Изобретение относится к подъемно-транспортным механизмам, а именно к мобильным подъемникам с рабочими платформами и может быть использовано в различных сферах и отраслях - на производстве, при проведении строительно-монтажных, ремонтных и обслуживающих работ на высоте, в складских и гаражных комплексах и др.
Мобильные подъемники с рабочими платформами отличаются универсальностью и широкой сферой применения. Они предназначены для работ по монтажу и демонтажу оборудования на высоте, установке фонарей и светильников, замены ламп, декорирования и уборки высоких помещений, обслуживания или ремонта инженерных систем и коммуникаций, мойке автомобилей и пр. Они могут осуществлять вертикальный подъем и спуск оборудования или рабочего с инструментом и небольшим объемом материалов на высоту до 10 метров.
Мобильные подъемники с рабочими платформами относятся к свободностоящим грузоподъемным машинам, устойчивость которых обеспечивается только собственной силой тяжести. При работе они опираются на опускающиеся боковые страховочные упоры, что позволяет иметь необходимый запас устойчивости.
Вес мобильных подъемников может варьироваться от 400 до 600 кг, а габаритные размеры от 1200 до 1400 мм.
Благодаря компактности и легкости такие подъемники можно эксплуатировать на строительных площадках, вокзалах, стадионах, выставках, складах, цехах, театрах, учебных заведениях, торговых центрах и т.п.
Малые габаритные размеры мобильных подъемников дают возможность транспортировать их по узким проходам и коридорам, перемещать между этажами в грузовых лифтах. Малый вес позволяет использовать такие подъемники как на улице, так и в помещениях, где нагрузка на пол может быть лимитирована.
Мобильные подъемники с рабочими платформами оснащены колесной базой, которая позволяет передвигать их вручную на небольшие расстояния.
При транспортировке подъемников на большие расстояния используется транспортное средство, например, грузовые газели ГАЗ 2705, 27075, ГАЗ 3302 и т.п.
Загрузка и выгрузка подъемника из кузова транспортного средства может осуществляться персоналом вручную или при помощи погрузчика, вилы которого подводятся под его несущую раму.
Работы, выполняемые с применением подъемников с рабочими платформами, относятся к работам повышенной опасности, при выполнении которых могут иметь место травматизм и иные несчастные случаи, угрожающие здоровью и жизни персонала, вызванные, в частности:
- потерей устойчивости и опрокидыванием подъемника по различным причинам: высокое расположение центра тяжести, недостаточность опорного контура при использовании коротких аутригеров, непреднамеренное складывание аутригеров, недостаточная жесткость телескопической мачты, превышение пределов грузоподъемности при подъеме, превышение пределов грузоподъемности при спуске, отклонение мачты подъемника от вертикального положения и пр.;
- механизмами, подвижными и выступающими частями подъемника;
- техническими неисправностями узлов подъемника;
- сложностью и травмоопасностью операций по подготовке подъемника к работе и транспортировке.
Из уровня техники известна мобильная рабочая платформа для строительных и ремонтных работ, которые должны выполняться на высоте, превышающей высоту человека, см. US 5203425(A), WEHMEYER DONALD Т, 20.04.1993. Известная мобильная рабочая платформа содержит основание с комплектом колес, алюминиевую телескопическую мачту, состоящую из ступеней, соединенных между собой цепями, боковые раскосы, привод для движения мачты, выносные опоры с домкратами, рабочую платформу с ограждениями и скользящий по мачте передаточный бампер с системой роликов для облегчения загрузки платформы в грузовик. Основание платформы содержит шесть отверстий для установки выносных опор (выносная опора вставляется в основание до тех пор, пока она не коснется упора), расположенных следующим образом: два передних (т.е. направленных вперед) отверстия, расположенных на каждом конце основания; два задних отверстия, расположенные на обоих концах основания; одно левое отверстие, расположенное примерно в середине левой стороны основания; одно отверстие, направленное вправо, расположенное примерно в середине правой стороны основания. При использовании подъемника для фиксации основания используются четыре выносные опоры: одна направлена вправо; одна направлена влево; одна направлена вперед и расположен на одном конце (т.е. справа или слева) основания; и одна направлена назад и расположена на другом конце (то есть слева или справа) основания. Предпочтительная длина выносной опоры составляет около двух-трех футов (0,61 м - 0,91 м). Передаточный бампер может быть изготовлен из любого подходящего материала и предпочтительно из материала с высоким коэффициентом трения, такого как резина и т.п.Предпочтительная форма передаточного бампера - модифицированный прямоугольник, содержащий изогнутую поверхность снаружи и плоскую поверхность, примыкающую к мачте. В целях повышения безопасности персонала при подъеме, управление подъемником осуществляется двумя руками, что позволяет не допустить наклона оператора через ограждения и исключить дестабилизирующий фактор.
Недостатком указанной мобильной рабочей платформы является высокий риск травматизма эксплуатирующего персонала и как следствие недостаточная безопасность при подготовке подъемника к работе или транспортировке и при работе подъемника в расширенных эксплуатационных показателях (температура окружающей среды, погодные условия, ветровые нагрузки, грузоподъемность, высота и пр.), а также длительность и сложность подготовительных операций.
Указанные недостатки обусловлены:
- возможностью опрокидывания подъемника из-за недостаточной устойчивости при выполнении уличных работ (с порывами ветра до 12,5 м/с, на высоте более 10 м и др.), вызванной малой длиной выносных опор (от 0,61 м до 0,91 м), малой площадью опорного контура, высоким расположением центра тяжести подъемника, недостаточным осевым моментом сопротивления сечения выносных опор с винтовыми домкратами, недостаточной жесткостью телескопической мачты, вызванной применением параллельных раскосов для фиксации телескопической мачты, низким закреплением раскосов к мачте и выполнением мачты из алюминия;
- возможностью опрокидывания подъемника при движении телескопической мачты как вверх, так и вниз с оборудованием или грузом, превышающим пределы допустимого;
- возможностью опрокидывания подъемника при движении телескопической мачты под углом, превышающим допустимый угол наклона;
- возможностью несанкционированного опускания подъемника вниз при нештатной поломке любых элементов гидросистемы и загрязнением атмосферы и персонала при штатном срабатывании предохранительного клапана при использовании подъемника в расширенных диапазонах температур вследствие изменения вязкости масла;
- наличием выступающих частей - ручек выносных опор;
- применяемой системой развертывания аутригеров, которая требует установки работниками вручную тяжелых выносных опор в отверстия основания и их извлечение обратно перед транспортировкой;
- отсутствием возможности снятия рабочей платформы при проведении подготовительных операций, а именно отсутствие возможности уменьшения веса подъемника и снижения его центра тяжести для осуществления ручной погрузки в транспортное средство;
- конструкцией передаточного бампера и переворотного рычага. Использование переворотного рычага в форме трубы предполагает, что для погрузки подъемника в транспортное средство, работник одной рукой поднимает рычаг вверх, а второй рукой придерживает подъемник. Приложение силы к одной точке рамы подъемника вызывает появление крутящего момента в данной точке, что при значительном весе подъемника может привести к его перевороту и падению. Использование жесткого передаточного бампера скругленной формы может привести к незапланированному проскальзыванию изделия под своим весом (ввиду отсутствия опоры вокруг которой осуществляется переворот);
- отсутствием мест хранения инструмента и личных вещей оператора. При отсутствии мест хранения инструмента и личных вещей оператора персонал вынужден переносить указанные вещи в руках. На практике, при необходимости проведения ручных операций внизу, инструмент и личные вещи откладываются на пол. Таким образом, работники, сконцентрированные на выполнении задачи, зачастую спотыкаются о вещи и инструмент, что приводит к их падению, в том числе на выступающие части подъемника. При проведении работ на высоте инструмент и личные вещи располагаются работниками на полу рабочей платформы или на иных частях подъемника, не предназначенных для размещения инструмента, откуда инструмент падает и наносит травму персоналу, стоящему внизу.
Кроме того, система развертывания аутригеров, конструкция передаточного бампера и переворотного рычага, а также отсутствие возможности снятия рабочей платформы дополнительно усложняют и замедляют процесс перевода основания из транспортного положения (с извлеченными выносными опорами) в рабочее и наоборот, а также выгрузку и погрузку подъемника в транспортное средство.
Из уровня техники известен телескопический подъемник, содержащий базовую раму с колесами, на которой установлена выдвижная телескопическая мачта, ограниченная боковыми раскосами, рабочую платформу с ограждениями и переворотный узел, включающий упор, ролики и переворотный рычаг, см. US 5121816 (А), 16.06.1992, GENIE IND INC. Базовая рама подъемника снабжена горизонтально расположенными передними и задними выносными опорами, расположенными так, что они выступают вправо и влево, и продольными выносными опорами, выступающими вперед и назад для стабилизации подъемника. Указанные выносные опоры установлены с возможностью скольжения в соответствующих втулках, составляющих часть базовой рамы. Выносные опоры имеют соответствующие винтовые домкраты, установленные рядом с их внешними концами для выравнивания базовой рамы и выносных опор как единого целого и для восприятия нагрузки. Винтовые домкраты зацепляются быстроразъемными гайками, шарнирно соединенными с каждой выносной опорой и приводятся в действие подпружиненными рычагами. Выдвижение мачты осуществляется при помощи гидравлического цилиндра, в который подается жидкость под давлением с помощью насоса, приводимого в действие электродвигателем.
Недостатком указанного телескопического подъемника также является высокий риск травматизма эксплуатирующего персонала и как следствие недостаточная безопасность при подготовке подъемника к работе или транспортировке и при работе подъемника в расширенных эксплуатационных показателях (температура окружающей среды, погодные условия, ветровые нагрузки, грузоподъемность, высота и пр.), а также длительность и сложность подготовительных операций.
Высокий риск травматизма и как следствие низкая безопасность при использовании основания обусловлен:
- возможностью опрокидывания подъемника из-за недостаточной устойчивости при выполнении уличных работ (с порывами ветра до 12,5 м/с на высоте более 10 м, расширенные диапазоны температур и др.), вызванной малой площадью опорного контура, высоким расположением центра тяжести подъемника, недостаточным осевым моментом сопротивления сечения выносных опор с винтовыми домкратами, недостаточной жесткостью телескопической мачты, вызванной применением параллельных раскосов для фиксации телескопической мачты, низким закреплением раскосов к мачте и выполнением мачты из алюминия; рама представляет собой каркас прямоугольной формы, в пределах которого не размещено тяжелое оборудование, а источник питания расположен на мачте; при данной конфигурации центр тяжести подъемника расположен высоко, что снижает его устойчивость;
- возможностью опрокидывания подъемника при движении телескопической мачты как вверх, так и вниз с оборудованием или грузом, превышающим пределы допустимого. Движение мачты вверх и вниз зависит только от правильной фиксации выносных опор в основании и домкратами. Таким образом, использование подъемника является недостаточно безопасным в ситуациях когда масса груза на платформе превысит допустимую (как при движении вверх, так и при движении вниз).
- возможностью опрокидывания подъемника при движении телескопической мачты под углом, превышающим допустимый угол наклона. Движение мачты вверх и вниз зависит только от правильной фиксации выносных опор в основании и домкратами. Таким образом, использование подъемника является недостаточно безопасным при отклонении мачты от вертикали.
- возможностью несанкционированного опускания подъемника вниз при нештатной поломке любых элементов гидросистемы и загрязнением атмосферы и персонала при штатном срабатывании предохранительного клапана при использовании подъемника в расширенных диапазонах температур вследствие изменения вязкости масла;
- наличием выступающих частей - ручек выносных опор;
- применяемой системой развертывания выносных опор, которая требует установки работниками вручную тяжелых деталей в отверстия основания и их извлечение обратно перед транспортировкой. Данная система дополнительно усложняет и замедляет процесс перевода основания из транспортного положения (с извлеченными выносными опорами) в рабочее положение и наоборот.
- отсутствием возможности снятия рабочей платформы при проведении подготовительных операций, а именно отсутствие возможности уменьшения веса подъемника и снижения центра тяжести для осуществления ручной погрузки в транспортное средство;
- расположением источника питания на телескопической мачте, а также формой поворотного узла. Такое расположение источника питания не позволяет обеспечить ровную поверхность мачты, на которую подъемник укладывается в транспортное средство, за счет чего не обеспечивается устойчивость базовой рамы при транспортировке. Исходя из конструкции узла расположения рычага для переворота рамы в транспортное положение, расположенного под рамой - рычаг представляет собой трубу квадратного сечения и позволяет осуществить приложение силы только в одной точке. Такая конструкция рычага предполагает, что работник одной рукой поднимает рычаг вверх, а второй рукой придерживает подъемник. Приложение силы к одной точке рамы подъемника вызывает появление крутящего момента в данной точке, что, учитывая его значительный вес, может привести к перевороту подъемника. Кроме того, данная операция является сложной в осуществлении.
- отсутствием мест хранения инструмента и личных вещей оператора. При отсутствии мест хранения инструмента и личных вещей оператора персонал вынужден переносить указанные вещи в руках. На практике, при необходимости проведения ручных операций внизу, инструмент и личные вещи откладываются на пол. Таким образом, работники, сконцентрированные на выполнении задачи, зачастую спотыкаются о вещи и инструмент, что приводит к их падению, в том числе на выступающие части подъемника. При проведении работ на высоте инструмент и личные вещи располагаются работниками на полу рабочей платформы или на иных частях подъемника, не предназначенных для размещения инструмента, откуда инструмент падает и наносит травму персоналу, стоящему внизу.
К наиболее близкому аналогу заявленного телескопического подъемника (прототипу) можно отнести раскрытые в статье «Обзор передвижных мачтовых подъемников GTWY и их применения», опубликованной 22.09.2017 на сайте https://stroitelnaya-lyulka.ru/polezno-znat/66-obzor-peredvizhnykh-machtovykh-pod-emnikov-gtwy-i-ikh-primeneniya.html и в статье «Обзор мачтового телескопического подъемника Double Mast», опубликованной 20.05.2014 на сайте https://gortorgsnab.ru/articles/obzor-machtovogo-teleskopicheskogo-podemnika-double-mast/, мачтовые подъемники GTWY.
Мачтовые подъемники GTWY прямоугольную раму на колесах, боковые раскосы, складные аутригеры, телескопическую мачту (при одномачтовом исполнении) или две телескопических мачты (при двухмачтовом исполнении). При установке основания в рабочее положение колеса фиксируются тормозом. Аутригеры имеют винтовую регулировку для точного выравнивания. Для контроля процесса выравнивания подъемника в конструкции предусмотрен уровень. Также основание подъемника содержит рычаг для перемещения с прорезиненной ручкой, который используется для переворота основания из рабочего вертикального положения в горизонтальное положение для транспортировки. Рычаг для перемещения представляет собой профильную трубу квадратного сечения и крепится сверху рамы основания. Для перевода основания в транспортное положение аутригеры поднимаются вверх или складываются вдоль прямоугольной рамы.
Использование в прототипе складных аутригеров позволяет снизить риск травматизма при развертывании выносных опор, ускорить и упростить операции по переводу основания в рабочее и транспортное положение. Однако иные недостатки предшествующего уровня техники сохраняются.
Недостатком указанного телескопического подъемника является высокий риск травматизма эксплуатирующего персонала и как следствие недостаточная безопасность при подготовке подъемника к работе или транспортировке и при работе подъемника в расширенных эксплуатационных показателях (температура окружающей среды, погодные условия, ветровые нагрузки, грузоподъемность, высота и пр.), а также длительность и сложность подготовительных операций.
Указанные недостатки обусловлены:
- возможностью опрокидывания подъемника из-за недостаточной устойчивости, вызванной малыми размерами аутригеров и риском их непреднамеренного складывания во время работы. Для возможности складывания аутригеров вдоль рамы основания подъемника, размер каждого аутригера прототипа не превышает половины длины основания. Таким образом, получаемый опорный контур не обеспечивает устойчивости основания для выполнения работ на высоте 10 м или при порывах ветра 12,5 м/с и горизонтальной ручной нагрузке 200Н, т.е. использование указанного подъемника для выполнения работ является небезопасным.
- возможностью опрокидывания подъемника из-за недостаточной жесткости телескопической мачты при расширенных эксплуатационных показателях, вызванной применением параллельных раскосов для фиксации телескопической мачты (при боковых порывах ветра параллельные раскосы не воспринимают нагрузку на сжатие/растяжение, а воспринимают нагрузку на срез и поперечный изгиб, что добавляет дополнительную нагрузку в виде поперечного изгиба на телескопическую мачту), низким расположением точки крепления раскосов к телескопической мачте, выполнением мачты из алюминия, который не обеспечивает жесткости конструкции при температуре ниже -10°С и других расширенных эксплуатационных показателях (сила ветра 12,5 м/с, высота 10 м).
- возможностью опрокидывания подъемника при движении телескопической мачты как вверх, так и вниз с оборудованием или грузом, превышающим пределы допустимого.
- возможностью опрокидывания подъемника при движении телескопической мачты под углом, превышающим допустимый угол наклона.
- возможностью несанкционированного опускания подъемника вниз при нештатной поломке любых элементов гидросистемы и загрязнением атмосферы и персонала при штатном срабатывании предохранительного клапана при использовании подъемника в расширенных диапазонах температур вследствие изменения вязкости масла;
- наличием выступающих частей - четырех ручек аутригеров.
- отсутствием возможности снятия рабочей платформы при проведении подготовительных операций, а именно отсутствие возможности уменьшения веса подъемника и снижении центра тяжести для осуществления ручной погрузки в транспортное средство;
- конструкцией поворотного узла, а также отсутствием специализированного узла для зацепления с погрузчиком. В конструкцию поворотного узла входит рычаг для переворота основания из рабочего положения в транспортное. Выполнение рычага для переворота в виде трубы квадратного сечения позволяет осуществить приложение силы только в одной точке. Такая конструкция рычага предполагает, что работник одной рукой поднимает рычаг вверх, а второй рукой придерживает подъемник. Приложение силы к одной точке основания вызывает появление крутящего момента в данной точке, что, учитывая значительный вес подъемника, может привести к его перевороту и падению. Кроме того, учитывая вес и габаритные размеры конструкции, данная операция является сложной в осуществлении. При использовании для загрузки подъемника в транспортное средство вилочного погрузчика - операция также является небезопасной, ввиду того, что при зацеплении подъемника «под раму» существует риск его соскальзывания и падения.
- отсутствием мест хранения инструмента и личных вещей оператора. При отсутствии мест хранения инструмента и личных вещей оператора персонал вынужден переносить указанные вещи в руках. На практике, при необходимости проведения ручных операций внизу, инструмент и личные вещи откладываются на пол. Таким образом, работники, сконцентрированные на выполнении задачи, зачастую спотыкаются о вещи и инструмент, что приводит к их падению, в том числе на выступающие части подъемника. При проведении работ на высоте инструмент и личные вещи располагаются работниками на полу рабочей платформы или на иных частях подъемника, не предназначенных для размещения инструмента, откуда инструмент падает и наносит травму персоналу, стоящему внизу.
Поскольку работы, выполняемые с применением подъемников с рабочими платформами, связаны с подъемом людей и грузов, их относят к работам повышенной опасности, что требует безусловного соблюдения требований безопасности, изложенных в нормативных правовых актах, технических стандартах и регламентах.
Однако на практике указанные требования зачастую не соблюдаются. Не уделяется должного внимания техническому состоянию подъемных сооружений, соответствию подъемных сооружений требованиям нормативных документов и соблюдению установленных требований безопасности труда при их использовании. Не всегда обеспечивается эффективный контроль за применением работниками безопасных приемов в работе, выполнением требований, изложенных в инструкциях по охране труда, а также правильным применением средств коллективной и индивидуальной защиты.
Ввиду чего в настоящее время возможными вариантами снижения риска травматизма и иных несчастных случаев при использовании мобильных подъемников с рабочими платформами является:
- повышение надежности работы подъемного оборудования и его узлов;
- повышение удобства эксплуатации (исключение травмоопасных операций по подготовке оборудования к работе или транспортировке);
- автоматизация контроля безопасности.
Таким образом, задачей изобретения является создание надежного, безопасного мобильного подъемника с рабочей платформой, способного работать в расширенных эксплуатационных показателях, при этом обладающего повышенным удобством эксплуатации.
Технический результат заявленного изобретения заключается в повышении безопасности использования подъемника в расширенных эксплуатационных показателях, т.е. снижении риска травматизма и иных несчастных случаев при подготовке подъемника к работе или транспортировке, а также при работе подъемника в расширенных эксплуатационных показателях (температура окружающей среды, погодные условия, ветровые нагрузки, грузоподъемность, высота и пр.), путем повышения надежности работы подъемника и его узлов в расширенных условиях эксплуатации, исключения травмоопасных операций по подготовке подъемника к работе или транспортировке, автоматизации контроля безопасности и повышении удобства эксплуатации при одновременном упрощении и повышении скорости подготовительных операций.
Техническая задача решается, а технический результат достигается тем, что телескопический подъемник содержащий стальную раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, закрепленные на раме и телескопической мачте боковые стальные раскосы, привод выдвижения телескопической мачты и складные стальные аутригеры, шарнирно установленные на осях по углам рамы, отличается тем, что рама подъемника содержит полый каркас из труб квадратного сечения с накладками, расположенными сверху и снизу каркаса, соединенными между собой ребрами жесткости, причем длина одной стороны рамы больше другой стороны рамы по меньшей мере на ширину аутригера, низ рамы усилен сплошным листом, снабжен по меньшей мере одним отсеком для хранения оборудования, инструмента или личных вещей оператора, в полом каркасе рамы предусмотрены ответные отверстия для вил погрузчика, форма которых соответствует форме вил погрузчика, каждый аутригер содержит пружинный фиксатор и домкрат, включающий гильзу квадратного сечения, внутри которой через антифрикционные втулки круглого сечения установлен квадратный шток с винтом, соединенный с шаровой опорой, установленной в основании, боковые раскосы подъемника не параллельны друг другу, а крепление боковых раскосов к телескопической мачте выполнено в самой верхней точке стационарной части телескопической мачты через кронштейн.
В предпочтительном варианте выполнения изобретения рама содержит два отсека для хранения оборудования, инструмента или личных вещей оператора, один из которых предназначен для хранения аккумуляторной батареи.
В предпочтительном варианте выполнения изобретения рама подъемника выполнена из стали 09Г2С с толщиной стенок труб каркаса не менее 3 мм, толщиной накладок не менее 4 мм и толщиной усиливающего листа не менее 8 мм.
В предпочтительном варианте выполнения изобретения аутригеры и боковые раскосы подъемника также выполнены из стали 09Г2С.
Дополнительно телескопический подъемника может содержать переворотный узел, который включает переворотный рычаг П-образной формы, телескопически расположенный в полом каркасе, блок колес, жестко закрепленный на стационарной части телескопической мачты, фиксатор, состоящий из скобы и подпружиненного штифта, закрепленного на стационарной части телескопической мачты, упорный блок, установленный на стационарной части телескопической мачты с возможностью перемещения вдоль нее, и лыжи, расположенные на тыльной стороне рамы, при этом упорный блок включает две боковины, распорки, соединяющие боковины между собой, откидной крючок и скребок, шарнирно установленный в боковинах при помощи оси скребка.
Дополнительно рабочая платформа подъемника может быть установлена на телескопическую мачту с возможностью оперативного снятия посредством нижнего и верхнего захвата, при этом нижний захват представляет собой нижний кронштейн с крюками, а верхний захват состоит из верхнего кронштейна с крюками, в пазах которого шарнирно установлена откидная скоба с подпружиненным фиксатором и содержащая на боковых планках углубления под трубу ограждения рабочей платформы.
При этом рабочая платформа подъемника может содержать по меньшей мере один инструментальный отсек, съемно установленный на ней. А в предпочтительном варианте выполнения изобретения рабочая платформа подъемника содержит два инструментальных отсека, съемно установленных на ней.
Также техническая задача решается, а технический результат достигается тем, что телескопический подъемник содержащий стальную раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, включающей две параллельные ветви цепи, выходящие из держателей, установленных сверху на боковой поверхности секций телескопической мачты, проходящие через верхние блоки, расположенные на осях сверху на торцевой поверхности секций подвижной части телескопической мачты, и приходящие в натяжители, установленные снизу через планки на секциях подвижной части телескопической мачты таким образом, что каждая секция телескопической мачты соединена двумя параллельными ветвями цепей с секцией, стоящей перед предыдущей секцией, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, выполненным из верхних и нижних труб, закрепленные на раме и телескопической мачте боковые стальные раскосы, привод выдвижения телескопической мачты и складные стальные аутригеры, шарнирно установленные на осях по углам рамы, отличается тем, что привод движения телескопической мачты состоит из двигателя постоянного тока, червячного редуктора, упорного стакана с подшипником, ходового винта и гайки, при этом двигатель постоянного тока и червячный редуктор закреплены к сплошному листу рамы снизу, а упорный стакан - сверху, дополнительно подъемник содержит контроллер, ограничивающий предельную нагрузку на рабочую платформу и угол наклона мачты относительно горизонта, датчик силы и датчик угла наклона телескопической мачты, связанные с контроллером и расположенные на телескопической мачте, блочно-цепная система телескопической мачты дополнительно включает нижний блок, установленный на последней секции подвижной части телескопической мачты, при этом цепь, проходящая через него, закреплена с натяжителем через датчик силы, а датчик угла наклона установлен внизу стационарной части телескопической мачты в пазу.
В предпочтительном варианте выполнения изобретения телескопическая мачта выполнена из алюминиевого сплава 6082Т66.
Кроме того техническая задача решается, а технический результат достигается тем, что телескопический подъемник содержащий раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, закрепленные на раме и телескопической мачте боковые раскосы, привод выдвижения телескопической мачты, складные аутригеры, шарнирно установленные на осях по углам рамы и переворотный узел, отличается тем, что переворотный узел включает переворотный рычаг П-образной формы, телескопически расположенный в полом каркасе, блок колес, жестко закрепленный на стационарной части телескопической мачты, фиксатор, состоящий из скобы и подпружиненного штифта, закрепленного на стационарной части телескопической мачты, упорный блок, установленный на стационарной части телескопической мачты с возможностью перемещения вдоль нее, и лыжи, расположенные на тыльной стороне рамы, при этом упорный блок включает две боковины, распорки, соединяющие боковины между собой, откидной крючок и скребок, шарнирно установленный в боковинах при помощи оси скребка.
Кроме того техническая задача решается, а технический результат достигается тем, что телескопический подъемник содержащий стальную раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, включающей две параллельные ветви цепи, выходящие из держателей, установленных сверху на боковой поверхности секций телескопической мачты, проходящие через верхние блоки, расположенные на осях сверху на торцевой поверхности секций подвижной части телескопической мачты, и приходящие в натяжители, установленные снизу через планки на секциях подвижной части телескопической мачты таким образом, что каждая секция телескопической мачты соединена двумя параллельными ветвями цепей с секцией, стоящей перед предыдущей секцией, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, выполненным из верхних и нижних труб, закрепленные на раме и телескопической мачте боковые стальные раскосы, привод выдвижения телескопической мачты, складные стальные аутригеры, шарнирно установленные на осях по углам рамы и переворотный узел, отличается тем, что рама подъемника содержит полый каркас из труб квадратного сечения с накладками, расположенными сверху и снизу каркаса, соединенными между собой ребрами жесткости, причем длина одной стороны рамы больше другой стороны рамы по меньшей мере на ширину аутригера, низ рамы усилен сплошным листом, снабжен по меньшей мере одним отсеком для хранения оборудования, инструмента или личных вещей оператора, в полом каркасе рамы предусмотрены ответные отверстия для вил погрузчика, форма которых соответствует форме вил погрузчика, каждый аутригер содержит пружинный фиксатор и домкрат, включающий гильзу квадратного сечения, внутри которой через антифрикционные втулки круглого сечения установлен квадратный шток с винтом, соединенный с шаровой опорой, установленной в основании, боковые раскосы подъемника не параллельны друг другу, а крепление боковых раскосов к телескопической мачте выполнено в самой верхней точке стационарной части телескопической мачты через кронштейн, привод движения телескопической мачты состоит из двигателя постоянного тока, червячного редуктора, упорного стакана с подшипником, ходового винта и гайки, при этом двигатель постоянного тока и червячный редуктор закреплены к сплошному листу рамы снизу, а упорный стакан - сверху, дополнительно подъемник содержит контроллер, ограничивающий предельную нагрузку на рабочую платформу и угол наклона мачты относительно горизонта, датчик силы и датчик угла наклона телескопической мачты, связанные с контроллером и расположенные на телескопической мачте, блочно-цепная система телескопической мачты дополнительно включает нижний блок, установленный на последней секции подвижной части телескопической мачты, при этом цепь, проходящая через него, закреплена с натяжителем через датчик силы, а датчик угла наклона установлен внизу стационарной части телескопической мачты в пазу, рабочая платформа установлена на телескопическую мачту с возможностью оперативного снятия посредством нижнего и верхнего захвата, при этом нижний захват представляет собой нижний кронштейн с крюками, а верхний захват состоит из верхнего кронштейна с крюками, в пазах которого шарнирно установлена откидная скоба с подпружиненным фиксатором и содержащая на боковых планках углубления под трубу ограждения рабочей платформы, переворотный узел включает переворотный рычаг П-образной формы, телескопически расположенный в полом каркасе, блок колес, жестко закрепленный на стационарной части телескопической мачты, фиксатор, состоящий из скобы и подпружиненного штифта, закрепленного на стационарной части телескопической мачты, упорный блок, установленный на стационарной части телескопической мачты с возможностью перемещения вдоль нее, и лыжи, расположенные на тыльной стороне рамы, при этом упорный блок включает две боковины, распорки, соединяющие боковины между собой, откидной крючок и скребок, шарнирно установленный в боковинах при помощи оси скребка.
При этом в предпочтительном варианте выполнения изобретения рама содержит два отсека для хранения оборудования, инструмента или личных вещей оператора, один из которых предназначен для хранения аккумуляторной батареи.
В предпочтительном варианте выполнения изобретения рама подъемника выполнена из стали 09Г2С с толщиной стенок труб каркаса не менее 3 мм, толщиной накладок не менее 4 мм и толщиной усиливающего листа не менее 8 мм.
Кроме того, в предпочтительном варианте выполнения изобретения аутригеры и боковые раскосы подъемника также выполнены из стали 09Г2С.
Рабочая платформа подъемника может содержать по меньшей мере один инструментальный отсек, съемно установленный на ней. А в предпочтительном варианте выполнения изобретения рабочая платформа содержит два инструментальных отсека, съемно установленных на ней.
Кроме того, в предпочтительном варианте выполнения изобретения телескопическая мачта выполнена из алюминиевого сплава 6082Т66.
Таким образом, следует отметить, что техническая задача решается, а технический результат достигается посредством раскрытых в заявленном изобретении узлов телескопического подъемника, таких как рама, телескопическая мачта, переворотный узел, привод выдвижения телескопической мачты, датчики контроля безопасности и рабочая платформа. В связи с чем, для специалиста в данной области техники должно быть очевидно, что техническая задача может быть решена, а технический результат может быть достигнут, как применением в телескопическом подъемнике одновременно всех узлов, раскрытых в изобретении, так и в различных их комбинациях, изложенных выше.
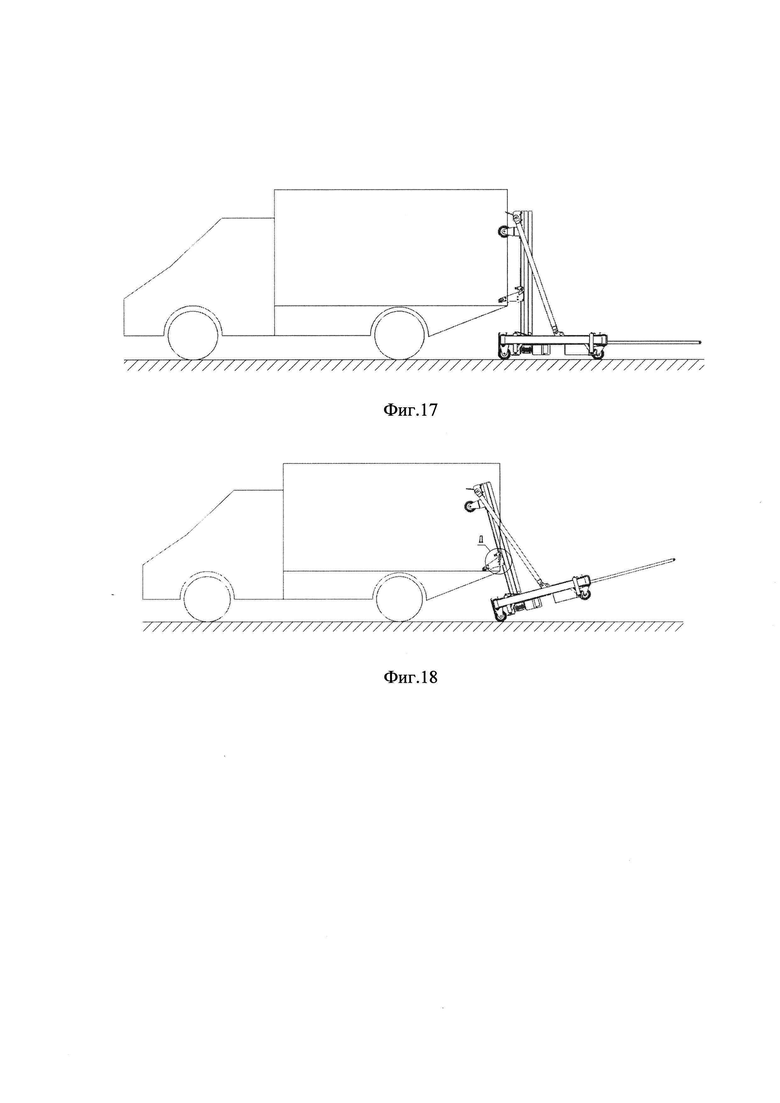
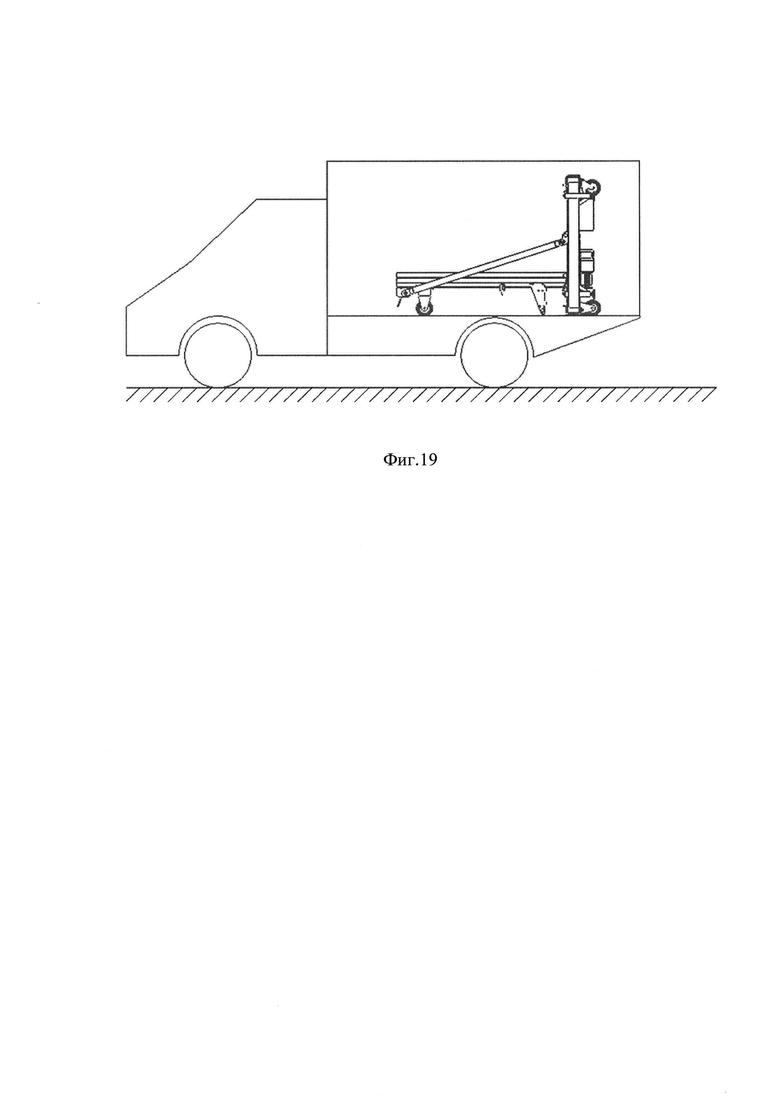
Изобретение поясняется графически, где на фиг. 1 изображен общий вид заявленного телескопического подъемника в транспортном положении, на фиг. 2 - общий вид заявленного телескопического подъемника в рабочем положении, на фиг. 3 - общий вид рамы телескопического подъемника, на фиг. 4 - вид снизу телескопического подъемника, на фиг. 5 - вид В на фигуре 2, фиг. 6 - домкрат аутригера в разрезе, фиг. 7 - телескопическая мачта подъемника, фиг. 8 - вид Л на фиг. 7, фиг. 9 - вид М на фиг. 7, фиг. 10 - вид сзади телескопического подъемника в рабочем положении с раскрытой телескопической мачтой, фиг. 11 - общий вид телескопического подъемника, снабженного переворотным узлом, фиг. 12 - упорный блок переворотного узла (вид Г на фигуре 11), фиг. 13 - рабочая платформа телескопического подъемника с узлом крепления, фиг. 14 - узел крепления рабочей платформы телескопического подъемника к телескопической мачте (вид П на фиг. 13), фиг. 15 - нижний захват узла крепления рабочей платформы телескопического подъемника к телескопической мачте, фиг. 16 - верхний захват узла крепления рабочей платформы телескопического подъемника к телескопической мачте, фиг. 17 - положение телескопического подъемника до погрузки в транспортное средство, фиг. 18 - положение телескопического подъемника при переводе из рабочего положения в транспортное (момент погрузки), фиг. 19 - телескопический подъемник в момент транспортировки.
Позициями на фиг. 1-19 обозначены:
1 - рама
2 - колесная база
3 - телескопическая мачта
4 - рабочая платформа
5 - боковые раскосы
6 - привод
7 - складные аутригеры
8 - полый каркас
9 - накладки
10 - ребра жесткости
11 - силовой лист
12 - отсек для хранения инструментов
13 - отсек для хранения аккумуляторной батареи
15 - ось для крепления аутригеров
16 - пружинный фиксатор
17- домкрат
18 - гильза
19 - крышка
20 - основание
21 - антифрикционные втулки круглого сечения
22 - квадратный шток
23 - шаровая опора
24 - втулка
25 - винт
26 - стационарная (неподвижная) часть телескопической мачты
27 - подвижная часть телескопической мачты
28 - цепь
29 - держатели
30 - натяжители
31 - верхние блоки
32 - нижний блок
33 - датчик силы
34 - датчик контроля угла наклона
35 - ограждение
36 - рифленое основание
37 - входная планка
38 - ограничители
39 - инструментальный лоток
40 - нижний захват
41 - верхний захват
42 - нижний кронштейн
43 - верхний кронштейн
44 - пазы
45 - откидная скоба
46 - пружинный фиксатор
47 - оси
48 - пружина растяжения
49 - педаль
50 - проушины
51 - двигатель постоянного тока
52 - червячный редуктор
53 - упорный стакан с подшипником
54 - ходовой винт
55 - гайка
56 - переворотный рычаг
57 - блок колес
58 - упорный блок
59 - фиксатор
60 - лыжи
61 - боковины
62 - распорка
63 - скребок
64 - ось скребка
65 - откидной крючок
66 - скоба
67 - подпружиненный штифт
68 - планка
69 - ответные отверстия для вил погрузчика
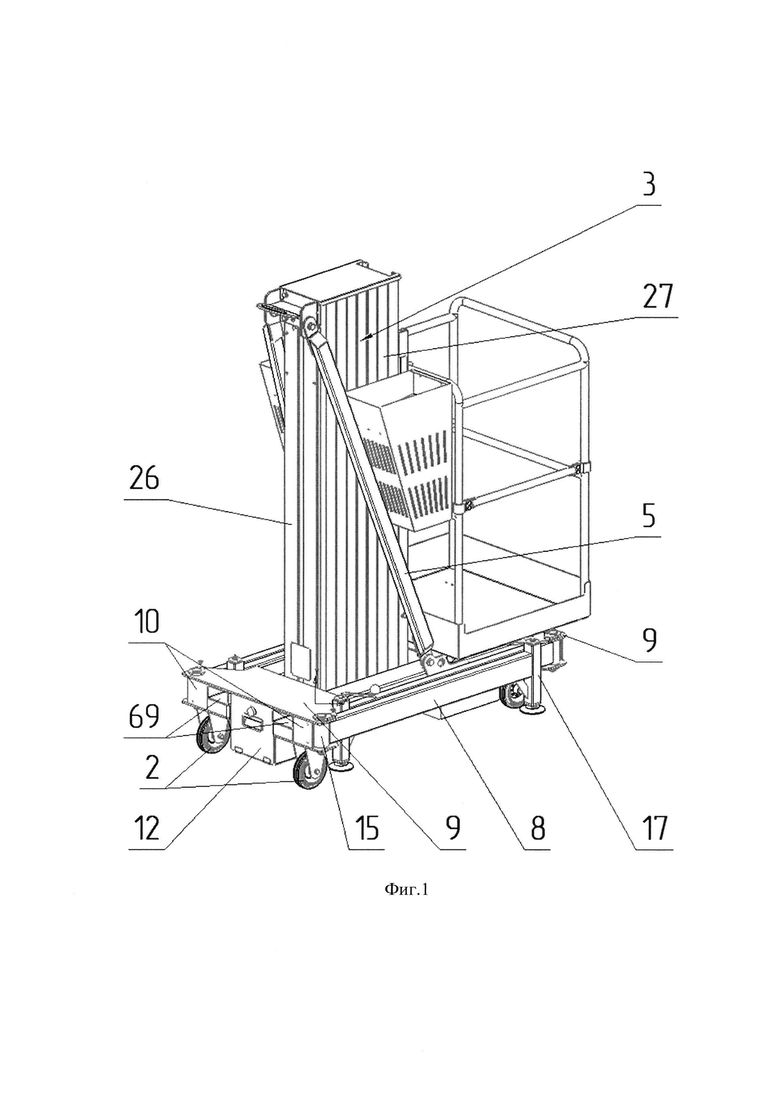
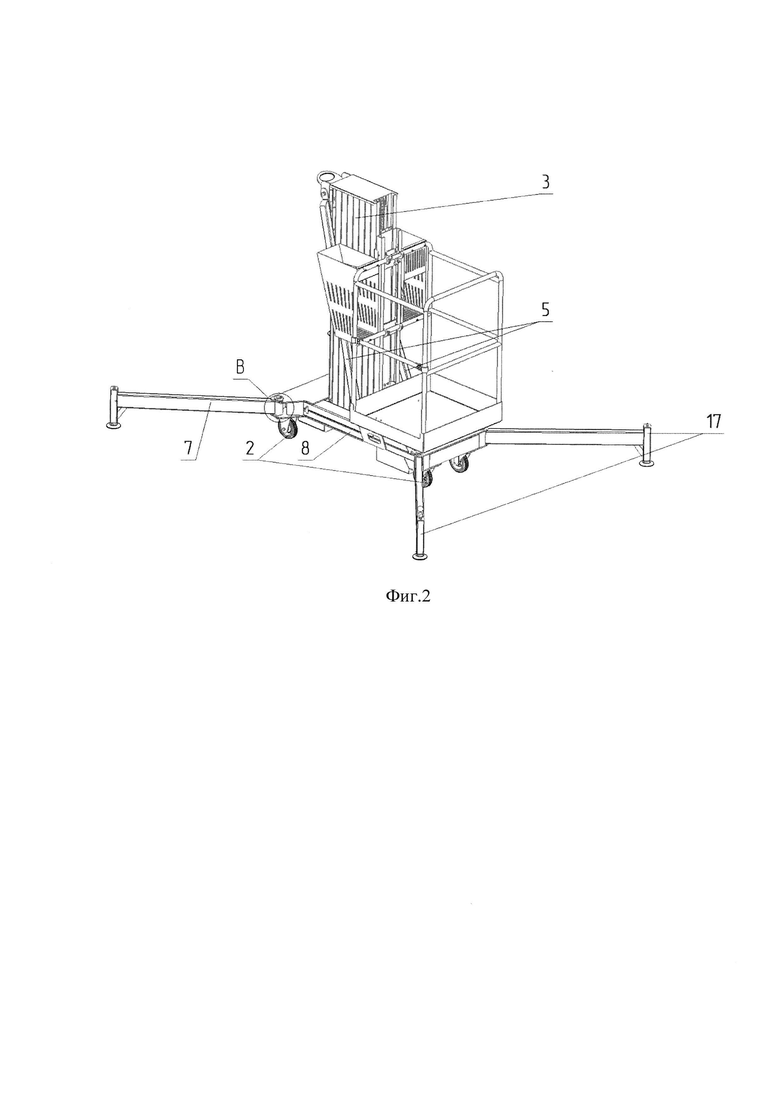
Заявленный телескопический подъемник, общий вид которого представлен на фиг. 1, 2 и 11 содержит стальную раму (1) на колесной базе (2), зафиксированную на раме телескопическую мачту (3), расположенную на подвижной части телескопической мачты рабочую платформу (4), закрепленные на раме и телескопической мачте стальные боковые раскосы (5), привод выдвижения телескопической мачты (6) и складные стальные аутригеры (7), шарнирно установленные на осях по углам рамы (1).
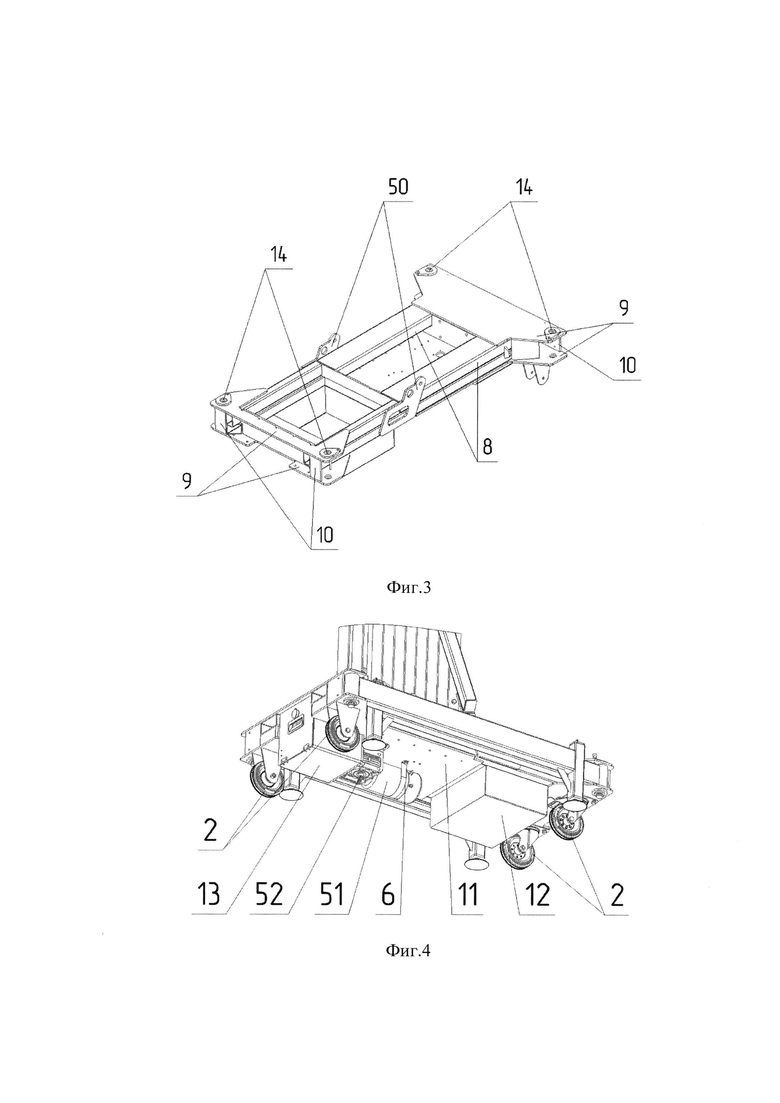
Рама (1), подробно иллюстрируемая на фиг. 3, представляет собой несущую конструкцию телескопического подъемника и служит остовом, на котором закреплены все узлы основания. Рама (1) установлена на колесной базе (2), которая состоит из двух передних поворотных колес со стояночным тормозом и двух задних неподвижных колес, что позволяет транспортировать основание в пространстве при наличии большого количества поворотов.
Рама (1) включает полый каркас (8), выполненный из труб квадратного сечения, уложенных в 2 ряда друг на друга, с накладками (9). Верхние и нижние накладки (9) соединены между собой стальными ребрами жесткости (10), образуя тем самым коробчатое сечение, уменьшающее прогиб накладок (9) относительно рамы (1). Данные конструктивные решения позволяют усилить жесткость рамы (1) подъемника и увеличить устойчивость подъемника при работе с большей грузоподъемностью, на большей высоте, при порывах ветра до 12,5 м/с.
Как видно на фиг. 4 низ рамы (1) усилен стальным силовым сплошным листом (11), а также двумя отсеками: отсеком для хранения инструмента или личных вещей оператора (12) и отсеком для аккумуляторной батареи (13). Отсеки (12, 13) представляют собой коробчатые конструкции, сваренные из стальных листов. За счет данных конструктивных решений также повышается жесткость конструкции рамы (1), а центр масс рамы (1) смещается как можно ниже к земле, что повышает устойчивость подъемника при работе в расширенных диапазонах эксплуатационных характеристик, за счет чего повышается безопасность использования подъемника.
Кроме того, наличие отсеков (12, 13) позволяет оператору хранить оборудование, инструмент и личные вещи в закрытых местах, что также повышает безопасность персонала при эксплуатации подъемника.
Накладки (9) представляют собой стальные листы фигурной формы и расположены сверху и снизу полого каркаса (8) с образованием четырех углов рамы (1) таким образом, что длина одной стороны рамы больше другой стороны рамы по меньшей мере на ширину аутригера. Выполнение рамы (1) таким образом позволяет использовать в конструкции подъемника складные аутригеры (7), длина которых может быть равной длине рамы (1) и при этом полностью складываться в транспортное положение без выступающих частей. Это значительно увеличивает опорный конур подъемника и соответственно повышает его устойчивость во время работы, снижая риск опрокидывания подъемника, при этом позволяет получить ровный компактный контур для транспортировки, позволяя легко и безопасно осуществить выгрузку и загрузку подъемника в транспортное средство.
В углу каждой накладки (9) выполнено сквозное отверстие (14), предназначенное для установки оси для крепления аутригеров (15).
На осях для установки оси для крепления аутригеров (15) установлены аутригеры (7), удерживающие подъемник в рабочем положении.
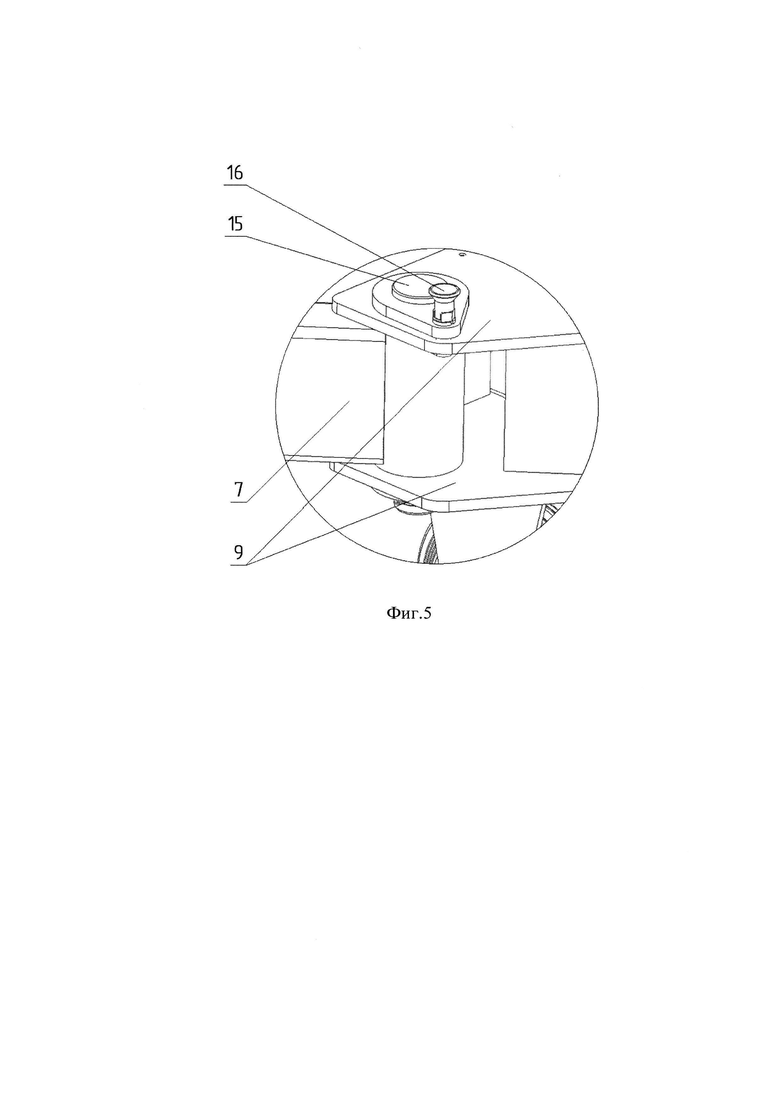
Каждый аутригер (7) содержит пружинный фиксатор (16) и домкрат (17).
Пружинный фиксатор (16) показан на фиг. 5, представляет собой подпружиненный с одной стороны закаленный штифт цилиндрической формы и предназначен для автоматической фиксации аутригера (7) в крайнем выдвинутом положении.
Пружинные фиксаторы (16) позволяют защитить оператора от несанкционированного складывания аутригеров (7) во время работы, которое может привести к потере устойчивости и опрокидыванию подъемника.
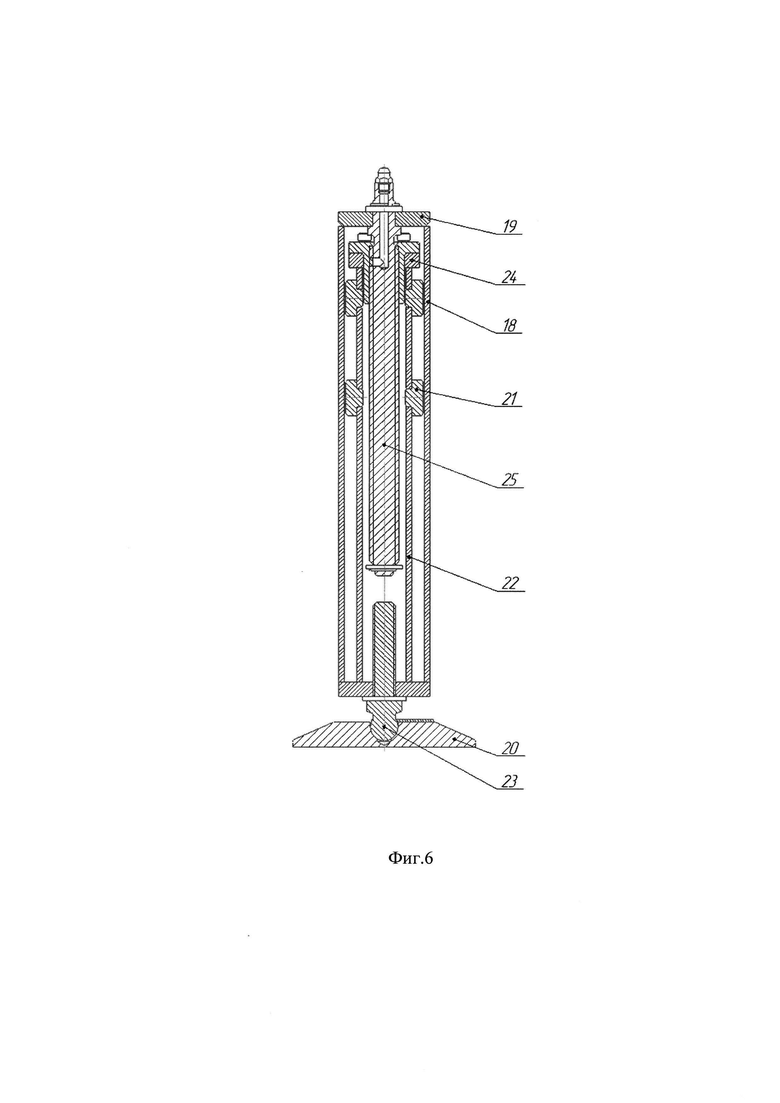
Домкрат, показанный в разрезе на фиг. 6, предназначен для установки изделия в горизонтальное положение даже на участках с явно выраженной неровностью поверхности и содержит гильзу (18) квадратного сечения с крышкой (19) и основанием (20). Как видно на фиг. 6, внутри гильзы (18) через антифрикционные втулки круглого сечения (21) установлен квадратный шток (22), соединенный с шаровой опорой (23). Внутри квадратного штока (22) через втулку (24) установлен винт (25). Крышка (19) домкрата (17) содержит сквозное отверстие для выхода винта (25) наружу.
Винт (25) может содержать канал для смазки и тавотник, что обеспечивает простой доступ смазки к винтовой паре, тем самым повышая технологичность обслуживания и надежность работы аутригера, которая в свою очередь снижает риск травматизма и иных несчастных случаев при работе подъемника вследствие неисправности узла опорного оборудования.
Использование в конструкции домкрата (17) гильзы (18) квадратного сечения, а также квадратного штока (22) (т.е. штока квадратного сечения) позволяет увеличить осевой момент сопротивления данного сечения, что увеличивает местную устойчивость рамы и подъемника в целом.
Перевод всех четырех аутригеров (7) в рабочее положение осуществляется посредством одной съемной ручки. Таким образом, аутригеры (7) в отличие от известных аналогов не имеют выступающих частей в виде ручек, а риск травматизма персонала о выступающие части подъемника снижается, за счет чего повышается безопасность его использования.
При этом, предпочтительно, чтобы рама (1) подъемника была выполнена из стали 09Г2С с толщиной стенок труб каркаса не менее 3 мм, толщиной накладок не менее 4 мм и толщиной усиливающего листа не менее 8 мм, что увеличивает устойчивость рамы при работе в расширенных диапазонах эксплуатационных показателей, поскольку сталь 09Г2С по сравнению с используемой в аналогах сталью менее подвержена к образованию трещин в сварных швах при резких перепадах температур (ниже 35 градусов).
Аналогично, предпочтительно, чтобы аутригеры и боковые раскосы подъемника были выполнены из стали 09Г2С.
Телескопический подъемник может содержать переворотный узел, предназначенный для осуществления погрузки и разгрузки подъемника в и из транспортного средства, который более подробно будет описан ниже.
Внутри полого каркаса (8) рамы (1) между труб квадратного сечения установлена телескопическая мачта (3), предназначенная для подъема рабочей платформы (4) с оборудованием или персоналом на заданную высоту.
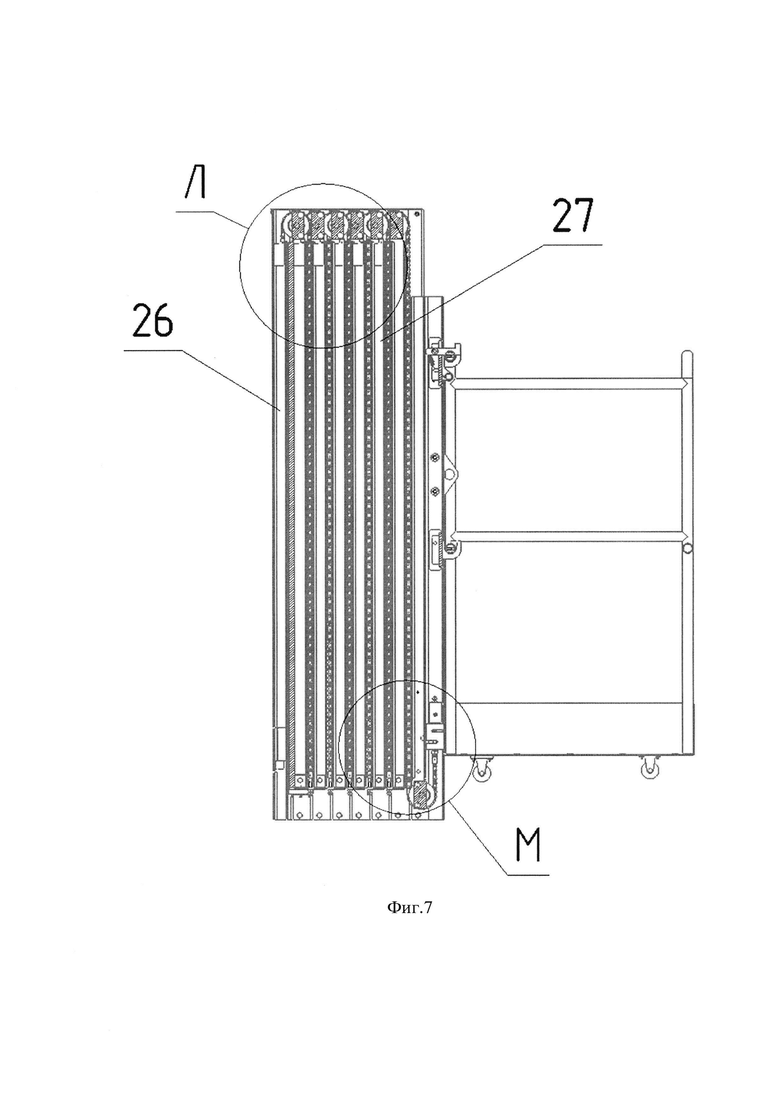
Телескопическая мачта (3) состоит из стационарной (неподвижной) части (26) и подвижной части (27), включающей подвижные секции (профили), соединенные между собой сверху и снизу скользунами с возможностью скольжения относительно друг друга. Движение телескопической мачты от привода осуществляется через блочно-цепную систему обратных полиспастов.
Более подробно конструкция телескопической мачты представлена на фигурах 7-10.
Телескопическая мачта (3) состоит из однотипных по конструктивному исполнению секций (в одну секцию входит один профиль). Телескопическая мачта (3) может комплектоваться различным количеством секций, в зависимости от необходимой высоты подъема оборудования.
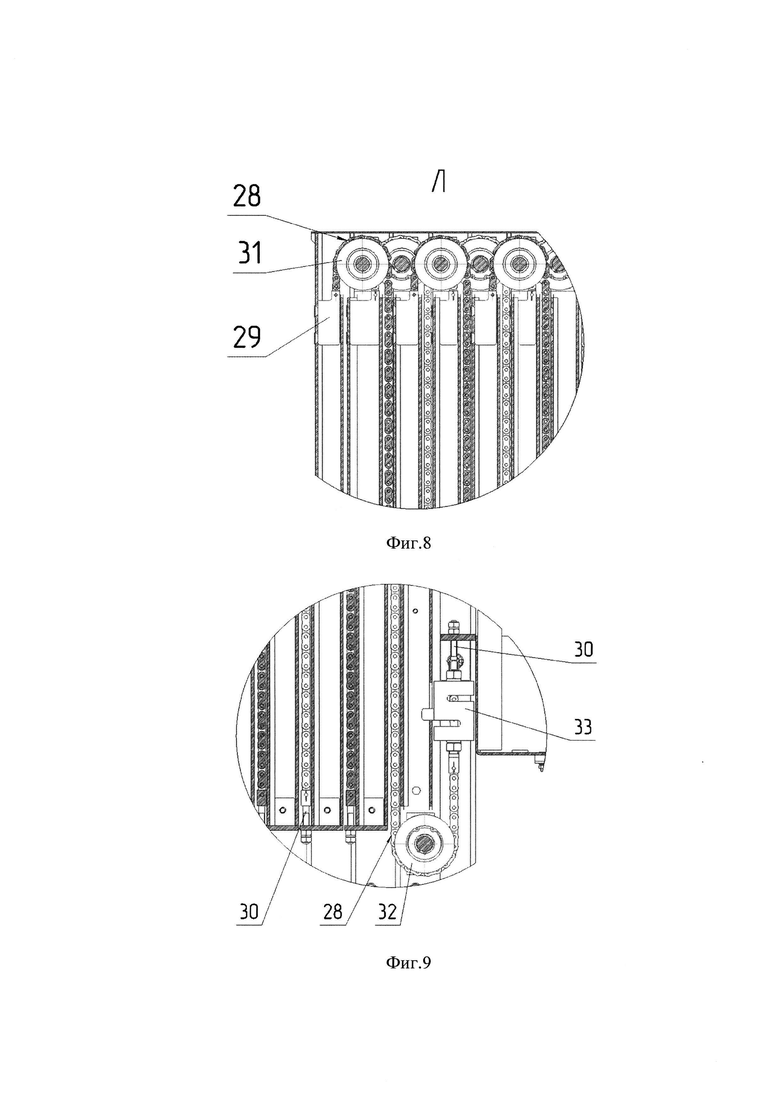
Каждая секция телескопической мачты соединена двумя параллельными ветвями цепей (28) с секцией, стоящей перед предыдущей секцией при помощи держателей (29), натяжителей (30) и верхних блоков (31) (например: третья секция соединена с первой; четвертая секция соединена со второй, и т.д.).
Держатели (29) закреплены непосредственно сверху каждой секции на боковой поверхности телескопической мачты (3), натяжители (30) закреплены на планках, установленных внизу каждой секции подвижной части телескопической мачты (27), а верхние блоки (31) установлены на осях сверху на торцевой поверхности каждой секции подвижной части телескопической мачты (27).
Таким образом, блочно-цепная система движения представляет собой две параллельные ветви цепи (27), выходящие из держателей (29), проходящие через верхние блоки (31) и заходящие в натяжители (30).
Отличительной особенностью заявленного изобретения является то, что внизу (ближе к раме (1)) на последней секции подвижной части телескопической мачты (27) расположен нижний блок (32), а цепь проходящая через него закреплена с натяжителем через датчик силы (33).
В качестве датчика силы (33) может быть использован любой известный из уровня техники тензометрический датчик.
Установка такого датчика на цепь дает возможность не устанавливать на рабочую платформу дополнительной «тяжелой» фальш-рамы с двумя датчиками, как на аналогичных рабочих платформах крановой техники, тем самым уменьшается масса рабочей платформы, что приводит к повышению устойчивости подъемника в целом.
В отличие от клапанов гидравлических систем, используемых в аналогичных подъемниках, срабатывающих при превышении нагрузки во время движения телескопической мачты вверх, датчик силы (33) предназначен также для блокировки движения телескопической мачты (3) с превышением грузоподъемности при движении вниз в случае если вверх рабочая платформа была поднята в пределах допустимого веса и догружена оборудованием/инструментом/строительным мусором и т.п.наверху. В случае превышения предельно-допустимого натяжения цепи (которое зависит от массы рабочей платформы) - датчик силы (33) передает данную информацию в контроллер, который в свою очередь заблокирует возможность движения телескопической мачты вверх/вниз (с подачей соответствующего звукового сигнала).
Таким образом, использование в конструкции подъемника датчика силы (33) позволяет контролировать нагружение телескопической мачты в рабочих пределах, исключая превышение рабочей нагрузки на изделие, как при движении телескопической мачты вверх, так и вниз, что повышает безопасность персонала.
Также отличием заявленного изобретения является расположение в пазу стационарной части (26) телескопической мачты (3) снизу (ближе к раме (1)) датчика контроля угла наклона телескопической мачты (34), предназначенного для определения безопасных углов использования телескопической мачты на различных высотах. В случае превышения допустимого угла наклона - датчик контроля угла наклона (34) передает данную информацию в контроллер, который в свою очередь заблокирует возможность подъема телескопической мачты вверх (с подачей соответствующего звукового сигнала).
В качестве датчика контроля угла наклона (34) может быть использован датчик наклона на основе твердотельного акселерометра.
Расположение датчика контроля угла наклона телескопической мачты (34) в пазу стационарной части телескопической мачты (26) обеспечивает гладкость и ровность поверхности телескопической мачты (3), на которую подъемник может укладываться во время транспортировки, в связи с чем он не будет служить помехой при выгрузке и погрузке основания в транспортное средство для перевозки, а также не нарушит устойчивость основания при транспортировке.
Использование в конструкции основания датчика контроля угла наклона (34) позволяет исключить вероятность превышения телескопической мачтой (3) допустимого угла наклона к вертикальному положению, вследствие которого основание может быть опрокинуто, за счет чего снижается риск травматизма и иных несчастных случаев персонала и достигается повышение безопасности.
Контроллер (на фиг. не показан) является устройством безопасности и предназначен для установки на подъемник в целях недопущения его разрушения и опрокидывания при спуске/подъеме груза, а также для управления световой сигнализацией в критических режимах работы подъемника.
Контроллер, ограничивающий предельную нагрузку на рабочую платформу и угол наклона мачты относительно горизонта, содержит дисплей и размещен в корпус с кабельными вводами для подачи на него питания и получения информации от датчиков силы (33) и угла наклона телескопической мачты (34).
Контроллер устанавливается на последнюю секцию телескопической мачты в непосредственной близости от оператора, находящегося в рабочей платформе.
Принцип действия контроллера основан на приеме и преобразовании аналогового сигнала с датчика силы (33) и датчика контроля угла наклона телескопической мачты (34) и сравнении полученной информации с предельно-допустимыми значениями для данного типа подъемника.
Для включения сигнальных устройств служит исполнительное электромеханическое реле с контактной группой типа «сухой контакт».
Алгоритм работы датчиков состоит в том, чтобы передавать информацию непосредственно в контроллер, после чего контроллер оценивает возможность подъема или спуска мачты в зависимости от высоты нахождения оператора.
В предпочтительном варианте изобретения телескопическая мачта (3) выполнена из алюминиевого сплава 6082Т66. Благодаря высоким показателям предела текучести данного сплава конструкция способна выдерживать нагрузки на изгиб значительно выше, чем конструкция, изготовленная из алюминия, что также повышает безопасность использования основания при выполнении различного вида работ.
На последней секции подвижной части телескопической мачты (27) расположена рабочая платформа (4), детально изображенная на фиг. 13.
Рабочая платформа (4) может быть установлена с возможностью оперативного (быстрого, не требующего дополнительных инструментов) снятия.
Рабочая платформа (4) состоит из сварного ограждения (35), выполненного из верхних и нижних труб, рифленого основания (36) и входной планки (37).
Входная планка (37) имеет возможность перемещаться вверх - увеличивая тем самым пространство для входа оператора на платформу.
На верхней и нижней трубе ограждения (35) жестко установлено по два ограничителя (38), которые предотвращают боковые смещения рабочей платформы (4) установленной на телескопической мачте (3).
Рабочая платформа (4) включает по меньшей мере один инструментальный лоток (39), предназначенный для расположения инструментов во время выполнения работ на высоте. Возможность размещения инструмента в специально отведенном месте на высоте минимизирует риск падения инструмента на пол, а тем самым повышает безопасность использования подъемника.
В предпочтительном варианте выполнения изобретения, на рабочей платформе (4) устанавливается два инструментальных лотка (39) с каждой стороны от телескопической мачты (4), что уравновешивает нагружение телескопической мачты, а также позволяет расположить инструменты в доступности со стороны правой и левой руки оператора, исключает необходимость перекладывания инструмента из руки в руку и повышает безопасность использования подъемника.
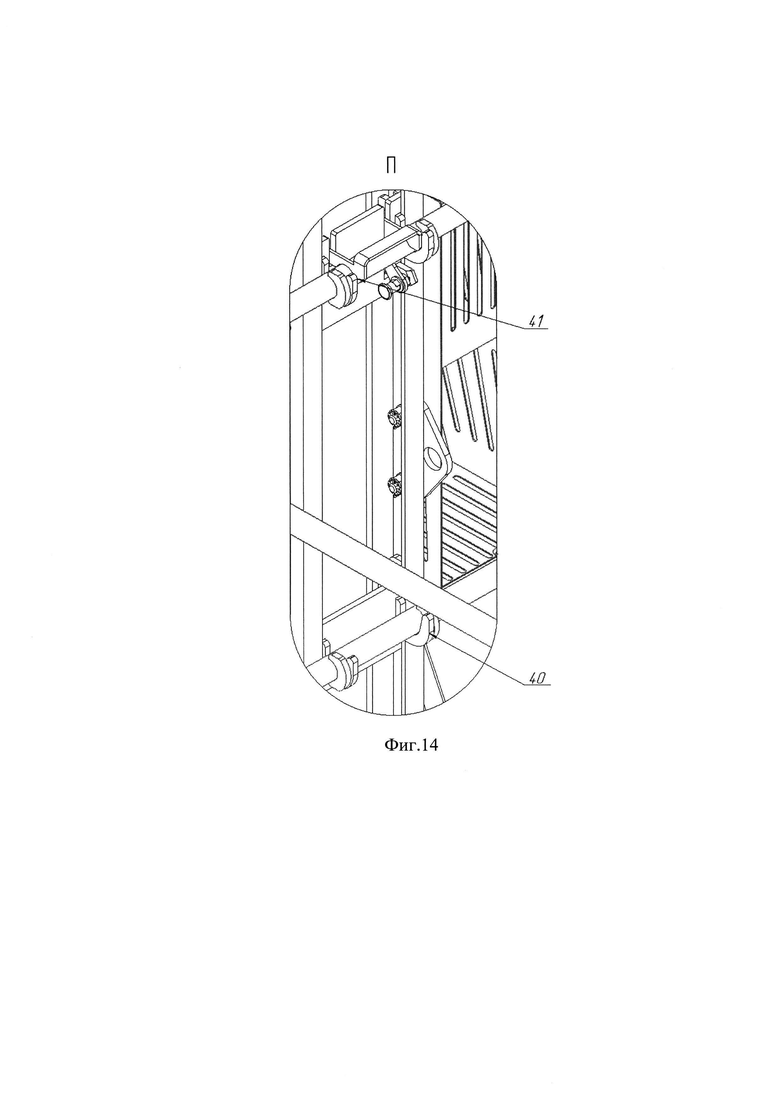
В случае установки рабочей платформы (4) с возможностью оперативного снятия, механизм закрепления рабочей платформы (4) на телескопической мачте (3) состоит из нижнего захвата (40) и верхнего захвата (41), которые иллюстрируются фиг. 14-16.
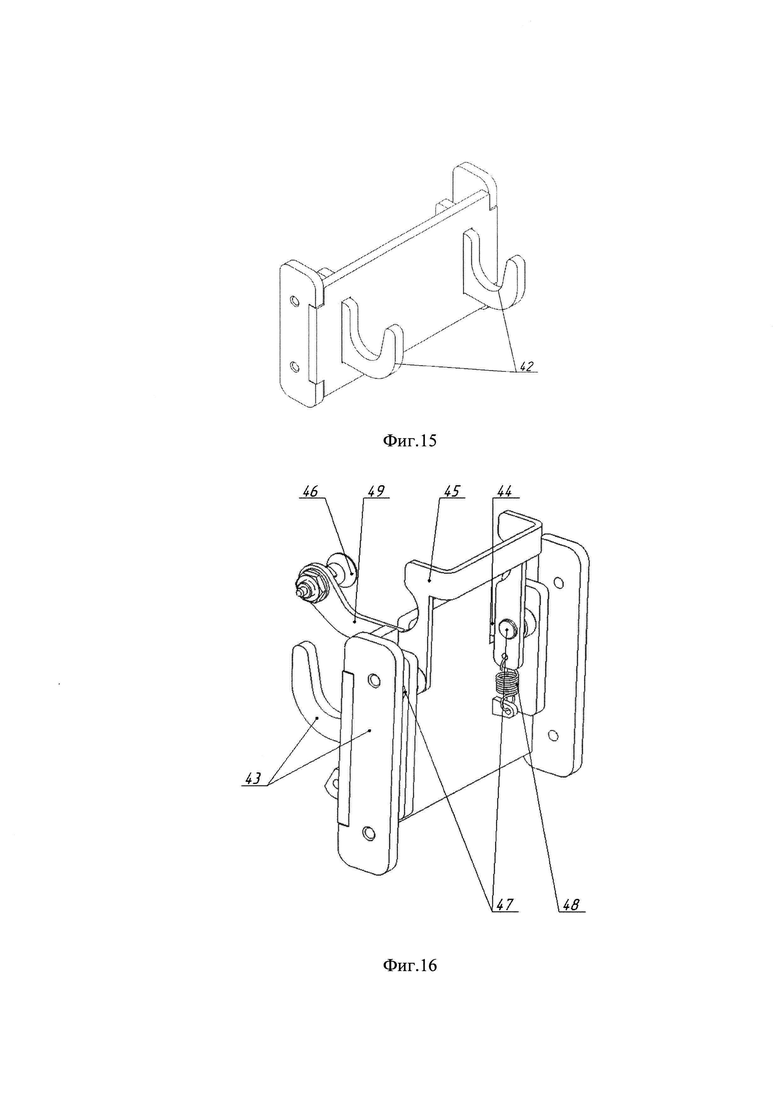
Нижний захват (40), изображенный на фиг. 15, представляет собой сварной нижний кронштейн (42) с крюками для фиксации одной из труб ограждения рабочей платформы (35).
Верхний захват (41), изображенный на фиг. 16, состоит из верхнего кронштейна (43) с крюками, в пазах (44) которого шарнирно посредством двух осей (47) установлена откидная скоба (45) с подпружиненным фиксатором (46).
Подпружиненный фиксатор (46) включает педаль (49), жестко связанную с откидной скобой (45) и пружину растяжения (48).
Боковые планки откидной скобы (45) содержат углубления для обхвата одной из труб ограждения рабочей платформы (35). Таким образом, при фиксации рабочей платформы (4) в верхнем захвате (41), труба ограждения (35) располагается в полости, образованной крюками верхнего кронштейна (43) и углублениями откидной скобы (45).
В момент монтажа рабочей платформы (4) на телескопическую мачту (3), оператор с помощником опускают платформу (4) на нижний и верхний захваты (40) и (41) соответственно, при этом откидная скоба (45) в этот момент времени находится в верхнем положении, а пружина растяжения (48) полностью сжата.
При опускании рабочей платформы (4), ее верхняя труба ограждения (35) опирается на педаль (49). По мере опускания, педаль (49) приводит в поворотное движение откидную скобу (45), относительно двух осей (47) - до того момента пока на пружинном фиксаторе (46) автоматически не сработает подпружиненный штифтовой механизм, который дополнительно фиксирует откидную скобу (45) относительно верхнего кронштейна (43) (в этот момент рабочая платформа (4) полностью зафиксирована на телескопической матче (3) подъемника).
Наличие нижнего (40) и верхнего (захватов), предназначенных для оперативного снятия рабочей платформы (4) позволяет уменьшить вес подъемника и снизить его центр тяжести для осуществления ручной погрузки в транспортное средство, что минимизирует риск травматизма и тем самым повышает безопасность использования подъемника, а также дополнительно упрощает и повышает скорость подготовительных операций.
Для демонтажа рабочей платформы (4) необходимо отвести рычаг пружинного фиксатора (46) и приподнять рабочую платформу (4) вверх - при этом пружина растяжения (48) будет «освобождать» рабочую платформу (4) от откидной скобы (45).
Рабочая платформа (4) выполнена из 09Г2С, преимущества которого были описаны выше.
На полом каркасе (8) рамы (1) расположены проушины (50) для крепления к основанию боковых раскосов (5). С другой стороны боковые раскосы (5) жестко закреплены к верхней точке стационарной части телескопической мачты (26) через кронштейн таким образом, чтобы боковые раскосы (5) были не параллельны друг другу и образовывали пространственный тетраэдр.
Выполнение боковых раскосов (5) непараллельными (сходящимися) обеспечивает большую жесткость подъемника при боковых порывах ветра. Крепление боковых раскосов (5) в самой верхней точке стационарной части телескопической мачты (26) «переносит» опасное сечение с нижней секции стационарной части телескопической мачты стационарного профиля от любых изгибающих моментов на более жесткую подвижную часть телескопической мачты (27). Данное конструктивное решение позволяет телескопической мачте (3) воспринимать серьезные ветровые нагрузки даже на высоте 10-12 метров от рамы (1) без отклонения от вертикальной оси, что снижает риск травматизма или иных несчастных случаев от возможности опрокидывания подъемника и повышает безопасность использования подъемника во время работы.
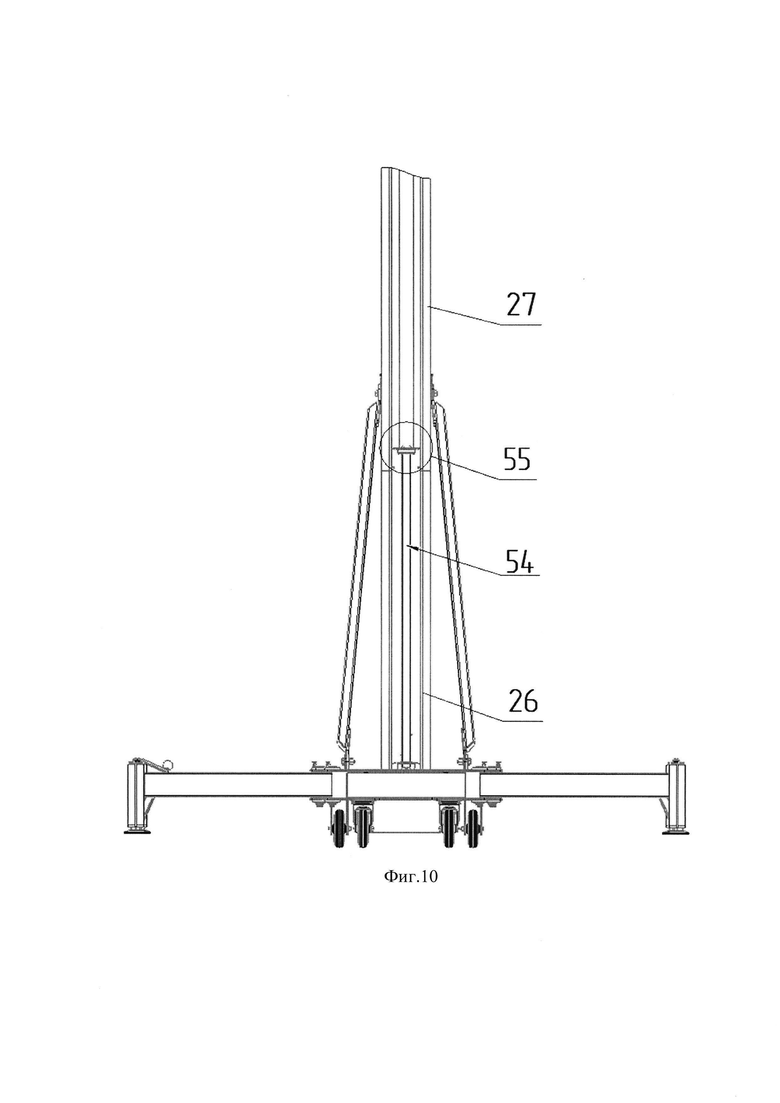
На раме (1) подъемника установлен привод выдвижения телескопической мачты (6), показанный на фиг. 4 и 10. Привод движения телескопической мачты (6) состоит из двигателя постоянного тока (51), червячного редуктора (52), упорного стакана с подшипником (53), ходового винта (54) и гайки (55), при этом двигатель постоянного тока (51) и червячный редуктор (52) закреплены к силовому листу (11) рамы (1) снизу, а упорный стакан (53) - сверху. За счет данных конструктивных решений центр масс рамы (1) смещается как можно ниже к земле, что повышает устойчивость подъемника. Одновременно с этим указанные конструктивные решения позволяют распределить всю нагрузку с ходового винта (54) на раму (1) равномерным образом, снимая все осевые нагрузки на двигатель и редуктор, что увеличивает их ресурс работы.
Применение данного привода (6) выдвижения телескопической мачты (3) вместо используемой в аналогах гидравлической системы позволяет не устанавливать дополнительно маслостанцию с насосным агрегатом. Также электрический привод имеет более высокие значения КПД, чем гидравлический.
При использовании маслостанции есть вероятность загрязнить атмосферу и персонал при штатном срабатывании предохранительного клапана или при нештатной поломке любых элементов гидросистемы (также это влечет за собой возможное несанкционированное опускание подъемника вниз).
В случае с электрическим винтовым приводом, несанкционированного опускания не происходит, так как даже при поломке электродвигателя или редуктора бронзовая гайка не будет скользить по винту (происходит самоторможение, за счет сил трения в паре винт-гайка).
В одном из предпочтительных вариантов выполнения изобретения заявленный телескопический подъемник должен быть оснащен переворотным узлом, предназначенным для перевода подъемника из рабочего положения в транспортное и наоборот, а также погрузки подъемника в различные грузовые транспортные средства посредством приложения силы на рычаг.
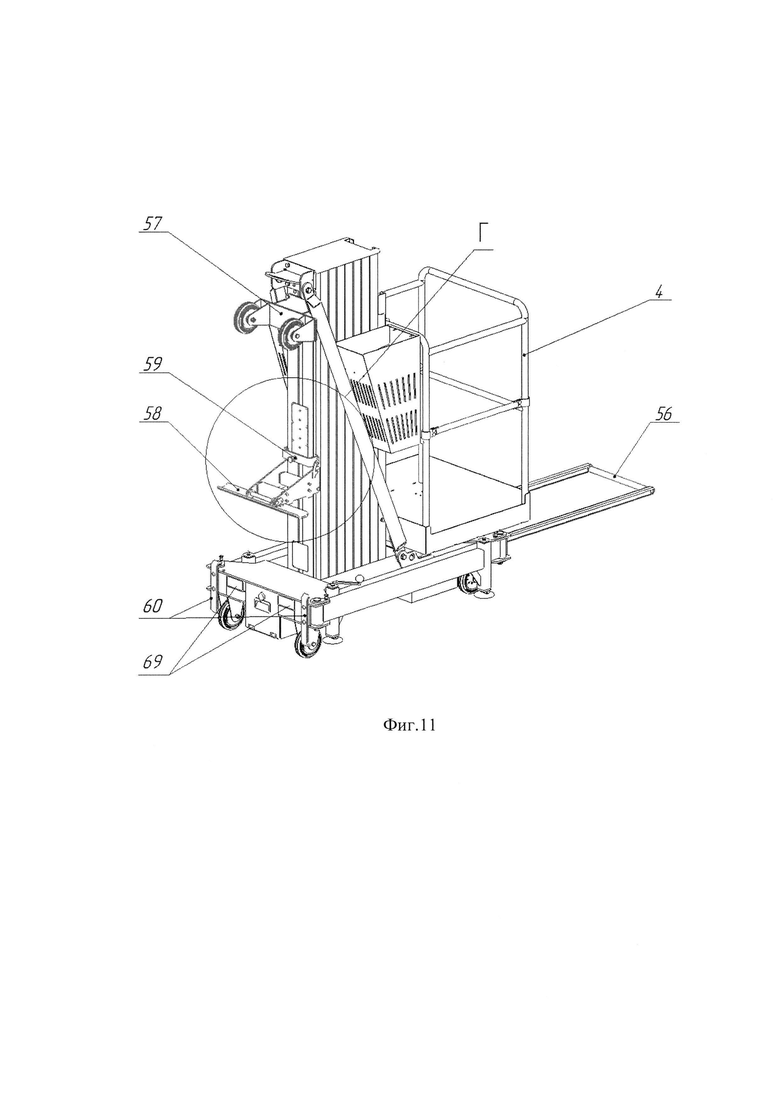
Переворотный узел показан на фиг. 11, 12 и состоит из переворотного рычага П-образной формы (56), блока колес (57), упорного блока (58), фиксатора (59) и лыж (60).
Переворотный рычаг П-образной формы (56)телескопически установлен в полый каркас (8) рамы (1) основания и выдвигается наружу только при необходимости переворота основания в транспортное средство.
Переворотный рычаг П-образной формы (56), состоит из двух профильных труб квадратного сечения, соединенных между собой круглой рукояткой, что обеспечивает приложение силы к двум точкам основания, снижает риск опрокидывания подъемника при погрузке в транспортное средство, т.е. исключает риск травматизма персонала и повышает безопасность работ при погрузке основания в транспортное средство. Кроме того, такая форма переворотного рычага дает возможность осуществить подъем одновременно двум работникам, что облегчает и упрощает операцию погрузки.
Выполнение переворотного рычага П-образной формы (56)телескопическим позволяет исключить риск травматизма персонала при выполнении работ о выступающие части подъемника.
Блок колес (57) предназначен для закатывания подъемника в грузовое транспортное средство после переворота в транспортное положение. Блок колес (57) жестко установлен в верхней части стационарной части телескопической мачты (26) и состоит из сварной рамы и двух колес, аналогичных колесной базе (2).
Лыжи (60) предназначены для скольжения рамы (1) по кузову транспортного средства при погрузке подъемника. Лыжи (60) жестко установлены на тыльной стороне рамы (1) вблизи передних колес колесной базы (4). Лыжи (60) представляют собой гнутый профиль с нанесенным на него антифрикционным покрытием.
Упорный блок (58) предназначен для обеспечения контакта подъемника и транспортного средства при загрузке и выгрузке подъемника из транспортного средства и имеет возможность вертикального перемещения вдоль стационарного части телескопической мачты (26). Однако снизу его движение ограничено рамой (1), а сверху - фиксатором (59).
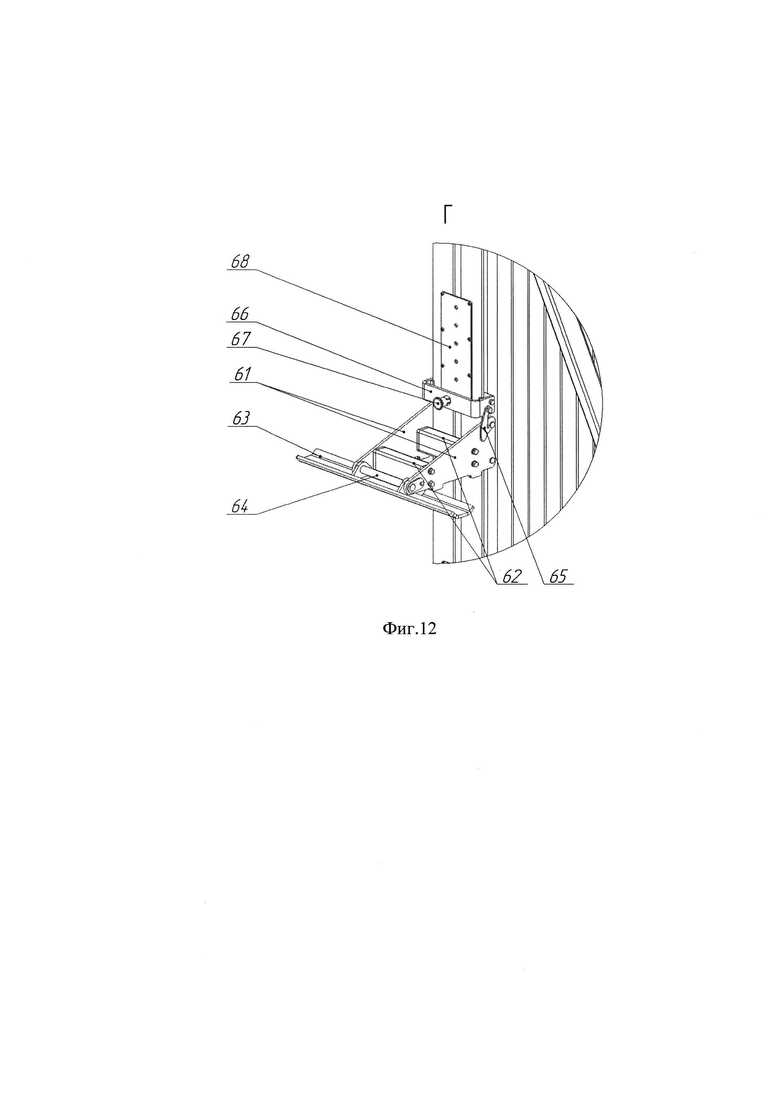
Упорный блок (58), более подробно представленный на фиг. 12, состоит из двух боковин (61), которые двигаются по стационарной части телескопической мачты (26) при помощи колес (не показаны), распорок (62), соединяющих боковины между собой, скребка (63), установленного в боковинах (61) при помощи оси скребка (64).
Таким образом, упорный блок (58) представляет собой конструкцию, которая с одной стороны жестко закреплена на стационарной части телескопической мачты (26) и в то же время имеющая подвижный относительно кузова грузовика элемент - скребок (63) на оси скребка (64), что обеспечивает контакт упорного блока (58) и кузова грузовика в одной точке как при погрузке, так и при разгрузке основания из транспортного средства, т.е. обеспечивает выгрузку основания без приложения персоналом дополнительной силы («рывком на себя»), чем минимизирует риск травматизма при выполнении подготовительных операций. Кроме того, данная конструкция упорного блока (58) исключает вероятность помехи скребком (63) при продвижении основания по полу кузова при загрузке, что также исключает необходимость персонала по приложению дополнительной силы («рывком от себя»), минимизирует риск травматизма, а дополнительно упрощает и ускоряет проведение подготовительных операций.
Упорный блок (58) соединен с фиксатором (59) при помощи откидного крючка (65).
Фиксатор (59) также как и упорный блок (58) имеет возможность вертикального перемещения вдоль стационарной части телескопической мачты (26). Фиксатор (59) предназначен для установки упорного блока (58) на требуемую высоту при погрузке (в зависимости от высоты транспортного средства) и для ограничения движения упорного блока (58) вверх по телескопической мачте (3).
Фиксатор (59) состоит из скобы (66) и подпружиненного штифта (67).
Скоба (66) установлена на стационарной части телескопической мачты (26) при помощи антифрикционных элементов и имеет возможность вертикального перемещения относительно нее.
Для фиксации упорного блока (58) и фиксатора (59) на требуемой высоте на стационарной части телескопической мачты (26) предусмотрена планка (68) со сквозными отверстиями.
При выставлении высоты погрузки оператор устанавливает подпружиненный штифт (67) в одно из отверстий жестко закрепленной к профилю планки (68) (в зависимости от конкретной высоты погрузки в транспортное средство).
Для облегчения подготовительных работ подъем подъемника может осуществляться вилочным погрузчиком. В целях зацепления подъемника с вилочным погрузчиком в полом каркасе (8) предусмотрены ответные отверстия для вил погрузчика (69), форма которых соответствует форме вил. Выполнение ответных отверстий для вил погрузчика (69) в раме (1) основания повышает безопасность использования подъемника во время подготовительных операций по сравнению с применяемой в аналогах схемой подъема вилами «под раму» подъемника.
Устройство работает следующим образом.
Подготовительные операции: погрузка заявленного подъемника в транспортное средство и выгрузка из него.
Процесс погрузки заявленного подъемника в кузов транспортного средства изображен на фиг. 17-19.
В целях осуществления транспортировки на объект подъемник устанавливается вблизи транспортного средства в зону погрузки, как изображено на фиг. 17.
При помощи подпружиненного штифта (67), упорный блок (58) выставляется немного выше высоты погрузки в транспортное средство.
Из полого корпуса (8) рамы (1) основания работник выдвигает переворотный рычаг (56)и путем приложения усилия на него наклоняет основание подъемного сооружения внутрь грузового пространства до соприкосновения скребка (63) с полом грузового пространства. В этот момент упорный блок (58) передвигается по стационарной части телескопической мачты (26) вверх до соприкосновения с фиксатором (59).
При помощи дальнейшего усилия на переворотный рычаг (56) основание подъемного сооружения наклоняется внутрь грузового пространства до соприкосновения блока колес (57) с полом грузового пространства. В данный момент откидной крючок (65) под собственным весом освобождает упорный блок (58) из зацепления с фиксатором (59). Переворотный рычаг (56)под собственным весом задвигается в полый каркас (8) рамы (1).
Далее оператор закатывает подъемник внутрь грузового пространства, толкая его вперед. В данный момент подъемник опирается только на блок колес (57) и на колеса упорного блока (58), при этом край лыж (60) упирается во внешний борт погрузочного пространства.
Далее оператор закатывает подъемник внутрь по лыжам (60) до соприкосновения передних колес колесной базы (2) с полом погрузочного пространства, для дальнейшего закатывания изделия внутрь транспортного средства и транспортировки.
Конструкция переворотного узла позволяет повысить безопасность и при этом упростить и ускорить погрузку заявленного подъемника в транспортное средство.
Когда подъемник доставлен на объект - осуществляется разгрузка подъемника из транспортного средства, которая проводится аналогичным образом в обратной последовательности.
При необходимости в процессе подготовительных работ может быть применен вилочный погрузчик. В таком случае вилы погрузчика устанавливаются в ответных отверстиях (69) полого каркаса (8) и подъем подъемника производится погрузчиком.
Когда подъемник выгружен из транспортного средства, он вручную при помощи колесной базы (2) перевозится по объекту на заданную точку выполнения работ.
Далее подъемник устанавливается в рабочее положение. Оператор раскрывает складные аутригеры (7) до срабатывания пружинного фиксатора (16) и фиксирует их домкратами (17), для чего использует одну съемную ручку.
Работа подъемника осуществляется от аккумуляторной батареи. Выдвижение телескопической мачты (3) осуществляется при включении привода (6). Ходовой винт (54) привода (6) приводит в поступательное движение бронзовую гайку (55) установленную внизу первой секции телескопической мачты (3), тем самым поднимая и опуская подвижную часть телескопической мачты (27), секции которой соединены меду собой блочно-цепной системой, относительно стационарной части (26).
При движении телескопической мачты (3) датчик силы (33) регистрирует нагружение рабочей платформы (4) и отправляет данную информацию в контроллер, который сравнивает полученную информацию с предельно-допустимыми значениями, хранящимися в его памяти. В случае если происходит превышение нагрузки на рабочую платформу (4) контроллер запрещает движение телескопической мачты (3) вверх и вниз соответственно (это сопровождается специальным звуковым сигналом).
При движении телескопической мачты (3) датчик контроля угла наклона (34) регистрирует значение двух углов наклона рамы к горизонту (по оси «X» и по оси «Y») и отправляет данную информацию в контроллер, который сравнивает полученную информацию с предельно-допустимыми значениями, хранящимися в его памяти. В случае если происходит превышение одного из углов контроллер запрещает движение телескопической мачты (3) только вверх (при этом в подобной ситуации происходит специальное звуковое сопровождение). В случае если оператор уже находится на высоте и контроллер начал регистрировать незначительные отклонения по углам наклона (например, при проседании грунта): происходит звуковое предупреждение оператора и после этого происходит автоматическое опускание телескопической мачты (3) подъемника - для обеспечения безопасности оператора. Дальнейший подъем телескопической мачты (3) возможен только при восстановлении углов наклона не более допустимых значений.
Перевод подъемника в транспортное положение осуществляется путем складывания аутригеров (7) и снятия рабочей платформы (4) с телескопической мачты (3).
Заявленное изобретение обеспечивает снижение риска травматизма и иных несчастных случаев при использовании телескопического подъемника, включая проведение подготовительных операций и транспортировку, за счет:
- повышения надежности работы подъемника путем увеличения устойчивости подъемника при выполнении работ в расширенных показателях, а именно снижения центра тяжести подъемника и рамы, увеличения опорного контура подъемника, увеличения жесткости телескопической мачты, увеличения осевого момента сопротивления сечения домкрата аутригера,
- повышения надежности работы узлов подъемника, таких как привод и домкраты аутригеров,
- исключения травмоопасных операций по подготовке оборудования к работе или транспортировке, а именно исключение переворота и падения подъемника при его погрузке в транспортное средство, исключение изменения точки касания подъемника с полом транспортного средства при загрузке и выгрузке подъемника, обеспечение равномерного движения подъемника при погрузке и выгрузке из транспортного средства (исключение приложения рывков «на себя» или «от себя»), обеспечение возможности снижения массы подъемника для осуществления погрузки и выгрузки,
- снижения количества выступающих деталей,
- обеспечение специально отведенных мест хранения инструмента и личных вещей оператора,
- автоматизации контроля безопасности в части автоматической фиксации аутригеров от непреднамеренного складывания при работе, контроля положения (угла наклона) телескопической мачты, контроля нагружения телескопической мачты, как при движении вверх, так и при движении вниз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Передвижная мачта освещения телескопического типа | 2022 |
|
RU2795671C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Агрегат подъемный для ремонта скважин АПРС-32/40 | 2019 |
|
RU2712990C1 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |

Изобретение относится к подъемно-транспортным механизмам, а именно к мобильным подъемникам с рабочими платформами. Телескопический подъемник содержит стальную раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, включающей две параллельные ветви цепи, выходящие из держателей, установленных сверху на боковой поверхности секций телескопической мачты, проходящие через верхние блоки, расположенные на осях сверху на торцевой поверхности секций подвижной части телескопической мачты, и приходящие в натяжители, установленные снизу через планки на секциях подвижной части телескопической мачты параллельными ветвями цепей с секцией, стоящей перед предыдущей секцией. На подвижной части телескопической мачты установлена рабочая платформа с ограждением, выполненным из верхних и нижних труб. На раме и телескопической мачте закреплены боковые стальные раскосы, привод выдвижения телескопической мачты, складные стальные аутригеры, шарнирно установленные на осях по углам рамы, и переворотный узел. Рама подъемника содержит полый каркас из труб квадратного сечения с накладками, расположенными сверху и снизу каркаса, соединенными между собой ребрами жесткости. Длина одной стороны рамы больше другой стороны рамы по меньшей мере на ширину аутригера, низ рамы усилен сплошным листом, снабжен по меньшей мере одним отсеком для хранения оборудования, инструмента или личных вещей оператора. В полом каркасе рамы предусмотрены ответные отверстия для вил погрузчика, форма которых соответствует форме вил погрузчика, каждый аутригер содержит пружинный фиксатор и домкрат, включающий гильзу квадратного сечения, внутри которой через антифрикционные втулки круглого сечения установлен квадратный шток с винтом, соединенный с шаровой опорой, установленной в основании, боковые раскосы подъемника не параллельны друг другу. Достигается повышение безопасности использования подъемника в расширенных эксплуатационных показателях. 4 н. и 14 з.п. ф-лы, 19 ил.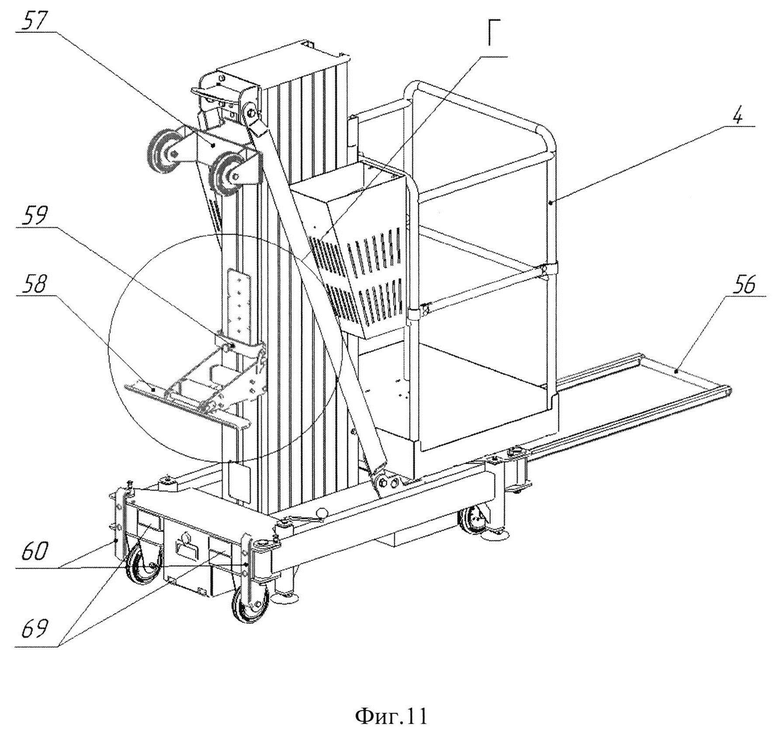
1. Телескопический подъемник, содержащий стальную раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, закрепленные на раме и телескопической мачте боковые стальные раскосы, привод выдвижения телескопической мачты и складные стальные аутригеры, шарнирно установленные на осях по углам рамы, отличающийся тем, что рама подъемника содержит полый каркас из труб квадратного сечения с накладками, расположенными сверху и снизу каркаса, соединенными между собой ребрами жесткости, причем длина одной стороны рамы больше другой стороны рамы по меньшей мере на ширину аутригера, низ рамы усилен сплошным листом, снабжен по меньшей мере одним отсеком для хранения оборудования, инструмента или личных вещей оператора, в полом каркасе рамы предусмотрены ответные отверстия для вил погрузчика, форма которых соответствует форме вил погрузчика, каждый аутригер содержит пружинный фиксатор и домкрат, включающий гильзу квадратного сечения, внутри которой через антифрикционные втулки круглого сечения установлен квадратный шток с винтом, соединенный с шаровой опорой, установленной в основании, боковые раскосы подъемника не параллельны друг другу, а крепление боковых раскосов к телескопической мачте выполнено в самой верхней точке стационарной части телескопической мачты через кронштейн.
2. Телескопический подъемник по п. 1, отличающийся тем, что рама содержит два отсека для хранения оборудования, инструмента или личных вещей оператора, один из которых предназначен для хранения аккумуляторной батареи.
3. Телескопический подъемник по п. 1, отличающийся тем, что рама подъемника выполнена из стали 09Г2С с толщиной стенок труб каркаса не менее 3 мм, толщиной накладок не менее 4 мм и толщиной усиливающего листа не менее 8 мм.
4. Телескопический подъемник по п. 1, отличающийся тем, что аутригеры и боковые раскосы выполнены из стали 09Г2С.
5. Телескопический подъемник по п. 1, отличающийся тем, что дополнительно содержит переворотный узел, который включает переворотный рычаг П-образной формы, телескопически расположенный в полом каркасе, блок колес, жестко закрепленный на стационарной части телескопической мачты, фиксатор, состоящий из скобы и подпружиненного штифта, закрепленного на стационарной части телескопической мачты, упорный блок, установленный на стационарной части телескопической мачты с возможностью перемещения вдоль нее, и лыжи, расположенные на тыльной стороне рамы, при этом упорный блок включает две боковины, распорки, соединяющие боковины между собой, откидной крючок и скребок, шарнирно установленный в боковинах при помощи оси скребка.
6. Телескопический подъемник по п. 1, отличающийся тем, что рабочая платформа установлена на телескопическую мачту с возможностью оперативного снятия посредством нижнего и верхнего захвата, при этом нижний захват представляет собой нижний кронштейн с крюками, а верхний захват состоит из верхнего кронштейна с крюками, в пазах которого шарнирно установлена откидная скоба с подпружиненным фиксатором и содержащая на боковых планках углубления под трубу ограждения рабочей платформы.
7. Телескопический подъемник по п. 1, отличающийся тем, что рабочая платформа содержит по меньшей мере один инструментальный отсек, съемно установленный на ней.
8. Телескопический подъемник по п. 7, отличающийся тем, что рабочая платформа содержит два инструментальных отсека, съемно установленных на ней.
9. Телескопический подъемник, содержащий стальную раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, включающей две параллельные ветви цепи, выходящие из держателей, установленных сверху на боковой поверхности секций телескопической мачты, проходящие через верхние блоки, расположенные на осях сверху на торцевой поверхности секций подвижной части телескопической мачты, и приходящие в натяжители, установленные снизу через планки на секциях подвижной части телескопической мачты таким образом, что каждая секция телескопической мачты соединена двумя параллельными ветвями цепей с секцией, стоящей перед предыдущей секцией, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, выполненным из верхних и нижних труб, закрепленные на раме и телескопической мачте боковые стальные раскосы, привод выдвижения телескопической мачты и складные стальные аутригеры, шарнирно установленные на осях по углам рамы, отличающийся тем, что привод движения телескопической мачты состоит из двигателя постоянного тока, червячного редуктора, упорного стакана с подшипником, ходового винта и гайки, при этом двигатель постоянного тока и червячный редуктор закреплены к сплошному листу рамы снизу, а упорный стакан - сверху, дополнительно подъемник содержит контроллер, ограничивающий предельную нагрузку на рабочую платформу и угол наклона мачты относительно горизонта, датчик силы и датчик угла наклона телескопической мачты, связанные с контроллером и расположенные на телескопической мачте, блочно-цепная система телескопической мачты дополнительно включает нижний блок, установленный на последней секции подвижной части телескопической мачты, при этом цепь, проходящая через него, закреплена с натяжителем через датчик силы, а датчик угла наклона установлен внизу стационарной части телескопической мачты в пазу.
10. Телескопический подъемник по п. 9, отличающийся тем, что телескопическая мачта выполнена из алюминиевого сплава 6082Т66.
11. Телескопический подъемник, содержащий раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, закрепленные на раме и телескопической мачте боковые раскосы, привод выдвижения телескопической мачты, складные аутригеры, шарнирно установленные на осях по углам рамы, и переворотный узел, отличающийся тем, что переворотный узел включает переворотный рычаг П-образной формы, телескопически расположенный в полом каркасе, блок колес, жестко закрепленный на стационарной части телескопической мачты, фиксатор, состоящий из скобы и подпружиненного штифта, закрепленного на стационарной части телескопической мачты, упорный блок, установленный на стационарной части телескопической мачты с возможностью перемещения вдоль нее, и лыжи, расположенные на тыльной стороне рамы, при этом упорный блок включает две боковины, распорки, соединяющие боковины между собой, откидной крючок и скребок, шарнирно установленный в боковинах при помощи оси скребка.
12. Телескопический подъемник, содержащий стальную раму на колесной базе, зафиксированную на раме телескопическую мачту, состоящую из стационарной и подвижной частей, включающих секции, соединенные между собой скользунами и блочно-цепной системой, включающей две параллельные ветви цепи, выходящие из держателей, установленных сверху на боковой поверхности секций телескопической мачты, проходящие через верхние блоки, расположенные на осях сверху на торцевой поверхности секций подвижной части телескопической мачты, и приходящие в натяжители, установленные снизу через планки на секциях подвижной части телескопической мачты таким образом, что каждая секция телескопической мачты соединена двумя параллельными ветвями цепей с секцией, стоящей перед предыдущей секцией, расположенную на подвижной части телескопической мачты рабочую платформу с ограждением, выполненным из верхних и нижних труб, закрепленные на раме и телескопической мачте боковые стальные раскосы, привод выдвижения телескопической мачты, складные стальные аутригеры, шарнирно установленные на осях по углам рамы, и переворотный узел, отличающийся тем, что рама подъемника содержит полый каркас из труб квадратного сечения с накладками, расположенными сверху и снизу каркаса, соединенными между собой ребрами жесткости, причем длина одной стороны рамы больше другой стороны рамы по меньшей мере на ширину аутригера, низ рамы усилен сплошным листом, снабжен по меньшей мере одним отсеком для хранения оборудования, инструмента или личных вещей оператора, в полом каркасе рамы предусмотрены ответные отверстия для вил погрузчика, форма которых соответствует форме вил погрузчика, каждый аутригер содержит пружинный фиксатор и домкрат, включающий гильзу квадратного сечения, внутри которой через антифрикционные втулки круглого сечения установлен квадратный шток с винтом, соединенный с шаровой опорой, установленной в основании, боковые раскосы подъемника не параллельны друг другу, а крепление боковых раскосов к телескопической мачте выполнено в самой верхней точке стационарной части телескопической мачты через кронштейн, привод движения телескопической мачты состоит из двигателя постоянного тока, червячного редуктора, упорного стакана с подшипником, ходового винта и гайки, при этом двигатель постоянного тока и червячный редуктор закреплены к сплошному листу рамы снизу, а упорный стакан - сверху, дополнительно подъемник содержит контроллер, ограничивающий предельную нагрузку на рабочую платформу и угол наклона мачты относительно горизонта, датчик силы и датчик угла наклона телескопической мачты, связанные с контроллером и расположенные на телескопической мачте, блочно-цепная система телескопической мачты дополнительно включает нижний блок, установленный на последней секции подвижной части телескопической мачты, при этом цепь, проходящая через него, закреплена с натяжителем через датчик силы, а датчик угла наклона установлен внизу стационарной части телескопической мачты в пазу, рабочая платформа установлена на телескопическую мачту с возможностью оперативного снятия посредством нижнего и верхнего захвата, при этом нижний захват представляет собой нижний кронштейн с крюками, а верхний захват состоит из верхнего кронштейна с крюками, в пазах которого шарнирно установлена откидная скоба с подпружиненным фиксатором и содержащая на боковых планках углубления под трубу ограждения рабочей платформы, переворотный узел включает переворотный рычаг П-образной формы, телескопически расположенный в полом каркасе, блок колес, жестко закрепленный на стационарной части телескопической мачты, фиксатор, состоящий из скобы и подпружиненного штифта, закрепленного на стационарной части телескопической мачты, упорный блок, установленный на стационарной части телескопической мачты с возможностью перемещения вдоль нее, и лыжи, расположенные на тыльной стороне рамы, при этом упорный блок включает две боковины, распорки, соединяющие боковины между собой, откидной крючок и скребок, шарнирно установленный в боковинах при помощи оси скребка.
13. Телескопический подъемник по п. 12, отличающийся тем, что рама содержит два отсека для хранения оборудования, инструмента или личных вещей оператора, один из которых предназначен для хранения аккумуляторной батареи.
14. Телескопический подъемник по п. 12, отличающийся тем, что рама подъемника выполнена из стали 09Г2С с толщиной стенок труб каркаса не менее 3 мм, толщиной накладок не менее 4 мм и толщиной усиливающего листа не менее 8 мм.
15. Телескопический подъемник по п. 12, отличающийся тем, что аутригеры и боковые раскосы подъемника выполнены из стали 09Г2С.
16. Телескопический подъемник по п. 12, отличающийся тем, что рабочая платформа содержит по меньшей мере один инструментальный съемный отсек.
17. Телескопический подъемник по п. 16, отличающийся тем, что рабочая платформа содержит два инструментальных отсека, съемно установленных на ней.
18. Телескопический подъемник по п. 12, отличающийся тем, что телескопическая мачта выполнена из алюминиевого сплава 6082Т66.
| CN 110065913 A, 30.07.2019 | |||
| US 2015034417 A1, 05.02.2015 | |||
| US 20090090526 A1, 09.04.2009 | |||
| Подъемник | 1989 |
|
SU1744061A1 |

