УРОВЕНЬ ТЕХНИКИ
Ультразвуковой неразрушающий контроль (УНК) является широко используемой технологией, применяемой для оценки количественных свойств неизвестных поверхностей, таких как толщина, форма и текстура. В ультразвуковых эхо-импульсных методах обратно рассеянные от поверхности эхо-сигналы содержат существенную информацию, относящуюся к свойствам отражателя. Таким образом, необходимо правильно извлечь эту информацию (например, с точки зрения амплитуды, времени прибытия и несущей частоты). Параметры времени прибытия, амплитуды и несущей частоты нашли широкое применение в ультразвуковых приложениях. Например, способ, при котором обратно рассеянные эхо-сигналы моделируются как наложенные гауссовы эхо-сигналы на фоне шума, известен в данной области техники. Кроме того, были разработаны алгоритмы оценки ультразвуковых сигналов на основе максимизации ожидания (EM). Алгоритмы на основе максимизации ожидания используют способ Гаусса-Ньютона или способ Левенберга-Маркварта для проведения оптимизации поиска, который зависит от ошибки прибытия в локальном минимуме.
Для повышения успешности этих методов соответствующее начальное приближение должно быть сделано для параметров искомого эхо-сигнала. Во многих случаях эхо-сигнал характеризуется скрытием в шуме или зашумленном фоне, что затрудняет формирование начального приближения. В связи с этим были выполнены различные исследования, основанные на понижении зашумленности сигнала с целью облегчения получения характеристик эхо-сигнала. Значительная часть этих предложений использует статистические способы первого порядка, такие как усреднение (например, наложение), чтобы произвести оценку зашумленного фона, засоряющего сигнал. Статистические способы первого порядка хорошо работают при оценке фона, когда величина отклонения времени прибытия эхо-сигнала в выборке достаточно велика (так что прибытия эхо-сигналов в выборке не совпадают). Однако статистические способы имеют ограничения, если прибытия эхо-сигналов не соответствуют известному распределению, соответствующему статистическим способам первого порядка и даже более сложным статистическим способам, и недостаточны для решения проблемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Здесь описаны системы, способы и устройства для автоматического получения характеристик одного или более эхо-сигналов, содержащихся в ультразвуковом сигнале. Ультразвуковой сигнал может быть сгенерирован с помощью ультразвукового преобразователя и отражен от формации перед тем, как будет записан ультразвуковым преобразователем. Необязательно, системы, способы и устройства могут работать в отдельной ультразвуковой дорожке, чтобы автоматически определить и пропустить эхо-сигнал, включенный в зашумленный ультразвуковой сигнал. Согласно описанному здесь варианту воплощения можно сделать более точные начальные приближения одного или более параметров эхо-сигнала, что повышает производительность и надежность алгоритма инверсии (например, алгоритма максимизации пространства переменного обобщенного математического ожидания (SAGE), используемого для оптимизации параметров эхо-сигнала. Параметры эхо-сигнала, полученные способом инверсии, могут быть использованы для создания изображения, например изображения формации, от которой отразился ультразвуковой сигнал.
Типовой способ автоматического получения характеристик эхо-сигнала, содержащегося в ультразвуковом сигнале, генерируемом с помощью ультразвукового преобразователя, может включать получение данных, соответствующих ультразвуковому сигналу, с помощью ультразвукового преобразователя, вычисление отношения энергий ультразвукового сигнала и локализированного эхо-сигнала, содержащегося в ультразвуковом сигнале, с использованием отношения энергий. Способ также может включать кадрирование части ультразвукового сигнала вокруг локализованного эхо-сигнала и вычисление быстрого преобразования Фурье (БПФ) и огибающей Гильберта для кадрированной части ультразвукового сигнала. Кроме того, способ может включать оценку M векторов параметров эхо-сигналов из БПФ и огибающей Гильберта для кадрированной части ультразвукового сигнала, вычисление M параметрических моделей эхо-сигналов на основе каждого из М векторов параметров эхо-сигналов и итерационную минимизацию разности между кадрированной частью ультразвукового сигнала и суммой М параметрических моделей эхо-сигнала. Каждый из М векторов параметров может включать множество параметров эхо-сигнала.
Необязательно, отношение энергий ультразвукового сигнала может быть вычислено, а эхо-сигнал, содержащийся в ультразвуковом сигнале, может быть локализован с использованием отношения энергий путем вычисления функции отношения энергий ультразвукового сигнала, где функцией отношения энергий является  , и определения максимального значения функции отношения энергий ультразвукового сигнала. Максимальное значение может соответствовать приблизительному местоположению эхо-сигнала, содержащегося в ультразвуковом сигнале. В функции отношения энергий, приведенной выше, Ex является энергией в определенной точке данных, a1 и a2 являются поправочными коэффициентами энергии, L является длиной кадра,
, и определения максимального значения функции отношения энергий ультразвукового сигнала. Максимальное значение может соответствовать приблизительному местоположению эхо-сигнала, содержащегося в ультразвуковом сигнале. В функции отношения энергий, приведенной выше, Ex является энергией в определенной точке данных, a1 и a2 являются поправочными коэффициентами энергии, L является длиной кадра,  является энергией сигнала,
является энергией сигнала,  является энергией шумов, и
является энергией шумов, и  является полной энергией.
является полной энергией.
Альтернативно или дополнительно функция отношения энергий ультразвукового сигнала может быть вычислена путем реверсирования данных, соответствующих ультразвуковому сигналу от связи по системе «голова-к-хвосту» до связи по системе «хвост-к-голове», вычисления функции отношения энергий реверсированного ультразвукового сигнала и определения максимального значения функции отношения энергий реверсированного ультразвукового сигнала. Максимальное значение функции отношения энергий ультразвукового сигнала может соответствовать левой части первого эхо-сигнала, содержащегося в ультразвуковом сигнале, а максимальное значение функции отношения энергий реверсированного ультразвукового сигнала может соответствовать правой части первого эхо-сигнала, содержащегося в ультразвуковом сигнале.
Альтернативно или дополнительно функция отношения энергий ультразвукового сигнала может быть вычислена путем обрезки данных, соответствующих ультразвуковому сигналу, вычисления функции отношения энергий обрезанного ультразвукового сигнала и определения максимального значения функции отношения энергий обрезанного ультразвукового сигнала. Максимальное значение функции отношения энергий ультразвукового сигнала может соответствовать левой части первого эхо-сигнала, содержащегося в ультразвуковом сигнале, а максимальное значение функции отношения энергий обрезанного ультразвукового сигнала может соответствовать левой части второго эхо-сигнала, содержащегося в ультразвуковом сигнале.
Необязательно, длина кадра (L) может быть приблизительно равна  , где s является настроечным коэффициентом, fc является несущей частотой ультразвукового сигнала, а fs является частотой дискретизации.
, где s является настроечным коэффициентом, fc является несущей частотой ультразвукового сигнала, а fs является частотой дискретизации.
Альтернативно или дополнительно часть ультразвукового сигнала вокруг локализованного эхо-сигнала может, необязательно, кадрироваться путем применения коэффициента полусглаживания к данным, соответствующим одной или более частей ультразвукового сигнала за пределами кадрированной части ультразвукового сигнала.
Необязательно, разница между кадрированной частью ультразвукового сигнала и суммой М параметрических моделей эхо-сигнала может быть итерационно минимизирована при выполнении по меньшей мере одного из: оптимизации Гаусса-Ньютона (ГН), генетического алгоритма (ГА) и эволюционной оптимизации метаэвристического подхода.
Альтернативно или дополнительно М параметрических моделей эхо-сигнала могут быть вычислены путем вычисления М параметрических моделей эхо-сигнала на основе каждого из М векторов параметров эхо-сигнала и кадрированной части ультразвукового сигнала. Кроме того, разница между кадрированной частью ультразвукового сигнала и суммой M параметрических моделей эхо-сигнала может быть итерационно минимизирована путем определения множества параметров эхо-сигнала для каждого из М векторов параметров эхо-сигнала на основе каждой из М параметрических моделей эхо-сигнала, обновления М векторов параметров эхо-сигнала, определения, сходятся ли обновленные М векторов параметров эхо-сигнала с М векторами параметров эхо-сигнала, и, если сходимость не достигнута, вычисления M параметрических моделей эхо-сигнала на основе каждого из обновленных М векторов параметров эхо-сигнала и кадрированной части ультразвукового сигнала. Способ итерационного минимизирования разности между кадрированной частью ультразвукового сигнала и суммой М параметрических моделей эхо-сигнала может повторяться до тех пор, пока не будет достигнута сходимость.
Кроме того, способ может, необязательно, дополнительно включать фильтрацию данных, соответствующих ультразвуковому сигналу, чтобы удалить по меньшей мере один фоновый компонент ультразвукового сигнала.
Альтернативно или дополнительно множество параметров эхо-сигналов может включать по меньшей мере одно из: коэффициент расширения полосы частот (α), время прибытия (τ), несущую частоты (fc), фазу (φ) и амплитуду (β). Необязательно, способ может дополнительно включать создание изображения с использованием множества параметров эхо-сигнала.
Типовая система для автоматического получения характеристик эхо-сигнала, содержащегося в ультразвуковом сигнале, может включать ультразвуковой преобразователь, выполненный с возможностью генерирования и приема ультразвукового сигнала, и блок управления, содержащий по меньшей мере один процессор и память. Ультразвуковой преобразователь может быть, необязательно, расположен в скважине. Блок управления может быть выполнен с возможностью получения данных, соответствующих ультразвуковому сигналу от ультразвукового преобразователя, вычисления отношения энергий ультразвукового сигнала и локализованного эхо-сигнала, содержащегося в ультразвуковом сигнале, с использованием отношения энергий. Блок управления может дополнительно быть выполнен с возможностью кадрирования части ультразвукового сигнала вокруг локализованного эхо-сигнала и вычисления БПФ и огибающей Гильберта для кадрированной части ультразвукового сигнала. Кроме того, блок управления может быть дополнительно выполнен с возможностью оценки М параметров эхо-сигнала из БПФ и огибающей Гильберта для кадрированной части ультразвукового сигнала, вычисления М параметрических моделей эхо-сигнала на основе каждого из М векторов параметров эхо-сигнала и итерационного минимизирования разницы между кадрированной частью ультразвукового сигнала и суммой М параметрических моделей эхо-сигнала. Каждый из М векторов параметров может включать множество параметров эхо-сигнала.
Следует понимать, что вышеописанный предмет обсуждения может также быть реализован как аппаратура, управляемая компьютером, вычислительная система или изделие промышленного производства, например, машиночитаемый носитель данных.
Другие системы, способы, отличительные признаки и/или преимущества будут или могут стать очевидными для специалиста в данной области при рассмотрении прилагаемых чертежей и подробного описания. Предполагается, что все такие дополнительные системы, способы, отличительные признаки и/или преимущества включены в это описание и защищены прилагаемой формулой изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Компоненты на чертежах не обязательно выполнены в масштабе относительно друг друга. Одинаковые номера позиций обозначают соответствующие элементы на нескольких видах.
ФИГ. 1 представляет собой схему, иллюстрирующую эхо-импульсную конфигурацию ультразвукового преобразователя с соответствующим сигналом;
ФИГ. 2А-2С представляют собой графики, иллюстрирующие пример ультразвуковых сигналов, получаемых на ультразвуковом преобразователе;
ФИГ. 3А-3В представляют собой таблицы, иллюстрирующие влияние каждого параметра (например, коэффициента расширения полосы частот, времени прибытия, несущей частоты, фазы и амплитуды) на параметризованную форму сигнала;
ФИГ. 4А-4Е представляют собой графики, иллюстрирующие пример эхо-импульсной формы сигнала, параметризованной с использованием модели с последовательностью из двух (например, М = 2);
ФИГ. 5А-5D представляют собой графики, иллюстрирующие пример эхо-импульсного сигнала, записанного в скважине и соответствующие вычисления отношения энергий;
На ФИГ. 6 представлен график, иллюстрирующий локализованный эхо-сигнал в примере эхо-импульсного сигнала, показанного на ФИГ. 5А;
На ФИГ. 7А-7D представлены графики, иллюстрирующие влияние использования различных длин кадра для функции отношения энергий;
На ФИГ. 8-10 представлены графики, иллюстрирующие множество способов стробирования согласно описанным здесь вариантам воплощения изобретения;
ФИГ. 11 представляет собой график, иллюстрирующий БПФ кадрированной части примера ультразвукового сигнала;
ФИГ. 12 представляет собой блок-схему, иллюстрирующую примерные операции для автоматического получения характеристик эхо-сигнала, содержащегося в ультразвуковом сигнале;
ФИГ. 13A-13G иллюстрируют результаты параметризации ультразвукового эхо-сигнала с использованием трех гауссовых эхо-сигналов на одной дорожке из примера данных скважины;
ФИГ. 14 представляет собой график, иллюстрирующий увеличенное изображение параметризации с ФИГ. 13A-13F внутри кадрированной части ультразвукового сигнала;
ФИГ. 15А представляет собой график, иллюстрирующий пример дорожки, содержащей явно выраженный приход первого эхо-сигнала;
ФИГ. 15В представляет собой график, иллюстрирующий пример дорожки без явно выраженного прихода первого эхо-сигнала;
На ФИГ. 16А представлен график, иллюстрирующий несколько ультразвуковых сигналов, измеренных в скважине;
На ФИГ. 16В представлен график, иллюстрирующий эхо-сигналы ультразвуковых сигналов с ФИГ. 16А, оцененные с помощью способа параметризации;
На ФИГ. 16C представлен график, иллюстрирующий части измеренных ультразвуковых сигналов с ФИГ. 16А после удаления извлеченных эхо-сигналов с ФИГ. 16В;
На ФИГ. 17А представлен график, иллюстрирующий характеристику чувствительности ультразвукового преобразователя в свободном поле;
На ФИГ. 17В представлен график, иллюстрирующий наблюдаемые эхо-импульсные отклики от 6 мм до 45 мм;
ФИГ. 18А-18F представляют собой графики, иллюстрирующие разложение ультразвукового сигнала;
ФИГ. 19A-19C представляют собой графики, иллюстрирующие сравнение истинного эхо-сигнала, полученного путем выполнения параметризации с использованием модели с последовательностью из двух (М=2) на дорожках, записанных с помощью ультразвукового преобразователя с отклонениями в 10, 20 и 30 мм;
ФИГ. 20 представляет собой известняковый блок, используемый для диагностической визуализации в соответствии с вариантами воплощения, описанными здесь, и
ФИГ. 21A-21D представляют собой результаты визуализации фильтрации и параметризации соответственно.
ПОДРОБНОЕ ОПИСАНИЕ
Если не определено иначе, все технические и научные термины, используемые здесь, имеют такое же значение, как и обычно понимаемое специалистом с обычной квалификацией в данной области. Способы и материалы, подобные или эквивалентные описанным здесь, могут быть использованы в практике или при тестировании настоящего изобретения. Используемые в описании и в прилагаемой формуле изобретения формы единственного числа включают ссылки на множественное число, если из контекста явно не следует иное. Термин "содержащий" и его вариации, используемые здесь, применяется синонимично с термином "включающий" и его вариациями и оба являются свободными, не ограничивающими терминами. Хотя варианты воплощения будут описаны для автоматического получения характеристик эхо-сигнала в ультразвуковом сигнале, генерируемом и обнаруживаемом ультразвуковым преобразователем, расположенным в заполненной жидкостью скважине, специалистам в данной области техники будет очевидно, что варианты воплощения не ограничиваются этим, но применимы для получения характеристик эхо-сигнала в ультразвуковых сигналах в других средах.
Обработка ультразвукового эхо-сигнала
На ФИГ. 1 показана схема, иллюстрирующая эхо-импульсную конфигурацию ультразвукового преобразователя 102 с соответствующим сигналом. Ультразвуковой преобразователь 102 может, необязательно, быть акустическим устройством, предназначенным для установки в заполненную жидкостью скважину. Акустическое устройство может, необязательно, включать множество ультразвуковых преобразователей, например, акустическое устройство может, необязательно, быть акустической решеткой. Скважина может быть пробурена в формации 110, содержащей искомый жидкостный пласт, такой как нефть или газ. Ультразвуковой преобразователь 102, следовательно, может быть использован для получения информации о формации 110, как подробно описано ниже.
Ультразвуковой преобразователь 102 может включать подложку 104, керамический элемент 106 и линию задержки 108. Керамический элемент 106 может включать один или более пьезоэлектрических элементов. Когда импульс напряжения подается на пьезоэлектрический элемент, пьезоэлектрический элемент передает волну давления (например, ультразвуковую волну). Когда отраженная волна давления улавливается пьезоэлектрическим элементом, пьезоэлектрический элемент преобразует перехваченную волну давления в импульс напряжения. Кроме того, линия задержки 108 может быть, необязательно, выполнена с возможностью управления временем задержки ультразвукового импульса, переданного или полученного керамическим элементом 106, минимизирования рассеивания ультразвукового импульса, обеспечения согласования импедансов между передатчиком и приемником и т.д. Ультразвуковые преобразователи хорошо известны в данной области техники и поэтому не описываются с дополнительными подробностями ниже.
Необязательно, ультразвуковой преобразователь 102 может работать в эхо-импульсном режиме или режиме отражения, в котором ультразвуковой преобразователь 102 как излучает ультразвуковой импульс, так и принимает отраженный ультразвуковой импульс. Например, излучаемый ультразвуковой импульс может проходить через текучую среду 120 (например, воду или буровой раствор) и может отражаться от формации 110, прежде чем вернуться обратно к ультразвуковому преобразователю 102. Отраженный сигнал может быть записан в виде измеренного электрического напряжения. Такое измерение называется эхо-импульсным. Эхо-импульс 130A-B показан на ФИГ. 1. Следует понимать, что эхо-импульс может быть результатом отражения от границы соприкосновения бурового раствора (например, эхо-сигнал границы соприкосновения бурового раствора 130A) и/или от формации 110 (например, эхо-сигнал формации 130B). Кроме того, амплитуда эхо-импульса 130A-B зависит от количества газа, присутствующего в буровом растворе, как показано на ФИГ. 1. Кроме того, следует также понимать, что ультразвуковой преобразователь 102 может измерять шум запуска 140.
Эхо-импульсные измерения могут быть использованы для целей визуализации, например, визуализации формации 110. Основой для создания изображения являются два измеряемые атрибута получаемой эхо-импульсной формы сигнала - время прохождения и амплитуда. Следует понимать, что время прохождения представляет собой промежуток времени между возбуждением (или запуском) ультразвукового преобразователя 102 и приемом отраженного ультразвукового эхо-сигнала. Время прохождения может непосредственно коррелировать с размером и формой скважины. Следует понимать, что амплитуда отраженного ультразвукового импульса (например, эхо-импульсной формы сигнала) может быть использована для получения характеристики акустического импеданса текучей среды 120, а также формации 110, включающей изломы, текстуру, впадины и т.д. Необязательно, для выделения указанных выше атрибутов может быть вычислена огибающая Гильберта эхо-импульсной формы сигнала. Амплитуда точки максимума огибающей Гильберта и местоположение, в котором возникла точка максимума, соответствуют, соответственно, амплитуде и времени прохождения основного эхо-сигнала в эхо-импульсной форме сигнала. Как подробно описано ниже, реализация базового принципа извлечения указанных выше атрибутов на практике осложняется.
Ультразвуковой преобразователь 102 может быть функционально соединен с блоком управления 150. Следует понимать, что блок управления 150, необязательно, может быть расположен выше, на и/или ниже поверхности формации 110. Альтернативно или дополнительно блок управления 150 может быть объединен с ультразвуковым преобразователем 102 и расположен в стволе скважины. Ультразвуковой преобразователь 102 и блок управления 150 могут быть соединены посредством линии связи. Это раскрытие в качестве линии связи подразумевает любую подходящую линию связи. Например, линия связи может быть реализована с помощью любого носителя, который облегчает обмен данными между ультразвуковым преобразователем 102 и блоком управления 150, включая, но не ограничиваясь ими, проводные, беспроводные и оптические линии. Блок 150 управления может, необязательно, быть выполнен с возможностью управления ультразвуковым преобразователем 102, а также получения, обработки и хранения акустических данных (например, акустических данных, обнаруженных, собранных, записанных и т.д. с помощью ультразвукового преобразователя 102). В своей наиболее общей конфигурации блок управления 150 обычно включает по меньшей мере один блок обработки данных и системную память. В зависимости от конкретной конфигурации и типа блока управления 150 системная память может быть энергозависимой (такой как оперативное запоминающее устройство (ОЗУ)), энергонезависимой (такой как постоянное запоминающее устройство (ПЗУ), флэш-память и т.д.) или представлять собой какую-либо их комбинацию. Блок обработки данных может быть стандартным программируемым процессором, который выполняет арифметические и логические операции, необходимые для работы блока управления 150.
Например, блок обработки данных может быть выполнен с возможностью выполнения программного кода, закодированного в материальном машиночитаемом носителе. Машиночитаемый носитель относится к любому носителю, способному предоставлять данные, запрашиваемые блоком управления 150 (т.е. машиной) в конкретной форме для его работы. Для предоставления инструкций в блок обработки данных для их выполнения могут быть использованы различные машиночитаемые носители. Типовые материальные машиночитаемые носители информации включают, но не ограничиваются ими, интегральную схему (например, программируемую логическую интегральную схему или специализированную интегральную схему), жесткий диск, оптический диск, магнитооптический диск, гибкий диск, магнитную ленту, голографическое запоминающее устройство, твердотельное устройство, ОЗУ, ПЗУ, электрически стираемое программируемое ПЗУ (ЭСППЗУ), флэш-память или память, выполненную по другой технологии, компакт-диск (CD-ROM), цифровые универсальные диски (DVD) или другое оптическое запоминающее устройство, магнитные кассеты, магнитную ленту, запоминающее устройство на магнитном диске или другие магнитные запоминающие устройства.
Кроме того, блок управления 150 может иметь дополнительные отличительные признаки/функциональные возможности. Например, блок управления 150 может включать дополнительные устройства хранения данных, такие как устройство хранения данных со съемным носителем и устройство хранения данных с несъемным носителем, включая, но не ограничиваясь ими, магнитные или оптические диски или ленты. Блок управления 150 также может содержать сетевое соединение(я), которое позволяет устройству устанавливать связь с другими устройствами. Блок управления 150 может также иметь устройство(а) ввода, такое как клавиатура, мышь, сенсорный экран и т.д. Также может быть включено устройство(а) вывода, такое как дисплей, громкоговорители, принтер и т.д. Дополнительные устройства могут быть подключены к шине для облегчения передачи данных между компонентами блока управления 150. Все эти устройства хорошо известны в данной области техники и нет необходимости обсуждать подробно их здесь.
На ФИГ. 2А-2С показаны графики, иллюстрирующие примеры ультразвуковых сигналов, полученных на ультразвуковом преобразователе. Ультразвуковой сигнал состоит из двух компонентов - фона и измеренного эхо-импульсного сигнала (например, эхо-импульсный отклик от отражателя или эхо-импульсный отклик). Фон включает импульс возбуждения преобразователя и отклик, а также, например, шум. На ФИГ. 2А-2С ультразвуковые сигналы состоят из трех различных областей: импульс возбуждения ультразвукового преобразователя, появляющийся от примерно 0 мкс до 10 мкс, за ним следует отклик ультразвукового преобразователя (например, проявляется затухание колебаний, которые сужаются, начиная с 10 мкс и далее) и, наконец, эхо-импульсный отклик от отражателя, появляющийся на приблизительно 30-й мкс. На ФИГ. 2A показан график, иллюстрирующий ультразвуковой сигнал, произведенный отражателем, расположенным приблизительно в 10 мм от ультразвукового преобразователя. На ФИГ. 2B представлен график, иллюстрирующий эхо-импульс, скрытый в фоне на ФИГ. 2А. На ФИГ. 2C представлен график, иллюстрирующий ультразвуковые сигналы, произведенные отражателями, расположенными приблизительно в 10, 20 и 30 мм, соответственно, от ультразвукового преобразователя.
Амплитуда и время прибытия эхо-импульсного отклика от отражателя (например, эхо-импульсного отклика) могут быть определены с помощью огибающей Гильберта. Время и амплитуда точки максимума огибающей Гильберта могут быть использованы в качестве двух атрибутов эхо-импульсного отклика для целей визуализации. Следует понимать, что существует определенная доля погрешности, возникающей при считывании двух атрибутов из огибающей Гильберта, из-за звона затухания колебаний, присущего ультразвуковому преобразователю. Значимость этой ошибки зависит от времени прибытия отраженного сигнала по отношению к затуханию колебаний ультразвукового преобразователя, где ранее прибывшие импульсы могут быть больше скрыты из-за начального затухания в ультразвуковом преобразователе. В свете ошибок атрибутов амплитуды и времени прибытия, вносимых звоном затухания в ультразвуковом преобразователе, необязательно, требуется устранить эти затухающие колебания фона из получаемого ультразвукового сигнала. Все дорожки, в частности, выборка, будут засорены такими затухающими колебаниями преобразователя. Для решения проблем, обусловленных данной проблемой звона затухания колебаний фона, может быть использован способ параметризации, который подробно обсуждается ниже.
Параметризация
Выявление точной величины атрибутов амплитуды и времени прибытия является вопросом обнаружения первого пика в эхо-импульсном отклике и соответствующего времени, в которое возникает первый пик. Когда отношение сигнал-шум (ОСШ) является достаточным, определение атрибутов эхо-импульсного отклика может быть тривиальным, например, с помощью применения огибающей Гильберта. Однако в тех случаях, когда ОСШ не достаточно (например, при наличии сильного звона затухания колебаний), атрибуты амплитуды эхо-импульсного отклика и времени прибытия могут содержать ошибки.
Как обсуждалось выше, для устранения фона из ультразвукового сигнала для облегчения извлечения эхо-импульсного отклика из ультразвукового сигнала используются статистические способы, такие как усреднение (или наложение), для получения оценки фона, который засоряет эхо-импульсный отклик. Статистические способы могут хорошо работать для оценки фона, когда диапазон времени прибытия эхо-сигнала в выборке достаточно велик, и эхо-сигналы не перекрывают друг друга. Для эффективности статистического способа любого вида должна иметься часть одной дорожки где-либо в выборке, которая не содержит какого-либо фона, в противном случае часть истинного сигнала будет добавлена к оценке фона. Главным образом проблема проявляется, когда прибывший эхо-сигнал не относится к существующему распределению. При каротаже на буровом инструменте в ходе бурения (LWD) номинальный дистанционный диапазон трудно контролировать, и обычно он варьируется между 0,64 см и 2,54 см. Из-за этой узкости дистанционного диапазона эффективное устранение фона с использованием статистических способов может быть затруднено.
Параметризация является альтернативным способом, который может быть использован для устранения эхо-импульсного отклика из ультразвукового сигнала. Благодаря параметризации информация, содержащаяся в нескольких дорожках, независима, а вместо этого, необязательно, может быть использована только отдельная дорожка ультразвуковых данных. Кроме того, можно определить количество и выявить основные ключевые особенности эхо-импульсного отклика (например, время прибытия, амплитуду, фазу, несущую частоту и пропускную способность) в ультразвуковых данных непосредственно во временной области. Это справедливо даже в условиях шума и перекрытия. Кроме того, можно использовать модульные модели, специально разработанные для искомого эхо-импульсного отклика. С помощью такого подхода конкретная ультразвуковая дорожка может быть разложена на эхо-импульсный отклик и остаток, который содержит фон, из одной дорожки. Таким образом, преодолевается затруднение малого изменения расстояния. Кроме того, может быть снижен объем данных, которые должны быть записаны. Параметризацию можно рассматривать как форму сжатия данных, допускающую потери. В условиях внутри скважины, где объем памяти является дефицитным ресурсом, уменьшение объема записанных данных позволяет записывать данные в течение более длительного периода времени. Например, вместо записи сигнала дорожки длиной 256, благодаря параметризации, эхо-импульсный отклик может быть представлен через 5 параметров.
Модель гауссового эхо-сигнала
Модель гауссового эхо-сигнала может быть выбрана, потому что она хорошо подходит для описания ультразвуковых сигналов. Отдельный эхо-сигнал от отражателя может быть представлен в виде:
 ,
,
 ,
,
который воплощает форму гауссовой огибающей. Параметры эхо-сигнала сохраняются в векторе θ, который состоит из пяти переменных:
α 
τ
fc
φ
β
Значения вектора параметров θ прямо соответствуют физическим свойствам отражателя. Время прибытия τ связано с расстоянием от отражателя (например, стенки скважины). α, коэффициент расширения полосы частот, является длительностью эхо-сигнала во временной области. fc является производной от несущей частоты ультразвукового преобразователя. Амплитуда β и фаза φ обусловливают импеданс и размер, и ориентацию (например, угол наклона) по отношению к отражателю. На ФИГ. 3 приведена таблица, которая иллюстрирует влияние каждого параметра на параметризованный сигнал.
Наблюдаемая модель ультразвукового эхо-сигнала
Вейвлет Гаусса применим для моделирования и приближенного представления ультразвуковых сигналов. Наблюдаемую модель отдельного ультразвукового эхо-сигнала, включающую шум и другие искажения, можно представить в виде:
 ,
,
где  является ультразвуковым эхо-сигналом, а
является ультразвуковым эхо-сигналом, а  составляет шум и ошибки (например, компонент ультразвукового сигнала, не охваченный параметризацией).
составляет шум и ошибки (например, компонент ультразвукового сигнала, не охваченный параметризацией).
Модель гауссового эхо-сигнала может быть распространена на аппроксимированные эхо-сигналы большей сложности на основе принципа суперпозиции. Например, аппроксимация эхо-импульса, y(t), может стать суммой M наложенных (полученным способом суперпозиции) гауссовых эхо-сигналов в виде:
 .
.
Вектор параметров  определяет форму и местоположение каждого отдельного эхо-сигнала. Как и в случае параметризации отдельного эхо-сигнала, v(t) представляет собой остаток, который включает шум и аппроксимацию ошибки, связанные со сложностями, которые не могут быть включены в модели более низкого порядка.
определяет форму и местоположение каждого отдельного эхо-сигнала. Как и в случае параметризации отдельного эхо-сигнала, v(t) представляет собой остаток, который включает шум и аппроксимацию ошибки, связанные со сложностями, которые не могут быть включены в модели более низкого порядка.
На ФИГ. 4A-4E показаны графики, иллюстрирующие пример эхо-импульсного сигнала, параметризованного с использованием модели с последовательностью из двух (например, M=2). В частности, на ФИГ. 4А и 4В, соответственно, проиллюстрированы два отдельных гауссовых эхо-сигнала 402 и 404 (например, первый поступил в 26,979 мкс, а второй в 32,0276 мкс). Оригинальный эхо-импульсный сигнал 406 (например, ультразвуковой сигнал) проиллюстрирован на ФИГ. 4E. Как уже обсуждалось здесь, ультразвуковой сигнал представляет собой данные, записанные с помощью ультразвукового преобразователя. Суммирование двух отдельных гауссовых эхо-сигналов 402 и 404 позволяет получить полную оценку поступившего эхо-сигнала. Эта оценка (или реконструкция) 408 показана относительно оригинального эхо-импульсного сигнала 406 на ФИГ. 4D. На ФИГ. 4C показана разница между реконструкцией 408 и оригинальным эхо-импульсным сигналом 406, которая образует остаток 410 (например, ). Остаток 410 включает второй и третий эхо-сигналы, которые имеют меньшее значение параметризации эхо-импульсного отклика, потому что эти эхо-сигналы содержат ограниченную информацию для визуализации.
С помощью параметризации ультразвуковой сигнал (например, оригинальный эхо-импульсный сигнал 406 на ФИГ. 4E), который имеет приблизительно 5000 дискрет в длину, может быть сведен к параметрическому описанию с использованием двух гауссовых вейвлетов эхо-сигнала, каждый из которых включает 5 элементов (то есть 10 параметров всего). Область, где находится первый эхо-сигнал, которая является фокусом параметризации, была аппроксимирована с менее чем 2% ошибок. Кроме того, также стоит отметить реализованное существенное сокращение объема данных, где 10 параметров представления эхо-сигнала дают 50-кратное снижение объема данных по сравнению с оригинальной записью необработанного первого эхо-сигнала (500 дискрет). В таблице 1 ниже показаны оцениваемые параметры для двух отдельных гауссовых эхо-сигналов 402 и 404 на ФИГ. 4А и 4В.
Внедряемый базисный параметрический конструктор (например, модель гауссова эхо-сигнала) и способ его реализации в полной наблюдаемой модели эхо-импульсного сигнала, определение оптимальных параметров модели, которые лучше всего описывают форму импульса ультразвукового сигнала, подробно обсуждаются ниже. Для получения оценки ультразвукового сигнала сравнение может быть произведено между эхо-сигналами, описанными в параметризации, и ультразвуковым эхо-сигналом с соответствующей формой импульса. Изменения в параметрическом оценивании в уравнении (1), приведенном выше (т.е.  ), обусловлены результатами наблюдений за входным сигналом х (например, сигналом, записанным на ультразвуковом преобразователе). Преобразование от пространства параметров к пространству сигналов является нелинейным, даже в том случае, если оно описывается эмпирической моделью гауссового эхо-сигнала. Таким образом, процесс инверсии также нелинеен. Кроме того, подгонка эмпирической модели под реальные данные сбивается шумом и звоном затухания, что затрудняет оценку параметров.
), обусловлены результатами наблюдений за входным сигналом х (например, сигналом, записанным на ультразвуковом преобразователе). Преобразование от пространства параметров к пространству сигналов является нелинейным, даже в том случае, если оно описывается эмпирической моделью гауссового эхо-сигнала. Таким образом, процесс инверсии также нелинеен. Кроме того, подгонка эмпирической модели под реальные данные сбивается шумом и звоном затухания, что затрудняет оценку параметров.
Для решения этой проблемы оценки нелинейного параметра ниже приведена концепция оценки способом максимального правдоподобия (ОМП). ОМП определяется минимизацией целевой функции, состоящей из наблюдаемых данных х (например, ультразвукового сигнала) и текущей параметрической модели сигнала в виде
в виде

Цель состоит в том, чтобы минимизировать разницу между наблюдаемыми данными и параметрической оценкой. В вычислении целевой функции очевидно, что она нелинейна в векторе . В связи с этим задача оптимизации устанавливается в качестве безусловной нелинейной среднеквадратической (СК) задачи, потому что на векторе параметров не существует ограниченной области.
. В связи с этим задача оптимизации устанавливается в качестве безусловной нелинейной среднеквадратической (СК) задачи, потому что на векторе параметров не существует ограниченной области.
Оптимизация Гаусса-Ньютона
Оптимизация Гаусса-Ньютона (ГН) может, необязательно, быть использована для решения вышеупомянутой безусловной СК задачи. С каждой итерацией способа ГН вектор параметров  обновляется, что приводит к улучшению целевой функции. Это раскрытие предусматривает использование других способов для решения безусловной СК задачи, включая, но не ограничиваясь этим, генетический алгоритм (ГА), эволюционную оптимизацию метаэвристического подхода или оптимизацию способом роя частиц (ОРЧ).
обновляется, что приводит к улучшению целевой функции. Это раскрытие предусматривает использование других способов для решения безусловной СК задачи, включая, но не ограничиваясь этим, генетический алгоритм (ГА), эволюционную оптимизацию метаэвристического подхода или оптимизацию способом роя частиц (ОРЧ).
Формулу обновления ГН можно записать в виде
 ,
,
где  является текущей оценкой параметров, и
является текущей оценкой параметров, и  является градиентом модели по отношению к векторам параметров
является градиентом модели по отношению к векторам параметров  .
.  ) является разницей между наблюдаемым сигналом и текущей параметрической реконструкцией.
) является разницей между наблюдаемым сигналом и текущей параметрической реконструкцией.
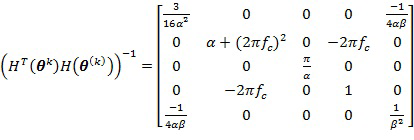
Вектор  состоит из частных производных каждого параметра. Вычисление этих частных производных затратно, что является важным аспектом, поскольку для их обновления частные производные вычисляются заново с каждой итерацией. Учитывая это обстоятельство, чтобы ускорить вычисления, могут быть использованы аналитические градиенты гауссового эхо-сигнала. Матрица градиентов записывается в виде
состоит из частных производных каждого параметра. Вычисление этих частных производных затратно, что является важным аспектом, поскольку для их обновления частные производные вычисляются заново с каждой итерацией. Учитывая это обстоятельство, чтобы ускорить вычисления, могут быть использованы аналитические градиенты гауссового эхо-сигнала. Матрица градиентов записывается в виде


Для дальнейшего уменьшения вычислительной сложности может быть вычислена обратная матрица градиентов  :
:
Алгоритм инверсии может включать следующие этапы:
Этап 1: Начинается с начального приближения для вектора параметров .
Этап 2: Вычисляется градиент  и модель
и модель 
Этап 3: Итерирование вектора параметров:

Этап 4: Проверяется критерий сходимости по отношению к заданному допуску:
 <tol, где tol представляет собой разницу между двумя итерациями параметров, следующих друг за другом. Следует понимать, что, когда вектор параметров итерируется, улучшение каждого из параметров, включенных в вектор параметров, становится несущественным. Допуск является мерой незначительного изменения между новой оценкой вектора параметров (например,
<tol, где tol представляет собой разницу между двумя итерациями параметров, следующих друг за другом. Следует понимать, что, когда вектор параметров итерируется, улучшение каждого из параметров, включенных в вектор параметров, становится несущественным. Допуск является мерой незначительного изменения между новой оценкой вектора параметров (например,  ) и предыдущей оценкой вектора параметров (например, ). Это раскрытие предусматривает, что разница может быть вычислена как абсолютное изменение или как процентное изменение между новыми и предыдущими оценками параметров. Например, допуск может быть, необязательно, установлен на значение tol = 0,01, которое гарантирует, что алгоритм сходится и что последующие улучшения пренебрегаемы. Это раскрытие предусматривает установку допуска на другие значения. Если сходимость была достигнута, завершить, в противном случае перейти к этапу 5.
) и предыдущей оценкой вектора параметров (например, ). Это раскрытие предусматривает, что разница может быть вычислена как абсолютное изменение или как процентное изменение между новыми и предыдущими оценками параметров. Например, допуск может быть, необязательно, установлен на значение tol = 0,01, которое гарантирует, что алгоритм сходится и что последующие улучшения пренебрегаемы. Это раскрытие предусматривает установку допуска на другие значения. Если сходимость была достигнута, завершить, в противном случае перейти к этапу 5.
Этап 5: Установка k→k+1 (и продолжение выполнения итерации).
Инициализация параметра
Для того чтобы параметризовать ультразвуковой сигнал, желательно провести точное начальное приближение первоначального вектора параметров. Как обсуждалось выше, точное начальное приближение может улучшить шанс нахождения оптимального решения, а также уменьшить количество вычислений, требуемых для его нахождения. Чтобы сделать точное начальное приближение, выполняется многостадийный процесс удаления тренда или устранения фона из ультразвукового сигнала, локализации эхо-сигнала в ультразвуковом сигнале и кадрирования ультразвукового сигнала перед параметризацией, что подробно обсуждается ниже. Как обсуждалось выше, ультразвуковой сигнал может быть отдельной дорожкой.
Устранение фона
Необязательно, операция устранения фона может быть применена к ультразвуковому сигналу, чтобы было легче идентифицировать первый импульс в эхо-сигнале. Есть два компонента, которые участвуют в фоне, который может быть удален. Первый происходит от импульса возбуждения ультразвукового преобразователя. Второй обусловливается преодолением посыла сигнала возбужденного пьезоэлектрического элемента ультразвукового преобразователя, который успокаивается через некоторое время. В дополнение к затуханию колебаний пьезоэлектрического элемента также может иметь место некоторое затухание передней части кадра, которая защищает элемент. Когда прибытие эхо-сигнала происходит слишком рано (например, когда отражатель находится на малом расстоянии), то начальный эхо-сигнал может прибыть, в то время как в ультразвуковом преобразователе все еще происходит звон затухания. Это звон затухания может зависеть от тепла и температуры, и взаимосвязь является нелинейной. Для устранения фона были использованы три способа, каждый способ работает на нескольких дорожках для формирования оценки для фона.
Наложение является широко используемым способом для улучшения ОСШ в сейсмических данных. Принцип наложения состоит в том, чтобы сформировать оценку фона с помощью вычисления среднего на наблюдаемых дорожках. Компоненты на дорожках, которые не изменяются, такие как отклик запуска и звон затухания ультразвукового преобразователя, например, могут создавать фон. Кроме того, компоненты на дорожках, которые не изменяются, встречаются на каждой дорожке. Таким образом, когда дорожки в выборке усредняются, компоненты, которые изменяются, могут быть исключены при усреднении с неизменяющимися компонентами для формирования оценки фона.
Другим способом, который может быть использован для оценки фона, является сингулярное разложение (СР). СР представляет собой разложение и ранжирование компонентов дорожек в выборке в зависимости от уровня дисперсии, которая имеет место между дорожками. СР может использоваться для применения основной тенденции в фоне, который засоряет дорожки в ультразвуковой выборке. Из-за того, что все дорожки в выборке совместно используют общий фон, фоновый компонент имеет самый высокий уровень. Остальные оставшиеся содействующие компоненты, такие как эхо-сигналы и шум, например, как правило, слабо коррелированы и должны проявляться в разложении СР с гораздо более низким уровнем по сравнению с фоном.
Использование верхнего значения СР как фона работает аналогично наложению с тем же недостатком, то есть, если эхо-сигналы в дорожках в выборке не обладают достаточной дисперсией, они могут быть основным влияющим фактором для фона в разложении. Кроме того, СР значительно более затратно в вычислительном отношении, чем определение среднего арифметического всех дорожек в выборке.
Альтернативно или дополнительно вычитание является еще одним способом, который может быть использован для оценки фона. Например, если ультразвуковые эхо-сигналы в двух дорожках в достаточной степени разнесены друг от друга (например, длины эхо-сигналов не совпадают в то же время), то фон может быть вычислен способом вычитания. Например, два ультразвуковых сигнала S1 и S2, которые оба состоят из двух достаточно разнесенных эхо-сигналов и общего фона, приведены ниже:
S1=E1+B
S2=E2+B
S1-S2=E1-E2
Вычитание обоих ультразвуковых сигналов один из другого может дать дорожку, которая состоит ровно из двух эхо-сигналов E1 и E2, не содержащих какого-либо фона. Следует понимать, что требование того, чтобы эхо-сигналы не мешали друг другу из-за перекрытия, имеет важное значение. Если эхо-сигналы перекрываются, это может оказать неблагоприятное влияние на полную амплитуду одного или обоих эхо-сигналов из-за конструктивной или деструктивной интерференции. После выполнения вычитания эхо-сигналы могут быть извлечены путем применения двух выборок к ультразвуковым сигналам и вычитания эхо-сигналов из их соответствующей дорожки. Стробирование ультразвуковых сигналов подробно обсуждается ниже. В результате выполняется аппроксимация фона, которая может быть использована для понижения уровня шума ультразвуковых сигналов в выборке.
Локализация эхо-сигнала с использованием способа отношения энергий
После необязательной предварительной обработки ультразвукового сигнала исключением тренда и устранением компонентов фона, область в пределах дорожки, которая содержит первый эхо-сигнал, может быть идентифицирована (или локализована). Причина локализации области, в которой скрыт первый эхо-сигнал, двояка. Во-первых, локализация первого эхо-сигнала облегчает сокращение общего объема данных. Кроме того, локализация первого эхо-сигнала повышает точность, поскольку выполнение параметризации может быть сосредоточено в гораздо более ограниченной области (например, более узком пространстве поиска).
Один из способов локализации первого эхо-сигнала осуществляется путем вычисления отношения энергий дорожки. С использованием функции отношения энергий энергия в заданной точке Ex вычисляется по следующей формуле:
где a1 = поправочный коэффициент энергии 1, = энергия сигнала,
a2 = поправочный коэффициент энергии 2, = энергия шума,
L = длина кадра,  = полная энергия.
= полная энергия.
Следует понимать, что уравнение (16) приводится только в качестве одного примера функции отношении энергий и что любой специалист в данной области может вычислить функцию отношения энергий дорожки другим способом.
Заданная точка х может быть кадрирована с левой и правой сторон дорожки с помощью кадра длиной L. Предполагаемое содержание энергии в левом и правом кадре является шумом и сигналом, соответственно. Отношение создано путем сравнения энергии сигнала с энергией шума. Кроме того, может быть вычислена совокупная сумма энергии, которая содержится в полном сигнале . Поправочные коэффициенты a1 и a2 могут быть использованы для минимизации воздействия прибытия с запаздыванием на оценку первого исчисления. На первый разрыв в сигнале указывает местоположение максимального значения функции отношения энергий.
Типовой ультразвуковой сигнал, измеренный в стволе скважины, используется для иллюстрации этого способа локализации. Типовой ультразвуковой сигнал 502 показан на ФИГ. 5А. Ультразвуковой сигнал 502 включает 512 дискрет, охватывающих диапазон от 0 мкс до 170,66 мкс (например, с частотой дискретизации 3 МГц). Ультразвуковой сигнал, перевернутый слева направо 502' (то есть перевернутый ультразвуковой сигнал), показан на ФИГ. 5B. Другими словами, ультразвуковой сигнал инвертирован с вида «от головы к хвосту» к виду «от хвоста к голове». Например, на ФИГ. 5А дискреты 0-511 расположены слева направо. С другой стороны, на ФИГ. 5B дискреты 0-511 расположены справа налево. Отношение энергий ультразвукового сигнала 502 и перевернутого ультразвукового сигнала 502' может быть вычислено с использованием уравнения (16), приведенного выше, с размером кадра 40 (L=40) и поправочными коэффициентами энергии a1 и a2, приравненными к единице (т.е. 1). Отношение энергий ультразвукового сигнала 502 показано на ФИГ. 5C, а отношение энергий перевернутого ультразвукового сигнала 502' показано на ФИГ. 5D.
Максимальные значения функций отношения энергий указывают на разрывы в ультразвуковом сигнале и перевернутом ультразвуковом сигнале. Другими словами, функции отношения энергий могут быть использованы для идентификации левого и правого разрывов эхо-сигнала в ультразвуковом сигнале. Например, пик отношения энергий ультразвукового сигнала на ФИГ. 5А происходит при t=66 мкс. Это локализует время прибытия эхо-сигнала с левой стороны (или левого разрыва эхо-сигнала). Пик отношения энергий перевернутого ультразвукового сигнала на ФИГ. 5B происходит при t=79,33 мкс. Это может быть использовано для локализации, когда заканчивается эхо-сигнал. Например, если отношение энергий перевернутого ультразвукового сигнала возвращается в первоначальное положение слева направо (или меняется с вида «от хвоста к голове» к виду «от головы к хвосту»), результирующее время для правого разрыва эхо-сигнала составит: t=170,66-79,33=91,33 мкс. Таким образом, прибывающий эхо-сигнал был расположен на позиции левого и правого разрывов (например, 66 мкс и 91,33 мкс). На ФИГ. 6 показан локализованный эхо-сигнал 602 ультразвукового сигнала 502 на ФИГ. 5А.
Длина кадра L функции отношения энергий может определять эффективность отношения энергий. Более короткие длины кадра производят функции отношения энергий с более высоким разрешением, но, при этом, с более высокой чувствительностью к шуму. С другой стороны, увеличенные длины кадра более надежны против шума за счет более низкой разрешающей способности. Поэтому следует внимательно выбирать длину кадра, так, чтобы она была не чувствительна к шуму, но и чтобы было возможно правильно определить первый разрыв в ультразвуковом сигнале.
Необязательно, для автоматического выбора длины кадра отношения энергий может быть использовано уравнение (17), приведенное ниже:

где fs и fc являются частотой дискретизации и несущей частотой ультразвукового сигнала, соответственно. Коэффициент s, как правило, приравненный единице, также включен для настройки длины кадра на основе времени между несколькими прибытиями эхо-сигналов (регулируется свойствами среды, в которой записывается эхо-импульсный отклик). Согласно уравнению (17) длина кадра может быть автоматически и динамически отрегулирована в соответствии с различными частотами дискретизации, а также интервалами времени обнаружения.
На ФИГ. 7А-7D представлены графики, иллюстрирующие влияние использования различных длин кадра на функцию отношения энергий. Например, на ФИГ. 7А показан пример эхо-импульса 702, записанного, когда 250 кГц ультразвуковой преобразователь излучает на алюминиевый отражатель и эхо-импульсный сигнал получен при 25 МГц. Записанный сигнал демонстрирует три уникальные области, например, первый, второй и третий эхо-сигналы 702A, 702B и 702C, соответственно. Как обсуждалось выше, целью локализации эхо-сигнала является правильное определение первого разрыва в эхо-импульсном сигнале. На ФИГ. 7B-7D показаны результаты применения функции отношения энергий к эхо-импульсному сигналу 702 на ФИГ. 7А с использованием длин кадра L=7, 75, 750, соответственно.
Как показано на ФИГ. 7B, если длина окна слишком мала (например, L=7), определение первого разрыва эхо-сигнала затруднено, так как нет легкоразличимого пика в функции отношения энергий. Аналогичным образом, как показано на ФИГ. 7D, также трудно определить первый разрыв эхо-сигнала, когда длина кадра слишком велика (например, L=750). В частности, второй разрыв эхо-сигнала обнаруживается при использовании длины кадра 750 вместо первого разрыва эхо-сигнала, поскольку длина кадра больше, чем местоположение первого эхо-сигнала (например, ~500 дискрет). Как показано на ФИГ. 7С, когда длина кадра составляет 75, первый разрыв эхо-сигнала определяется правильно.
Стробирование эхо-сигнала
После нахождения первого разрыва эхо-сигнала в ультразвуковом сигнале для стробирования записанного эхо-сигнала может быть использовано несколько способов. На ФИГ. 8-10 показаны графики, иллюстрирующие типовые способы стробирования. На ФИГ. 8 функция отношения энергий вычисляется с левой стороны ультразвукового сигнала. Затем ультразвуковой сигнал переворачивается слева направо. Другими словами, ультразвуковой сигнал инвертируется из вида «от головы к хвосту» к виду «от хвоста к голове», как обсуждалось выше в отношении ФИГ. 5А-5В. После этого функция отношения энергий вычисляется с правой стороны ультразвукового сигнала. Как обсуждалось выше, функция отношения энергий с левой стороны может быть использована, чтобы найти первый разрыв эхо-сигнала, например, левый разрыв в ультразвуковом сигнале. Кроме того, функция отношения энергий с правой стороны может быть использована, чтобы найти правый разрыв в ультразвуковом сигнале. Положение правого разрыва затем переворачивается слева направо так, чтобы он был правильно расположен по отношению к левому разрыву. Следует понимать, что левый и правый разрывы могут быть использованы для стробирования первого эхо-сигнала в ультразвуковом сигнале. Стробированная часть 802 каждой дорожки (например, ультразвукового сигнала) заштрихована на ФИГ. 8. Этот способ может быть достаточно надежным и позволяет динамически стробировать первый эхо-сигнал. Следует понимать, однако, что если существует второй эхо-сигнал с достаточной амплитудой, второй эхо-сигнал может быть обнаружен как правый разрыв. В этом случае потери данных не происходит, но стробирование происходит вокруг первого разрыва первого эхо-сигнала и задней части разрыва второго эхо-сигнала.
На ФИГ. 9 функция отношения энергий вычисляется с левой стороны ультразвукового сигнала. Как обсуждалось выше, функция отношения энергий с левой стороны может быть использована, чтобы найти первый разрыв эхо-сигнала, например, левый разрыв в ультразвуковом сигнале. Затем ультразвуковой сигнал обрезается в месте расположения первого разрыва эхо-сигнала. После этого функция отношения энергий вычисляется с левой стороны обрезанного ультразвукового сигнала. Функция отношения энергий с левой стороны обрезанного сигнала может быть использована для нахождения следующего разрыва в ультразвуковом сигнале, который соответствует второму эхо-сигналу. Следует понимать, что первый и последующие разрывы могут быть использованы для стробирования первого эхо-сигнала в ультразвуковом сигнале. Стробированная часть 902 каждой дорожки (например, ультразвуковой сигнал) заштрихована на ФИГ. 9. Этот способ может быть более надежным, чем стробирование с левой стороны ультразвукового сигнала, а затем стробирование с правой стороны перевернутого ультразвукового сигнала, поскольку, как правило, существуют некоторые пробелы между первым и вторым эхо-сигналами, которые вызывают большой скачок в функции отношения энергий, что делает довольно легким определение второго эхо-сигнала. Следует понимать, что при использовании этого способа, может возникнуть больше избыточных данных (например, пробелов между первым и вторым эхо-сигналами), включенных в стробирование.
На ФИГ. 10 функция отношения энергий вычисляется с левой стороны ультразвукового сигнала. Как обсуждалось выше, функция отношения энергий с левой стороны может быть использована для того, чтобы найти первый разрыв эхо-сигнала, например, левый разрыв в ультразвуковом сигнале. Затем жесткий строб устанавливается от положения левого разрыва. Длина жесткого строба может быть определена на основе ожидаемой продолжительности первого эхо-сигнала, которая обусловливается средой, в которой проходит эхо-импульс. Следует понимать, что первый и жесткий разрывы могут быть использованы для стробирования первого эхо-сигнала в ультразвуковом сигнале. Стробированная часть 1002 каждой дорожки (например, ультразвуковой сигнал) заштрихована на ФИГ. 10. Этот способ может быть в вычислительном отношении самым легким из способов, поскольку требуется выполнить только одно вычисление отношения энергий. Кроме того, вычисление первого разрыва эхо-сигнала с левой стороны ультразвукового сигнала является наиболее надежным в сравнении с вычислением функции энергии с правой стороны перевернутого ультразвукового сигнала или снова с левой стороны после обрезки ультразвукового сигнала.
Для того чтобы продемонстрировать каждый из трех способов стробирования, рассмотренных выше со ссылкой на ФИГ. 8-10, ультразвуковой преобразователь, работающий в воде, был использован для сбора данных, отраженных от простого отражателя (например, алюминиевого) при постепенно изменяющемся расстоянии от отражателя. Например, дистанционный диапазон между ультразвуковым преобразователем и отражателем был скорректирован с 1 мм шагом от 0 мм до 41 мм, (дорожки от #1 до #42, соответственно, где дорожка # 1 соответствует 0 мм состоянию), что переместило прибывающий эхо-сигнал дальше от отклика запуска. Результаты демонстрации показаны на ФИГ. 8-10, а несколько общих замечаний приводятся ниже. Как показано на ФИГ. 8-10, стробирование с левой стороны ультразвукового сигнала вполне надежно. Например, первый разрыв в сигнале стробирован полностью до 4 мм, как показано на каждой из ФИГ. 8-10. Кроме того, стробирование с правой стороны ультразвукового сигнала, например, после переворота ультразвукового сигнала слева направо, не так надежно, как стробирование с левой стороны ультразвукового сигнала. Как обсуждалось выше, обнаружение правого разрыва первого эхо-сигнала в ультразвуковом сигнале может быть затруднено при наличии последующих эхо-сигналов (например, второго, третьего и т.д.), прибывающих в одном и том же кадре обнаружения. Например, если пик, относящийся ко второму эхо-сигналу, больше пика, относящегося к первому эхо-сигналу, тогда, если применяется отношение энергий, стробирование будет приложено к концу второго эхо-сигнала, а не к концу первого эхо-сигнала. Когда это происходит, первый и второй эхо-сигналы стробируются, как показано на дорожках под номерами от 21 до 37, как показано на ФИГ. 8. Кроме того, как показано на ФИГ. 9, вычисление левого разрыва, а затем вычисление следующего левого разрыва хорошо работает до приблизительно 10 мм. Как обсуждалось выше, это формирует длины дорожек, которые несколько длиннее, так как стробирование охватывает первый эхо-сигнал и все пробелы до второго эхо-сигнала. Применяя стробирование к эхо-сигналу, можно также использовать избыточность между эхо-сигналами, потому что они все очень похожи при выравнивании с общей привязкой по времени. Это преимущество может пригодиться при применении сжатия для дополнительного уменьшения объема данных в пределах выборки.
Выбор порядка модели
Результат инверсии является результатом суммирования одновременно оптимизированных гауссовых эхо-сигналов. Порядок модели может определять эффективность полной аппроксимации рассматриваемого ультразвукового эхо-сигнала. Например, использование модели высокого порядка позволяет выполнять аппроксимацию более сложных сигналов, но занимает больше времени для приближения к решению. С другой стороны, использование модели низкого порядка предполагает намного меньший объем вычислений, но может потребовать большее количество итераций для приближения к решению. Таким образом, желательно правильно выбрать порядок модели, требуемой для аппроксимации эхо-сигнала.
Чтобы максимизировать эффективность параметризации независимо от того, какой порядок модели выбран, параметризация может быть применена в небольшой локализованной области, например, путем стробирования эхо-части ультразвукового сигнала. Затем эта меньшая локализованная область (или стробированная часть) может быть подвержена анализу на базе использования преобразования Гильберта.
Преобразование Гильберта может быть применено к сигналу с исключенным трендом и стробированному сигналу, чтобы уменьшить вычислительную сложность, а также может быть изучена огибающая Гильберта. Поскольку гауссов эхо-сигнал является эмпирической моделью, выбранной для наилучшей аппроксимации ультразвукового эхо-сигнала, модель одного порядка может быть пригодна для эхо-сигнала и может соответствовать отдельному пику в ультразвуковом сигнале. При изучении огибающей Гильберта гауссового эхо-сигнала может быть определено количество критических пиков.
Количество пиков может быть определено при помощи функции поиска пиков на основе производной. Пик определяется в точке в производной огибающей Гильберта, где градиент изменяется с положительного на отрицательный. Следует понимать, что эти точки определяют пики в функции. В целях дальнейшего уточнения количества определенных пиков может быть применен порог по амплитуде, а также соотношение пиков друг с другом.
Затем порядок модели может быть, необязательно, выбран как показано ниже:
Morder = число критических пиков, обнаруженных в кадре +1.
Выбранный порядок модели может быть увеличен на 1 для учета шума и аберраций, которые могут существовать в ультразвуковом сигнале. Модель дополнительного порядка может быть добавлена для минимизации шума, поскольку предполагается, что эхо-сигналы могут быть скрыты шумом, а оптимизация ГН минимизирована. Если модель дополнительного порядка не добавляется, производится попытка аппроксимации эхо-сигнала внутри кадра для вычисления шума, а также истинного эхо-сигнала внутри кадра. При включении модели дополнительного порядка истинный эхо-сигнал может быть пригоден для моделей, определяемых количеством критических пиков в кадре с оставшимся порядком модели, получая отклонения от неэмпирической модели.
Кадрирование и начальный выбор параметра
После локализации эхо-сигнала, содержащегося в ультразвуковом сигнале, часть ультразвукового сигнала вокруг локализованного эхо-сигнала может быть кадрирована. Как обсуждалось выше со ссылкой на ФИГ. 6, прибывающий эхо-сигнал был локализован между позициями левого и правого разрывов (например, 66 мкс и 91,33 мкс). Необязательно, может быть применен фильтр полуганнирования для сужения частей ультразвукового сигнала за пределами локализованной области (например, <66 мкс и >91,33 мкс). Альтернативно или дополнительно кадр может быть установлен вокруг локализованного эхо-сигнала, то есть на 50% размера длины локализованного эхо-сигнала. Например, кадр может быть установлен следующим образом: [66- , 91,33+]=[52,67 мкс, 106 мкс]. Затем сужение полуганнирования может быть приложено к 5% областей за пределами кадра, чтобы вывести концы ультразвукового сигнала на ноль. После этого, как подробно описано ниже, могут быть выбраны начальные параметры эхо-сигнала. Следует понимать, что использование фильтра полуганнирования предоставляется только в качестве одного примера способа кадрирования и что могут быть использованы другие способы кадрирования.
, 91,33+]=[52,67 мкс, 106 мкс]. Затем сужение полуганнирования может быть приложено к 5% областей за пределами кадра, чтобы вывести концы ультразвукового сигнала на ноль. После этого, как подробно описано ниже, могут быть выбраны начальные параметры эхо-сигнала. Следует понимать, что использование фильтра полуганнирования предоставляется только в качестве одного примера способа кадрирования и что могут быть использованы другие способы кадрирования.
Параметры эхо-сигнала могут быть затем оценены из кадрированной части ультразвукового сигнала. Как более подробно описано ниже, оценки амплитуды и времени прибытия могут быть получены путем вычисления огибающей Гильберта в кадрированной части ультразвукового сигнала, а оценки для несущей частоты и пропускной способности могут быть получены путем вычисления преобразования Фурье (например, с использованием БПФ) кадрированной части ультразвукового сигнала. Данное раскрытие предполагает, что и другие преобразования, известные в данной области техники, могут быть применены к кадрированной части ультразвукового сигнала для облегчения получения параметров эхо-сигнала. Например, кадрированное преобразование Фурье, а затем преобразование Гильберта могут быть использованы в кадрированной части ультразвукового сигнала.
Амплитуда и время прибытия
Оценки для начальных параметров амплитуды и времени прибытия, β и  , могут быть установлены из огибающей кадрированного сигнала (Swin), которая вычисляется как абсолютное значение ее преобразования Гильберта (H). Местоположение и амплитуда максимального значения огибающей (т.е. максимального пика) прямо соответствует амплитуде β1 и времени прохождения 1 эхо-сигнала. Инициализации для последующих моделей, используемых в инверсии (например, М=≥2), устанавливаются с одинаковым размещением их позиций между положением максимального пика и конца кадра инверсии.
, могут быть установлены из огибающей кадрированного сигнала (Swin), которая вычисляется как абсолютное значение ее преобразования Гильберта (H). Местоположение и амплитуда максимального значения огибающей (т.е. максимального пика) прямо соответствует амплитуде β1 и времени прохождения 1 эхо-сигнала. Инициализации для последующих моделей, используемых в инверсии (например, М=≥2), устанавливаются с одинаковым размещением их позиций между положением максимального пика и конца кадра инверсии.
При работе с моделью первого порядка (например, М = 1) амплитуду и время прибытия эхо-сигнала можно найти следующим образом:

Кроме того, при работе с моделями более высоких порядков (например, М≥2) может быть использован временной шаг step. Временной шаг определяется в уравнении (19) ниже. Временной шаг используется для равномерного размещения оставшихся позиций модели, как это определено в уравнении (20) ниже, между местоположением максимального пика и конца кадра инверсии Linv. Значение огибающей Гильберта используется для установки начальных амплитуд на этих точках размещения, которые определяются уравнением (21), приведенным ниже. Для k = 2:M, 
Несущая частота и пропускная способность
Оценка для параметра несущей частоты fc может быть установлена из БПФ кадрированного сигнала. Например, может быть вычислена БПФ кадрированной части ультразвукового сигнала. БПФ кадрированной части ультразвукового сигнала по ФИГ. 7А показана на ФИГ. 11. Максимальное значение БПФ 1102 может быть выбрано в качестве несущей частоты ультразвукового эхо-сигнала, который должен быть параметризирован. Как показано на ФИГ. 11, максимальное значение или пик БПФ 1102 проявляется при примерно 255 кГц. Следует понимать, что это также примерно соответствует частоте ультразвукового преобразователя, которая обсуждалась выше со ссылкой на ФИГ. 7А. Кроме того, при параметризации с используемой моделью порядка 2 или выше может быть использована та же несущая частота для отбора последующих порядков модели до максимального порядка модели (Mmax) в инверсии. Поскольку БПФ не обеспечивает локализацию времени, в течение которого существуют частоты, все из моделей в инверсии инициализируются с той же несущей частотой. Следует понимать, что использование той же несущей частоты для параметра начальной несущей частоты для моделей более высоких порядков достаточно, поскольку другие частоты, которые составляют эхо-сигнал (например, звон затухания), находятся также вблизи максимальной частоты ультразвукового преобразователя. Уравнение (22), приведенное ниже, может быть использовано для выбора параметра начальной несущей частоты. Для k=1:M,
 =
= 
Оценка для параметра начального коэффициента расширения полосы частот  также может быть установлена из БПФ кадрированного сигнала. Как и для несущей частоты, пропускную способность можно выбрать с использованием максимального значения или пика 1102 БПФ. Для определения приблизительной пропускной способности ультразвукового эхо-сигнала могут быть вычислены производные слева и справа от максимального значения в БПФ, пока не будет обнаружено изменение знака. Минимум отмечается, когда производная становится положительной. Затем на левой и правой сторонах от максимального пика БПФ точки минимума подлежат линейной подгонке, которая продолжается книзу в направлении оси х. Квадрат расстояния между левой и правой точками минимума на оси х можно использовать в качестве оценки параметра полосы пропускания. Следует понимать, что тот же коэффициент расширения полосы частот может быть использован для оценки для моделей всех порядков. Уравнение (23), приведенное ниже, может быть использовано для выбора начального параметра пропускной способности. Для k=1:M
также может быть установлена из БПФ кадрированного сигнала. Как и для несущей частоты, пропускную способность можно выбрать с использованием максимального значения или пика 1102 БПФ. Для определения приблизительной пропускной способности ультразвукового эхо-сигнала могут быть вычислены производные слева и справа от максимального значения в БПФ, пока не будет обнаружено изменение знака. Минимум отмечается, когда производная становится положительной. Затем на левой и правой сторонах от максимального пика БПФ точки минимума подлежат линейной подгонке, которая продолжается книзу в направлении оси х. Квадрат расстояния между левой и правой точками минимума на оси х можно использовать в качестве оценки параметра полосы пропускания. Следует понимать, что тот же коэффициент расширения полосы частот может быть использован для оценки для моделей всех порядков. Уравнение (23), приведенное ниже, может быть использовано для выбора начального параметра пропускной способности. Для k=1:M
Фаза
Начальная оценка параметра фазы φ может быть установлена равной нулю для моделей всех порядков. Аргументация для этой оценки обсуждается ниже. Во-первых, если ультразвуковой эхо-сигнал состоит из отдельного чистого импульса, можно было бы точно рассчитать мгновенную фазу. Однако ультразвуковой эхо-сигнал, как правило, состоит из нескольких перекрывающихся компонентов. Другие начальные параметры модели, описанные выше, устанавливаются начальной оценкой, которая несет в себе определенную погрешность, без определения того, как много существует перекрытий между ними. Таким образом, трудно вывести оценку фазы, которая близка к оптимальной. Во-вторых, поскольку фаза является цикличной, а параметризация сходимости нечувствительна к ее значению, приемлема установка начальной фазы на ноль.
Инверсия
После того как основной эхо-сигнал, содержащийся в ультразвуковом сигнале, локализован и кадрирован, можно инвертировать его для множества параметров эхо-сигнала. Как обсуждалось выше, способ Гаусса-Ньютона может быть интегрирован в алгоритм максимизации ожидания (EM). Алгоритм EM имеет структуру, в которой на каждом этапе ожидаемые сигналы вычисляются с использованием текущей оценки вектора параметров и наблюдаемых данных (например, ультразвукового сигнала). Затем соответствующие наборы параметров вычисляются с использованием этих ожидаемых сигналов. В качестве альтернативы можно обновить вектор параметров после этапа максимизации (например, M-этапа). Таким образом, оценка текущего параметра интегрируется в E-этап с целью ускорения сходимости. Этот альтернативный способ известен как пространственно-переменный обобщенный EM алгоритм (SAGE). По сравнению с традиционными алгоритмами ЕМ алгоритм SAGE обладает свойством более быстрой сходимости.
На ФИГ. 12 показана блок-схема, иллюстрирующая типовые операции 1200 для автоматического получения характеристик эхо-сигнала, содержащегося в ультразвуковом сигнале. Как обсуждалось выше, ультразвуковой сигнал может быть сгенерирован с помощью ультразвукового преобразователя. После отражения от отражателя данные, соответствующие ультразвуковому сигналу, могут быть получены ультразвуковым преобразователем. Необязательно, ультразвуковой преобразователь может быть расположен в заполненной жидкостью скважине, а ультразвуковой сигнал может быть отражен от пласта. Необязательно, данные, соответствующие ультразвуковому сигналу, могут быть предварительно обработаны, например, отфильтрованы, чтобы удалить или уменьшить тренд и/или посторонний шум. Эти данные могут быть предварительно обработаны в соответствии с любым из способов, описанных здесь.
Следует иметь в виду, что логические операции, описанные здесь в отношении различных фигур, могут быть реализованы (1) в виде последовательности осуществляемых компьютером действий или программных модулей (например, программным обеспечением), исполняемым на вычислительном устройстве, (2) в виде взаимосвязанных машинных логических схем или схемных модулей (т.е. аппаратным обеспечением) в пределах вычислительного устройства и/или (3) как сочетание программного и аппаратного обеспечения вычислительного устройства. Таким образом, логические операции, рассмотренные здесь, не ограничены какой-либо конкретной комбинацией аппаратного и программного обеспечения. Реализация является вопросом выбора, который зависит от производительности и других требований для вычислительного устройства. Соответственно, логические операции, описанные здесь, упоминаются по-разному как операции, структурные устройства, действия или модули. Эти операции, структурные устройства, действия и модули могут быть реализованы в программном обеспечении, в прошивке, в цифровой логике специального назначения и любой их комбинации. Должно быть также очевидно, что может быть выполнено большее или меньшее количество операций, чем показано на фигурах и описано здесь. Эти операции также могут быть выполнены в ином порядке, чем тот, который описан здесь.
Необязательно, в 1202 ультразвуковой сигнал может быть предварительно обработан, например, отфильтрован, чтобы устранить или уменьшить тренд и/или посторонний шум, как описано выше. В 1204 может быть вычислено отношение энергий ультразвукового сигнала, а эхо-сигнал, содержащийся в ультразвуковом сигнале, может быть локализован с использованием отношения энергий. Отношение энергий может быть вычислено, а эхо-сигнал может быть локализован в соответствии с любым из способов, описанных здесь. В 1206 часть ультразвукового сигнала может быть кадрирована вокруг локализованного эхо-сигнала. Ультразвуковой сигнал может быть кадрирован в соответствии с любым из способов, описанных здесь. В 1208 может быть вычислено БПФ и огибающая Гильберта кадрированной части ультразвукового сигнала. Затем в 1210 начальные параметры инверсии (например, начальные векторы параметров, ϴ  ) могут быть оценены из БПФ и огибающей Гильберта кадрированной части ультразвукового сигнала. Следует понимать, что количество итераций и количество эхо-сигналов может быть первоначально установлено на 0 (например,
) могут быть оценены из БПФ и огибающей Гильберта кадрированной части ультразвукового сигнала. Следует понимать, что количество итераций и количество эхо-сигналов может быть первоначально установлено на 0 (например,  =0 и
=0 и  =0). В 1212 параметрическая модель эхо-сигнала (например, ожидаемый ультразвуковой сигнал) для эхо-сигнала mth может быть вычислена на основе текущего вектора параметров
=0). В 1212 параметрическая модель эхо-сигнала (например, ожидаемый ультразвуковой сигнал) для эхо-сигнала mth может быть вычислена на основе текущего вектора параметров  и наблюдаемых данных y (например, ультразвукового сигнала), например, согласно
и наблюдаемых данных y (например, ультразвукового сигнала), например, согласно  )+
)+ . Этап 1212 можно назвать этапом ожидания. В 1214 с использованием параметрической модели эхо-сигнала, вычисленной выше, может быть вычислен новый вектор параметров
. Этап 1212 можно назвать этапом ожидания. В 1214 с использованием параметрической модели эхо-сигнала, вычисленной выше, может быть вычислен новый вектор параметров  , например, как оценка способом максимального правдоподобия (ОМП) для
, например, как оценка способом максимального правдоподобия (ОМП) для . Например, новый вектор параметров может быть определен в соответствии с
. Например, новый вектор параметров может быть определен в соответствии с  . Этап 1214 может быть назван этапом максимизации. Другими словами, этап максимизации соответствует ОМП отдельного эхо-сигнала с параметрической моделью эхо-сигнала для эхо-сигнала mth, например,
. Этап 1214 может быть назван этапом максимизации. Другими словами, этап максимизации соответствует ОМП отдельного эхо-сигнала с параметрической моделью эхо-сигнала для эхо-сигнала mth, например, . Затем, на следующем шаге ожидания, параметрическая модель эхо-сигнала для следующего сигнала или эхо-сигнала mth+1, например,
. Затем, на следующем шаге ожидания, параметрическая модель эхо-сигнала для следующего сигнала или эхо-сигнала mth+1, например,
 может быть вычислена с использованием недавно обновленного вектора параметров . В 1216 выполняется определение в отношении того, был ли обновлен вектор параметров для каждого из эхо-сигналов. Если НЕТ, m устанавливается равным m+1, и способ возвращается к этапу 1212. Если ДА (например, m>M), способ продолжается на этапе 1218, где выполняется определение в отношении того, была ли достигнута сходимость, например,
может быть вычислена с использованием недавно обновленного вектора параметров . В 1216 выполняется определение в отношении того, был ли обновлен вектор параметров для каждого из эхо-сигналов. Если НЕТ, m устанавливается равным m+1, и способ возвращается к этапу 1212. Если ДА (например, m>M), способ продолжается на этапе 1218, где выполняется определение в отношении того, была ли достигнута сходимость, например,  . Другими словами, выполняется определение того, является ли изменение вектора параметров между текущей и предыдущей итерацией меньше заданного допуска. Если ДА, способ заканчивается, и множество параметров эхо-сигналов считается вычисленным. Если НЕТ, процесс переходит к этапу 1212, например, m устанавливается равным 1, и k устанавливается равным k+1. Соответственно, можно выполнять итерацию, пока критерий сходимости не будет достигнут.
. Другими словами, выполняется определение того, является ли изменение вектора параметров между текущей и предыдущей итерацией меньше заданного допуска. Если ДА, способ заканчивается, и множество параметров эхо-сигналов считается вычисленным. Если НЕТ, процесс переходит к этапу 1212, например, m устанавливается равным 1, и k устанавливается равным k+1. Соответственно, можно выполнять итерацию, пока критерий сходимости не будет достигнут.
Примеры: Процесс параметризации реальных данных
Реальные данные (Отдельная дорожка)
Чтобы продемонстрировать результат выполнения алгоритма параметризации на реальном наборе данных скважины, полученном в условиях эксплуатации, были использованы тестовые данные скважины. Набор данных состоит из 1148 дорожек, состоящих из 512 дискрет, каждая с частотой дискретизации 3 МГц. Дискрета из этого набора данных была выбрана для параметризации с использованием трех гауссовых эхо-сигналов (M =3). ФИГ. 13А-13G иллюстрируют результаты параметризации ультразвукового эхо-сигнала с использованием трех гауссовых эхо-сигналов на примере данных скважины. ФИГ. 13А представляет собой таблицу, иллюстрирующую оптимальные параметры для каждого из гауссовых эхо-сигналов, полученных способом инверсии. На ФИГ. 13B представлен график, иллюстрирующий ультразвуковой сигнал, измеренный ультразвуковым преобразователем, расположенным в скважине. ФИГ. 13C представляет собой график, иллюстрирующий ультразвуковой сигнал, восстановленный с использованием гауссовых эхо-сигналов. На ФИГ. 13D приведен график, иллюстрирующий разницу между измеренным и восстановленным ультразвуковыми сигналами, показанными на ФИГ. 13В и 13С, соответственно. На ФИГ. 13E-13G представлены графики, иллюстрирующие каждый из гауссовых эхо-сигналов. Кроме того, на ФИГ. 14 представлен график, иллюстрирующий увеличенный вид параметризации, показанной на ФИГ. 13C, например, кадрированной части ультразвукового сигнала.
Реальные данные (несколько дорожек)
Для применения способа параметризации на крупномасштабном наборе данных остальная часть дорожек в наборе данных, полученном из скважины, подлежала параметризации для специальной проверки надежности выполнения функций локализации и кадрирования. В наборе данных 1148 дорожек 95% дорожек содержат явно выраженный первый прибывший эхо-сигнал. На ФИГ. 15A представлен график, иллюстрирующий пример дорожки, содержащей явно выраженный первый прибывший эхо-сигнал. В оставшихся 5% дорожек существует явно выраженный импульс запуска, однако нет прибывшего эхо-сигнала. На ФИГ. 15B представлен график, иллюстрирующий пример дорожки, которая не содержит явно выраженного первого прибывшего эхо-сигнала. В 95% случаев, когда первый эхо-сигнал явно различим, алгоритм параметризации для первого эхо-сигнала успешно локализован, кадрирован и инвертирован (например, 2% точность параметризации в примерно 30 итерациях/1 мс времени обработки с использованием M=3). В тех случаях, когда эхо-сигнал не был явно различим, импульс возбуждения был кадрирован и параметризован. На ФИГ. 16A представлен график, иллюстрирующий несколько ультразвуковых сигналов, измеренных в скважине. На ФИГ. 16B представлен график, иллюстрирующий эхо-сигналы ультразвуковых сигналов, показанных на ФИГ. 16A, оцениваемые способом параметризации. ФИГ. 16C представляет собой график, иллюстрирующий части измеренных ультразвуковых сигналов, показанных на ФИГ. 16A, после удаления извлеченных эхо-сигналов, показанных на ФИГ. 16В.
Извлечение эхо-сигнала из зашумленного фона
Чтобы проверить эффективность алгоритма для извлечения начальных параметров эхо-сигнала из фона в одном кадре, были использованы лабораторные эхо-импульсные данные, полученные с помощью алюминиевого отражателя при переменном удалении от 6 мм до 45 мм. На ФИГ. 17A представлен график, иллюстрирующий чувствительность ультразвукового преобразователя в свободном поле. На ФИГ. 17B представлен график, иллюстрирующий наблюдаемые эхо-импульсные отклики от 6 мм до 45 мм. Как показано на ФИГ. 17A-17B, существует внутренний звон затухания ультразвукового преобразователя, который скрывает приходящий эхо-сигнал при разных уровнях точности, по мере того как дистанция уменьшается. Для сравнения точности параметризации также был записан истинный отклик в свободном поле ультразвукового преобразователя, показанный на ФИГ. 17А. Для верификации истинный отклик свободного поля может быть вычтен из наблюдаемой дорожки, загрязненной фоном, для получения истинного эхо-сигнала. Значение времени прибытия, а также амплитуду этого эхо-сигнала можно сравнить с истинным эхо-сигналом, чтобы оценить, насколько точно извлечен скрытый эхо-сигнал.
На ФИГ. 18А-18F показаны графики, иллюстрирующие разложение ультразвукового сигнала. Ультразвуковой сигнал записывается на удалении 8 мм от отражателя. В ультразвуковом сигнале исключен тренд (например, с использованием двухкомпонентной линейной подгонки), он стробирован и затем параметризован. Чтобы проиллюстрировать результат параметризации, используется сигнал, записанный с помощью отражателя, расположенного на удалении 8 мм от ультразвукового преобразователя. На этом расстоянии до отражателя звон затухания фона значительно загрязняет приходящий эхо-сигнал. Цель состоит в том, чтобы чисто извлечь эхо-сигнал из этого фона.
Дорожка является первой предварительной обработкой, осуществляющейся путем устранения экспоненциального тренда, стробирования и параметризации с использованием модели порядка 3 (M=3). Сигнал с исключенным трендом и стробированием показан на ФИГ. 18А. На ФИГ. 18B представлен график, иллюстрирующий параметрическую реконструкцию в сравнении с исключенным трендом и стробированием сигнала на ФИГ. 18А. Как показано на ФИГ. 18В, параметризация полностью аппроксимирует сигнал с исключенным трендом и со стробированием, который также указан на ФИГ. 18C, иллюстрирующей разницу между сигналом с исключенным трендом и со стробированием и параметрической реконструкцией. В области, представляющей интерес (например, в местоположении основного пика и самой низкой точке приходящего эхо-сигнала), ошибка составляет около 1%. На ФИГ. 18D-18F представлены графики, иллюстрирующие построение реконструкции. Из трех моделей, которые составляют реконструкцию, первая модель (№1) имеет самую высокую амплитуду. Оставшиеся два эхо-сигнала (модель №2 и модель №3) используются для представления фона (так как эта часть сигнала не так хорошо подходит для гауссовой эмпирической модели, как эхо-сигнал, скрытый внутри).
Поскольку эта первая модель, которая создает параметризацию, принята за истинный эхо-сигнал, желательно определить, насколько хорошо он сопоставлен с фактическим эхо-сигналом. Для этого сравнения фон удаляется из сигнала путем вычитания измеренного отклика преобразователя в свободном поле. ФИГ. 19A-19C представляют собой графики, иллюстрирующие сравнение между истинным эхо-сигналом, полученным путем выполнения параметризации с использованием модели порядка 2 (M=2) на дорожках, записанных ультразвуковым преобразователем на расстоянии 10 , 20 и 30 мм. Истинный эхо-сигнал 1906 определяется вычитанием отклика ультразвукового преобразователя в свободном поле из наблюдаемого эхо-сигнала 1902. Модель или параметризованный эхо-сигнал 1904, который имеет самую высокую амплитуду, выбран в качестве эхо-компонента. Из первоначально наблюдаемых стробированных сигналов непосредственное получение амплитуды и формы скрытого эхо-сигнала может быть затруднено, но после параметрического извлечения истинный эхо-сигнал может быть четко выявлен. Как показано на ФИГ. 19A-19C, параметризованный эхо-сигнал 1904 накладывается на истинный эхо-отклик 1906. Во всех случаях ошибка основных пиков и впадин эхо-сигнала не превышает 5%, даже на близком расстоянии (10 мм от отражателя), где они существенно перекрываются затухающим фоном.
Тесты визуализации
Чтобы продемонстрировать эффективность способа параметризации с точки зрения визуализации, параметризация сравнивается с прямым извлечением параметров с помощью фильтрации.
На ФИГ. 20 показан известняковый блок 2000 (90×76×40 мм), используемый в тестах визуализации в соответствии с вариантами воплощения, обсуждаемыми здесь. Для набора данных известняковый блок 2000 с шестью щелями (2,5×28 мм) 2002 с различным интервалом, например, 2, 5, 8, 10 и 12 мм, как показано, был погружен в воду и просканирован на расстоянии 20 мм в горизонтальной плоскости, параллельной поверхности блока. Сканирование производилось с 1 мм шагом, охватывая область 119×95 мм (например, 11305 дискрет). Несущая частота ультразвукового преобразователя составляла около 375 МГц.
Набор данных был обработан двумя способами: первый - с использованием параметризации, и второй, использующий способ фильтрации, где параметры непосредственно извлекаются из наблюдаемых дорожек после применения полосового фильтра, центрированного вблизи несущей частоты преобразователей. В обоих способах изображения были получены с использованием пяти ключевых атрибутов эхо-сигнала (например, времени прохождения, амплитуды, пропускной способности (или кривизны в случае фильтрации), несущей частоты и фазы).
На ФИГ. 21A-21B приведены результаты визуализации для фильтрации и параметризации, соответственно. Поскольку ультразвуковой преобразователь работает под воздействием давления окружающей среды, сопряжение не является оптимальным, в результате чего возникает звон затухания, и амплитуды прибывающих эхо-сигналов относительно невелики. В отличие от фильтрации, параметризация использует весь сигнал в стробировании для оценки эхо-параметров, что приводит к использованию большей части сигнала как временной основы в формировании оценки параметров. Преимущество этого очевидно на всех пяти графиках. В общем, изображения, полученные для эхо-сигналов, характеризуемых через параметризацию, можно анализировать более подробно по сравнению с фильтрацией. В отличие от фильтрации, параметризация использует весь сигнал в кадре для оценки параметров эхо-сигнала. Преимущество этого очевидно на всех пяти графиках. Цветовые шкалы всех изображений были сохранены так, что изображения отображаются с подобным динамическим диапазоном.
При рассмотрении изображения, получаемого с помощью времени прохождения эхо-сигнала, очевидно, что блок не был расположен точно параллельно по отношению к ультразвуковому преобразователю во время сканирования. При использовании параметризации для определения времени прибытия, явно видно, что цвет постепенно пропадает (что свидетельствует об увеличении времени прохождения из-за наклона). Фильтрованное изображение имеет небольшую градацию цвета, но отображение деталей щелей не очень четкое. С точки зрения амплитуды, результаты похожи, но с параметризацией определение крайней левой щели гораздо более четкое. При сравнении изображений, генерируемых с использованием пропускной способности (или, в случае фильтрации, кривизны), области с двумя крайними левыми, наиболее близко расположенными щелями были проработаны значительно более детально с использованием параметризации. Из всех параметрических атрибутов несущая частота наиболее чувствительна к небольшим изменениям в сканируемом пласте, о чем свидетельствует разрешение двух наиболее близко расположенных щелей. При использовании фильтрации изображение несущей частоты зернистое и имеет недостаточный контраст, в то время как при использовании параметрического метода детали в изображении более четко выражены (особенно в контрасте щелей, а также в отображении некоторых деталей текстуры поверхности блока). Наконец, изображения, использующие фазирование прибывающего эхо-сигнала, выглядят так же, но изображение, получаемое с использованием параметризации, имеет превосходную контрастность.
Хотя объект изобретения был описан на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что объект изобретения, определяемый в прилагаемой формуле изобретения, не обязательно ограничен конкретными признаками или действиями, описанными выше. Напротив, конкретные признаки и действия, описанные выше, раскрыты как примерные формы воплощения заявленного объекта изобретения.
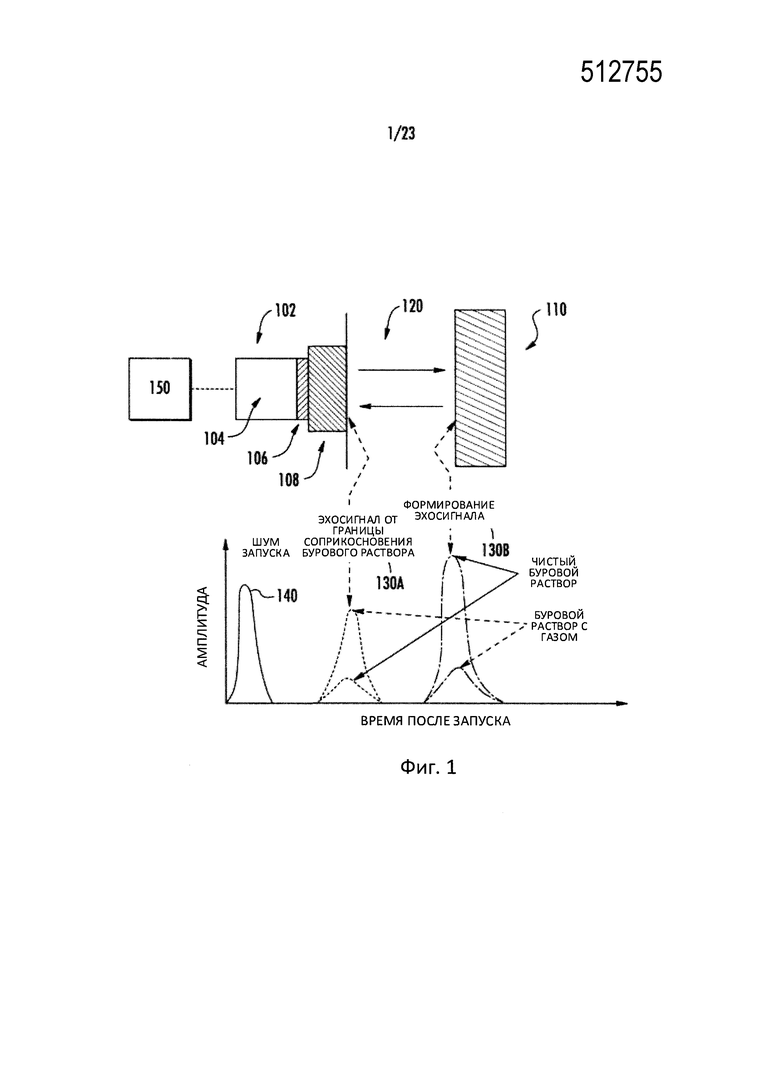
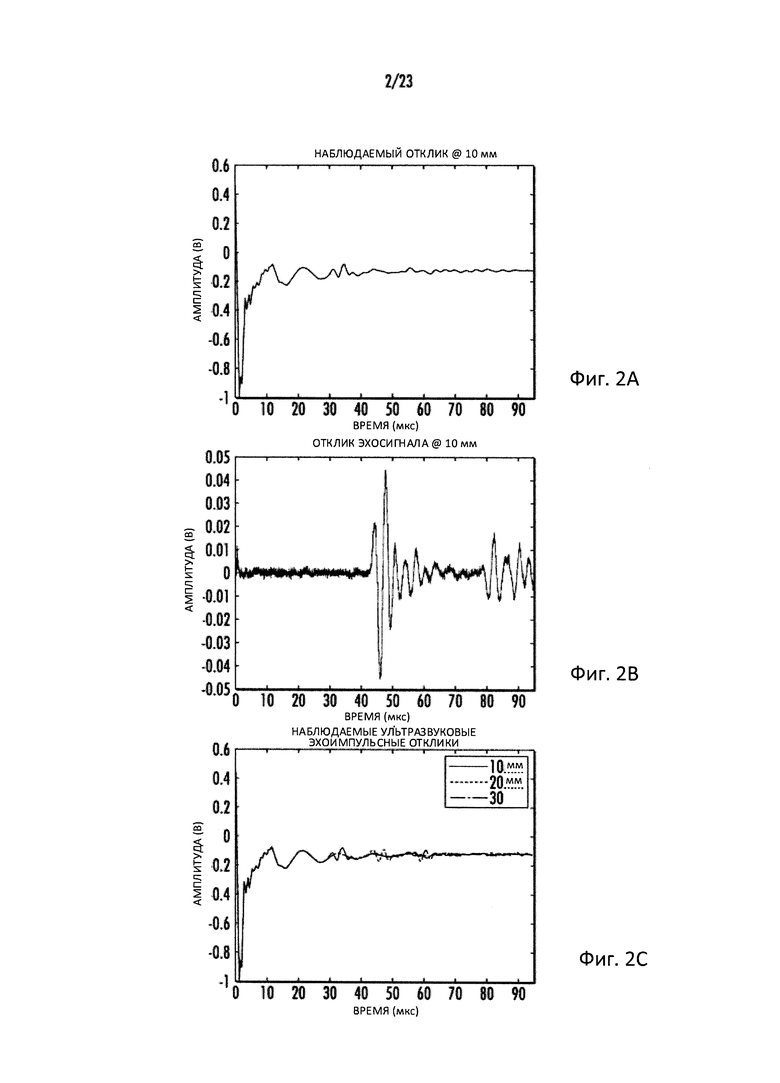
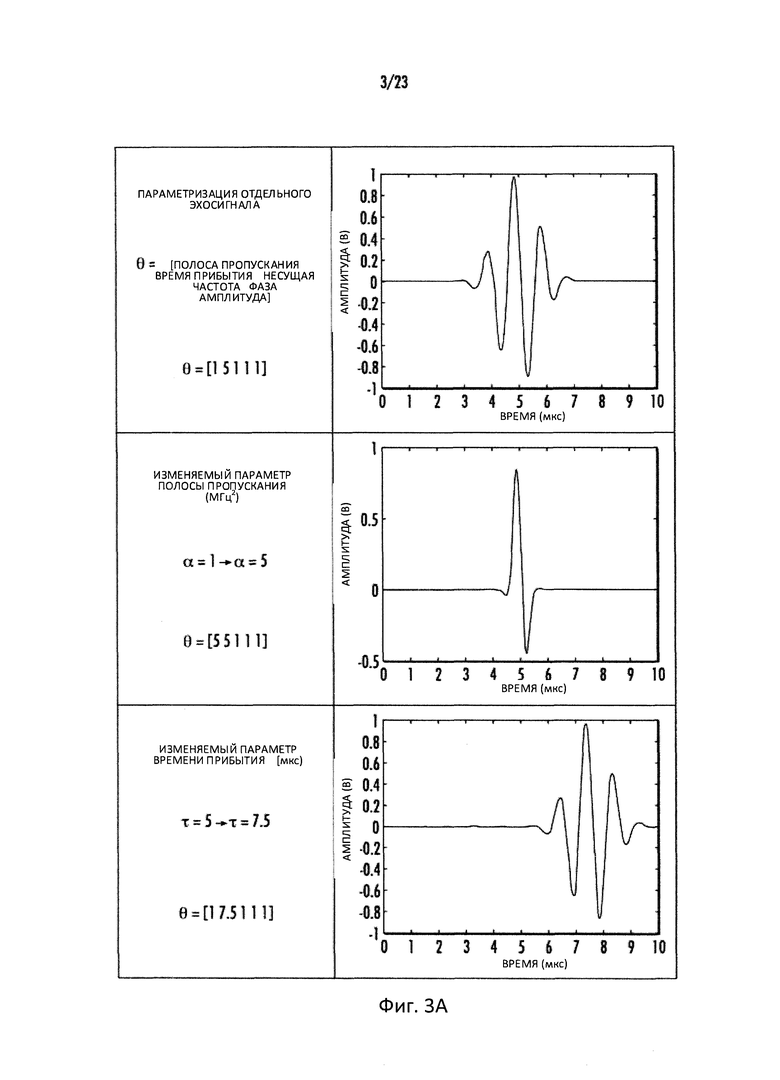
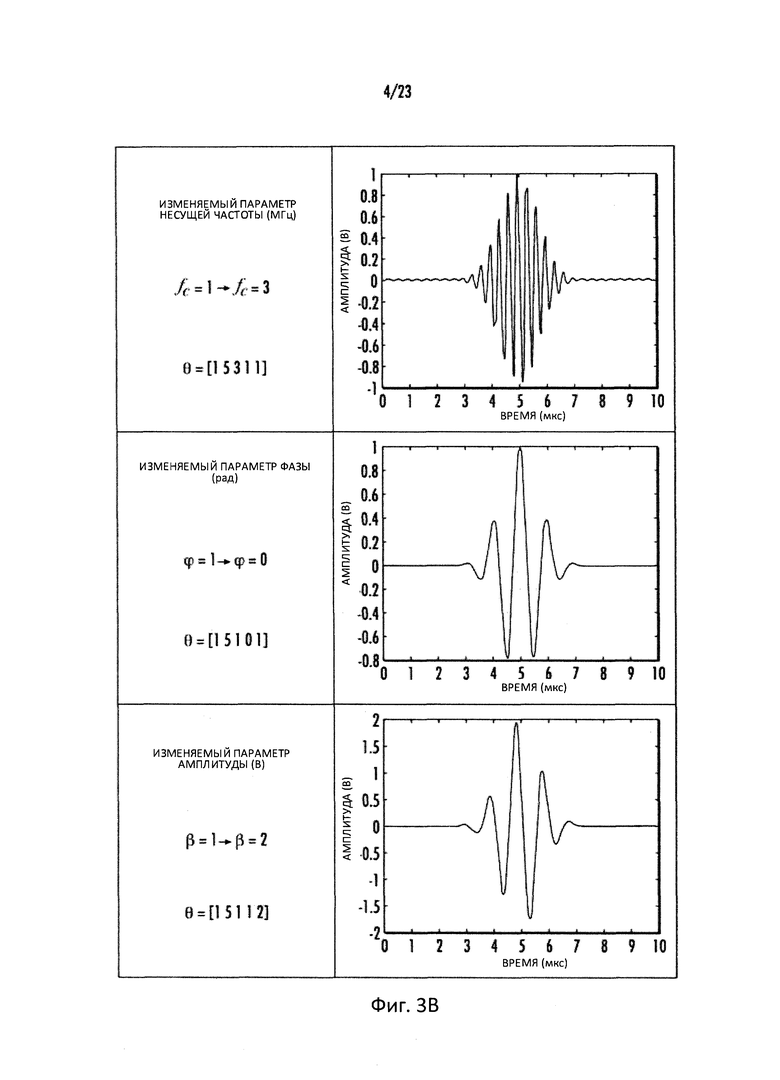
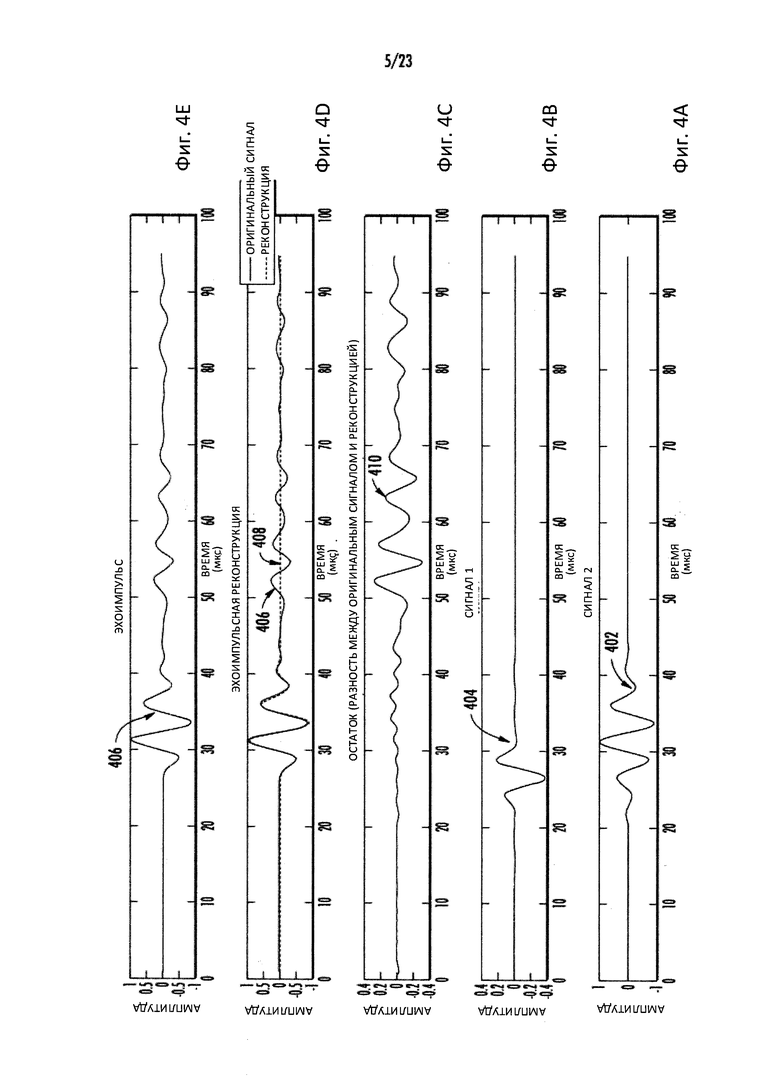
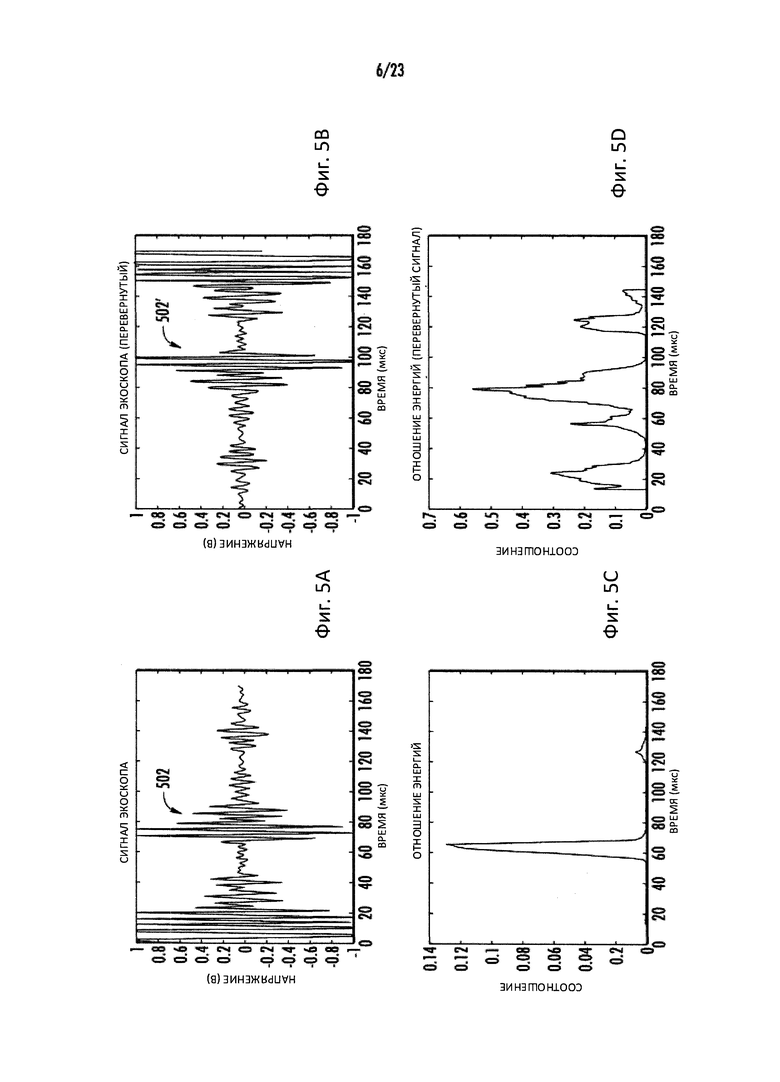
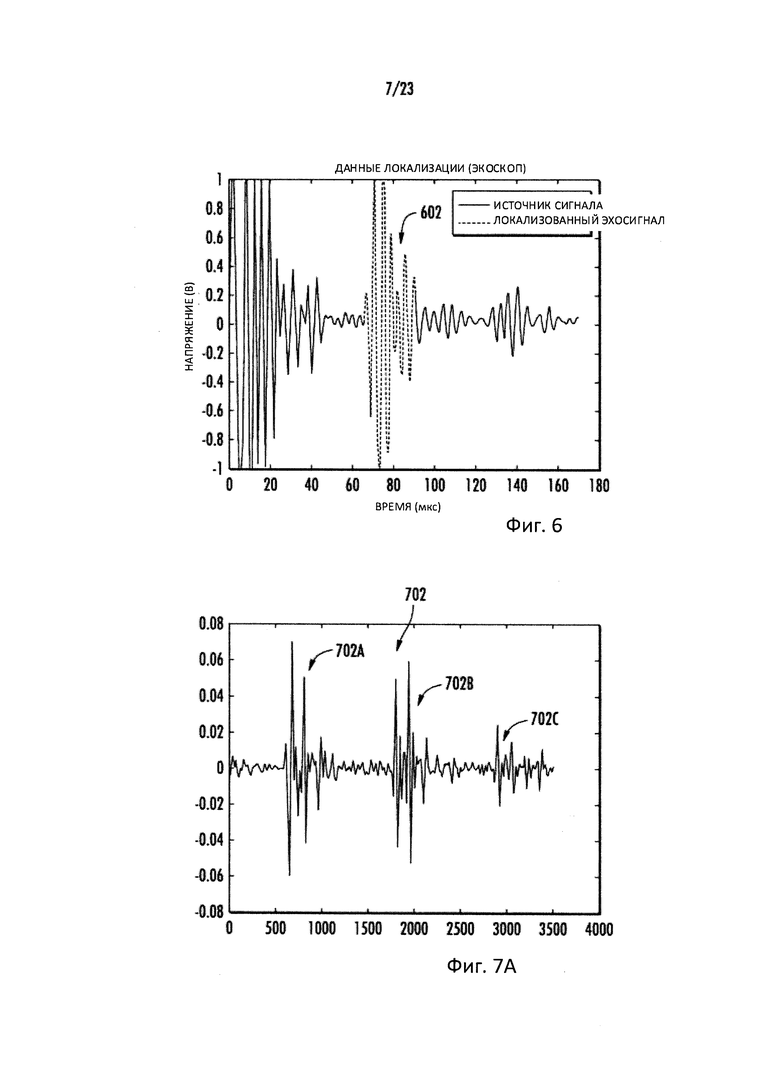
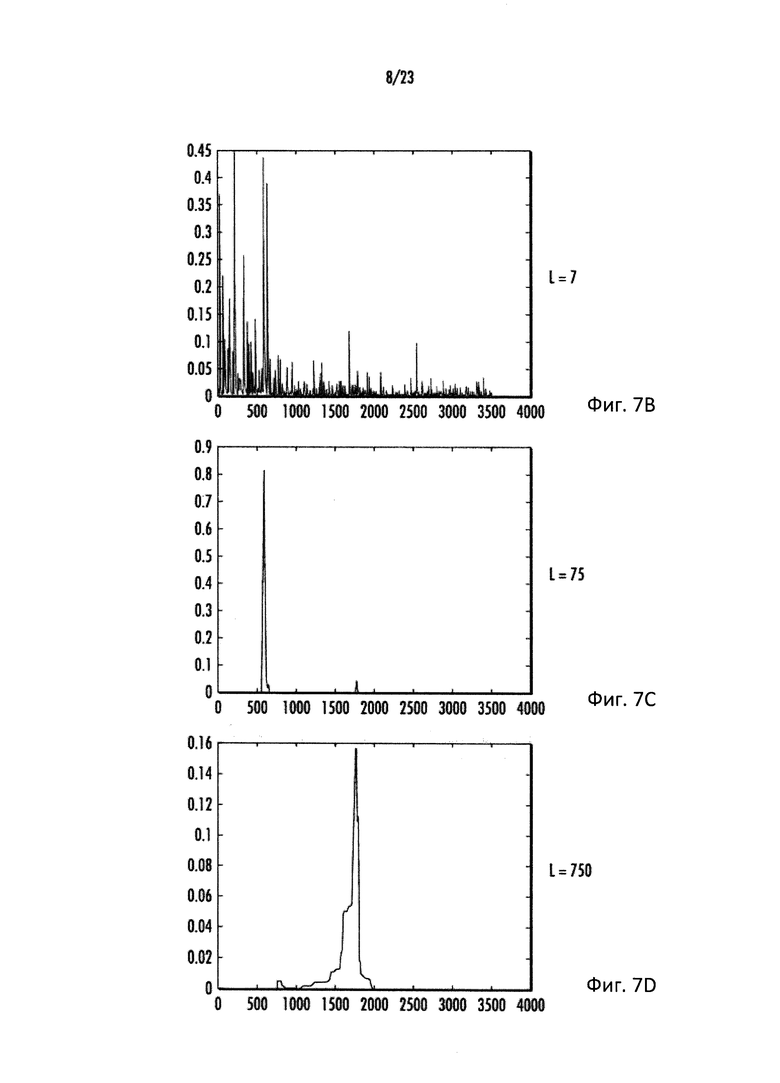
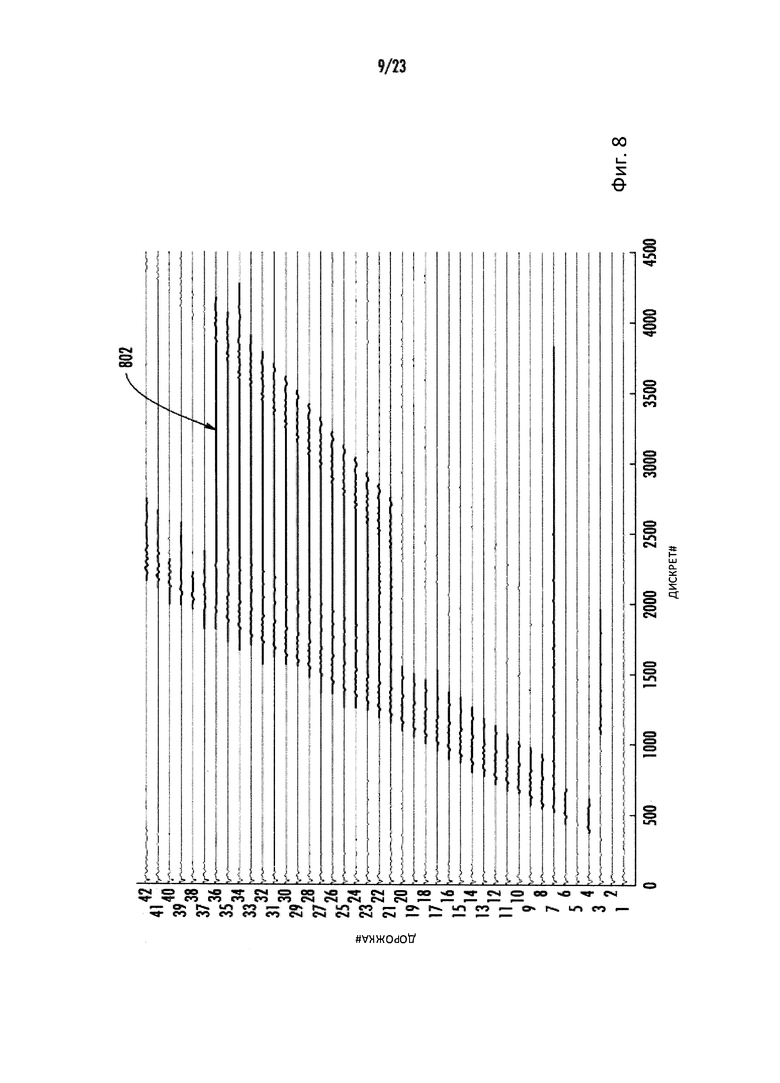
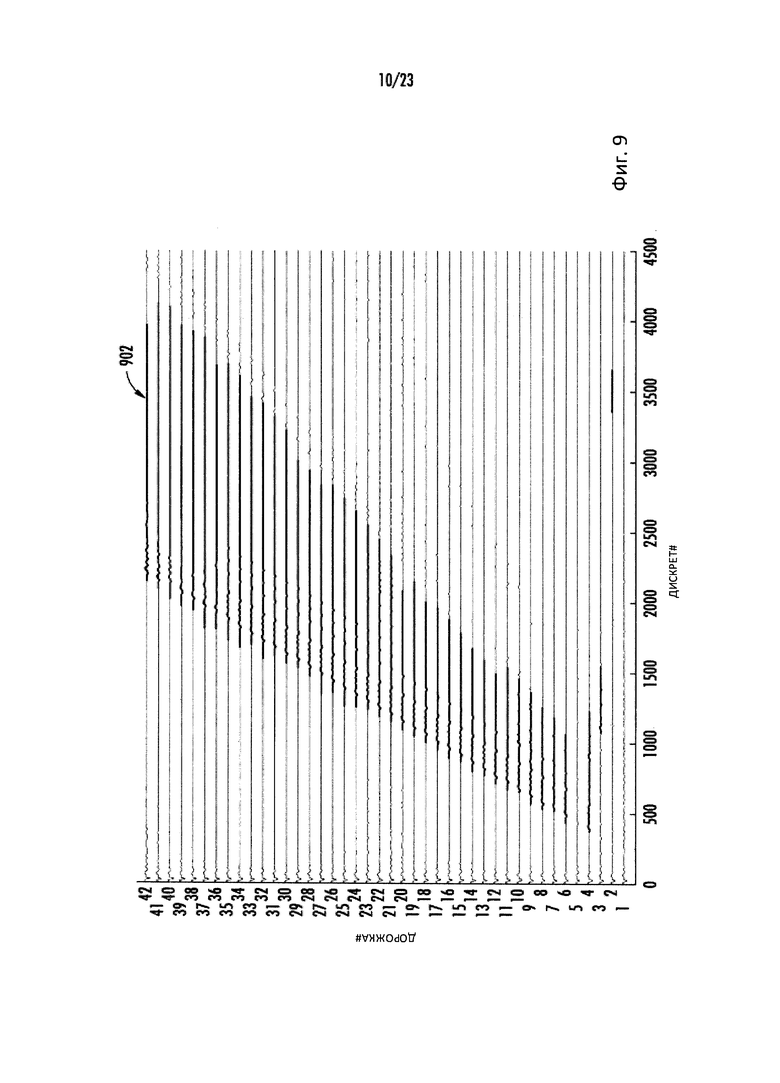
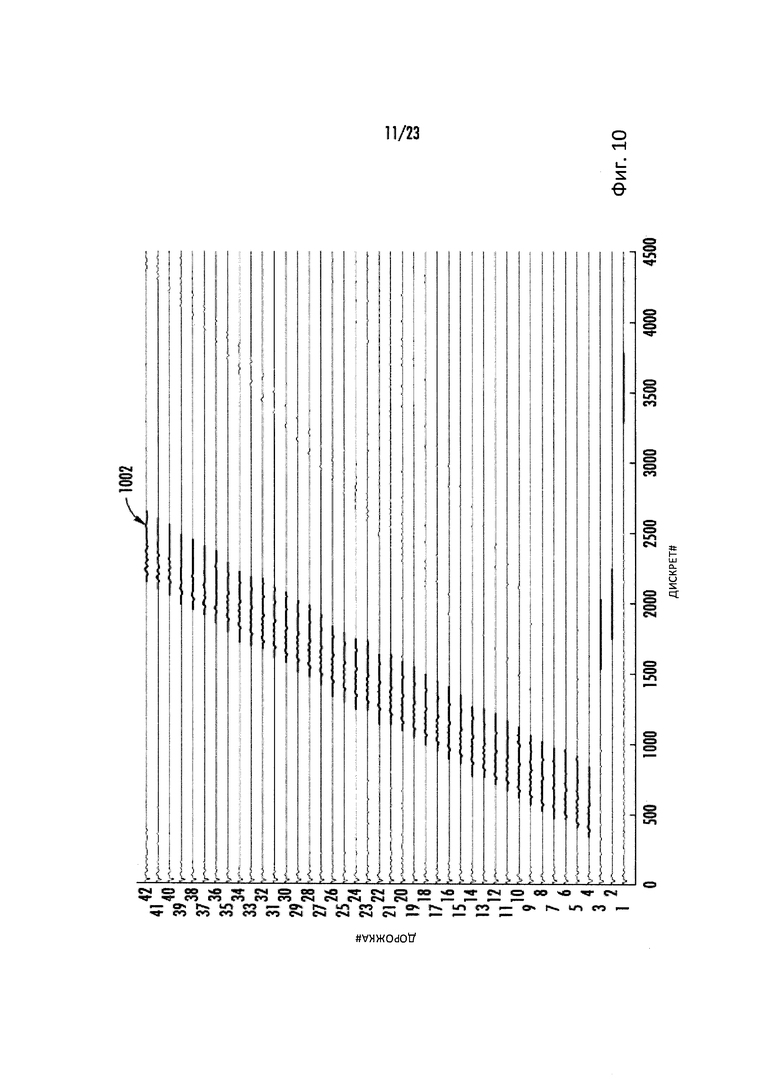
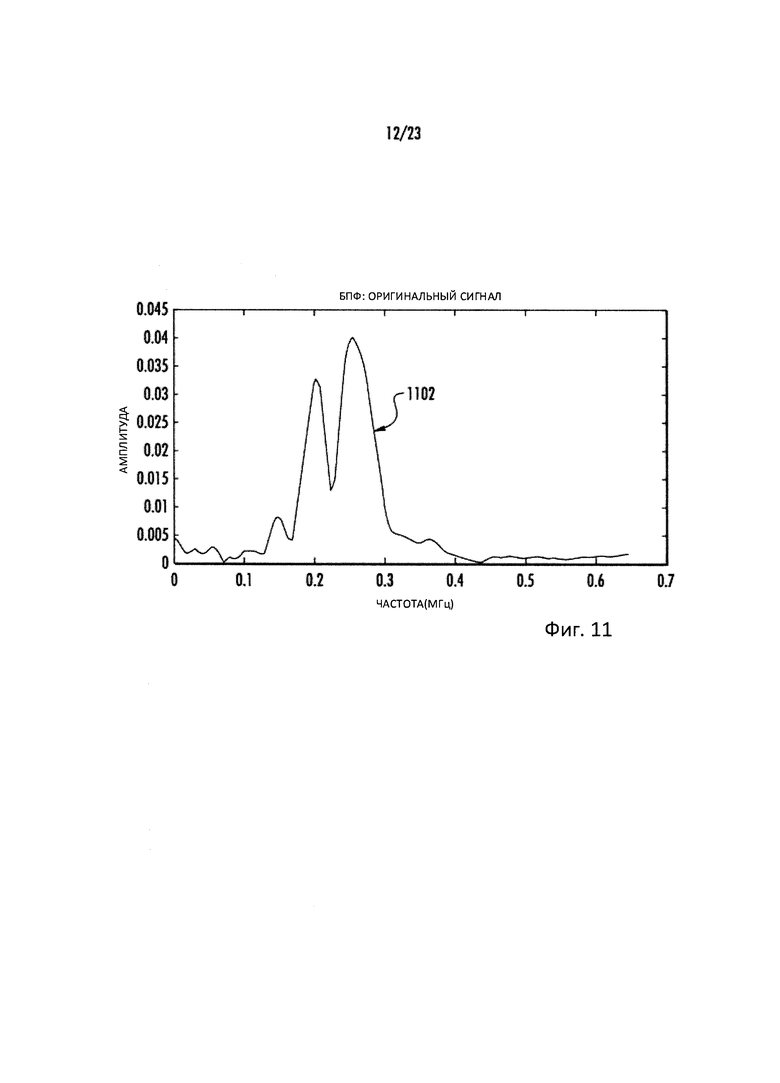
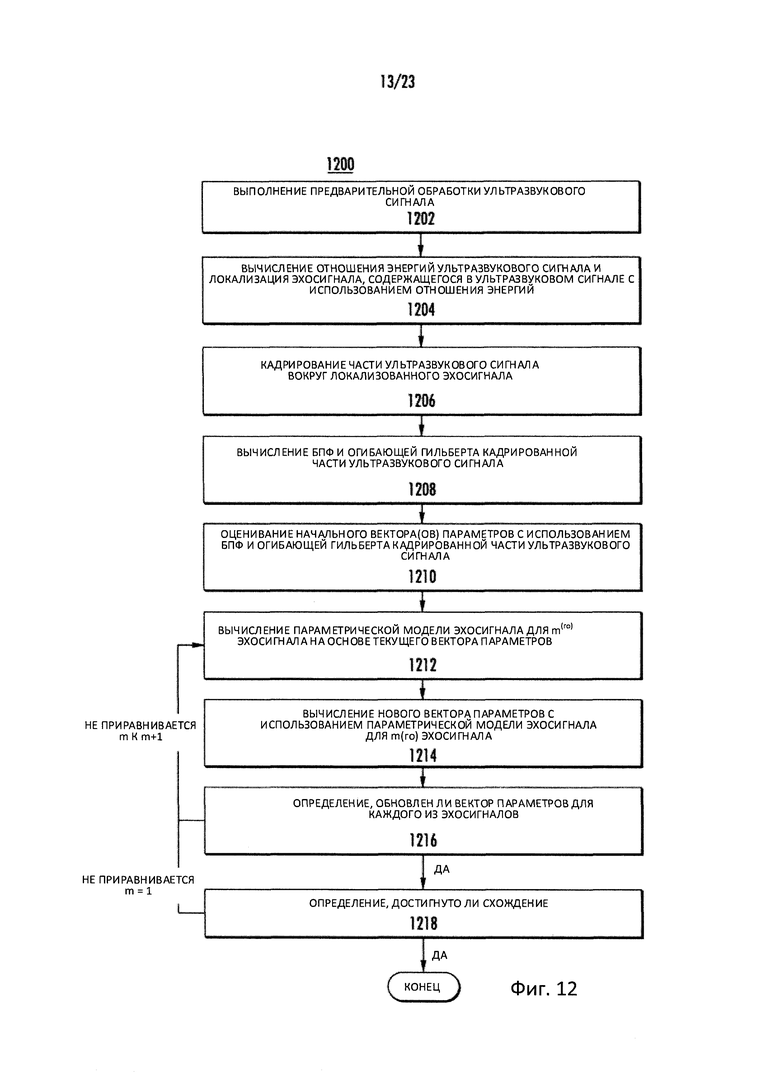
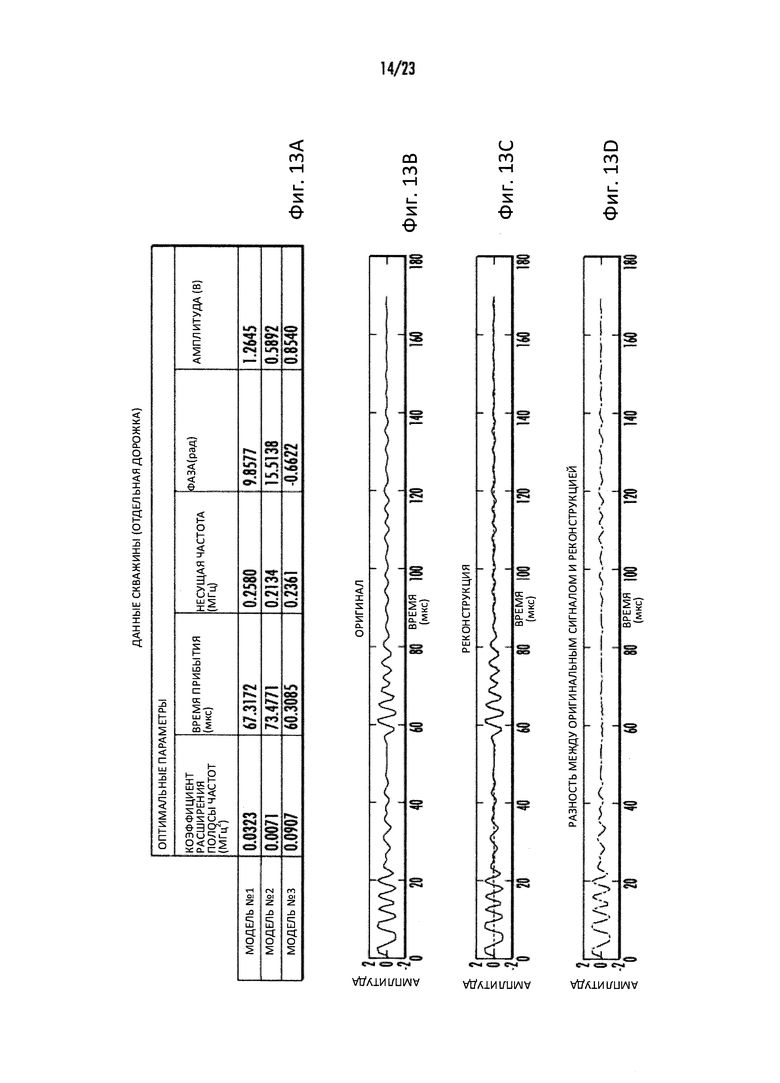
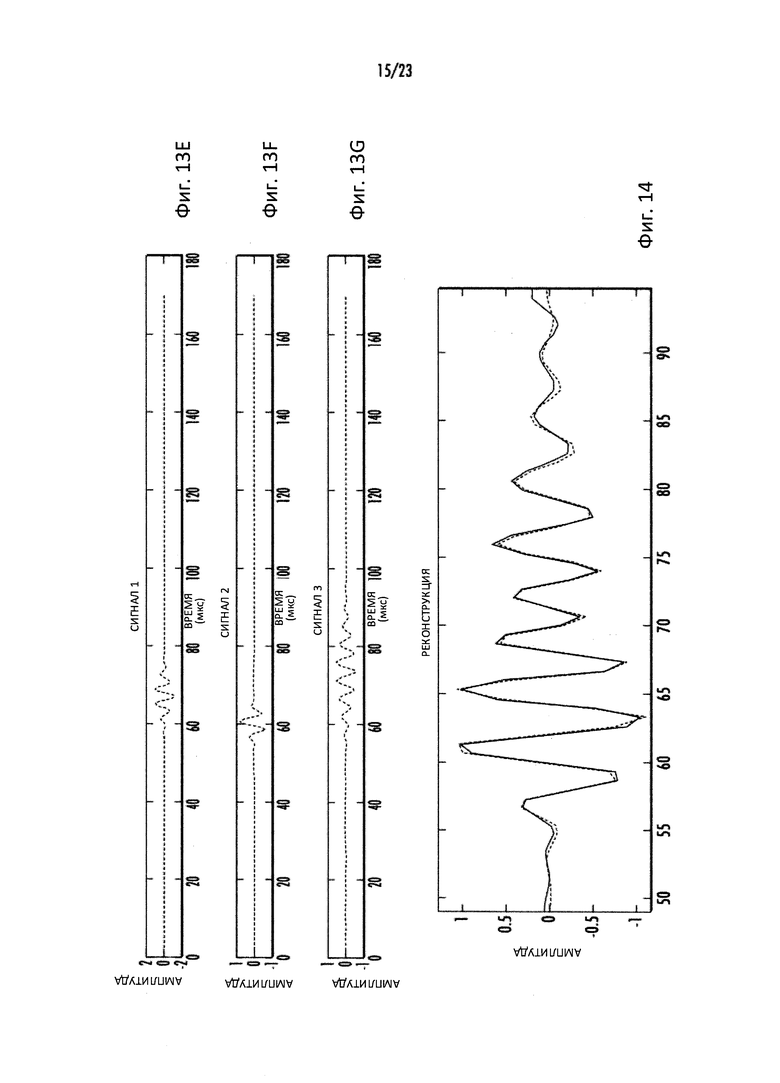
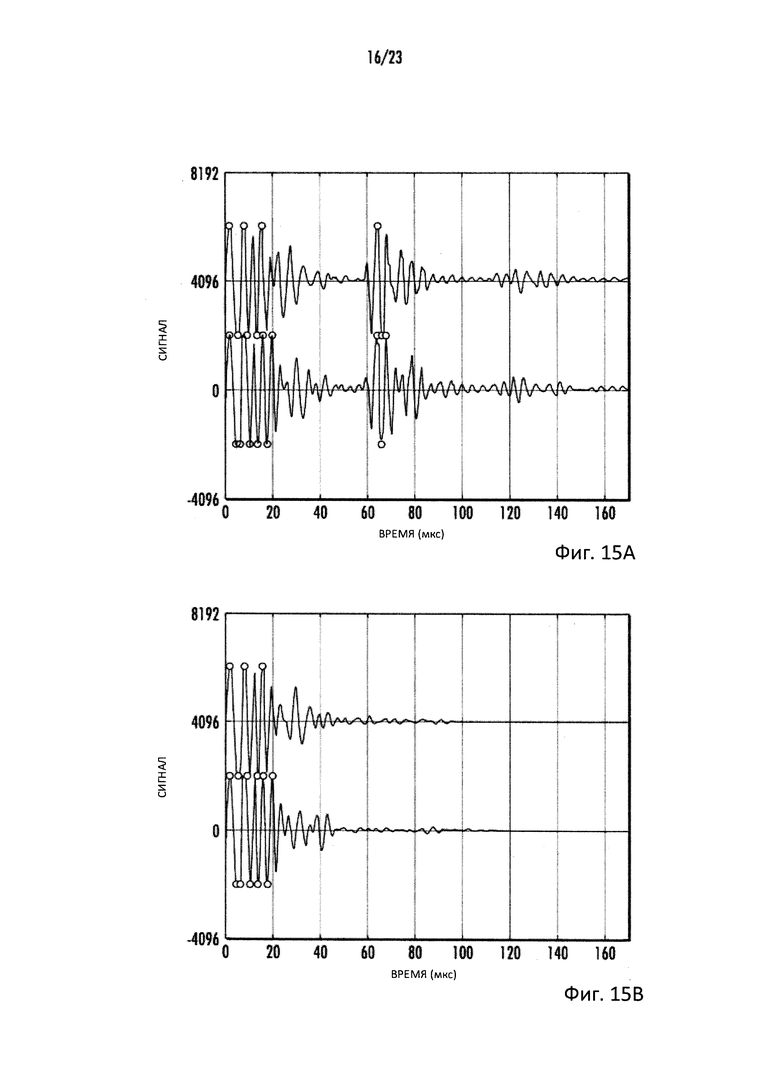
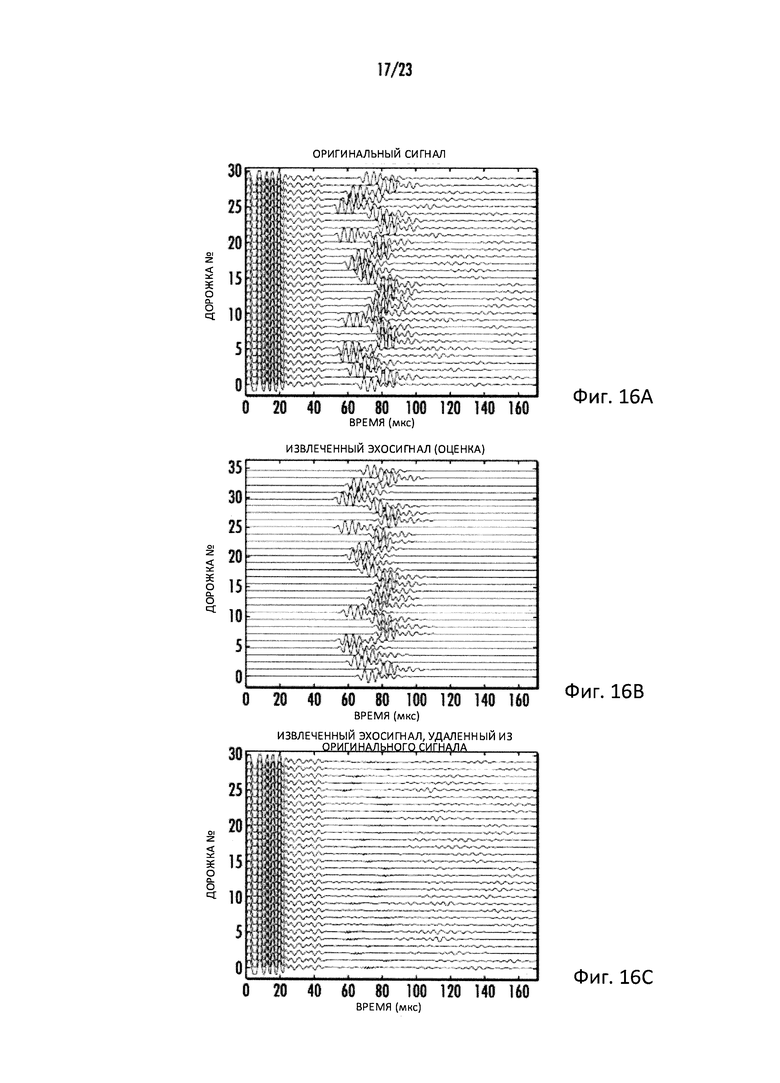
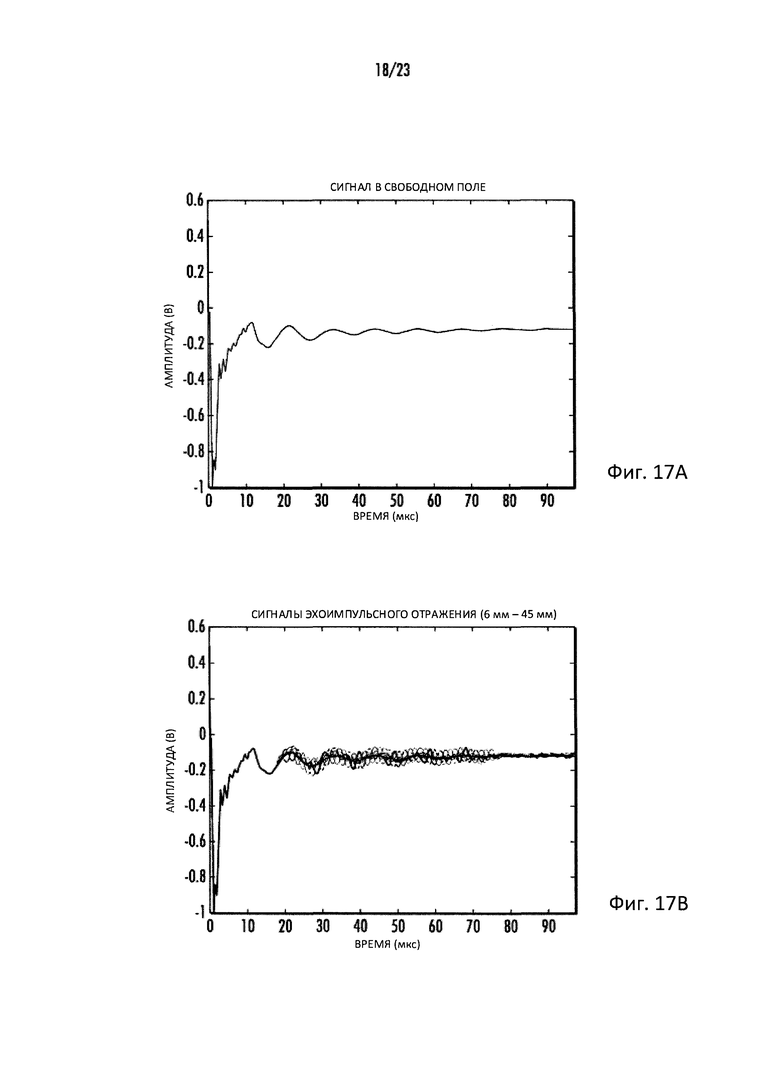
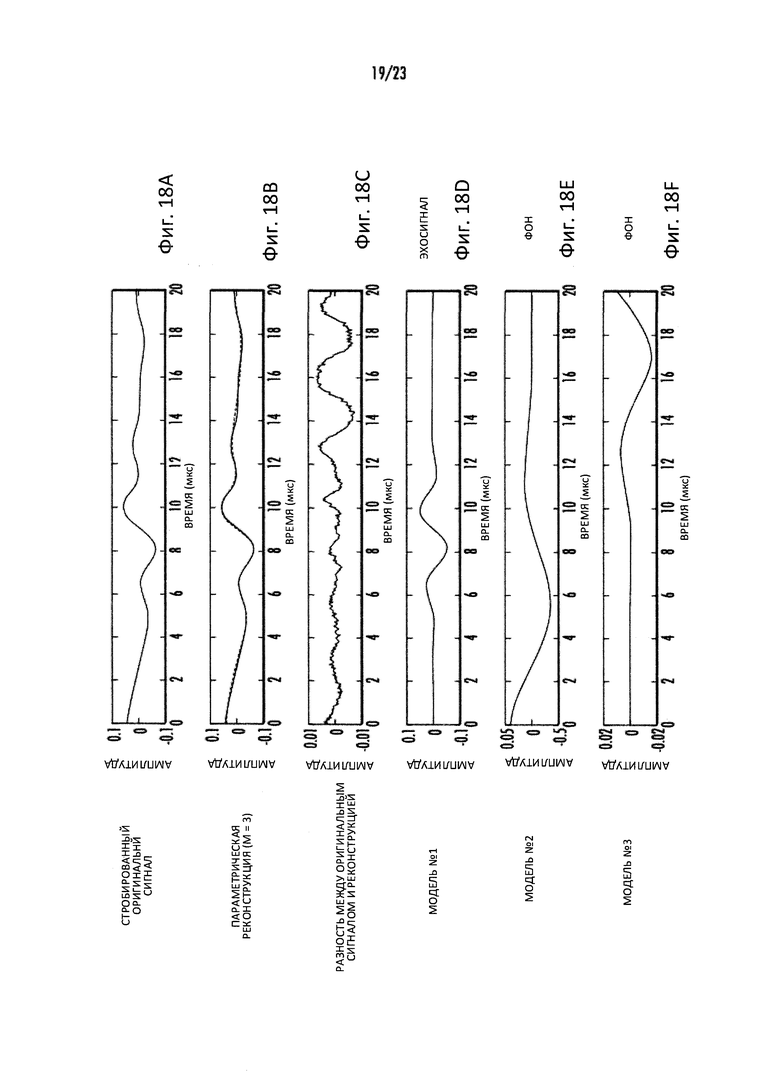
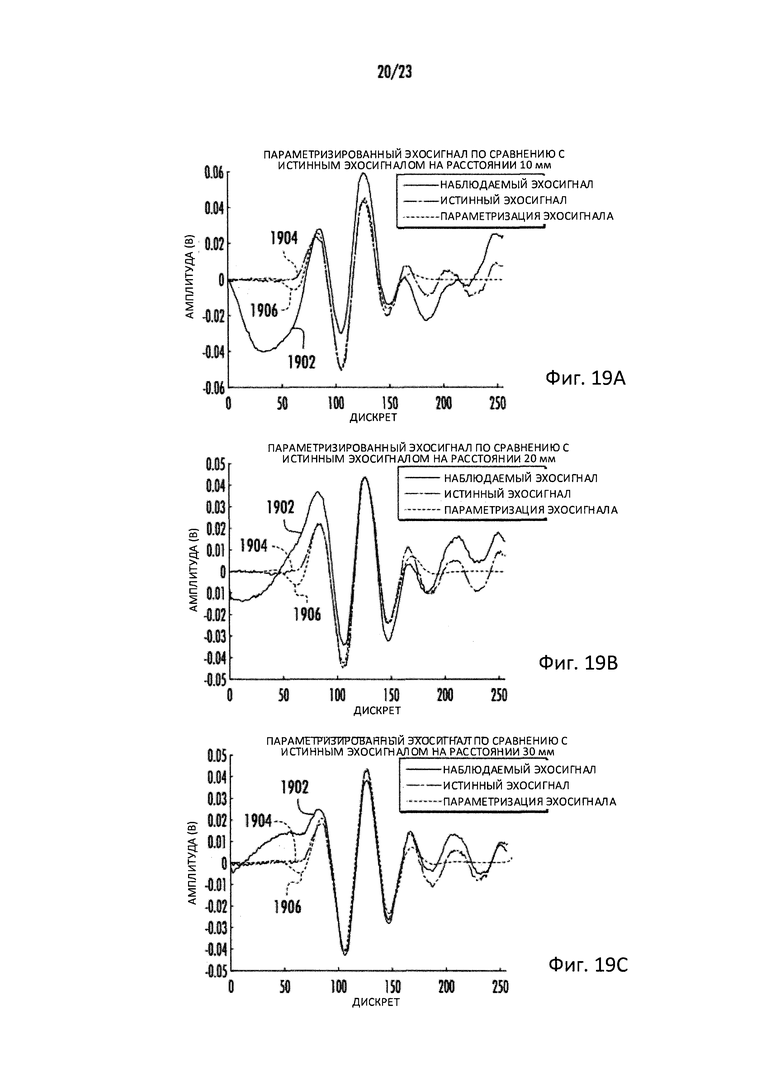
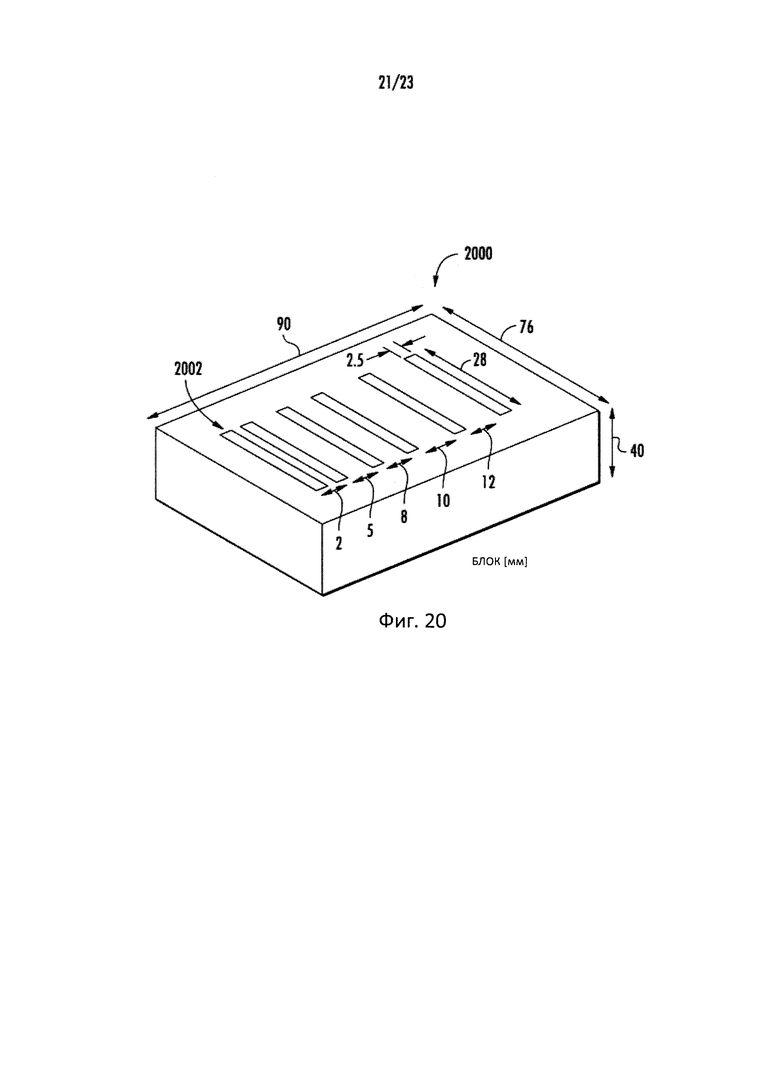
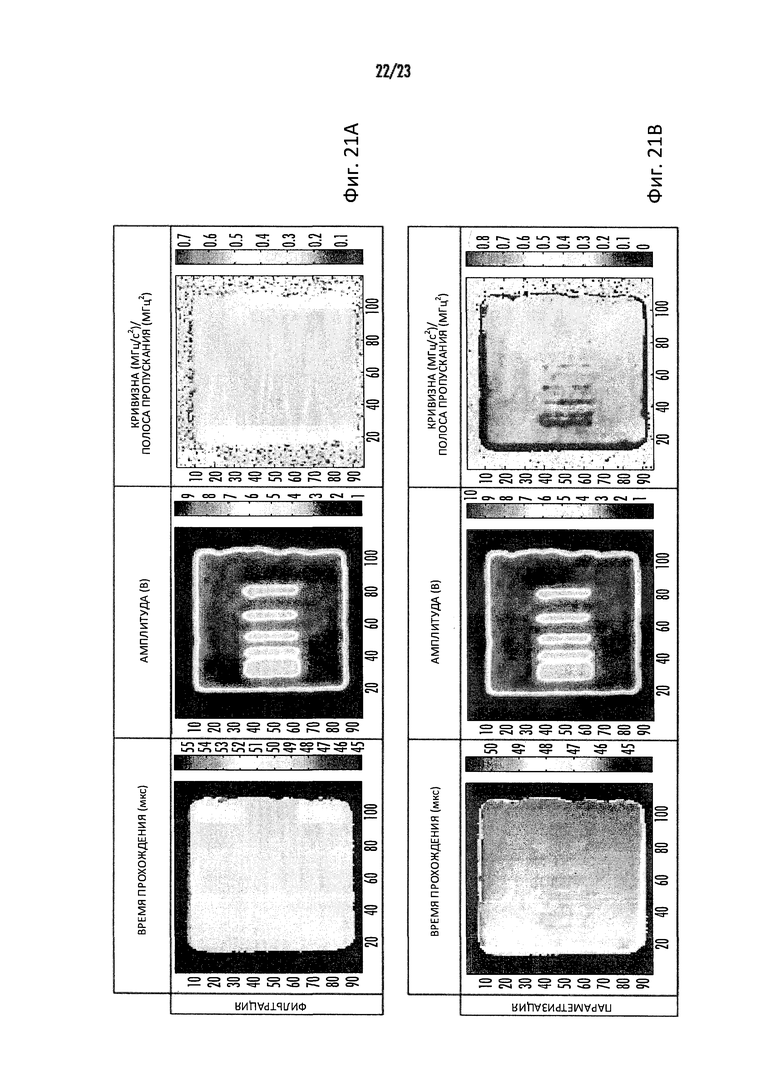
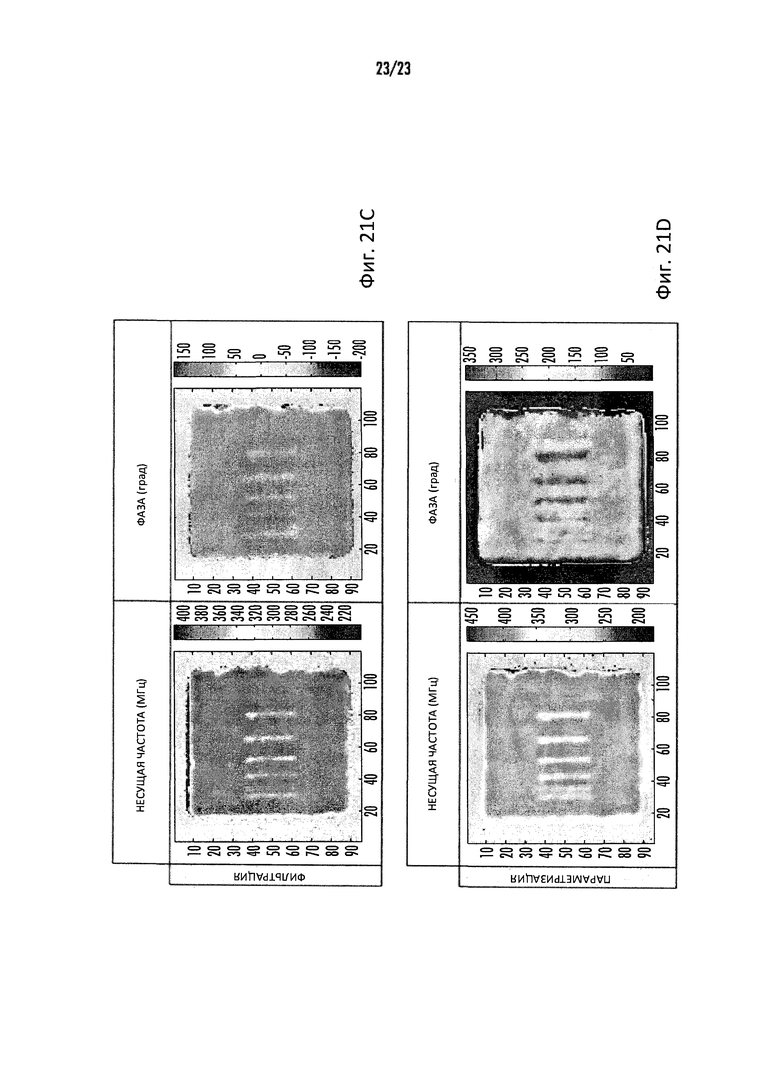
Использование: для автоматического получения характеристик эхо-сигнала, содержащегося в ультразвуковом сигнале. Сущность изобретения заключается в том, что выполняют следующие этапы: получение данных, соответствующих ультразвуковому сигналу, с помощью ультразвукового преобразователя; вычисление отношения энергий ультразвукового сигнала и локализацию эхо-сигнала, содержащегося в ультразвуковом сигнале, с использованием отношения энергий; кадрирование части ультразвукового сигнала вокруг локализованного эхо-сигнала; вычисление быстрого преобразования Фурье (БПФ) и огибающей Гильберта для кадрированной части ультразвукового сигнала; оценку M векторов параметров эхо-сигнала из БПФ и огибающей Гильберта для кадрированной части ультразвукового сигнала, при этом каждый из М векторов параметров эхо-сигнала включает множество параметров эхо-сигнала; вычисление M параметрических моделей эхо-сигнала на основе каждого из М векторов параметров эхо-сигнала; и итерационную минимизацию разности между кадрированной частью ультразвукового сигнала и суммой M параметрических моделей эхо-сигнала. Технический результат: обеспечение возможности получения более точных параметров эхо-сигнала в автоматическом режиме. 2 н. и 18 з.п. ф-лы, 54 ил.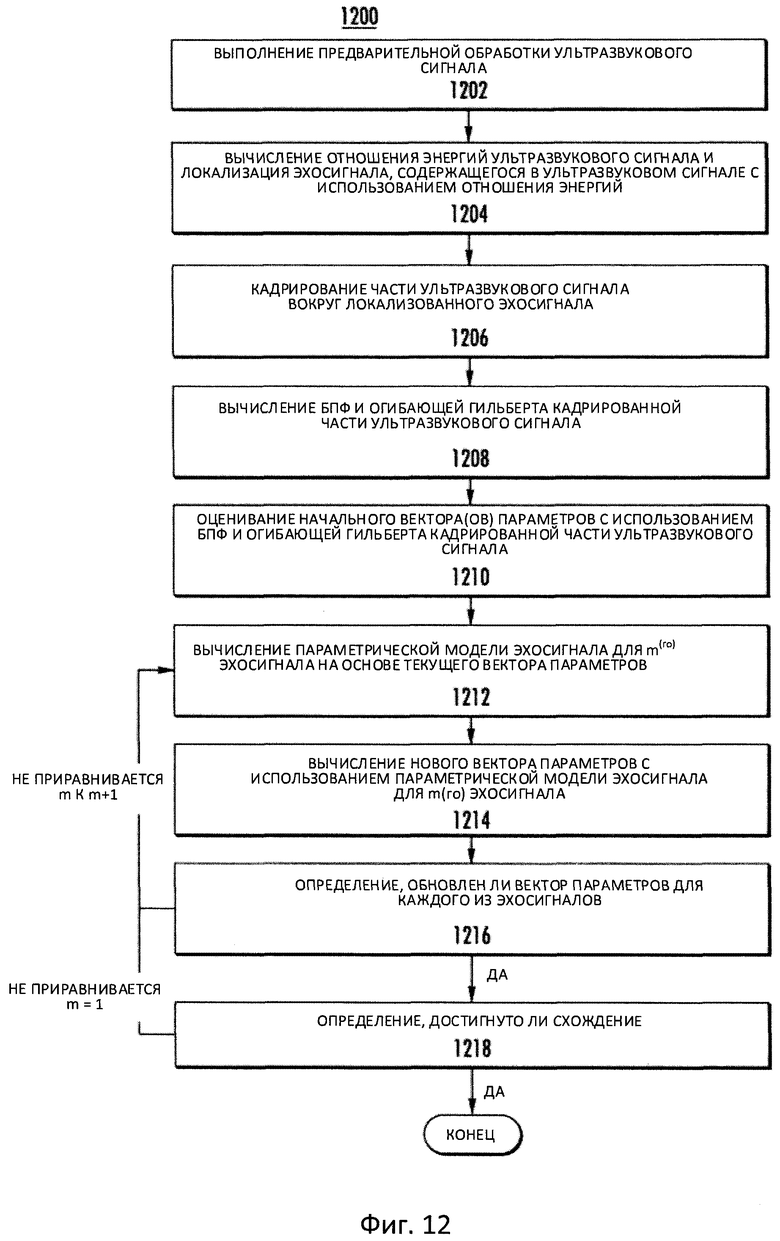
1. Способ для автоматического получения характеристик эхо-сигнала, содержащегося в ультразвуковом сигнале, причем ультразвуковой сигнал сгенерирован с помощью ультразвукового преобразователя, содержащий:
a. получение данных, соответствующих ультразвуковому сигналу, с помощью ультразвукового преобразователя;
b. вычисление отношения энергий ультразвукового сигнала и локализацию эхо-сигнала, содержащегося в ультразвуковом сигнале, с использованием отношения энергий;
c. кадрирование части ультразвукового сигнала вокруг локализованного эхо-сигнала;
d. вычисление быстрого преобразования Фурье (БПФ) и огибающей Гильберта для кадрированной части ультразвукового сигнала;
e. оценку M векторов параметров эхо-сигнала из БПФ и огибающей Гильберта для кадрированной части ультразвукового сигнала, при этом каждый из М векторов параметров эхо-сигнала включает множество параметров эхо-сигнала;
f. вычисление M параметрических моделей эхо-сигнала на основе каждого из М векторов параметров эхо-сигнала и
g. итерационную минимизацию разности между кадрированной частью ультразвукового сигнала и суммой M параметрических моделей эхо-сигнала.
2. Способ по п. 1, отличающийся тем, что вычисление отношения энергий ультразвукового сигнала и локализация эхо-сигнала, содержащегося в ультразвуковом сигнале, с использованием отношения энергий, содержащий:
b1. вычисление функции отношения энергий ультразвукового сигнала, при этом функцией отношения энергий является  , где Ex является энергией в заданной точке данных, a1 и a2 являются поправочными коэффициентами энергии, L является длиной кадра,
, где Ex является энергией в заданной точке данных, a1 и a2 являются поправочными коэффициентами энергии, L является длиной кадра,  является энергией сигнала,
является энергией сигнала,  является энергией шумов, и
является энергией шумов, и  является полной энергией и
является полной энергией и
b2. определение максимального значения функции отношения энергий ультразвукового сигнала, при этом максимальное значение соответствует приблизительному местоположению эхо-сигнала, содержащегося в ультразвуковом сигнале.
3. Способ по п. 2, отличающийся тем, что вычисление функции отношения энергий ультразвукового сигнала, содержащий:
b3. реверсирование данных, соответствующих ультразвуковому сигналу от вида «от головы к хвосту» к виду «от хвоста к голове»;
b4. вычисление функции отношения энергий реверсированного ультразвукового сигнала и
b5. определение максимального значения функции отношения энергий реверсированного ультразвукового сигнала, при этом максимальное значение функции отношения энергий ультразвукового сигнала соответствует левому разрыву первого эхо-сигнала, содержащегося в ультразвуковом сигнале, а максимальное значение функции отношения энергий реверсированного ультразвукового сигнала соответствует правому разрыву первого эхо-сигнала, содержащегося в ультразвуковом сигнале.
4. Способ по п. 2, отличающийся тем, что вычисление функции отношения энергий ультразвукового сигнала, содержащий:
b3. обрезку данных, соответствующих ультразвуковому сигналу;
b4. вычисление функции отношения энергий обрезанного ультразвукового сигнала и
b5. определение максимального значения функции отношения энергий обрезанного ультразвукового сигнала, при этом максимальное значение функции отношения энергий ультразвукового сигнала соответствует левому разрыву первого эхо-сигнала, содержащегося в ультразвуковом сигнале, а максимальное значение функции отношения энергий обрезанного ультразвукового сигнала соответствует левому разрыву второго эхо-сигнала, содержащегося в ультразвуковом сигнале.
5. Способ по п. 2, отличающийся тем, что длина кадра (L) приблизительно равна  , где s является настроечным коэффициентом, fc является несущей частотой ультразвукового сигнала, а fs является частотой дискретизации.
, где s является настроечным коэффициентом, fc является несущей частотой ультразвукового сигнала, а fs является частотой дискретизации.
6. Способ по п. 1, отличающийся тем, что кадрирование части ультразвукового сигнала вокруг локализованного эхо-сигнала включает применение коэффициента полуганнирования к данным, соответствующим одной или более частей ультразвукового сигнала за пределами кадрированной части ультразвукового сигнала вокруг локализованного эхо-сигнала.
7. Способ по п. 1, отличающийся тем, что итерационное минимизирование разности между кадрированной частью ультразвукового сигнала и суммой М параметрических моделей эхо-сигнала содержит выполнение по меньшей мере одного из оптимизации Гаусса-Ньютона (ГН), генетического алгоритма (ГА) и эволюционной оптимизации метаэвристического подхода.
8. Способ по п. 1, отличающийся тем, что вычисление М параметрических моделей эхо-сигнала содержит вычисление М параметрических моделей эхо-сигнала на основе каждого из М векторов параметров эхо-сигнала и кадрированной части ультразвукового сигнала и при этом итерационное минимизирование разницы между кадрированной частью ультразвукового сигнала и суммой M параметрических моделей эхо-сигнала, содержащий:
h. определение множества параметров эхо-сигнала для каждого из М векторов параметров эхо-сигнала на основе каждой из М параметрических моделей эхо-сигнала;
i. обновление М векторов параметров эхо-сигнала;
j. определение, сходятся ли обновленные М векторы параметров эхо-сигнала с М векторами параметров эхо-сигнала, и
k. если сходимость не достигнута, вычисление M параметрических моделей эхо-сигнала на основе каждого из обновленных М векторов параметров эхо-сигнала и кадрированной части ультразвукового сигнала и повторение этапов (h)-(k).
9. Способ по п. 1, отличающийся тем, что дополнительно содержит фильтрацию данных, соответствующих ультразвуковому сигналу, чтобы устранить по меньшей мере один фоновый компонент из ультразвукового сигнала.
10. Способ по п. 1, отличающийся тем, что множество параметров эхо-сигнала включает по меньшей мере один из: коэффициента расширения полосы частот (α), времени прибытия (τ), несущей частоты (fc), фазы (ϕ), амплитуды (β) и их комбинаций.
11. Способ по п. 10, отличающийся тем, что дополнительно содержит создание изображения с использованием множества параметров эхо-сигнала.
12. Система для автоматического получения характеристик эхо-сигнала, содержащегося в ультразвуковом сигнале, содержащая:
ультразвуковой преобразователь, выполненный с возможностью генерирования и приема ультразвукового сигнала, и
блок управления, содержащий по меньшей мере один процессор и память, при этом блок управления выполнен с возможностью:
a. получения данных, соответствующих ультразвуковому сигналу, от ультразвукового преобразователя;
b. вычисления отношения энергий ультразвукового сигнала и локализации эхо-сигнала, содержащегося в ультразвуковом сигнале, с использованием отношения энергий;
c. кадрирования части ультразвукового сигнала вокруг локализованного эхо-сигнала;
d. вычисления быстрого преобразования Фурье (БПФ) и огибающей Гильберта для кадрированной части ультразвукового сигнала;
e. оценки М векторов параметров эхо-сигнала из БПФ и огибающей Гильберта для кадрированной части ультразвукового сигнала, при этом каждый из М векторов параметров эхо-сигнала включает множество параметров эхо-сигнала;
f. вычисления М параметрических моделей эхо-сигнала на основе каждого из М векторов параметров эхо-сигнала;
g. итерационного минимизирования разности между кадрированной частью ультразвукового сигнала и суммой М параметрических моделей эхо-сигнала.
13. Система по п. 12, отличающаяся тем, что блок управления выполнен с возможностью вычисления отношения энергий ультразвукового сигнала и локализации эхо-сигнала, содержащегося в ультразвуковом сигнале, с использованием отношения энергий путем:
b1. вычисления функции отношения энергий ультразвукового сигнала, при этом функцией отношения энергий является , где Ex является энергией в заданной точке данных, a1 и a2 являются поправочными коэффициентами энергии, L является длиной кадра, является энергией сигнала, является энергией шумов и является полной энергией; и
b2. определения максимального значения функции отношения энергий ультразвукового сигнала, при этом максимальное значение соответствует приблизительному местоположению эхо-сигнала, содержащегося в ультразвуковом сигнале.
14. Система по п. 13, отличающаяся тем, что блок управления выполнен с возможностью вычисления функции отношения энергий ультразвукового сигнала путем:
b3. реверсирования данных, соответствующих ультразвуковому сигналу от вида «от головы к хвосту» к виду «от хвоста к голове»;
b4. вычисления функции отношения энергий реверсированного ультразвукового сигнала и
b5. определения максимального значения функции отношения энергий реверсированного ультразвукового сигнала, при этом максимальное значение функции отношения энергий ультразвукового сигнала соответствует левому разрыву первого эхо-сигнала, содержащегося в ультразвуковом сигнале, а максимальное значение функции отношения энергий реверсированного ультразвукового сигнала соответствует правому разрыву первого эхо-сигнала, содержащегося в ультразвуковом сигнале.
15. Система по п. 13, отличающаяся тем, что блок управления выполнен с возможностью вычисления функции отношения энергий ультразвукового сигнала путем:
b3. обрезки данных, соответствующих ультразвуковому сигналу;
b4. вычисления функции отношения энергий обрезанного ультразвукового сигнала и
b5. определения максимального значения функции отношения энергий обрезанного ультразвукового сигнала, при этом максимальное значение функции отношения энергий ультразвукового сигнала соответствует левому разрыву первого эхо-сигнала, содержащегося в ультразвуковом сигнале, а максимальное значение функции отношения энергий обрезанного ультразвукового сигнала соответствует левому разрыву второго эхо-сигнала, содержащегося в ультразвуковом сигнале.
16. Система по п. 12, отличающаяся тем, что блок управления выполнен с возможностью кадрирования части ультразвукового сигнала вокруг локализованного эхо-сигнала путем применения коэффициента полуганнирования к данным, соответствующим одной или более частей ультразвукового сигнала за пределами кадрированной части ультразвукового сигнала вокруг локализованного эхо-сигнала.
17. Система по п. 12, отличающаяся тем, что блок управления выполнен с возможностью итерационного минимизирования разности между кадрированной частью ультразвукового сигнала и суммой М параметрических моделей эхо-сигнала путем выполнения по меньшей мере одного из оптимизации Гаусса-Ньютона (ГН), генетического алгоритма (ГА) и эволюционной оптимизации метаэвристического подхода.
18. Система по п. 12, отличающаяся тем, что блок управления выполнен с возможностью вычисления М параметрических моделей эхо-сигнала путем вычисления М параметрических моделей эхо-сигнала на основе каждого из М векторов параметров эхо-сигнала и кадрированной части ультразвукового сигнала, и при этом блок управления выполнен с возможностью итерационного минимизирования разницы между кадрированной частью ультразвукового сигнала и суммой M параметрических моделей эхо-сигнала путем:
h. определения множества параметров эхо-сигнала для каждого из М векторов параметров эхо-сигнала на основе каждой из М параметрических моделей эхо-сигнала;
i. обновления М векторов параметров эхо-сигнала;
j. определения, сходятся ли обновленные М векторы параметров эхо-сигнала с М векторами параметров эхо-сигнала, и
k. если сходимость не достигнута, вычисления M параметрических моделей эхо-сигнала на основе каждого из обновленных М векторов параметров эхо-сигнала и кадрированной части ультразвукового сигнала и повторения этапов (h)-(k).
19. Система по п. 12, отличающаяся тем, что множество параметров эхо-сигнала включает по меньшей мере один из: коэффициента расширения полосы частот (α), времени прибытия (τ), несущей частоты (fc), фазы (ϕ), амплитуды (β) и их комбинаций.
20. Система по п. 19, отличающаяся тем, что блок управления дополнительно выполнен с возможностью создания изображения с использованием множества параметров эхо-сигнала.
| Способ распознавания характера дефектов при ультразвуковом контроле изделий | 1979 |
|
SU1061709A3 |
| Листоприемное устройство | 1959 |
|
SU123163A1 |
| KR 20090121739A, 26.11.2009 | |||
| CN 101109732A, 23.01.2008 | |||
| JP 2009168518A, 30.07.2009. | |||

