Изобретение относится к области радионавигации в условиях отсутствия визуальной видимости взлетно-посадочной полосы (ВПП) и в сложных метеорологических условиях. Изобретение предназначено для определения положения средней линии ВПП с помощью бортовой радиолокационной станции (РЛС).
При малых углах облучения местности принимаемая бортовой РЛС мощность сигналов, отраженных от элементов поверхности ВПП, в силу зеркального отражения, очень мала и находится на уровне собственных шумов приемника, а мощность сигналов, отраженных от поверхности, окружающей ВПП во много раз больше. Это различие мощностей отраженных сигналов позволяет сформировать радиолокационное изображение (РЛИ) ВПП на экране бортового индикатора в заданном масштабе и системе координат «азимут-дальность» или «азимут-угол места».
Таким образом, при сравнении сигналов, отраженных от ВПП и окружающей ее местности, с пороговым значением, обеспечивается возможность обнаружить переднюю, заднюю, левую и правую кромки ВПП, определить их координаты, на основании полученных координат вычислить координаты средней линии ВПП и сформировать осевую (среднюю) линию ВПП.
При подлете с боковым уклонением более половины ширины ВПП ее РЛИ имеет вид «изогнутой ленты», искривление которой определяется величиной бокового уклонения от оси ВПП. При этом средняя линия РЛИ ВПП также будет наблюдаться в виде криволинейной линии.
Как показали летные испытания, криволинейное изображение средней линии ВПП затрудняет определение бокового уклонения летательного аппарата (ЛА) от курса посадки.
В качестве прототипа принимаем способ определения положения средней линии ВПП, изложенный в патенте №1804629, который включает прием электромагнитных сигналов от элементов поверхности ВПП и оценку их интенсивности; среднюю линию ВПП определяют как биометрическое место точек, равноудаленных от боковых кромок ВПП.
Недостатком данного способа является то, что средняя линия ВПП может быть криволинейной, а это затрудняет точность посадки ЛА.
Целью изобретения является формирование прямолинейной средней линии ВПП в случае ее криволинейного изображения при боковом уклонении ЛА от оси ВПП. Формирование прямолинейной средней линии обеспечивает повышение точности посадки ЛА.
Еще одной целью является снижение нагрузки пилота.
Поставленная цель достигается тем, что в радиолокационном способе определения положения средней линии взлетно-посадочной полосы, включающем прием электромагнитных сигналов от элементов поверхности взлетно-посадочной полосы и местности, окружающей взлетно-посадочную полосу, оценку их интенсивности и формирование изображения взлетно-посадочной полосы в случае криволинейного изображения взлетно-посадочной полосы, в средней части радиолокационного изображения взлетно-посадочной полосы определяют координаты геометрического места точки, равноудаленной от боковых кромок, эту точку соединяют со средними точками, расположенными на передней и задней кромках взлетно-посадочной полосы, при этом формируют среднюю линию, состоящую из 2-х прямолинейных отрезков, расположенных под углом друг к другу.
Для еще большего повышения точности посадки, при сильном боковом уклонении возможно в средней части радиолокационного изображения взлетно-посадочной полосы определить дополнительно еще одну точку, равноудаленную от боковых кромок, и сформировать среднюю линию, состоящую из трех прямолинейных отрезков, расположенных под углом друг к другу.
Целесообразно среднюю линию РЛИ ВПП отображать на индикаторе цветом, отличным от изображения ВПП и местности, ее окружающей.
При использовании указанных признаков способа достигается повышение точности, автономного контроля посадки, в том числе при боковом уклонении ЛА при посадке и в условиях отсутствия визуальной видимости ВПП, в частности в сложных метеорологических условиях.
Кроме этого, снижается нагрузка пилота при посадке ЛА. Из известного уровня техники не выявлены решения, имеющие признаки, совпадающие с отличительными признаками предлагаемого технического решения. Поэтому можно считать, что заявляемое изобретение соответствует условиям новизны.
При полете ЛА по посадочной траектории с помощью бортовой РЛС небольшого радиуса действия с высокой угловой разрешающей способностью осуществляют радиолокационный обзор земной поверхности в переднем секторе, симметричном относительно проекции вектора путевой скорости (т.е. с компенсацией угла сноса). Радиолокационная информация, представляющая собой эхо-сигналы от ВПП, и окружающей ее местности, запоминается в виде кадра РЛИ местности, формируемого в пределах сектора сканирования луча антенны в азимутальной плоскости. При построчном считывании сигналов вдоль азимутальной координаты осуществляют сравнение амплитуды считанного сигнала с пороговым значением, для обнаружения кромок РЛИ ВПП. Для повышения вероятности правильного обнаружения кромок ВПП можно использовать статистический критерий последовательного обнаружения. В случае криволинейного контура РЛИ ВПП определяют координаты геометрического места средних точек, расположенных на передней и задней кромках РЛИ ВПП, а также точку, равноудаленную от боковых кромок в средней части РЛИ ВПП и формируют среднюю линию путем соединения вычисленных трех точек - на передней, задней кромках РЛИ ВПП и в средней ее части. Эта сформированная средняя линия представляет собой линию, состоящую из двух прямолинейных отрезков, расположенных под углом друг к другу.
Для еще большего увеличения точности посадки возможно построение средней лини ВПП, состоящей из трех прямолинейных отрезков, для чего в средней части РЛИ ВПП определяют дополнительно еще одну точку, равноудаленную от боковых кромок, и соединяют точки в средней части между собой и со средними точками на передней и задней кромках РЛИ ВПП. При этом рекомендуемые расстояния могут быть, например 0-300 м, 300-600 м, 600-900 м.
Если строить среднюю линию из четырех и более прямолинейных отрезков, то это приведет к неоправданному увеличению времени определения средней линии.
Сформированная средняя линия ВПП отображается на экране бортового индикатора или на лобовом стекле ЛА, при этом ее отображение выделяется цветом, отличным от изображения ВПП и местности ее окружающей.
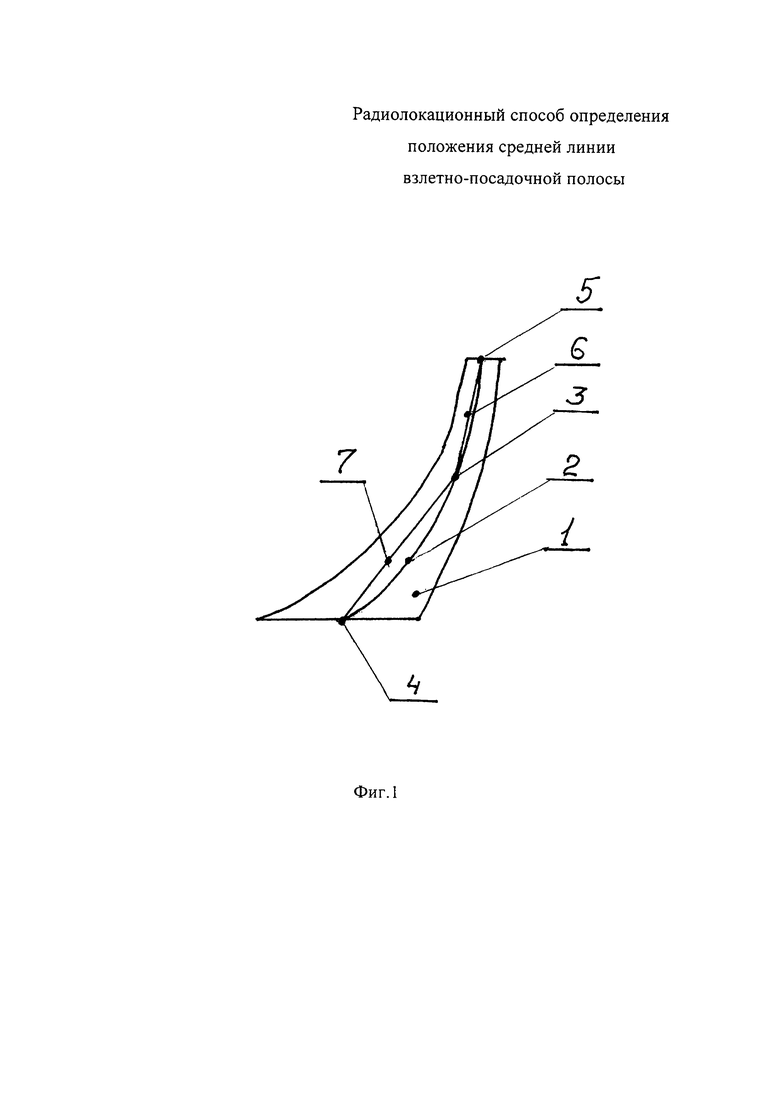
Изобретение поясняется чертежом, где на фиг. 1 представлено РЛИ ВПП. Высота ЛА 50 м.
При полете с боковым уклонением от оси ВПП 1 последняя имеет вид «изогнутой ленты», и средняя ее линия 2 будет криволинейной. В средней части РЛИ ВПП определяют точку 3, равноудаленную от боковых кромок. Точки 4 и 5 - средние точки на передней и задней (соответственно) кромках ВПП. Соединяя точку 3 с точками 4 и 5, формируют среднюю линию, состоящую из двух прямолинейных отрезков 6 и 7, расположенных под углом друг к другу.
Предложенный способ позволяет формировать среднюю прямолинейную линию ВПП автономно, непосредственно на борту ЛА, без использования наземного оборудования (маяков, отражателей, специального кабеля и т.д.). При этом сокращаются затраты на приобретение, монтаж наземного оборудования и эксплуатационное обслуживание. Возможность формирования средней линии ВПП в виде прямолинейной линии позволяет значительно повысить точность контроля посадки и, следовательно, безопасность, снизить нагрузку на пилота, а также способствует обеспечению регулярности полетов.
Изобретение относится к области радионавигации в условиях отсутствия визуальной видимости взлетно-посадочной полосы (ВПП) и в сложных метеорологических условиях и может быть использовано для определения положения средней линии ВПП с помощью бортовой радиолокационной станции (РЛС), без использования наземного оборудования. Достигаемый технический результат - повышение точности посадки ЛА. Указанный результат достигается за счет того, что осуществляют прием электромагнитных сигналов от элементов поверхности ВПП и местности, ее окружающей, оценку их интенсивности и формирование изображения ВПП, при этом, в случае криволинейного изображения взлетно-посадочной полосы, в средней части радиолокационного изображения ВПП определяют координаты геометрического места точки, равноудаленной от боковых кромок, эту точку соединяют со средними точками, расположенными на передней и задней кромках ВПП, при этом формируют среднюю линию, состоящую из 2-х прямолинейных отрезков, расположенных под углом друг к другу, при сильном боковом уклонении в средней части радиолокационного изображения ВПП дополнительно определяют еще одну точку, равноудаленную от боковых кромок, и формируют среднюю линию, состоящую из трех прямолинейных отрезков, расположенных под углом друг к другу. Целесообразно среднюю линию радиолокационного изображения ВПП отображать на индикаторе цветом, отличным от изображения ВПП и местности, ее окружающей. 2 з.п. ф-лы, 1 ил.
1. Радиолокационный способ определения положения средней линии взлетно-посадочной полосы, включающий прием электромагнитных сигналов от элементов поверхности взлетно-посадочной полосы и местности, окружающей взлетно-посадочную полосу, оценку их интенсивности и формирование изображения взлетно-посадочной полосы, отличающийся тем, что в случае криволинейного изображения взлетно-посадочной полосы, в средней части радиолокационного изображения взлетно-посадочной полосы определяют координаты геометрического места точки, равноудаленной от боковых кромок, эту точку соединяют со средними точками, расположенными на передней и задней кромках взлетно-посадочной полосы, при этом формируют среднюю линию, состоящую из 2-х прямолинейных отрезков, расположенных под углом друг к другу.
2. Способ по п. 1, отличающийся тем, что в средней части радиолокационного изображения взлетно-посадочной полосы определяют дополнительно еще одну точку, равноудаленную от боковых кромок, и формируют среднюю линию, состоящую из трех прямолинейных отрезков, расположенных под углом друг к другу.
3. Способ по п. 1 или 2, отличающийся тем, что среднюю линию радиолокационного изображения взлетно-посадочной полосы отображают на индикаторе цветом, отличным от изображения взлетно-посадочной полосы и местности ее окружающей.
| Способ определения положения осевой линии взлетно-посадочной полосы | 1991 |
|
SU1804629A3 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ | 2009 |
|
RU2410753C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СОСТОЯНИЯ ПОВЕРХНОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ПРИ ДВИЖЕНИИ ВОЗДУШНОГО СУДНА НА ЭТАПЕ ПРОБЕГА ПОСЛЕ ПОСАДКИ | 2009 |
|
RU2405721C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСОЙ И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2008 |
|
RU2523167C2 |
| US 6952632 B2, 04.10.2005 | |||
| WO 2010020751 A2, 25.02.2010 | |||
| US 4490802 A, 25.12.1984. | |||

