Настоящее изобретение относится к ультразвуковым диагностическим системам визуализации, в частности к ультразвуковым диагностическим системам визуализации, которые формируют пространственно составные изображения в формате трапецеидального сектора.
Пространственное составление является методом визуализации, в котором несколько ультразвуковых изображений заданного объекта, которые получены с нескольких точек наблюдения или углов (направлений наблюдения), объединяются в одно составное изображение путем объединения данных, принятых из каждой точки в заданном объекте составного изображения, которые приняты с каждого угла или направления наблюдения. Примеры пространственного составления можно найти в патентах США №4649327 (Fehr et al.); №4319489 (Yamaguchi et al.); №4159462 (Rocha et al.); №6210328 (Robinson et al.); №6126598 (Entrekin et al.) и №6224552 (Jago et al.). Реально-временная пространственная составная визуализация выполняется быстрым сбором серии частично совпадающих составляющих кадров изображений под, по существу, независимыми пространственными направлениями, с использованием матричного преобразователя для реализации электронного управления пучком и/или электронного перемещения составляющих кадров. Составляющие кадры объединяются в составное изображение путем суммирования, усреднения, пикового детектирования или с помощью другого комбинационного средства. Последовательность сбора данных и формирование составных изображений непрерывно повторяются с частотой, ограниченной частотой сбора кадров, то есть временем, требуемым для сбора полного набора линий сканирования составляющих кадров по выбранной ширине и глубине визуализации. Составное изображение обычно показывает меньшую спекл-структуру и лучшее оконтуривание зеркальных отражателей, чем обычные ультразвуковые изображения с единственной точки наблюдения. Спекл-структура ослабляется (т.е. улучшается отношение спеклового сигнала к шуму) в корень квадратный из N раз в составном изображении из N составляющих кадров, при условии, что составляющие кадры, используемые для создания составного изображения, по существу, независимы и усредняются. Для определения меры независимости составляющих кадров применимы несколько критериев (см., например, O'Donnell et al., IEEE Trans. UFFC v.35, no.4, pp 470-76 (1988). На практике, для пространственной составной визуализации с управляемой линейной решеткой предполагается минимальный угол поворота между составляющими кадрами. Упомянутый минимальный угол обычно составляет порядка нескольких градусов, например, трех или четырех градусов.
Второй метод, которым пространственное составное сканирование повышает качество изображения, является улучшение получения зеркальных границ раздела. Например, криволинейная граница раздела костной и мягкой тканей создает сильное эхо, когда ультразвуковой пучок точно перпендикулярен границе раздела, и очень слабое эхо, когда пучок всего на несколько градусов отклонен от перпендикуляра. Упомянутые границы раздела часто криволинейны, и при обычном сканировании наблюдается только небольшой участок границы раздела. Пространственное составное сканирование получает виды границы раздела под многими разными углами, что делает криволинейную границу раздела видимой и непрерывной по большему полю обзора. Большее угловое разнесение обычно совершенствует неразрывность зеркальных заданных объектов. Однако доступное угловое разнесение ограничено углом приема элементов решетки преобразователя. Угол приема зависит от шага, частоты и способов изготовления элементов решетки преобразователя.
Пространственное составление можно выполнять в различных форматах изображения, используемых в ультразвуковой визуализации, включая секторные изображения и линейные изображения. Обычным форматом для пространственного составления является управляемый линейный формат, например, описанный в вышеупомянутых патентах авторов Robinson et al., Entrekin et al. и Jago et al. В данном формате каждый составляющий кадр формируется параллельными линиями сканирования, направляемыми в заданном направлении наблюдения. Например, первый составляющий кадр может быть получен с использованием линий сканирования, которые направлены все в направлении 0° (прямо вперед). Второй и третий составляющие кадры можно затем получить всеми линиями сканирования, направленными в направлении +15° и направлении -15° соответственно. Когда составляющие кадры объединяются с пространственным совмещением, они будут создавать изображение трапецеидальной формы, которое является пространственно составным. К сожалению, как изложено выше, эффекты пространственного составления не равномерны по всему изображению. Причина в том, что на разных площадках объединенного изображения степени совпадения изображений являются разными. Соответственно, пространственное составление желательно осуществлять в формате трапецеидального сканирования, в котором эффект пространственного составления объединяет большее число составляющих кадров по наибольшей протяженности пространственно составного изображения.
В соответствии с принципами настоящего изобретения, пространственно составные трапецеидальные изображения формируют сканированием составляющих кадров в режиме виртуального апекса. Виртуальный апекс является методом управления пучком фазированной решетки (в дальнейшем, фазированным пучком), при котором линии сканирования, которые сканируют поле изображения, направляются под разными углами. Данный метод называется виртуальным апексом потому, что все линии сканирования представляются исходящими из общей точки или апекса позади рабочей поверхности ультразвукового преобразователя. Составляющие кадры собираются в формате виртуального апекса с помощью линий сканирования, направляемых под отличающимися углами относительно рабочей поверхности преобразователя в каждом составляющем кадре. Когда составляющие кадры объединяются, происходит совпадение по значительному участку поля изображения, что обеспечивает высокую степень пространственного составления по большой области составного изображения.
На чертежах:
Фигура 1 - блок-схема ультразвуковой диагностической системы визуализации, созданной в соответствии с принципами настоящего изобретения;
Фигура 2 - блок-схема варианта осуществления процессора для пространственного составления, показанного на фигуре 1;
Фигуры 3a-3d - изображения области максимального качества изображения пространственно составного изображения, сформированного составляющими кадрами, полученными в формате управляемого линейного сканирования; и
Фигура 4a-4c - изображения составляющих кадров, полученных для формирования пространственно составного трапецеидального изображения и в соответствии с настоящим изобретением.
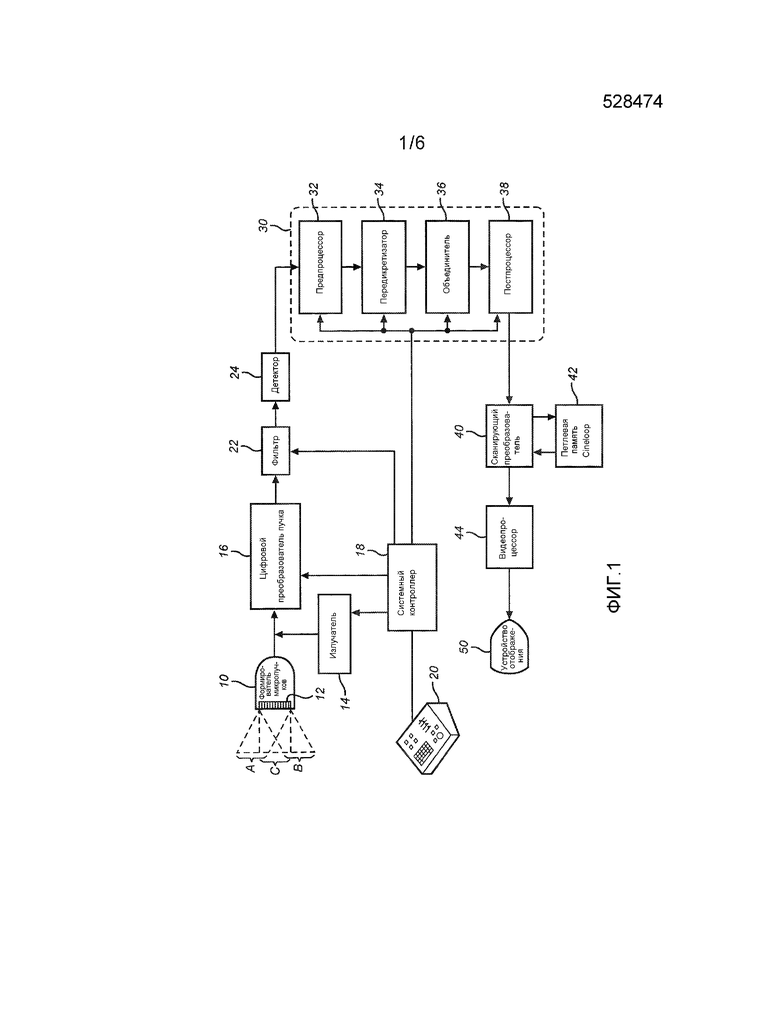
Сначала на фигуре 1 показана ультразвуковая диагностическая система визуализации, созданная в соответствии с принципами настоящего изобретения. Ультразвуковой датчик 10, включающий в себя планарный матричный преобразователь 12, который излучает пучки под разными углами по полю изображения, обозначенные штриховым прямоугольником и параллелограммами, оконтуривающими области, сканируемые посредством сканирования управляемым линейным пучком. На чертеже показаны три группы линий сканирования, обозначенных A, B и C, при этом каждая группа направлена под разным углом относительно рабочей поверхности матричного преобразователя. Матричный преобразователь может быть одномерной (1-мерной) решеткой преобразовательных элементов или двумерной (2-мерной) матричной решеткой преобразовательных элементов. Излучение пучков происходит под управлением излучателя 14, который управляет фазированием и временем включения каждого из элементов матричного преобразователя таким образом, чтобы излучать каждый пучок из предварительно заданной исходной точки вдоль решетки и под предварительно заданным углом. Когда используется 2-мерный матричный преобразователь, излучение и частичное формирование пучка обеспечивается интегральной схемой (ИС) формирователя микропучков (μΒF), расположенного в датчике 10. 1-Мерный матричный преобразователь также может использовать формирователь микропучков, при желании. Эхо-сигналы от каждой линии сканирования принимаются элементами решетки, оцифровываются посредством аналого-цифрового преобразования и подаются в цифровой формирователь 16 пучка. Когда используется формирователь микропучков, по меньшей мере частичное формирование пучка выполняется в датчике посредством формирователя микропучков перед тем, как сигналы вводятся в системный формирователь 16 пучка. Цифровой формирователь пучка задерживает и суммирует эхо-сигналы от элементов решетки или формирователя микропучков, чтобы формировать последовательность сфокусированных когерентных цифровых отсчетов эхо-сигналов вдоль каждой линии сканирования. Излучатель 14, формирователь микропучков и формирователь 16 пучка работают под управлением системного контроллера 18, который, в свою очередь, действует соответственно установочным параметрам средств управления на пользовательском интерфейсе 20, применяемым пользователем ультразвуковой системы. Системный контроллер управляет излучателем (и/или формирователем микропучков) для излучения требуемого числа групп линий сканирования под требуемыми углами, излучения энергий и частот. Системный контроллер также управляет цифровым формирователем пучка, чтобы надлежащим образом задерживать и объединять принятые эхо-сигналы при используемых апертурах и глубинах изображения.
Эхо-сигналы линий сканирования фильтруются программируемым цифровым фильтром 22, который задает полосу частот интереса. При визуализации контрастных веществ с использованием гармоник или при выполнении тканевой гармонической визуализации, полоса пропускания фильтра 22 устанавливается для пропускания гармоник полосы излучения. Затем фильтрованные сигналы детектируются детектором 24. В предпочтительном варианте осуществления фильтр и детектор включают в себя несколько фильтров и детекторов, так что принятые сигналы можно разделять по нескольким полосам пропускания, отдельно детектируемых и повторно объединяемых, чтобы ослаблять спекл-структуру изображения посредством частотного составления. Для визуализации в B-режиме, детектор 24 будет выполнять амплитудное детектирование огибающей эхо-сигналов. Для доплеровской визуализации ансамбли эхо-сигналов собираются для каждой точки в изображении и подвергаются доплеровской обработке, чтобы рассчитать доплеровский сдвиг или интенсивность сигнала в энергетическом Доплере.
В соответствии с принципами настоящего изобретения, цифровые эхо-сигналы обрабатываются методом пространственного составления в процессоре 30. Сначала цифровые эхо-сигналы предварительно обрабатываются предпроцессором 32. Предпроцессор 32 может предварительно умножать отсчеты сигналов, при желании, на весовой коэффициент. Отсчеты могут предварительно умножаться на весовой коэффициент, который является функцией числа составляющих кадров, используемых для формирования конкретного составного изображения. Предпроцессор может также взвешивать краевые линии, которые находятся на краю одного совпадающего изображения, чтобы сглаживать переходы, где изменяется число отсчетов или изображений, которые составляются. Предварительно обработанные отсчеты сигналов могут затем подвергаться передискретизации в передискретизаторе 34. Передискретизатор 34 может повторно пространственно совмещать расчеты одного составляющего кадра или с пикселями пространства отображения.
После передискретизации кадры составляются объединителем 36. Объединение содержать суммирование, усреднение, пиковое детектирование или другое средство объединения. Объединяемые отсчеты можно также взвешивать перед объединением на данном этапе процесса. И, наконец, постобработка выполняется постпроцессором 38. Постпроцессор нормирует объединенные значения, чтобы отобразить диапазон значений. Постобработка может проще всего выполняться посредством таблиц преобразования и может одновременно выполнять сжатие и преобразование диапазона составных значений в диапазон значений, пригодных для отображения составного изображения.
Процесс составления может выполняться в пространстве расчетных данных или в пространстве пикселей отображения. В предпочтительном варианте осуществления сканирующее преобразование выполняется после процесса составления посредством сканирующего преобразователя 40. Составные изображения могут храниться в блоке 42 петлевой памяти Cineloop® либо в расчетной форме, либо в форме пикселей отображения. При хранении в расчетной форме изображения могут подвергаться сканирующему преобразованию в случае воспроизведения из блока петлевой памяти Cineloop для отображения. Сканирующий преобразователь и блок петлевой памяти Cineloop могут также применяться для формирования трехмерных представлений пространственно составных изображений, как описано в патентах США №5485842 и №5860924. После сканирующего преобразования пространственно составные изображения обрабатываются для отображения видеопроцессором 44 и отображаются на устройстве 50 отображения изображений.
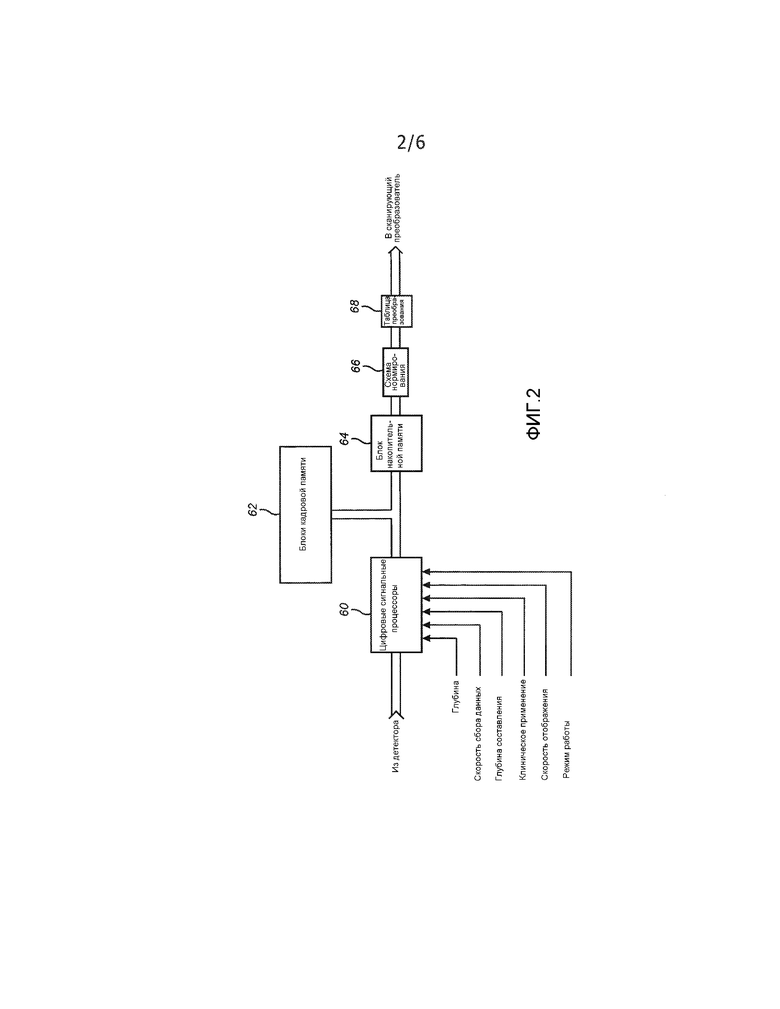
Фигура 2 изображает один вариант осуществления процессора 30 для пространственного составления, показанного на фигуре 1. Процессор 30 в данном примере выполнен одним или более цифровыми сигнальными процессорами 60, которые обрабатывают данные изображения различными методами. Цифровые сигнальные процессоры 60 взвешивают принятые данные изображения и могут передискретизировать данные изображения, например, чтобы пространственно совмещать пиксели от кадра к кадру. Цифровые сигнальные процессоры 60 направляют кадры обработанного изображения во множество блоков 62 кадровой памяти, которые буферизуют отдельные составляющие кадры изображения. Число составляющих кадров изображения, допускающих сохранение в блоках 62 кадровой памяти предпочтительно по меньшей мере равно максимальному числу составляющих кадров изображения, подлежащих составлению, например шестнадцати кадрам. В соответствии с принципами настоящего изобретения, цифровые сигнальные процессоры работают соответственно параметрам управления, включающим в себя глубину устройства отображения изображений, глубину области максимального составления, клинического применения, скорости составного отображения, режима работы и скорости сбора данных, чтобы определять число изображений для составления в данный момент времени. Цифровые сигнальные процессоры выбирают составляющие кадры, хранящиеся в блоках 62 кадровой памяти, для сборки в качестве составного изображения в блоке 64 накопительной памяти. Составное изображение, сформированное в блоке 64 накопительной памяти, взвешивается или преобразуется схемой 66 нормирования, затем сжимается до требуемого числа бит и, при желании, повторно преобразуется посредством таблицы 68 преобразования (LUT). Затем полностью обработанные данные составного изображения передаются в сканирующий преобразователь для форматирования и преобразования.
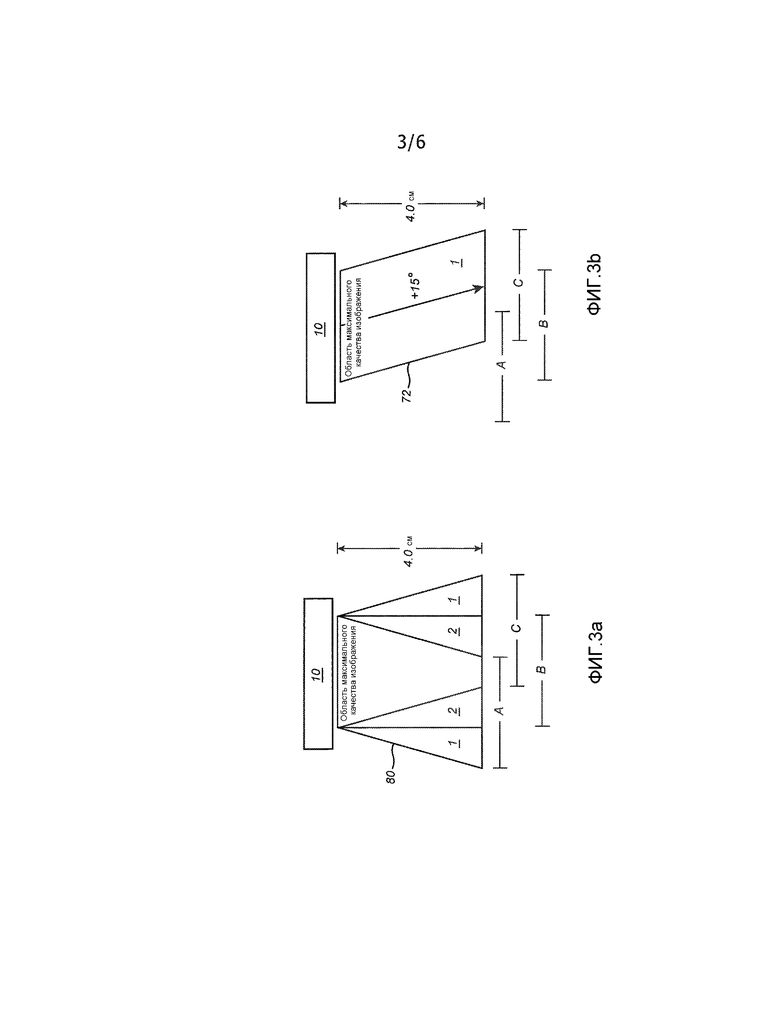
Составное сканирование с управляемой линейной решеткой приводит к такой картине совпадения составляющих кадров, что область максимального качества изображения (RMIQ), в которой совпадают все N кадров, является опрокинутой треугольной областью с ее основанием в верхней части составного изображения. При других геометриях сканирования, например, совпадающих фазированных кадрах, исходящих из разных точек решетки, область RMIQ будет иметь соответственно отличающуюся форму. Это показано фигурами 3a-3d. Фигуры 3b, 3c и 3d показывают составляющие управляемые линейные кадры, которые объединяются для формирования пространственно составного изображения, показанного на фигуре 3a. Составляющий кадр, показанный на фигуре 3b, сформирован множеством параллельных соседних линий сканирования, которые сканируют поле 72 изображения в форме параллелограмма под углом +15°, одна из которых показана в центре кадра 72 изображения. Данный кадр является составляющим кадром «C» составного изображения. Составляющий кадр, показанный на фигуре 3c, формируется множеством параллельных соседних линий сканирования, которые сканируют поле 74 изображения в форме прямоугольника под углом 0°, одна из которых показана в центре кадра 74 изображения. Данный кадр является составляющим кадром «B» составного изображения. Составляющий кадр, показанный на фигуре 3d, формируется множеством параллельных соседних линий сканирования, которые сканируют поле 76 изображения в форме параллелограмма под углом -15°, одна из которых показана в центре кадра 76 изображения. Данный кадр является составляющим кадром «A» составного изображения. На фигуре 3a показаны три составляющих кадра A, B и C, при пространственном совмещении для формирования конечного составного изображения 80. С каждой стороны области RMIQ, в которой совпадают и составляются все три составляющих кадра, число совпадающих кадров уменьшается в пространстве, при этом только по два кадра совпадает в областях, обозначенных 2, и по одному кадру присутствует областях, обозначенных 1. Это означает, что конкретная точка в составном изображении может принимать вклады из поднабора составляющих кадров, зависящего от того, имеет ли составляющий кадр данные в упомянутой точке.
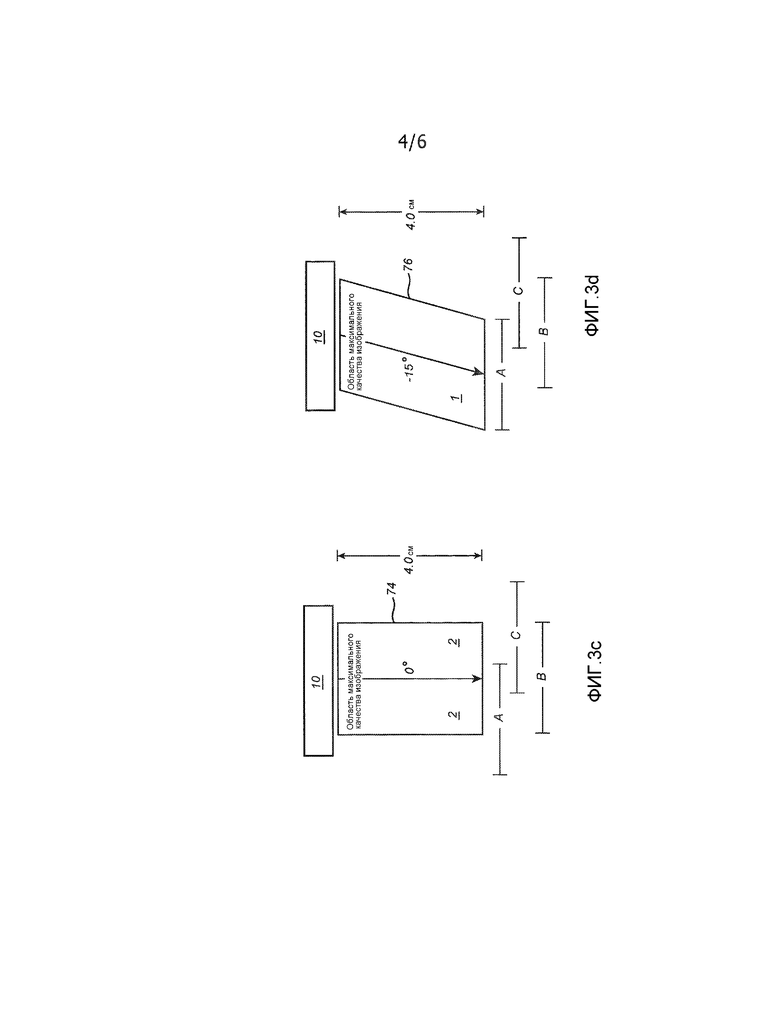
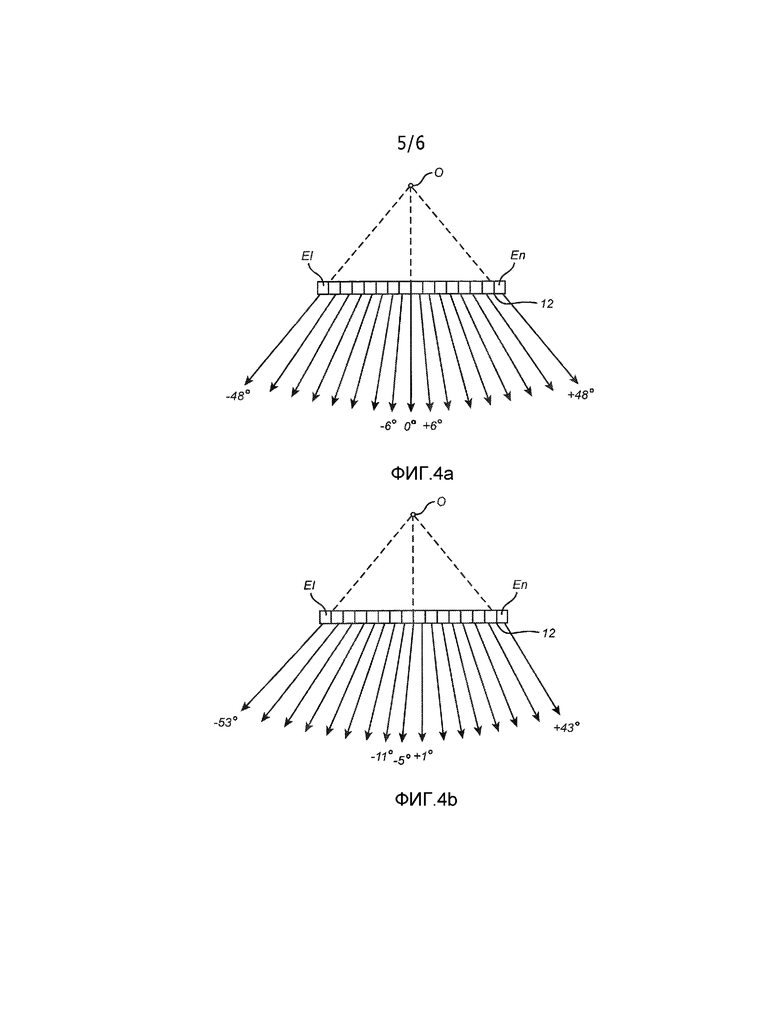
В соответствии с принципами настоящего изобретения, пространственно составное ультразвуковое изображение создается из составляющих кадров, сканированных в формате сканирования в режиме виртуального апекса. Виртуальный апекс является формой сканирования фазированной решеткой, при котором пучки направляются под все более отличающимися углами относительно рабочей поверхности (излучающей поверхности) решетки преобразователя. При обычной визуализации с фазированной решеткой все пучки исходят из общей точки на рабочей поверхности решетки, обычно, в центре решетки. Упомянутая общая точка является апексом секторного изображения треугольной формы. При сканировании в режиме виртуального апекса общая точка, из которой исходят линии сканирования, является «виртуальной» точкой, расположенной позади рабочей поверхности решетки, как описано в патенте США №5123415 (Daigle). Данный формат сканирования показан на фигуре 4a, на котором виртуальный апекс является точкой «O» позади рабочей поверхности решетки 12. Решетка преобразователя в приведенном примере является линейной 1-мерной решеткой, одной линией преобразовательных элементов El-En. Как видно в приведенном примере, центральная линия сканирования излучается и принимается под углом 0° относительно рабочей поверхности решетки. Правило для углов, принятое при ультразвуковом сканировании, обозначает направление прямо вперед перед решеткой как направление 0°. С каждой стороны от упомянутой центральной линии сканирования, соседние линии сканирования становятся все более наклонными под все более увеличивающимися углами. В данном примере линия сканирования непосредственно влево от центра наклонена под углом -6° и линия сканирования непосредственно вправо от центра наклонена под углом +6°. Наклон углов поворота увеличивается с шагом 6° с увеличением расстояния от центра решетки до максимального угла -48° и +48° линии сканирования на боковых сторонах сканируемого поля изображения в форме сектора.
Формат сканирования на фигуре 4a создает один составляющий кадр для пространственного составления в приведенном примере. Два других составляющих кадра показаны на фигурах 4b и 4c. На фигуре 4b каждая линия сканирования исходит из той же точки на рабочей поверхности решетки, подобно линиям сканирования на фигуре 4a, но линии наклонены в направлениях наблюдения, отличающихся на 5° влево. Линия сканирования, которая была направлена под углом 0° на фигуре 4a, направлена под углом -5° на фигуре 4b. Данная линия сканирования теперь исследует поле изображения в направлении наблюдения, отличающемся от 0° линии сканирования, показанной на фигуре 4a. Отличие на 5° в направлении наблюдения обеспечивает разнесение по направлению наблюдения, достаточное для создания характеристики ослабления спекл-структуры пространственно составного изображения. Аналогично, линия сканирования влево от центра, которая первоначально была направлена под углом -6°, теперь направлена с дополнительным прибавлением на шаг в 5°, так что данная линия направлена под углом -11°. Линия сканирования вправо от центра, первоначально направленная под углом +6°, теперь направлена под углом +1°. Данное инкрементальное (по шагам) изменение углов поворота выполняется по полю изображения, и линия сканирования с левой боковой стороны сектора наклонена под углом -53°, и линия сканирования с правой боковой стороны наклонена под углом +43°. Таким образом, каждая точка в поле изображения на фигуре 4b исследуется с направления наблюдения, отличающегося от направления наблюдения, создаваемого форматом сканирования, показанным на фигуре 4a.
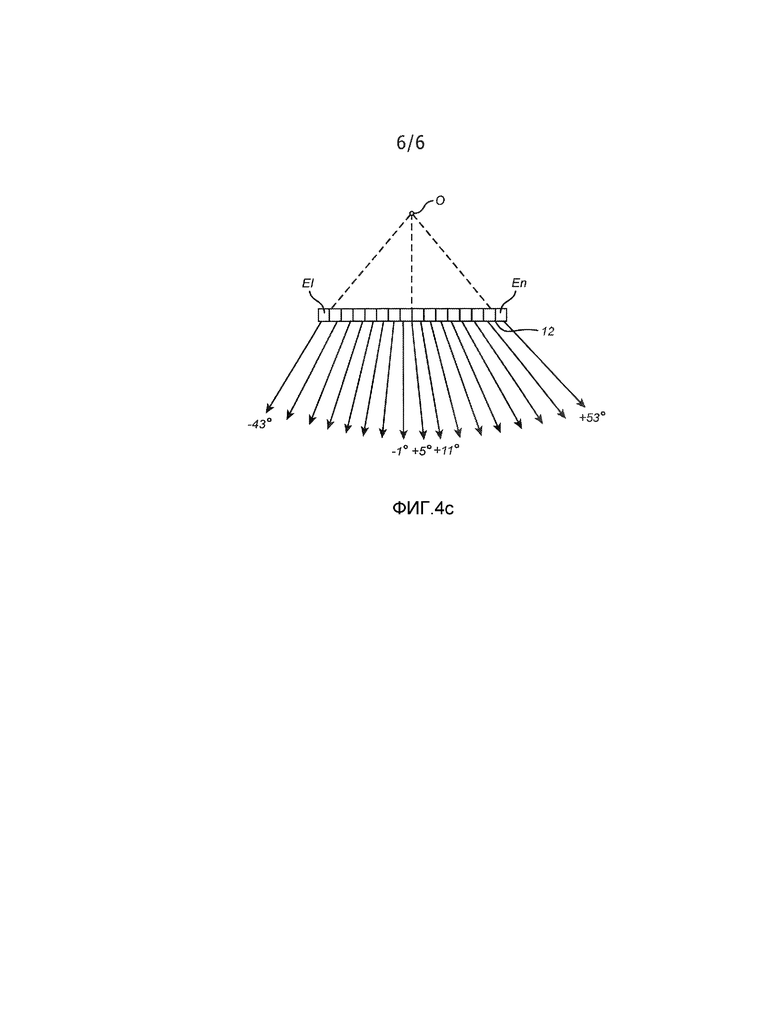
На фигуре 4c каждая линия сканирования снова исходит из той же точки на рабочей поверхности решетки, как на предыдущих составляющих кадрах, но в данном случае с прибавлением угла на шаг в 5° вправо. Таким образом, линия сканирования 0° на фигуре 4a теперь направлена под углом +5°. Линия сканирования влево от центра, которая была направлена под углом -6° на фигуре 4a, теперь направлена под углом -1° на фигуре 4c, и линия сканирования вправо, которая была направлена под углом +6°, теперь направлена под углом +11°. Такое 5° прибавление наклона каждой линии сканирования повторяется по всему полю изображения, что приводит к направлению крайней левой линии сканирования под углом -43° и наклону крайней правой линии сканирования под углом +53°. Данное изменение имеет следствием исследование каждой точки в поле изображения под третьим направлением наблюдения, которое отличается от направления наблюдения как первого, так и второго составляющих изображений.
Когда три составляющих изображения с фигур 4a, 4b и 4c составляют, то имеет место составление трех составляющих изображений по, фактически, всей области площади изображения. Иначе говоря, область RMIQ существует, фактически, всей области площади изображения. Область RMIO резко уменьшается только на боковых краях изображения. Метод пространственного составления в соответствии с изобретением эффективен как при двумерной, так и при трехмерной визуализации, его можно выполнять путем как стандартного сканирования фазированной решеткой, так и фазированного сканирования в режиме виртуального апекса, и его можно выполнять с данными изображения, преобразованными при сканировании или преобразованными перед сканированием. Обычно, хотя каждый составляющий кадр намного удобнее получать целиком до сканирования другого составляющего кадра, специалистам в данной области техники будет ясно, что линии сканирования разных составляющих кадров можно собирать с чередованием во времени. Например, линию сканирования, исходящую из одной точки на рабочей поверхности решетки, можно получить в первом направлении наблюдения для одного составляющего кадра, линию сканирования, исходящую из той же точки, можно получить во втором направлении наблюдения для второго составляющего кадра, и линию сканирования, исходящую из той же точки, можно получить в третьем направлении наблюдения для третьего составляющего кадра. Затем составляющие кадры собирают из упомянутых линий сканирования, чередующихся во времени.
Использование: для получения ультразвукового изображения объекта. Сущность изобретения заключается в том, что ультразвуковая диагностическая система визуализации создает пространственно составные изображения в трапецеидальном секторе посредством объединения составляющих кадров, собранных с разных направлений наблюдения. Формат сканирования в режиме виртуального апекса применяется так, что каждая линия сканирования составляющего кадра исходит из отличающейся точки (E1, En) на рабочей поверхности матричного преобразователя и направляется под отличающимся углом сканирования. Для разных составляющих кадров линии сканирования направляются под соответственно разными углами. В показанном примере линии сканирования каждого составляющего кадра дополнительно отклоняются на пять градусов относительно соответствующих линий сканирования в опорном составляющем кадре. Когда составляющие кадры объединяются для пространственного составления, максимальное число составляющих кадров объединяется по, фактически, всему полю изображения. Технический результат: повышение качества ультразвукового изображения объекта. 14 з.п. ф-лы, 9 ил.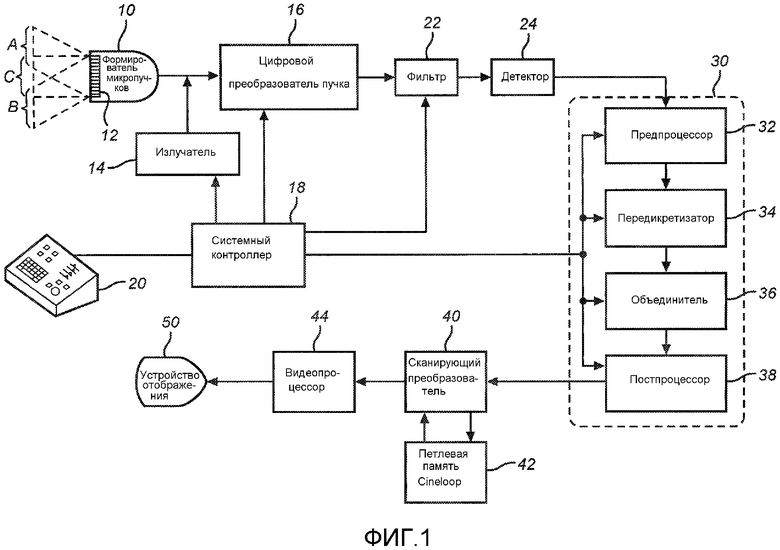
1. Ультразвуковая диагностическая система визуализации для формирования пространственно составных изображений, включающая в себя
матричный преобразователь (12), выполненный с возможностью сбора составляющих кадров с множества разных направлений наблюдения, и
процессор (30) составных изображений, содержащий:
излучатель (14), выполненный с возможностью управления матричным преобразователем для направления линий сканирования в трапецеидальном формате сканирования для каждого из множества составляющих кадров, при этом преобразователь выполнен с возможностью формирования множества разных направлений наблюдения посредством направления (1) линий сканирования каждого составляющего кадра под множеством разных углов сканирования, при этом линии сканирования каждого составляющего кадра направляются (2) под соответственно разными углами сканирования относительно соответствующих линий сканирования других составляющих кадров, причем линии сканирования каждого составляющего кадра из множества отклонены на шаг относительно других составляющих кадров под углами влево или вправо от центра матричного преобразователя; и
блок (62) памяти составных изображений, выполненный с возможностью хранения составляющих кадров, которые собраны с разных направлений наблюдения,
причем процессор (30) составных изображений выполнен с возможностью объединения собранных составляющих кадров для формирования пространственно составного изображения.
2. Ультразвуковая диагностическая система визуализации по п. 1, дополнительно содержащая формирователь (16) пучка, выполненный с возможностью приема эхо-сигналов с направления каждой линии сканирования.
3. Ультразвуковая диагностическая система визуализации по п. 2, в которой излучатель дополнительно содержит формирователь микропучков, при этом матричный преобразователь и формирователь микропучков расположены оба в ультразвуковом датчике (10).
4. Ультразвуковая диагностическая система визуализации по п. 2, в которой формирователь пучка дополнительно содержит формирователь микропучков, при этом матричный преобразователь и формирователь микропучков расположены оба в ультразвуковом датчике (10).
5. Ультразвуковая диагностическая система визуализации по п. 1, в которой матричный преобразователь (12) дополнительно содержит одномерную линейную решетку преобразовательных элементов.
6. Ультразвуковая диагностическая система визуализации по п. 1, в которой матричный преобразователь (12) дополнительно содержит двумерную планарную решетку преобразовательных элементов.
7. Ультразвуковая диагностическая система визуализации по п. 1, в которой соответствующие линии сканирования каждого составляющего кадра исходят из одних и тех же точек на рабочей поверхности матричного преобразователя (12).
8. Ультразвуковая диагностическая система визуализации по п. 1, в которой излучатель (14) дополнительно выполнен с возможностью направления соответствующих линий сканирования каждого составляющего кадра, которые исходят из одной и той же точки на рабочей поверхности матричного преобразователя (12), под разными углами наклона.
9. Ультразвуковая диагностическая система визуализации по п. 1, в которой трапецеидальный формат сканирования дополнительно содержит область ближнего поля перед рабочей поверхностью матричного преобразователя (12), в которой линии сканирования сходятся в общем апексе.
10. Ультразвуковая диагностическая система визуализации по п. 1, в которой излучатель (14) дополнительно выполнен с возможностью управления матричным преобразователем (12) для направления линий сканирования каждого составляющего кадра посредством управления пучком фазированной решетки.
11. Ультразвуковая диагностическая система визуализации по п. 1, в которой излучатель (14) дополнительно выполнен с возможностью управления матричным преобразователем (12) для направления линий сканирования каждого составляющего кадра в формате сканирования в режиме виртуального апекса.
12. Ультразвуковая диагностическая система визуализации по п. 1, в которой матричный преобразователь (12) выполнен с возможностью сбора линий сканирования составляющих кадров с чередованием во времени.
13. Ультразвуковая диагностическая система визуализации по п. 1, в которой матричный преобразователь (12) выполнен с возможностью сбора данных с разнесением направлений наблюдения между множеством составляющих кадров, при этом разнесение направлений наблюдения между составляющими кадрами равно по меньшей мере трем градусам.
14. Ультразвуковая диагностическая система визуализации по п. 13, в которой разнесение направлений наблюдения между составляющими кадрами равно пяти градусам.
15. Ультразвуковая диагностическая система визуализации по п. 1, в которой процессор (30) составных изображений выполнен с возможностью объединения собранных составляющих кадров одним из средств суммирования, усреднения, пикового детектирования или другого комбинационного средства.
| EP 1906207 A1, 02.04.2008 | |||
| US 6102860 A, 15.08.2000 | |||
| СПОСОБ ПОЛУЧЕНИЯ Ы-(ПИРРОЛИДОНИЛ-АЛКИЛ) ГЛИЦИДИ-ЛОВЬ[Х ЭФИРОВ | 0 |
|
SU293803A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ КОНСТРУКТИВНОГО ЭЛЕМЕНТА ТУРБИНЫ | 2005 |
|
RU2360241C2 |
| Система акустического изображения | 1987 |
|
SU1439486A1 |

