Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения электродвигателя.
Широко известны способы определения скольжения асинхронных электродвигателей с короткозамкнутым ротором (ГОСТ 7217-87 (СТ СЭВ 168-85). Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний. - Введ. 1988-01-01. - М.: Изд-во стандартов, 1987. - 53 с.):
- стробоскопический способ: для этого на валу двигателя наносят метки, число которых равно числу пар полюсов. Освещая вал стробоскопической лампой, питаемой от той же сети, что и испытуемый двигатель, измеряют время прохождения определенного количества меток мимо неподвижного указателя, считая прохождение метки в момент пуска секундомера за нулевое,
- способ определения скольжения при помощи индуктивной катушки: катушку размещают у торца асинхронного электродвигателя, предварительно определив положение, при котором стрелка гальванометра совершает наиболее заметные качания, и измеряют время определенного количества колебаний.
Данные способы малопригодны для их использования в рабочем режиме, так как требуют установки вблизи высоковольтной обмотки статора или на валу асинхронного электродвигателя дополнительных элементов. Поэтому они нашли применение только при проведении испытаний на выведенном в ремонт двигателе.
В качестве прототипа принят «Способ определения скольжения ротора асинхронного электродвигателя …» (патент Российской Федерации на изобретение №2209442, МПК G01R 31/34, 2003 г.), позволяющий определить скольжение в рабочем режиме. Он основан на выделении с помощью преобразования Гильберта из фазного тока статора низкочастотной огибающей, имеющей двойную частоту скольжения 2(fc-fвp), где fc - частота сети, fвp - частота вращения ротора, и далее с помощью преобразования Фурье, определив частоту колебаний огибающей и приняв частоту сети равной 50 Гц, рассчитывают значение скольжения.
Недостатками этого способа являются:
- низкая достоверность получаемой величины скольжения, так как в качестве источника, несущего информацию о величине скольжения, принята низкочастотная огибающая потребляемого тока, которая может отсутствовать (при магнитной и электрической симметрии асинхронного электродвигателя (сопротивления стержней обмотки ротора равны, равномерный воздушный зазор между статором и ротором)) или быть обусловлена низкочастотными колебаниями нагрузки;
- необходимость многократного повторения измерений для получения более достоверного значения скольжения (второй недостаток вытекает из первого);
- низкая точность определяемой величины скольжения при отклонении частоты сети от 50 Гц.
Техническим результатом предлагаемого изобретения является повышение точности и достоверности получаемого результата, исключение необходимости проведения дополнительных измерений для получения достоверного значения скольжения.
Технический результат достигается тем, что в способе определения скольжения ротора асинхронного электродвигателя, включающем оценку величины скольжения ротора по графику зависимости скольжения от величины потребляемого тока при постоянном напряжении в сети, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, с помощью двух полосовых фильтров выделяют основную гармонику и высокочастотную составляющую сигнала потребляемого тока, в которой имеются зубцовые гармонические ротора первого порядка, вычисляют по основной гармонике частоту сети, затем определяют границы диапазонов для поиска частот, обусловленных зубцовыми гармоническими ротора первого порядка, после чего, исключив из диапазонов частоты, вызванные насыщением магнитопроводов ротора и датчика тока, находят частоты зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам зубцовых гармонических ротора первого порядка.
Сущность способа заключается в следующем. Известно, что в трехфазном асинхронном электродвигателе обмотки статора, за счет сдвига фаз между ними, возбуждают магнитное поле, вращающееся с частотой электрической сети fс (или кратной ей). Это поле индуктирует в короткозамкнутых стержнях ротора ток, который обуславливает вращение ротора. Частота вращения ротора асинхронного электродвигателя fвp в двигательном режиме несколько меньше частоты вращения магнитного поля статора. Разность частот fc-fвp является частотой скольжения ротора относительно поля статора, а отношение (fc-fвp)/fc - величиной скольжения s, которую выражают в долях единицы или в процентах. Магнитное поле в воздушном зазоре асинхронного двигателя изменяется не строго по синусоидальному закону, поэтому при разложении в ряд Фурье токового сигнала в нем обнаруживаются гармоники, имеющие частоту, отличную от частоты питающей сети. Наличие этих гармоник объясняется, в основном, конструктивными особенностями двигателя. Согласно (Геллер Б., Гамата В. Высшие гармоники в асинхронных машинах / Пер. с англ. Под ред. З.Г.Каганова. - М.: «Энергия», 1981. - 352 с., ил.) источниками временных гармоник магнитного поля в воздушном зазоре, которые несут информацию о скольжении, являются зубчатость ротора и дискретное расположение стержней по обмотке ротора. Гармоники от этих источников (в дальнейшем они называются зубцовые гармонические ротора (ЗГР)) существуют всегда в магнитном поле воздушного зазора, поэтому они пригодны для определения скольжения. В предлагаемом способе определение скольжения ротора асинхронного электродвигателя осуществляют путем регистрации мгновенной величины потребляемого электродвигателем тока J(t) во времени посредством датчика тока, установленного на одну из фаз кабеля питания электродвигателя, и последующей обработки токового сигнала. Зарегистрированный токовый сигнал J(t), кроме основной гармоники, также содержит гармоники, обусловленные ЗГР. Частоты их зависят от параметров двигателя и могут быть определены по следующему выражению:

где k - порядок гармоники, р - число пар полюсов, Zp - количество зубцов на роторе,  - гармоники ЗГР k-го порядка.
- гармоники ЗГР k-го порядка.
Перечень графических иллюстраций применения предлагаемого способа.
Фиг.1 - частоты ЗГР на спектрах потребляемого двигателем тока, при нагрузках Р=0,5·Рном, Р=Рном и Р=1,33·Рном, где Рном - номинальная мощность электродвигателя.
Фиг.2 - результаты измерения скольжения с помощью стробоскопа и по заявляемому способу.
Способ реализуется следующим образом. Посредством датчика тока, установленного на одну из фаз кабеля питания электродвигателя, осуществляют запись токового сигнала J(t). Полученный сигнал J(t) потребляемого электродвигателем тока оцифровывают, затем формируют вектор спектральной плотности мощности, по максимуму амплитуды тока определяют частоту сети. После этого формируют два диапазона частот, границы которых определяются при скольжениях s=0 и s=1.5sном, где sном - номинальное скольжение электродвигателя, 1.5sном - максимальное значение скольжения с учетом перегрузки и допустимого отклонения скольжения от номинального при номинальной нагрузке машины.
Первый диапазон:
где  - частота, соответствующая верхней границе первого диапазона;
- частота, соответствующая верхней границе первого диапазона;

где  - частота, соответствующая нижней границе первого диапазона.
- частота, соответствующая нижней границе первого диапазона.
Второй диапазон:

где  - частота, соответствующая верхней границе второго диапазона;
- частота, соответствующая верхней границе второго диапазона;
где  - частота, соответствующая нижней границе второго диапазона.
- частота, соответствующая нижней границе второго диапазона.
Из этих диапазонов исключают частоты, вызванные насыщением магнитопроводов двигателя и датчика тока, так как их амплитуды могут превышать амплитуды ЗГР;

где ν - порядок гармоники,  - частота гармоники, вызванной насыщением магнитопроводов двигателя и датчика тока ν-го порядка. В данных диапазонах находят частоты, обусловленные ЗГР первого порядка, как правило, имеющие наибольшую амплитуду (кроме того, частоты ЗГР одного и того же порядка всегда отличаются друг от друга на величину, равную удвоенной частоте питающей сети, что является одним из признаков правильного нахождения ЗГР).
- частота гармоники, вызванной насыщением магнитопроводов двигателя и датчика тока ν-го порядка. В данных диапазонах находят частоты, обусловленные ЗГР первого порядка, как правило, имеющие наибольшую амплитуду (кроме того, частоты ЗГР одного и того же порядка всегда отличаются друг от друга на величину, равную удвоенной частоте питающей сети, что является одним из признаков правильного нахождения ЗГР).

По двум найденным частотам ЗГР первого порядка осуществляют расчет величины скольжения ротора асинхронного электродвигателя с последующим осреднением результата. Для проверки достоверности определения скольжения производят сравнение значений скольжения, найденных по двум частотам ЗГР первого порядка. Разница между ними не должна превышать 5%.
где  - значение скольжения, определенное по меньшей из частот ЗГР первого порядка,
- значение скольжения, определенное по меньшей из частот ЗГР первого порядка,  - значение скольжения, определенное по большей из частот ЗГР первого порядка,
- значение скольжения, определенное по большей из частот ЗГР первого порядка,  - минимальное из полученных значений скольжений.
- минимальное из полученных значений скольжений.
Пример 1. Способ определения величины скольжения ротора асинхронного электродвигателя изначально реализован на базе персонального компьютера и опробован на асинхронном электродвигателе. Двигатель имел следующие паспортные данные: Рном=3 кВт - номинальная нагрузка; Zp=28 - число зубцов ротора; р=2 - число пар полюсов. Для создания нагрузки на валу электродвигателя и возможности ступенчатого ее изменения к испытуемой машине был присоединен с помощью муфты генератор постоянного тока. Запись сигнала осуществлялась с помощью датчика тока, расположенного на одной из фаз питающего кабеля электродвигателя. В результате обработки зарегистрированного сигнала по заявляемому способу были найдены частоты ЗГР первого порядка при трех различных нагрузках (фиг.1). Определенные по ЗГР величины скольжения (sЗГР) были сравнены со значениями, измеренными с помощью стробоскопа (sодс), который был использован в качестве образцового датчика скольжения. Как видно из результатов, представленных на фиг.2, погрешность определения скольжения по данному способу

не превышает 5%, однако она обусловлена не только погрешностью заявляемого способа, но и погрешностью измерения стробоскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПО ТОКУ СТАТОРА | 2014 |
|
RU2559162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТЫХ ОБМОТОК РОТОРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2017 |
|
RU2650821C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТОЙ ОБМОТКИ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И ИХ КОЛИЧЕСТВА | 2017 |
|
RU2654972C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОВЫШЕННОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2024 |
|
RU2823095C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2791428C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2018 |
|
RU2687881C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2019 |
|
RU2724988C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2786379C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2209442C2 |

Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения электродвигателя. Способ включает оценку величины скольжения ротора по графику зависимости скольжения от величины потребляемого тока, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, с помощью двух полосовых фильтров выделяют основную гармонику и высокочастотную составляющую сигнала потребляемого тока. Вычисляют по основной гармонике частоту сети, затем определяют границы диапазонов для поиска частот. После чего, исключив из диапазонов частоты, вызванные насыщением магнитопроводов ротора и датчика тока, находят частоты зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам зубцовых гармонических ротора первого порядка. Технический результат заключается в повышении точности и достоверности получаемого результата, исключении необходимости проведения дополнительных измерений для получения достоверного значения скольжения. 2 ил.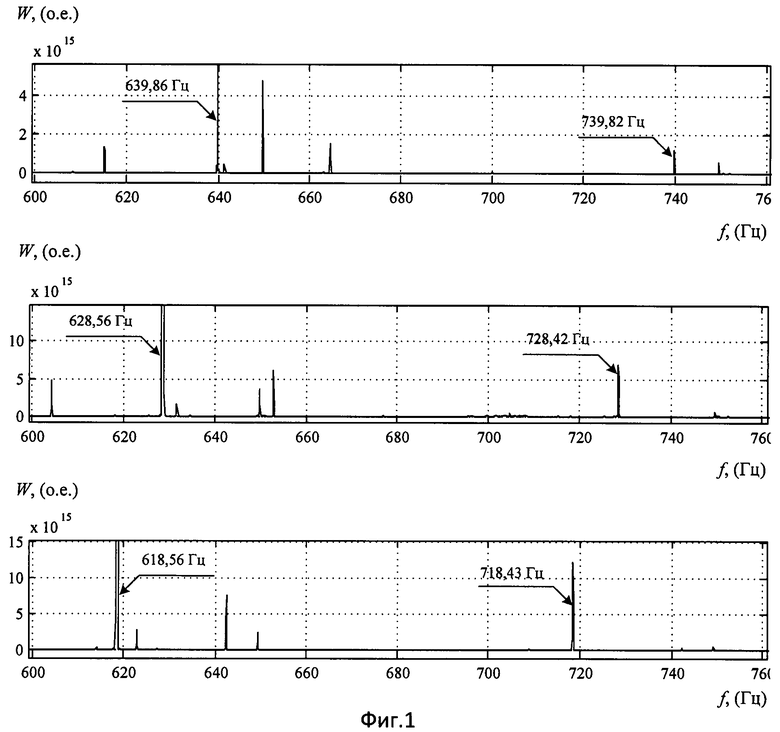
Способ определения скольжения ротора асинхронного электродвигателя, включающий оценку величины скольжения ротора, цифровую регистрацию мгновенной величины амплитуды потребляемого тока во времени на одной из фаз кабеля питания асинхронного электродвигателя, отличающийся тем, что с помощью двух полосовых фильтров выделяют основную гармонику и высокочастотную составляющую сигнала потребляемого тока, в которой имеются зубцовые гармонические ротора первого порядка, вычисляют по основной гармонике частоту сети, затем определяют границы диапазонов для поиска частот, обусловленных зубцовыми гармоническими ротора первого порядка, после чего, исключив из диапазонов частоты, вызванные насыщением магнитопроводов ротора и датчика тока, находят частоты зубцовых гармонических первого порядка, по которым получают два значения скольжения ротора, определяют скольжение ротора асинхронного электродвигателя по среднему арифметическому данных значений и делают заключение о достоверности результата путем сравнения двух величин скольжения, вычисленных по частотам зубцовых гармонических ротора первого порядка.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2209442C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2143121C1 |
| ВЫПУСКНОЕ УСТРОЙСТВО ЗЕРНОВОГО БУНКЕРА | 1992 |
|
RU2065394C1 |
| Косвенный способ определения механических и пусковых характеристик асинхронного электродвигателя | 1987 |
|
SU1499290A1 |

