Изобретение относится к области контроля технического состояния асинхронных электродвигателей и может быть использовано для обнаружения обрывов стержней обмоток роторов асинхронных электродвигателей. Известен способ контроля состояния короткозамкнутой обмотки ротора по внешнему электромагнитному полю машины (Диагностирование обрыва стержня клетки ротора асинхронного электродвигателя / С.А. Волохов, П.Н. Добродеев, А.В. Кильдышев // Электротехника. - Вып. №2. - 1998. - с. 13-15). Контроль производят в режиме короткого замыкания машины (ротор неподвижен) при пониженном напряжении. На корпусе машины устанавливают контрольно-измерительную магнитную систему с многополюсными намагничивающими и двухполюсными измерительными обмотками, измеряющую магнитный диполь внешнего электромагнитного поля асинхронного двигателя, который является диагностическим параметром обрыва стержня. У симметричной обмотки ротора магнитный диполь практически равен нулю, а при возникновении обрыва его величина становится значительной, что является диагностическим признаком повреждения «беличьей клетки».
Недостатком указанного способа является необходимость создания специального режима для электродвигателя - режима короткого замыкания при пониженном напряжении;
Известен «Способ диагностики повреждения обмотки короткозамкнутого ротора асинхронного двигателя» (патент республики Казахстан на изобретение №21246, МПК Н02Н 7/08, H02K 11/00, 2009 г.), основанный на контроле параметров внешнего магнитного поля и формировании сигнала о результате диагностики, контроле во внешнем магнитном поле появления двух наиболее информативных боковых гармонических с частотами f0±Δf0, сравнении каждой из них с эталонной величиной и формировании в случае превышения хотя бы одной из них установленной для каждой из них эталонной величины сигнала о повреждении обмотки короткозамкнутого ротора, где f0-fc/p⋅(s(±p+1)+1) - частота несущей гармонической, s - скольжение короткозамкнутого ротора, p - число полюсов асинхронного двигателя, fc - частота основной гармонической сети, a Δf0=±pfcs.
Недостатками этого способа являются:
- необходимость установки датчика частоты вращения вала ротора электродвигателя, представляющего из себя прикрепленный к валу магнит и геркон, что увеличивает вероятность отказа системы контроля, а также увеличивает количество незапланированных остановок двигателя по причине задевания вала ротора за геркон;
- слабое проявление двух информативных боковых гармоник на фоне помех асинхронного двигателя, вызванных эффектом растекания на основной гармонике 50 Гц, что приводит к возможности неправильного определения частот данных информативных боковых гармоник, а, следовательно, и ошибочному диагностическому выводу.
За прототип принят способ обнаружения дефектов ротора асинхронного двигателя (патент США на изобретение №4761703, «Rotor Fault Detector for Induction Motors», МПК H02H 7/08, 1988), основанный на регистрации диагностического сигнала (в качестве которого выступает аксиальная составляющая магнитного потока за пределами корпуса электродвигателя, регистрируемая с помощью кольцевого датчика, измерения производятся с торца двигателя, в районе подшипникового узла), определении с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определении значений частоты сети путем поиска точки в амплитудном спектре с максимальной амплитудой и проведением интерполяции этого значения и двух соседних точек, определения скольжения асинхронного двигателя, определения значений частот и амплитуд гармоник ƒn=ƒ0⋅(n⋅(1-s)±s), сравнении этих амплитуд с граничными значениями и по полученным результатам оценки состояния обмотки ротора асинхронного электродвигателя, где
ƒ0 - частота сети, Гц;
s - скольжение ротора;
p - число пар полюсов двигателя;
n=1, 5, 7, 11 …;
ƒn - характерные частоты неисправностей обмоток роторов асинхронных двигателей, Гц;
Недостатками способа-прототипа являются:
- необходимость установки датчика в торцевой зоне асинхронного двигателя соосно с осью вала ротора (очень часто в асинхронных двигателях с торца расположена система охлаждения, поэтому у таких двигателей корректная регистрация параметров внешнего магнитного поля невозможна);
- невозможность применения одного и того же кольцевого датчика для двигателей разных габаритов (диаметр кольцевого датчика зависит от диаметра ротора);
- необходимость для корректной работы метода большой длительности времени записи сигнала (не менее 30 сек). В противном случае погрешность определения скольжения, а следовательно, и зависящих от него частот гармоник, характеризующих наличие повреждения в обмотке ротора, становится недопустимо высокой;
- низкая достоверность пороговых значений наличия оборванных стержней в обмотке ротора, так как они получены по результатам экспериментов, проведенных только на одном типе двигателей.
Техническим результатом предлагаемого способа являются повышение достоверности обнаружения обрывов стержней и повышение удобства проведения указанного обнаружения обрывов стержней.
Технический результат достигается тем, что в способе обнаружения обрывов стержней короткозамкнутых обмоток роторов асинхронных электродвигателей, включающем цифровую регистрацию сигнала во времени, определение с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определение максимума амплитудного спектра и соответствующей ему частоты, которая близка по значению к частоте сети, определение точного значения частоты сети, определение скольжения ротора электродвигателя, определение значений частот и амплитуд гармоник, которые характерны для поврежденной обмотки ротора, в качестве регистрируемого сигнала используют радиальную составляющую индукции внешнего магнитного поля, регистрацию которой осуществляют датчиком магнитного поля, устанавливаемым на корпусе электродвигателя в зоне середины длины сердечника статора, в зарегистрированном сигнале точное значение частоты сети определяют по методу автокоррекции времени записи сигнала, из сигнала удаляют гармонику с частотой сети, определяют значения частот верхней и нижней боковых полос первой гармоники от эксцентриситета ротора по методу автокоррекции времени записи сигнала, скольжение ротора определяют по точному значению частоты сети и значениям частот верхней и нижней боковых полос первой гармоники от эксцентриситета ротора, затем вычисляют частоты нижней и верхней боковых полос первых пяти гармоник от фиктивной обмотки ротора, определяемых по выражениям  и
и  , где
, где
ƒc - частота сети, Гц;
s - скольжение ротора;
p - число пар полюсов двигателя;
ν=1, 2, 3, 4, 5 - порядок гармоники;
ν- - нижняя боковая полоса гармоники ν-го порядка;
ν+ - верхняя боковая полоса гармоники ν-го порядка;
 - частота нижней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц,
- частота нижней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц,
 - частота верхней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц;
- частота верхней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц;
которые принимают в качестве гармоник, характерных для поврежденной обмотки ротора, исключая верхнюю боковую полосу гармоники фиктивной обмотки ротора, порядок которой равен числу пар полюсов электродвигателя, а также боковые полосы гармоник фиктивной обмотки ротора, частоты которых совпадают с частотами верхней или нижней боковых полос гармоники эксцентриситета ротора первого порядка, по методу автокоррекции времени записи сигнала определяют значения амплитуды этих боковых полос гармоник, по полученным значениям амплитуд вычисляют среднюю мощность сигнала, полученное значение сравнивают с пороговым значением и формируют сигнал о наличии или отсутствии повреждения обмотки ротора.
Сущность способа заключается в следующем.
Хорошо известно, что в магнитном поле воздушного зазора асинхронного двигателя обнаруживаются высшие гармонические составляющие, вызванные неравномерностью воздушного зазора, зубчатостью ротора, насыщением сердечника, эксцентриситетом ротора и т.д. Аналогичные гармоники появляются и в сигнале магнитного поля за пределами корпуса асинхронного двигателя (далее - внешнего магнитного поля). В прототипе было показано существование в спектре сигнала гармонических составляющих, амплитуды которых сильно зависят от состояния обмотки ротора. В статье «Анализ спектра магнитного поля в зазоре асинхронного двигателя при повреждении обмотки ротора», Скоробогатов А.А., Вестник ИГЭУ; вып. 2, - Иваново: ИГЭУ, 2006. С. 75-78 данные гармонические составляющие названы гармониками от фиктивной обмотки ротора (гармониками ФОР). Частоты нижней и верхней боковых полос каждой гармоники ν-го порядка могут быть определены по выражениям (1) и (2) соответственно:


Значительное увеличение амплитуд нижней и верхней боковых полос каждой гармоники ФОР может служить диагностическим признаком обрывов стержней обмотки ротора асинхронного двигателя.
Для выявления этих составляющих гармоник ФОР необходимо знать скольжение двигателя. Скольжение двигателя предлагается определять по нижней и верхней боковым полосам гармоники от эксцентриситета ротора (ГЭР) первого порядка (например, по способу, описанному в патенте РФ на изобретение №2559162, МПК G01R 31/34, 2015 г.), разница заключается лишь в том, что в качестве регистрируемого (диагностического) сигнала будет выступать не ток статора, а радиальная составляющая индукции внешнего магнитного поля. Также предлагается после определения частоты сети с помощью метода автокоррекции времени записи сигнала удалять из сигнала эту гармоническую составляющую для уменьшения ее влияния на амплитуды нижней и верхней боковых полос гармоник ФОР.
Для большей достоверности результата в качестве диагностического признака наличия оборванных стержней в обмотке ротора асинхронного электродвигателя предлагается использовать заметное увеличение средней мощности сигнала, содержащего только гармоники ФОР. В ходе экспериментов на математической модели нескольких типов асинхронных двигателей было показано, что для оценки величины средней мощности достаточно принять во внимание только значения амплитуд нижней и верхней боковых полос первых пяти гармоник ФОР, исключая верхнюю боковую полосу гармоники ФОР, порядок которой равен числу пар полюсов электродвигателя, так как частота этой составляющей гармоники ФОР совпадает с основной частотой сети 50 Гц, а также боковые полосы гармоник ФОР, частоты которых совпадают с частотами верхней или нижней боковых полос ГЭР первого порядка, так как влияние динамического эксцентриситета ротора на амплитуды этих гармонических составляющих может оказаться более значимым, чем влияние оборванного стержня в обмотке ротора. Средняя мощность такого сигнала, согласно равенству Парсеваля, определяется как:

где Аν- - амплитуда нижней боковой полосы гармоник ФОР ν-го порядка;
Aν+ - амплитуда верхней боковой полосы гармоник ФОР ν-го порядка.
Пороговое значение средней мощности сигнала, содержащего указанные выше гармоники ФОР, превышение которого свидетельствует о наличии оборванных стержней в обмотке ротора, определяется путем моделирования внешнего магнитного поля асинхронного двигателя с одним оборванным стержнем в специализированных программах (например, программном комплексе Ansys) и вычисления средней мощности сигнала (зависимости радиальной составляющей индукции внешнего магнитного поля от времени), в котором присутствуют только указанные выше гармоники ФОР. При большем количестве оборванных стержней средняя мощность сигнала становится еще выше, что видно из данных табл. №2 и №3. Пороговое значение определяется по формуле

где
Рпорог - пороговое значение средней мощности сигнала, содержащего указанные выше гармоники ФОР;
Рср.ФОР.мод - значение средней мощности сигнала, содержащего указанные выше гармоники ФОР, для модели двигателя с одним оборванным стержнем.
Коэффициент 0.7 учитывает погрешность расчета средней мощности сигнала при математическом моделировании с помощью специализированной программы.
Способ реализуется следующим образом.
Посредством внешнего датчика магнитного поля (например, датчика Холла), устанавливаемого на корпус электродвигателя в зоне середины длины сердечника статора, осуществляют запись сигнала радиальной составляющей индукции внешнего магнитного поля. Сигнал оцифровывают, затем формируют вектор амплитудного спектра, по максимуму амплитуды радиальной составляющей индукции внешнего магнитного поля определяют частоту сети. Удаляют из сигнала гармоническую составляющую частоты сети. Формируют диапазоны частот нижней и верхней боковых полос ГЭР первого порядка, границы которых определяются при значениях скольжений s=0 и s=1,5sном, где sном - номинальное скольжение электродвигателя, 1,5sном - максимальное значение скольжения с учетом перегрузки и допустимого отклонения скольжения от номинального при номинальной нагрузке машины.
Первый диапазон:
 , где
, где  - частота, соответствующая верхней границе диапазона для нижней боковой полосы ГЭР первого порядка;
- частота, соответствующая верхней границе диапазона для нижней боковой полосы ГЭР первого порядка;
 , где
, где  - частота, соответствующая нижней границе диапазона для нижней боковой полосы ГЭР первого порядка.
- частота, соответствующая нижней границе диапазона для нижней боковой полосы ГЭР первого порядка.
Второй диапазон:
 , где
, где  - частота, соответствующая верхней границе диапазона для верхней боковой полосы ГЭР первого порядка;
- частота, соответствующая верхней границе диапазона для верхней боковой полосы ГЭР первого порядка;
 , где
, где  - частота, соответствующая нижней границе диапазона для верхней боковой полосы ГЭР первого порядка.
- частота, соответствующая нижней границе диапазона для верхней боковой полосы ГЭР первого порядка.
В данных диапазонах находят частоты, обусловленные верхней и нижней боковыми полосами ГЭР первого порядка, имеющими наибольшую амплитуду. Если двигатель имеет две и более пары полюсов, то ГЭР первого порядка будет содержать частоты как нижней, так и верхней боковых полос, если одну пару, то только частоту верхней боковой полосы.
Для двигателей с двумя и более парами полюсов по двум частотам боковых полос ГЭР первого порядка осуществляют расчет величины скольжения ротора асинхронного электродвигателя с последующим осреднением результата. Для двигателей с одной парой полюсов расчетное значение скольжения определяют по одной частоте верхней боковой полосы ГЭР первого порядка.
Определяют расчетные значения частот нижних  и верхних
и верхних  боковых полос первых пяти гармоник ФОР по выражениям (1) и (2), исключая верхнюю боковую полосу гармоники ФОР, порядок которой равен числу пар полюсов электродвигателя, а также боковые полосы гармоник ФОР, частоты которых совпадают с частотами верхней или нижней боковых полос гармоники эксцентриситета ротора первого порядка, присутствующими в регистрируемом сигнале внешнего магнитного поля.
боковых полос первых пяти гармоник ФОР по выражениям (1) и (2), исключая верхнюю боковую полосу гармоники ФОР, порядок которой равен числу пар полюсов электродвигателя, а также боковые полосы гармоник ФОР, частоты которых совпадают с частотами верхней или нижней боковых полос гармоники эксцентриситета ротора первого порядка, присутствующими в регистрируемом сигнале внешнего магнитного поля.
С помощью метода автокоррекции времени записи сигнала определяют точные значения указанных выше частот. Частоты в этом случае определяются в диапазон от  до
до  для нижних боковых полос и
для нижних боковых полос и  до
до  для верхних боковых полос, где
для верхних боковых полос, где
 ,
,  - расчетное значение частот нижней и верхней боковых полос ν-ой гармоники ФОР соответственно;
- расчетное значение частот нижней и верхней боковых полос ν-ой гармоники ФОР соответственно;
 - шаг по частоте амплитудного спектра;
- шаг по частоте амплитудного спектра;
Тзап - время записи сигнала.
Определяют амплитуды указанных выше составляющих гармоник ФОР. Определяют среднюю мощность сигнала внешнего магнитного поля, который состоит только из указанных выше составляющих гармоник ФОР по выражению (3), после чего полученное значение сравнивают с пороговым значением для данного типа асинхронного электродвигателя, которое определяют по выражению (5).
Способ обнаружения обрывов стержней короткозамкнутых обмоток роторов асинхронных электродвигателей был реализован на базе персонального компьютера и опробован на асинхронном электродвигателе типа 3ВР71-2, паспортные данные которого приведены в таблице №1. Была выполнена модель этого асинхронного двигателя в программном комплексе Ansys для определения порогового значения.
Пример. Испытание работы заявленного способа на асинхронном электродвигателе 3ВР71-2.
Запись сигнала осуществлялась с помощью датчика магнитного поля, расположенного на корпусе электродвигателя в зоне середины длины сердечника статора. Для создания нагрузки на валу электродвигателя и возможности ступенчатого ее изменения, к испытуемой машине был присоединен с помощью муфты генератор постоянного тока. Сигнал оцифровывали с помощью аналого-цифрового преобразователя (АЦП). Частота дискретизации АЦП 10 кГц. Продолжительность времени записи сигнала составила 5 сек.
В ходе исследования использовались исправный ротор и ротор с одним оборванным стержнем. Для асинхронного двигателя ЗВР71-2 с этими роторами определены величины средней мощности внешнего магнитного поля по выражению (3).
Первоначально по выражению (4) было определено пороговое значение средней мощности сигнала внешнего магнитного поля асинхронного двигателя ЗВР71-2 на модели, созданной в Ansys Maxwell. Результаты расчета приведены в таблице №2. Видно, что при появлении неисправности асинхронного двигателя происходит значительный рост средней мощности сигнала индукции внешнего магнитного поля. Также можно отметить и то, что при большем количестве оборванных стержней значение средней мощности сигнала продолжает возрастать.
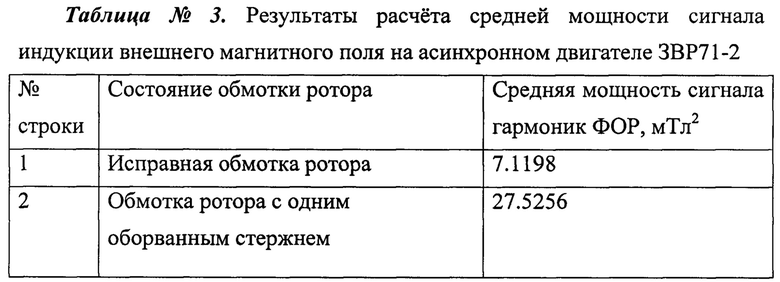
Результаты расчета на реальном асинхронном двигателе приведены в таблице №3. При сравнении результатов, приведенных в таблицах 2 и 3, видно, что значения средней мощности сигнала на математической и физической моделях достаточно близки. Кроме того, при наличии оборванных стержней значение средней мощности сигнала превышает граничное значение, равное 17.46 мТл2 (по выражению 4), а при исправном роторе средняя мощность значительно ниже порогового значения. Это говорит об эффективности разработанного способа обнаружения оборывов стержней короткозамкнутых обмоток роторов асинхронных электродвигателей.
Таким образом, предлагаемый способ позволяет заметно уменьшить требуемое время записи сигнала (с 30с в прототипе до 5с) за счет применения метода автокоррекции времени записи сигнала для определения частоты сети и ее амплитуды, а также частот и амплитуд боковых полос ГЭР первого порядка и гармоник ФОР. Это в свою очередь позволяет снизить вероятность получения неверных результатов по причине появления во время регистрации сигнала внешнего магнитного поля переходных режимов работы двигателя. Также предлагаемый способ обеспечивает повышение достоверности результатов проведения контроля состояния обмотки ротора за счет более точного определения пороговых значений, характеризующих наличие оборванных стержней в обмотке ротора, с помощью определения их значений на математических моделях для конкретного типа электродвигателя. Для математического моделирования можно использовать специализированные программы (например, программный комплекс Ansys). Применение заявляемого способа позволяет повысить удобство при проведении измерений за счет использования для регистрации индукции внешнего магнитного поля электродвигателей разных габаритов одного датчика (например, датчика Холла) и установки датчика не в торцевой зоне асинхронного двигателя, у которого со стороны свободного торца расположена система охлаждения (например, кожух с вентилятором), а на корпусе электродвигателя в зоне середины длины сердечника статора.


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2018 |
|
RU2687881C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТОЙ ОБМОТКИ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И ИХ КОЛИЧЕСТВА | 2017 |
|
RU2654972C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПО ТОКУ СТАТОРА | 2014 |
|
RU2559162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2019 |
|
RU2724988C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2786379C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2791428C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОВЫШЕННОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2024 |
|
RU2823095C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |
| Способ диагностики повреждения короткозамкнутой обмотки ротора асинхронного двигателя | 2016 |
|
RU2644576C2 |
Изобретение относится к области контроля технического состояния асинхронных электродвигателей и может быть использовано для обнаружения обрывов стержней обмоток роторов. Сущность: регистрируют радиальную составляющую индукции внешнего магнитного поля датчиком, установленным на корпусе электродвигателя в зоне середины длины сердечника статора. Определяют амплитудный спектр зарегистрированного сигнала, максимум амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети. Определяют точное значение частоты сети, скольжение ротора, значения частот и амплитуд гармоник, которые характерны для поврежденной обмотки ротора. В зарегистрированном сигнале точное значение частоты сети определяют по методу автокоррекции времени записи сигнала. Из сигнала удаляют гармонику с частотой сети. Определяют значения частот верхней и нижней боковых полос первой гармоники от эксцентриситета ротора по методу автокоррекции времени записи сигнала. Скольжение ротора определяют по точному значению частоты сети и значениям частот верхней и нижней боковых полос первой гармоники от эксцентриситета ротора. Затем вычисляют частоты нижней и верхней боковых полос первых пяти гармоник от фиктивной обмотки ротора, которые принимают в качестве гармоник, характерных для поврежденной обмотки ротора, исключая верхнюю боковую полосу гармоники фиктивной обмотки ротора, порядок которой равен числу пар полюсов электродвигателя, а также боковые полосы гармоник от фиктивной обмотки ротора, частоты которых совпадают с частотами верхней или нижней боковых полос гармоники эксцентриситета ротора первого порядка. По методу автокоррекции времени записи сигнала определяют значения амплитуды этих боковых полос гармоник. По полученным значениям амплитуд вычисляют среднюю мощность сигнала, сравнивают с пороговым значением и формируют сигнал о наличии или отсутствии повреждения обмотки ротора. Технический результат: повышение достоверности и удобства обнаружения обрывов стержней.
Способ обнаружения обрывов стержней короткозамкнутых обмоток роторов асинхронных электродвигателей, включающий цифровую регистрацию диагностического сигнала во времени, определение с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определение максимума амплитудного спектра и соответствующей ему частоты, которая близка по значению к частоте сети, определение точного значения частоты сети, определение скольжения ротора электродвигателя, определение значений частот и амплитуд гармоник, которые характерны для поврежденной обмотки ротора, отличающийся тем, что в качестве регистрируемого сигнала используют радиальную составляющую индукции внешнего магнитного поля, регистрацию которой осуществляют датчиком магнитного поля, устанавливаемым на корпусе электродвигателя в зоне середины длины сердечника статора, в зарегистрированном сигнале точное значение частоты сети определяют по методу автокоррекции времени записи сигнала, из сигнала удаляют гармонику с частотой сети, определяют значения частот первой гармоники от эксцентриситета ротора по методу автокоррекции времени записи сигнала, скольжение ротора определяют по точному значению частоты сети и значениям частот первой гармоники от эксцентриситета ротора, затем вычисляют частоты нижней и верхней боковых полос первых пяти гармоник от фиктивной обмотки ротора, определяемых по выражениям  и
и  ,
,
где
 - частота сети, Гц;
- частота сети, Гц;
s - скольжение ротора;
p - число пар полюсов двигателя;
ν=1, 2, 3, 4, 5 - порядок гармоники;
ν- - нижняя боковая полоса гармоники ν-го порядка;
ν+ - верхняя боковая полоса гармоники ν-го порядка;
 - частота нижней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц,
- частота нижней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц,
 - частота верхней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц;
- частота верхней боковой полосы гармоники фиктивной обмотки ротора ν-го порядка, Гц;
которые принимают в качестве гармоник, характерных для поврежденной обмотки ротора, исключая верхнюю боковую полосу гармоники фиктивной обмотки ротора, порядок которой равен числу пар полюсов электродвигателя, а также боковые полосы гармоник фиктивной обмотки ротора, частоты которых совпадают с частотами верхней или нижней боковых полос гармоники эксцентриситета ротора первого порядка, по методу автокоррекции времени записи сигнала определяют значения амплитуды этих боковых полос гармоник, по полученным значениям амплитуд вычисляют среднюю мощность сигнала, полученное значение сравнивают с пороговым значением и формируют сигнал о наличии или отсутствии повреждения обмотки ротора.
| Способ контроля обрыва стержня ротора короткозамкнутого асинхронного электродвигателя | 1983 |
|
SU1121633A1 |
| Устройство для испытаний короткозамкнутых обмоток роторов асинхронных электродвигателей | 1987 |
|
SU1449944A1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМИ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2005 |
|
RU2300116C2 |
| СЕЯЛКА | 1996 |
|
RU2113780C1 |
| US 6308140 B1, 23.10.2001 | |||
| US 4761703, 02.08.1988 | |||
| А | |||
| Н | |||
| НАЗАРЫЧЕВ и др., Экспериментальное исследование внешнего магнитного поля асинхронного электродвигателя для контроля обрыва стержней которкозамкнутой обмотки ротора, Вестник ИГЭУ, вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

