ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] В этой заявка заявлен приоритет по дате подачи заявки на патент США №13/828942, поданной 14 марта 2013 года, и под названием “Flow Measurement Systems and Methods for Gas and Liquid Applications”, которая включена в данный документ в полном объеме посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Изобретение относится к системе и способу измерения фаз звуковых волн. В частности, данное изобретение относится к системе и способу измерения наложения множества звуковых волн при их распространении через текучую среду внутри канала.
УРОВЕНЬ ТЕХНИКИ
[0003] Существуют множество известных технологий для измерения параметров потока внутри канала путем измерения скоростей в области сильного и слабого поля распространяющейся звуковой волны. Тем не менее, эти известные способы неэффективны, если звуковые волны области сильного поля не могут быть отделены от звуковых волн области слабого поля.
[0003] В последнее время были предложены несколько отличающиеся подходы для устранения ограничений, которые содержаться в общепринятых технологиях измерения параметров потока для моделирования звуковых волн внутри канала. Один из таких подходов описан в патенте США №7725270. Согласно этому подходу, предполагается, что измеренная звуковая волна является свободной (отделенной) звуковой волной, распространяющейся линейно. Таким образом, этот подход игнорирует факт, что звуковые волны на самом деле связаны каналом и что звуковые волны распространяются в трех измерениях. Путем упрощения моделирования звуковых волн может быть получена только приблизительная модель потока звуковых волн.
[0004] Таким образом, существует необходимость в данной области техники для системы и способа, которые способны точно измерять скорость потока текучей среды и скорость звука внутри канала. Кроме того, существует необходимость в данной области техники для системы и способа, которые способны точно моделировать фазы звуковых волн, распространяющихся в текучей среде внутри канала, учитывая наличие канала. Кроме того, существует необходимость в данной области техники для системы и способа, которые способны точно моделировать наложение множества звуковых волн при их распространении в текучей среде внутри канала.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] В одном варианте реализации изобретение содержит систему для измерения наложения множества звуковых волн, распространяющихся внутри канала, содержащего текучую среду. В этом варианте реализации изобретения канал имеет внешнюю поверхность, а текучая среда протекает через канал в направлении потока. В одном аспекте изобретения, множество звуковых волн содержат по меньшей мере две звуковые волны.
[0006] В одном аспекте изобретения, система для измерения наложения множества звуковых волн содержит множество датчиков, расположенных по существу параллельно направлению потока вдоль внешней поверхности канала. В дополнительном аспекте изобретения система для измерения наложения множества звуковых волн содержит средство для моделирования наложения множества звуковых волн при их распространении внутри канала.
[0007] В еще одном аспекте изобретения, средство для моделирования наложения множества звуковых волн сконфигурировано для приема набора данных от каждого датчика, которые являются показателем скорости потока текучей среды через канал, и скорости, с которой звуковые волны проходят через текучей среду. Помимо хранения выбранного количества наборов данных, средство для моделирования наложения множества звуковых волн сконфигурировано для обработки массива наборов данных для дальнейшей выработки модели наложения множества звуковых волн при их распространении внутри канала. В одном аспекте изобретения, средство для моделирования наложения множества звуковых волн обрабатывает массив наборов данных путем выполнения одномерного быстрого преобразования Фурье массива наборов данных. В этом аспекте изобретения, средство для моделирования наложения множества звуковых волн может использовать результаты одномерного быстрого преобразования Фурье для генерирования нормированного сигнала временной области для каждого соответствующего датчика. Средство для моделирования наложения множества звуковых волн может затем создать двумерную матрицу временной и пространственной области на основе массива наборов данных и нормированных сигналов временной области каждого датчика. Средство для моделирования наложения множества звуковых волн, может затем выполнить двумерное быстрое преобразование Фурье двумерной матрицы временной и пространственной области. Результаты двумерного быстрого преобразования Фурье, затем могут быть коррелированны с волновым уравнением, которое моделирует наложение множества звуковых волн. На основании этой корреляции может быть определена скорость звуковых волн по направлению и против потока текучей среды. На основе полученной скорости звуковых волн по направлению и против потока жидкости, скорость потока текучей среды и скорость звука внутри канала могут быть определены.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Эти и другие особенности предпочтительных вариантов осуществления изобретения станут более очевидными в подробном описании, в котором дана ссылка на прилагаемые графические материалы, где:
[0009] Фигура 1 иллюстрирует перспективный вид множества датчиков, расположенных вдоль внешней поверхности канала, как описано здесь.
[0010] Фигура 2 иллюстрирует увеличенный перспективный вид множества датчиков, расположенных вдоль внешней поверхности канала, как описано здесь.
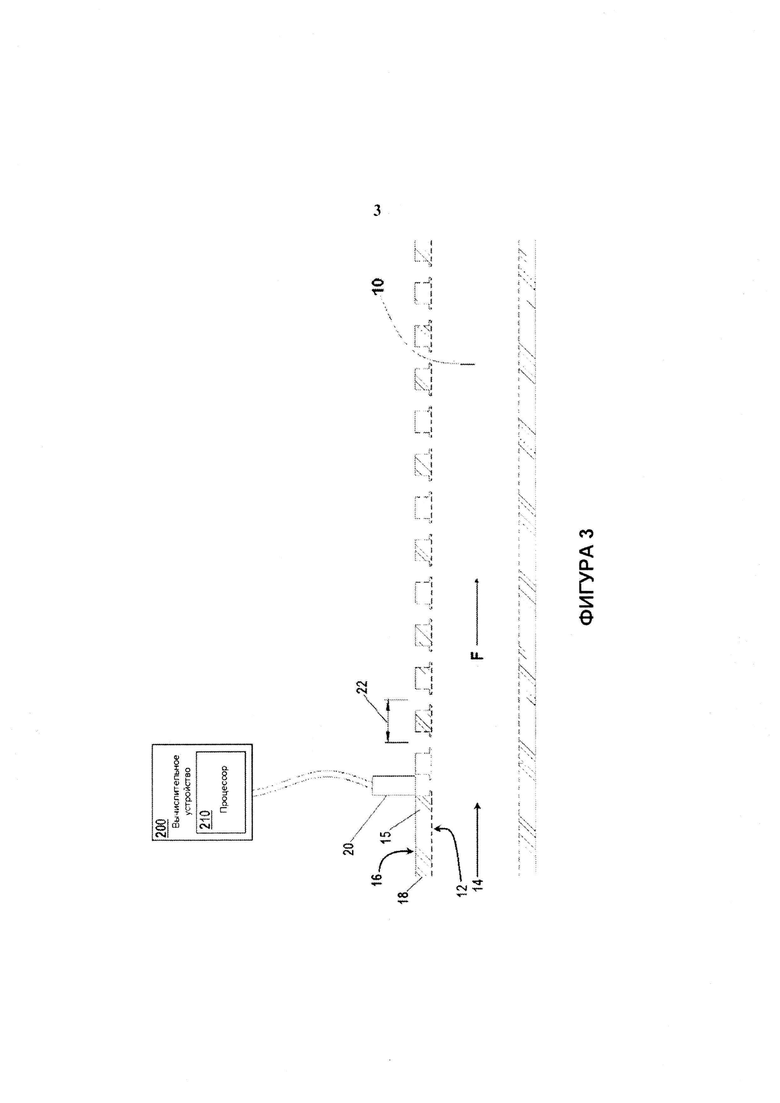
[0011] Фигура 3 иллюстрирует поперечное сечение бокового вида канала, изображающее расстояние между соответствующими датчиками из множества датчиков. Фигура 3 также схематически иллюстрирует связь между процессором и множеством датчиков, как описано здесь.
[0012] На Фигуре 4 проиллюстрирован типовой способ определения нормированного сигнала временной области на соответствующем датчике из множества датчиков, как описано в данном документе.
[0013] Фигура 5 иллюстрирует типовой способ создания двумерной матрицы данных временной и пространственной области, полученных с помощью множества датчиков и посредством применения двумерного быстрого преобразования Фурье двумерной матрицы временной и пространственной области.
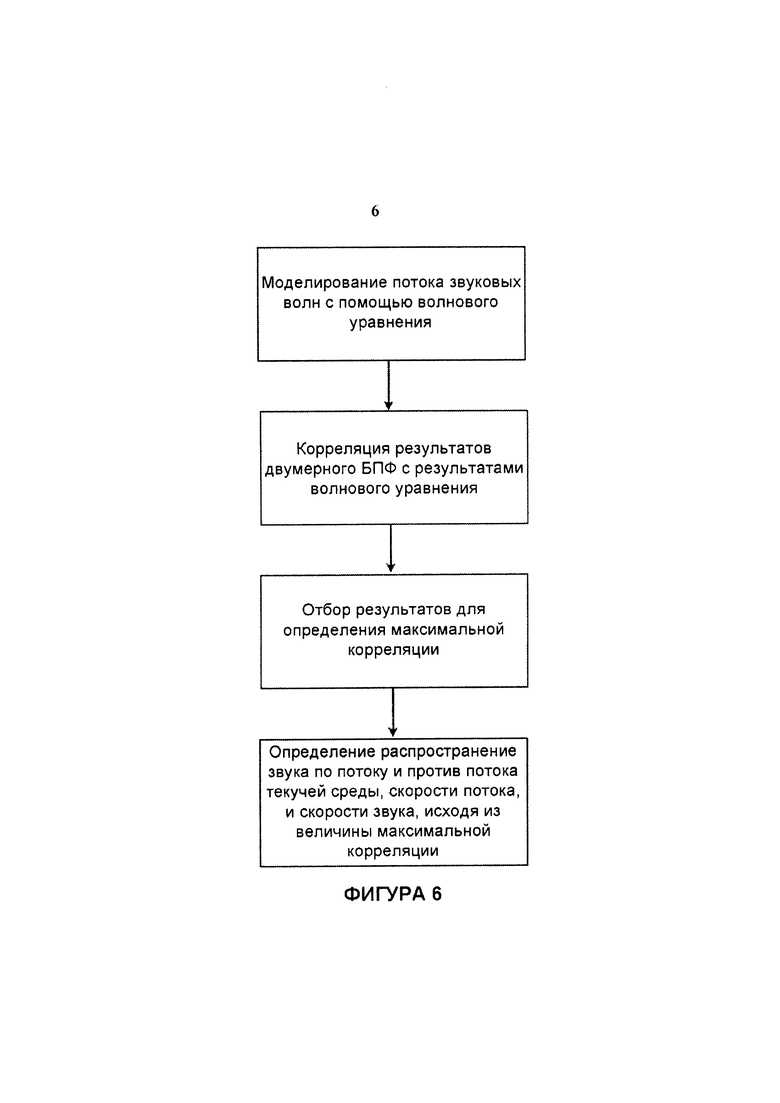
[0014] Фигура 6 иллюстрирует типовой способ корреляции данных, полученных с помощью двумерного быстрого преобразования Фурье, к уравнению модели потока для распространяющихся как слева-направо, так и справа-налево волн, как описано здесь. Фигура 6 также иллюстрирует использование результатов корреляции для определения распространения звука по направлению и против потока текучей среды, скорости потока жидкости и скорости звука в текучей среде внутри канала.
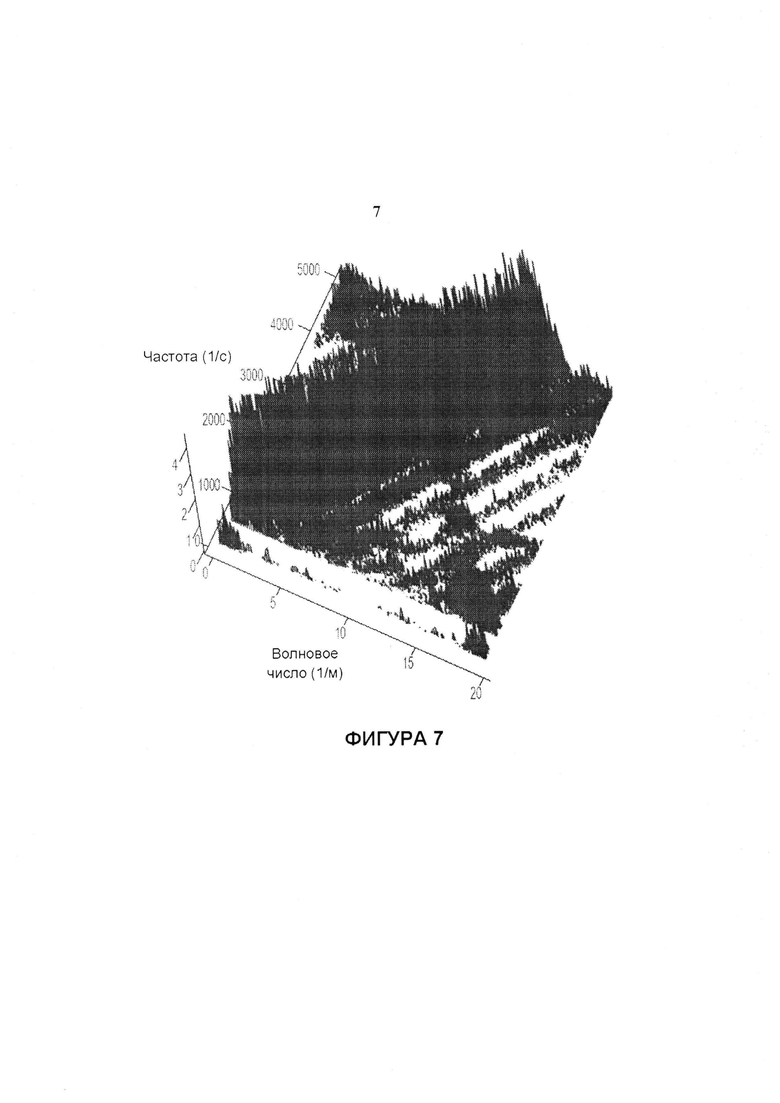
[0015] Фигуры 7-9 иллюстрируют экспериментальные применение описанных здесь способов с целью смоделировать распространение звуковых волн слева-направо. Фигура 7 иллюстрирует двумерное быстрое преобразование Фурье звуковых волн. Фигура 8 иллюстрирует теоретическое поверхностное изображение звуковой волны. Фигура 9 иллюстрирует контурное изображение Фигуры 7.
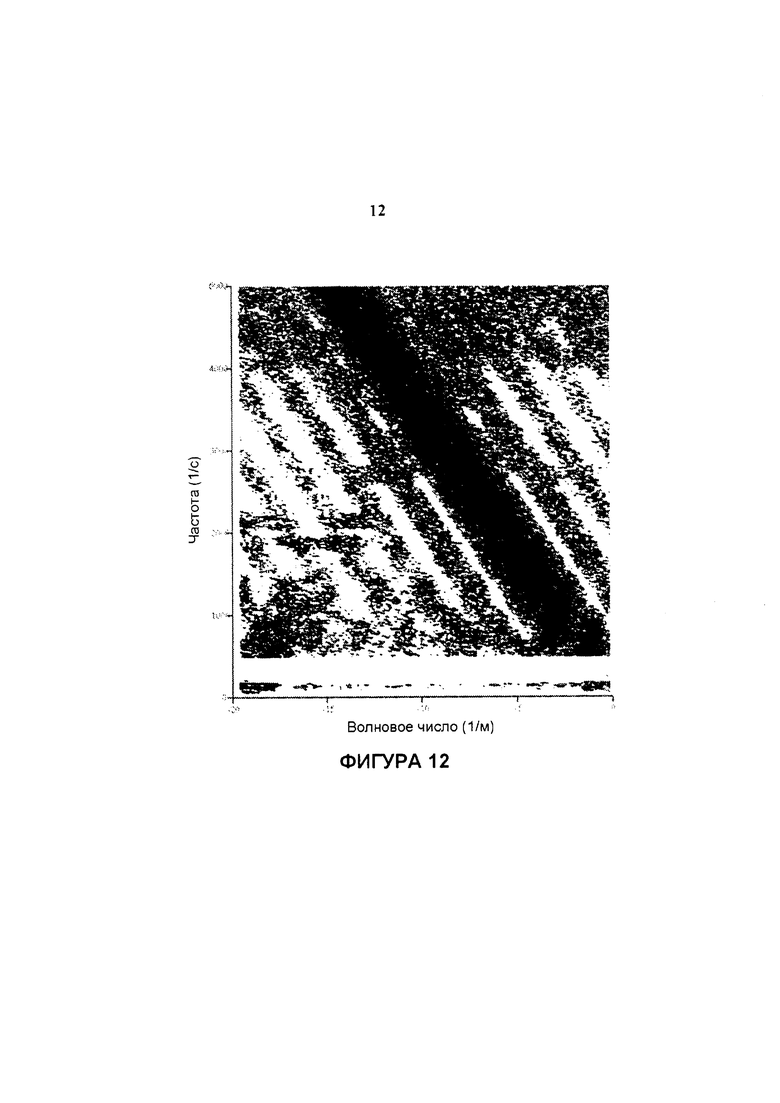
[0016] Фигуры 10-12 иллюстрируют экспериментальные применение описанных здесь способов с целью смоделировать распространение звуковых волн справа-налево. Фигура 10 иллюстрирует двумерное быстрое преобразование Фурье звуковых волн. Фигура 11 иллюстрирует теоретическое поверхностное изображение звуковой волны. Фигура 12 иллюстрирует контурное изображение Фигуры 10.
[0017] Фигуры 13-15 иллюстрируют экспериментальное применение описанных здесь способов, с целью смоделировать распространение звуковых волн в обоих направлениях (слева-направо и справа-налево). Фигура 13 иллюстрирует двумерное быстрое преобразование Фурье звуковых волн. Фигура 14 иллюстрирует теоретическое поверхностное изображение звуковой волны. Фигура 15 иллюстрирует контурное изображение Фигуры 13.
[0018] Фигуры 16, 17 иллюстрируют корреляционную информацию, соответствующую данным двумерного быстрого преобразования Фурье, Фигуры 13, с использованием способов, как описано здесь. Фигура 16 иллюстрирует поверхностное изображение, в то время как Фигура 17 иллюстрирует контурное изображение.
[0019] Фигуры 18, 19 иллюстрируют корреляционную информацию, связанную с текучей средой, имеющей скорость потока 5,5 м/с и скорость звука 347 м/с, с применением способов, как здесь описано. Фигура 18 иллюстрирует поверхностное изображение, в то время как Фигура 19 иллюстрирует контурное изображение.
[0020] Фигуры 20, 21 иллюстрируют корреляционную информацию, связанную с текучей средой, имеющей скорость потока 9,0 м/с и скорость звука 347 м/с, с использованием способов, как здесь описано. Фигура 20 иллюстрирует поверхностное изображение, в то время как Фигура 21 иллюстрирует контурное изображение.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Настоящее изобретение может быть более легко понято посредством ссылки на последующее подробное описание, примеры, графические материалы и формулы изобретения, а также их предыдущего и следующего описания. Однако прежде чем настоящие средства, системы и/или способы будут раскрыты и описаны, должно пониматься, что данное изобретение не ограничивается конкретными средствами, системами и/или способами, описанными здесь, если не задано иное, и как таковое может меняться. Также следует понимать, что терминология, используемая в настоящем документе, имеет целью описания конкретных аспектов изобретения и не может быть ограничена.
[0022] Следующее описание настоящего изобретения дано в качестве инновационного описания изобретения в его лучшем, известном в настоящее время, варианте реализации. В этой связи, специалистам в данной области техники будет очевидно и принято, что в различных аспектах описанного здесь изобретения могут быть внесены многие изменения, которые также будут обеспечивать эффект настоящего изобретения. Также будет очевидно, что некоторые из желаемых эффектов настоящего изобретения могут быть получены путем отбора некоторых из признаков настоящего изобретения, исключая применение других признаков. Соответственно для тех, кто работает в данной области техники, будет очевидно, что многие модификации и внедрения в настоящее изобретение возможны и даже могут быть желательными при определенных обстоятельствах и являются частью настоящего изобретения. Таким образом, следующее описание приводится в качестве иллюстрации принципов настоящего изобретения, а не с целью его ограничения.
[0023] В данном тексте форма единственного числа также подразумевает и множественное число, если из контекста явно не следует иное. Так, например, ссылка на «один датчик» может подразумевать два или более таких датчиков, если из контекста не следует иное.
[0024] Диапазоны могут быть представлены здесь как от “около” одного конкретного значения и/или до “около” другого конкретного значения. При таком представлении диапазонов, другой вариант представляется от одного конкретного значения и/или до другого конкретного значения. Аналогичным образом, когда значения представлены как приближения, с использованием антецедента “около”, следует понимать, что конкретное значение формирует еще один вариант представления. Далее будет пониматься, что конечные точки каждого из диапазонов являются значимыми как по отношению к другой конечной точке, так и независимо от другой конечной точки.
[0025] В данном контексте термины “дополнительный” или “дополнительно” означает, что далее описанное событие или обстоятельство может произойти, а может и не произойти, и что описание включает случаи, когда указанное событие или обстоятельство происходит и случаи, когда не происходит.
[0026] В данном контексте термин “текучая среда” может относиться к газу, жидкости и их смеси.
[0027] В одном варианте осуществления изобретения, и со ссылкой на Фигуры 1-3, описана система 100 для измерения распространения по меньшей мере одной звуковой волны внутри канала 10, содержащего текучую среду. В типовых аспектах изобретения по меньшей мере одна звуковая волна может содержать множество звуковых волн, а система 100 может быть сконфигурирована для измерения наложения множества звуковых волн, распространяющихся внутри канала 10. В этом варианте реализации изобретения, и, как показано на Фигуре 3, канал 10 может иметь внутреннюю поверхность 12 и внешнюю поверхность 16. Предполагается, что внутренняя поверхность 12 канала 10 может ограничивать собой внутренний диаметр отверстия 14, который выполнен с возможностью приема текучей среды. Кроме того, предполагается, что текучая среда может протекать через проход 14 канала 10 в направлении потока F. В одном аспекте изобретения множество звуковых волн может содержать две звуковые волны (первую звуковую волну, а вторую звуковую волну).
[0028] В одном аспекте изобретения система 100 для измерения распространения по меньшей мере одной звуковой волны может содержать средство для генерирования по меньшей мере одной звуковой волны. В этом аспекте изобретения, средство для генерирования по меньшей мере одной звуковой волны может содержать любое средство, общеизвестное в данной области, для получения звуковой волны в текучей среде. Как пример, но не ограничиваясь им, предполагается, что средство для генерирования по меньшей мере одной звуковой волны может содержать по меньшей мере один репродуктор или другое вибрирующее устройство. Однако, как будет понятно для среднего специалиста в данной области техники, предполагается, что по меньшей мере одна звуковая волна может быть сгенерирована с помощью текучей среды, протекающей через канал. Кроме того, предполагается, что по меньшей мере одна звуковая волна может включать звуковые волны, возникающие вследствие случайного звука или шума окружающей среды.
[0029] В другом аспекте изобретения, система 100 для измерения распространения по меньшей мере одной звуковой волны может содержать множество датчиков 20, соединенных с каналом 10 таким образом, что множество датчиков располагаются по существу параллельно направлению потока F вдоль по меньшей мере одной части внешней поверхности 12 канала 10. В типовых аспектах изобретения, множество датчиков 20 могут быть надежно соединены с внешней поверхностью 12 канала 10. Однако, как показано на Фигуре 3, в других типовых аспектах изобретения предполагается, что множество датчиков 20 могут быть закреплены на стенке 15 канала 10 таким образом, что множество датчиков расположены в коммуникации посредством текучей среды с отверстием 14 канала. В других типовых аспектам изобретения предполагается, что множество датчиков 20 могут быть надежно соединены с внутренней поверхностью 12 канала 10 таким образом, что множество датчиков находятся в коммуникации посредством текучей среды с отверстием 14 канала. Предполагается, что часть канала 10, вдоль которого расположены множество датчиков 20, может иметь любую подходящую длину в продольном направлении для конкретного применения.
[0030] В типовых аспектах изобретения, каждый датчик 20 из множества датчиков может быть настроен на получение данных, являющихся признаком наличия звуковой волны в пределах нормальной акустической области (от около 0 до около 20 кГц). В этих аспектах изобретения, каждый датчик 20 из множества датчиков может содержать средство для определения скорости потока текучей среды через канал 10 в направлении потока F. В типовых аспектах изобретения, предполагается, что средство для измерения скорости потока текучей среды через трубопровод 10 может содержать стандартный датчик потока.
[0031] Кроме того, каждый датчик 20 из множества датчиков может дополнительно содержать средство для определения скорости, при которой по меньшей мере одна звуковая волна распространяется через текучую среду. В типовых аспектах изобретения, предполагается, что каждый датчик 20 может содержать микрофон для обнаружения звука внутри канала 10 вблизи датчика. В других типовых аспектам изобретения, предполагается, что каждый датчик 20 может содержать оптико-акустического средство, выполненное с возможностью обнаружения звука внутри канала вблизи датчика. В дополнительных типовых аспектах изобретения, предполагается, что множество датчиков 20 могут быть выполнены с возможностью обнаружения одной или более звуковых волн внутри канала через стенку 15 канала.
[0032] В дополнительном аспекте изобретения каждый датчик 20 из множества датчиков может находиться на расстоянии от соседнего датчика относительно направления потока F. В этом аспекте изобретения, каждый датчик 20 из множества датчиков может размещаться с промежутками относительно заданной точки отсчета 18 на внешней поверхности 16 канала 10. В этом аспекте изобретения, размещение с промежутками может соответствовать расстоянию в продольном направлении между датчиком 20 и точкой отсчета 18.
[0033] Предполагается, что каждый датчик 20 из множества датчиков может быть выполнен с возможностью обнаружения звуковых волн, распространяющихся внутри канала 10 линейно относительно потока текучей среды внутри канала. Дополнительно предполагается, что каждый датчик 20 из множества датчиков может быть настроен также на обнаружение звуковых волн, отличающихся от тех, которые распространяются внутри канала 10, в том числе, как пример, но не ограничиваясь им, шума окружающей среды.
[0034] Как было сказано выше, дополнительно предполагается, что система 100 может быть использована для анализа по меньшей мере одной звуковой волны для определения звуковых волн, которые требуются для измерения скорости потока и скорости звука внутри канала 10. В одном аспекте изобретения множество датчиков 20 могут содержать, как пример, но не ограничиваясь им, электретные датчики, пьезоэлектрические датчики, оптоволоконные датчики, лазерные датчики, жидкие датчики, датчики микроэлектрической механической системы (МЭМС), и тому подобное. Тем не менее, предполагается, что любой датчик, который способен обнаруживать звуковую волну и преобразовывать звуковую волну в электрический сигнал, может быть использован в системе 100, описанной здесь.
[0035] В дополнительном аспекте изобретения система 100 для измерения распространения по меньшей мере одной звуковой волны может содержать средство для моделирования наложения множества звуковых волн при их распространении внутри канала 10. В этом аспекте изобретения, средство для моделирования наложения может быть связано с каждым датчиком 20 из множества датчиков. Дополнительно к описанному здесь моделированию наложения множества звуковых волн, предполагается, что средство для моделирования наложения также может быть использовано для моделирования потока одной звуковой волны внутри канала 10.
[0036] В дополнительном аспекте изобретения, средство для моделирования наложения множества звуковых волн может быть сконфигурировано для приема набора данных в виде сигнала временной области из каждого датчика 20, являющегося показателем измеренной скорости потока текучей среды через канал 10 в направлении потока F, и скорости, при которой звуковые волны распространяются в текучей среде. В данном контексте, термин “сигнал временной области” относится к сигналу, полученному с помощью датчика 20 в динамике по времени, что указывает на наличие звуковых волн, распространяющихся внутри канала. Как можно заключить, сигнал временной области отличим от сигнала пространственной области. Например, синусоида может распространяться во времени в соответствии с уравнением sin(2пft) (временная область) или в пространстве в соответствии с уравнением sin(2пkx).
[0037] В дополнительном аспекте изобретения, средство для моделирования наложения множества звуковых волн может быть сконфигурировано для назначения переменных позиционирования для набора данных, что указывает на размещение в определенном месте датчика 20, который сгенерировал набор данных. В еще одном аспекте изобретения, средство для моделирования наложения множества звуковых волн может быть сконфигурировано для хранения массива наборов данных и соответствующих им значения позиции. Предполагается, что массив наборов данных может использоваться для определения скорости множества звуковых волн и скорости текучей среды в заданном положении (соответствующему положению конкретного датчика). Дополнительно предполагается, что при хранении выбранного числа наборов данных, средство для моделирования наложения может быть сконфигурировано для обработки массива наборов данных для выработки модели наложения множества звуковых волн при их распространении внутри канала 10.
[0038] В одном аспекте изобретения, предполагается, что каждая звуковая волна из множества звуковых волн может быть сгенерирована в любой позиции внутри канала 10, не влияя на функциональность системы 100, описанной здесь. Кроме того, предполагается, что фаза, частота и амплитуда каждой звуковой волны из множества звуковых волн не влияет на функциональные возможности системы 100, описанной здесь.
[0039] Подразумевается, что волна, распространяющаяся внутри канала, ограничена этим каналом. Таким образом, как здесь описано, для того чтобы точно смоделировать такую волну, необходимо выполнить точные граничные условия. Из-за того, что невозможно устранить шум окружающей среды, обычная практика требует разделения двух различных фазовых составляющих волны, распространяющейся внутри канала. Однако, как описано более подробно ниже, способы и модели, описанные здесь, не требуют разделения волн, распространяющихся слева-направо и справа-налево.
[0040] Описанные способы и модели частично основаны на предположении, что звуковые волны, распространяющиеся внутри канала 10, распространяются во внутрь и наружу, неограниченные в трех измерениях согласно следующему уравнению:
где ∇2Ψ представляет собой оператор Лапласа волнового уравнения Ψ,

[0041] Принимая во внимание, что волна ограничивается каналом цилиндрической формы, уравнение может быть представлено в цилиндрических координатах. Так как поток слева-направо и справа-налево может быть отделен только на оси z (параллельно направлению потока F), следующее уравнение используется для представления двух других координат (r и ф):

[0042] Приведенное выше уравнение может быть разделено следующим образом:

[0043] Если рассматривается сепарабельное решение, где R(r) представляет собой связную радиальную составляющую волны, Ф(ф) представляет собой угловое смещение волны внутри канала цилиндрической формы, и P(z,t) представляет собой неограниченную распространяющуюся волну, тогда может быть использовано следующее уравнение:
Ψ(r,z,t)=R(r)Ф(ф)P(z,t).
[0044] Волновое уравнение теперь можно свести к следующему:

где m представляет собой произвольную постоянную, которая применяется в разделении переменной ф.
[0045] Решение для волны углового смещения может быть найдено на основе следующего уравнения:
Ф(ф)=eimф.
[0046] Граничные условия управляют непрерывной волной, следовательно, m=0, ±1, ±2, и т.д. Как дополнительно описано ниже, для экспериментальных данных можно предположить, что m=0, так как волна распространяется по существу без вращательной составляющей. Таким образом, волновое уравнение может быть сведено к следующему виду:

[0047] Новая постоянная А в следующем виде может быть преобразована:
[0048] Это уравнение с целью дальнейшего разделения переменной может быть переписано следующим образом:

[0049] Если предположить, что распространяющаяся волна не имеет угловой составляющей, и m=0, то уравнение можно переписать в виде цилиндрической функции Бесселя:

[0050] Это уравнение имеет решение цилиндрической функции Бесселя первого рода (J0) нулевого порядка (так как m=0):
R(r)=J0(Ar).
[0051] Несвязанная часть волны, которая может распространяться слева-направо и справа-налево, может быть отражена с помощью оставшейся части волнового уравнения:

[0052] Как было указано ранее, волновое уравнение было составлено с предположением, что волны распространяются слева-направо и справа-налево в одно и то же время (внутрь и наружу в трех измерениях). Тем не менее, можно разделить уравнение на форму «слева-направо» и форму «справа-налево» с целью отразить обе волновые составляющие. Основная форма уравнения до объединения составляющих слева направо и справа налево может быть представлена следующим образом:

[0053] Таким образом, дифференциальный оператор в частных производных может быть разделен на две составляющие, составляющая слева-направо 


[0054] Таким образом, для волны, распространяющейся справа-налево, существует следующее решение
PRL(z,t)=e2πi(ft+kx),
где k представляет собой волновое число (или 1/длина волны).
[0055] Если дифференциальное уравнение с частными производными для справа налево разложено, и решение справа-налево замещено, тогда получаем следующее уравнения:

[0056] После проведения операции над дифференциальными операторами с частными производными, имеем следующее уравнение:

[0057] Это уравнение может быть сведено к следующему:
[0058] Дальнейшее упрощение уравнения приводит к решению для постоянной А:

где 

[0059] Предполагается, что, поскольку функция Бесселя является четной функцией, форма уравнения не влияет на результат. Например, как показано ниже, решение дифференциального оператора с частными производными для новой постоянной А для справа-налево может быть такое же, как и решение дифференциального оператора с частными производными для постоянной А для слева-направо.

[0060] Путем подстановки отдельных решений в уравнение суммарной волны, приходим к тому, что решение для связанной волны, распространяющейся слева направо, представлено следующим образом:

где N представляет собой составляющую амплитуды.
[0061] Аналогично форма решения для связанной волны, распространяющейся справа налево, может быть представлена следующим образом:

[0062] Экспериментальная проверка подтвердила, что это волновое уравнение по существу точно моделирует временную и пространственную области захвата звуковой волны внутри канала с помощью двумерного акустического массива, такого как множество датчиков, описанных здесь. Составляющая калибровки Mcal может быть добавлена для получения точных экспериментальных данных:


[0063] Затем может быть отражено граничное условие для стенки канала. Принимая во внимание, что скорость волны может быть определена как 

[0064] Корни первой производной этой функции Бесселя нулевого порядка можно найти численно. Первые шесть корней (ζi) приведены в Таблице 1, которая представлена ниже.

[0065] Предшествующее описание показывает, что существует более одного диагонального результата от двумерного быстрого преобразования Фурье (двумерного БПФ). Это противоречит идее известных систем, таких как система, описанная в патенте США 7725270, которая утверждает, что есть только один диагональный спектр в двумерном БПФ, соответствующий следующему 
[0066] Принимая во внимание, что rw представляет собой фиксированный радиус канала цилиндрической формы, следующие уравнения применяются для моделирования распространения звука внутри канала цилиндрической формы:


[0067] В одном аспекте изобретения, множество звуковых волн может содержать первую звуковую волну и вторую звуковую волну. В этом аспекте изобретения первая звуковая волна может распространяться в направлении потока, а вторая звуковая волна может распространяться в противоположном к потоку направлении. Предполагается, что первая звуковая волна и вторая звуковая волна могут быть смоделированы с помощью приведенного выше волнового уравнения, которое принято называть как уравнение “связанной распространяющейся разделительной модели для канала (CBPSM)”.
[0068] В типовых аспектах изобретения средство для моделирования наложения множества звуковых волн может содержать вычислительное средство, имеющее процессор. В этом аспекте изобретения, процессор может содержать аналого-цифровой преобразователь для обработки наборов данных, полученных с помощью множества датчиков 20. Как показано на Фигуре 3, предполагается, что процессор вычислительного средства может находиться в оперативной связи с каждым датчиком 20 из множества датчиков, так что процессор (и аналого-цифровой преобразователь) выполнен с возможностью приема множества данных, собранных каждым соответствующим датчиком. Процессор может находиться в оперативной связи с множеством датчиков 20 посредством любого обычного средства связи, включая проводные и беспроводные электронные соединения. В другом аспекте изобретения, процессор (и, дополнительно, аналого-цифровой преобразователь) может обрабатывать наборы данных со скоростью отбора проб.
[0069] В одном типовом аспекте изобретения, но не ограничиваясь им, для того, чтобы адекватно смоделировать звуковые волны посредством волнового уравнения, множество датчиков 20 может содержать 2N датчиков, где N больше или равно 3, больше или равно 4 и, желательно, больше или равно 5. Однако предполагается, что система 100 может функционировать, как описано здесь, только лишь с двумя датчиками. В одном аспекте изобретения множество датчиков 20 может содержать 32 датчика (N=5). В другом аспекте изобретения, множество датчиков 20 может содержать 64 датчика (N=6). В еще одном аспекте изобретения множество датчиков 20 может содержать 128 датчиков (N=7). В дополнительном аспекте изобретения, множество датчиков 20 может содержать 256 датчиков (N=8). Предполагается, что точность специальной составляющей модели может быть повышена путем увеличения количества датчиков в системе. Кроме того, предполагается, что точность временной составляющей модели может быть увеличена за счет получения дополнительных данных от множества датчиков 20.
[0070] В типовых аспектах изобретения, предполагается, что размер и размерность матрицы первичных преобразователей могут быть определены с учетом нескольких факторов, в том числе, как пример, но не ограничиваясь ими, скорость отбора проб (SR) процессора для временной области, которая определяет максимальную частоту (fmax=SR/2), на которой могут быть получены наборы данных, расстояние между соседними датчиками (zmin), и скорость распространения (с) по меньшей мере одной волны. Предполагается, что максимальное волновое число (kmax=1/(2min)) может быть обратным по отношению к расстоянию между соседними датчиками. Дополнительно предполагается, что основная диагональ в 2d-FFT может идеально подходить в пределах всей области со скоростью звука (CSOS) текучей среды.
[0071] В дополнительном аспекте изобретения, каждый датчик 20 из множества датчиков может быть размещен с промежутками по отношению с соседними датчиками величиной разделительного отрезка (zmin). В этом аспекте изобретения, разделительный отрезок (zmin) датчиков 20 может быть связан со скоростью отбора проб (SR) процессора (аналого-цифровой преобразователь) и скорости (cSOS), при которой множество звуковых волн распространяются в текучей среде. Отношение между скоростью отбора проб, разделительным отрезком и скоростью звуковых волн может быть представлено следующим уравнением:

[0072] Используя эти отношения, и со ссылкой на Фигуру 3, составляющие системы 100 могут быть использованы для вычисления соответствующей разделительного отрезка 22 датчиков 20. В одном аспекте изобретения, разделительный отрезок 22 может находиться в пределах между около 0,0127 м (0,5 дюйма) и 0,0889 м (3,5 дюйма), более предпочтительно в пределах от около 0,0127 до 0,0762 м (1,0 до 3,0 дюйма), а наиболее предпочтительно в пределах от около 0,0381 до 0,0635 м (1,5 до 2,5 дюймов). В типовых аспектах изобретения, разделительный отрезок 22 может составлять около 0,0508 м (2 дюйма). Тем не менее, предполагается, что, чем больше датчиков 20 содержит система, тем меньше может быть разделительный отрезок 22. Дополнительно предполагается, что, чем короче часть внешней поверхности 16 канала 10, вдоль которой расположены датчики 20, тем меньше может быть разделительный отрезок 22. В частности, разделительный отрезок 22 может быть выборочно уменьшен с целью размещения дополнительных датчиков 20 и повышения точности модели, создаваемой системой 100. В другом аспекте изобретения, предполагается, что разделительный отрезок 22 может быть по существу обратно пропорционален скорости отбора проб. Таким образом, в этом аспекте изобретения, разделительный отрезок 22 будет пропорционально уменьшаться при увеличении скорости отбора проб. В частности, если множество звуковых волн содержат множество высокочастотных звуковых волн, скорость отбора проб может быть увеличена, тем самым приводя к уменьшению длины разделения. Кроме того, в то время как скорость звука, связанная с текучей средой внутри канала 10, уменьшается, разделительный отрезок 22 может быть пропорционально уменьшен.
[0073] Однако, предполагается, что скорость отбора проб может быть выше или ниже в зависимости от эффективности составляющих системы 100, а также от количества датчиков 20. Кроме того, предполагается, что скорость отбора проб может определяться с учетом максимальной частоты звука, распознаваемого внутри канала 10. В типовых аспектах изобретения, предполагается, что скорость отбора проб может быть ниже, чем около 40000 выборок в секунду.
[0074] Дополнительно, в другом аспекте изобретения, множество датчиков 20 могут быть съемно монтируемы на внешней поверхности 16 канала 10. Предполагается, что множество датчиков 20 могут быть установлены на внешней поверхности 16 с помощью любого обычного устройства, общеизвестного в данной области техники, такого как, например, но не ограничиваясь, всасывающее устройство, временные связующие элементы, зажимное устройство, устройство фиксации и тому подобное. В этом аспекте изобретения, множество преобразователей 20 могут быть взаимосвязаны с целью формирования по существу линейного массива датчиков. Предполагается, что по существу линейный массив датчиков 20 может позволять перемещение множества датчиков, сохраняя при этом требуемую длину разделения 22 между соседними датчиками.
[0075] В действии, способ применения системы, описанной здесь, может включать в себя позиционирование множества датчиков 20 по существу параллельно направлению потока F, как описано здесь. В типовых аспектах изобретения множество преобразователей 20 может быть расположено вдоль по меньшей мере части внешней поверхности 16 канала 10. В дополнительном аспекте изобретения, каждый датчик 20 из множества датчиков можно разместить с промежутками относительно заданной опорной точки на внешней поверхности канала 10.
[0076] В другом аспекте изобретения, способ может включать в себя прием по меньшей мере одного набора данных в виде сигнала временной области из каждого датчика 20, являющегося показателем измеренной скорости потока текучей среды через канал 10 в направлении потока F, и скорости, при которой звуковые волны распространяются через текучую среду. В дополнительном аспекте изобретения, способ может включать в себя назначение переменных позиционирования для каждого набора данных, что указывает на размещение датчика на определенной позиции, который сгенерировал набор данных и сигнал временной области. В дополнительном аспекте изобретения, способ может включать в себя хранение массива наборов данных и их соответствующих значений. В еще одном аспекте изобретения, способ может включать в себя обработку массива наборов данных для выработки модели наложения множества звуковых волн при их распространении внутри канала 10.
[0077] Предполагается, что поток по меньшей мере одной звуковой волны внутри канала может быть независимым от амплитуды. Таким образом, предполагается, что электронная/механическая амплитудная калибровка не должны быть крайне точной. Дополнительно предполагается, что, так как каждый сигнал временной области (и набора данных) захватывается датчиком, численная нормализация амплитуды может происходить таким образом, что любые расхождения между датчиками исключаются.
[0078] В другом аспекте изобретения, после получения сигналов временной области (наборы данных) из каждого соответствующего датчика, этап обработки массива наборов данных может включать в себя выполнение одномерного быстрого преобразования Фурье (1DFFT) каждого соответствующего сигнала временной области с целью определения реального и мнимого коэффициента для каждой частоты (Creal и Cimag). В дополнительном аспекте изобретения, используя следующее уравнение, для каждого датчика может быть получен нормализованной сигнал временной области:

где 
Ti = сигнал временной области, измеренный данным преобразователем в позиции (i) внутри канала,


fj = частота при данном положении датчика в (j).
[0079] В дополнительном аспекте, этап обработки массива наборов данных (сигналов временной области) может включать в себя формирование двумерной матрицы временной и пространственной областей на основе нормированных сигналов временной области, полученных для каждого соответствующего датчика, и горизонтального положения каждого соответствующего датчика. В еще одном аспекте изобретения, этап обработки массива наборов данных (сигналов временной области) могут включать в себя выполнение двумерного быстрого преобразования Фурье (двумерное БПФ) двумерной матрицы временной и пространственной области.
[0080] В другом аспекте изобретения, этап обработки массива наборов данных может включать в себя моделирование наложения множества звуковых волн с использованием волновых уравнений


где Ψ = фаза волны, движущейся справа-налево (RL) или слева-направо (LR) через канал,
rw = радиус канала,
z = горизонтальное положение волны, измеренное относительно направления потока текучей среды внутри канала,
t = время, прошедшее с момента генерирования волны,
N = амплитуда звуковой волны,
J0 = цилиндрическая функция Бесселя первого рода,
Mcal = коэффициент калибровки,
f = частота звуковых волн,
c = скорость звуковых волн внутри канала,
k = волновое число, связанное со звуковыми волнами.
[0081] В другом аспекте изобретения, этап обработки массива наборов данных может включать в себя сортировку данных двумерного БПФ и данных волнового уравнения с целью определения максимальной корреляции между данными двумерного БПФ и данными волнового уравнения. В этом аспекте изобретения, максимальная корреляция может быть определена путем подготовки трехмерной корреляционной карты поверхности и/или контурного изображения данных двумерного БПФ и данных волнового уравнения, где скорость звуковых волн в направлениях слева-направо и справа-налево отображается на противоположных осях. Предполагается, что положение максимальной корреляции между данными двумерного БПФ и данными волнового уравнения может соответствовать положению, при котором скорость звуковых волн в направлении слева-направо равна скорости звуковых волн в направлении справа-налево. Дополнительно предполагается, что это положение максимальной корреляции может соответствовать измеренной скорости звука (с) внутри канала.
[0082] В типовых аспектах изобретения, система поверхностей может быть сгенерирована из уравнения CBPSM для скорости, распространяющейся слева-направо в диапазоне от 300 м/с до 400 м/с и, аналогично, для скоростей распространяющихся справа-налево с точностью около 1 м/с. Эта система поверхностей может состоять из около 10000 (100×100) поверхностей.
[0083] Предполагается, что каждая поверхность карты поверхностей может быть соотнесена с данными, полученными от множества датчиков 20 путем сравнения наименьших квадратов, известным в данной области техники. Полученный в результате коэффициент корреляции может быть нанесен на графике относительно скоростей справа-налево и слева-направо, как показано на Фигурах 16, 18 и 20. Максимальная корреляция может представлять собой оптимальные данные для CBPSM уравнения. Предполагается, что максимальная корреляция может выявить скорости, распространяющиеся как по направлению, так и против потока текучей среды внутри канала.
[0084] При условии ненулевой скорости текучей среды внутри канала, предполагается, что максимальная корреляция может быть определена как для потока справа-налево, так и для потока слева-направо, тем самым обеспечивая распространение звука (cW) по направлению потока текучей среды, и распространения звука (cA) против направления потока текучей среды. На основе данной информации предполагается, что скорость потока текучей среды внутри канала в этом случае можно рассчитать с помощью следующего уравнения:
Flow=(cw-cA)/2.
[0085] Дополнительно предполагается, что скорость звука (csos) внутри канала может быть рассчитана с помощью следующего уравнения:
cSOS=(cw+cA)/2.
Примеры
[0086] В одном экспериментальном примере, была протестирована типовая система, как описано здесь, со следующими параметрами: скорость отбора проб (SR)=10000 Гц; скорость (csos)=350 м/с; диаметр канала и (rw)=1 дюйм (0,02540 м). Учитывая эти параметры, идеальное разделение между соседними датчиками было рассчитано как 0,0350 м, в соответствии со следующим расчетом: zmin=(350 м/с)/(10000 Гц)=0,0350 м. Тем не менее, для упрощения конструкции, массив датчиков был выстроен с расстоянием в 2,000 дюйма (0,05080 м) между соседними датчиками. Учитывая скорость отбора проб, предполагалось, что частоты выше 5000 Гц не будут распространяться в текучей среде, находящейся внутри канала.
[0087] С учетом конструктивных параметров, рассмотренных выше, была испытана типовая система. Звук на частотах от 500 Гц до 5000 Гц был введен в канал слева направо, и были применены описанные здесь способы с целью получения следующих данных двумерного БПФ на Фигуре 7. Скорость звука текучей среды была равна 347 м/с. Используя волновое уравнение CBPSM, описанное здесь, была смоделирована теоретическая поверхность для значения 347 м/с в том же диапазоне частот. Эта теоретическая поверхность отображается на Фигуре 2. Контурное изображение на Фигуре 9 четко иллюстрирует наличие недиагональных частот, не моделируемых в обычных системах, таких как те, которые описаны в патенте США №7725270. Недиагональные элементы на контурном изображении были прекрасно смоделированы с помощью уравнения, вытекающем из корней первой производной нулевого порядка функции Бесселя 
[0088] Как показано на Фигурах 10-12, подобные эксперименты проводились для звуковых волн, распространяющихся слева направо и движущихся со скоростью 347 м/с. В обоих случаях (слева направо и справа налево), было ясно наличие отраженной волны. Как показано, ось волновых чисел выходит за пределы Найквиста и входит область, которая может рассматриваться как отрицательная волновая область.
[0089] Следующий набор данных, изображенный на Фигурах 13-15, отображал звуковые волны, распространяющиеся слева направо и справа налево. Экспериментальные данные двумерного БПФ, отображенные на Фигуре 13, раскрывают причину сохранение данных за пределами Найквиста - функция Бесселя воздействует как на положительные, так и на отрицательные волновые квадранты.
[0090] Этапы обработки, описанные здесь, выполнялись над данными на Фигуре 13. Для того, чтобы выполнить эти этапы, был сгенерирован набор теоретических поверхностей для распространяющихся слева направо и справа налево скоростей, с помощью волнового уравнения CBPSM, описанного здесь. Для этой задачи, диапазон распространяющегося потока от 300 м/с до 400 м/с был создал для обоих направлений с шагом 1,0 м/с, представляя базовый набор из 10000 (100x100) поверхностей. Корреляция для каждой из этих поверхностей относительно данных двумерного БПФ, полученных для поверхности на Фигуре 13, проиллюстрирована на Фигурах 16 и 17.
[0091] Данные на Фигуре 13 были получены для потока текучей среды нулевой скорости. Следовательно, ожидалось, что две распространяющиеся звуковые волны будут иметь одинаковую скорость распространения звука. Можно четко увидеть на Фигуре 17, что максимальная корреляция возникает при скорости 347 м/с для обеих осей.
[0092] Тот же алгоритм был затем применен к текучей среде с ненулевой скоростью потока. Данные, отображаемые на Фигурах 18 и 19, были получены для текучей среды со скоростью потока 5,5 м/с и скоростью звука 347 м/с.
[0093] Как видно на Фигуре 19, скорость, распространяющаяся по ходу потока текучей среды, была определена равной 352 м/с, а скорость, распространяющаяся против потока текучей среды, была определена равной 341 м/с. Используя формулы раскрытые здесь, эти параметры соответствовали значению скорости потока 5,5 м/с и скорости звука 346,5 м/с, которые очень хорошо согласовываются с входящими параметрами.
[0094] Увеличенный поток был смоделирован на Фигурах 20 и 21. На основании Фигуры 21, скорость, распространяющаяся по ходу потока текучей среды, была определена равной 355 м/с, а скорость, распространяющаяся против потока текучей среды, была определена равной 338 м/с. Используя формулы, раскрытые здесь, эти параметры соответствовали значению скорости потока 9,0 м/с и скорости звука 346,5 м/с, которые очень хорошо согласовываются с входящими параметрами.
[0095] Хотя некоторые варианты осуществления изобретения были раскрыты в вышеприведенном описании, специалистам в данной области следует понимать, что множество модификаций и другие варианты осуществления изобретения могут прийти на ум тем, к кому относится изобретение, получая преимущества из информации, представленной в вышеприведенном описании и соответствующих графических материалах. Таким образом, должно быть понятно, что изобретение не ограничивается конкретными вариантами осуществления изобретения, раскрытыми выше и что многие модификации и другие варианты осуществления изобретения предназначены для включения в объем прилагаемой формулы изобретения. Более того, хотя здесь используются конкретные термины, также как и в последующей формуле изобретения, они употребляются только в общем и описательном смысле, а не для целей ограничения описания изобретение или последующей формулы изобретения.

















Изобретение относится к метрологии, в частности к расходомерам. Устройство содержит канал, заполненный жидкой средой, и преобразователи сигнала для приема звуковых волн, сгенерированных текущей средой. Каждый датчик содержит средство для измерения скорости и размещен вдоль канала. Устройство содержит средство для моделирования наложения множества звуковых волн при их распространении внутри канала, которое осуществляет прием сигналов, назначение переменной положения сигналу датчика, хранение массива сигналов временной области и соответствующих им переменных положения. При этом средство для моделирования наложения сконфигурировано для обработки массива сигналов временной области для выработки модели фаз множества звуковых волн при их распространении в вышеуказанном канале и наложения множества звуковых волн, которые смоделированы с использованием волновых уравнений:
 ,
,
 ,
,
где Ψ - фаза волны, rw - радиус канала, z - горизонтальное положение волны, t - время, N - амплитуда волны, J0 - цилиндрическая функция Бесселя, Mcal - коэффициент калибровки, f - частота, c - скорость волн и k - волновое число. Технический результат – повышение точности измерений. 2 н. и 18 з.п. ф-лы, 21 ил., 1 табл. 
1. Система для измерения наложения множества звуковых волн, распространяющихся внутри канала, содержащего текучую среду, причем канал имеет продольную длину, при этом текучая среда протекает через канал в направлении потока и при этом по меньшей мере одна звуковая волна из множества звуковых волн сгенерирована текучей средой, протекающей внутри канала, при этом система содержит:
множество датчиков, расположенных по существу параллельно направлению потока вдоль по меньшей мере части продольной длины канала, в котором каждый датчик из множества датчиков содержит средство для измерения скорости потока текучей среды внутри канала в направлении потока, причем каждый датчик из множества датчиков дополнительно содержит средство для измерения скорости, с которой множества звуковых волн распространяются в текучей среде, и при этом каждый датчик из множества датчиков размещен с промежутками по отношению к заранее определенной опорной точке на канале, при этом размещение с промежутками соответствует расстоянию в продольном направлении между датчиком и опорной точкой;
средство для моделирования наложения множества звуковых волн при их распространении внутри канала, в котором средство для моделирования наложения находится в коммуникации с каждым датчиком из множества датчиков и в котором средство для моделирования наложения сконфигурировано для:
приема сигнала временной области от каждого датчика;
назначение переменной позиционирования сигналу временной области, указывающей на определенное положение датчика, который сгенерировал сигнал во временной области; и
хранения массива сигналов временной области и соответствующих им переменных позиционирования,
при этом помимо хранения выбранного числа сигналов временной области средство для моделирования наложения сконфигурировано для обработки массива сигналов временной области для выработки модели фаз множества звуковых волн при их распространении в вышеуказанном канале, и
в котором наложение множества звуковых волн смоделированы с использованием волновых уравнений:
 ,
,  ,
,
где Ψ - фаза волны, движущейся справа-налево (RL) или слева-направо (LR) через канал,
rw - радиус канала,
z - горизонтальное положение волны, измеренное относительно направления потока текучей среды внутри канала,
t - время, прошедшее с момента генерирования волны,
N - амплитуда звуковой волны,
J0 - цилиндрическая функция Бесселя первого рода,
Mcal - коэффициент калибровки,
f - частота звуковых волн,
c - скорость звуковых волн внутри канала,
k - волновое число, связанное со звуковыми волнами.
2. Система по п. 1, отличающаяся тем, что средство для моделирования наложения сконфигурировано для:
генерирования сигнала частотной области, связанного с каждым датчиком;
формирования двумерной матрицы временной и пространственной областей для множества датчиков, содержащей сигналы временной и частотной областей, связанные с соответствующим датчиком;
выполнения двумерного быстрого преобразования Фурье (2DFFT) двумерной матрицы временной и пространственной областей; и
корреляции результатов двумерного БПФ с результатами, смоделированными с использованием волновых уравнений.
3. Система по п. 2, отличающаяся тем, что средство для моделирования наложения сконфигурировано для определения величины максимальной корреляции между результатами двумерного БПФ и результатами, смоделированными с использованием волновых уравнений.
4. Система по п. 3, отличающаяся тем, на основе максимальной корреляции между результатами двумерного БПФ и результатами, смоделированными с использованием волновых уравнений, средство для моделирования наложения сконфигурировано для вычисления распространения звука в направлении потока текучей среды и распространения звука против направления потока текучей среды внутри канала.
5. Система по п. 4, отличающаяся тем, что исходя из вычисленного распространения звука внутри канала, средство для моделирования наложения сконфигурировано для вычисления по меньшей мере одного из: скорости потока текучей среды и скорости звука внутри канала
6. Система по п. 1, отличающаяся тем, что сигнал временной области, связанный с каждым датчиком, является показателем измеренной скорости потока текучей среды через канал в направлении потока, и скорости, с которой звуковые волны распространяются в текучей среде.
7. Система по п. 2, отличающаяся тем, что средство для моделирования наложения дополнительно сконфигурировано для:
выполнения одномерного быстрого преобразования Фурье (1DFFT) сигнала временной области, полученного от каждого соответствующего датчика; и
генерирования нормированного сигнала временной области для каждого соответствующего датчика,
при этом нормированный сигнал временной области включен в двумерную матрицу временной и пространственной областей.
8. Система по п. 1 отличающаяся тем, что множество звуковых волн содержит первую и вторую звуковые волны.
9. Система по п. 1, отличающаяся тем, что множество датчиков содержит два датчика.
10. Система по п. 1, отличающаяся тем, что множество датчиков содержит по меньшей мере 64 датчика.
11. Система по п. 1, отличающаяся тем, что множество датчиков содержит по меньшей мере 128 датчиков.
12. Система по п. 1, отличающаяся тем, что каждый датчик из множества датчиков по отношению к соседним датчикам размещен с промежутками в продольном направлении посредством разделительного отрезка.
13. Система по п. 12, отличающаяся тем, что длина разделительного отрезка находится в пределах от около 12,7 мм (0,5 дюйма) до около 88,9 мм (3,5 дюйма).
14. Система по п. 12, отличающаяся тем, что длина разделительного отрезка находится в пределах от около 25,4 мм (1,0 дюйма) до около 76,2 мм (3,0 дюйма).
15. Система по п. 12, отличающаяся тем, что длина разделительного отрезка находится в пределах от около 38,1 мм (1,5 дюйма) до около 63,5 мм (2,5 дюйма).
16. Система по п. 1, отличающаяся тем, что средство для моделирования наложения множества звуковых волн содержит вычислительное средство с процессором.
17. Система по п. 16, отличающаяся тем, что процессор содержит аналого-цифровой преобразователь для обработки наборов данных, полученных от множества датчиков, и при этом аналого-цифровой преобразователь обрабатывает наборы данных со скоростью отбора проб.
18. Система по п. 1, отличающаяся тем, что канал содержит внешнюю поверхность, и отличающаяся тем, что множество датчиков съемно монтируемы на внешней поверхности канала.
19. Система по п. 18, отличающаяся тем, что множество датчиков взаимосвязаны для формирования по существу линейной матрицы датчиков.
20. Способ измерения наложения множества звуковых волн, распространяющихся внутри канала, содержащего текучую среду, причем через канал текучая среда протекает в направлении потока, и при этом по меньшей мере одна звуковая волна из множества звуковых волн сгенерирована текучей средой, протекающей внутри канала, и который включает:
предоставление множества датчиков, расположенных по существу параллельно направлению потока вдоль по меньшей мере части продольной длины канала, в котором каждый датчик из множества датчиков содержит средство для измерения скорости потока текучей среды внутри канала в направлении потока, причем каждый датчик из множества датчиков дополнительно содержит средство для измерения скорости, с которой множество звуковых волн распространяются в текучей среде, и при этом каждый датчик из множества датчиков размещен с промежутками по отношению к заранее определенной опорной точке на канале, при этом размещение с промежутками соответствует расстоянию в продольном направлении между датчиком и опорной точкой;
получение сигнала временной области каждого соответствующего датчика;
назначения переменных позиционирования сигналу временной области, указывающего на определенное положение датчика, который сгенерировал сигнал временной области;
хранение массива сигналов временной области и соответствующих им переменных позиционирования; и
обработку массива наборов данных для выработки модели наложения множества звуковых волн при их распространении внутри канала,
в котором наложение множества звуковых волн моделируется с использованием волновых уравнений:
,
,
где Ψ - фаза волны, движущейся справа-налево (RL) или слева-направо (LR) через канал,
rw - радиус канала,
z - горизонтальное положение волны, измеренное относительно направления потока текучей среды внутри канала,
t - время, прошедшее с момента генерирования волны,
N - амплитуда звуковой волны,
J0 - цилиндрическая функция Бесселя первого рода,
Mcal - коэффициент калибровки,
f - частота звуковых волн,
c - скорость звуковых волн внутри канала,
k - волновое число, связанное со звуковыми волнами.
| WO 2004044532 A2, 27.05.2004 | |||
| US 20110137585 A1, 09.06.2011 | |||
| US 5285675 A1, 15.02.1994 | |||
| US 20040069069 A1, 15.04.2004 | |||
| US 20080208483 A1, 28.08.2008 | |||
| US 6732575 B2, 11.05.2004 | |||
| WO 2003062759 A1, 31.07.2003 | |||
| US 20050125166 A1, 09.06.2005 | |||
| WO 2004065912 A2, 05.08.2004 | |||
| US 8346491 B2, 01.01.2013 | |||
| WO 2007009097 A1, 18.01.2007 | |||
| WO 2009149361 A1, 10.12.2009 | |||
| US 7322251 B2, 29.01.2008 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕКУЧИХ СРЕД В ТРУБЕ И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2250438C9 |
| . | |||

