Изобретение относится к области управления воздушным движением, а именно к области посадки летательных аппаратов (ЛА) на взлетно-посадочную полосу (ВПП) и может быть эффективно использовано для аэропортов с большой интенсивностью, движения.
Известны способ и аппаратура оповещения экипажа о расположении ЛА относительно взлетно-посадочных полос, реализующие функцию RAAS (Runway Awareness and Advisory System), разработанные и запатентованные фирмой Honeywell [1, 2, 3]. Согласно функции RAAS на конечном участке захода на посадку формируют оповещение о выборе ВПП и расположении ЛА относительно ВПП. Эти оповещения формируются при выполнении определенных условий:
- при удалении от входного торца ВПП от 0.5 до 3 миль (0.9-5.5 км) [3, рис.8];
- в диапазоне высот ЛА над ВПП от 300 до 700 футов (90-215 м); исключая диапазон±50 футов (±15 м) относительно высоты, сообщаемой внутри указанного диапазона;
- в заданном диапазоне углов снижения для данного диапазона высот, например 2-15 градусов для высот менее 500 футов (150 м), что соответствует возможному диапазону углов наклона траекторий захода на посадку для всего парка ЛА [3, рис.9], и при нахождении ЛА в горизонтальном угловом секторе с вершиной в заданной точке посадки и биссектрисой, совпадающей со средней линией ВПП [3, рис.10].
Вопросы способа формирования оповещения о расположении ЛА относительно полосы (СпОРП) рассмотрены в [1-3] в разных аспектах.
В [1] рассматриваются вопросы программного обеспечения, в [2] - вопросы графического представления информации для отображения на экране в кабине пилотов, в том числе и потенциального столкновения ЛА с внешними объектами путем отображения пересечения векторов скоростей ЛА и внешних объектов.
В обобщающем патенте [3] рассматривается расширенный комплекс вопросов - программное обеспечение и аппаратура.
Наиболее общим и близким аналогом является способ, заявленный в [4], который следует считать прототипом заявленного изобретения. Согласно [4] последовательность действий способа можно обобщить следующим образом.
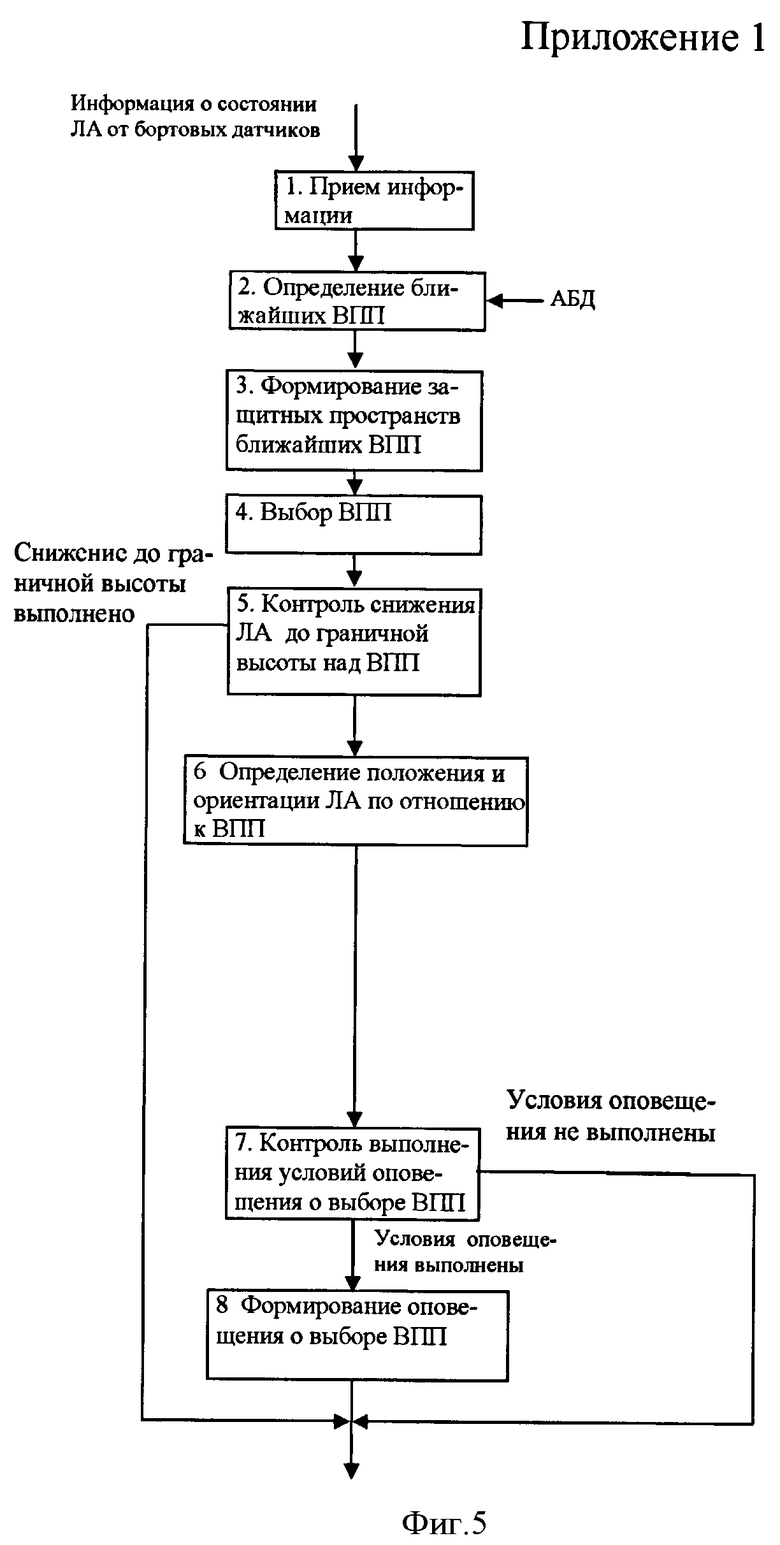
Способ оповещения о расположении летательного аппарата относительно взлетно-посадочных полос при заходе на посадку, состоящий в том, что последовательно производят прием информации о параметрах динамического состояния летательного аппарата от его бортовых датчиков, на основе упомянутой информации и аэронавигационной базы данных определяют ближайшие взлетно-посадочные полосы, формируют защитные пространства для ближайших взлетно-посадочных полос и выбирают взлетно-посадочные полосы для захода на посадку, контролируют снижение летательного аппарата до граничной высоты над каждой выбранной взлетно-посадочной полосой, для взлетно-посадочных полос, над которыми при снижении летательного аппарата не достигнута граничная высота, последовательно определяют положение и ориентацию летательного аппарата по отношению к выбранным взлетно-посадочным полосам, контролируют выполнение условий оповещения о выборе взлетно-посадочных полос и в случае выполнения этих условий формируют упомянутое оповещение, причем действия способа непрерывно полностью повторяют до момента снижения летательного аппарата до упомянутой граничной высоты над каждой выбранной взлетно-посадочной полосой и в указанный момент прекращают формирование оповещения о выборе взлетно-посадочных полос.
Последовательность действий способа-прототипа приведена на фиг.5. (Приложение 1).
Упомянутые условия оповещения о выборе взлетно-посадочных полос представляют собой:
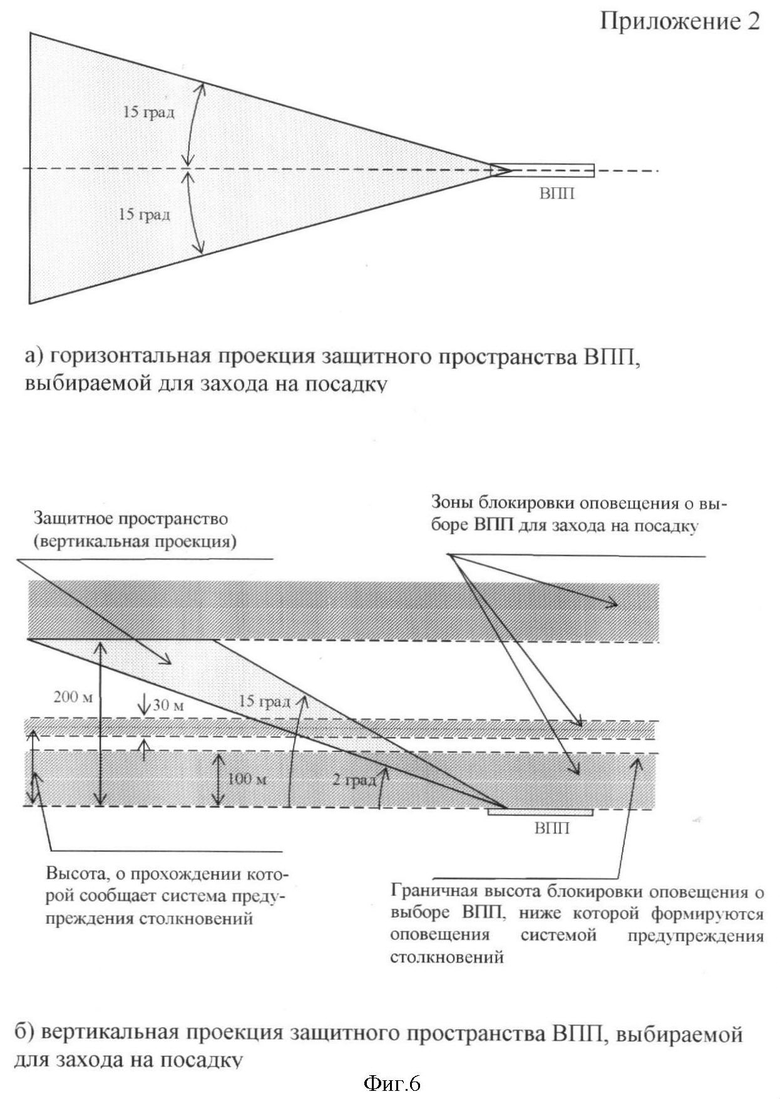
- нахождение ЛА внутри защитного пространства, представляющего собой координатно связанную с выбранной ВПП область, горизонтальная и вертикальная проекция которой приведены на фиг.6 (Приложение 2);
- допустимую угловую ориентацию вектора путевой скорости ЛА относительно курса выбранной ВПП;
- нахождение ЛА вне диапазона высот над выбранной ВПП, предусмотренного для блокировки оповещения о выборе ВПП для захода на посадку.
Способ оповещения, рассматриваемый в упомянутых аналогах и прототипе, обладает рядом следующих существенных недостатков.
- Оповещение (сигнализация) о выборе ВПП для захода на посадку либо не учитывает, либо учитывает весьма неточно наличие недопустимых отклонений ЛА от заданной траектории захода на посадку (в вертикальной и горизонтальной плоскостях).
- При наличии и использовании систем инструментальной посадки, которыми оснащены крупные аэропорты, оповещение об указанных выше отклонениях ЛА в любую сторону в трехмерной системе координат формируется в самой системе инструментальной посадки. Однако при выходе из строя системы инструментальной посадки, при сбоях в сигналах инструментальной посадки, а также при отсутствии таковой в аэропорту (последнее имеет место во множестве аэропортов России) экипаж ЛА лишен сообщений об отклонениях положения ЛА от заданной траектории.
- В известных способах либо вообще не учитывают угол наклона траектории захода на посадку, либо используют весь возможный диапазон углов наклона посадочных траекторий, характерный для всех используемых ЛА (от 2 до 15 градусов), в то время как для каждого из типов ЛА диапазон упомянутых углов значительно уже. Кроме того, упомянутый диапазон углов для каждого ЛА зависит от загрузки, технического состояния ЛА, а также от метеоусловий.
- Сформированное оповещение о выборе ВПП для посадки никак не опровергается даже в случае последующего нарушения условий оповещения.
Задачей заявляемого изобретения является повышение надежности посадки ЛА путем формирования адаптированного к типу ЛА оповещения о выборе ВПП, формирования предупреждения об отклонениях положения ЛА от заданной траектории и об отклонениях прогнозируемой точки посадки от заданной точки посадки.
Суть заявляемого способа оповещения о расположении летательного аппарата относительно взлетно-посадочных полос при заходе на посадку состоит в том, что последовательно производят прием информации о параметрах динамического состояния летательного аппарата от его бортовых датчиков, на основе упомянутой информации и аэронавигационной базы данных определяют ближайшие взлетно-посадочные полосы, формируют защитные пространства для ближайших взлетно-посадочных полос и выбирают взлетно-посадочные полосы для захода на посадку, контролируют снижение летательного аппарата до граничной высоты над каждой выбранной взлетно-посадочной полосой, для взлетно-посадочных полос, над которыми при снижении летательного аппарата не достигнута граничная высота, последовательно определяют положение и ориентацию летательного аппарата по отношению к выбранным взлетно-посадочным полосам, контролируют выполнение условий оповещения о выборе взлетно-посадочных полос и в случае выполнения этих условий формируют упомянутое оповещение, причем действия способа непрерывно полностью повторяют до момента снижения летательного аппарата до упомянутой граничной высоты над каждой выбранной взлетно-посадочной полосой и в указанный момент прекращают формирование оповещения о выборе взлетно-посадочных полос, при этом после выбора взлетно-посадочных полос для каждой из них рассчитывают заданную траекторию захода на посадку исходя из высоты прохождения летательным аппаратом заданного расстояния от входного торца взлетно-посадочной полосы, формируют уточненное защитное пространство для каждой взлетно-посадочной полосы на основе допустимых углов наклона заданных траекторий захода на посадку для данного типа летательного аппарата, подтверждают выбор каждой взлетно-посадочной полосы для захода на посадку и в случае подтверждения этого выбора осуществляют упомянутые определение положения и ориентации летательного аппарата по отношению к выбранным взлетно-посадочным полосам, контроль выполнения условий оповещения и формирование оповещения о выборе взлетно-посадочных полос, при этом после приема информации от бортовых датчиков параллельно и непрерывно формируют прогнозируемую траекторию методом линейной аппроксимации пройденной на переменном интервале времени траектории, причем вычисление величины упомянутого интервала времени непрерывно производят на основе определения по информации от бортовых датчиков параметров турбулентности атмосферы, параметров динамического состояния летательного аппарата, а также данных о динамических возможностях летательного аппарата и характеристиках точности бортовых датчиков, а после проведения контроля снижения летательного аппарата до граничной высоты над каждой выбранной взлетно-посадочной полосой формируют в случае выбора только одной взлетно-посадочной полосы сигнал, по которому параллельно и непрерывно с учетом заданной траектории, данных о динамических возможностях летательного аппарата и характеристиках точности бортовых датчиков определяют пространственную зону допустимых отклонений от заданной траектории, затем вычисляют текущие отклонения летательного аппарата от заданной траектории, также по упомянутому сигналу проводят определение прогнозируемой точки посадки путем продления аппроксимированной траектории до пересечения с горизонтальной плоскостью, проходящей через середину входного торца взлетно-посадочной полосы, затем вычисляют отклонение прогнозируемой точки посадки от заданной точки посадки, также по упомянутому сигналу вычисляют параметры зоны допустимых отклонений прогнозируемой точки посадки от заданной точки посадки, при этом в случае отсутствия подтверждения выбора взлетно-посадочных полос, а также в случае невыполнения условий упомянутого оповещения о выборе взлетно-посадочных полос формируют предупреждение о недопустимых отклонениях летательного аппарата от заданной траектории и прогнозируемой точки посадки от заданной точки посадки.
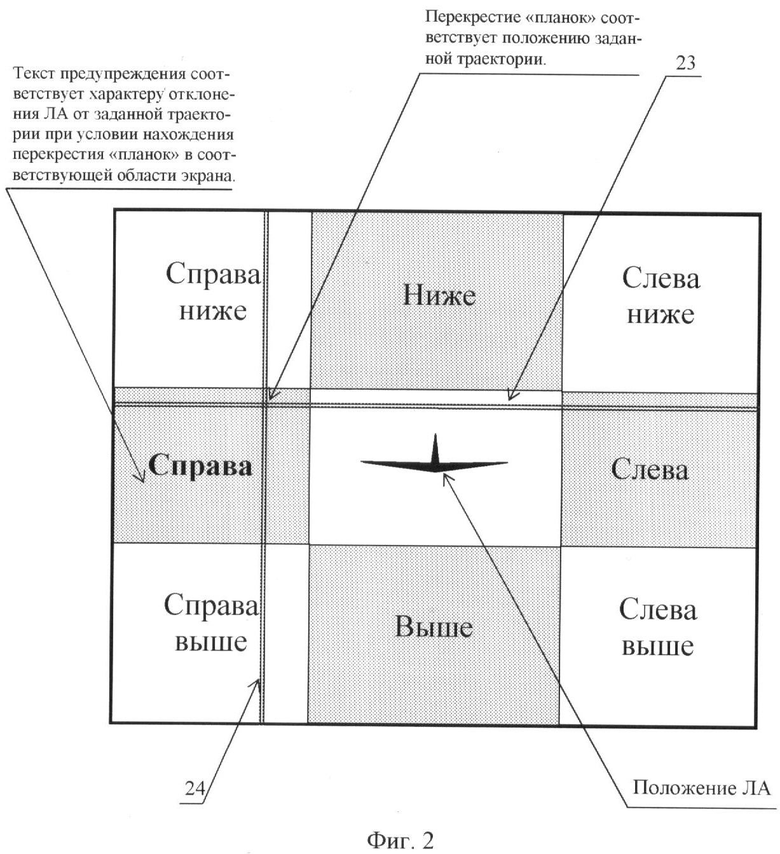
Предлагается также способ оповещения, в котором предупреждение об отклонении ЛА от заданной траектории формируют посредством отображения на экране индикатора прямоугольного сечения пространства в вертикальной плоскости, причем центр прямоугольного сечения соответствует текущему положению ЛА, площадь прямоугольного сечения разделена на девять прямоугольных областей, одна из которых является центральной и характеризуется границами, соответствующими допустимым отклонениям от заданной траектории, а восемь областей, окружающих центральную, разграничены в соответствии с характером недопустимых отклонений ЛА от заданной траектории по вертикали и горизонтали.
Предлагается также способ оповещения, в котором предупреждение об отклонении прогнозируемой точки посадки от заданной точки посадки формируют посредством отображаемой на экране индикатора прямоугольной горизонтальной проекции участка поверхности проходящей через центр входного торца взлетно-посадочной полосы, в центре которой находится заданная точка посадки и эллипс, ограничивающий зону допустимых отклонений прогнозируемой точки посадки от заданной точки посадки, при этом пространство вокруг упомянутой зоны допустимых отклонений прогнозируемой точки посадки разделено на десять областей, пять из которых расположены выше, а пять областей расположены ниже средней линии, причем каждая из областей отражает характер недопустимых отклонений прогнозируемой точки посадки от заданной точки посадки.
Работа способа поясняется с помощью фиг.1-4.
На фиг.1 представлена схема последовательности действий способа.
На фиг.2 представлено отображение областей формирования предупреждений о недопустимых отклонениях ЛА от заданной траектории.
На фиг.3 представлено отображение областей формирования предупреждений о недопустимых отклонениях прогнозируемой точки посадки от заданной точки посадки.
На фиг.4 представлено расположение на ВПП зоны допустимых (на момент приземления) отклонений точки посадки от заданной точки посадки и примеры расположения зоны допустимых отклонений прогнозируемой точки посадки от заданной точки посадки (для двух различных удалений ЛА от входного торца ВПП).
Схема на фиг.1 включает следующие действия, общие со способом-прототипом (показаны тонкими линиями):
производят прием информации о параметрах динамического состояния ЛА от его бортовых датчиков 1;
на основе упомянутой информации и аэронавигационной базы данных (АБД) определяют ближайшие ВПП 2;
формируют защитные пространства (ЗП) для ближайших ВПП 3 (см. фиг.6 (Приложение 2));
выбирают ВПП для захода на посадку 4;
контролируют снижение ЛА до граничной высоты над каждой выбранной ВПП 5;
для ВПП, над которыми при снижении ЛА не достигнута граничная высота, последовательно определяют положение и ориентацию ЛА по отношению к выбранным ВПП 6;
контролируют выполнение условий оповещения о выборе взлетно-посадочных полос 7; при этом контроле, помимо упомянутой граничной высоты, вводят зону запрета формирования упомянутого оповещения по высоте, определяемую типом ЛА и обусловленную необходимостью формирования другими системами сообщения о достижении ЛА определенной высоты над взлетно-посадочными полосами (например, системой предупреждения о возможном столкновении ЛА с рельефом местности);
в случае выполнения условий формирования оповещения о выборе ВПП формируют упомянутое оповещение 8.
В случае подтверждения выбора ВПП для посадки действия способа непрерывно полностью повторяются до момента снижения ЛА до граничной высоты над каждой выбранной ВПП, ниже которой не производится формирование оповещения о выборе взлетно-посадочных полос.
Действия СпОРП 1-8 производятся так же, как и в прототипе [4].
Однако в предлагаемом способе вводятся более жесткие, по сравнению с прототипом, условия формирования оповещения по углу места, соответствующие значениям угла места, полученным на основе допустимых углов наклона заданных траекторий захода на посадку для данного типа ЛА. Работа по вновь введенным действиям поясняется ниже. Заданная траектория захода на посадку лежит в вертикальной плоскости, проходящей через продольную ось симметрии BПП. Расчет заданной траектории 9 производится на основании данных бортовых датчиков о высоте ЛА над каждой выбранной ВПП на заданном расстоянии от входного торца ВПП, известном для каждого типа ЛА и соответствующем прохождению высоты 200 м над ВПП (составляющем около 4 км для стандартной глиссады). Именно с этого расстояния при визуальных заходах на посадку, как правило, производится выдерживание линейной траектории снижения. Заданная траектория рассчитывается в вертикальной плоскости, проходящей через ось ВПП, от проекции на эту плоскость расчетной точки прохождения заданного расстояния до опорной, которая определяется как точка над серединой входного торца ВПП (точкой пересечения входного торца с осевой линией ВПП) на заданной высоте, как правило, около 15 м [8]. При этом высота над ВПП упомянутой расчетной точки прохождения заданного расстояния определяется или как текущая высота ЛА на момент прохождения (если упомянутое расстояние пройдено на высоте, отличающейся от 200 м в пределах поля допуска), или как сумма 200 м и половины этого поля допуска соответствующего знака. Пересечение упомянутой линейной траектории с горизонтальной плоскостью, проходящей через середину входного торца ВПП, считается заданной точкой посадки.
Формирование уточненных ЗП для выбранных ВПП 10 производится путем коррекции параметров вертикальных проекций ЗП в соответствии с допустимым диапазоном углов наклона траектории захода на посадку и допустимым диапазоном отклонений от этой траектории для ЛА данного типа.
Подтверждение выбора ВПП для захода на посадку 11 производится при нахождении ЛА в уточненных ЗП выбранных ранее ВПП.
Только после подтверждения выбора ВПП осуществляют указанное в прототипе [4] определение положения и ориентации ЛА по отношению к выбранным ВПП 5, контролируют выполнение условия оповещения 7 и формируют это оповещение 8.
Если после формирования неуточненных ЗП выбрана только одна ВПП, то после проведения контроля снижения ЛА до граничной высоты над выбранной ВПП 5 при необходимости выполняются дополнительные действия, помогающие экипажу осуществлять посадку и состоящие в формировании предупреждений об отклонении текущего положения ЛА от заданной траектории и об отклонении прогнозируемой точки посадки от заданной точки посадки.
С этой целью формирование прогнозируемой траектории 12 проводят непрерывно и параллельно после приема информации от бортовых датчиков методом линейной аппроксимации пройденной траектории.
За основу аппроксимации выбирают участок пройденной траектории на переменном интервале времени. Вычисление продолжительности данного интервала времени 13 проводят до упомянутой аппроксимации на основе определяемых по информации от бортовых датчиков параметров турбулентности атмосферы 14 и параметров динамического состояния ЛА 15 (векторы скорости, ускорения, вес и др.), а также данных о динамических возможностях ЛА и точности бортовых датчиков.
Учет динамических возможностей ЛА состоит в том, что вычисление продолжительности упомянутого интервала времени проводят с помощью хранящихся в памяти вычислителя расчетных таблиц, составленных предварительно по результатам решений системы динамических уравнений для ЛА данного типа, общий вид которых приведен, например, в [5, б]. Такие таблицы рассчитывают для всевозможных динамических состояний ЛА при различных сочетаниях факторов, влияющих на полет ЛА.
Проведение линейной аппроксимации пройденной траектории на вычисленном интервале времени осуществляется методом скользящего среднего [7] путем обработки горизонтальных координат и высоты ЛА в течение упомянутого интервала.
Применение метода скользящего среднего обусловлено необходимостью уменьшения влияния на получаемый результат флуктуационных погрешностей определения координат и высоты ЛА, а также влияния изменений координат и высоты, вызванных турбулентностью атмосферы и случайными составляющими сигналов управления.
После формирования сигнала о выборе только одной ВПП 16 и расчета заданной траектории захода на посадку 9 на основе АБД и данных о заданном расстоянии от входного торца ВПП на момент прохождения высоты 200 м над ВПП для ЛА данного типа производят (с учетом данных о динамических возможностях ЛА и характеристиках точности бортовых датчиков) определение пространственной зоны допустимых отклонений от заданной траектории 17, затем вычисляют текущие отклонения ЛА от заданной траектории 18.
Также после формирования сигнала о выборе только одной ВПП определяют прогнозируемую точку посадки 19 как точку пересечения продленной линейно аппроксимированной пройденной траектории 12 с горизонтальной плоскостью, проходящей через середину входного торца ВПП, затем вычисляют отклонение упомянутой прогнозируемой точки посадки от заданной точки посадки 20.
Также после формирования сигнала о выборе только одной ВПП проводят вычисление параметров зоны допустимых отклонений прогнозируемой точки посадки от заданной точки посадки 21. Это действие выполняется по известной на борту функции - зависимости параметров упомянутой зоны от дальности до входного торца ВПП. Параметры упомянутой зоны определяют в виде размеров полуосей эллипса с центром в заданной точке посадки, лежащего в горизонтальной плоскости, проходящей через середину входного торца ВПП. Площадь упомянутого эллипса уменьшается с уменьшением дальности от ЛА до входного торца ВПП. Упомянутая функция, на основе которой проводят вычисление параметров зоны допустимых отклонений прогнозируемой точки посадки от заданной точки посадки, определяется заранее путем статистической обработки траекторий успешных заходов на посадку ЛА данного типа и хранится в цифровом виде в бортовой базе данных.
В случае отсутствия подтверждения выбора взлетно-посадочных полос, а также в случае невыполнения условий упомянутого оповещения о выборе ВПП формируют предупреждение о недопустимых отклонениях ЛА от заданной траектории и прогнозируемой точки посадки от заданной точки посадки 22.
Непрерывно производят контроль снижения ЛА до граничной высоты над ВПП 5. До момента достижения граничной высоты действия способа непрерывно повторяются, начиная с определения ближайших ВПП 2 после приема информации от бортовых датчиков 1. Если условия формировании оповещения о выборе одной ВПП продолжают выполняться после того, как оповещение выдано один раз, упомянутое оповещение больше не производится. Если прекращается выполнение упомянутых условий, то производится формирование предупреждения о недопустимых отклонениях ЛА от заданной траектории или о недопустимых отклонениях прогнозируемой точки посадки от заданной точки посадки (или о том и о другом одновременно). Если затем, в результате действий экипажа, вновь начинают выполняться условия формирования оповещения о выборе ВПП, то оповещение о выборе ВПП производится повторно. Тем самым экипаж получает либо подтверждение о произведенном ранее выборе (в случае, когда появившиеся недопустимые отклонения были вызваны ошибками управления), либо оповещение о произведенном выборе другой ВПП (в случае, когда появившиеся недопустимые отклонения были вызваны маневрированием, намеренно выполненным экипажем и обусловленным содержанием ранее полученного оповещения о неверном выборе ВПП).
После достижения граничной высоты прекращается как упомянутое формирование оповещения о выборе ВПП, так и упомянутое формирование предупреждения об отклонениях от требуемой траектории и от заданной точки посадки.
Экипаж, принимая решение о возможности продолжения захода на посадку или об уходе на второй круг, учитывает наличие оповещений и предупреждений, сформированных описанным выше способом, или их отсутствие. После выполнения маневра ухода на второй круг вновь осуществляемый заход на посадку также производится с использованием описанного выше способа.
Использование для проверки условий оповещения о выборе ВПП защитного пространства ВПП, уточненного путем использования данных о допустимых углах наклона заданных траекторий захода на посадку для данного типа летательного аппарата, позволяет повысить достоверность упомянутого оповещения и тем самым помочь экипажу выполнить посадку более качественно и безопасно.
Относительно формирования предупреждения об отклонении от заданной траектории и от заданной точки посадки следует заметить следующее.
1. Выбор только одной ВПП, производимый до определения уточненного защитного пространства, позволяет с помощью предупреждений проинформировать экипаж о недопустимых отклонениях от заданной траектории и заданной точки посадки и тем самым своевременно помочь экипажу устранить эти отклонения и ускорить получение оповещения о выборе ВПП для захода на посадку до момента прохождения граничной высоты, ниже которой формирование такого оповещение становится невозможным по условиям его блокировки.
2. Предупреждения о недопустимом отклонении прогнозируемой точки посадки от заданной точки посадки следует формировать только при одновременном выполнении следующих условий:
- прогнозируемая точка посадки существует - прогнозируемая траектория пересекает горизонтальную плоскость, проходящую через середину входного торца ВПП;
- характер недопустимого отклонения носит устойчивый характер - прогнозируемая точка посадки незначительно изменяет свое расположение на картине отображения (см. фиг.3) в течение определенного времени (например, в течение 10 секунд перемещается на площади, не превышающей 10% общей площади картины, или перемещается вдоль границы картины не более чем на 20% ее линейного размера), так как кратковременное «искривление» пройденной траектории, способное повлиять на быстрое изменение результата линеаризации, может быть обусловлено сдвигом ветра, скачкообразными ошибками датчиков местоопределения, активным управлением, направленным на удерживание ЛА на заданной траектории захода на посадку, и другими кратковременными факторами.
3. Наиболее эффективно сопровождать предупреждение визуальным отображением. Для формирования предупреждений о недопустимых отклонениях ЛА от заданной траектории предлагается использовать картину отображения, представленную на фиг.2. Для формирования предупреждений о недопустимых отклонениях прогнозируемой точки посадки от заданной точки посадки предлагается использовать картину отображения, представленную на фиг.3.
По картине отображения на фиг.2 можно получить информацию о расположении ЛА выше или ниже заданной траектории и об отклонении ЛА от заданной траектории в правую или левую сторону (в том числе с учетом характера вертикального отклонения ЛА от заданной траектории). Положение ЛА на картине отражается неподвижным символом в центре экрана. Смещение ЛА выше или ниже заданной траектории на картине отражается положением горизонтальной «планки» 23, а смещение ЛА в правую или левую стороны от заданной траектории отражается положением вертикальной «планки» 24. При этом перекрестие планок (точка их пересечения) отражает на картине положение заданной траектории. Надписи, размещенные на картине в восьми областях экрана, отражают содержание формируемых предупреждений, если на момент выполнения условий их формирования перекрестие планок (соответствующее перекрестию планок традиционного командного прибора, используемого экипажем для выполнения инструментальной посадки) находится в пределах одной из этих областей.
По картине отображения на фиг.3 можно получить информацию о недопустимых отклонениях прогнозируемой точки посадки от заданной точки посадки: «перелет», «недолет», «правее», «левее», «перелет правее» и т.д. Размеры отображаемого на картине эллипса, ограничивающего область допустимых отклонений прогнозируемой точки посадки, с изменением дальности до входного торца ВПП остаются неизменными, т.е. по мере приближения ЛА к входному торцу ВПП отображаемая на картине площадь поверхности уменьшается. Если отклонения прогнозируемой точки посадки от заданной точки посадки лежат за пределами отображаемой на картине площади, прогнозируемая точка посадки отображается вблизи границы картины в месте, соответствующем ее угловому смещению по отношению к заданной точке посадки. Если прогнозируемая точка посадки не существует (прогнозируемая траектория не пересекает горизонтальную плоскость, проходящую через середину входного торца ВПП), то прогнозируемая точка посадки на картине не отображается и предупреждение об отклонении от заданной точки посадки в этом случае не формируется.
На фиг.4 представлено расположение на ВПП границы зоны допустимых отклонений от заданной точки посадки (сплошная линия) [9] и возможных границ зоны допустимых отклонений прогнозируемой точки посадки от заданной точки посадки (пунктирные линии) в виде концентрических эллипсов с центром в заданной точке посадки для двух различных значений дальности ЛА до входного торца ВПП.
Таким образом, предложенный способ позволяет повысить надежность посадки ЛА путем:
- формирования адаптированного к типу ЛА оповещения о выборе ВПП для захода на посадку;
- формирования предупреждения об отклонениях положения ЛА от заданной траектории и об отклонениях прогнозируемой точки посадки от заданной точки посадки, когда условия формирования оповещения о выборе ВПП для захода на посадку не выполняются (для неинструментальных заходов на посадку);
- формирования повторного оповещения о выборе ВПП, в случае если после первого формирования условия формирования были нарушены, а затем восстановлены (например, в результате действий экипажа, направленных на устранение недопустимых отклонений от заданной траектории захода на посадку или на устранение недопустимых отклонений прогнозируемой точки посадки от заданной точки посадки).
Экспериментальное подтверждение эффективности предлагаемого способа проведено посредством математического моделирования и анализа результатов летных испытаний.
Математическое моделирование показало, что вероятность ложного оповещения или невыдачи оповещения снижается на 20-30% по сравнению со способом-прототипом.
Анализ результатов летных испытаний на самолетах Ту-204 и Ил-76 показал, что использование предложенного способа повышает эффективность формирования сообщения о заходе на ВПП в среднем на 15-20% по сравнению со способом-прототипом.
Указанное повышение надежности оповещения существенно повышает безопасность посадки. Например, летные испытания на вертолете типа Ми-8 показали, что при заходе на посадку по крутой глиссаде в сложных метеоусловиях вероятность недопустимой ошибки выхода в расчетную точку посадки снижается на 15-20%.
Обобщение результатов применения предложенного способа для различных типов ЛА позволяет оценить общее повышение безопасности посадки величиной в 10-15% по сравнению с существующими прототипом и аналогами.
Способ найдет широкое применение в первую очередь в аэропортах России, необорудованных штатными инструментальными системами посадки.
Литературные источники
1. Патент США № 698320682, кл. G08B 23/00, заявл. 15.05.2003 г., опубл. 03.01.2006 г.
2. Патент США № 7079951 В2, кл. G01S 13/00, заявл. 10.12.2004 г., опубл. 18.07.2006 г.
3. Патент США № 7 206 698 В2, кл. G06F 17/00, заявл. 10.12.2004 г., опубл. 17.04.2007 г.
4. Патент США № 7 363 145 В2, кл. G08G 5/00, заявл. 10.12.2004 г., опубл. 22.04.2008 г.
5. Остославский И.В., Стражева И.В. Динамика полета. Устойчивость и управляемость летательных аппаратов. М., Машиностороение, 1965.
6. Остославский И.В., Стражева И.В. Динамика полета. Траектории летательных аппаратов. М., Машиностороение, 1969.
7. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. Гл. 19, п.19.4. М., Наука 1974.
8. Квалификационные требования КТ-253 «Бортовое оборудование ГНСС/ЛККС». Редакция 1. 2007.
9. Котик М.Г. Динамика взлета и посадки самолетов. М., Машиностроение, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ И ПРИ ДВИЖЕНИИ ПОСЛЕ ПРИЗЕМЛЕНИЯ | 2011 |
|
RU2465652C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |


Изобретение относится к области посадки летательных аппаратов (ЛА) на взлетно-посадочную полосу (ВПП) и может быть эффективно использовано для аэропортов с большой интенсивностью движения. Способ заключается в том, что после выбора ВПП для каждой из них рассчитывают заданную траекторию захода на посадку исходя из высоты прохождения ЛА заданного расстояния от входного торца взлетно-посадочной полосы. Формируют уточненное защитное пространство для каждой ВПП на основе допустимых углов наклона заданных траекторий захода на посадку для данного типа ЛА, подтверждают выбор каждой ВПП для захода на посадку и, в случае подтверждения этого выбора, осуществляют упомянутые определение положения и ориентации ЛА по отношению к выбранным ВПП, контроль выполнения условий оповещения и формирование оповещения о выборе взлетно-посадочных полос. Достигается повышение надежности посадки ЛА. 2 з.п. ф-лы, 6 ил.
1. Способ оповещения о расположении летательного аппарата относительно взлетно-посадочных полос при заходе на посадку, состоящий в том, что последовательно производят прием информации о параметрах динамического состояния летательного аппарата от его бортовых датчиков, на основе упомянутой информации и аэронавигационной базы данных определяют ближайшие взлетно-посадочные полосы, формируют защитные пространства для ближайших взлетно-посадочных полос и выбирают взлетно-посадочные полосы для захода на посадку, контролируют снижение летательного аппарата до граничной высоты над каждой выбранной взлетно-посадочной полосой, для взлетно-посадочных полос, над которыми при снижении летательного аппарата не достигнута граничная высота, последовательно определяют положение и ориентацию летательного аппарата по отношению к выбранным взлетно-посадочным полосам, контролируют выполнение условий оповещения о выборе взлетно-посадочных полос и в случае выполнения этих условий формируют упомянутое оповещение, причем действия способа непрерывно полностью повторяют до момента снижения s летательного аппарата до упомянутой граничной высоты над каждой выбранной взлетно-посадочной полосой и в указанный момент прекращают формирование оповещения о выборе взлетно-посадочных полос, отличающийся тем, что после выбора взлетно-посадочных полос для каждой из них рассчитывают заданную траекторию захода на посадку, исходя из высоты прохождения летательным аппаратом заданного расстояния от входного торца взлетно-посадочной полосы, формируют уточненное защитное пространство для каждой взлетно-посадочной полосы на основе допустимых углов наклона заданных траекторий захода на посадку для данного типа летательного аппарата, подтверждают выбор каждой взлетно-посадочной полосы для захода на посадку и в случае подтверждения этого выбора осуществляют упомянутые определение положения и ориентации летательного аппарата по отношению к выбранным взлетно-посадочным полосам, контроль выполнения условий оповещения и формирование оповещения о выборе взлетно-посадочных полос, при этом после приема информации от бортовых датчиков параллельно и непрерывно проводят формирование прогнозируемой траектории методом линейной аппроксимации пройденной на переменном интервале времени траектории, причем вычисление величины упомянутого интервала времени непрерывно производят на основе определения по информации от бортовых датчиков параметров турбулентности атмосферы, параметров динамического состояния летательного аппарата, а также данных о динамических возможностях летательного аппарата и характеристиках точности бортовых датчиков, а после проведения контроля снижения летательного аппарата до граничной высоты над каждой выбранной взлетно-посадочной полосой формируют в случае выбора только одной взлетно-посадочной полосы сигнал, по которому параллельно и непрерывно с учетом заданной траектории, данных о динамических возможностях летательного аппарата и характеристиках точности бортовых датчиков определяют пространственную зону допустимых отклонений от заданной траектории, затем вычисляют текущие отклонения летательного аппарата от заданной траектории, также по упомянутому сигналу проводят определение прогнозируемой точки посадки путем продления аппроксимированной траектории до пересечения с горизонтальной плоскостью, проходящей через середину входного торца взлетно-посадочной полосы, затем вычисляют отклонение прогнозируемой точки посадки от заданной точки посадки, также по упомянутому сигналу вычисляют параметры зоны допустимых отклонений прогнозируемой точки посадки от заданной точки посадки, при этом в случае отсутствия подтверждения выбора взлетно-посадочных полос, а также в случае невыполнения условий упомянутого оповещения о выборе взлетно-посадочных полос формируют предупреждение о недопустимых отклонениях летательного аппарата от заданной траектории и прогнозируемой точки посадки от заданной точки посадки.
2. Способ по п.1, отличающийся тем, что предупреждение об отклонении летательного аппарата от заданной траектории формируют посредством отображения на экране индикатора прямоугольного сечения пространства в вертикальной плоскости, причем центр прямоугольного сечения соответствует текущему положению летательного аппарата, площадь прямоугольного сечения разделена на девять прямоугольных областей, одна из которых является центральной и характеризуется границами, соответствующими допустимым отклонениям от заданной траектории, а восемь областей, окружающих центральную, разграничены в соответствии с характером недопустимых отклонений от заданной траектории по вертикали и горизонтали.
3. Способ по п.1, отличающийся тем, что предупреждение об отклонении прогнозируемой точки посадки от заданной точки посадки формируют посредством отображения на экране индикатора прямоугольной горизонтальной проекции участка поверхности, проходящей через центр входного торца взлетно-посадочной полосы, в центре которой находится заданная точка посадки и эллипс, ограничивающий зону допустимых отклонений прогнозируемой точки посадки от заданной точки посадки, при этом пространство вокруг упомянутой зоны допустимых отклонений прогнозируемой точки посадки разделено на десять областей, пять областей из которых расположены выше, а пять областей расположены ниже средней линии, причем каждая из областей отражает характер недопустимых отклонений прогнозируемой точки посадки от заданной точки посадки.
| WO 2007080313 A1, 19.07.2007 | |||
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| RU 97111597 A, 27.05.1999 | |||
| US 5593114 A, 14.01.1997 | |||
| ВСПОМОГАТЕЛЬНОЕ ПОСАДОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2184993C2 |

