Область техники
Настоящее изобретение имеет отношение к области инерциальных датчиков (линейных и угловых акселерометров, гироскопов, инклинометров и сейсмоприемников), называемых молекулярными электронными преобразователями (MET).
Предпосылки к созданию изобретения
Наиболее трудным требованием для локализации дальней цели (FTL) является определение азимутального курса и наклона, причем наиболее трудным является определение азимута. В настоящее время в портативных FTL системах используют цифровой магнитный компас (DMC). Однако на точность измерения азимута при помощи DMC влияют погрешности за счет магнитных влияний расположенных поблизости объектов (таких, как военные транспортные средства), за счет изменений магнитного поля Земли и за счет плохой калибровки. Поэтому желательно использовать немагнитные средства измерения азимута, которые также являются компактными, имеют низкое энергопотребление и являются экономичными.
Азимутальный курс может быть получен за счет измерения вращения Земли с использованием инерциальных систем обнаружения Севера. Гироскопы имеют достаточно хорошие характеристики для обеспечения требуемой точности измерения FTL, однако они являются слишком громоздкими и дорогими для портативных применений. Гироскопы на базе MEMS являются небольшими и дешевыми, однако в настоящее время они могут обеспечивать точность измерения курса в диапазоне нескольких градусов, что далеко от желательной точности ±1 мил. Инерциальные средства измерения на базе оптики, такие как волоконно-оптические гироскопы (FOGs) и кольцевые лазерные гироскопы (RLGs), имеют требуемый уровень точности для измерения азимутального курса, но являются слишком громоздкими и дорогими.
Раскрытие изобретения
Настоящее изобретение имеет отношение к категории инерциальных датчиков (линейных и угловых акселерометров, гироскопов, инклинометров и сейсмоприемников), называемых молекулярными электронными преобразователями (MET). В отличие от других инерциальных датчиков в MET датчиках используют жидкий электролит в качестве их инерциальной массы. Датчики не содержат никаких прецизионных механических деталей или пружин и являются относительно простыми и дешевыми в изготовлении. MET датчики представляют собой специфический вид электролитической ячейки, выполненной так, что движение MET, которое вызывает движение (конвекцию) в жидком электролите, может быть преобразовано в электрический сигнал, пропорциональный ускорению или скорости. MET датчики имеют низкий собственный шум и высокое усиление сигнала (около 106), что позволяет им конкурировать с волоконно-оптическими гироскопами (FOGS) и с кольцевыми лазерными гироскопами (RLGS) при намного меньших конструктивных параметрах. MET датчики также по сути являются нечувствительными к воздействию магнитных полей или радиации.
В соответствии с одним вариантом осуществления настоящего изобретения предлагается гироскоп. Гироскоп содержит два пересекающихся флюидных канала, причем два флюидных канала содержат первый канал и второй канал. Первый флюидный канал образует первый замкнутый контур, а второй канал образует второй замкнутый контур. Первый канал сконфигурирован для создания циркуляции жидкого электролита через первый замкнутый контур. Второй канал содержит молекулярный электронный преобразователь, который сконфигурирован для измерения электрического тока во втором замкнутом контуре. В соответствии с предпочтительными вариантами осуществления циркуляция жидкого электролита в первом флюидном канале поддерживается за счет магнетогидродинамических сил. В некоторых конструктивных вариантах магнетогидродинамические силы созданы при помощи магнетогидродинамической ячейки, которая содержит постоянные магниты. Гироскоп может иметь множество электродов, расположенных в магнитном поле, созданном при помощи постоянных магнитов.
Краткое описание чертежей
На фиг.1А схематично показан MET угловой акселерометр, в котором использован тороид 1, заполненный электролитом, MET преобразователь 2 и расширенный объем 3 для компенсации расширения электролита при повышении температуры.
На фиг.1В показана фотография датчика.
На фиг.1C схематично показан MET преобразователь, который содержит герметизированный корпус 1, электроды 2, раствор 3 электролита, диэлектрические распорки 4, аноды 5 и катоды 6.
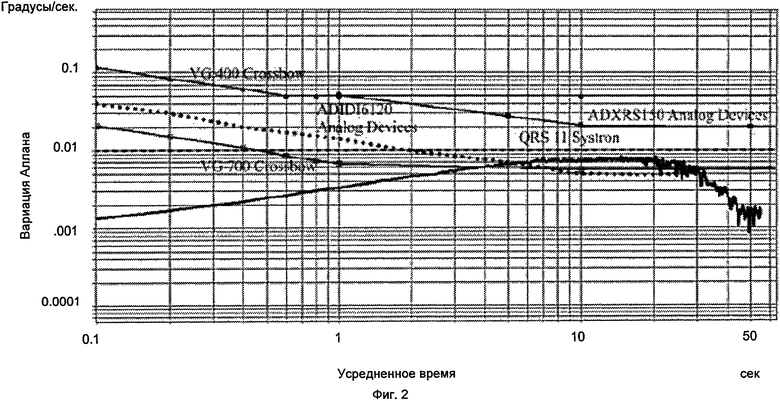
На фиг.2 приведен график сравнительных данных вариации Аллана. Самая нижняя на графике сплошная линия представляет собой кривую вариации Аллана для датчика угловой скорости типа MET MTRS3200.
На фиг.3 показана конфигурация эксперимента для поиска Севера. Ось чувствительности датчика показана стрелкой, ωст - скорость вращения платформы, ω3 - проекция скорости вращения Земли на горизонтальную плоскость, β=ωстt - угол между осью чувствительности датчика и проекцией скорости вращения Земли на горизонтальную плоскость.
На фиг.4 показан сигнал от MET углового датчика (ось y, вольты) во время вращения платформы в функции времени (ось x, секунды).
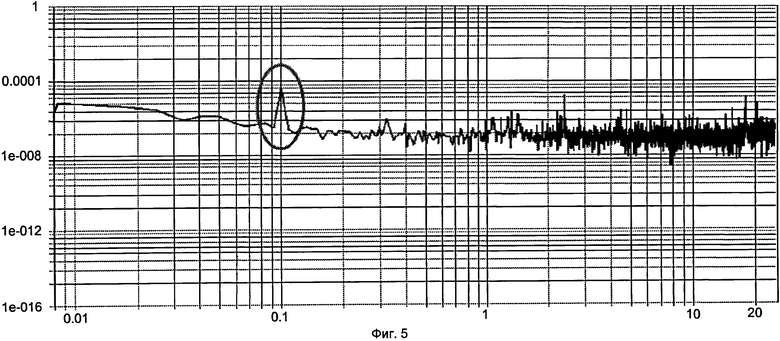
На фиг.5 показан спектр сигнала углового датчика при вращении платформы (ось x - частота, Гц, ось y - скорость, рад/сек). Максимальная скорость при вращении платформы (пик в кружке) отображает скорость вращения Земли.
На фиг.6 показана схема MET гироскопа.
На фиг.7 показана схема MET гироскопа (слева) и лабораторный образец MET гироскопа (справа).
Подробное описание изобретения
В соответствии с настоящим изобретением предлагается семейство инерциальных датчиков, которые основаны на другом чувствительном механизме, чем стандартные электромеханические или оптические инерциальные датчики. Предлагаемые инерциальные датчики работают скорее на базе электрохимического механизма. В MET датчиках использованы физические и химические явления, которые происходят у поверхности электродов в электрохимических ячейках в результате гидродинамического движения. Преимуществом MET датчиков является масштабируемость. Например, в некоторых конструктивных вариантах, описанные здесь, угловые датчики имеют диаметр всего 7 мм. Однако, если в данном применении требуется, например, более низкий уровень шума и более высокая чувствительность, то размер датчика может быть увеличен, чтобы получить требуемые характеристики.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения MET датчик содержит проводящие элементы, неограничительным примером которых являются пары металлических пластин, при необходимости разделенные диэлектрическими прокладками. Когда используют диэлектрические прокладки, тогда проводящие элементы и прокладки размещают в виде чередующихся слоев и выравнивают так, чтобы совпадали отверстия в проводящих элементах и в прокладках для протекания жидкого реагента (например, содержащего электролит) в результате приложения внешнего ускорения. Например, проводящими элементами могут быть металлические пластинки, имеющие внешние контакты, соединенные с измерительной электроникой, разделенные диэлектрическими прокладками. В некоторых конструктивных вариантах все отверстия имеют одинаковые размеры и форму и образуют регулярную решетку. Диэлектрические прокладки введены между проводящими элементами для исключения возможного короткого замыкания между ними. Однако в некоторых конструктивных вариантах диэлектрические прокладки используют также для создания ламинарного течения жидкого агента через чувствительный элемент. Толщина прокладки также влияет на диапазон частот измерения, как это показано в патенте США No. 7,516,660, который включен в данное описание в качестве ссылки. Диаметр d и число отверстий в прокладке в свою очередь определяют чувствительность и оказывают влияние на частотную зависимость передаточной функции в полном частотном рабочем диапазоне. При увеличении числа отверстий и увеличении их диаметра d гидродинамический импеданс прокладки снижается обратно пропорционально числу отверстий и четвертой степени их диаметра. Таким образом, за счет изменения числа и диаметра отверстий можно изменять передаточную функцию. Более конкретно, высшая граничная частота передаточной функции пропорциональна гидродинамическому импедансу, так что диапазон частот увеличивается при увеличении гидродинамического импеданса. Принимая это во внимание, используют четыре или больше отверстий в квадратных диэлектрических прокладках с размерами 1.5×1.5 мм. Более того, выбирают диаметр отверстий в диапазоне ориентировочно от 1 до 300 мкм, а преимущественно ориентировочно от 20 до 200 мкм.
Чувствительность MET ячейки также зависит от физических и химических свойств жидкого агента, содержащегося в корпусе ячейки. В предпочтительных конструктивных вариантах желательно, чтобы жидкий агент имел минимальную вязкость при максимальной растворимости. Более того, жидкий агент может содержать соль (например, соль щелочного металла или щелочноземельного металла) и растворенное вещество, которое может действовать как льюисовская кислота или льюисовское основание, такое как растворенный металлический йод. Подходящими для этого растворителями являются, например, дистиллированная вода и органические растворители, способные растворять органические или неорганические соли, а преимущественно соли металлов, такие как соли щелочных металлов. При растворении солей щелочных металлов плотность раствора повышается, что приводит к повышению чувствительности MET ячейки. Таким образом, в некоторых конструктивных вариантах желательно иметь высокую концентрацию растворенных солей, преимущественно близкую к пределу растворимости. Вообще говоря, полезный диапазон концентрации составляет ориентировочно от 0.5 до 4.0 моль на литр, а преимущественно ориентировочно от 2 до 4 моль на литр. Кроме того, чистота соли и растворенного вещества, которое действует как льюисовское основание (например, йод), должна составлять по меньшей мере 98.5%, а преимущественно по меньшей мере 99.98%. Выходной электрический ток MET ячейки определяется концентрацией растворенного металлического йода, ионы которого являются носителями заряда, которые способны получать электрон от проводящих элементов 5 и возвращать им электрон. Таким образом, полезно иметь насыщенный раствор указанных солей и минимальную концентрацию 0.0002 N растворенного металлического йода. Такая концентрация растворенных солей обеспечивает работу инструмента в широком диапазоне отрицательных температур, например до -70°С. Концентрация металлического йода может быть ниже, однако в этом случае выходной ток MET ячейки может быть недостаточен для нормальной работы электрических схем, в том числе электрических схем, которые используют для коррекции температуры и частоты. Полезный диапазон концентраций для растворенного металлического йода составляет ориентировочно от 0.0002 до 0.4 моля на литр, а преимущественно ориентировочно от 2 до 4 молей на литр. Растворенные соли могут содержать металлы группы II периодической таблицы элементов, которые имеют растворимость в жидкости, которая не ниже чем растворимость солей щелочных металлов. Наиболее подходящими для данного применения являются, например, соли бария, которые при максимальной растворимости имеют плотности раствора, которые превышают соответствующую плотность раствора солей щелочных металлов в 1.5 раза для данной молярной концентрации растворенного вещества.
MET угловые датчики
Фирма MET Tech разработала угловой акселерометр и датчик скорости, в которых MET ячейка введена в тороидальный канал. Схема и фотография углового акселерометра показаны на фиг.1. В дополнение к компактности, высоким характеристикам и низкой стоимости MET угловой акселерометр, как и другие MET датчики, обладает высокой прочностью и стойкостью к ударным нагрузкам. Ударопрочность MET угловых акселерометров проверяли в Picatinny Arsenal до 20 kGs в базовом тесте на живучесть. Сравнение характеристик MET углового акселерометра с другими продвинутыми технологиями показано в Таблице 1.
MET датчик скорости, внешний вид которого идентичен акселерометру, сконфигурирован для измерения угловой скорости в диапазоне частот 0.02-300 Гц. Вариация Аллана для датчика скорости, которая показана на фиг.2 вместе с приведенными для сравнения данными некоторых серийных гироскопов, демонстрирует превосходство MET технологии над продвинутыми серийными датчиками.
Имеющиеся в настоящее время MET угловые датчики не позволяют измерять скорость до DC (до постоянного тока) и таким образом не позволяют непосредственно измерять скорость вращения Земли. Однако проведенный эксперимент показал, что MET датчик скорости позволяет измерять (находить) истинный Север с использованием модуляции (аналогично гирокомпасу), как это описано далее более подробно.
В соответствии с настоящим изобретением предлагаются MET датчики, которые позволяют немагнитно с высокой точностью обнаруживать азимут. MET датчики угловой скорости (диаметром 50 мм) были установлены на вращающейся платформе так, что их ось чувствительности была расположена перпендикулярно оси платформы. Ось вращения Земли имеет проекцию на плоскость тороидального канала углового датчика. В процессе вращения платформы эта проекция вектора вращения Земли изменяется синусоидально в соответствии с частотой вращения платформы. Амплитуда измеренного сигнала дает одну горизонтальную проекцию скорости вращения Земли при местной широте. Фаза сигнала несет информацию относительно направления истинного Севера. Идеально в случае датчика угловой скорости максимум наблюдаемого выходного сигнала соответствует направлению на Север. На практике, имеется некоторая фазовая погрешность выходного сигнала датчика, которая может быть скомпенсирована с использованием заданной фазовой характеристики датчика. Другим путем коррекции фазовых погрешностей является проведение двух последовательных тестов: сначала с вращением датчика по часовой стрелке, а затем против часовой стрелки. Истинный Север будет точно посредине между максимальными пиками выходного сигнала при вращениях по часовой стрелке и против часовой стрелки.
Имитатор движения вдоль одной оси, установленный в термостабилизированной камере, был использован для создания и контроля движения вращения. Экспериментальная конфигурация показана на фиг.3.
Различные эксперименты были проведены при различных скоростях платформы с использованием нескольких разных датчиков. На фиг.4 показан сигнал от датчика в функции времени во время вращения платформы. На фиг.5 показан график спектра сигнала в полярной форме (фаза, амплитуда). Сигнал имеет период, соответствующий частоте вращения платформы, причем горизонтальная проекция скорости вращения Земли при местной широте может быть вычислена из амплитуды сигнала с использованием калиброванного коэффициента чувствительности датчика. Для нахождения направления на Север определяют фазовый сдвиг между максимумом выходного сигнала и нулевым показанием углового положения вращения платформы в направлениях по часовой стрелке и против часовой стрелки. Истинное направление на Север относительно нуля углового датчика может быть найдено как половина разности между фазовыми сдвигами в этих двух экспериментах.
Анализ измеренных значений угла между осью чувствительности датчика и направлением на географический Север показал, что они имеют девиацию не больше чем 0.10 градуса (1.8 мил) от фактического значения при всех частотах вращения с наилучшим совпадением (0.02 градуса, или ~0.4 мил) при самой низкой частоте. Эти результаты были подтверждены независимыми измерениями, проведенными третьей стороной. Эти данные показывают, что MET датчик угловой скорости может быть использован для измерения истинного Севера с очень высокой точностью, если использовать модуляцию. Таким образом, устройство для измерения азимута может быть сконструировано с использованием датчика скорости, установленного на вращающейся платформе, что позволяет создать точный датчик азимута. Однако фирма MET Tech разработала истинный гироскоп на базе MET преобразователя, который имеет еще более высокие характеристики при меньших размерах, как это описано далее более подробно.
MET гироскоп
В соответствии с настоящим изобретением также предлагается MET гироскоп. В соответствии с одним аспектом настоящего изобретения признают, что для создания MET гироскопа необходима конструкция MET устройства с вращающейся инерциальной массой. Одна примерная конструкция MET гироскопа в соответствии с настоящим изобретением показана схематично на фиг.6. Инструмент содержит два флюидных канала, которые пересекаются под прямым углом. Роторный канал (1) создает вращение электролита, который содержится в магнетогидродинамических (MHD) ячейках (2). Канал 2 содержит молекулярный электронный преобразователь (3) и служит как канал измерения. На фиг.6 видна одна часть канала измерения, а другая его часть расположена позади роторного канала. В предпочтительных вариантах осуществления каждая MHD ячейка содержит два электрода (4), которые расположены в магнитном поле, возбуждаемом при помощи постоянных магнитов (5).
Устройство, показанное на фиг.6, работает следующим образом. Когда корпус вращается вокруг оси перпендикулярно к роторному каналу с угловой скоростью О, падение давления (ДР) возникает вокруг преобразователей в измерительном канале за счет силы Кориолиса, воздействующей на жидкость в роторном канале:
ΔР=4ρVΩL,
где ρ представляет собой плотность электролита, V представляет собой скорость жидкости в роторном канале, a L представляет собой ширину роторного канала по оси X. Это выражение показывает, что этот инструмент работает как типичный гироскоп и вырабатывает выходной сигнал, пропорциональный угловой скорости, до постоянного тока. Расчеты характеристик MET гироскопа, выполненного на базе этой конструкции, показали, что стабильность смещения может быть непосредственно связана со скоростью жидкости в роторном канале, причем при скорости жидкости в диапазоне 1-26 см/сек (в зависимости от размеров устройства) получают погрешность гироскопа Δφгироскоп, составляющую всего 1.2×10-5 радиан (6.8×10-4 градусов).
В предпочтительных конструктивных вариантах поток жидкости в роторном канале является постоянным или почти постоянным. Чтобы исключить флуктуации этого потока, полезно иметь средства измерения расхода и механизм обратной связи для регулировки скорости нагнетания. Это может быть осуществлено при помощи различных средств, одним из которых может быть установка дополнительного MET преобразователя в роторном канале для этой цели.
В предпочтительных конструктивных вариантах гироскоп в соответствии с настоящим изобретением также имеет объединенные с ним электронику управления для регулировки нагнетания жидкости в роторный канал, для подачи питания на преобразователи, для корректировки сигнала с учетом колебаний температуры и для осуществления других стандартных функций обработки сигнала, чтобы получать линейный сигнал.
Собственные шумы MET датчиков в MET гироскопе
Анализ характеристик гироскопа показал, что имеются следующие основные источники шума (и, таким образом, источники погрешностей).
Тепловые гидродинамические собственные шумы. В существующих MET ячейках тепловые гидродинамические собственные шумы являются доминирующими при низких частотах и являются источником долговременных стохастических ошибок, которые в случае гироскопа называют нестабильностью смещения. Тепловые гидродинамические собственные шумы являются результатом флуктуации разности давлений на обеих сторонах MET преобразователя.
Наиболее важным выводом из анализа тепловых гидродинамических собственных шумов является то, что чем выше будет скорость вращения жидкого ротора, тем ниже будет погрешность гироскопа. Если произвести количественную оценку, то при данной скорости вращения жидкого ротора 20 см/сек получают погрешность гироскопа Δφгироскоп=0,0023 градуса, что достаточно для навигационного гироскопа.
Собственные шумы. вызванные конвекцией. Вызванные конвекцией собственные шумы являются результатом естественной конвекции жидкости. Даже если жидкость в целом является стабильной, небольшие местные отклонения плотности жидкости создают вертикальные потоки. Эти потоки создают дополнительную погрешность выходного сигнала MET ячейки. Вызванные конвекцией собственные шумы становятся более значимым фактором при повышении концентрации (и, таким образом, плотности) электролита. Это означает, что не следует без необходимости повышать концентрацию электролита (например, в попытке повышения скорости в MHD ячейке). Однако расчеты показывают, что вызванные конвекцией собственные шумы не создают значительных проблем при полезном диапазоне концентраций электролита.
Шумы, связанные с турбулентной пульсацией. Как уже было указано здесь выше, чувствительность молекулярно-электронного гироскопа прямо зависит от скорости электролита в роторном канале.
Однако при повышении скорости электролита в роторном канале может возникать турбулентность. Это потенциально может способствовать появлению дополнительных шумов в измерительном канале и приводить к увеличению собственных шумов инструмента, если не принять соответствующие меры для создания нетурбулентного течения. Таким образом, повышение скорости течения в роторном канале приводит к снижению тепловых гидродинамических шумов, но одновременно потенциально увеличивает шумы, связанные с турбулентной пульсацией. Из этого следует, что оптимальным течением, с точки зрения отношения, сигнал-шум является течение с самой высокой скоростью, которое может быть достигнуто до перехода в режим турбулентного течения. Моделирующие расчеты показали, что для некоторых конструктивных вариантов режим течения в роторном канале будет ламинарным при скоростях течения 20 см/сек и выше, так что связанные с турбулентной пульсацией шумы не будут оказывать вредного влияния на характеристики гироскопа.
Дробовой шум представляет собой тип электронного шума, который возникает тогда, когда конечное число частиц, которые переносят энергию, таких как электроны в электронной цепи или фотоны в оптическом устройстве, является достаточно малым для того, чтобы возникали обнаруживаемые статистические флуктуации в измерении. Дробовой шум является существенным фактором для MET гироскопа только в том случае, когда коэффициент преобразования преобразователя является очень низким, что может быть, если площадь преобразователя является малой и/или концентрация активных разновидностей (трехйодистых соединений) в электролите является малой. Так что дробовой шум не вносит существенный вклад в шумы MET гироскопа.
Электронные собственные шумы. Электроника для формирования сигнала для MET ячеек содержит преобразователь тока в напряжение и фильтры. Фильтры имеют единичное усиление в полосе пропускания инструмента и практически не создают электронные собственные шумы.
Для снижения электронных собственных шумов преобразователь должен иметь высокий импеданс и высокий коэффициент преобразования. Кроме того, следует использовать операционные усилители с низким уровнем шума. Во всех MET ячейках электронные собственные шумы начинают оказывать влияние при относительно высоких частотах (обычно свыше 40-50 Гц), если вообще оказывают влияние, так что можно ожидать, что в случае гироскопа они являются только второстепенным источником полных собственных шумов.
Пример 1: Измерительный эксперимент по поиску Севера с использованием MET датчика угловой скорости
В этом примере приведены результаты экспериментов, проведенных с использованием существующего MET датчика угловой скорости, установленного на вращающейся платформе, который позволяет обнаруживать вращение Земли при помощи модуляции аналогично гирокомпасу. Проведенные эксперименты показали возможность обнаружения истинного Севера с отклонением не более 0.1 градуса (1.8 мил). Это показывает, что MET технология имеет параметры чувствительности и шума, требуемые для обнаружения азимута с уровнем точности, который требуется для применений локализации цели.
Пример 2: Экспериментальное исследование жидкого ротора для определения уровня шума
В соответствии с одним аспектом настоящего изобретения было обнаружено, что существенной характеристикой, влияющей на работу магнетогидродинамического (MHD) насоса, является падение давления, созданное за счет силы Лоренца, воздействующей на движущийся свободный заряд. Как правило, соответствующее падение давления зависит от MHD геометрии, величины магнитного поля и электрического тока через ячейку.
Для того чтобы определить способна ли MHD накачка создавать скорость жидкого ротора, которая требуется для того, чтобы получить вычисленную здесь выше погрешность гироскопа, были проведены некоторые предварительные эксперименты для измерения скорости жидкости, которая может быть достигнута в роторном канале. Эля этого был изготовлен макет жидкого роторного канала, аналогичный показанному на чертежах. В этом эксперименте была достигнута скорость 20 см/сек в таком же электролите, который используют в MET ячейках. Таким образом, представленная здесь оценка достижимой погрешности гироскопа согласуется с моделью, которая учитывает в основном тепловой гидродинамический шум.
На базе этого нового гироскопа фирма MET Tech разработала конструкцию системы обнаружения азимута с точностью лучше чем 1 мил. Были продемонстрированы компоненты нового гироскопа, в том числе конструкция флюидного ротора со скоростью нагнетания, достаточной для достижения указанного выше уровня погрешности. Моделирующие расчеты позволили получить характеристики, показанные в Таблице 2 для MET гироскопа на различных стадиях разработки.
Фирма MET Tech разработала семейство инерциальных датчиков на базе электрохимического механизма определения направления с привлекательной комбинацией высоких характеристик, прочности, низкого энергопотребления, малых размеров и потенциально низкой стоимости. Разработанные устройства показали характеристики, сравнимые с характеристиками серийных датчиков, имеющих намного большие размеры и более высокую стоимость. Проведенные эксперименты показали, что MET датчики угловой скорости могут быть использованы для измерения направления на истинный Север с точностью лучше чем 2 мил, если использовать модуляцию. Новый MET истинный гироскоп позволяет обнаруживать азимут с еще большей точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления на географический север | 2015 |
|
RU2606673C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОДНОГО УЗЛА МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ИЗМЕРИТЕЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ДВИЖЕНИЙ (ВАРИАНТЫ) | 2006 |
|
RU2394246C2 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГЕОГРАФИЧЕСКИЙ СЕВЕР С ИСПОЛЬЗОВАНИЕМ МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ И ДАТЧИКА УГЛА НАКЛОНА | 2014 |
|
RU2578049C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |






В изобретении предлагается новая категория инерциальных датчиков (линейных и угловых акселерометров, гироскопов, инклинометров и сейсмоприемников), называемых молекулярными электронными преобразователями (MET). В отличие от других инерциальных датчиков в MET датчиках используется жидкий электролит в качестве их инерциальной массы. Предлагаемые датчики не содержат никаких прецизионных механических деталей или пружин и являются относительно простыми и дешевыми в изготовлении. 3 з.п. ф-лы, 7 ил., 2 табл., 2 пр.
1. Гироскоп, который содержит:
два пересекающихся флюидных канала,
при этом первый флюидный канал образует первый замкнутый контур, а второй канал образует второй замкнутый контур;
причем первый канал сконфигурирован для создания циркуляции жидкого электролита через первый замкнутый контур, а второй канал содержит молекулярный электронный преобразователь, предназначенный для измерения электрического тока во втором замкнутом контуре.
2. Гироскоп по п.1, в котором циркуляция жидкого электролита в первом флюидном канале поддерживается за счет магнетогидродинамических сил.
3. Гироскоп по п.2, в котором магнетогидродинамические силы созданы за счет магнетогидродинамической ячейки, содержащей постоянные магниты.
4. Гироскоп по п.3, в котором магнетогидродинамическая ячейка дополнительно содержит множество электродов внутри магнитного поля, возбужденного при помощи постоянных магнитов.
| Вулканизуемая резиновая смесь на основе синтетических каучуков | 1981 |
|
SU979412A1 |
| US 7280936 B1, 09.10.2007 | |||
| US 20040004472 A1, 08.01.2004 | |||
| US 7516660 B2, 14.04.2009 | |||
| US 20080073548 A1, 27.03.2008 | |||
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА НАКЛОНА | 2000 |
|
RU2191988C2 |

