуществляться, в частности, при помощи импульсного или постоянного перемещения массы любых компонентов. Это может иметь место, в частности, в случае фиксированного соединения колесных модулей 33. Двигатели 60 питаются от одного или нескольких любых массивных накопителей 39 энергии. Один или несколько накопителей 39 энергии могут быть соединены с роторами 36 и/или статорами 29 колесных модулей 33 и/или с устройством 21 соединения статоров и установлены один за другим и/или рядом один с другим с возможностью любого кинематического поворота вокруг локальных осей и/или общей оси X.
Накопители 39 энергии в одном или нескольких положениях могут иметь фиксированное или любое кинематическое соединение со статорами 29 и/или с роторами 36 базового модуля 16 или любых модулей, таких как, соединительные устройства 44 модулей или паланкины 46. В результате этого гироскопические, центробежные и/или центростремительные эффекты, возникающие, например, вследствие эксцентрикового смещения масс вращающихся частей устройства, оказывающего влияние на угол 96 продольного крена и/или угол 97 поперечного крена, и/или вследствие перемещения вращающихся частей устройства, могут быть использованы для приложения силы к базовому модулю 16.
Эти конструктивные решения могут быть использованы, например, в функции способа рулевого управления, способа трансформации, любого способа управления и/или для выполнения любых работ.
Накопители энергии
Накопители 39 энергии для накапливания электрической энергии в случае электрических приводных устройств 61 могут содержать аккумуляторы 98. В случае гидравлических или гибридных приводных устройств 61 накопители 39 энергии в виде гибридных накопительных систем могут состоять из одного или нескольких гидравлических пружинных аккумуляторов, например, для рекуперации энергии торможения.
Накопители 39 энергии в описываемых вариантах применения непосредственно и/или опосредованно соединены с ротором 36, и со статором 29 колесного модуля 33 и/или со устройством 21 соединения статоров. В случае параллельного кинематического базового модуля 16 накопители энергии могут быть соединены с внутренней и/или наружной параллельной кинематической платформой 18. Накопитель 39 энергии может состоять из одного или нескольких сегментов 88 накопителя энергии.
Устройство соединения статоров
Устройство 21 соединения статоров может состоять из одной или нескольких частей. Одна часть может включать в себя грузовое несущее устройство 26, которое соединяет устройство соединения статоров с грузовым корпусом 11. Устройство 21 соединения статоров может соответствовать, как грузовому несущему устройству 26, так и грузовому корпусу 11.
Грузовое несущее устройство / вложение оболочек
Грузовой корпус 11 через грузовое несущее устройство 26 в виде внутреннего и наружного грузового несущего устройства 26 может быть фиксированно и/или, например, кинематически по меньшей мере с одной степенью свободы соединен с устройством 21 соединения статоров. Это возможно с одной или несколькими степенями свободы, например, с целью радиального выравнивания бокового баланса относительно общей оси Y 4 при наличии нескольких человек 9, для наклона грузового корпуса 11, для процесса выравнивания и/или для выполнения любых работ, например, при повороте на 180° грузового несущего устройства 26 вокруг общей оси Y 4 с целью изменения направления движения без поворота всего устройства. Благодаря этому, устройство может при помощи качения передвигаться по грунту 12 в обоих направлениях общей оси Z 5.
На ФИГ. 1 представлен вариант осуществления со сферическим, прозрачным и местами частично прозрачным грузовым несущим устройством 26, состоящим из нескольких шаровых сегментов с различными функциями. Шаровые сегменты состоят из устройств 21 соединения статоров в виде фиксированного соединения 99 статоров, дверных устройств и боковых оконных устройств 100.
Как наружное, так и внутреннее грузовое несущее устройство 26 с любыми вложенными соединительными устройствами, в частности, с простыми или вложенными сплошными оболочками 63 роторов или с сегментами 64 оболочек роторов, могут быть соединены друг с другом для выполнения любых работ и/или для разделения, превращения и/или очистки различных сред, давления и/или температурных условий.
Устройства соединения роторов
По меньшей мере два ротора 36 двух вращающихся устройств 14 базового модуля 16 могут быть соединены с колесными дисками 37 и колесными шинами 38 непосредственно и/или опосредованно при помощи любых устройств 31 соединения роторов, в частности, фиксированных и/или динамических роторных стоек 35, сплошных роторных оболочек 63, сплошных роторных оболочек 63 с углублениями для кинематических роторных стоек 35, сегментов 64 роторных оболочек, динамических устройств, обтянутых тканью устройств и/или любых других кинематических устройств. Нулевая точка локальной оси 7 колесного модуля 33 может соответствовать колесной шине 38 в положении точки 87 касания грунта.
Устройства 31 соединения роторов в обоих направлениях локальной оси X могут иметь любой изгиб, в частности, сферический изгиб, или линейную форму. В случае линейного роторного соединительного устройства ось Y колесного диска 37 соответствует оси Y ротора 36. В зависимости от конструкции и варианта применения статоры 29 могут также непосредственно соприкасаться.
Устройства соединения статоров
Статоры 29 колесных модулей 33 соединены друг с другом при помощи по меньшей мере одного любого устройства 21 соединения статоров. Устройство 21 соединения статоров может состоять из одной или нескольких фиксированных и/или кинематических статорных стоек 81, статорной оболочки 101, сегментов 102 статорной оболочки, динамических устройств, обтянутых тканью устройств и/или любых кинематических устройств, непосредственно и/или опосредованно соединенных при помощи любого грузового несущего устройства 26 с грузовым корпусом 11. Грузовой корпус 11 может быть больше или меньше, чем устройство.
Оболочки статоров / доступ / дверное устройство
Устройство 21 соединения статоров, представленное на ФИГ. 1, имеет сферическую геометрию. Две внутренние параллельные кинематические платформы 18 параллельного кинематического устройства 17 могут быть непосредственно или через любое грузовое несущее устройство 26 соединены друг с другом или могут быть выполнены в виде единой детали. В описываемых вариантах осуществления внутренние параллельные кинематические платформы 18 соединены друг с другом устройством 21 соединения статоров посредством прозрачного жесткого корпуса, выполненного в виде сферических сегментов. При этом обеспечивается возможность доступа к грузовому корпусу 11 спереди и/или сзади. Устройство 21 соединения статоров состоит по меньшей мере из одного фиксированного соединения 99 статоров и по меньшей мере из одной радиальной кинематической части, называемой далее также дверным устройством 25. Дверные устройства 25 соединены с внутренними параллельными кинематическими платформами 18 при помощи ручных или любых других кинематических устройств с возможностью радиального перемещения вокруг общей оси X 3.
Преобразование энергии / способ получения энергии / строение оболочек
Устройства 31 соединения роторов и/или устройства 21 соединения статоров могут выполнять функцию несущего устройства для различных устройств в зависимости от области применения.
Устройство может быть объединено с устройствами для преобразования солнечной и/или ветровой энергии в электрическую энергию. Энергия аккумулируется в накопителях 39 энергии.
В качестве устройств 65 для преобразования энергии могут быть использованы любые приводные устройства и/или устройства для рекуперации энергии, в частности, двигатели 60 и/или генераторы 85, устройства для преобразования силовых импульсов амортизатора в электрическую энергию, обеспечивающие рекуперацию энергии и/или гидравлические пружинные аккумуляторы или аккумуляторы давления воздуха, и/или устройства для преобразования энергии, например, в виде солнечных батарей и/или для использования ветровой энергии путем применения колесных модулей 33 в виде ветровых колес в качестве прямого привода, со стойками 32 в качестве фиксированной или регулируемой несущей поверхности 103 ротора, и/или в виде фотоэлектрического устройства 104.
Устройства 21 соединения статоров и устройства 31 соединения роторов со сферическими сегментообразными боковыми оболочками 105 могут быть любым образом соединены с прозрачными или частично прозрачными устройствами и/или деталями из акрилового стекла с залитыми и/или нанесенными со стороны наружной стенки фиксированными или динамическими фотоэлектрическими устройствами 104, выполненными, например, в виде структур из текстильных сетчатых материалов, или могут состоять из этих устройств.
Фотоэлектрическое устройство 104 как единое целое или в виде фотоэлектрических сегментов 106, расположенных на определенном расстоянии друг от друга, может быть любым способом соединено с устройством. В описываемых вариантах осуществления фотоэлектрические сегменты 106, как соединенные с ротором 36 прозрачные роторные оболочки 63, так и с прозрачными статорными оболочками 101 в качестве грузового несущего устройства 26, установлены по кругу. Вследствие кругового расположения и специфических расстояний между фотоэлектрическими сегментами 106, распределенными на несколько кругов с различными диаметрами за пределами поля зрения, возможна частичная прозрачность вращающихся роторных оболочек 63 за счет эффекта размытости, называемого далее также стробоскопическим эффектом. При этом часть солнечного света достигает также внутренней оболочки с внутренними фотоэлектрическими сегментами 106.
Устройство может быть зафиксировано на месте, частично зафиксировано, на воде 13 и/или в воде 13 в сочетании с кинематическими, соответственно формованными стойками 32, при помощи способа качающегося диска и фотоэлектрического устройства 104, вертикально или горизонтально, в качестве генератора с целью получения гидротехнической, приливной и солнечной силовой установки.
Устройство может также состоять из одного или нескольких базовых модулей 16 без колесных дисков 37.
Визуальная индикация скорости и числа оборотов
Стробоскопический эффект, создаваемый вращающимися фотоэлектрическими сегментами 106 роторной оболочки 63 колесного модуля 33, может быть использован также для определения скорости и частоты вращения роторов 36 без применения дополнительного устройства путем специального расположения фотоэлектрических сегментов 106 на вращающихся прозрачных роторных оболочках 63 или на сегментах 64 роторных оболочек и/или наложенными на внутреннюю сторону колесного диска 37 или путем использования комбинации с фотоэлектрическими сегментами 106 и/или любыми сигнальными знаками на сегментах 102 статорных оболочек и/или роторных оболочек 63 в комбинации с направленным источником света.
Многофункциональный двухкомпонентный модуль для дорожного движения
Устройство может быть соединено с многофункциональным двухкомпонентным модулем 107 для дорожного движения. Оба компонента, установленных на наружных сторонах колесных модулей 33, соединяются с наружными сторонами статоров 29 фиксированно или с возможностью поворота вокруг локальных осей X 6. Указанные модули могут выполнять функции, например, пассивного водосбрасывателя 108 и сигнального устройства и/или могут быть использованы для механической очистки дисков устройств 31 соединения роторов с целью активного удаления воды с роторных оболочек 63. Бесконтактная очистка дисков роторных оболочек 63 возможна при помощи способа воронкообразного впрыска под высоким давлением с системой регенерации воды. При этом в случае колесных модулей 33 с роторными оболочками 63 промывочная вода под высоким давлением разбрызгивается из водяной струи, проходящей под соответствующим углом вдоль радиуса, на вращающиеся роторные оболочки 63 и под углом рикошета сразу всасывается снова, возвращается и очищается. Этот принцип является пригодным, в частности, также для накапливания дождевой воды.
Увеличение грузового объема
Базовый модуль 16, катящийся по грунту 12, может быть соединен по меньшей мере с одним любым дополнительным грузовым модулем 110 при помощи соединительного устройства 44 базовых модулей, называемого также базовым соединительным модулем 45, без использования или с использованием по меньшей мере одного дополнительного вращающегося устройства 14 спереди, сзади, слева и/или справа. Базовый соединительный модуль 45 может быть выполнен в виде сцепного устройства 109 по меньшей мере с одним дополнительным пассивным или активным фиксированным или любым кинематическим способом соединенным вращающимся устройством 14 или вспомогательным колесом 48 и соединен при помощи одной или нескольких соединительных осей 132 базового модуля или любым кинематическим способом с базовым модулем 16. Вращающееся устройство 14 может состоять, например, из пассивного кинематически соединенного ведомого колеса в качестве вспомогательного колеса 48. Сцепное устройство 109 может иметь параллельное кинематическое и/или любое соединение с базовым модулем 16. При этом по меньшей мере два базовых модуля 16 также могут быть непосредственно соединены один с другим.
Дополнительный грузовой модуль 110 может кинематически соединять несколько базовых модулей 16 при помощи соединительного устройства 44 базовых модулей последовательно один за другим и/или один с другим любым кинематическим способом. Соединительное устройство 44 базовых модулей можно сравнить с принципом паланкина 46. Свойства конструкции с последовательным расположением один за другим двух базовых модулей 16 соответствует традиционному транспортному средству с четырьмя колесами с геометрической трансмиссией. Соединительное устройство 44 базовых модулей может быть соединено с базовыми модулями 16 любым последовательным кинематическим и/или параллельным кинематическим способом, в угловых положениях А, Н и V колес по центру при помощи одного или нескольких фиксированных устройств 21 соединения статоров и/или сбоку во всех угловых положениях колес при помощи статоров 29. С помощью центрального соединительного устройства 44 базовые модули 16 могут поворачиваться на 360° вокруг их общей оси Y 4. Таким образом, устройство с соединительным устройством 44 базовых модулей и двумя базовыми модулями 16, катясь по грунту 12, может перемещаться, как в переднем, так и в боковых направлениях. Соединение может быть установлено вручную и/или автоматически. При этом более, чем два базовых модуля 16 могут быть соединены друг с другом при помощи более, чем одного наклоняемого в продольном и поперечном направлениях соединительного устройства 44 базовых модулей в одном измерении, например, в виде шинной цепи, или в нескольких измерениях связанных последовательно один за другим и/или параллельно рядом один с другим и/или в виде трехмерной электромеханической сети.
Соединительное устройство 44 базовых модулей с одним или несколькими временными вспомогательными колесами 48 может также временно буксироваться или толкаться только одним базовым модулем 16 в виде сцепного устройства 109 с целью выполнения автоматического соединительного маневра и/или компактного размещения на стоянке.
Механическая модификация / способ демонтажа
Устройство в зависимости от конструкции может быть вручную, автоматически и/или автономно увеличено, уменьшено, смонтировано и/или демонтировано. Отдельные конструктивные узлы и/или компоненты могут быть соединены друг с другом при помощи быстроразъемных соединений, в частности, запирающих устройств 28 шаровых шарниров. Защитные устройства 111 могут состоять из прозрачных, вкладываемых друг друга складных устройств. Колесные диски 37 могут быть образованы одним колесным диском или несколькими сегментами 50 колесного диска, а колесные шины 38 - одной колесной шиной 38 или несколькими сегментами 51 колесной шины. Это позволяет, в частности, осуществлять способ изготовления в виде предварительно смонтированных, вложенных друг в друга конструктивных узлов, доставляемых грузовым транспортом для децентрализованного конечного монтажа.
Соединительное устройство 31 роторов может состоять из трехточечного соединения с тремя повторно закрывающимися шарнирными шаровыми муфтами, называемыми также запирающими устройствами 28 шаровых шарниров, в качестве временного соединения между ротором 36 и колесным диском 37. При этом запирающее устройство 28 шарового шарнира колесного модуля 33 освобождается от колесного диска 37 в определенном радиальном положении, которое зависит от конкретного варианта применения. Это позволяет открывать и закрывать колесный модуль 33 при двух закрытых запирающих устройствах 28 шаровых шарниров. Таким образом, помимо возможности временного демонтажа возможен доступ сбоку к грузовому корпусу 11 и/или к грузовому несущему устройству 26.
Виды передвижения и движения на месте без дополнительных модулей
Устройство позволяет в вертикальном положении при направлении общей оси Y в соответствии с направлением силы 58 тяжести, без дополнительных модулей осуществлять движение по грунту 12 на месте путем качения при помощи вращения вокруг собственной общей оси Y 4, в переднем направлении путем качения с одинаковыми или не одинаковыми углами 93 наклона колес, в частности, в угловых положениях А, Н, V и I колес, и/или в боковых направлениях в шаговом режиме по прямолинейной или наклонной поверхности, по лестницам и неровному рельефу и/или в плавающем положении в такой среде, как вода 13.
Способ качающегося диска описывает стойки 32, называемые в данном контексте также роторными стойками 35, которые кинематически связаны с колесным модулем 33 через продольную ось стоек, называемую также осью 34 роторных стоек, и которые могут занимать различные положения в зависимости от радиального положения колесного модуля 33. Это позволяет осуществлять, как дифференциальное управление между двумя колесными модулями 33, так и управление внутри одного колесного модуля 33.
Устройство в сочетании со способом качающегося диска без дополнительного модуля обеспечивает горизонтальное и/или вертикальное передвижение по грунту 12 и/или в такой среде, как воздух и/или вода 13 и/или в вакууме.
При помощи устройства 84 поворота платформы, соединенного с внутренней параллельной кинематической платформой 18 или с дополнительным сблокированным параллельным кинематическим устройством 17, наружная параллельная кинематическая платформа 18 может занимать горизонтальное положение, параллельное общей оси X 3. Это соответствует углу наклона колес, равному 90° и угловому положению Т колес. В сочетании с вращающимися колесными модулями 33 согласно способу применения механического и/или электромеханического способа качающегося диска устройство может быть использовано в виде двухроторного подъемно-винтового устройства. При этом базовый модуль 16, находясь на грунте 12, соединяется с грунтом 12 через устройство 21 соединения статоров при помощи любого фиксированного и/или кинематического опорного и/или любого вращающегося устройства 14.
В сочетании со способом применения качающегося диска устройство может осуществлять, в частности, горизонтальное движение в виде парусного устройства, катящегося по грунту 12 или по воде 13 с прямым ветровым приводом, или в виде стационарного и/или перемещающегося ветротурбинного устройства. Управление качающимся диском может осуществляться при помощи механических, электронных или электромеханических средств, централизованно или децентрализованно. В случае применения децентрализованного управления качающимся диском стойки 32, установленные с возможностью перемещения вокруг продольной оси 92 стоек, например, в виде флюгерного паруса 113 с датчиками ветра на стойках 32, могут непосредственно перемещаться без централизованного управления. Процесс принятия управляющих решений происходит непосредственно между датчиками и кинематическим устройством перемещения стоек 32. В качестве естественных датчиков и приводных элементов пружинное устройство во взаимодействии с усилием со стороны среды может управлять положением стоек 32 даже без электронных датчиков и приводных элементов. Это позволяет автономно, при локальном управлении изменять углы наклона стоек при помощи любого кинематического устройства на основании определения направления ветра относительно направления движения и других параметров. Такой способ является также пригодным для обеспечения безопасности путем непосредственной реакции преобразования угла 93 наклона колес под влиянием силы бокового ветра в угловое положение колес.
Устройство позволяет без дополнительных модулей осуществлять перемещение базового модуля 16 на грунте 12 между вертикальным положением с общей осью Y 4, совпадающей по направлению с силой 58 тяжести, и с касанием колесного диска 37 и/или колесной шины 38 грунта 12, горизонтальным положением с общей осью X 3, совпадающей по направлению с силой 58 тяжести, и/или наклонным положением с касанием и/или без касания колесным диском 37 и/или колесной шины 38 грунта 12 в положении лежа на боку, на месте. Это возможно в зависимости от области применения, в частности, при помощи алгоритма спиралеобразного движения с электронным управлением при помощи приводных устройств 61 колесных модулей 33 в сочетании с параллельным кинематическим устройством соединения статоров, а также с кинематическими накопителями 39 энергии, без дополнительных устройств и/или, например, с упругим устройством защиты от ударных воздействий в виде соответствующего устройства 114 защиты кромок.
Устройство обеспечивает возможность горизонтального передвижения без дополнительных модулей, в плавучем положении в такой среде, как вода 13, с вертикальной общей осью Y 4, при помощи фиксированных или любых кинематических дифференциально перемещаемых стоек 32 в качестве приводных лопастей 129 боковых колес. В случае закрытого базового модуля 16 с угловым положением I колес глубина погружения может обеспечиваться при помощи любого насосного устройства, регулирующего содержание воды между колесными модулями 33 с роторными оболочками 63 и устройством 21 соединения статоров с закрытыми сегментами 102 статорной оболочки.
Передвижение отдельного колесного модуля по грунту
Базовый модуль 16, уменьшенный до одного колесного модуля 33, может использоваться в качестве самостоятельного устройства для передвижения. Это может иметь место, например, в случае применения отдельного вращающегося устройства 14, катящегося по грунту 12, с параллельным кинематическим соединением статора 29 с грузовым корпусом 11 посредством асимметричного удлинения 115 статора с асимметричным грузовым несущим устройством 116 в виде асимметричного одноколесного транспортного средства с опорным устройством 117, содержащим или не содержащим опорное колесо 118, с ручной или электрической балансировкой, например, при помощи параллельного кинематического устройства, и/или с применением любой гиротехники.
Виды передвижения с дополнительными модулями
Устройство позволяет осуществлять горизонтальное и/или вертикальное передвижение с дополнительными модулями в такой среде, как воздух и/или вода 13 и/или в вакууме при любом фиксированном и/или кинематическом соединении по меньшей мере с одним любым тяговым устройством 42, левитационными устройствами и/или любыми устройствами для передвижения в среде и/или в вакууме в горизонтальном и/или вертикальном положении.
В описываемых вариантах осуществления согласно ФИГ. 1 используются механические тяговые устройства 42. Тяговые устройства 42 посредством любого шарнирного механизма, расположенного за пределами колесных модулей 33, соединены со статорами 29 при помощи соединителей 119 тяговых устройств, выполненных с возможностью поворота вокруг локальных осей X. Для уменьшения вибрации и шумовыделения каждое тяговое устройство 42 состоит из одного, двух или четного числа расположенных друг за другом турбинных колес 121, вращающихся вокруг оси 120 ротора тягового устройства. Расположение нескольких турбинных колес 121 друг за другом позволяет получить компактную конструкцию относительно силы тяги. Каждое турбинное колесо 121 имеет противоположное направление вращения относительно соседних турбинных колес 121. Турбинные колеса 121 приводятся в действие бесподшипниковыми моментными двигателями с полым валом в качестве внутреннего ротора. Скорости вращения турбинных колес 121 по отношению друг к другу могут изменяться для сжатия воздуха в зависимости от скорости передвижения. Турбинные колеса 121 могут содержать различное количество турбинных лопастей 122. В случае применения с обеих сторон по два поворотных тяговых устройства 42 может осуществляться горизонтальное и/или вертикальное передвижение в такой среде, как воздух или вода. При наличии соответствующего тягового устройства возможно также передвижение в вакууме.
Кроме того, устройство позволяет осуществлять горизонтальное передвижение с дополнительным модулем в такой среде, как воздух или вода, при наличии любого фиксированного и/или кинематического соединения по меньшей мере с одним любым крыльевым устройством 43 (устройством с несущей поверхностью).
Крыльевый сегмент 123 может состоять из одной или нескольких частей. Крыльевый сегмент 123 может быть повернут при помощи поворотного устройства 83 из вертикального в горизонтальное положение во время перемещения вокруг продольной оси 124 верхнего тягового устройства. В описываемых вариантах осуществления согласно ФИГ. 1 используется двухкомпонентое крыльевое устройство 43. Крыльевое устройство 43 состоит из двух крыльевых сегментов 123, которые установлены с возможностью поворота вокруг продольной оси 124 тягового устройства при помощи любого кинематического устройства, и которые в горизонтальном положении при помощи крыльесоединительного устройства 125 в виде запирающего устройства 28 шарового шарнира точечно, посредством поверхностного соединения или не механически соединены с шарнирным подшипником. В случае точечного шарового шарнирного соединения крыльевого устройства 43 крыльевые сегменты 123 во всех степенях свободы остаются кинематически соединенными друг с другом. В случае параллельного кинематического, любого соединительного устройства крыльевого устройства с точечным соединением или без непосредственного соединения крыльевых сегментов 123, управление устройством может также осуществляться без рулевых поверхностей 126 при помощи параллельного кинематического устройства. Крыльевые сегменты 123 состоят из нижней крыльевой секции 127 и верхней крыльевой секции 128, расположенных во внутренней области крыла, что сравнимо с принципом биплана. Крыльевое устройство 43 может работать в сочетании по меньшей мере с одним центральным тяговым устройством 42 или по меньшей мере с двумя тяговыми устройствами 42, расположенными по обеим боковым сторонам. В настоящем варианте осуществления часть крыльесоединительного устройства 125 соответствует наружной части верхнего тягового устройства, соединенного с возможностью поворота вокруг оси 120 ротора тягового устройства.
Механические устройства для соединения с грунтом с целью передачи данных и энергии, стыковочные станции
Для передачи энергии, данных и/или для выполнения любых работ внутри и/или снаружи устройства данное устройство может быть соединено с любым соединительным устройством. На прилагаемых чертежах представлено несколько вариантов механических соединений с грунтом 12 в виде устройств 54 соединения с грунтом, содержащих линии 133 передачи энергии и линии 134 передачи данных. Соединение может быть стационарным, кинематическим, фиксированным или бесконтактным. На ФИГ. 1, 3, 5 и 8 представлены различные централизованные и децентрализованные устройства 54 соединения с грунтом.
Примеры применения базовых модулей в качестве следящего устройства для использования солнечной и/или ветровой энергии
Колесный модуль 33 в качестве устройства сопровождения, называемого также следящим устройством 41, например, для получения солнечной и/или ветровой энергии, может быть непосредственно или опосредованно, фиксированно и/или кинематически соединен с грунтом 54 через статор 29 при помощи любых устройств 54 соединения с грунтом. При этом в зависимости от области применения могут быть использованы, как вогнутые, выпуклые или линейные внутренние стороны, так и наружные стороны оболочек 62 роторов.
Следящее устройство 41 может содержать специально открытый базовый модуль 16, который посредством центрального устройства 54 соединения с грунтом, содержащего механическую решетчатую опору и пружинный амортизатор, соединен с грунтом 12. В случае открытого параллельного кинематического базового модуля 16 с непараллельными колесными модулями 33 солнечный свет может дополнительно рассеиваться на внутренней стороне колесных модулей 33, например, через сферическую частично прозрачную оболочку 101 статора с фотоэлектрическими сегментами 106 и светоотражающей поверхностью на внутренних сторонах фотоэлектрических элементов. Вертикальное сопровождение солнца вокруг общей оси X 3 может осуществляться при помощи параллельного кинематического устройства. Горизонтальныйе сопровождение вокруг общей оси Y 4 возможно путем подъема базового модуля 16 с помощью параллельного кинематического устройства 17 за счет контакта с грунтом колесных модулей, поворота при помощи колесных модулей 33 и последующего опускания в новое положение решетки базового модуля 16. Таким образом, обеспечивается возможность отслеживания и сопровождения положения солнца без дополнительного кинематического устройства со стороны устройства 54 соединения с грунтом.
Устройство, благодаря его свойствами и кругообразной геометрии базового модуля 16, может также использоваться без устройств 54 соединения с грунтом в качестве фотоэлектрического следящего устройства 41, установленного на месте.
Пример применения базового модуля с ручным управлением
В качестве примера применения отдельного базового модуля 16 можно указать ручной параллельный кинематический способ управления с любым приводным устройством для приведения в действие устройства с целью передвижения по меньшей мере одного человека 9. Управление колесными модулями 33 может передаваться гидравлически, пневматически и/или электрически при помощи устройства рулевого управления, сравнимого с устройством рулевого управления мотоциклом. Устройство рулевого управления соединено с базовым модулем 16 механически и/или любым способом посредством беспроводной связи с дистанционным управлением. Таким образом, для выполнения любых работ возможно управление устройством, как изнутри, так и снаружи базового модуля 166. Устройство рулевого управления состоит из функциональной параллельной кинематической модели базового модуля 16, расположенной в центре устройства рулевого управления и выполненной в виде двух рычагов управления. Рычаги устройства рулевого управления соединены с соответствующими наружными параллельными кинематическими платформами 18 модели. Соответствующие положения параллельных кинематических устройств 17 параллельной кинематической модели посредством гидравлических, пневматических и/или электрических усилителей пропорционально передаются на параллельные кинематические 5 устройства 17 базового модуля 16. Опорные и предельные положения могут быть реализованы в модели при помощи соответствующих магнитных, пружинных и ограничительных механизмов. Это позволяет управлять устройством, включая параллельное кинематическое устройство, без применения электронных систем управления.
Пример применения электромеханической сети
В качестве примера применения нескольких отдельных и/или временно разделенных и/или вставленных один в другой и/или установленных один на другой соединенных базовых модулей 16 можно указать устройство для механической очистки и/или обработки грунта и/или воды способом, осуществляемым внутри и/или снаружи от базовых модулей 16, с целью сбора, сортировки, повторного использования, фильтрации, измельчения, гранулирования, расплавления любых загрязнений и переформования их с целью автоматического производства для изготовления любых изделий и/или для воспроизводства других базовых модулей 16 самими же базовыми модулями 16 в виде автономной интеллектуальной электромеханической сети.
Области применения / варианты исполнения
Устройство с любыми размерами и формой может иметь сверхлегкую, массивную, компактную и/или разъемную конструкцию, может вручную или автоматически приводиться в действие при любом классе мощности и иметь ручное, дистанционное, автоматическое и/или автономное управление при помощи искусственного интеллекта.
Устройство может иметь применение в таких областях, как общая и специальная технология транспортных средств, а также в области транспорта, в частности, транспорта для инвалидов, медицины, внедорожных транспортных средств, сельского хозяйства, развлечений, производства игрушек, защитных и спасательных транспортных средств, сбора отходов, сортировки, фильтрации, осветления, очистки, переработки, микротехнологии, молекулярной технологии, робототехники, беспилотных летательных аппаратов, водных, воздушных и космических транспортных средств и производства энергии, при этом устройство может также взаимодействовать с искусственным интеллектом.
Устройство может работать как замкнутая система в виде отдельного базового модуля 16 и/или в сочетании с несколькими одинаковыми и/или любыми соединительными устройствами как физически связанная, механически самоизменяющаяся и самовоспроизводимая умная сеть.
Перечень ссылочных обозначений
1. Нулевая точка общей системы координат
2. Нулевая точка локальной системы координат
3. Общая ось X
4. Общая ось Y
5. Общая ось Z
6. Локальная ось X
7. Локальная ось Y
8. Локальная ось Z
9. Человек
10. Предмет
11. Грузовой корпус
12. Грунт
13. Вода
14. Вращающееся устройство
15. Колесный диск
16. Базовый модуль
17. Параллельное кинематическое устройство
18. Параллельная кинематическая платформа
19. Параллельный кинематический шарнир
20. Ось симметрии
21. Устройство соединения статоров
22. Распорное устройство статора
23. Поворотное устройство статора
24. Распорный сегмент статора
25. Дверное устройство
26. Грузовое несущее устройство
27. Линейное кинематическое устройство
28. Запирающее устройство шарового шарнира
29. Статор
30. Моментный двигатель
31. Соединительное устройство роторов
32. Стойка
33. Колесный модуль
34. Ось стойки ротора
35. Стойка ротора
36. Ротор
37. Колесный диск
38. Колесная шина
39. Накопитель энергии
40. Модуль соединения с грунтом
41. Следящее устройство
42. Тяговое устройство
43. Крыльевое устройство
44. Соединительное устройство базового модуля
45. Базовый соединительный модуль
46. Паланкин
47. Аэродинамическая соединительная оболочка
48. Вспомогательное колесо
49. Одноколесное прицепное устройство
50. Сегмент колесного диска
51. Сегмент колесной шины
52. Устройство сцепления
53. Опорное устройство накопления энергии
54. Устройство соединения с грунтом
55. Главная соединительная ось
56. Боковая соединительная ось
57. Сдвигающее устройство
58. Сила тяжести
59. Ось вращения
60. Двигатель
61. Приводное устройство
62. Оболочка ротора
63. Сплошная оболочка ротора
64. Сегменты оболочки ротора
65. Устройство преобразования энергии
66. Магнитное подшипниковое устройство
67. Приводной элемент
68. Подшипниковое устройство
69. Шарнирное устройство
70. Главный соединительный вал
71. Главная соединительная ось
72. Рычаг управления
73. Переднее сдвигающее устройство
74. Заднее сдвигающее устройство
75. Левая сдвигающая ножка
76. Правая сдвигающая ножка
77. Цилиндрическое устройство
78. Амортизатор
79. Шаровой шарнир
80. Последовательное кинематическое соединительное устройство
81. Стойка статора
82. Гексапод
83. Поворотное устройство
84. Поворотное устройство платформы
85. Генератор
86. Угол волочения
87. Точка касания грунта
88. Сегмент накопителя энергии
89. Эксцентриковое устройство
90. Эксцентриковая ось
91. Рычаг управления сдвигающего устройства
92. Продольная ось стойки
93. Угол наклона колес
94. Центр углового поворота колеса
95. Гидравлический цилиндр
96. Угол продольного крена
97. Угол поперечного крена
98. Аккумулятор
99. Фиксированное соединение статоров
100. Боковое оконное устройство
101. Оболочка статора
102. Сегмент оболочки статора
103. Несущая поверхность ротора
104. Фотоэлектрическое устройство
105. Боковой оболочка
106. Фотоэлектрический сегмент
107. Модуль дорожного движения
108. Водосбрасыватель
109. Сцепное устройство
110. Дополнительный грузовой модуль
111. Защитное устройство
112. Ветротурбинное устройство
113. Флюгерный парус
114. Устройство защиты кромок
115. Асимметричное удлинение статора
116. Асимметричное грузовое несущее устройство
117. Опорное устройство
118. Опорное колесо
119. Соединитель тяговых устройств
120. Ось ротора тягового устройства
121. Турбинное колесо
122. Турбинная лопасть
123. Сегмент несущей поверхности
124. Продольная ось тягового устройства
125. Крыльесоединительное устройство
126. Рулевая поверхность
127. Нижняя крыльевая секция
128. Верхняя крыльевая секция
129. Приводная лопасть бокового колеса
130. Ось поворота накопителя энергии
131. Шарнир колесного диска
132. Соединительная ось базового модуля
133. Линия передачи энергии
134. Линия передачи данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕСНАЯ ОПОРА СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2002 |
|
RU2297756C2 |
| КОЛЕСНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГАЧ | 1993 |
|
RU2096234C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| ВЕЗДЕХОД | 2014 |
|
RU2549300C1 |
| ПОРТАЛЬНЫЙ КРАН | 2015 |
|
RU2654263C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| СЕГМЕНТ ХОДОВОГО ПУТИ КОНВЕЙЕРА И КОНВЕЙЕР ИЗ ЭКСТРУДИРОВАННОГО АЛЮМИНИЕВОГО ПРОФИЛЯ СО СМЕЩЕНИЕМ ПУТИ (ВАРИАНТЫ) | 1995 |
|
RU2152344C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА ЧЕТЫРЁХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666080C1 |
| СНЕГОБОЛОТОХОД | 2023 |
|
RU2801955C1 |
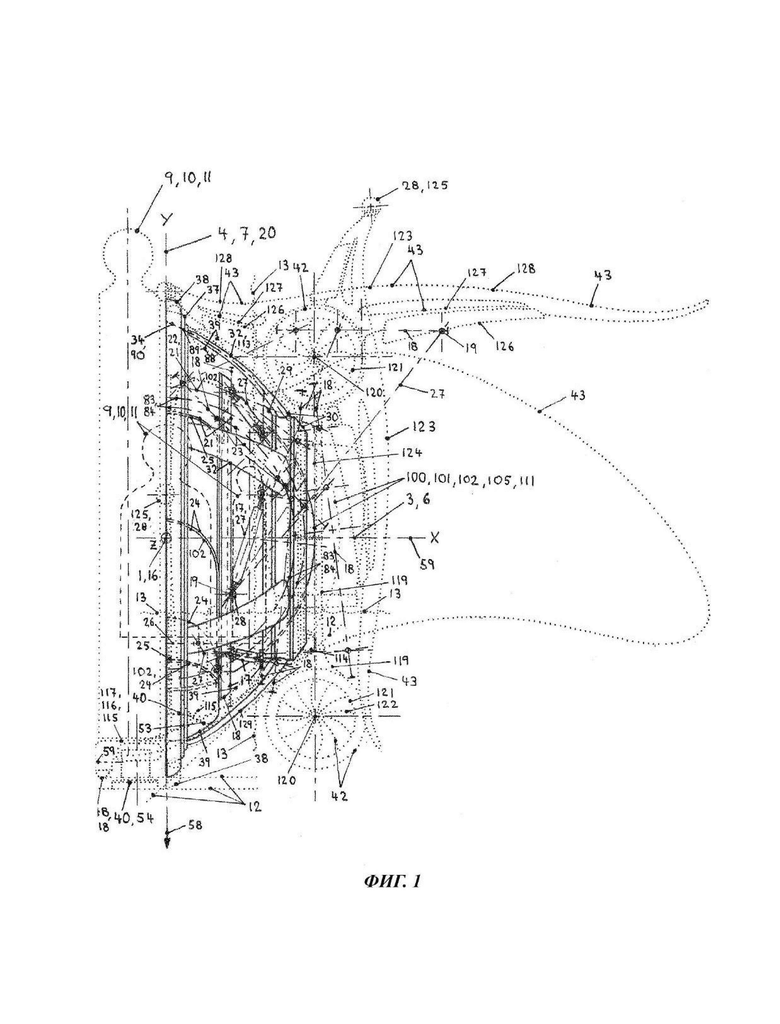
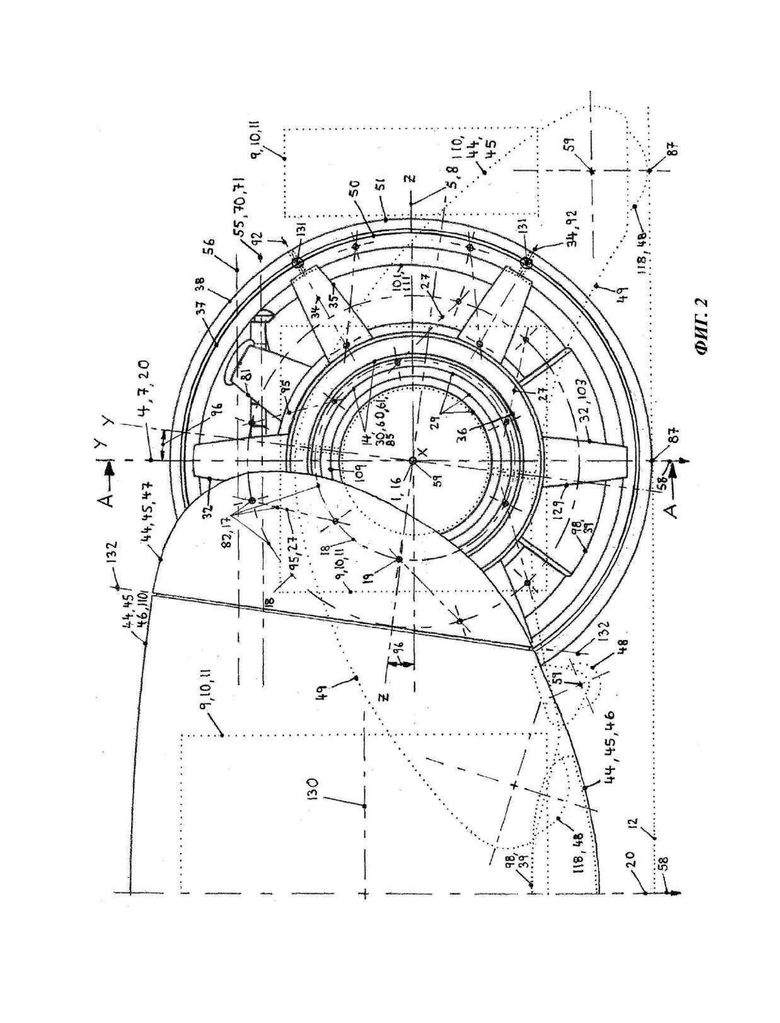
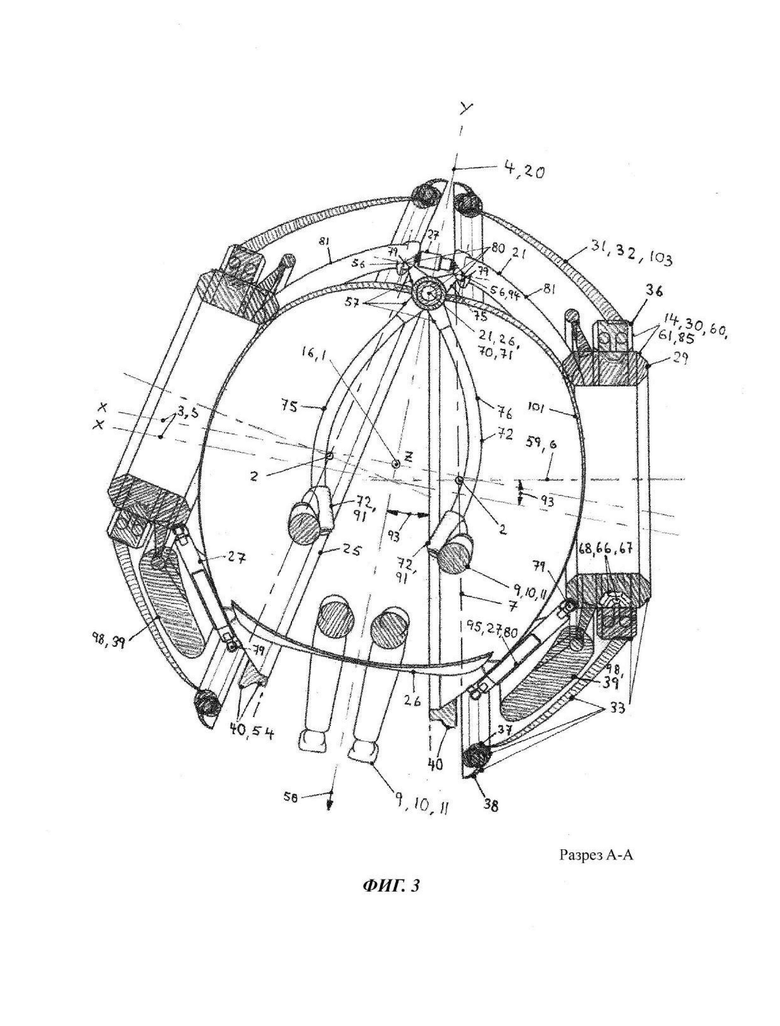
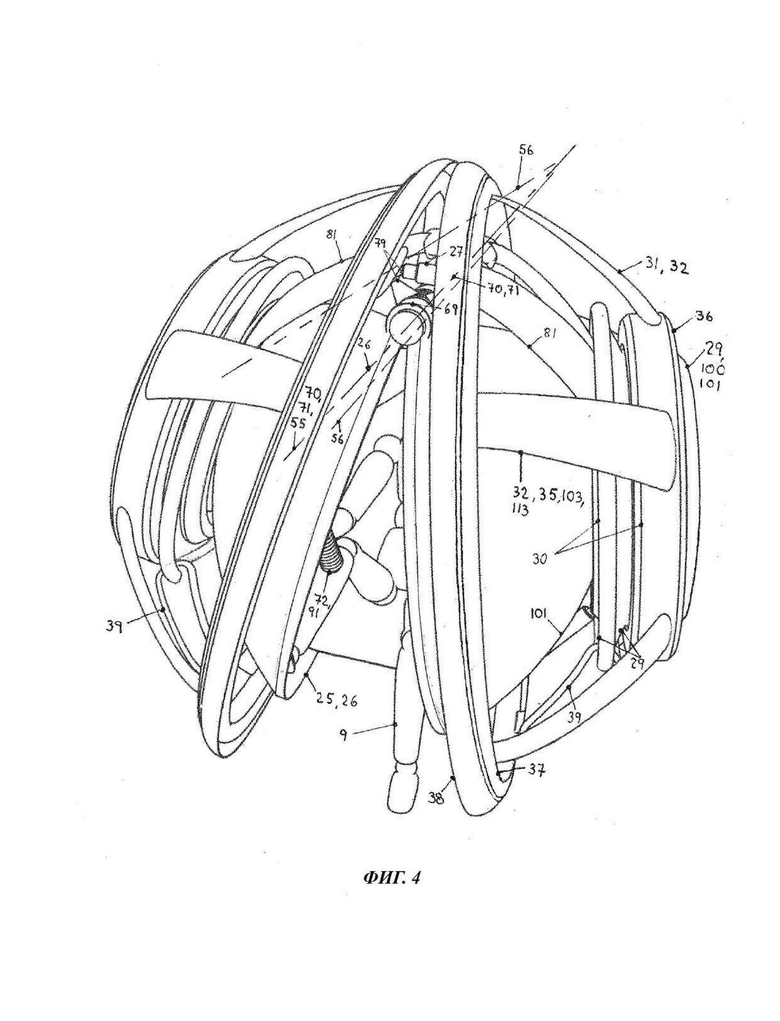

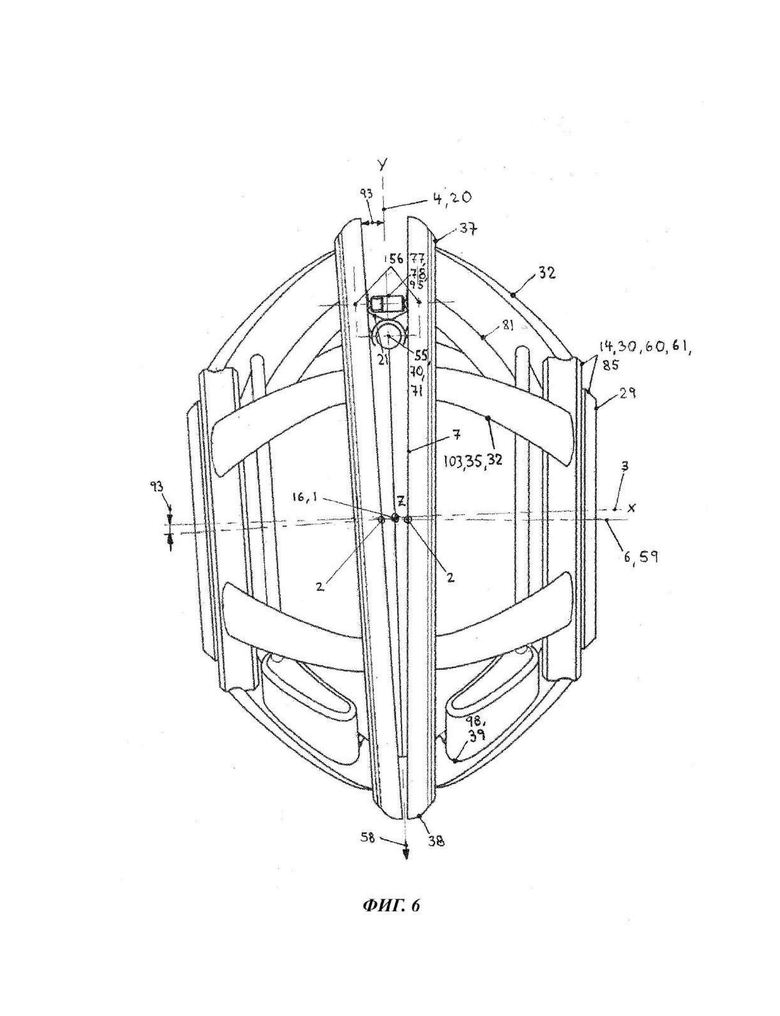
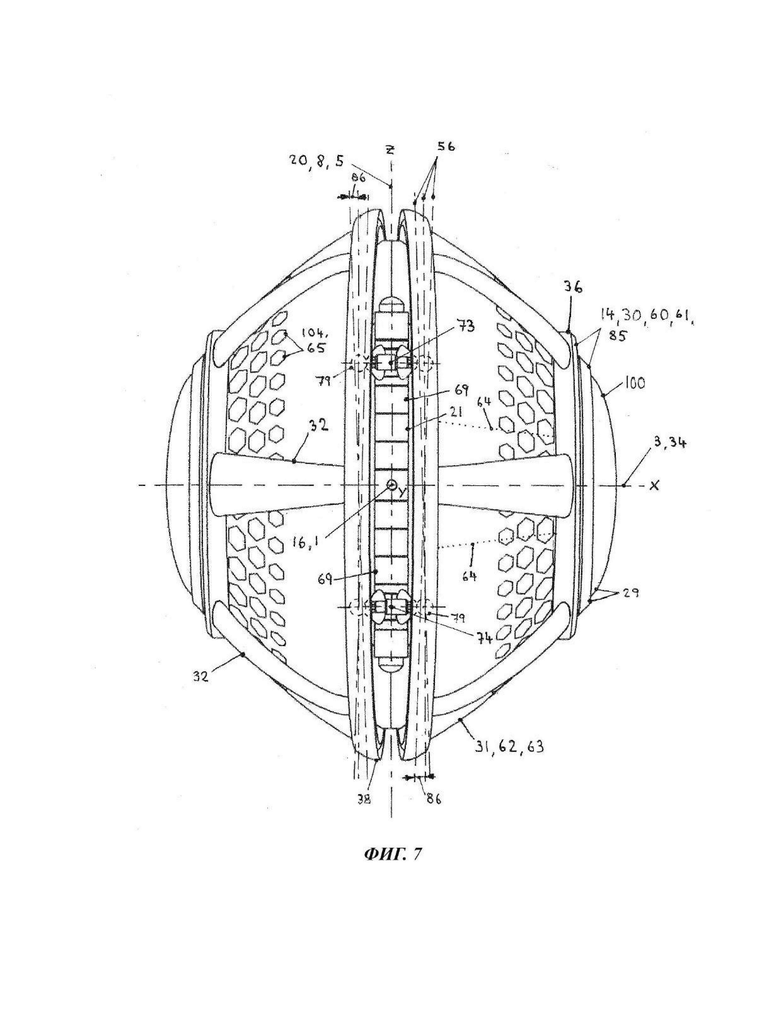
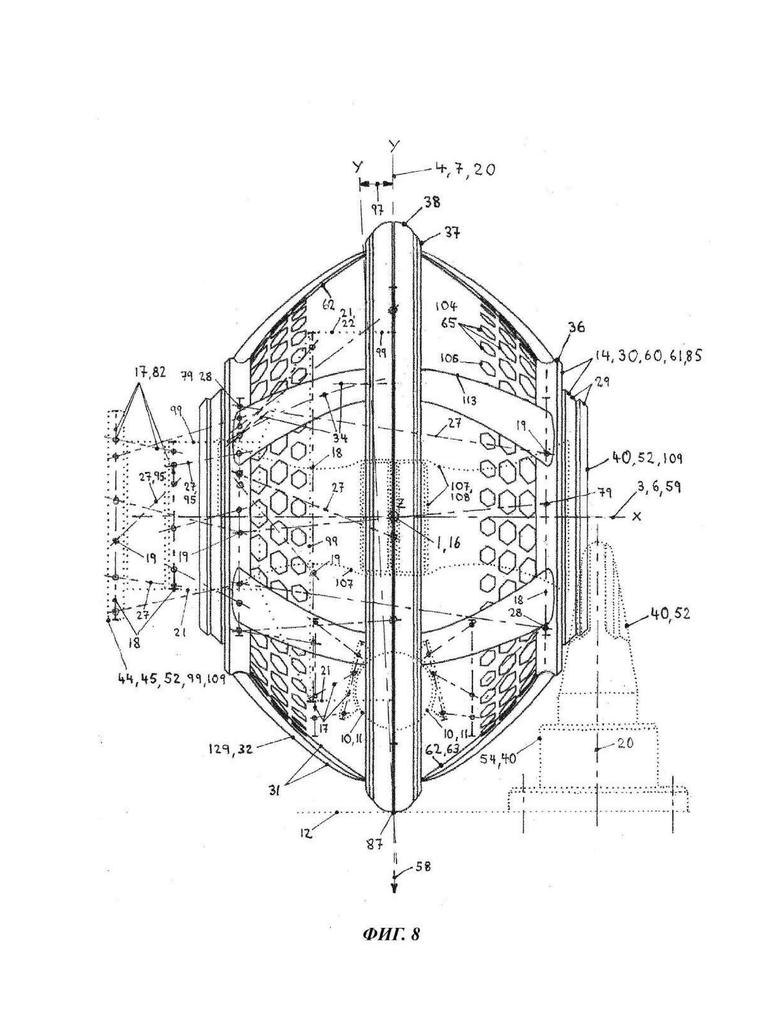
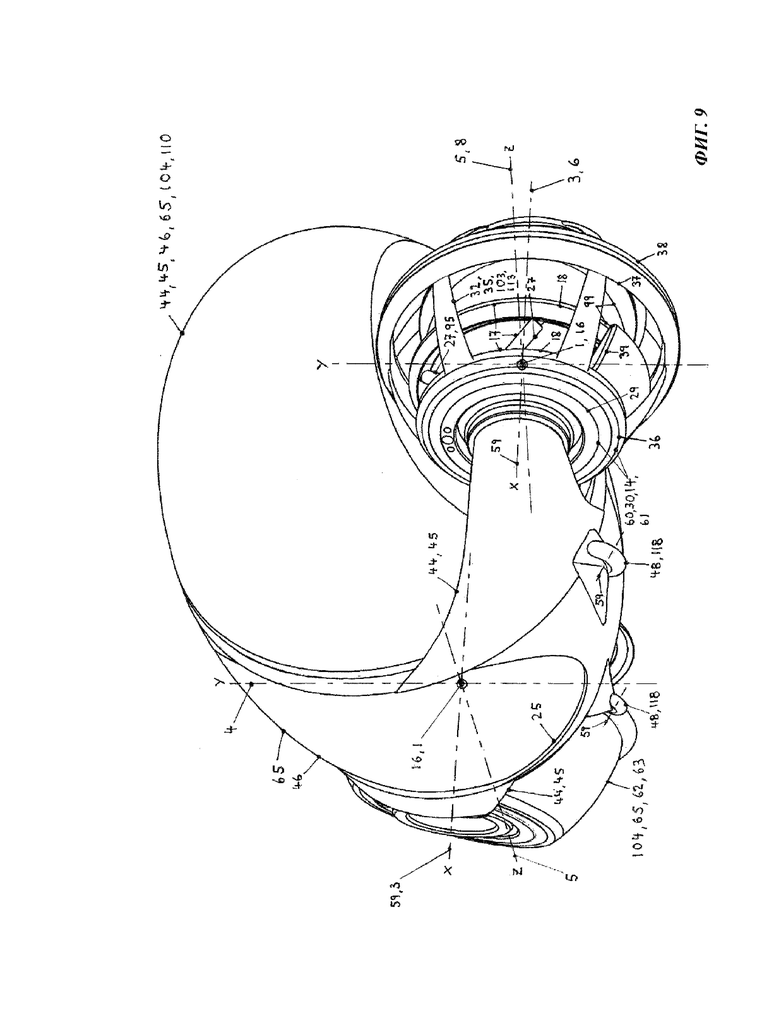
Изобретение относится к транспортным средствам. Транспортное средство содержит первую и вторую часть, при этом первая часть содержит первое ходовое колесо, вращающееся вокруг первой оси вращения, а вторая часть содержит второе ходовое колесо, вращающееся вокруг второй оси вращения. Оба колеса имеют одинаковый диаметр. Первый подшипник для вращающейся опоры первого ходового колеса и второй подшипник для вращающейся опоры второго колеса соединены друг с другом посредством шарнирного механизма так, чтобы изменять ориентации первой и второй оси вращения относительно друг друга. Транспортное средство плавно переводится при помощи шарнирного механизма из первой конфигурации с наклонными относительно друг друга первой и второй осью вращения во вторую конфигурацию с параллельными друг другу первой и второй осью вращения. Во второй конфигурации расстояние от первой контактной поверхности первого ходового колеса до второй контактной поверхности второго колеса составляет менее одной десятой диаметра ходового колеса. Снижается сопротивление воздуха при движении, повышается компактность и динамичность. 4 н. и 14 з.п. ф-лы, 9 ил.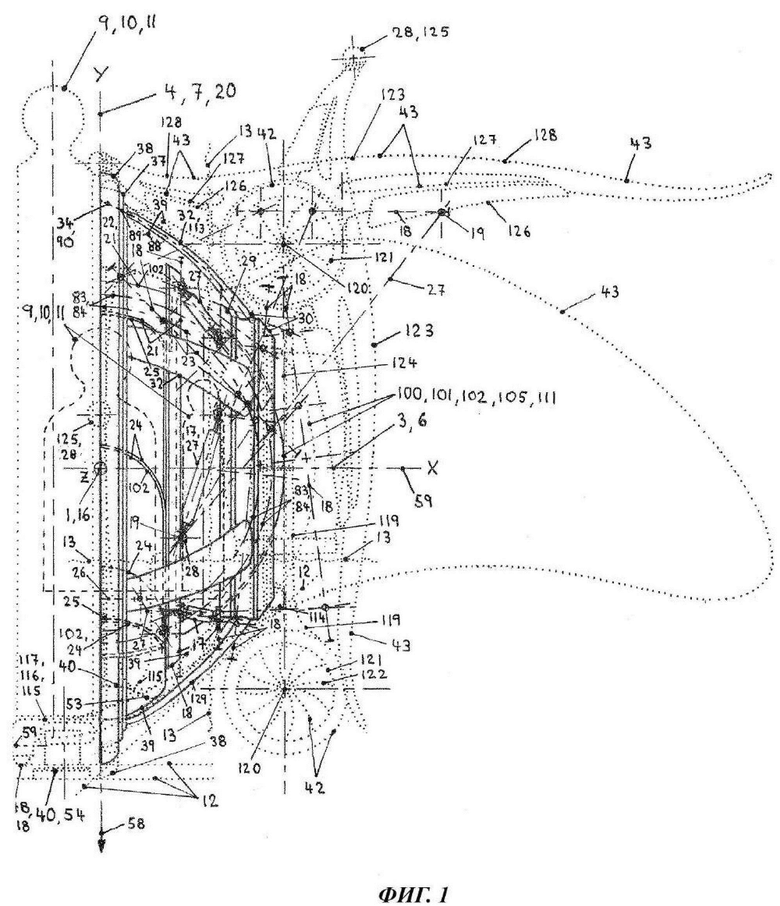
1. Транспортное средство, содержащее первую часть транспортного средства и вторую часть транспортного средства, при этом первая часть транспортного средства содержит первое ходовое колесо, установленное с возможностью вращения вокруг первой оси вращения, а вторая часть транспортного средства содержит второе ходовое колесо, установленное с возможностью вращения вокруг второй оси вращения,
при этом первое ходовое колесо и второе ходовое колесо имеют одинаковый диаметр ходового колеса,
при этом первый подшипник для вращающейся опоры первого ходового колеса и второй подшипник для вращающейся опоры второго колеса соединены друг с другом посредством шарнирного механизма таким образом, чтобы обеспечивать возможность изменения ориентации первой оси вращения и второй оси вращения относительно друг друга,
отличающееся тем, что указанное транспортное средство выполнено с возможностью плавного переведения при помощи шарнирного механизма из первой транспортной конфигурации с наклонными относительно друг друга первой и второй осью вращения во вторую транспортную конфигурацию с параллельными друг другу первой и второй осью вращения,
при этом во второй транспортной конфигурации расстояние от первой контактной поверхности первого ходового колеса до второй контактной поверхности второго колеса составляет менее одной десятой диаметра ходового колеса.
2. Транспортное средство по п. 1, отличающееся тем, что первое ходовое колесо и второе ходовое колесо в первой транспортной конфигурации и/или во второй транспортной конфигурации соприкасаются в области их окружностей.
3. Транспортное средство по п. 1 или 2, отличающееся тем, что первая часть транспортного средства и вторая часть транспортного средства выполнены в виде плоских боковых частей, в частности полуоболочек, которые совместно ограничивают приемное пространство, при этом радиальная протяженность полуоболочек составляет 75-100% диаметра ходового колеса.
4. Транспортное средство по п. 3, отличающееся тем, что диаметр ходового колеса составляет по меньшей мере 1,2 м, при этом приемное пространство содержит платформу для размещения по меньшей мере одного человека.
5. Транспортное средство по одному из пп. 1-4, отличающееся тем, что предусмотрена возможность перевода из первой во вторую транспортную конфигурацию и из второй в первую транспортную конфигурацию во время движения транспортного средства.
6. Транспортное средство по п. 5, отличающееся тем, что перевод между первой транспортной конфигурацией и второй транспортной конфигурацией предусмотрен автоматически в зависимости от скорости движения транспортного средства.
7. Транспортное средство по п. 6, отличающееся тем, что автоматический перевод предусмотрен под действием момента без дополнительного силового воздействия.
8. Транспортное средство по одному из пп. 1-7, отличающееся тем, что каждая из частей транспортного средства содержит двигатель с независимым управлением.
9. Транспортное средство по п. 8, отличающееся тем, что двигатели выполнены в виде электрических двигателей, при этом во внутренней части по меньшей мере одного статора одного из двигателей расположено несущее устройство для размещения принимаемых грузов.
10. Транспортное средство по п. 9, отличающееся тем, что двигатели представляют собой моментные двигатели.
11. Транспортное средство по одному из пп. 1-10, отличающееся тем, поворотная ось шарнирного механизма находится на радиальном расстоянии от первой оси вращения и от второй оси вращения, которое составляет по меньшей мере треть диаметра ходового колеса, в частности по меньшей мере 4/10 диаметра ходового колеса.
12. Транспортное средство по одному из пп. 1-11, отличающееся тем, что шарнирный механизм выполнен в виде параллельного кинематического шарнирного механизма.
13. Транспортное средство по одному из пп. 1-11, отличающееся тем, что шарнирный механизм выполнен в виде последовательного кинематического шарнирного механизма.
14. Транспортное средство по одному из пп. 1-13, отличающееся тем, что содержит опорный узел, который соединен с первой и второй частью транспортного средства, и по меньшей мере одну дополнительную платформу для контакта с грунтом.
15. Часть транспортного средства для транспортного средства по одному из пп. 1-14, содержащая ходовое колесо, установленное с возможностью вращения вокруг оси вращения, привод для ходового колеса и соединительный элемент для шарнирного механизма.
16. Система транспортных средств, содержащая по меньшей мере два транспортных средства по одному из пп. 1-14, которые соединены друг с другом механически, в частности, с возможностью отсоединения.
17. Система транспортных средств по п. 16, отличающееся тем, что указанные по меньшей мере два транспортных средства соединены друг с другом при помощи соединительной части, при этом соединительная часть содержит приемное пространство для размещения принимаемых грузов.
18. Способ трансформации транспортного средства, в частности транспортного средства по одному из пп. 1-13, между первой транспортной конфигурацией и второй транспортной конфигурацией, в котором
а) транспортное средство содержит первую часть транспортного средства и вторую часть транспортного средства, при этом первая часть транспортного средства содержит первое ходовое колесо, установленное с возможностью вращения вокруг первой оси вращения, а вторая часть транспортного средства содержит второе ходовое колесо, установленное с возможностью вращения вокруг второй оси вращения, при этом первое ходовое колесо и второе ходовое колесо имеют одинаковый диаметр ходового колеса, причем в способе
б) изменяют ориентацию первой оси вращения и второй оси вращения относительно друг друга, так что транспортное средство плавно переводят из первой транспортной конфигурации с наклонными относительно друг друга первой и второй осью вращения во вторую транспортную конфигурацию с параллельными друг другу первой и второй осью вращения.
| FR 3063274 A1, 31.08.2018 | |||
| JP H0692273 A, 05.04.1994 | |||
| US 7188694 B1, 13.03.2007 | |||
| US 2001042650 A1, 22.11.2001 | |||
| Приспособление для управления одномоторной двухканатной грейферной лебедкой | 1929 |
|
SU27337A1 |
