Изобретение относится к измерительной технике, в частности к устройствам, используемым при создании датчиков линейных и угловых движений.
Оно представляет собой электрохимическую магнитогидродинамическую ячейку. Указанная ячейка используется для формирования обратной связи в датчиках линейных и угловых движений. Предлагаемое отличие от аналогов позволяет увеличить диапазон входных сигналов, в котором функционирует обратная связь и, в конечном итоге, расширить динамический диапазон функционирования датчика угловых движений.
Изобретение может найти применение в навигационных устройствах, в частности для навигации и управления спутников.
Молекулярно-электронные ячейки, являющиеся преобразователями линейных и угловых акселерометров, используют раствор электролита в качестве инерционной массы и преобразуют поток электролита в электрический сигнал. Молекулярно-электронные преобразователи включают четыре электрода, помещенные в замкнутый контур, заполненный электролитом, при этом внутренние электроды служат катодами, а периферийные - анодами.
При подключении электродов молекулярно-электронного преобразователя к внешней электронике, аноды находятся при потенциале на 250-300 мВ более высоком, чем катоды. В этом случае концентрация активного компонента (ионов три-йодида) в покоящейся жидкости на анодах равна объемному значению, а на катодах - близка к нулю.
Катодные токи в этом случае определяются скоростью подвода реагирующего активного компонента к электродам. В неподвижной жидкости перенос активных носителей осуществляется согласно диффузионному механизму, и катодный ток определяется выражением:
Здесь D - коэффициент диффузии, S - площадь соответствующего катода,  - градиент концентрации активного компонента на поверхности соответствующего катода. При движении жидкости дополнительно к диффузионному механизму действует конвективный перенос, приводящий к увеличению тока на одном катоде и уменьшению - на другом. При включении двух пар электродов по дифференциальной схеме фоновые катодные токи взаимно компенсируются, а сигнальный ток, вызванный возникающим под действием внешнего ускорения движением жидкости, удваивается.
- градиент концентрации активного компонента на поверхности соответствующего катода. При движении жидкости дополнительно к диффузионному механизму действует конвективный перенос, приводящий к увеличению тока на одном катоде и уменьшению - на другом. При включении двух пар электродов по дифференциальной схеме фоновые катодные токи взаимно компенсируются, а сигнальный ток, вызванный возникающим под действием внешнего ускорения движением жидкости, удваивается.
Помимо соответствующих коэффициентов преобразования линейного или углового ускорения в электрический ток и их частотной зависимости, величины собственного шума, также ключевыми параметрами линейных и угловых акселерометров являются динамический диапазон, линейность отклика, температурная зависимость.
Использование обратной связи в молекулярно-электронных преобразователях позволяет оптимизировать параметры с точки зрения достижения максимальной чувствительности и минимального уровня собственных шумов, при этом совершенно не обязательно иметь плоскую амплитудно-частотную характеристику до включения датчика в контур обратной связи.
Математическая модель частотной характеристики прибора может быть описана следующим выражением:
 ,
,
где Ws - передаточная функция чувствительного элемента, Wff, Wfb - передаточная функция прямой и обратной цепей электроники соответственно, Wf - передаточная функция фильтра.
Известны несколько способов формирования обратной связи в молекулярно-электронных преобразователях движения.
Один из способов формирования обратной связи описан в (Вяселев М.Р.; Ермолин В.И.; Мифтахов А.Г.; Урманчеев Л.М.; Нургалиев М.И. RU 2152044 С17 G01P 15/08, G01P 3/42). Здесь обратная связь формируется магнитогидродинамическим преобразователем, состоящим из двух электродов, входной ток на которые поступает через преобразователь напряжение-ток.
Известны также электромеханические способы формирования отрицательной обратной связи в электрохимических преобразователях (В.М. Агафонов, И.В. Егоров, А.С. Шабалина. Принципы работы и технические характеристики малогабаритного молекулярно-электронного сейсмодатчика с отрицательной обратной связью//Сейсмические приборы. 2013. Т. 49, №1, с. 5-18) с помощью магнита и катушки. Здесь сигнал на выходе чувствительного элемента преобразуется в электронике прямой и обратной цепей и подается в виде электрического тока в катушку обратной связи. В свою очередь, электрический ток в катушке, взаимодействуя с магнитом, помещенным в катушке и закрепленным на мембране, закрывающей канал преобразователя, создает противосилу, компенсирующую силы инерции, развиваемые под действием внешнего механического сигнала.
МГД ячейки также используются для детектирования движения электропроводящей жидкости в диэлектрическом канале, как, например, (Sedley J. Greer, Jr., US 5003517A), включающие в себя как МГД ячейку, так и пьезоэлектрические датчики.
Одним из главных отличий предлагаемой магнитогидродинамической ячейки является отсутствие гальванической развязки, которая, например, реализована в (Вяселев М.Р.; Ермолин В.И.; Мифтахов А.Г.; Урманчеев Л.М.; Нургалиев М.И. RU 2152044 С17 G01P 15/08, G01P 3/42) в виде наличия в схеме оптрона.
Недостатком же в случае электромеханического способа формирования обратной связи является невозможность детектирования постояннодействующего ускорения и создания постоянной противосилы в схеме обратной связи.
В качестве прототипа выбран конвективный акселерометр с «положительной» или «отрицательной» инерциальной массой (Vladimir A. Kozlov, Vadim М. Agafonov; US 7578188 В2), который состоит из замкнутого канала, заполненного электролитом, и помещенного в него преобразующую электродную ячейку. Отличием от предлагаемого изобретения является отсутствие магнитогидродинамической ячейки для формирования сигнала обратной связи и калибровки электрохимических датчиков угловых и линейных движений.
Принцип работы электрохимических преобразователей состоит в том, что под действием разности потенциалов в преобразующем 4-хэлектродном узле (преобразующая ячейка), помещенном в канал с электролитом (водный раствор высококонцентрированного электролита KI с добавлением I2), на катодах (внутренние электроды в ячейке) идет процесс восстановления йода  , а на анодах (внешние электроды) процесс окисления йода
, а на анодах (внешние электроды) процесс окисления йода  . Таким образом, устанавливается разность концентраций активного компонента внутри узла и вне его. Токи, протекающие через электроды, пропорциональны градиенту концентрации активных ионов вблизи поверхности электродов. При движении преобразователя, жидкость в канале начинает перемещаться относительно электродов, тем самым начинают варьироваться и концентрации активных ионов вблизи электродов, а следовательно, и токи. Выходным сигналом приборов на основе молекулярно-электронного переноса является разностный катодный ток. Это позволяет убрать постоянное смещение и обеспечить линейность отклика в широком диапазоне сигналов.
. Таким образом, устанавливается разность концентраций активного компонента внутри узла и вне его. Токи, протекающие через электроды, пропорциональны градиенту концентрации активных ионов вблизи поверхности электродов. При движении преобразователя, жидкость в канале начинает перемещаться относительно электродов, тем самым начинают варьироваться и концентрации активных ионов вблизи электродов, а следовательно, и токи. Выходным сигналом приборов на основе молекулярно-электронного переноса является разностный катодный ток. Это позволяет убрать постоянное смещение и обеспечить линейность отклика в широком диапазоне сигналов.
Как говорилось выше, в предположении большой глубины обратной связи (Ws⋅Wff⋅Wfb>>1) выражение для частотной характеристики прибора принимает вид:
Данная модель дает выражение для передаточной функции независящей от передаточной функции сенсора и электроники прямой цепи. В зависимости от способа формирования сигнала обратной связи (вида передаточной функции Wfb) можно получить выход, пропорциональный скорости, либо ускорению.
Предлагаемое изобретение позволяет формировать отрицательную обратною связь в линейных и вращательных электрохимических акселерометрах в частотном диапазоне от 0 Гц, используя магнитогидродинамический эффект. Осуществление производится следующим образом: плоские МГД электроды, образующие МГД ячейку, помещаются на противоположные стенки рабочего канала. Постоянное магнитное поле формируется постоянными магнитами и направлено перпендикулярно рабочему каналу и вектору тока между МГД электродами.
Таким образом, при протекании переменного тока между МГД электродами и воздействии постоянного магнитного поля, перпендикулярного вектору электрического поля и направления канала, жидкость будет двигаться вдоль канала.
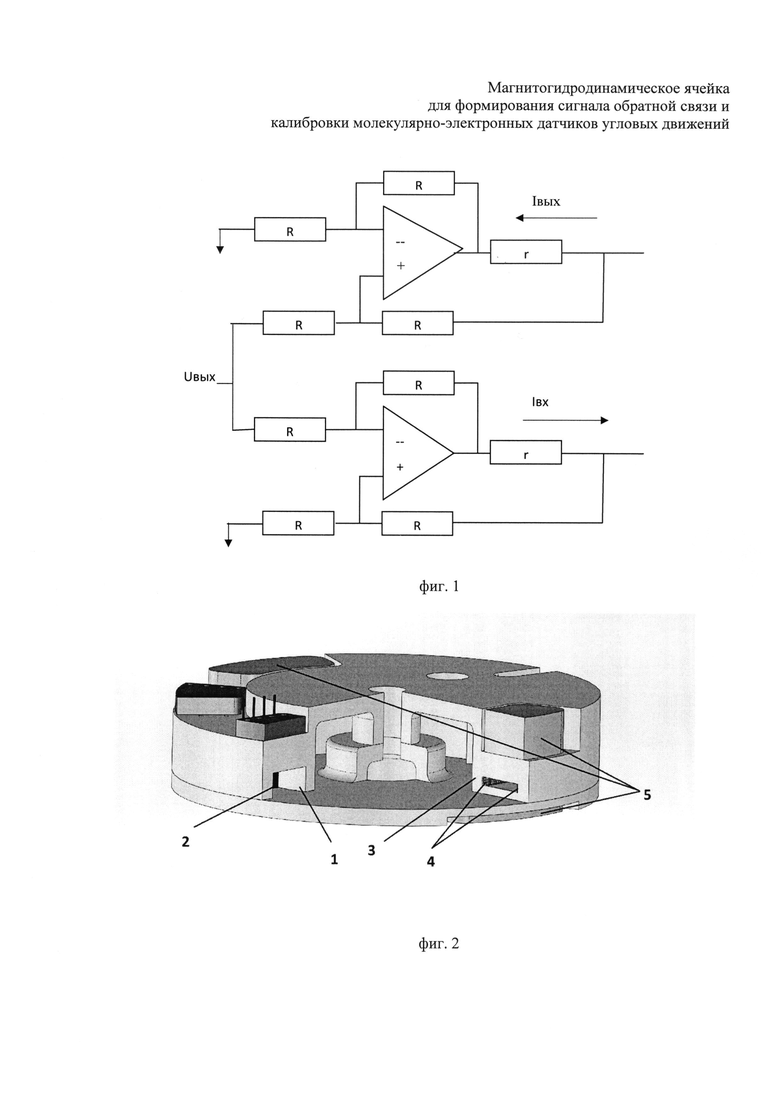
Формирование же обратной связи заключается в следующем: выходной сигнал Uвых с преобразующей ячейки подается на источники токов, которые составлены таким образом, чтобы один из них заводил ток в МГД ячейку через один из электродов, а второй - выводил такой же по значению ток из МГД ячейки через второй электрод. На фиг. 1 представлена электрическая схема источников токов управляемых напряжением Uвых с преобразующей ячейки. При R>>r, формируемый ток равен Iвх(вых)=Uвх/r. Такая схема формирования тока позволяет компенсировать утечки тока из МГД ячейки в преобразующую и не требует гальванической развязки. Суть же обратной связи заключается в том, что поток, формирующийся в МГД ячейке, компенсирует поток электролита через преобразующую ячейку, возникающий при воздействии механического сигнала.
На фиг. 2 представлен общий вид электрохимического акселерометра, состоящего из замкнутого рабочего канала 1, помещенной в него преобразующей электродной ячейки 2, сужения 3 рабочего канала 1 в месте расположения плоских МГД электродов 4, расположенных друг напротив друга и постоянных магнитов 5.
Важной принципиальной особенностью предлагаемого изобретения является локальное сужение рабочего канала в направлении действия магнитного поля в месте расположения МГД электродов, что дает увеличение скорости протекания рабочей жидкости в МГД ячейке относительно ее скорости вне МГД ячейки, согласно законам гидродинамики, а также увеличения силы магнитного поля. Поскольку сила, действующая на движущийся заряд магнитном поле, прямо пропорциональна скорости движения заряда и величине магнитного поля, то выше указанная особенность конфигурации МГД ячейки, позволяет увеличить глубину обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Молекулярно-электронный гидрофон с обратной связью на основе магнитогидродинамического эффекта | 2018 |
|
RU2698527C1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ДАТЧИК УГЛОВЫХ ДВИЖЕНИЙ | 2011 |
|
RU2454674C1 |
| Способ обеспечения температурной стабильности параметров молекулярно-электронного преобразователя в области высоких частот | 2019 |
|
RU2724303C1 |
| НЕМАГНИТНОЕ ИЗМЕРЕНИЕ АЗИМУТА С ИСПОЛЬЗОВАНИЕМ МЕТ ЭЛЕКТРОХИМИЧЕСКИХ ДАТЧИКОВ | 2010 |
|
RU2539123C2 |
| Низкочастотный векторный акустический приемник | 2016 |
|
RU2650839C1 |
| Схема подключения молекулярно-электронного преобразователя к электронной плате | 2016 |
|
RU2627139C1 |
| Способ изготовления преобразующего элемента молекулярно-электронного датчика движения | 2017 |
|
RU2659578C1 |
| ИЗМЕРИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА ПАРАМЕТРОВ ДВИЖЕНИЯ ДЛЯ ПРОВЕДЕНИЯ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТИ | 2011 |
|
RU2444738C1 |
| Способ увеличения коэффициента преобразования молекулярно-электронного датчика движения | 2017 |
|
RU2659459C1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ДВИЖЕНИЙ | 2005 |
|
RU2324946C2 |
Изобретение относится к измерительной технике, в частности к устройствам, используемым при создании датчиков линейных и угловых движений. Магнитогидродинамическая ячейка для формирования сигнала обратной связи и калибровки молекулярно-электронных датчиков угловых и линейных движений состоит из двух плоских электродов, размещенных друг напротив друга на стенках рабочего канала датчика, помещенная в магнитное поле, перпендикулярное оси канала и линии, соединяющей указанные электроды, в месте расположения которых выполнено локальное сужение рабочего канала в направлении действия магнитного поля, при этом подаваемые на электроды токи формируются двумя источниками токов, управляемых напряжением, причем упомянутые токи равны по величине, но направлены в противоположные стороны относительно источников тока. Технический результат – расширение динамического диапазона функционирования датчика угловых движений. 2 ил.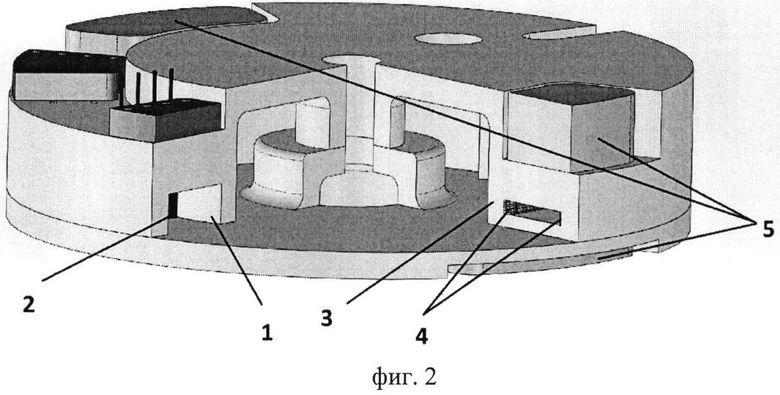
Магнитогидродинамическая ячейка для формирования сигнала обратной связи и калибровки молекулярно-электронных датчиков угловых и линейных движений, состоящая из двух плоских электродов, размещенных друг напротив друга на стенках рабочего канала датчика, помещенная в магнитное поле, перпендикулярное оси канала и линии, соединяющей указанные электроды, в месте расположения которых выполнено локальное сужение рабочего канала в направлении действия магнитного поля, отличающаяся тем, что подаваемые на электроды токи формируются двумя источниками токов, управляемых напряжением, причем упомянутые токи равны по величине, но направлены в противоположные стороны относительно источников тока.
| US 4764908 A1, 16.08.1988 | |||
| US 7578188 B2, 25.08.2009 | |||
| Несущие поверхности для летательных аппаратов | 1926 |
|
SU11204A1 |
| Устройство для измерения ускорения | 1975 |
|
SU678425A1 |

