Изобретение относится к области контроля технического состояния асинхронных электродвигателей и может быть использовано для обнаружения обрывов стержней обмоток роторов асинхронных электродвигателей.
Известны следующие способы контроля состояния обмоток роторов асинхронных электродвигателей:
Известен способ контроля состояния короткозамкнутой обмотки ротора по внешнему электромагнитному полю машины (Диагностирование обрыва стержня клетки ротора асинхронного электродвигателя / С.А. Волохов, П.Н. Добродеев, А.В. Кильдышев // Электротехника. - вып. №2. - 1998. - с. 13-15). Контроль производят в режиме короткого замыкания машины (ротор неподвижен) при пониженном напряжении. На корпусе машины устанавливают контрольно-измерительную магнитную систему с многополюсными намагничивающими и двухполюсными измерительными обмотками, измеряющую магнитный диполь внешнего электромагнитного поля асинхронного двигателя, который является диагностическим параметром обрыва стержня. У симметричной обмотки ротора магнитный диполь практически равен нулю, а при возникновении обрыва его величина становится значительной, что является диагностическим признаком повреждения «беличьей клетки».
Недостатком указанного способа является необходимость создания специального режима для электродвигателя - режима короткого замыкания при пониженном напряжении.
Другим способом контроля состояния обмотки ротора асинхронного электродвигателя является «Способ диагностики повреждения обмотки короткозамкнутого ротора асинхронного двигателя» (патент республики Казахстан на изобретение №21246, МПК Н02Н 7/08, H02K 11/00, 2009 г.), основанный на контроле параметров внешнего магнитного поля и формировании сигнала о результате диагностики, контроле во внешнем магнитном поле появления двух наиболее информативных боковых гармонических с частотами f0±Δf0, сравнении каждой из них с эталонной величиной, и формировании в случае превышения хотя бы одной из них установленной для каждой из них эталонной величины сигнала о повреждении обмотки короткозамкнутого ротора, где f0-fc/p⋅(s(±p+1)+1) - частота несущей гармонической, s - скольжение электродвигателя, р - число полюсов асинхронного двигателя, fc - частота основной гармонической сети, a Δf0=±pfcs.
Недостатками этого способа являются:
- необходимость установки датчика частоты вращения вала ротора электродвигателя, представляющего из себя прикрепленный к валу магнит и геркон, что увеличивает вероятность отказа системы контроля, а также увеличивает количество незапланированных остановок двигателя по причине задевания вала ротора за геркон;
- низкая достоверность результатов контроля, особенно для двигателей с двойной беличьей клеткой.
За прототип принят «Способ обнаружения обрывов стержней короткозамкнутых обмоток роторов асинхронных электродвигателей» (патент РФ №2650821, МПК G01R 31/34, 2018), основанный на цифровой регистрации сигнала радиальной составляющей индукции внешнего магнитного поля во времени, которая осуществляется датчиком магнитного поля, устанавливаемым на корпусе электродвигателя в зоне середины длины сердечника статора, определении с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определении максимума амплитудного спектра и соответствующей ему частоты, которая близка по значению к частоте сети, определении точного значения частоты сети по методу автокоррекции времени записи сигнала, удалении из сигнала гармоники с частотой сети, определении значений частот первой гармоники от эксцентриситета ротора по методу автокоррекции времени записи сигнала, определении скольжения ротора по точному значению частоты сети и значениям частот первой гармоники от эксцентриситета ротора, вычислении верхней и нижней боковых частот (в терминологии патента-прототипа применяется термин «частота нижней и верхней боковых полос») первых пяти гармоник от фиктивной обмотки ротора, определяемых по выражениям

где
ƒc - частота сети, Гц;
s - скольжение ротора;
p - число пар полюсов двигателя;
ν = 1, 2, 3, 4, 5 - порядок гармоники;
ν- - порядок гармоники ν-го порядка на нижней боковой частоте (в терминологии патента-прототипа применяется термин «нижняя боковая полоса гармоники ν-го порядка»);
ν+ - порядок гармоники ν-го порядка на верхней боковой частоте (в терминологии патента-прототипа применяется термин «верхняя боковая полоса гармоники ν-го порядка»);
 - нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц,
- нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц,
 - верхняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц;
- верхняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц;
принимаемых в качестве гармоник, характерных для поврежденной обмотки ротора, исключая гармонику фиктивной обмотки ротора на верхней боковой частоте, порядок которой равен числу пар полюсов электродвигателя, а также гармоники фиктивной обмотки ротора на частотах, которые совпадают с верхней или нижней боковыми частотами гармоники эксцентриситета ротора первого порядка, определении по методу автокоррекции времени записи сигнала значений амплитуд этих гармоник, вычислении по полученным значениям амплитуд средней мощности сигнала, сравнении полученного значения с пороговым значением и формировании сигнала о наличии или отсутствии повреждения обмотки ротора.
Недостатком этого способа является низкая достоверность результатов контроля вследствие:
- необходимости регистрации сигнала в установившемся режиме при нагрузке на валу, близкой к номинальной. В ином случае невозможно определить точные значения амплитуд искомых гармонических составляющих из-за их очень малых значений и влияния эффекта растекания спектра. Кроме того, очень затруднителен контроль асинхронных двигателей с двойной беличьей клеткой, так как в установившемся режиме основная масса тока протекает по рабочей обмотке ротора;
- возможности получения неверных результатов о присутствии оборванных стержней в обмотке ротора при наличии динамического эксцентриситета ротора.
Техническим результатом предлагаемого способа является повышение достоверности результатов контроля при расширении функциональных возможностей.
Технический результат достигается тем, что в способе выявления оборванных стержней в короткозамкнутой обмотке ротора асинхронного электродвигателя, включающем цифровую регистрацию радиальной составляющей индукции внешнего магнитного поля во времени с помощью датчика магнитного поля, устанавливаемого на корпусе электродвигателя в зоне середины длины сердечника статора, указанный выше сигнал регистрируют в режиме пуска, разделяют его на интервалы, на каждом из этих интервалов производят оконное преобразование Фурье, при этом продолжительность интервалов выбирают с учетом числа пар полюсов асинхронного двигателя, а также ширины главного лепестка используемого окна преобразования Фурье, получают частотно-временной спектр, определяют в этом спектре наличие гармонических составляющих фиктивной обмотки ротора на нижних боковых частотах, определяемых по выражению:  где
где
 - нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка Гц,
- нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка Гц,
t - текущее время при пуске, 0≤t≤Т, с,
Т - продолжительность пуска асинхронного двигателя, с;
ƒс - частота сети, Гц,
s(i) - скольжение ротора;
p - число пар полюсов двигателя;
ν - порядок гармоники,
при наличии указанных гармонических составляющих формируют сигнал о наличии обрыва стержня обмотки ротора.
Перечень графических иллюстраций
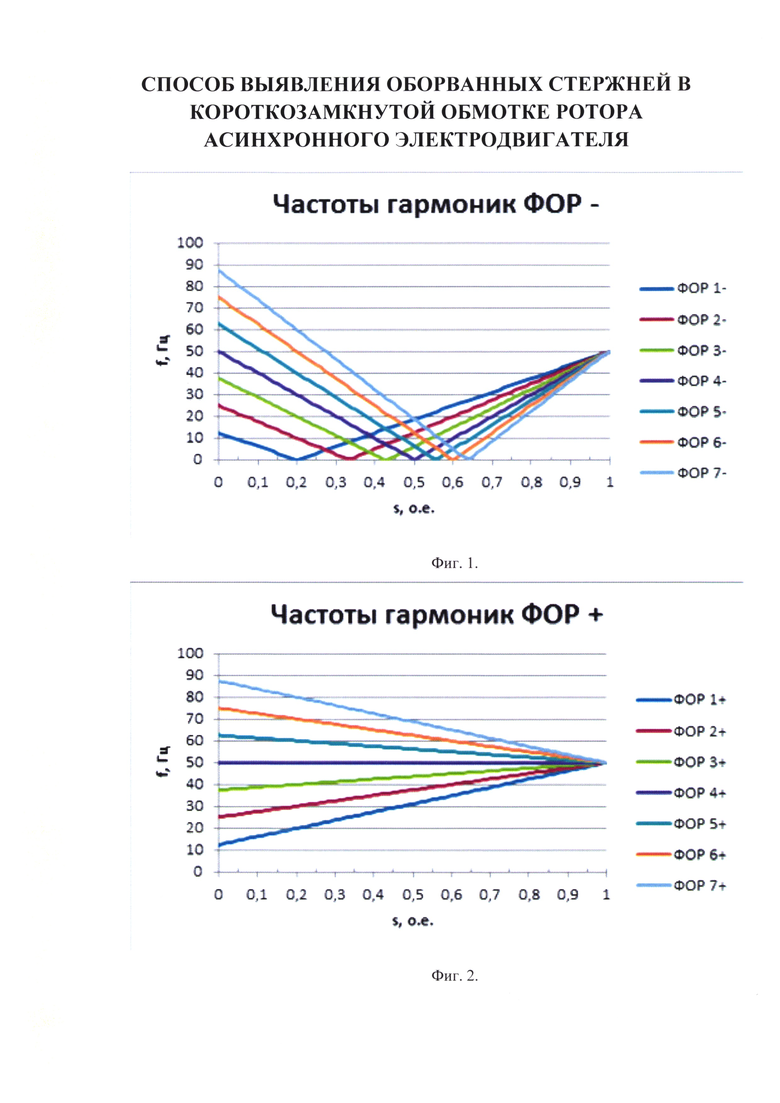
На фиг. 1 приведены зависимости нижних боковых частот гармоник фиктивной обмотки ротора 1-7 порядков при изменении скольжения от 0 до 1 для асинхронного двигателя с 4 парами полюсов.
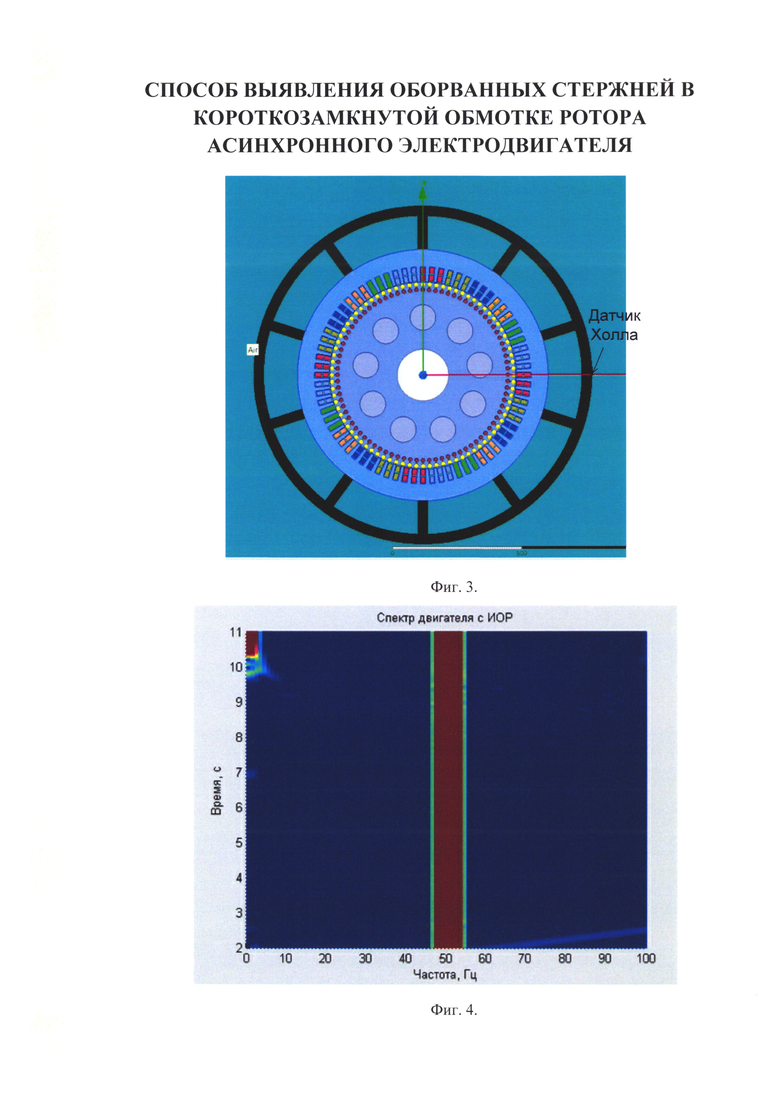
На фиг. 2 приведены зависимости верхних боковых частот гармоник фиктивной обмотки ротора 1-7 порядков при изменении скольжения от 0 до 1 для асинхронного двигателя с 4 парами полюсов.
На фиг. 3 приведена математическая модель двигателя ДАМСО-15-12-8 в программном комплексе ANSYS.
На фиг. 4 приведен частотно-временной спектр внешнего магнитного поля математической модели исправного асинхронного двигателя ДАМСО-15-12-8;
На фиг. 5 приведен частотно-временной спектр внешнего магнитного поля математической модели асинхронного двигателя ДАМСО-15-12-8 с динамическим эксцентриситетом ротора (20%);
На фиг. 6 приведен частотно-временной спектр внешнего магнитного поля математической модели асинхронного двигателя ДАМСО-15-12-8 с одним оборванным стержнем короткозамкнутой обмотки ротора;
Сущность способа заключается в следующем.
Хорошо известно, что при обрыве стержней обмотки ротора асинхронного электродвигателя в магнитном поле воздушного зазора появляются гармонические составляющие, которые отсутствуют для исправного асинхронного электродвигателя. В статье «Анализ спектра магнитного поля в зазоре асинхронного двигателя при повреждении обмотки ротора», автор - Скоробогатов А.А. (Вестник ИГЭУ. - вып. 2. - Иваново: ИГЭУ, 2006. С. 75-78) данные гармонические составляющие были названы гармониками от фиктивной обмотки ротора (далее - гармониками ФОР), их частоты могут быть определены по выражению:

 - нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц;
- нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц;
 - верхняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц.
- верхняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка, Гц.
Эти же гармонические составляющие появляются и в сигналах внешнего магнитного поля, в частности, в радиальной составляющей внешнего магнитного поля. Также с помощью современных технических средств возможно обнаружить эти гармонические составляющие и при пуске асинхронного двигателя. Одним из важных преимуществ использования для контроля наличия оборванных стержней обмотки ротора пусковых сигналов асинхронного двигателя является возможность выявления обрывов стержней пусковой обмотки двигателей с двойной беличьей клеткой, а также возможность контроля асинхронных двигателей, являющихся приводами механизмов, которые в установившемся режиме работы могут работать с переменной нагрузкой (например, двигатели дробилок).
В пусковом режиме при изменении скольжения от единицы до номинального значения (близкого к нулю) поведение гармонических составляющих существенно различается. Верхние боковые частоты гармоник ФОР изменяются от 50 Гц до значений, характерных для установившегося режима (фиг. 2), в то время как нижние боковые частоты ФОР сначала уменьшаются до 0 Гц, и лишь после этого достигают значений, характерных для установившегося режима (фиг. 1).
В приведенном ниже примере показано, что на амплитуды гармонических составляющих ФОР на верхних боковых частотах могут оказывать большое влияние иные эксплуатационные факторы, в частности, динамический эксцентриситет ротора асинхронного двигателя. В связи с этим появление в спектре частот  может характеризовать наличие эксцентриситета ротора, а не обрывов стержней (как можно увидеть из фиг. 5). В то же время частоты
может характеризовать наличие эксцентриситета ротора, а не обрывов стержней (как можно увидеть из фиг. 5). В то же время частоты  могут возникать лишь вследствие обрывов стержней, поэтому их появление в спектре и используется для обнаружения оборванных стержней.
могут возникать лишь вследствие обрывов стержней, поэтому их появление в спектре и используется для обнаружения оборванных стержней.
Поскольку анализируется режим с постоянно изменяющимися значениями амплитуд и частот гармонических составляющих, для построения частотно-временного спектра используется оконное преобразование Фурье, суть которого состоит в разделении пускового сигнала на интервалы равной длительности и проведения преобразования Фурье на каждом из них. Для уменьшения эффекта растекания спектра и достаточно точной оценки амплитуд гармонических составляющих применяется оконное преобразование с низким разрешением (например, окно Флэттоп или окно Блэкмана-Наталла). При этом весь сигнал (радиальная составляющая внешнего магнитного поля при пуске асинхронного двигателя) разделяется на интервалы, продолжительность которых определяется исходя из того, что частоты гармонических составляющих не должны сливаться друг с другом в спектре хотя бы с момента, при котором скольжение двигателя равно 0,5. Оценка длительности расчетных интервалов ΔT осуществляется исходя из числа пар полюсов асинхронного двигателя, а также ширины главного лепестка используемого окна. Формула ее расчета выглядит следующим образом:
 где
где
ΔF - относительная ширина главного лепестка используемого окна по сравнению с шириной главного лепестка прямоугольного окна (ΔF=5 для окна Флэттоп, ΔF - 4 для окна Блэкмана-Наталла и т.д.);
а=2 - коэффициент, учитывающий возможность перекрытия окон соседних гармоник;
 - разница между соседними частотами гармоник ФОР в момент времени, при котором s=0,5.
- разница между соседними частотами гармоник ФОР в момент времени, при котором s=0,5.
Таким образом, предлагаемый способ функционального контроля оборванных стержней асинхронного двигателя позволяет по наличию нижних боковых частот гармонических составляющих в частотно-временном спектре радиальной составляющей внешнего магнитного поля асинхронного двигателя в пусковом режиме сделать вывод о наличии или отсутствии оборванных стержней в обмотке ротора.
Способ реализуется следующим образом:
Посредством внешнего датчика магнитного поля (например, датчика Холла), устанавливаемого на корпус электродвигателя в зоне середины длины сердечника статора, осуществляют запись сигнала радиальной составляющей индукции внешнего магнитного поля при пуске асинхронного двигателя. С помощью АЦП получают цифровой сигнал.
Далее полученный сигнал разделяют на интервалы, продолжительность интервалов выбирают с учетом числа пар полюсов асинхронного двигателя, а также ширины главного лепестка используемого окна преобразования Фурье.
После этого формируют частотно-временной спектр зарегистрированного сигнала с помощью оконного преобразования Фурье (используя окна низкого разрешения). Определяют наличие в спектре гармонических составляющих ФОР на нижних боковых частотах. При наличии этих гармонических составляющих делают заключение об имеющемся обрыве стержня обмотки ротора асинхронного двигателя.
Способ выявления оборванных стержней в короткозамкнутой обмотке ротора асинхронного электродвигателя при пуске был реализован на базе персонального компьютера. Работоспособность метода проверена на математической модели, выполненной в программном комплексе ANSYS, асинхронного двигателя типа ДАМСО-15-12-8, паспортные данные которых приведены в табл. №1.
Пример. Испытание работы заявленного способа на математической модели асинхронного электродвигателя ДАМСО-15-12-8 (показанной на фиг. 3).
Были выполнены три модели этого асинхронного двигателя: в исправном состоянии, при наличии динамического эксцентриситета ротора без оборванных стержней и при наличии одного оборванного стержня ротора. Полученные спектры представлены на фиг. 4-6 соответственно. Из фиг. 6 хорошо видно, что при обрыве стержня в спектре отчетливо проявляются как нижние (обозначенные на фиг. 6 ФОР ν-), так и верхние боковые частоты гармоник ФОР (обозначенные ФОР ν+). Однако при наличии эксцентриситета ротора в спектре также проявились гармоники, частоты которых совпадают с частотами гармоник ФОР ν+, хотя и слабо, но проявляющиеся при пуске, однако хорошо проявляющиеся при приближении к установившемуся режиму (фиг. 5). При этом лишь на фиг. 6 отчетливо видны гармонические составляющие на нижних боковых частотах ФОР ν-, частоты которых достигают нулевого значения, то есть они «отражаются» от оси времени. Именно появление таких частот и позволяет судить о наличии обрыва стержня обмотки ротора.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТЫХ ОБМОТОК РОТОРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2017 |
|
RU2650821C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2786379C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2019 |
|
RU2724988C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТОЙ ОБМОТКИ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И ИХ КОЛИЧЕСТВА | 2017 |
|
RU2654972C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2791428C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОВЫШЕННОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2024 |
|
RU2823095C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2624986C1 |
| Способ диагностики повреждения короткозамкнутой обмотки ротора асинхронного двигателя | 2016 |
|
RU2644576C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПО ТОКУ СТАТОРА | 2014 |
|
RU2559162C1 |

Изобретение относится к области контроля технического состояния асинхронных электродвигателей и может быть использовано для обнаружения обрывов стержней обмоток роторов асинхронных электродвигателей. Сущность: способе включает цифровую регистрацию радиальной составляющей индукции внешнего магнитного поля во времени с помощью датчика магнитного поля, устанавливаемого на корпусе электродвигателя в зоне середины длины сердечника статора. Указанный сигнал регистрируют в режиме пуска, разделяют его на интервалы. На каждом из этих интервалов производят оконное преобразование Фурье. Продолжительность интервалов выбирают с учетом числа пар полюсов асинхронного двигателя, а также ширины главного лепестка используемого окна преобразования Фурье. Получают частотно-временной спектр. Определяют в этом спектре наличие гармонических составляющих фиктивной обмотки ротора на нижних боковых частотах, определяемых по выражению:

где 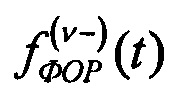 - нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка Гц,
- нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка Гц,
t - текущее время при пуске, 0≤t≤T, с,
Т - продолжительность пуска асинхронного двигателя, с;
ƒс - частота сети, Гц,
s(t) - скольжение ротора;
p - число пар полюсов двигателя;
ν - порядок гармоники. При наличии указанных гармонических составляющих формируют сигнал о наличии обрыва стержня обмотки ротора. Технический результат: повышение достоверности результатов контроля при расширении функциональных возможностей. 6 ил., 1 табл.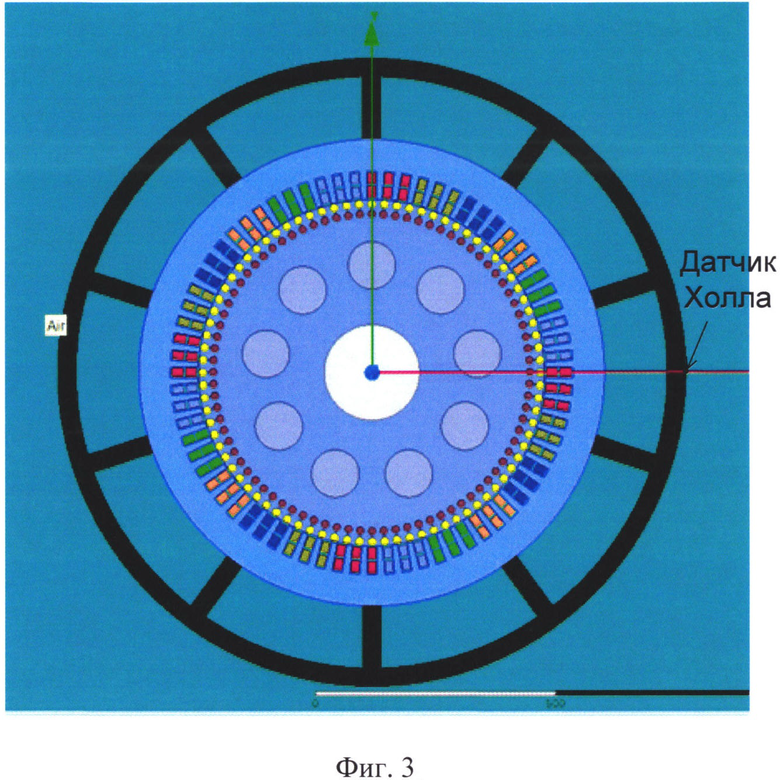
Способ выявления оборванных стержней в короткозамкнутой обмотке ротора асинхронного электродвигателя, включающий цифровую регистрацию радиальной составляющей индукции внешнего магнитного поля во времени с помощью датчика магнитного поля, устанавливаемого на корпусе электродвигателя в зоне середины длины сердечника статора, отличающийся тем, что указанный выше сигнал регистрируют в режиме пуска, разделяют его на интервалы, на каждом из этих интервалов производят оконное преобразование Фурье, при этом продолжительность интервалов выбирают с учетом числа пар полюсов асинхронного двигателя, а также ширины главного лепестка используемого окна преобразования Фурье, получают частотно-временной спектр, определяют в этом спектре наличие гармонических составляющих фиктивной обмотки ротора на нижних боковых частотах, определяемых по выражению:  где
где
 - нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка Гц,
- нижняя боковая частота гармоники фиктивной обмотки ротора ν-го порядка Гц,
t - текущее время при пуске, 0≤t≤Т, с;
Т - продолжительность пуска асинхронного двигателя, с;
ƒс - частота сети, Гц;
s(t) - скольжение ротора;
р - число пар полюсов двигателя;
ν - порядок гармоники,
при наличии указанных гармонических составляющих формируют сигнал о наличии обрыва стержня обмотки ротора.
| СПОСОБ ВЫЯВЛЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТОЙ ОБМОТКИ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И ИХ КОЛИЧЕСТВА | 2017 |
|
RU2654972C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТЫХ ОБМОТОК РОТОРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2017 |
|
RU2650821C1 |
| Прибор для измерения продолжительности эхо | 1930 |
|
SU21246A1 |
| Способ контроля обрыва стержня ротора короткозамкнутого асинхронного электродвигателя | 1983 |
|
SU1121633A1 |
| US 6308140 B1, 23.10.2001 | |||
| CN 102279341 B, 30.10.2013 | |||
| CN 102279364 B, 17.07.2013 | |||
| JP 61112976 A, 30.05.1986 | |||
| WO 2006048470 A1, 11.05.2006. | |||

