Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения электродвигателя.
Известны следующие способы определения скольжения (ГОСТ 7217-87 (2003) Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний. - Введ. 1988-01-01. - М.: Изд-во стандартов, 1987. - 53 с.:
- стробоскопический способ: для этого на валу двигателя наносят метки, число которых равно числу пар полюсов. Освещая вал стробоскопической лампой, питаемой от той же сети, что и испытуемый двигатель, измеряют время прохождения определенного количества меток мимо неподвижного указателя, считая прохождение метки в момент пуска секундомера за нулевое. Скольжение s находится как отношение удвоенного числа оборотов диска при освещении газоразрядной лампой к промежутку времени, за который зачерненный диск совершал обороты;
- способ определения скольжения при помощи индуктивной катушки: катушку размещают у торца двигателя, предварительно определив положение, при котором стрелка гальванометра совершает наиболее заметные качания, и измеряют время определенного количества колебаний.
Указанные способы малопригодны для их использования в рабочем режиме, так как требуют установки вблизи высоковольтной обмотки статора или на валу асинхронного электродвигателя дополнительных устройств. Поэтому они нашли применение только при проведении испытаний на выведенном в ремонт двигателе.
В качестве прототипа принят «Способ определения скольжения ротора асинхронного электродвигателя» (патент Российской Федерации на изобретение №2441249, МПК G01R 31/34, 2012), включающий оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, выделение с помощью двух полосовых фильтров основной гармоники и высокочастотной составляющей сигнала потребляемого тока, в которой имеются зубцовые гармонические ротора (ЗГР) первого порядка, вычисление по основной гармонике частоты сети, определение границы диапазонов для поиска частот, обусловленных зубцовыми гармоническими ротора первого порядка, исключение из диапазонов частот, вызванных насыщением магнитопроводов ротора и датчика тока, нахождение частот зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам ЗГР первого порядка.
Недостатками этого способа являются необходимость получения информации о числе стержней обмотки ротора. На многих работающих двигателях (особенно старого образца) ее можно получить только путем разборки двигателя, и то, что для достижения высокой точности измерения скольжения требуется значительное время записи сигнала, вплоть до нескольких минут. За это время может произойти изменение нагрузки, смещение датчика и ряд других явлений, приводящих к потере точности измерения.
Техническим результатом предлагаемого изобретения является повышение точности получаемого результата, при равных значениях времени записи сигнала, и помехозащищенности, при одинаковых допустимых погрешностях измерения.
Технический результат достигается тем, что в способе определения скольжения ротора асинхронного электродвигателя, включающем оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, с помощью быстрого преобразования Фурье получают амплитудный спектр зарегистрированного сигнала, определяют максимум амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точное значение частоты сети, по полученному значению частоты сети и числу пар полюсов электродвигателя вычисляют границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, на каждом из полученных диапазонов определяют максимум амплитудных спектров и соответствующие им частоты, которые близки по значению к частотам гармоник от эксцентриситета ротора первого порядка, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точные значения частот гармоник от эксцентриситета ротора первого порядка, по которым получают для двигателей с одной парой полюсов одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов - два значения скольжения ротора, вычисляют скольжение ротора такового асинхронного электродвигателя по среднему арифметическому данных значений.
Сущность способа заключается в следующем.
Известно, что магнитное поле в воздушном зазоре асинхронного двигателя изменяется не строго по синусоидальному закону, поэтому при разложении в ряд Фурье токового сигнала в нем обнаруживаются гармоники, имеющие частоту, отличную от частоты питающей сети. Согласно (Геллер Б., Гамата В. Высшие гармоники в асинхронных машинах / Пер. с англ. Под ред. З.Г. Каганова. - М.: Энергия, 1981. - 352 с., ил.) источниками временных гармоник магнитного поля в воздушном зазоре, которые несут информацию о скольжении, являются зубчатость ротора и дискретное расположение стержней по обмотке ротора, а также эксцентриситет ротора.
Эксцентриситет ротора обусловлен неточностями в процессе производства и сборки, а также износом механической части двигателя. Он бывает статическим и динамическим, однако в реальных двигателях всегда присутствуют оба вида эксцентриситета, что является причиной появления гармоник эксцентриситета ротора. Так как эти гармоники всегда присутствуют в магнитном поле тока статора, то по ним возможно определение скольжения.
В прототипе предлагается для определения скольжения рассчитывать частоты ЗГР первого порядка и по значению полученных частот определять скольжение.
Однако определение скольжения по частотам гармоник эксцентриситета ротора (ГЭР) первого порядка имеет существенные преимущества, одно из которых является исключение из списка исходных данных труднодоступных параметров (числа стержней ротора). Из конструктивных параметров требуется всего один - число пар полюсов, который легко определяется по значению синхронной частоте вращения ротора.
Единственным недостатком определения скольжения по ГЭР является то, что требуется очень большое время записи сигнала для точного определения частоты. Например, согласно (Скоробогатов А.А. Разработка методов контроля состояния короткозамкнутых обмоток роторов электродвигателей собственных нужд электростанций, диссертация на соискание ученой степени кандидата технических наук, Иваново, 2006) для определения скольжения высоковольтных электродвигателей с погрешностью не более 5% минимальное время записи составляет порядка нескольких минут).
Заявленный способ позволяет определять значение скольжения по ГЭР первого порядка, присутствующим в токе статора, за малый промежуток времени записи без потери точности. Кроме того, в отличие от прототипа не требуется труднодоступная информация о числе стержней обмотки ротора.
В предлагаемом способе определение скольжения ротора асинхронного электродвигателя осуществляют путем регистрации мгновенной величины потребляемого электродвигателем тока J(t) во времени посредством датчика тока, установленного на одну из фаз кабеля питания электродвигателя, и последующей обработки токового сигнала.
Зарегистрированный токовый сигнал J(t) кроме основной гармоники также содержит гармоники, обусловленные ГЭР первого порядка. Частоты их зависят от параметров двигателя и могут быть определены по следующему выражению:
где 
Уменьшить временя записи тока без потери точности определения ГЭР первого порядка и частоты сети, необходимых для определения скольжения, позволяет способ автокоррекции времени записи сигнала (АВЗС), описанный в (А.Н. Назарычев, А.А. Скоробогатов, Е.М. Новоселов, С.Н. Литвинов.Повышение эффективности определения частотных составляющих при спектральном анализе сигналов / Вестник ИГЭУ; вып.5, - Иваново: ИГЭУ, 2013. С.29-37.
Тогда значение скольжения при определенных значениях частот ГЭР первого порядка и частоты сети определяется по выражениям:
Перечень графических иллюстраций применения предлагаемого способа:
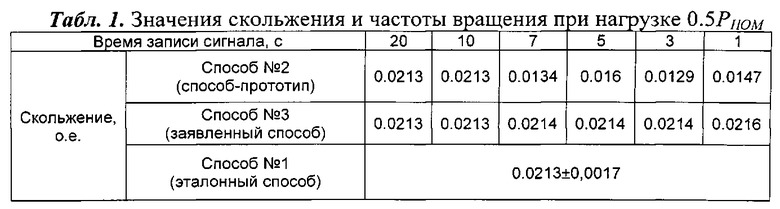
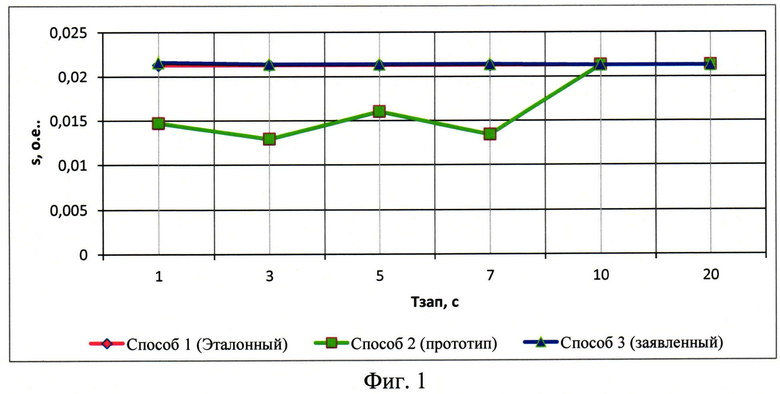
Фиг.1. - Зависимость точности определения скольжения от времени записи сигнала рассматриваемыми способами при нагрузке 0.5 PHOM;
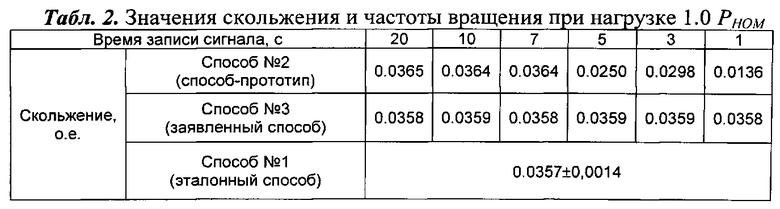
Фиг.2. - Зависимость точности определения скольжения от времени записи сигнала рассматриваемыми способами при нагрузке 1.0 PHOM.
Способ реализуется следующим образом. Посредством датчика тока, установленного на одну из фаз кабеля питания электродвигателя, осуществляют запись токового сигнала J(t). Сигнал J(t) потребляемого электродвигателем тока оцифровывают, затем формируют вектор амплитудного спектра, по максимуму амплитуды тока определяют частоту сети. При числе пар полюсов p>1 скольжение определяется следующим образом. Формируют два диапазона частот, границы которых определяются при скольжениях s=0 и s=1.5sном, где sном - номинальное скольжение электродвигателя, 1.5sном - максимальное значение скольжения с учетом перегрузки и допустимого отклонения скольжения от номинального при номинальной нагрузке машины.
Первый диапазон:
 где
где  - частота, соответствующая верхней границе первого диапазона, sном - номинальное скольжение электродвигателя;
- частота, соответствующая верхней границе первого диапазона, sном - номинальное скольжение электродвигателя;
 где
где  - частота, соответствующая нижней границе первого диапазона.
- частота, соответствующая нижней границе первого диапазона.
Второй диапазон:
 где
где  - частота, соответствующая верхней границе второго диапазона;
- частота, соответствующая верхней границе второго диапазона;
 где
где  - частота, соответствующая нижней границе второго диапазона.
- частота, соответствующая нижней границе второго диапазона.
В данных диапазонах находят частоты, обусловленные ГЭР первого порядка, имеющие наибольшую амплитуду, а также частоту сети с использованием способа АВЗС.
По двум частотам ГЭР первого порядка осуществляют расчет двух величин скольжения ротора. По среднему арифметическому данных величин вычисляют скольжение ротора асинхронного электродвигателя:
При p=1 скольжение определяется только по выражению:
Пример 1. Способ определения величины скольжения ротора асинхронного электродвигателя изначально реализован на базе персонального компьютера и опробован на асинхронном электродвигателе.
Паспортные данные двигателя: Рном=250 Вт - номинальная нагрузка; Zp=19 - число зубцов ротора; p=1 - число пар полюсов.
Для создания нагрузки на валу электродвигателя и возможности ступенчатого ее изменения к экспериментальному двигателю был присоединен с помощью муфты генератор постоянного тока. Запись сигнала осуществлялась с помощью датчика тока, расположенного на одной из фаз питающего кабеля электродвигателя, при следующих нагрузках на валу ротора: 0,5РНОМ и РНОМ, где РНОМ - номинальная мощность асинхронного двигателя. Сигнал оцифровывают с помощью аналого-цифрового преобразователя (АЦП).
Для измерения частоты сети используется частотомер Ф5043, подключенный на линейное напряжение. Погрешность его измерений составляет ± 0,1% для диапазона 45-55 Гц. Частоту вращения вала ротора электродвигателя определяют с помощью оптического тахометра АТ-8. Погрешность его измерений составляет 0,05%.
В ходе исследования на экспериментальном двигателе было произведено измерение скольжения следующими способами:
1. Способ №1 (эталонный способ). В данном способе определяли значение скольжения, принимаемое за эталонное (точное). Для этого с помощью оптического тахометра определялось значение частоты вращения ротора, а с помощью частотометра - значение частоты питающей сети. Инструментальная погрешность данного способа составляет примерно 4% при номинальной нагрузке двигателя (Рном) и 8% при нагрузке 0,5 от номинальной (0,5·Рном).
2. Способ №2 (способ-прототип). Второй способ позволяет определить скольжение по значениям ЗГР первого порядка и частоты питающей сети, присутствующими в токе статора. Данный способ является прототипом разрабатываемого.
3. Способ №3 (заявленный способ). Третий способ позволяет определить скольжение по значению ГЭР первого порядка, и частоты питающей сети, присутствующими в токе статора, с применением алгоритма АВЗС.
Измерения проводились при различных нагрузках на валу ротора. Частота дискретизации АЦП 10 кГц. Продолжительность времени записи сигнала изменялась от 1 до 20 с.
Результаты определения скольжения по указанным способам приведены в табл.1-2. Для наглядности на фиг.1-2 также представлены зависимости изменения точности определения скольжения от величины времени записи сигнала при различной нагрузке на валу ротора.
Анализ полученных результатов показал следующее:
1. Уменьшение времени записи приводит к заметному снижению точности определения скольжения и частоты вращения ротора по ЗГР и ГЭР без применения алгоритма АВЗС. Данный факт особенно заметен при длительностях времени записи сигнала, не превышающих 10 с. Значения погрешностей определения указанных выше параметров значительно превосходят значения инструментальных погрешностей, обусловленные погрешностями измерительных приборов.
2. Уменьшение времени записи вплоть до 1 с не оказало значительного влияния на результат измерения при определении скольжения и частоты вращения ротора по ГЭР с применением алгоритма АВЗС. Значения погрешностей определения указанных выше параметров не превышают значения инструментальных погрешностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТЫХ ОБМОТОК РОТОРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2017 |
|
RU2650821C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТОЙ ОБМОТКИ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И ИХ КОЛИЧЕСТВА | 2017 |
|
RU2654972C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2018 |
|
RU2687881C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОВЫШЕННОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2024 |
|
RU2823095C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2791428C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2019 |
|
RU2724988C1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМИ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2005 |
|
RU2300116C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2786379C1 |
Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения электродвигателя. В способе определения скольжения ротора асинхронного электродвигателя, включающем оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, с помощью быстрого преобразования Фурье получают амплитудный спектр зарегистрированного сигнала, определяют максимум амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точное значение частоты сети, по полученному значению частоты сети и числу пар полюсов электродвигателя вычисляют границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, на каждом из полученных диапазонов определяют максимум амплитудных спектров и соответствующие им частоты, которые близки по значению к частотам гармоник от эксцентриситета ротора первого порядка, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точные значения частот гармоник от эксцентриситета ротора первого порядка, по которым получают для двигателей с одной парой полюсов одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов - два значения скольжения ротора, вычисляют скольжение ротора такового асинхронного электродвигателя по среднему арифметическому данных значений. Технический результат заключается в повышении точности определения величины скольжения. 2 ил.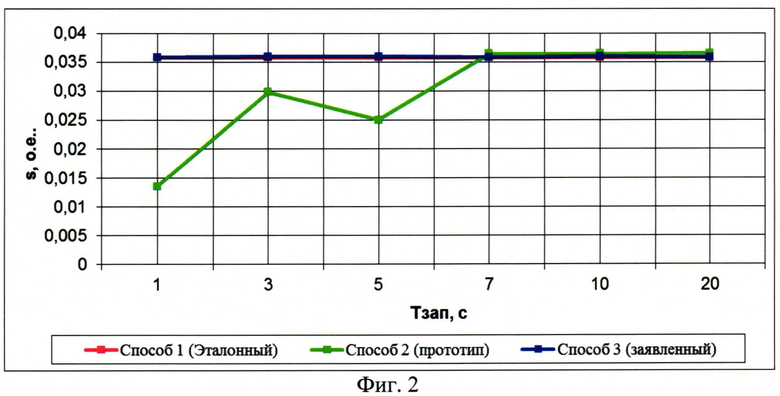
Способ определения скольжения ротора асинхронного электродвигателя, включающий оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, отличающийся тем, что с помощью быстрого преобразования Фурье получают амплитудный спектр зарегистрированного сигнала, определяют максимум амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точное значение частоты сети, по полученному значению частоты сети и числу пар полюсов электродвигателя вычисляют границы одного диапазона частот для двигателей с одной парой полюсов либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, на каждом из полученных диапазонов определяют максимум амплитудных спектров и соответствующие им частоты, которые близки по значению к частотам гармоник от эксцентриситета ротора первого порядка, с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения определяют точные значения частот гармоник от эксцентриситета ротора первого порядка, по которым получают для двигателей с одной парой полюсов одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов - два значения скольжения ротора, вычисляют скольжение ротора такового асинхронного электродвигателя по среднему арифметическому данных значений.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2209442C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОЛЬЖЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2005 |
|
RU2299442C1 |
| ТРАНСПОРТНОЕ ПОЛОТНО | 2009 |
|
RU2431714C1 |

