Изобретение относится к области построения датчиков угловых координат для систем автоматического управления движением, главным образом в качестве авиагоризонта (вертикали) для летательных аппаратов любого типа.
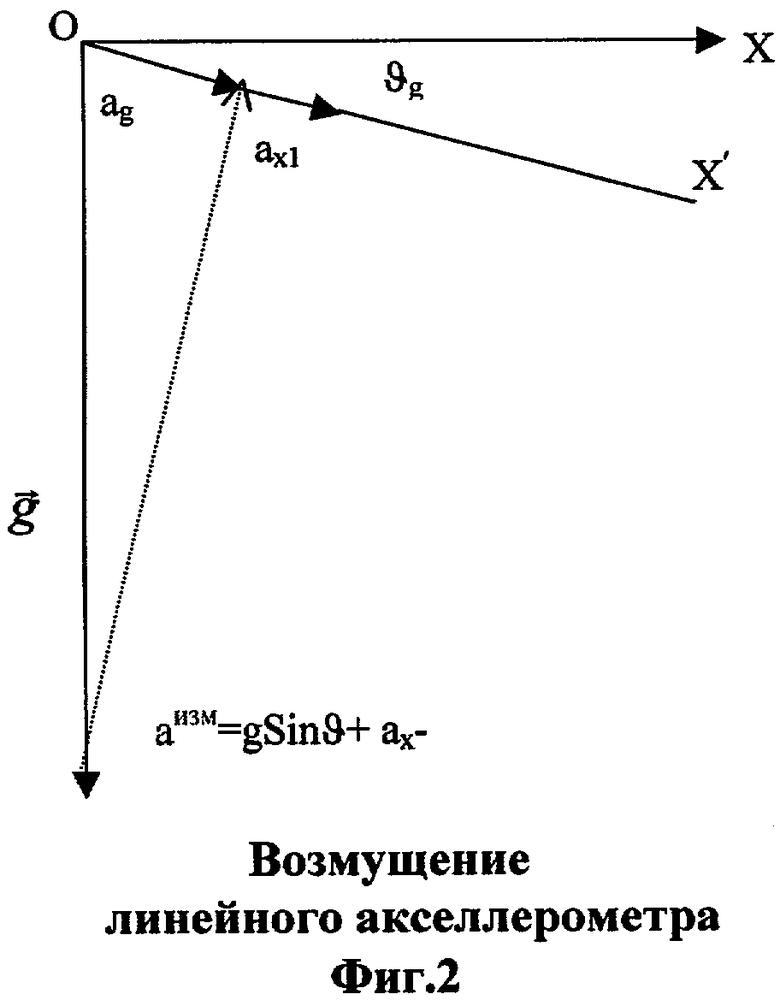
Из школьных учебников физики хорошо известен прибор, указывающий направление на центр масс Земли - местную вертикаль. Это физический маятник, либо в виде отвеса, либо жидкостный - в виде пузырькового (сферического по двум осям) уровня. Датчиками отклонения объекта от местной вертикали могут быть также два линейных акселерометра, оси чувствительности которых ориентированы по продольной и поперечной осям объекта. Все вышеупомянутые датчики указывают направление местной вертикали только на неподвижном основании. На подвижном объекте их показания возмущаются его ускорениями. Это главный недостаток физических маятников как датчиков местной вертикали. Геометрическая интерпретация этих возмущений показана на фиг.1 и 2 - по одной из осей (для определенности по продольной).
На этих фигурах обозначено:
О - начало связанной с объектом системы координат;
OX - продольная координатная ось объекта при его точной горизонтальной ориентации;
ОХ1 - продольная ось объекта при отклонениях ОХ на угол ϑ;
 - вектор силы тяжести;
- вектор силы тяжести;
ax - продольное возмущающее ускорение;
на фиг.1:
О1 - точка подвеса маятника, совмещенная с началом вышеуказанной связанной системы координат;
m - его центр масс;
ϑg - угол отклонения маятника под действием вектора ;
;
ϑа - угол отклонения маятника под действием возмущающего ускорения  ;
;
ϑизм - измеренное (возмущенное) значение угла отклонения маятника от вертикали в продольной плоскости;
на фиг.2:
ag=g-sinϑ - линейное ускорение, измеренное акселерометром по оси ОХ1 связанной системы координат, вызванное наклоном объекта к горизонту на угол ϑ;
ax1=axcosϑ - возмущающее ускорение по оси ОХ1;
aх изм=ag+аx1.
Из чертежа на фиг.1 очевидно, что ϑизм=ϑg+ϑа,
где  , поэтому
, поэтому

Аналогично для угла крена можно записать:

Из фиг.2 (для акселерометра) очевидно, что аизм=g·sinϑ+axcosϑ.
В общем случае придется решать это трансцендентное управление. Однако для малых углов, ϑ тангажа и крена можно ограничиться приближением с последующим (при необходимости) уточнением последовательными приближениями:


В настоящее время известны два способа построения невозмущаемой ускорениями объекта вертикали (измеряемых углов тангажа и крена летательных аппаратов).
Первый способ заключается в использовании гиромаятника с шулеровским периодом собственных колебаний (≈84,4 минуты). Такой маятник моделирует физический маятник Шулера длиной в радиус Земли (центр масс маятника в ее центре, а точка подвеса на поверхности) и невозмущаем ускорениями точки подвеса по определению.
Второй способ - это построение системы полной угловой ориентации объекта (включая и вертикаль) с помощью мультиантенного (3-4 пространственно разнесенных антенны) спутникового интерферометра. Интерферометр существенно усложняет спутниковый приемник - необходимо сначала сигналы всех антенн по разному промодулировать (например, разными псевдослучайными кодами), объединить в общий фидер, усилить, преобразовать частоту и отфильтровать в едином радиотракте, а затем разделить и подать на фазометры. Устройства, реализующие эти способы, достаточно сложны, громоздки и дороги.
Предлагаемый способ и устройство построения невозмущаемой вертикали использует возмущаемые ускорениями объекта измерения и компенсирует в них погрешности, вызываемые ускорениями с помощью оценок этих ускорений, полученных с помощью обычного одноантенного приемника спутниковой навигации и, по существу, прямого прототипа не имеет. Тем не менее, рассмотрим в качестве прототипа способ уменьшения влияния возмущающих ускорений в устройствах типа авиационных гирогоризонтов, где первичным датчиком местной вертикали является маятниковый прибор (двухосный акселерометр) дискретного действия - жидкостный замыкатель (переключатель), подверженный воздействию возмущающих ускорений. Этот маятниковый переключатель управляет прецессией гироскопа через датчики моментов (14, 24) на рамках его карданова подвеса.
Прототипом предлагаемого способа и устройства может быть авиагоризонт АГД-1 [1].
Фиг.3 - кинематическая схема авиагоризонта АГД-1, где обозначено:
1, 14, 16 - двигатель - генератор; 2, 5, 23 - коммутаторы; 3, 5, 10 - рамки; 4, 24 - моментные электродвигатели; 7, 12, 13, 17 - сельсины; 8, 9 - реле; 11 - индуктивный датчик; 15 - катушка; 18 - шестерня; 19, 22 - индексы; 20 - шкала; 21 - кремальера; 25 - жидкостный маятниковый переключатель; 26 - контакты выключателя коррекции; 27 - жидкостный выключатель.
Гироскоп в этих приборах выполняет 2 функции:
- сглаживания (релейной характеристики маятникового датчика и высокочастотных возмущающих ускорений);
- элемента пространственной памяти построенной вертикали на время выключения сигналов коррекции от маятникового датчика.
Снижение влияния возмущающих ускорений в способе-прототипе достигается принудительным размыканием цепей коррекции (26, 27) гироскопа от маятникового датчика на время действия сильных возмущающих ускорений (при взлете и на виражах). Недостатки способа-прототипа:
- сложность и высокая стоимость его приборной реализации;
- возмущаемость в основном режиме коррекции гироскопа от маятникового датчика.
Техническим результатом предлагаемых способа и устройства является устранение указанных недостатков, которое достигается путем измерения маятниковым прибором углов тангажа и крена и коррекции этих измерений линейными возмущающими ускорениями, оценки которых получают от спутникового приемника одним из известных способов, например численным дифференцированием (вычислением разностей соседних значений) радиальных скоростей, измеряемых упомянутым приемником.
Сущность предлагаемого изобретения заключается в том, что в устройство построения невозмущаемой безгироскопной вертикали, содержащее систему курсоуказания, физический маятник, выполненный с двухосным подвесом (сферический пузырьковый уровень или пару линейных акселерометров с продольной и поперечной ориентацией осей их чувствительности), систему автоматического управления движением, введен приемник спутниковой навигации, осуществляющий формирование оценок линейных ускорений объекта, и вычислительный блок, например микрокомпьютер, в котором возмущаемые ускорениями объекта измерения текущих углов отклонения осей связанной системы координат и местной вертикали, полученные с помощью физического маятника, непрерывно корректируются значениями этих ускорений от приемника спутниковой навигации и курсоуказателя и подаются в систему автоматического управления движением, например систему типа автопилота, и способа непрерывной коррекции, измерений маятниковым прибором или двумя линейными горизонтальными акселерометрами с помощью микрокомпьютера по данным спутникового навигационного приемника.
В устройстве в качестве курсоуказателя на объекте используют трехосный феррозонд, магнитный курс, получаемый от феррозонда, используют для пересчета географических проекций ускорений (аn и ae) в связанные (aх и ay), причем для повышения точности этого пересчета в беспилотных летательных аппаратах малого радиуса действия (до сотен км) поправку магнитного курса, приближающего его к истинному, вводят однократно при старте (от внешнего источника курсоуказания) и используют в течение всего времени полета; на самолетах с большой дальностью эту поправку периодически уточняют по данным самолетного курсоуказателя.
Упомянутый феррозонд используют в качестве элемента пространственной памяти на время пропадания сигналов спутников (например, из-за воздействия помех), для чего непрерывно вычисляют, сглаживают и хранят в памяти разности углов пространственной ориентации вектора путевой скорости и вектора напряженности магнитного поля Земли от феррозонда, сигналы от феррозонда в режиме пространственной памяти используют для управления летательным аппаратом.
Структурная схема предлагаемого устройства - на фиг.4, где
28 - антенна;
29 - спутниковый навигационный приемник;
30 - система курсоуказания;
31 - физический маятник;
32 - вычислительный блок (например, микрокомпьютер);
33 - система управления движением (например, автопилот).
Устройство работает следующим образом.
К системе курсоуказания 30, физическому маятнику 31, выполненному с двухосным подвесом или в виде сферического пузырькового уровня, или пары линейных акселерометров с продольной и поперечной ориентацией осей их чувствительности, системе автоматического управления движением 33, введены дополнительно приемник спутниковой навигации 29, осуществляющий формирование оценок линейных ускорений объекта, и вычислительный блок 32, например микрокомпьютер, в котором возмущаемые ускорениями объекта измерения текущих углов отклонения осей связанной системы координат от местной вертикали, полученные с помощью физического маятника непрерывно корректируются значениями этих ускорений от приемника спутниковой навигации и курсоуказателя и подаются в систему автоматического управления движением, например систему типа автопилота. Осуществляется непрерывная коррекция измерений, полученных маятниковым прибором или двумя линейными горизонтальными акселерометрами с помощью микрокомпьютера по данным спутникового навигационного приемника.
Точность оценки ускорения объекта способом численного дифференцирования радиальной скорости определяется очевидной формулой.

где σа - среднеквадратическая погрешность (СКП) ускорения;
Гф - геометрический фактор ухудшения точности навигационного решения (обычно не более 2-3 для горизонтальных проекций);
σv - СКП радиальных скоростей, измеряемых в спутниковом приемнике (обычно  );
);
 - множитель, отражающий удвоение дисперсии разности независимых случайных величин;
- множитель, отражающий удвоение дисперсии разности независимых случайных величин;
Δt - интервал отчетов.
Расчет по этой формуле показывает, что при секундном темпе отсчетов проекции линейных ускорений определяются с точностью в единицы миллиметров в секунду2, при 10-герцовом темпе - первые сантиметры/сек2, т.е. ≈10-3g, что сопоставимо с точностью акселерометров среднего класса и может быть использовано для коррекции возмущаемого маятника с точностью до 10-3 раз (т.е. ≈3,5 угловых минут).
Другим способом получения оценок ускорения в спутниковом приемнике является включение составляющих этого ускорения в число оцениваемых способом наименьших квадратов (СНК) [2] элементов вектора состояния объекта. Поскольку ускорения в приемнике непосредственно не измеряются, точность их выработки СНК будет иметь такой же порядок, что и при дифференцировании скорости.
Список использованной литературы:
1. В сети Интернет http://www.sla.ru/aviamaster/htm.files/giro prib.htm Рис.13 Кинематическая схема авиагоризонта АГД-1.
2. Бортовые устройства спутниковой радионавигации. // Под ред. В.С.Шебшаевича. М., 1988. С.201.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления | 2015 |
|
RU2616087C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |



Изобретение относится к области построения датчиков угловых координат для систем автоматического управления движением, главным образом, в качестве авиагоризонта (вертикали) для летательных аппаратов любого типа. Сущность изобретения: возмущаемые ускорениями объекта измерения текущих углов отклонения осей связанной системы координат и местной вертикали, полученные с помощью физического маятника, непрерывно корректируются значениями этих ускорений от приемника спутниковой навигации и курсоуказателя, в качестве которого может быть использован трехосный феррозонд. Техническим результатом является упрощение способа и снижение стоимости его приборной реализации. 2 н. и 2 з.п. ф-лы, 4 ил.
для физического маятника:

для линейных акселерометров:

| ФРИДЛЕНДЕР Г.О | |||
| и др | |||
| Авиационные гироскопические приборы, М., Оборонгиз, 1961, с.157-166 | |||
| Гировертикаль | 1989 |
|
SU1789858A1 |
| АВИАГОРИЗОНТ | 1976 |
|
SU705838A1 |
| US 4882845 A, 28.11.1989 | |||
| US 5666111 A, 09.09.1997. | |||

