Изобретение относится к области радионавигации и предназначается для контроля снижения воздушного судна (ВС) до точки выравнивания при посадке в условиях отсутствия визуальной видимости взлетно-посадочной полосы (ВПП).
В настоящее время современная авиация подошла к рубежам, когда существующие бортовые и наземные информационные средства уже не в состоянии обеспечивать требуемый уровень безопасности ручной посадки в сложных метеорологических условиях, соответствующих IIой, IIΙΑ, IIΙΒ, IIIС категориям метеоминимума ICAO. Самолеты будущего должны удовлетворять все возрастающему количеству летных эксплуатационных и экономических требований, в том числе требованию посадки в любых метеоусловиях. Удовлетворение этих подчас противоречивых требований приводит к необходимости новых концепций проектирования самолета и его оборудования.
Анализируя сложности и недостатки, объективно существующие при выполнении посадки в сложных метеорологических условиях (СМУ), становится очевидным, что без их устранения невозможно в настоящее время существенное повышение безопасности и регулярности полетов. Среди специалистов существует мнение, что возможности совершенствования существующих наземных инструментальных систем посадки практически исчерпаны, и прогресс в области обеспечения безопасности посадки самолета может быть достигнут только при комплексном использовании их с дополнительной автономной системой, построенной на новых принципах.
Одним из наиболее эффективных методов, позволяющих устранять перечисленные недостатки процесса посадки, является использование дополнительного независимого канала информации. В качестве такого канала служит специальная бортовая радиолокационная станция (БРЛС) небольшого радиуса действия с высокой разрешающей способностью. БРЛС осуществляет картографирование ВПП при заходе на посадку и в процессе полета по посадочной траектории в условиях отсутствия визуальной видимости ВПП, в том числе в СМУ. БРЛС обеспечивает визуализацию с помощью системы электронной индикации или индикатора на лобовом стекле, т.е. радиолокационное изображение (РЛИ) взлетно-посадочной полосы в режиме посадки без использования наземного посадочного оборудования.
Посадочная траектория, а именно снижение по глиссаде, выполняется с удаления от 8 до 24 км от ВПП. Радиолокационное изображение ВПП при различных внешних условиях возможно наблюдать на индикаторе с дальности 7-10 км.
При выполнении посадки в условиях отсутствия визуальной видимости (в дыму или в сложных метеорологических условиях (СМУ), например, соответствующих II категории метеоминимума ICAO, это время составляет 6-10 с, а запас по высоте составляет 30 м. Когда дефицит времени становится особенно острым, пилот не может достаточно объективно оценивать полученную информацию, вследствие чего повышается вероятность несвоевременного принятия решения об уходе на второй круг (для принятия решения пилоту ограничен лимит времени от 2-х до 6 с). Известные способы контроля посадки ВС, например R4 2086471 С1; 6 В64С13/20 «Система посадки» или R4 2100, 2820С МПК G01S 1/16, 1/18, 3/02 «Прецезионная система посадки», не являются автономными, т.к. включают в свой состав наземное (аэродромное) оборудование. Известен «Способ выполнения снижения при заходе на посадку» по патенту R 2002134798, однако он не предусматривает корректировку отклонений от посадочной траектории в горизонтальной плоскости (по курсу). Наиболее близкими по технической сущности являются «Способ контроля и корректировка глиссады ВС относительно точки приземления», изложенный в патенте 1804628 от 24.10.1991. Данный способ также не предусматривает корректировку отклонений от посадочной траектории в горизонтальной плоскости (по курсу), при этом способе для корректировки глиссады (в вертикальной плоскости) проводят измерение наклонных дальностей до точки начала выравнивания.
Цель предлагаемого изобретения
Целью изобретения является повышение точности контроля снижения и уменьшение времени оценки отклонения ВС от посадочной траектории по курсу и глиссаде, что снижает психологическое напряжение пилота при выполнении контроля посадки в условиях отсутствия визуальной видимости и в СМУ, т.к. пилот может, наблюдая отметки на индикаторе БРЛС, одновременно оценивать направление отклонения от посадочной траектории в горизонтальной плоскости (по курсу) и в вертикальной плоскости (по глиссаде), а также степень отклонения, что необходимо для формирования решения о том, является заход посадочным или непосадочным.
Цель достигается тем, что при радиолокационном способе контроля снижения при посадке ВС в условиях отсутствия визуальной видимости ВПП, определяют с помощью бортовой радиолокационной станции боковое отклонение от посадочной траектории в горизонтальной плоскости по асимметрии радиолокационного изображения ВПП, корректируют курс посадочной траектории, для чего совмещают отметку вектора путевой скорости с прямолинейной отметкой средней линии симметричного радиолокационного изображения взлетно-посадочной полосы; контроль посадочной траектории в вертикальной плоскости осуществляют при полете на прямолинейном участке посадочной траектории после обнаружения бортовой радиолокационной станцией переднего торца взлетно-посадочной полосы, для чего измеряют с помощью бортовой радиолокационной станции наклонную дальность до торца взлетно-посадочной полосы, совпадающую с точкой начала выравнивания, вычисляют горизонтальную дальность до торца взлетно-посадочной полосы в соответствии с выражением (1), вычисляют горизонтальную составляющую глиссадной дальности при полете по заданной глиссаде до точки выравнивания в соответствии с выражением (2) и осуществляют полет по заданной глиссаде, для чего пилот управляет воздушным судном в вертикальной плоскости таким образом, чтобы выполнялось равенство горизонтальной дальности до торца взлетно-посадочной полосы и горизонтальной составляющей глиссадной дальности при полете по заданной глиссаде до точки выравнивания, т.е. при Д4=Д2

где Д3 - наклонная дальность до торца взлетно-посадочной полосы,
Д4 - горизонтальная дальность до торца взлетно-посадочной полосы,
Η - высота полета;
где Д2 - горизонтальная составляющая глиссадной дальности при полете по заданной глиссаде до точки выравнивания;
α - угол заданной глиссады
При необходимости посадки в область, удаленную от торца взлетно-посадочной полосы, формируют на индикаторе специальную отметку, которая фиксирует расстояние от торца взлетно-посадочной полосы и является составной частью горизонтальной дальности до точки выравнивания в соответствии с выражением (3), обеспечивающей посадку в заданной области взлетно-посадочной полосы.
Д5=Д4+ΔД, (3)
где Д5 - горизонтальная дальность до точки выравнивания,
ΔД - расстояние от торца взлетно-посадочной полосы до точки выравнивания.
Заявляемое техническое решение предусматривает целесообразность окраски сформированных отметок в различные цвета, что также повышает точность контроля посадки ВС в условиях отсутствия визуальной видимости ВПП. В заявляемом способе предлагается использование горизонтальной дальности до точки выравнивания, что дает возможность более точной оценки дальности от торца ВПП до точки начала выравнивания. Это необходимо для выполнения контроля параметров с максимальной точностью, что необходимо, например, при посадке на участок ВПП, удаленный от передней кромки (торца ВПП), например, для предупреждения столкновения с препятствиями при посадке (когда у торца ВПП появились препятствия, например, снегоочиститель, автомобиль), либо передняя часть ВПП получила повреждения.
Для посадки в область, удаленную от торца ВПП, формируют на индикаторе специальную отметку, которая фиксирует расстояние от торца ВПП и является составной частью горизонтальной дальности до точки выравнивания.
Д5=Д4+ΔД,
где Д5 - точка выравнивания,
Д4 - горизонтальная дальность до торца взлетно-посадочной полосы,
ΔД - расстояние от торца взлетно-посадочной полосы до точки выравнивания.
Это обеспечивает посадку в заданной области ВПП.
Сущность изобретения заключается в том, что в условиях отсутствия визуальной видимости ВПП автономно с помощью БРЛС обнаруживают ВПП и определяют отклонения ВС от посадочной траектории в горизонтальной и вертикальной плоскостях, т.е. по курсу и глиссаде. При этом отклонение от курса наблюдается в виде несимметричного радиолокационного изображения (РЛИ) ВПП. Информация об асимметрии используется для устранения отклонений от курса посадки. При этом используется средняя линия РЛИ ВПП, а повышение точности осуществляется при использовании прямолинейной средней линии РЛИ ВПП. Устранение отклонений от курса посадки осуществляют при совмещении прямолинейной отметки средней линии симметричного изображения РЛИ ВПП с отметкой вектора путевой скорости ВС. Контроль посадочной траектории в вертикальной плоскости выполняют путем измерения с помощью БРЛС наклонной дальности (Д3) до передней кромки ВПП, совпадающей с началом выравнивания, затем вычисляют горизонтальную дальность до передней кромки ВПП (Д4) из выражения
 ,
,
где Η - высота полета,
вычисляют горизонтальную составляющую глиссадной дальности до точки выравнивания (Д2) из выражения
 ,
,
где α - угол заданной глиссады. Полет по заданной глиссаде обеспечивается, когда пилот управляет ВС таким образом, чтобы выполнялось равенство Д4=Д3, т.е. при условии Д4-Д2=0 (см. фиг. 1, 2, 3).
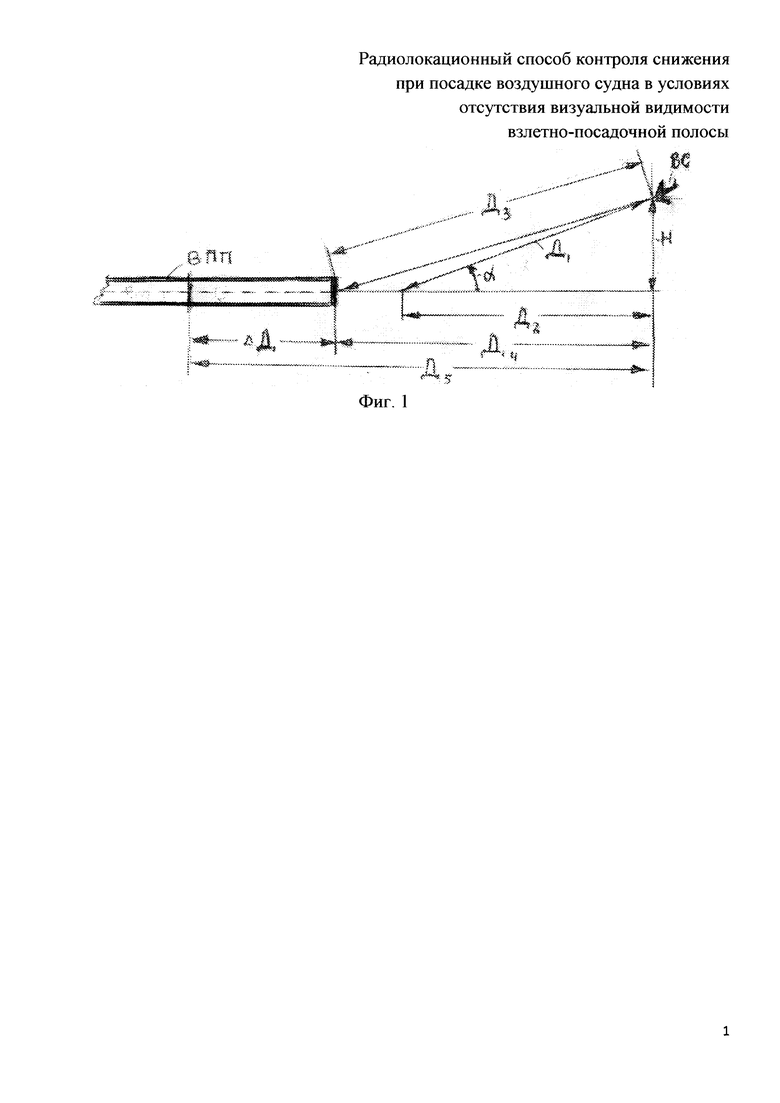
Сущность изобретения поясняется иллюстрациями, представленными на фиг. 1-3, где на фиг. 1 представлены геометрические соотношения в режиме автономного контроля снижения ВС до точки начала выравнивания, где:
Д1 - наклонная дальность в соответствии с заданным углом глиссады (α),
Д2 - горизонтальная дальность в соответствии с заданным углом глиссады (α),
Д3 - наклонная дальность до торца РЛИ ВПП,
Д4 - горизонтальная дальность до торца РЛИ ВПП,
Д5 - горизонтальная дальность до точки выравнивания, удаленной от передней кромки (торца) ВПП на горизонтальную дальность АД. При этом имеют место следующие соотношения:

Д5=Д4+ΔД.
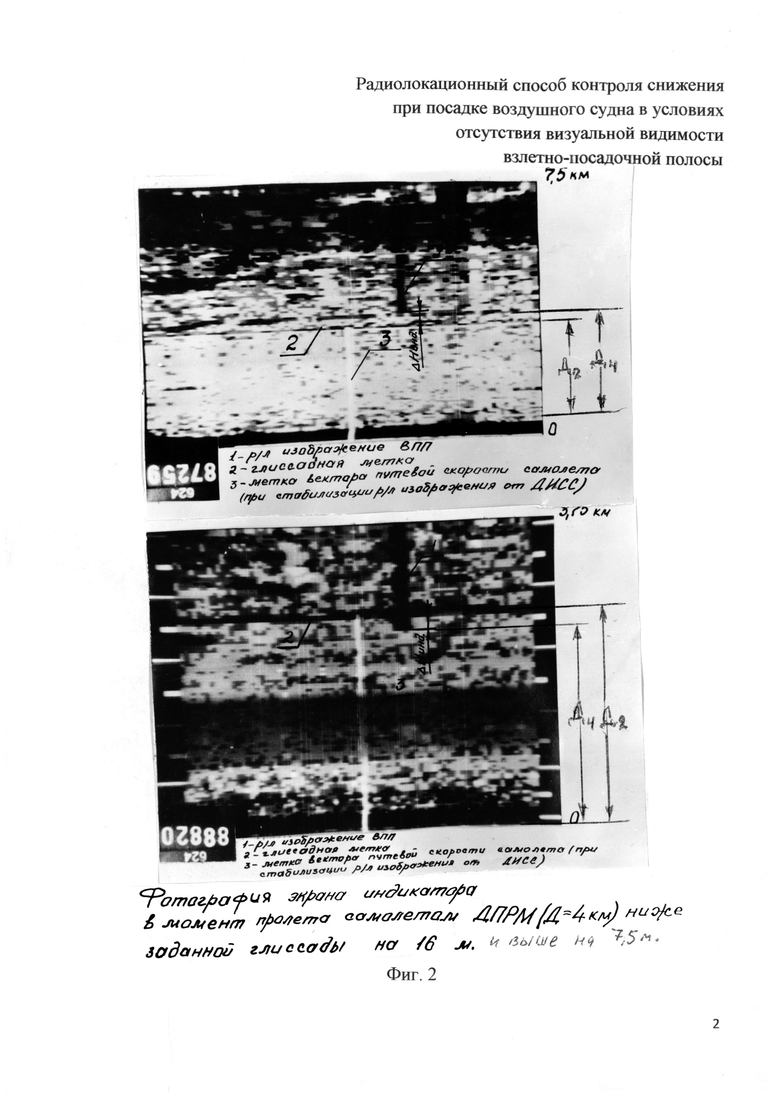
На фиг. 2 представлены фотографии экрана индикатора в момент пролета самолетом БПРМ ниже заданной глиссады на 16 м и выше на 7,5 м.
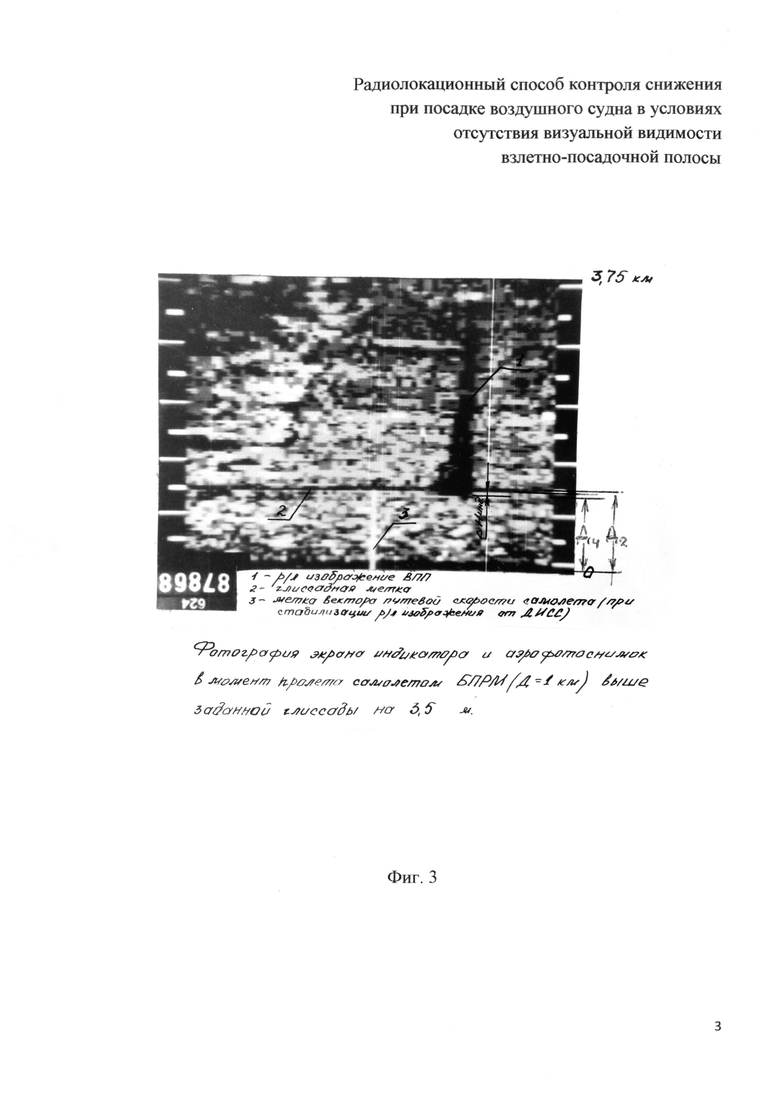
1 - радиолокационное изображение ВПП,
2 - глиссадная метка,
3 - метка вектора путевой скорости самолета.
На фиг. 3 - фотография экрана индикатора в момент пролета самолетом БПРМ выше заданной глиссады на 3,5 м.
Предлагаемый способ позволяет повысить точность контроля снижения, уменьшить время оценки отклонения ВС от посадочной траектории, что снижает психологическое напряжение пилота в условиях отсутствия визуальной видимости и в СМУ.
Кроме того, повышается точность контроля снижения при посадке ВС на участок ВПП, удаленный от передней кромки (торца) ВПП.
Предлагаемый способ является автономным и его целесообразно использовать при необходимости посадки на шоссе и др. нестандартные площадки.
Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| Система захода и посадки на взлётно-посадочную полосу воздушного судна с бортовой РЛС | 2019 |
|
RU2728208C1 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
Изобретение относится к области радионавигации и предназначается для контроля снижения воздушных судов (ВС) до точки начала выравнивания в условиях отсутствия визуальной видимости взлетно-посадочной полосы (ВПП). Достигаемый технический результат – повышение точности контроля снижения, а также выполнения посадки в область ВПП, удаленную от торца ВПП, что необходимо, когда у торца ВПП появляются препятствия. Сущность изобретения состоит в обнаружении с помощью бортовой радиолокационной станции (БРЛС) отклонений ВС от посадочной траектории в горизонтальной и вертикальной плоскостях, выполнении автономного контроля посадки без использования аэродромных посадочных систем. При отклонении в горизонтальной плоскости (по курсу) обнаруживают асимметрию радиолокационного изображения (РЛИ) ВПП и используют эту информацию для устранения отклонений от курса посадки. Пилот устраняет отклонения от курса посадки при совмещении прямолинейной отметки средней линии ВПП с отметкой вектора путевой скорости. Контроль посадочной траектории в вертикальной плоскости выполняется после обнаружения и измерения наклонной дальности до торца ВПП (Д3). Затем вычисляют горизонтальную дальность до торца ВПП (Д4) из выражения  , где Η - высота полета, вычисляют горизонтальную составляющую глиссадной дальности Д2 при полете по заданной глиссаде до точки выравнивания из выражения
, где Η - высота полета, вычисляют горизонтальную составляющую глиссадной дальности Д2 при полете по заданной глиссаде до точки выравнивания из выражения  , где α - угол заданной глиссады. Полет по заданной глиссаде обеспечивается, когда пилот управляет ВС таким образом, чтобы выполнялось равенство: Д4=Д2 (т.е. когда Д4-Д2=0). 2 з.п. ф-лы, 3 ил.
, где α - угол заданной глиссады. Полет по заданной глиссаде обеспечивается, когда пилот управляет ВС таким образом, чтобы выполнялось равенство: Д4=Д2 (т.е. когда Д4-Д2=0). 2 з.п. ф-лы, 3 ил.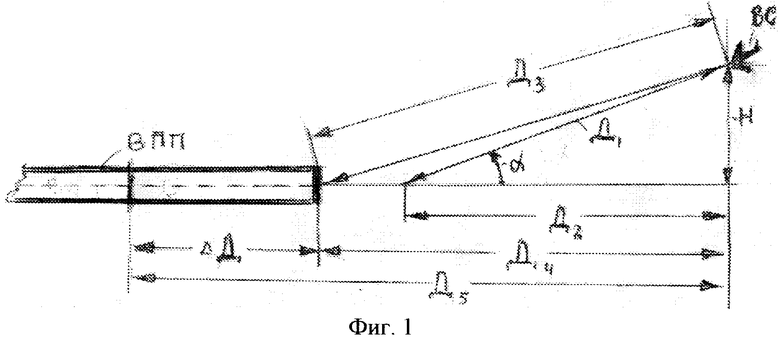
1. Радиолокационный способ контроля снижения при посадке воздушного судна в условиях отсутствия визуальной видимости взлетно-посадочной полосы, отличающийся тем, что определяют боковое отклонение от посадочной траектории в горизонтальной плоскости по асимметрии радиолокационного изображения ВПП, корректируют курс посадочной траектории, для чего совмещают отметку вектора путевой скорости с прямолинейной отметкой средней линии симметричного радиолокационного изображения взлетно-посадочной полосы; контроль посадочной траектории в вертикальной плоскости осуществляют при полете на прямолинейном участке посадочной траектории после обнаружения бортовой радиолокационной станцией переднего торца взлетно-посадочной полосы, для чего измеряют с помощью бортовой радиолокационной станции наклонную дальность до торца взлетно-посадочной полосы, совпадающую с точкой начала выравнивания, вычисляют горизонтальную дальность до торца взлетно-посадочной полосы в соответствии с выражением (1), вычисляют горизонтальную составляющую глиссадной дальности при полете по заданной глиссаде до точки выравнивания в соответствии с выражением (2) и осуществляют полет по заданной глиссаде, для чего пилот управляет воздушным судном в вертикальной плоскости таким образом, чтобы выполнялось равенство горизонтальной дальности до торца взлетно-посадочной полосы горизонтальной составляющей глиссадной дальности при полете по заданной глиссаде до точки выравнивания

где Д3 - наклонная дальность до торца взлетно-посадочной полосы,
Д4 - горизонтальная дальность до торца взлетно-посадочной полосы,
Н - высота полета;

где Д2 - горизонтальная составляющая глиссадной дальности при полете по заданной глиссаде до точки выравнивания;
α - угол заданной глиссады.
2. Способ по п. 1, отличающийся тем, что для посадки в область, удаленную от торца взлетно-посадочной полосы, формируют на индикаторе отметку, которая фиксирует расстояние от торца взлетно-посадочной полосы и является составной частью горизонтальной дальности до точки выравнивания в соответствии с выражением (3), обеспечивающей посадку в заданной области взлетно-посадочной полосы

где Д5 - горизонтальная дальность до точки выравнивания;
ΔД - расстояние от торца взлетно-посадочной полосы до области посадки
3. Способ по п. 1 или 2, отличающийся тем, что сформированные отметки окрашивают на экране индикатора бортовой радиолокационной станции в различные цвета.
| Способ контроля и корректировки угла глиссады воздушного судна относительно точки приземления | 1991 |
|
SU1804628A3 |
| СИСТЕМА ИНСТРУМЕНТАЛЬНОГО ЗАХОДА САМОЛЕТОВ НА ПОСАДКУ ПО РАДИОМАЯКАМ, ОБОЗНАЧАЮЩИМ НАЧАЛО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2012 |
|
RU2492525C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543144C2 |
| WO 2010020751 A2, 25.02.2010 | |||
| US 4490802 A, 25.12.1984 | |||
| US 4101893 A,18.07.1978. | |||

