Изобретение относится к орошению сельскохозяйственных культур и предназначено для дождевальных машин кругового или фронтального действия.
Известен способ управления и контроля работы поливной установки и устройство для его осуществления (патент №2025953, МПК A01G 25/16, опубл. 09.01.1995), при котором задают требуемые значения времени включения и выключения поливной установки в циклах полива и регистрируют текущие значения этих параметров, отличающийся тем, что, с целью повышения качества управления поливом и достоверности контроля за проведением полива, в каждом цикле полива дополнительно производят сравнение заданных и текущих значений времени включения и времени выключения, а также времени ее работы и простоя в каждом цикле полива, а после завершения заданного количества циклов работы установки информацию о времени работы и простоя установки в каждом цикле используют для коррекции заданных значений времени включения и выключения установки в каждом следующем цикле, а также для оценки технического состояния установки для назначения регламентных работ и для оценки качества полива при расчете оплаты труда поливальщика.
Недостатком данного способа является отсутствие данных о назначении даты полива после предыдущего полива дождевальными машинами кругового или фронтального действия.
Наиболее близким по технической сущности к заявляемому изобретению является способ дифференцированного управления орошением посевов и устройство для его осуществления (патент №2650534, МПК A01G 25/16, опубл. 16.04.2018, бюл. №11), включающий в себя измерение влажности почвы и метеорологических показателей за период, предшествующий очередному поливу, построение математических моделей запасов почвенной влаги и определение поливных норм на основе математических моделей, отличающийся тем, что математическую модель динамики запаса почвенной влаги расширяют за счет включения в нее величины общей биомассы и сырой массы растений и дополняют моделью связи параметров биомассы растений с их оптическими показателями отражения, при этом параметры этих моделей оценивают предварительно, по данным дистанционного зондирования посевов и пробам, отбираемым с 10-12 тестовых площадок площадью 15-20 м2, расположенных рядом с основным полем, кроме того, разбивают весь интервал вегетации культуры на равные промежутки времени между поливами, площадь поля разбивают на элементарные участки площадью 5-10 м2, при этом предварительно, в начале каждого заданного интервала времени между поливами, посредством данных авиационного дистанционного зондирования и используемых математических моделей оценивают параметры биомассы и влагозапаса в почве на всех элементарных участках поля, по полученным оценкам для 20-25 элементарных участков посредством математической модели динамики биомассы и влагозапаса в почве определяют оптимальную среднюю норму полива и нормы поливов для отдельных элементарных участков, обеспечивающих достижение заданной относительной влажности биомассы посева в конце заданного интервала времени, для выбранных 20-25 элементарных участков определяют отклонения начальных значений параметров биомассы и влагозапаса в почве и норм полива от средних значений по данным участкам, и на основании этих отклонений оценивают параметры линейной модели корректирующего регулятора норм полива, используемого для всех элементарных участков поля, в реальном времени на всех элементарных участках поля, попадающих в зону технологического захвата дождевальной машины, определяют в начале интервала времени между поливами отклонения параметров биомассы и влагозапаса почвы от средних значений, по этим отклонениям посредством корректирующего регулятора норм полива вырабатывают поправки к средней норме полива и откорректированные нормы полива принимают в качестве заданий локальным регуляторам норм полива устройства для орошения, посредством которых включают и отключают оросительные форсунки с одновременным перемещением устройства для орошения на каждую очередную линию элементарных участков, попадающих в зону технологического захвата дождевальной машины, где операции способа для реального времени повторяют, а по истечении текущего интервала времени между поливами повторяют все операции способа для очередного полива.
Недостатком данного изобретения является отсутствие данных о назначении даты полива, а также сложность способа измерения влагозапасов с применением дорогостоящего летательного аппарата.
Технической задачей заявляемого изобретения является упрощение управления поливом дождевальными машинами кругового или фронтального действия и определение за 12-24 часа даты следующего полива с одновременным оповещением о дате полива всех участников полива.
Технический результат заключается в упрощении способа полива дождевальными машинами кругового или фронтального действия и прогнозировании и одновременном оповещении за 12-24 часа начала следующего полива.
Техническая задача решается в роботизированном способе управления поливом дождевальными машинами кругового или фронтального действия, включающим в себя измерение влажности почвы за период, предшествующий очередному поливу, построение математических моделей запасов почвенной влаги и динамики запаса почвенной влаги, при этом влажность почвы измеряется автономными датчиками, расположенными на верхних и нижних отметках микрорельефа площади, охватываемой дождевальной машиной кругового или фронтального действия, и снабженными передатчиками радиосигнала с радиусом действия до 30 км, установленными в почву на глубину 10-60 см, а высота стоек датчиков должна превышать высоту стебля сельскохозяйственной культуры на 0,5-1,0 м, при этом датчики откалиброваны в единицах объемной влажности и отправляют по радиоканалу данные о влажности почвы каждый час на глубинах, кратных 10 см, на устройство передачи данных, согласно присвоенному номеру каждого датчика, по спутниковой связи ГЛОНАСС на серверный компьютер, который, обрабатывая данные с датчиков, определяет приоритетный датчик и прогнозирует за 12-24 часа дату следующего полива, оповещает владельца водоема и насосной станции, оператора насосной станции, владельца дождевальной машины, оператора дождевальной машины о поливе через 12-24 часа.
Отличием от прототипа является то, что в роботизированном способе управления поливом дождевальными машинами кругового или фронтального действия вместо тестовых площадок площадью 15-20 м" используются от 5 до 10 шт. штыревых датчиков влажности с автономной системой электроснабжения на солнечной батарее, устанавливаемых в почву на глубину до 60 см, а высота стоек датчиков должна превышать высоту стебля сельскохозяйственной культуры на 0,5-1,0 м. В устройство датчика влажности почвы входит передатчик радиосигнала с радиусом действия до 30 км; Данные с датчиков влажности почвы на глубинах 10, 20, 30, 40, 50 и 60 см каждый час передаются в единицах объемной влажности (%НВ) по спутниковой связи ГЛОНАСС на серверный компьютер, согласно номеру, присвоенному каждому датчику.
На основе математической модели рельефных мест установки датчиков и динамики изменения влажности почвы определяется приоритетный датчик, а по данным приоритетного датчика прогнозируется следующий полив. В диапазоне прогноза от 24 до 12 часов данные о дате полива сообщаются всем участникам полива.
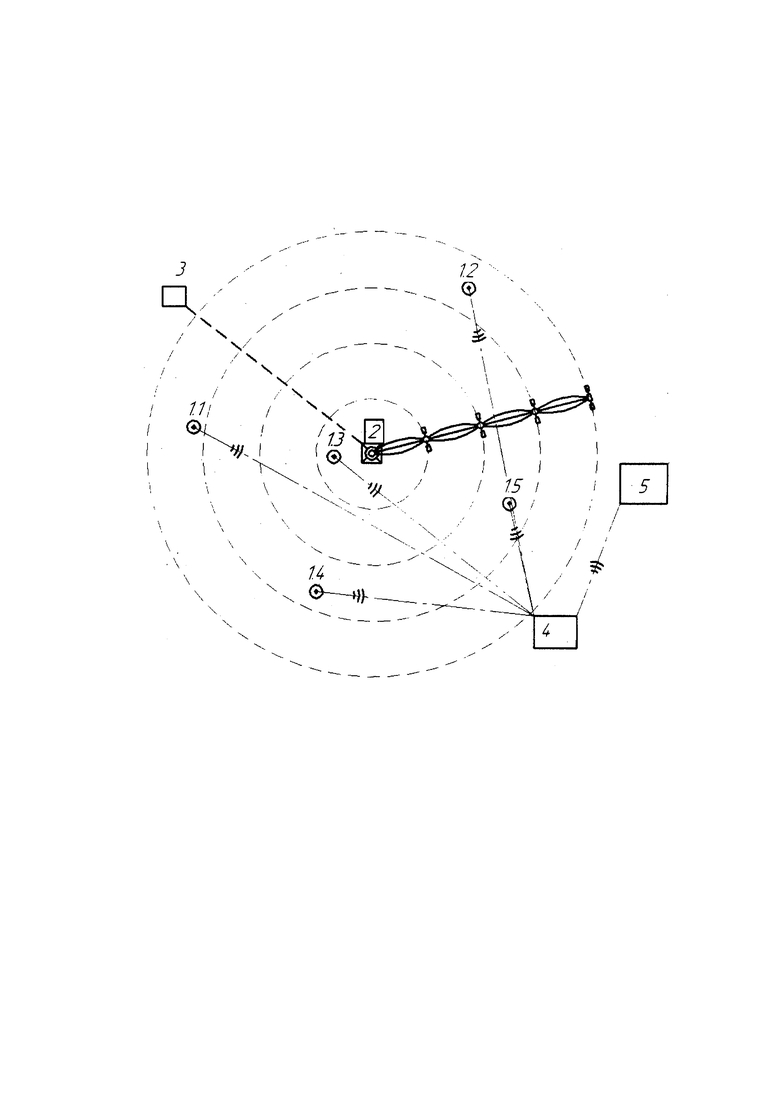
Роботизированный способ управления поливом дождевальными машинами кругового или фронтального действия представлен на фигуре и включает в себя: датчики влажности 1.1-1.5, щит управления дождевальной машиной 2, насосную станцию 3, устройство передачи спутниковой связи ГЛОНАСС 4, серверный компьютер 5.
Роботизированный способ управления поливом дождевальными машинами кругового или фронтального действия работает следующим образом. При измерении влажности почвы датчиками влажности 1.1-1.5 каждый час на глубинах 10-60 см данные по радиоканалу передаются на устройство 4 спутниковой связи ГЛОНАСС, с помощью которого эти данные передаются на серверный компьютер 5. На удаленном серверном компьютере 5 данные о влажности обрабатываются согласно математическим моделям, определяется приоритетный датчик и прогнозируется дата полива за 12-24 часа с одновременным оповещением о назначении даты и времени полива всех участников полива (владельца водоема и насосной станции 3, оператора насосной станции 3, хозяина и оператора дождевальной машины, при этом полученные данные направляются в щит управления 2 дождевальной машины. Затем, после назначенного роботизированным способом полива, цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
| УСТРОЙСТВО ДЛЯ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ С ОДНОВРЕМЕННЫМ ВНЕСЕНИЕМ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2019 |
|
RU2726542C1 |
| Дождевальная машина для прецизионного орошения | 2023 |
|
RU2814260C1 |
| Роботизированный оросительный комплекс | 2020 |
|
RU2743588C1 |
| Устройство управления группой дождевальных машин автоматизированной оросительной системы | 1980 |
|
SU884632A1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| Способ полива дождеванием | 1987 |
|
SU1556591A1 |
| Способ и система управления дифференциальным поливом сельскохозяйственных культур | 2020 |
|
RU2744069C1 |
| Многосекционная дождевальная машина кругового действия с интеллектуальным модулем | 2020 |
|
RU2755688C2 |
| Способ возделывания кукурузы на зерно | 1987 |
|
SU1554818A1 |
Изобретение относится к области сельского хозяйства. Способ состоит в измерении влажности почвы за период, предшествующий очередному поливу, построении математических моделей запасов почвенной влаги и динамики запаса почвенной влаги. Влажность почвы измеряется автономными датчиками, расположенными на верхних и нижних отметках микрорельефа площади, охватываемой дождевальной машиной кругового или фронтального действия, и снабженными передатчиками радиосигнала с радиусом действия до 30 км, установленными в почву на глубину 10-60 см. Высота стоек датчиков превышает высоту стебля сельскохозяйственной культуры на 0,5-1,0 м. Датчики откалиброваны в единицах объемной влажности и отправляют по радиоканалу данные о влажности почвы каждый час на глубинах, кратных 10 см, на устройство передачи данных, согласно присвоенному номеру каждого датчика, по спутниковой связи ГЛОНАСС на серверный компьютер, который, обрабатывая данные с датчиков, определяет приоритетный датчик и прогнозирует за 12-24 часа дату следующего полива, оповещает владельца водоема и насосной станции, оператора насосной станции, владельца дождевальной машины, оператора дождевальной машины о поливе через 12-24 часа. Обеспечивается упрощение способа полива дождевальными машинами кругового или фронтального действия, прогнозирование и одновременное оповещение за 12-24 часа начала следующего полива. 1 ил.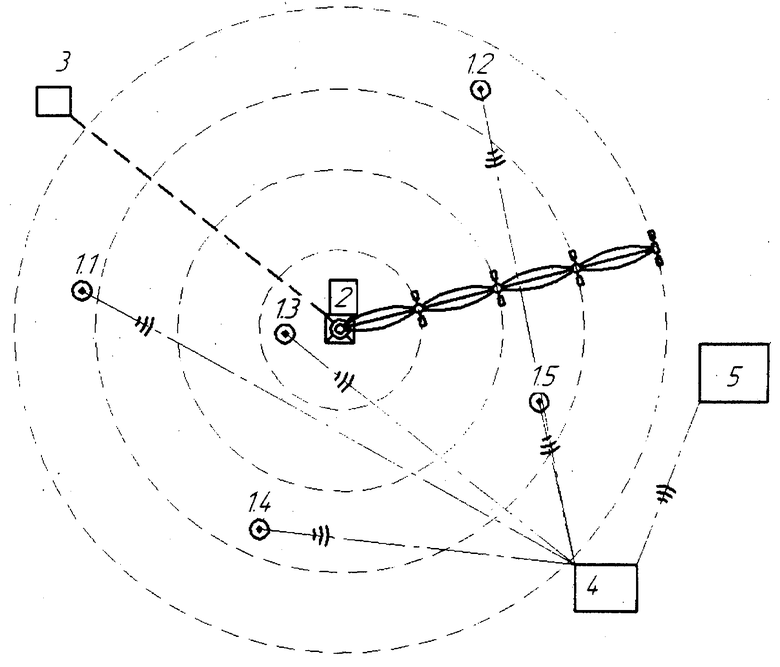
Роботизированный способ управления поливом дождевальными машинами кругового или фронтального действия, включающий в себя измерение влажности почвы за период, предшествующий очередному поливу, построение математических моделей запасов почвенной влаги и динамики запаса почвенной влаги, отличающийся тем, что влажность почвы измеряется автономными датчиками, расположенными на верхних и нижних отметках микрорельефа площади, охватываемой дождевальной машиной кругового или фронтального действия, и снабженными передатчиками радиосигнала с радиусом действия до 30 км, установленными в почву на глубину 10-60 см, а высота стоек датчиков должна превышать высоту стебля сельскохозяйственной культуры на 0,5-1,0 м, при этом датчики откалиброваны в единицах объемной влажности и отправляют по радиоканалу данные о влажности почвы каждый час на глубинах, кратных 10 см, на устройство передачи данных, согласно присвоенному номеру каждого датчика, по спутниковой связи ГЛОНАСС на серверный компьютер, который, обрабатывая данные с датчиков, определяет приоритетный датчик и прогнозирует за 12-24 часа дату следующего полива, оповещает владельца водоема и насосной станции, оператора насосной станции, владельца дождевальной машины, оператора дождевальной машины о поливе через 12-24 часа.
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
| Роботизированный оросительный комплекс | 2020 |
|
RU2743588C1 |
| Многосекционная дождевальная машина кругового действия с интеллектуальным модулем | 2020 |
|
RU2755996C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДОЖДЕВАНИЕМ | 2014 |
|
RU2644068C2 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |

