Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе помощи при парковке и способу помощи при парковке, используемым в беспроводной системе подачи электрической мощности, которая выполняет беспроводную подачу электрической мощности между блоком катушки наземной стороны и блоком катушки на стороне транспортного средства.
Уровень техники
[0002] Известно устройство помощи при парковке для беспроводной подачи электрической мощности (см. патентный документ 1). В патентном документе 1 изображение с задней камеры отображается, чтобы направлять транспортное средство во время парковки задним ходом. После того как блок наземной стороны исчезает из изображения, интервал несовмещения между блоком наземной стороны и блоком на стороне транспортного средства вычисляется в зависимости от значения напряжения, измеряемого посредством блока на стороне транспортного средства, и отображается, чтобы направлять транспортное средство.
Список ссылок
Патентные документы
[0003] Патентный документ 1. Публикация японской патентной заявки № 2011-15549
Сущность изобретения
[0004] Существует диапазон (область с возможностью подачи электрической мощности) для интервала несовмещения, допустимого при выполнении подачи электрической мощности. Область с возможностью подачи электрической мощности в значительной степени зависит от промежутка между блоком наземной стороны и блоком на стороне транспортного средства. Однако, изобретатели настоящей заявки признали проблему, существующую в патентном документе 1, что, поскольку то, возможна или невозможна подача электрической мощности, определяется без учета этого промежутка, большая область с возможностью подачи электрической мощности не может быть задана, и удобство при парковке является плохим.
[0005] Настоящее изобретение было выполнено, чтобы решать такие обычные проблемы, и его целью является предоставление системы помощи при парковке и способа помощи при парковке, посредством которых диапазон возможности подачи электрической мощности увеличивается, и удобство при парковке улучшается.
[0006] Система помощи при парковке настоящего изобретения определяет позицию транспортного средства относительно, по меньшей мере, каждой из области с возможностью подачи электрической мощности (первой области) в случае, когда промежуток между блоком катушки наземной стороны и блоком катушки на стороне транспортного средства является максимальным, и области с возможностью подачи электрической мощности (второй области) в случае, когда промежуток является минимальным, определяет возможность подачи электрической мощности на основе результата определения по позиции и отображает результат определения по возможности подачи электрической мощности для водителя.
Краткое описание чертежей
[0007]
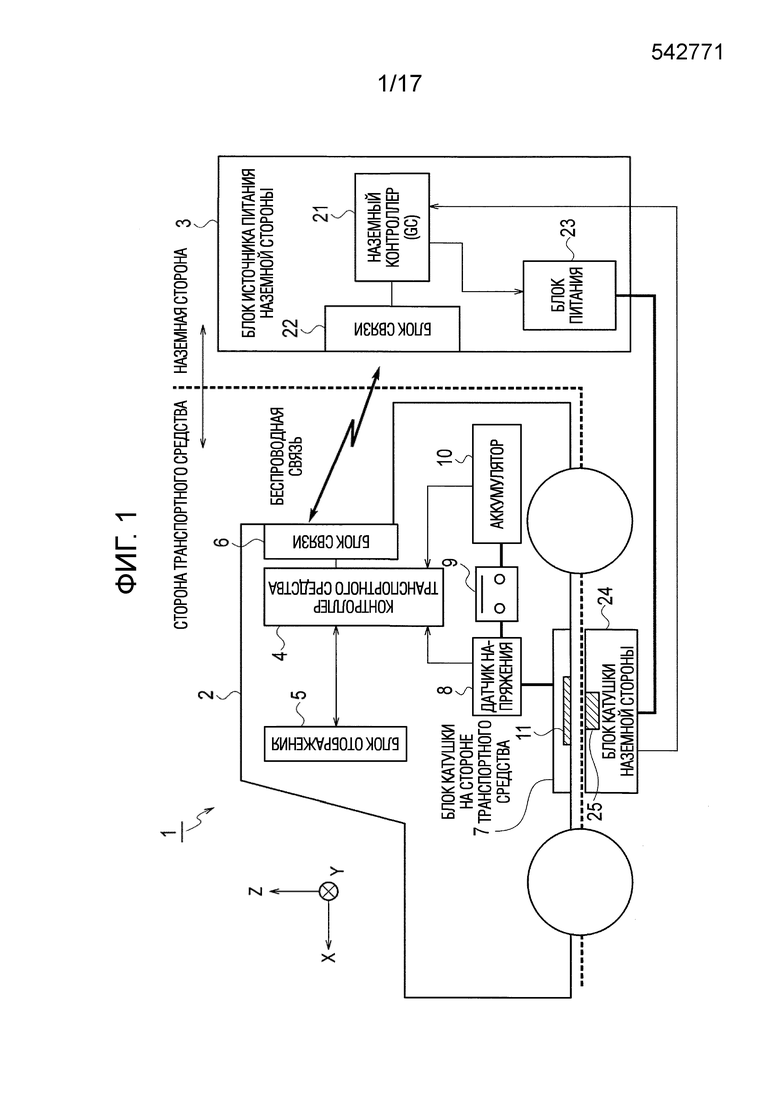
[Фиг. 1] Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию беспроводной системы подачи электрической мощности в вариантах осуществления.
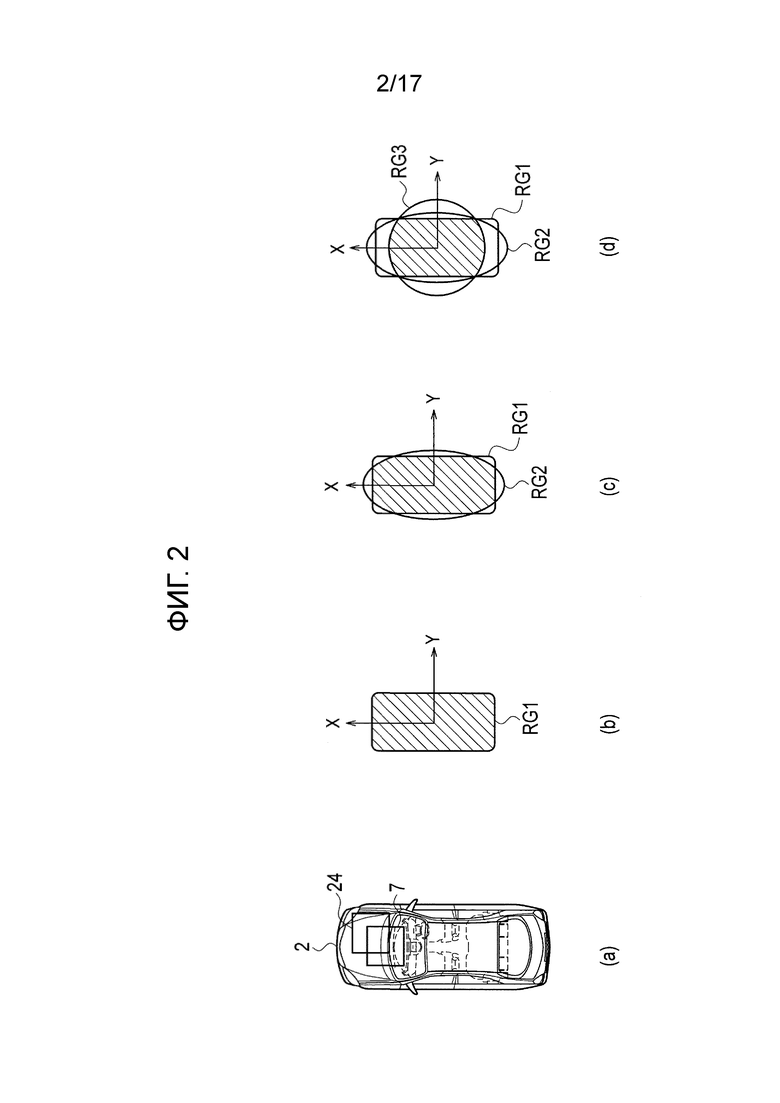
[Фиг. 2] Часть (a) на фиг. 2 - это вид сверху для объяснения позиции транспортного средства 2 относительно блока 24 катушки наземной стороны, а части (b)-(d) на фиг. 2 - это схематичные виды для объяснения допустимых диапазонов величины несовмещения (RG1-RG3).
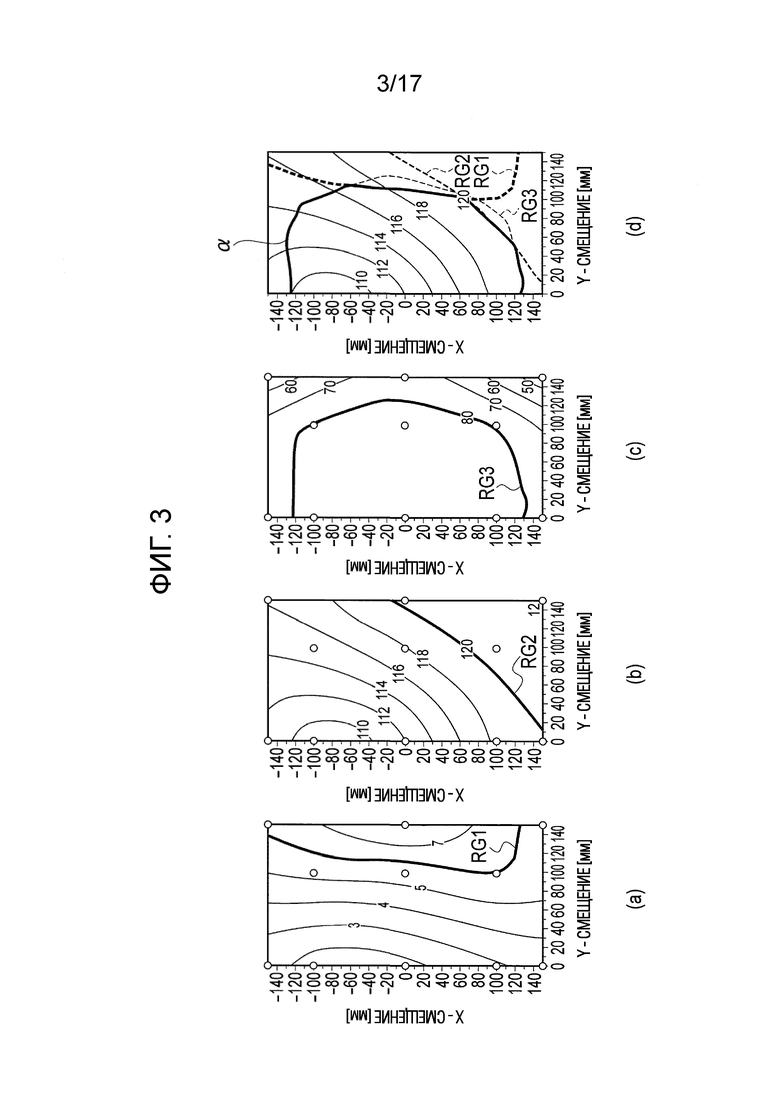
[Фиг. 3] Части (a)-(d) на фиг. 3 - являются, соответственно, графиками, изображающими допустимый диапазон (RG1) величины несовмещения, в котором магнитное поле утечки удовлетворяет указанному значению, допустимый диапазон (RG2) величины несовмещения, в котором интенсивность радиоволны, включающей в себя основную гармонику, удовлетворяет указанному значению, допустимый диапазон (RG3) величины несовмещения, в котором эффективность подачи электрической мощности удовлетворяет указанному значению, и область (α) с возможностью подачи электрической мощности, в которой все допустимые диапазоны RG1-RG3 величины несовмещения перекрывают друг друга.
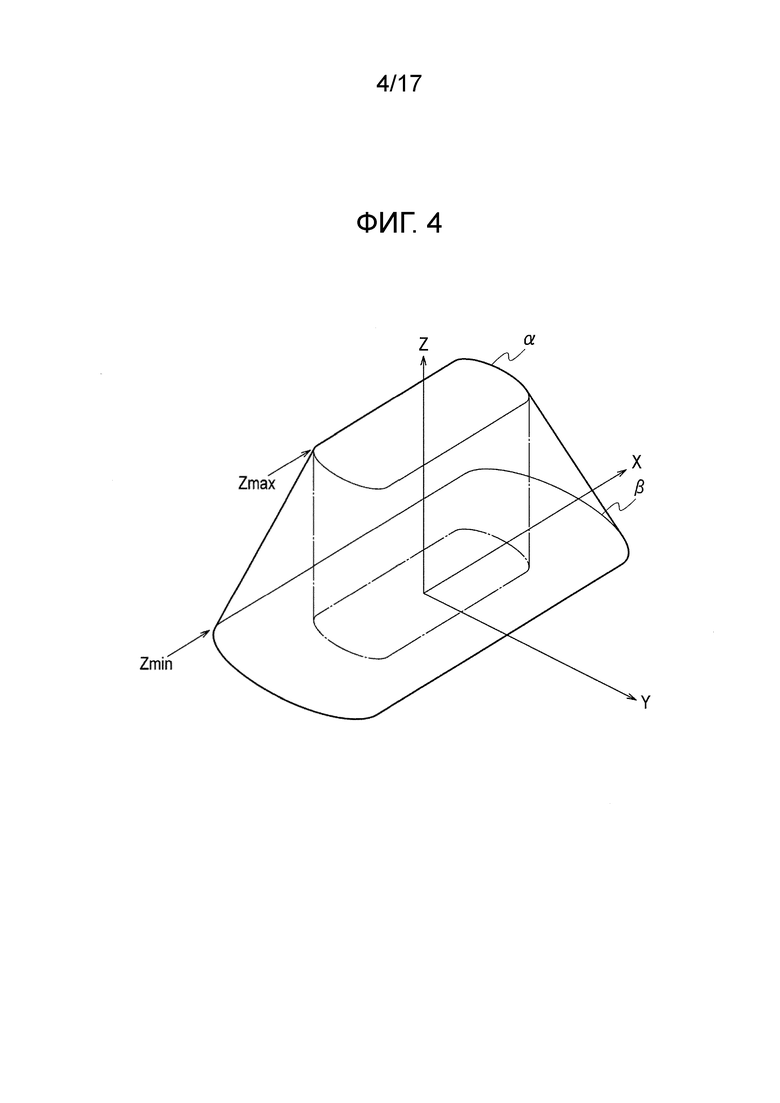
[Фиг. 4] Фиг. 4 - это схематичный вид, иллюстрирующий максимальное значение (Zmax) и минимальное значение (Zmin) промежутка, первую область (α) и вторую область (α+β).
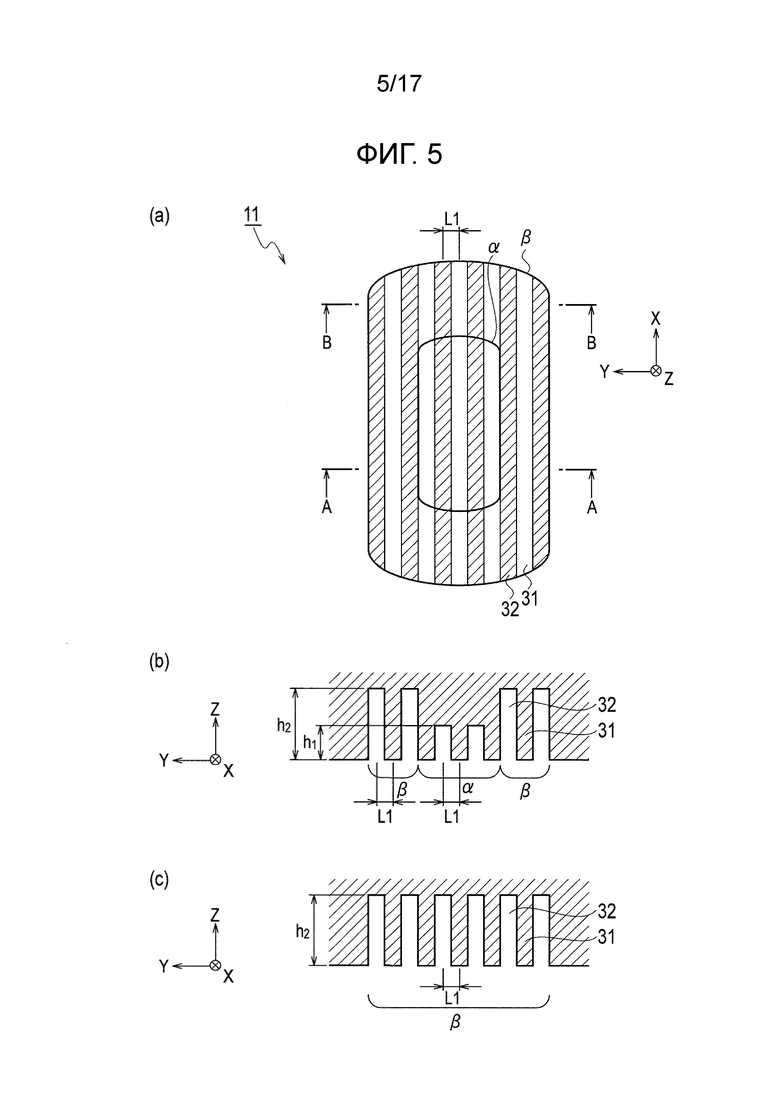
[Фиг. 5] Часть (a) на фиг. 5 - это вид сверху, иллюстрирующий первую структуру с углублениями и выступами и вторую структуру с углублениями и выступами, сформированные в области на первой из наземной стороны и стороны транспортного средства, часть (b) на фиг. 5 - это вид в поперечном разрезе, взятый в поперечном сечении A-A в части (a) на фиг. 5, а часть (c) на фиг. 5 - это вид в поперечном разрезе, взятый в поперечном сечении B-B в части (a) на фиг. 5.
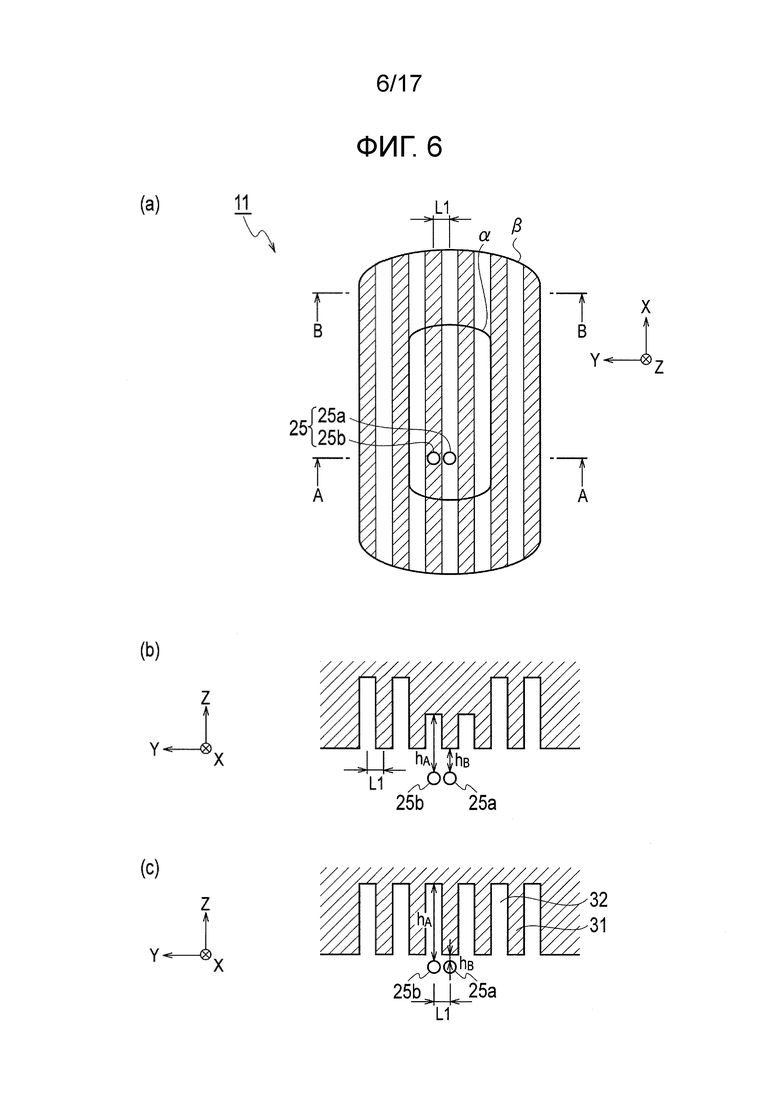
[Фиг. 6] Часть (a) на фиг. 6 - это вид сверху, в котором два блока (25a, 25b) измерения расстояния наложены на вид сверху в части (a) на фиг. 5, часть (b) на фиг. 6 - это вид в поперечном разрезе, взятый в поперечном сечении A-A в части (a) на фиг. 6, а часть (c) на фиг. 6 - это вид в поперечном разрезе, взятый в поперечном сечении B-B в части (a) на фиг. 6.
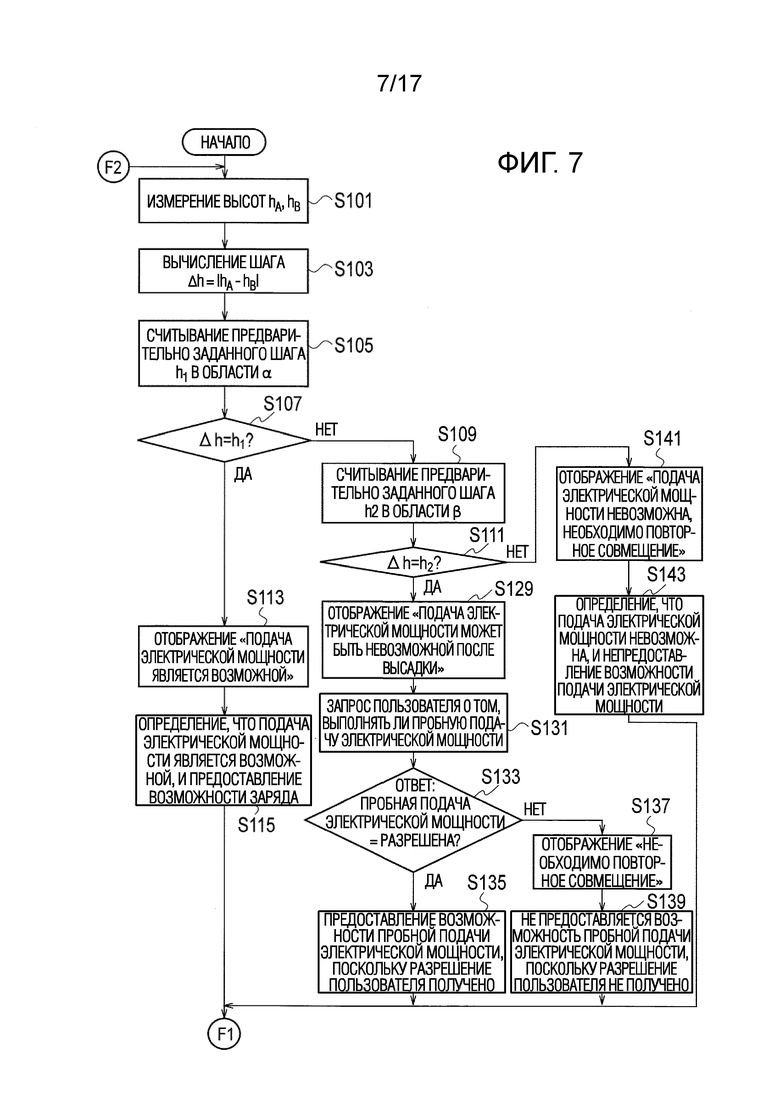
[Фиг. 7] Фиг. 7 - это часть блок-схемы последовательности операций, изображающей способ помощи при парковке в первом варианте осуществления.
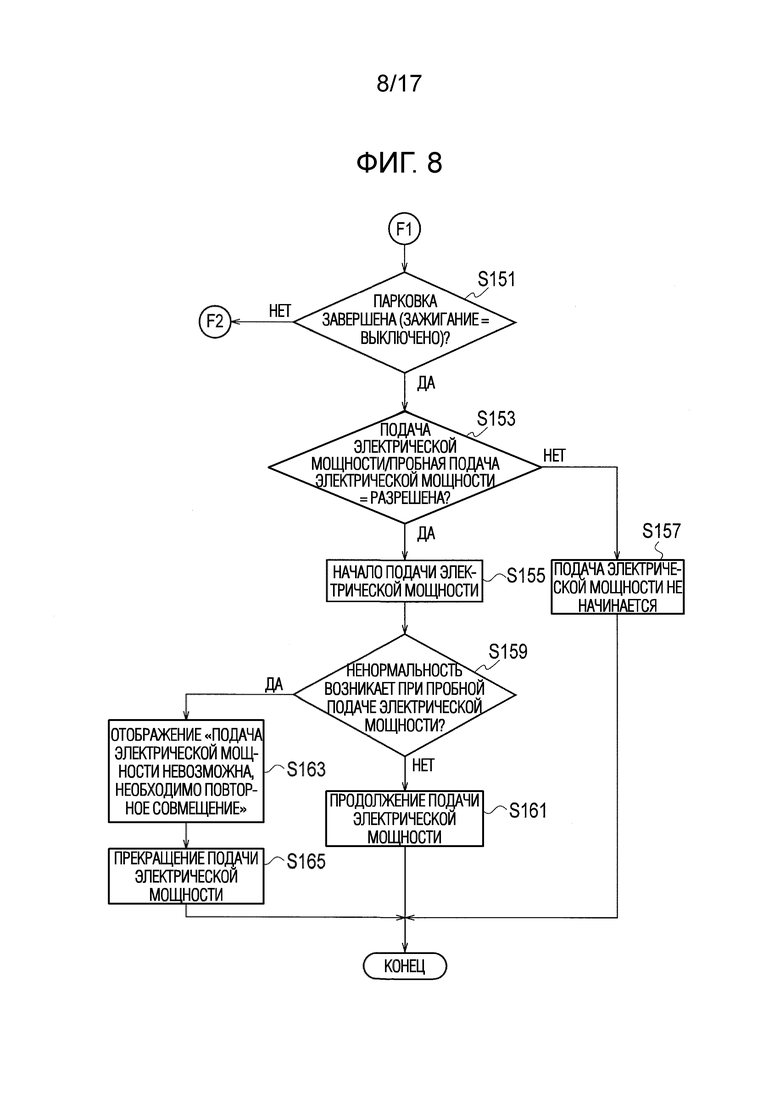
[Фиг. 8] Фиг. 8 - это другая часть блок-схемы последовательности операций, изображающей способ помощи при парковке в первом варианте осуществления, которая следует за фиг. 7.
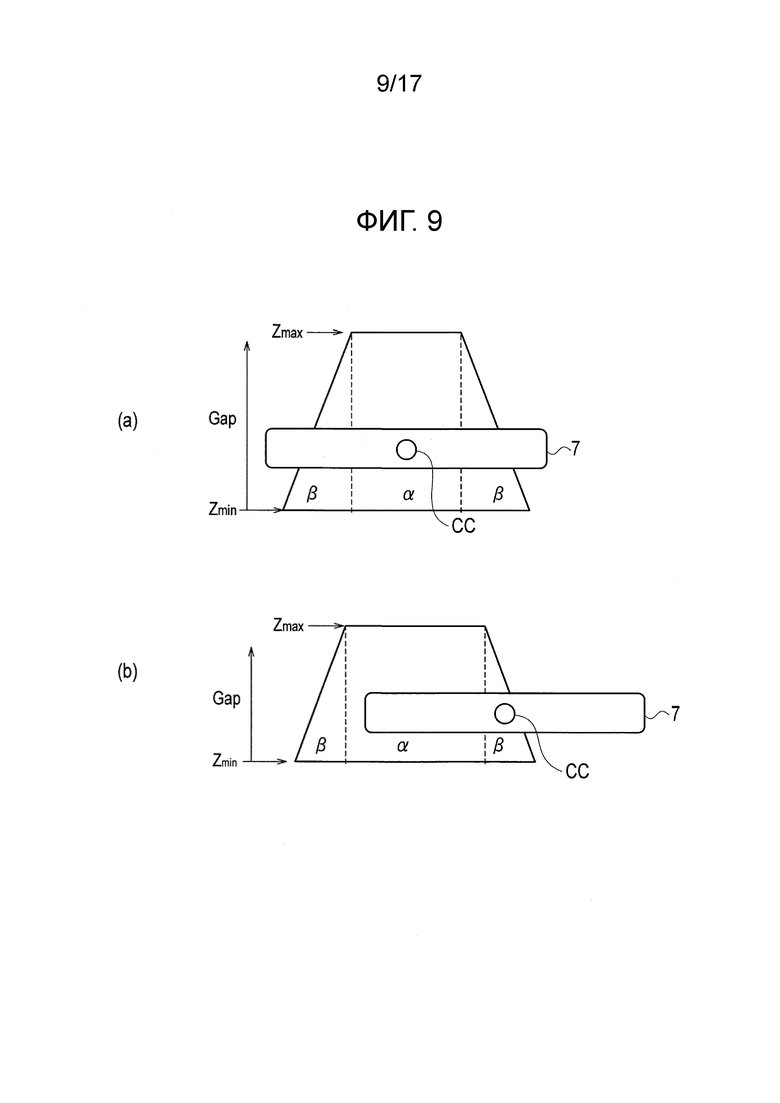
[Фиг. 9] Части (a) и (b) на фиг. 9 являются, каждая, схематичным видом, иллюстрирующим пример изображения, отображаемого в блоке 5 отображения.
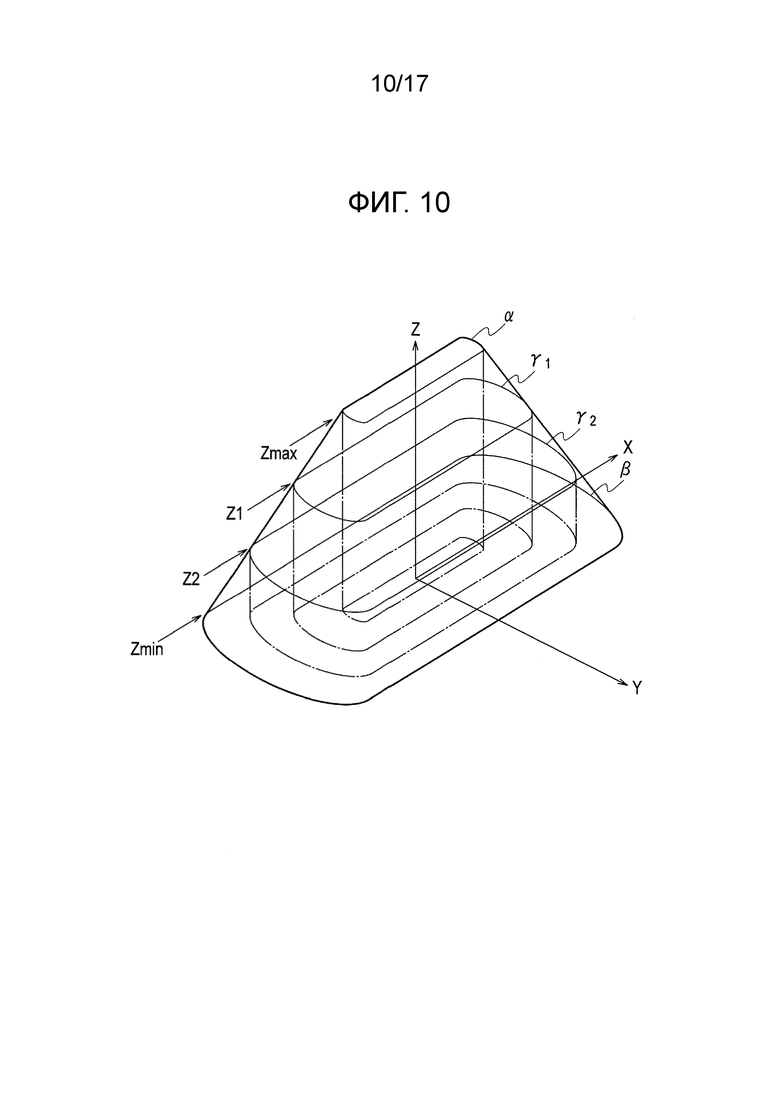
[Фиг. 10] Фиг. 10 - это схематичный вид, иллюстрирующий максимальное значение (Zmax), минимальное значение (Zmin), Z1 и Z2 промежутка, первую область (α), вторую область (α+β), первую промежуточную область (α+γ1) и вторую промежуточную область (α+γ1+γ2).
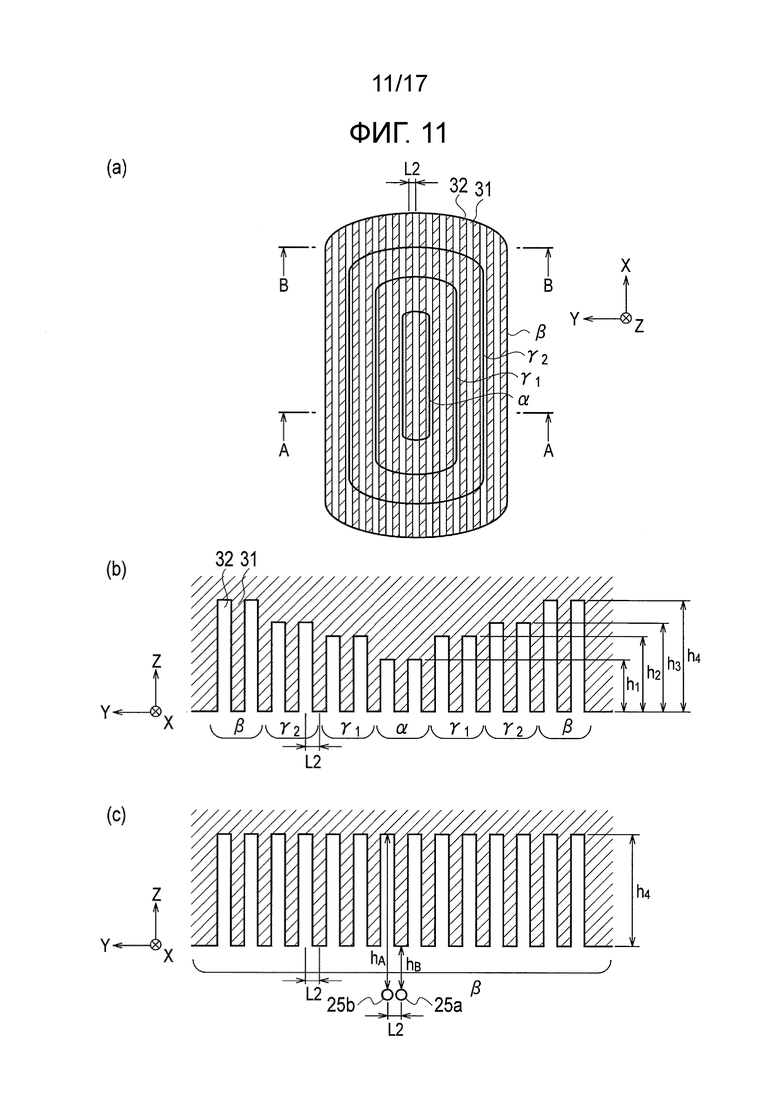
[Фиг. 11] Часть (a) на фиг. 11 - это вид сверху, иллюстрирующий первую структуру α с углублениями и выступами, вторую структуру β с углублениями и выступами, первую промежуточную структуру γ1 с углублениями и выступами и вторую промежуточную структуру γ2 с углублениями и выступами, которые формируются в области на первой из наземной стороны и стороны транспортного средства, часть (b) на фиг. 11 - это вид в поперечном разрезе, взятый в поперечном сечении A-A в части (a) на фиг. 11, а часть (c) на фиг. 11 - это вид в поперечном разрезе, взятый в поперечном сечении B-B в части (a) на фиг. 11.
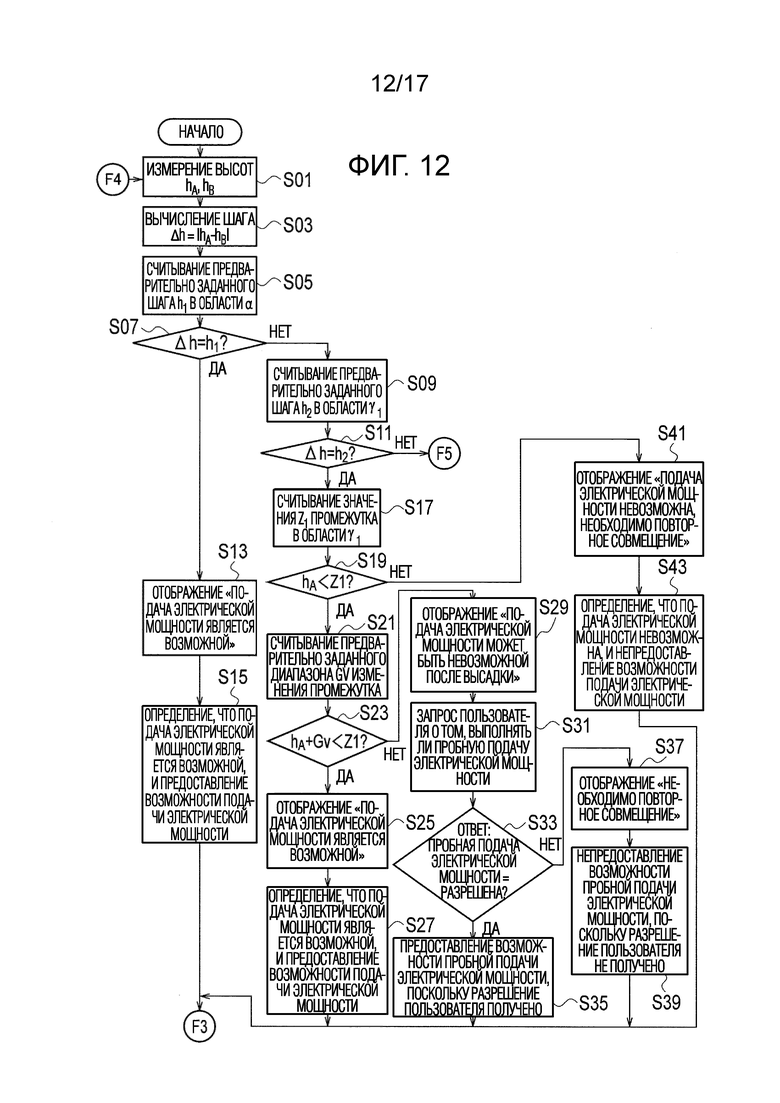
[Фиг. 12] Фиг. 12 - это часть (1/3) блок-схемы последовательности операций, изображающей способ помощи при парковке во втором варианте осуществления.
[Фиг. 13] Фиг. 13 - это другая часть (2/3) блок-схемы последовательности операций, изображающей способ помощи при парковке во втором варианте осуществления.
[Фиг. 14] Фиг. 14 - это другая часть (3/3) блок-схемы последовательности операций, изображающей способ помощи при парковке во втором варианте осуществления.
[Фиг. 15] Части (a) и (b) на фиг. 15 являются, каждая, схематичным видом, иллюстрирующим пример изображения, отображаемого в блоке 5 отображения (1/3).
[Фиг. 16] Части (a)-(c) на фиг. 16 являются, каждая, схематичным видом, иллюстрирующим пример изображения, отображаемого в блоке 5 отображения (2/3).
[Фиг. 17] Части (a)-(c) на фиг. 17 являются, каждая, схематичным видом, иллюстрирующим пример изображения, отображаемого в блоке 5 отображения (3/3).
Подробное описание вариантов осуществления
[0008] Варианты осуществления описываются ниже со ссылкой на множество чертежей. В последующем описании схематично описывается конфигурация системы помощи при парковке. Отметим, что на схематичных чертежах соотношения между толщиной и измерениями плоскости, отношения размеров в плоскости и т.п. иллюстрируются преувеличенным образом, чтобы облегчать понимание. Одинаковые элементы обозначаются одинаковыми ссылочными номерами, и перекрывающееся описание пропускается.
[0009] [Первый вариант осуществления]
[Беспроводная система подачи электрической мощности]
Сначала беспроводная система подачи электрической мощности описывается со ссылкой на чертежи. Беспроводная система подачи электрической мощности - это система, которая выполняет беспроводную подачу электрической мощности между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства. В частности, беспроводная система подачи электрической мощности является системой, которая может беспроводным образом подавать электрическую мощность от катушки, заглубленной под дорогой (блока 24 катушки наземной стороны), к катушке, установленной рядом с поверхностью днища транспортного средства 2 (блоку 7 катушки на стороне транспортного средства), когда транспортное средство остановлено, с помощью электромагнитной индукции и явления резонанса. Подаваемая электрическая мощность отправляется аккумулятору 10 (включающему в себя аккумуляторную батарею) через датчик 8 напряжения и релейный переключатель 9, и аккумулятор 10 заряжается посредством отправленной электрической мощности.
[0010] В качестве информации, указывающей состояние подачи электрической мощности, сигнал, указывающий значение напряжения заряда, измеренное посредством датчика 8 напряжения, отправляется от датчика 8 напряжения контроллеру 4 транспортного средства. Сигнал, указывающий состояние заряда (SOC) или состояние оставшейся емкости аккумулятора 10, отправляется от аккумулятора 10 контроллеру 4 транспортного средства. Контроллер 4 транспортного средства управляет соединением и разъединением (включением/выключением) релейного переключателя 9 на основе отправленных сигналов, описанных выше, и передает информацию блоку 3 источника питания наземной стороны через блок 6 связи.
[0011] Между тем, беспроводная система подачи электрической мощности включает в себя блок 3 источника питания наземной стороны и блок 24 катушки наземной стороны в качестве конфигураций на наземной стороне. Блок 3 источника питания наземной стороны включает в себя: блок 23 питания, который преобразует мощность переменного тока (AC), подаваемую от сетевого источника питания, в AC-мощность с AC-напряжением, AC-током и AC-периодом, которые должны использоваться в беспроводной подаче электрической мощности, и который отправляет преобразованную AC-мощность блоку 24 катушки наземной стороны; наземный контроллер 21, который управляет операциями блока 23 питания; и блок 22 связи, который связывается беспроводным образом с блоком 6 связи, установленным в транспортном средстве 2. Блок 24 катушки наземной стороны беспроводным образом подает AC-мощность, отправленную от блока 23 питания, блоку 7 катушки на стороне транспортного средства с помощью электромагнитной индукции и явления резонанса. Сигналы, указывающие состояние подачи питания и состояние заряда (SOC) или состояние оставшейся емкости аккумулятора 10, которые передаются от блока 6 связи на стороне транспортного средства, принимаются блоком 22 связи. Принятые сигналы отправляются наземному контроллеру 21, и наземный контроллер 21 управляет преобразованием AC-мощности и передачей электрической мощности блоку 24 катушки наземной стороны посредством блока 23 питания на основе этих сигналов. Беспроводная система подачи электрической мощности может, таким образом, выполнять беспроводную подачу электрической мощности между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства и заряжать аккумулятор 10, установленный в транспортном средстве 2.
[0012] [Система помощи при парковке]
Далее описывается система помощи при парковке, используемая в беспроводной системе подачи электрической мощности. Для того, чтобы выполнять беспроводную подачу электрической мощности, описанную выше, как иллюстрировано в части (a) на фиг 2, позиция транспортного средства 2, более конкретно, позиция блока 7 катушки на стороне транспортного средства должна быть совмещена с блоком 24 катушки наземной стороны заранее. Система 1 помощи при парковке является системой, которая помогает в действии выравнивания транспортного средства, т.е., парковке, которая выполняется водителем транспортного средства 2, являющимся пользователем системы 1 помощи при парковке.
[0013] В частности, система 1 помощи при парковке определяет позиционные соотношения между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства и представляет информацию о возможности подачи электрической мощности водителю транспортного средства 2 на основе результата этого определения. Диапазон допустимой величины несовмещения между катушками (7, 24) при выполнении подачи электрической мощности (область с возможностью подачи электрической мощности) задается заранее на основе блока 24 катушки наземной стороны. Например, как иллюстрировано в частях (b)-(d) на фиг. 2, диапазон, в котором допустимый диапазон (RG1) величины несовмещения, допустимый диапазон (RG2) величины несовмещения и допустимый диапазон (RG3) величины несовмещения перекрывают друг друга, может быть задан в качестве "области с возможностью подачи электрической мощности", допустимый диапазон (RG1) величины несовмещения является диапазоном, в котором магнитное поле утечки удовлетворяет указанному значению, допустимый диапазон (RG2) несовмещения является диапазоном, в котором интенсивность радиоволны, включающей в себя основную гармонику, удовлетворяет указанному значению, допустимый диапазон (RG3) величины несовмещения является диапазоном, в котором эффективность подачи электрической мощности удовлетворяет указанному значению. Область с возможностью подачи электрической мощности может быть задана, принимая во внимание также допустимые диапазоны величины несовмещения, на основе выходного значения мощности, отправляемой от блока 24 катушки наземной стороны, и температуры катушек (7, 24). Части (a)-(d) на фиг. 3 изображают допустимые диапазоны (RG1-RG3) величины несовмещения и область (α, первую область) с возможностью подачи электрической мощности в случае, когда максимальное значение (Zmax) промежутка между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства устанавливается равным 150 мм. Единицами измерения изолиний являются [мкТ] в части (a), [дБмкВ/м] в частях (b) и (d) и [%] в части (c) на фиг. 3. Кроме того, X-ось - это ось, параллельная направлению движения транспортного средства 2, Y-ось - это ось, перпендикулярная направлению движения транспортного средства 2, а Z-ось - это ось, перпендикулярная X-оси и Y-оси. Способ задания "области с возможностью подачи электрической мощности" в каждом случае является просто примером, и "область с возможностью подачи электрической мощности" может быть определена с помощью другого способа.
[0014] Система 1 помощи при парковке определяет, находится ли блок 7 катушки на стороне транспортного средства в области с возможностью подачи электрической мощности, время от времени в течение парковки и представляет информацию о возможности подачи электрической мощности водителю транспортного средства 2 на основе результата этого определения.
[0015] Диапазон допустимой величины несовмещения между катушками (7, 24) при подаче электрической мощности (область с возможностью подачи электрической мощности) зависит в значительной степени от расстояния, т.е., промежутка между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства. Когда расстояние (промежуток) между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства становится меньше, эффективность подачи электрической мощности между катушками увеличивается, и область с возможностью подачи электрической мощности, таким образом, становится больше. Между тем, когда расстояние (промежуток) между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства становится больше, эффективность подачи электрической мощности между катушками уменьшается, и область с возможностью подачи электрической мощности, таким образом, становится меньше.
[0016] Промежуток между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства изменяется между транспортными средствами 2 в зависимости от производственных допусков транспортных средств 2, включающих в себя производственные допуски и монтажные допуски частей, формирующих транспортные средства. Кроме того, в некотором транспортном средстве 2, поскольку посадка и высадка пассажиров и погрузка и разгрузка багажа вызывают изменение высоты транспортного средства, промежуток изменяется в зависимости от состояния пассажиров и багажа. Система 1 помощи при парковке задает максимальное значение (Zmax) и минимальное значение (Zmin) промежутка заранее, принимая во внимание величину изменения в промежутке. Пример максимального значения (Zmax) промежутка равен 160 мм, а пример минимального значения (Z min) промежутка равен 100 мм.
[0017] Кроме того, система 1 помощи при парковке задает заранее, по меньшей мере, область (α, первую область) с возможностью подачи электрической мощности в случае, когда промежуток между блоком 24 катушки наземной стороны и блоком 7 катушки на стороне транспортного средства является максимальным, и область (α+β, вторую область) с возможностью подачи электрической мощности в случае, когда промежуток является минимальным.
[0018] Фиг. 4 иллюстрирует схематичный вид максимального значения (Zmax) и минимального значения (Zmin) промежутка, первой области (α) и второй области (α+β), которые задаются заранее, как описано выше. Промежуток увеличивается в направлении Z-оси. Область (α+β, вторая область) с возможностью подачи электрической мощности в случае, когда промежуток получает минимальное значение (Zmin), является большой, в то время как область (α, первая область) с возможностью подачи электрической мощности в случае, когда промежуток получает максимальное значение (Zmax), является небольшой. Вторая область (α+β) включает в себя всю первую область (α). На фиг. 4 минимальное значение (Z min) промежутка задается в Z=0, так что XY-плоскость совпадает со второй областью (β).
[0019] Затем, система 1 помощи при парковке определяет позицию транспортного средства 2 относительно каждой из области (α, первой области) с возможностью подачи электрической мощности в случае, когда промежуток является максимальным, и области (α+β, второй области) с возможностью подачи электрической мощности в случае, когда промежуток является минимальным, и помогает при парковке на основе результата этого определения. Подробно, система 1 помощи при парковке определяет позицию блока 7 катушки на стороне транспортного средства относительно каждой из первой области (α) и второй области (α+β). Это увеличивает допустимый диапазон подачи электрической мощности и улучшает удобство при парковке по сравнению с диапазоном и удобством в сравнительном примере, в котором только первая область (α) является целью определения.
[0020] Например, как иллюстрировано в части (a) на фиг. 5, система 1 помощи при парковке включает в себя первую структуру α с углублениями и выступами, сформированную в области, которая соответствует первой области (α) и которая находится на первой стороне из наземной стороны и стороны транспортного средства, и вторую структуру β с углублениями и выступами, которая формируется в области, которая соответствует области во второй области (α+β) за исключением первой области (α), и которая находится на первой стороне. Когда структуры (α, β) с углублениями и выступами формируются в областях на стороне транспортного средства, как иллюстрировано на фиг. 1, первая структура α с углублениями и выступами и вторая структура β с углублениями и выступами могут быть сформированы на нижней поверхности крышки 11 катушки транспортного средства, расположенной рядом с донной поверхностью блока 7 катушки на стороне транспортного средства. В качестве примера, первая структура α с углублениями и выступами и вторая структура β с углублениями и выступами могут быть сформированы на верхней поверхности блока 24 катушки наземной стороны.
[0021] Пример ширины первой структуры α с углублениями и выступами в поперечном направлении транспортного средства (направлении Y-оси) равен 160 мм, а пример ширины первой структуры α с углублениями и выступами в направлении движения (направлении X-оси) равен 80 мм. Пример ширины второй структуры β с углублениями и выступами в поперечном направлении транспортного средства (направлении Y-оси) равен 300 мм, а пример ширины второй структуры β с углублениями и выступами в направлении движения (направлении X-оси) равен 180 мм.
[0022] Первая область (α), иллюстрированная в части (a) на фиг. 5, соответствует первой области (α), спроецированной на XY-плоскости на фиг. 4. Каждая из первой структуры α с углублениями и выступами и второй структуры β с углублениями и выступами формируется посредством поочередного и повторяющегося размещения участков 31 выступов и участков 32 углублений в направлении Y-оси. Участки 31 выступов и участки 32 углублений протягиваются параллельно друг другу в направлении X-оси. Плоский образ участков 31 выступов и участков 32 углублений, таким образом, является рисунком в полоску.
[0023] Как иллюстрировано в частях (b) и (c) на фиг. 5, глубина участков углублений или высота участков выступов (h1) в первой структуре α с углублениями и выступами отличается от глубины участков углублений или высоты участков выступов (h2) во второй структуре β с углублениями и выступами. Кроме того, шаг (L1 ) в первой структуре α с углублениями и выступами является таким же, что и шаг (L1) во второй структуре β с углублениями и выступами. Другими словами ширины (L1) участков 31 выступов и участков 32 углублений в направлении Y-оси являются одинаковыми в обеих из первой структуры α с углублениями и выступами и второй структуры β с углублениями и выступами. Пример глубины участков углублений или высоты участков выступов (h1, h2) равен 1-3 мм, а пример шага (L1) равен 5-10 мм.
[0024] Как иллюстрировано в частях (a)-(c) на фиг. 6, система 1 помощи при парковке дополнительно включает в себя, по меньшей мере, два блока (25a, 25b) измерения расстояния, которые располагаются с интервалом, равным шагу (L1) в первой структуре с углублениями и выступами и второй структуре с углублениями и выступами, на другой стороне из наземной стороны и стороны транспортного средства. Блоки (25a, 25b) измерения расстояния размещаются в направлении Y-оси и измеряют расстояние в Z-направлении. Например, блоки (25a, 25b) измерения расстояния являются сонарами или оптическими локаторами и измеряют расстояние в Z-направлении с помощью отражения звука или света. Соответственно, спаренные блоки (25a, 25b0 измерения расстояния могут обнаруживать звук или свет, отражаемый участком 31 выступа и участком 32 углубления, соответственно, независимо от их позиции относительно структур (α, β) с углублениями и выступами. Следовательно, блоки (25a, 25b) измерения расстояния могут измерять расстояния (hA, hB) до участка 31 выступа и участка 32 углубления одновременно.
[0025] Система помощи при парковке (блок определения позиции транспортного средства) может определять позицию транспортного средства 2 относительно блока 24 катушки наземной стороны, сравнивая разницу (Δh) между расстояниями (hA, hB), измеренными соответственно посредством двух блоков (25a, 25b) измерения расстояния, с глубиной участков углублений или высотой участков выступов (h1, h2). Другими словами, система помощи при парковке может определять позицию транспортного средства относительно каждой из первой области (α), в которой подача электрической мощности является возможной, когда промежуток является максимальным, и второй области (α+β), в которой подача электрической мощности является возможной, когда промежуток является минимальным.
[0026] Когда структуры (α, β) с углублениями и выступами формируются в областях на стороне транспортного средства, блоки (25a, 25b) измерения расстояния устанавливаются на наземной стороне. Как иллюстрировано на фиг. 1, блоки (25a, 25b) измерения расстояния могут быть установлены на верхней поверхности крышки 25 наземной катушки, расположенной рядом с верхней поверхностью блока 24 наземной катушки. В качестве другого примера, блоки (25a, 25b) измерения расстояния могут быть сформированы на нижней поверхности блока 7 катушки на стороне транспортного средства. Предоставление сочетания структур (α, β) с углублениями и выступами и блоков (25a, 25b) измерения расстояния на стороне транспортного средства и наземной стороне, как описано выше, предоставляет возможность определения позиции транспортного средства относительно первой и второй областей.
[0027] Система помощи при парковке включает в себя, в качестве вычислительных устройств, блок определения позиции транспортного средства, выполненный с возможностью определять позицию транспортного средства относительно каждой из первой области (α), в которой подача электрической мощности является возможной, когда промежуток между блоком катушки на стороне транспортного средства и блоком катушки наземной стороны является максимальным, и второй области (α+β), в которой подача электрической мощности является возможной, когда промежуток является минимальным, и блок определения возможности подачи, выполненный с возможностью определять возможность подачи электрической мощности на основе результата определения посредством блока определения позиции транспортного средства.
[0028] Например, блок определения позиции транспортного средства определяет, в какое одно из следующих трех состояний попадает позиция транспортного средства..
(1) В пределах первой области (α)
(2) За пределами первой области (α) и в пределах второй области (α+β)
(3) За пределами второй области (α+β)
[0029] Когда разница (Δh) между расстояниями (hA, hB) соответствует глубине участков углублений или высоте участков выступов (h1), блок определения позиции транспортного средства определяет, что позиция транспортного средства находится "в пределах первой области (α)". Когда разница (Δh) между расстояниями (hA, hB) соответствует глубине участков углублений или высоте участков выступов (h2), блок определения позиции транспортного средства определяет, что позиция транспортного средства находится "за пределами первой области (α) и в пределах второй области (α+β)". Когда разница (Δh) между расстояниями (hA, hB) не соответствует ни одной из глубин участков углублений или высот участков выступов (h1, h2), блок определения позиции транспортного средства определяет, что позиция транспортного средства находится "за пределами второй области (α+β)".
[0030] Когда позиция транспортного средства определяется как находящаяся в пределах первой области (α), электрическая мощность может подаваться, даже если промежуток получает максимальное значение (Zmax), присвоенное заранее. Соответственно, блок определения возможности подачи определяет, что "подача электрической мощности является возможной". Когда позиция транспортного средства определяется как находящаяся за пределами первой области (α) и в пределах второй области (α+β), определение возможной/невозможной подачи электрической мощности может изменяться в зависимости от размера промежутка и изменения промежутка. Соответственно, блок определения возможности подачи определяет, что "подача электрической мощности может быть невозможной". Альтернативно, блок определения возможности подачи может определять, что существует возможность состояния изменения подачи электрической мощности с возможного на невозможное в зависимости от изменения промежутка. Когда позиция транспортного средства определяется как находящаяся за пределами второй области (α+β), электрическая мощность не может подаваться, даже если промежуток принимает минимальное значение (Zmin), присвоенное заранее. Соответственно, блок определения возможности подачи определяет, что "подача электрической мощности невозможна".
[0031] В системе помощи при парковке эти вычислительные устройства (блок определения позиции транспортного средства, блок определения возможности подачи) могут быть реализованы на одной или обеих из стороны транспортного средства и наземной стороны. В случае, когда вычислительные устройства реализуются на стороне транспортного средства, контроллер 4 транспортного средства, иллюстрированный на фиг. 1, выполняет предварительно установленную программу и, таким образом, функционирует как блок определения позиции транспортного средства и блок определения возможности подачи, на основе расстояний (hA, hB), измеренных посредством блоков (25a, 25b) измерения расстояния. Между тем, в случае, когда вычислительные устройства реализуются на наземной стороне, наземный контроллер 21, иллюстрированный на фиг. 1, выполняет предварительно установленную программу и, таким образом, функционирует как блок определения позиции транспортного средства и блок определения возможности подачи, на основе расстояний (hA, hB), измеренных посредством блоков (25a, 25b) измерения расстояния. В случае, когда вычислительные устройства реализуются как на стороне транспортного средства, так и наземной стороне, контроллер 4 транспортного средства и наземный контроллер 21 могут работать вместе.
[0032] Система помощи при парковке дополнительно включает в себя блок 5 отображения, который отображает результат определения посредством блока определения возможности подачи для водителя транспортного средства 2. Фиг. 1 иллюстрирует пример блока 5 отображения, установленного в транспортном средстве 2. Однако, блок 5 отображения не ограничивается этим. Блок отображения, установленный на наземной стороне, может отображать результат определения посредством блока определения возможности подачи для водителя транспортного средства 2.
[0033] [Способ помощи при парковке]
Способ помощи при парковке в первом варианте осуществления описывается со ссылкой на блок-схему последовательности операций на фиг. 7 и 8. Способ помощи при парковке в первом варианте осуществления выполняется с помощью системы помощи при парковке, иллюстрированной на фиг. 1.
[0034] На этапе S101 спаренные блоки (25a, 25b) измерения расстояния обнаруживают отраженный звук или свет и, тем самым, измеряют расстояния (hA, hB) до участка 31 выступа и участка 32 углубления одновременно. Блок определения позиции транспортного средства вычисляет разницу (Δh) между расстояниями (hA, hB) (этап S103), считывает глубину участка углубления или высоту участка выступа (h1), сохраненные в памяти в контроллере (этап S105), и сравнивает Δh с h1 (этап S107).
[0035] Когда Δh совпадает с h1 ("Да" на этапе S107), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится в пределах первой области (α)", и блок определения возможности подачи определяет, что "подача электрической мощности является возможной". Переходя к этапу S113, изображение, иллюстрированное в части (a) на фиг. 9, отображается вместе с сообщением "подача электрической мощности является возможной" в блоке 5 отображения, и блок определения возможности подачи предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S115). После этого обработка переходит к этапу S151 на фиг. 8.
[0036] Между тем, когда Δh не совпадает с h1 ("Нет" на этапе S107), блок определения позиции транспортного средства переходит к этапу S109, чтобы считывать глубину участка углубления или высоту участка выступа (h2), сохраненные в памяти в контроллере, и сравнивает Δh с h2 (этап S111).
[0037] Когда Δh совпадает h2 ("Да" на этапе S111), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится за пределами первой области (α) и в пределах второй области (α+β)", и блок определения возможности подачи определяет, что "подача электрической мощности может быть невозможной". Переходя к этапу S119, изображение, иллюстрированное в части (b) на фиг. 9, отображается вместе с сообщением "подача электрической мощности может быть невозможной" в блоке 5 отображения, и система помощи при парковке запрашивает пользователя (водителя транспортного средства 2), подавать ли электрическую мощность (S131).
[0038] Когда система помощи при парковке получает ответ от пользователя, допускающий возможность "пробной подачи электрической мощности" ("Да" на этапе S133), блок определения возможности подачи предоставляет возможность беспроводной системе подачи электрической мощности выполнять "пробную подачу электрической мощности" (этап S135). После этого обработка переходит к этапу S151 на фиг. 8. Между тем, когда система помощи при парковке получает ответ от пользователя, не допускающий возможность "пробной подачи электрической мощности" ("Нет" на этапе S133), блок определения возможности подачи отображает сообщение "необходимо повторное совмещение" в блоке 5 отображения (этап S137) и не предоставляет возможности беспроводной системе подачи электрической мощности выполнять "пробную подачу электрической мощности", поскольку разрешение пользователя не получено (этап S139). После этого обработка переходит к этапу S151 на фиг. 8.
[0039] Когда Δh не совпадает с h2 ("Нет" на этапе S111), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится за пределами второй области (α+β)", и блок определения возможности подачи определяет, что "подача электрической мощности невозможна". Переходя к этапу S141, сообщение "подача электрической мощности невозможна, необходимо повторное совмещение" отображается в блоке 5 отображения, и блок определения возможности подачи не предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S143). После этого обработка переходит к этапу S151 на фиг. 8.
[0040] Когда переключатель зажигания не выключен ("Нет" на этапе S151), представляется возможным определять, что парковка не завершена, и обработка, таким образом, возвращается к этапу S101 на фиг. 7. Когда переключатель зажигания выключен ("Да" на этапе S151), представляется возможным определять, что парковка завершена. Обработка, таким образом, переходит к этапу S153, и определяется, предоставлена ли возможность "пробной подачи электрической мощности" или подачи электрической мощности. Когда ни "пробная подача электрической мощности", ни подача электрической мощности не разрешена ("Нет" на этапе S153), беспроводная система подачи электрической мощности не начинает подачу электрической мощности (этап S157). Когда либо "пробная подача электрической мощности", либо подача электрической мощности разрешена ("Да" на этапе S153), беспроводная система подачи электрической мощности начинает подачу электрической мощности (этап S155). Когда ненормальность, такая как снижение эффективности подачи электрической мощности и протекание тока перегрузки возникает во время подачи электрической мощности ("Да" на этапе S159), сообщение "подача электрической мощности невозможна, необходимо повторное совмещение" отображается в блоке 5 отображения (S163), и беспроводная система подачи электрической мощности прекращает подачу электрической мощности (этап S165). Когда ненормальность не возникает во время подачи электрической мощности ("Нет" на этапе S159), беспроводная система подачи электрической мощности продолжает подачу электрической мощности (этап S161).
[0041] Описываются изображения, отображаемые в блоке 5 отображения. Части (a) и (b) на фиг. 9 иллюстрируют первую область (α) и вторую область (α+β), которые изменяются в зависимости от промежутка (Gap) и позиции (позиции CC центра катушки) блока 7 катушки на стороне транспортного средства относительно первой области (α) и второй области (α+β). Часть (a) на фиг. 9 иллюстрирует состояние, когда позиция CC центра катушки находится в пределах первой области (α), и часть (b) на фиг. 9 иллюстрирует состояние, когда позиция CC центра катушки находится за пределами первой области (α) и в пределах второй области (α+β).
[0042] Как описано выше, в первом варианте осуществления, могут быть получены следующие действия и результаты.
[0043] Блок определения позиции транспортного средства определяет позицию транспортного средства относительно каждой из первой области (α), в которой подача электрической мощности является возможной, когда промежуток между блоком 7 катушки на стороне транспортного средства и блоком 24 катушки наземной стороны является максимальным, и второй области (β), в которой подача электрической мощности является возможной, когда промежуток является минимальным. Блок определения возможности подачи определяет возможность подачи электрической мощности на основе результата определения посредством блока определения позиции транспортного средства, и блок отображения отображает результат определения посредством блока определения возможности подачи для пассажира транспортного средства. Это увеличивает допустимый диапазон подачи электрической мощности и улучшает удобство при парковке по сравнению с диапазоном и удобством в сравнительном примере, в котором только первая область (α) является целью определения. Например, когда блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится за пределами первой области (α) и в пределах второй области (α+β)", система 1 помощи при парковке отправляет определение того, выполнять ли подачу электрической мощности, пользователю (водителю транспортного средства 2), в то же время указывая, что подача электрической мощности может быть невозможной. Поскольку существует вероятность, что подача электрической мощности может выполняться, даже когда позиция транспортного средства находится за пределами первой области (α), это увеличивает допустимый диапазон подачи электрической мощности и улучшает удобство при парковке.
[0044] Когда позиция транспортного средства определяется как находящаяся за пределами первой области (α) и в пределах второй области (α+β), блок определения возможности подачи определяет, что состояние подачи электрической мощности может изменяться с возможного на невозможное в зависимости от изменения промежутка. Это предоставляет возможность определения возможной/невозможной подачи электрической мощности, подходящего для состояния транспортного средства.
[0045] Предоставление сочетания структур (α, β) с углублениями и выступами и блоков (25a, 25b) измерения расстояния на стороне транспортного средства и наземной стороне предоставляет возможность определения позиции транспортного средства относительно первой и второй областей.
[0046] (Второй вариант осуществления)
Во втором варианте осуществления промежуток между блоком 7 катушки на стороне транспортного средства и блоком 24 катушки наземной стороны измеряется во время помощи при парковке, и возможность подачи электрической мощности определяется на основе значения измерения промежутка. Кроме того, во втором варианте осуществления, определяется позиция транспортного средства относительно третьей области, в которой подача электрической мощности является возможной, когда промежуток находится между максимальным и минимальным, и возможность подачи электрической мощности определяется на основе результата этого определения и значения измерения промежутка.
[0047] Система помощи при парковке во втором варианте осуществления является системой в первом варианте осуществления, дополнительно включающей в себя измерительный датчик, выполненный с возможностью измерять промежуток. Однако, блоки (25a, 25b) измерения расстояния могут быть использованы в качестве измерительного датчика. Например, более короткое из измеренных значений блоков (25a, 25b) измерения расстояния может быть измерено в качестве значения измерения промежутка. Расстояние от блока (25a, 25b) измерения расстояния до участка 31 выступа может, таким образом, быть измерено в качестве промежутка между блоком 7 катушки на стороне транспортного средства и блоком 24 катушки наземной стороны.
[0048] Как иллюстрировано в схематичном виде на фиг. 10, в системе 1 помощи при парковке первая промежуточная область (α+γ1) и вторая промежуточная область (α+γ1+γ2) задаются заранее в качестве третьей области, в которой подача электрической мощности является возможной, когда промежуток находится между максимальным и минимальным. Как само собой разумеющееся, первая область (α) и вторая область (α+β) также задаются заранее. Первая промежуточная область (α+γ1) является областью с возможностью подачи электрической мощности в случае, когда промежуток равен Z1, а вторая промежуточная область (α+γ1+γ2) является областью с возможностью подачи электрической мощности в случае, когда промежуток равен Z2. Размеры межлежащих промежутков Z1 и Z2 находятся между максимальным значением (Zmax) и минимальным значением (Zmin), и Z1 больше Z2. Вторая промежуточная область (α+γ1+γ2) включает в себя всю первую промежуточную область (α+γ1). Фиг. 10 - это чертеж, на котором Z1, Z2, первая промежуточная область (α+γ1) и вторая промежуточная область (α+γ1+γ2) добавлены в схематичный вид на фиг. 4.
[0049] Блок определения позиции транспортного средства определяет позицию транспортного средства 2 относительно каждой из первой промежуточной области (α+γ1) и второй промежуточной области (α+γ1+γ2), в дополнение к первой области (α) и второй области (α+γ1+γ2+β). Затем блок определения возможности подачи определяет возможность подачи электрической мощности, на основе результата определения посредством блока определения позиции транспортного средства и значения измерения промежутка. В частности, когда позиция транспортного средства определяется как находящаяся за пределами первой области (α) и в пределах второй области (α+β), блок определения возможности подачи определяет возможность подачи электрической мощности, на основе значения измерения промежутка. Это предоставляет возможность определения возможной/невозможной подачи электрической мощности, подходящего для состояния транспортного средства. Допустимый диапазон подачи электрической мощности увеличивается, и удобство при парковке улучшается по сравнению с диапазоном и удобством в сравнительном примере, в котором только первая область (α) является целью определения.
[0050] Например, как иллюстрировано в части (a) на фиг. 11, система помощи при парковке включает в себя первую структуру α с углублениями и выступами, первую промежуточную структуру γ1 с углублениями и выступами, вторую промежуточную структуру γ2 с углублениями и выступами и вторую структуру β с углублениями и выступами. Первая структура α с углублениями и выступами формируется в области, которая соответствует первой области (α) и которая находится на первой стороне из наземной стороны и стороны транспортного средства. Первая промежуточная структура γ1 с углублениями и выступами формируется в области, которая соответствует области (γ1) в первой промежуточной области (α+γ1) за исключением первой области (α) и которая находится на первой стороне. Вторая промежуточная структура γ2 с углублениями и выступами формируется в области, которая соответствует области (γ2) во второй промежуточной области (α+γ1+γ2) за исключением первой промежуточной области (α+γ1) и которая находится на первой стороне. Вторая структура β с углублениями и выступами формируется в области, которая соответствует области (β) во второй области (α+γ1+γ2+β) за исключением второй промежуточной области (α+γ1+γ2) и которая находится на первой стороне. Когда структуры (α, γ1, γ2, β) с углублениями и выступами формируются в областях на стороне транспортного средства, как иллюстрировано на фиг. 1, структуры (α, γ1, γ2, β) с углублениями и выступами могут быть сформированы на нижней стороне крышки 11 катушки транспортного средства, расположенной рядом с нижней поверхностью блока 7 катушки на стороне транспортного средства. В качестве другого примера, структуры (α, γ1, γ2, β) с углублениями и выступами могут быть сформированы на верхней поверхности блока 24 катушки наземной стороны.
[0051] Первая область (α), первая промежуточная область (α+γ1), вторая промежуточная область (α+γ1+γ2) и вторая область (α+γ1+γ2+β), которые иллюстрируются в части (a) на фиг. 11, соответствуют областям, спроецированным на XY-плоскость на фиг. 5. Каждая из структур (α, γ1, γ2, β) с углублениями и выступами формируется посредством поочередного и повторяющегося расположения участков 31 выступов и участков 32 углублений в направлении Y-оси. Участки 31 выступов и участки 32 углублений протягиваются параллельно друг другу в направлении X-оси. Плоский образ участков 31 выступов и участков 32 углублений, таким образом, является рисунком в полоску.
[0052] Как иллюстрировано в частях (b) и (c) на фиг. 11, глубина участков углублений или высота участков выступов (h1, h2, h3, h4) изменяется между структурами (α, γ1, γ2, β) с углублениями и выступами. Кроме того, шаг (L2) является одинаковым между структурами (α, γ1, γ2, β) с углублениями и выступами. Другими словами, ширины (L2) участков 31 выступов и участков 32 углублений в направлении Y-оси являются одинаковыми во всех структурах (α, γ1, γ2, β) с углублениями и выступами.
[0053] Как иллюстрировано в части (c) на фиг. 11, система помощи при парковке дополнительно включает в себя, по меньшей мере, два блока (25a, 25b) измерения расстояния, которые располагаются с интервалом, равным шагу (L2) в структурах (α, γ1, γ2, β) с углублениями и выступами, на другой стороне из наземной стороны и стороны транспортного средства. Блоки (25a, 25b) измерения расстояния размещаются в направлении Y-оси и измеряют расстояние в Z-направлении. Соответственно, спаренные блоки (25a, 25b) измерения расстояния могут обнаруживать звук или свет, отражаемый участком 31 выступа и участком 32 углубления, соответственно, независимо от их позиции относительно структур (α, γ1, γ2, β) с углублениями и выступами. Следовательно, блоки (25a, 25b) измерения расстояния могут измерять расстояния (hA, hB) до участка 31 выступа и участка 32 углубления одновременно.
[0054] Система помощи при парковке (блок определения позиции транспортного средства) может определять позицию транспортного средства 2 относительно блока 24 катушки наземной стороны, сравнивая разницу (Δh) между расстояниями (hA, hB), измеренными соответственно посредством двух блоков (25a, 25b) измерения расстояния, с глубиной участков углублений или высотой участков выступов (h1, h2, h3, h4). Другими словами, система помощи при парковке может определять позицию транспортного средства 2 относительно каждой из первой области (α), первой промежуточной области (α+γ1), второй промежуточной области (α+γ1+γ2) и второй промежуточной области (α+γ1+γ2+β).
[0055] Например, блок определения позиции транспортного средства определяет, в какое одно из следующих пяти состояний попадает позиция транспортного средства.
(1) В пределах первой области (α)
(2) За пределами первой области (α) и в пределах первой промежуточной области (α+γ1)
(3) За пределами первой промежуточной области (α+γ1) и в пределах второй промежуточной области (α+γ1+γ2)
(4) За пределами второй промежуточной области (α+γ1+γ2) и в пределах второй области (α+γ1+γ2+β)
(5) За пределами второй области (α+γ1+γ2+β)
[0056] Способ помощи при парковке во втором варианте осуществления описывается со ссылкой на блок-схему последовательности операций на фиг. 12-14. Способ помощи при парковке во втором варианте осуществления выполняется с помощью системы помощи при парковке, иллюстрированной на фиг. 1.
[0057] На этапе S01 спаренные блоки (25a, 25b) измерения расстояния обнаруживают отраженный звук или свет и, тем самым, измеряют расстояния (hA, hB) до участка 31 выступа и участка 32 углубления одновременно. Блок определения позиции транспортного средства вычисляет разницу (Δh) между расстояниями (hA, hB) (этап S03), считывает глубину участка углубления или высоту участка выступа (h1), сохраненные в памяти в контроллере (этап S05), и сравнивает Δh с h1 (этап S07).
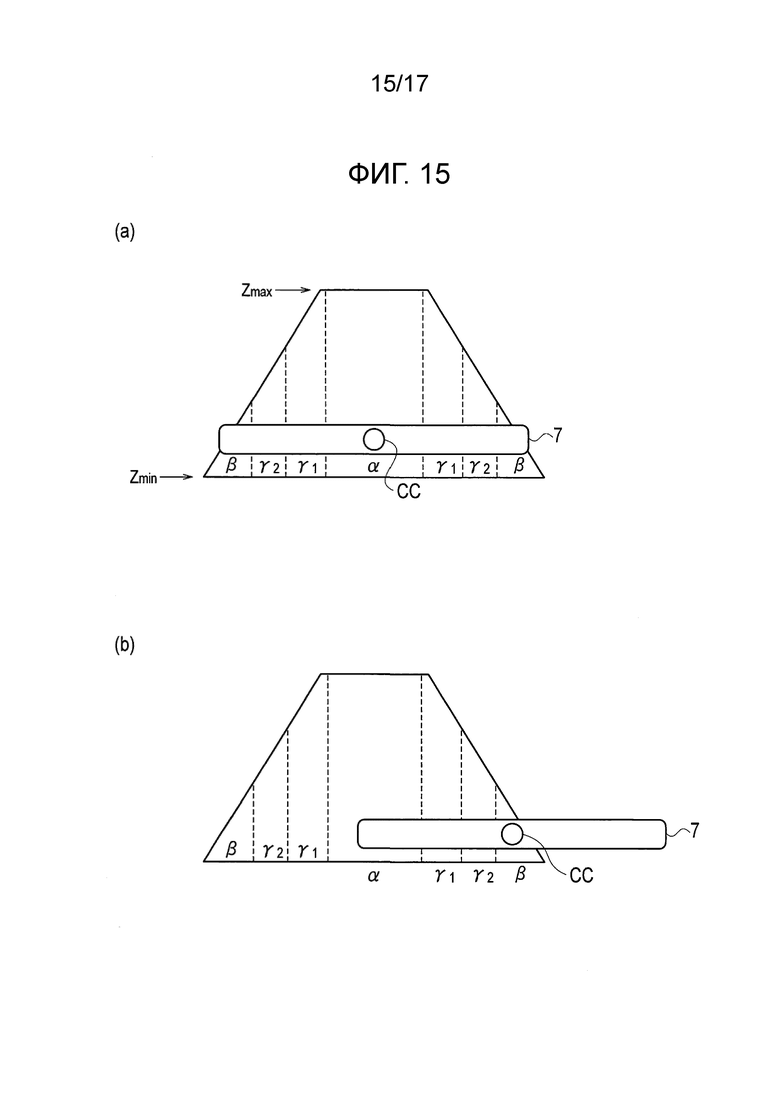
[0058] Когда Δh совпадает с h1 ("Да" на этапе S07), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится в пределах первой области (α)", и блок определения возможности подачи определяет, что "подача электрической мощности является возможной". Переходя к этапу S13, изображение, иллюстрированное в части (a) на фиг. 15, отображается вместе с сообщением "подача электрической мощности является возможной" в блоке 5 отображения, и блок определения возможности подачи предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S15). После этого обработка переходит к этапу S89 на фиг. 13.
[0059] Между тем, когда Δh не совпадает с h1 ("Нет" на этапе S07), блок определения позиции транспортного средства переходит к этапу S09, чтобы считывать глубину участка углубления или высоту участка выступа (h2), сохраненные в памяти в контроллере, и сравнивает Δh с h2 (этап S11).
[0060] Когда Δh совпадает с h2 ("Да" на этапе S11), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится за пределами первой области (α) и в пределах первой промежуточной области (α+γ1)". Блок определения позиции транспортного средства переходит к этапу S17, чтобы считывать промежуток (Z1) в первой промежуточной области (α+γ1), и сравнивает Z1 с расстоянием hA (этап S19).
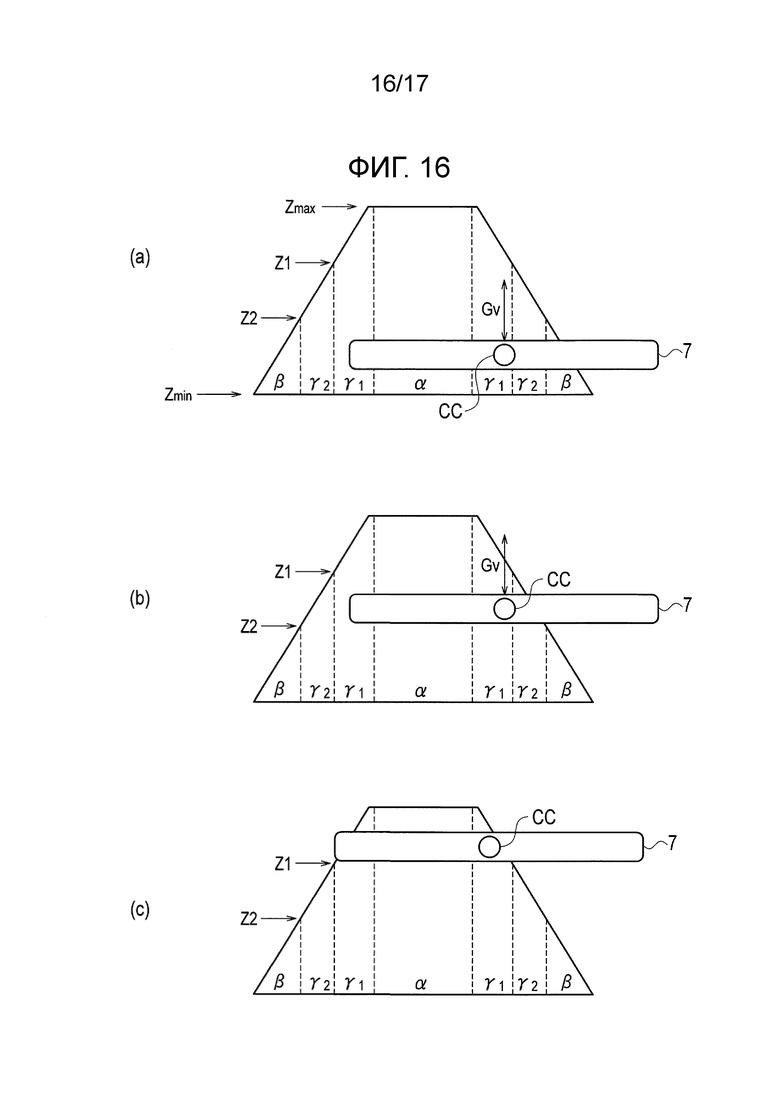
[0061] Когда расстояние hA меньше Z1 ("Да" на этапе S19), блок определения позиции транспортного средства считывает предварительно заданный диапазон (Gv) изменения промежутка из памяти (этап S21) и сравнивает Z1 со значением, полученным сложением диапазона (Gv) изменения промежутка с расстоянием hA (этап S23). Когда значение, полученное сложением диапазона (Gv) изменения промежутка с расстоянием hA, меньше Z1 ("Да" на этапе S23), блок определения возможности подачи определяет, что "подача электрической мощности является возможной". Переходя к этапу S25, изображение, иллюстрированное в части (a) на фиг. 16, отображается вместе с сообщением "подача электрической мощности является возможной" в блоке 5 отображения, и блок определения возможности подачи предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S27). После этого обработка переходит к этапу S89 на фиг. 13. Диапазон (Gv) изменения промежутка является величиной изменения в промежутке, которая изменяется в зависимости от посадки и высадки пассажиров и погрузки и разгрузки багажа. Первоначальное значение диапазона изменения промежутка задается в максимальный диапазон изменения (например, 20 мм), но может быть скорректирован в зависимости от количества грузов и числа пассажиров, введенного водителем.
[0062] Когда значение, полученное сложением диапазона (Gv) изменения промежутка с расстоянием hA, равно или больше Z1 ("Нет" на этапе S23), блок определения возможности подачи определяет, что "подача электрической мощности может быть невозможной". Переходя к этапу S29, изображение, иллюстрированное в части (b) на фиг. 16, отображается вместе с сообщением "подача электрической мощности может быть невозможной после высадки" в блоке 5 отображения, и система помощи при парковке запрашивает пользователя (водителя транспортного средства 2), подавать ли электрическую мощность (S31).
[0063] Когда система помощи при парковке получает ответ от пользователя, допускающий возможность "пробной подачи электрической мощности" ("Да" на этапе S33), блок определения возможности подачи предоставляет возможность беспроводной системе подачи электрической мощности выполнять "пробную подачу электрической мощности" (этап S35). После этого обработка переходит к этапу S89 на фиг. 8. После этого обработка переходит к этапу S89 на фиг. 13. Между тем, когда система помощи при парковке получает ответ от пользователя, не допускающий возможность "пробной подачи электрической мощности" ("Нет" на этапе S33), блок определения возможности подачи отображает сообщение "необходимо повторное совмещение" в блоке 5 отображения (этап S37) и не предоставляет возможность беспроводной системе подачи электрической мощности выполнять "пробную подачу электрической мощности", поскольку разрешение пользователя не получено (этап S39). После этого обработка переходит к этапу S89 на фиг. 13.
[0064] Между тем, когда расстояние hA равно или больше Z1 ("Нет" на этапе S19), блок определения возможности подачи определяет, что "подача электрической мощности невозможна". Переходя к этапу S41, изображение, иллюстрированное в части (c) на фиг. 16, отображается вместе с сообщением "подача электрической мощности невозможна, необходимо повторное совмещение" в блоке 5 отображения, и блок определения возможности подачи не предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S43). После этого обработка переходит к этапу S89 на фиг. 13.
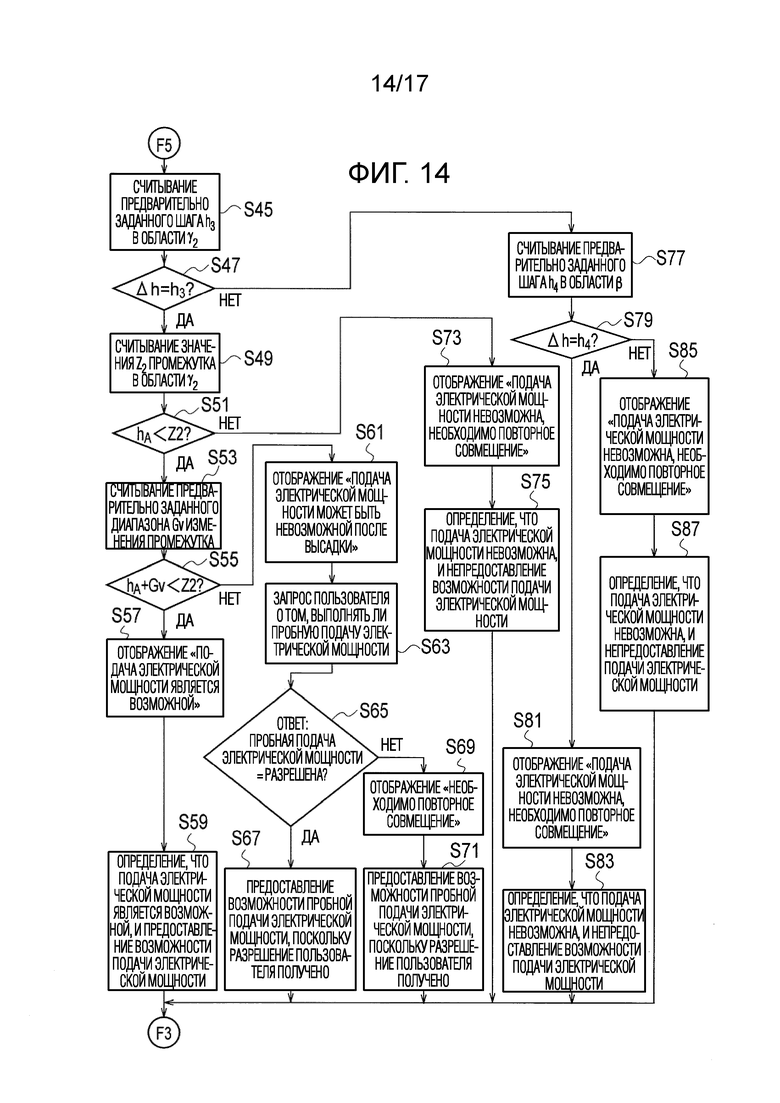
[0065] Возвращаясь к этапу S11, когда Δh не совпадает с h2 ("Нет" на этапе S11), блок определения позиции транспортного средства переходит к этапу S45, чтобы считывать глубину участка углубления или высоту участка выступа (h3) из памяти, и сравнивает Δh с h3 (этап S47).
[0066] Когда Δh совпадает с h3 ("Да" на этапе S47), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится за пределами первой промежуточной области (α+γ1) и в пределах второй промежуточной области (α+γ1+γ2)". Блок определения позиции транспортного средства переходит к этапу S49, чтобы считывать промежуток (Z2) во второй промежуточной области (α+γ1+γ2), и сравнивает Z2 с расстоянием hA (этап S51).
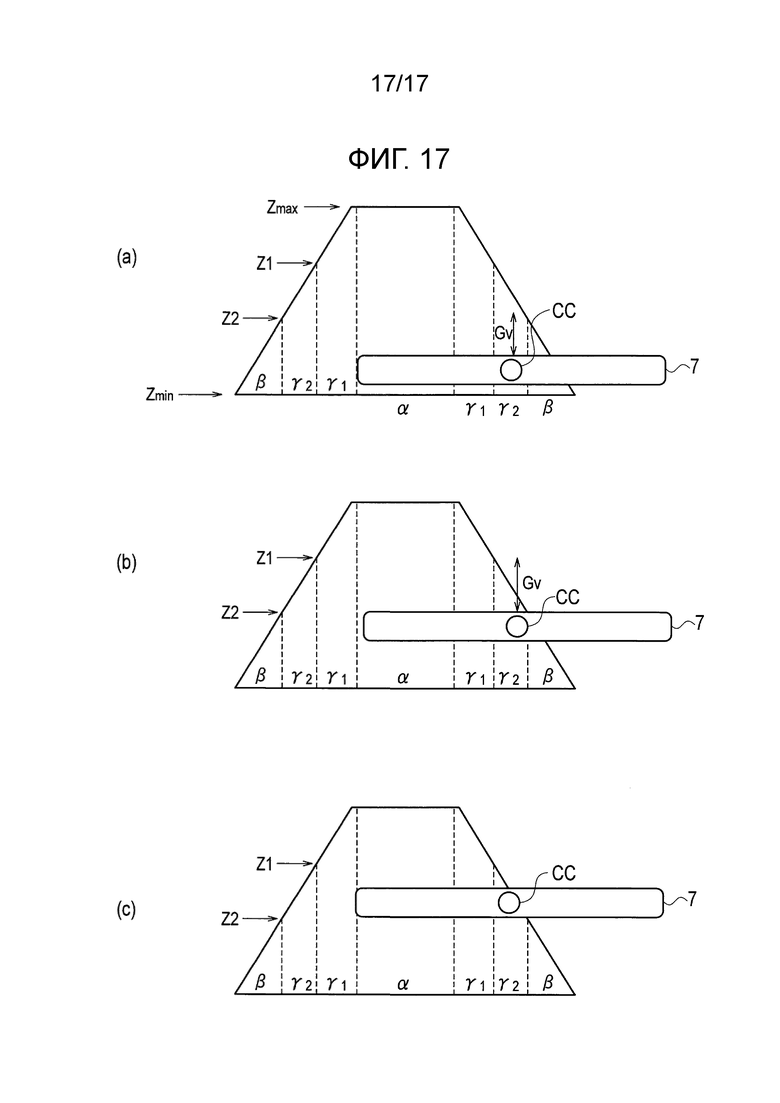
[0067] Когда расстояние hA меньше Z2 ("Да" на этапе S51), блок определения позиции транспортного средства считывает предварительно заданный диапазон (Gv) изменения промежутка из памяти (этап S53) и сравнивает Z2 со значением, полученным сложением диапазона (Gv) изменения промежутка с расстоянием hA (этап S55). Когда значение, полученное сложением диапазона (Gv) изменения промежутка с расстоянием hA, меньше Z2 ("Да" на этапе S55), блок определения возможности подачи определяет, что "подача электрической мощности является возможной". Переходя к этапу S57, изображение, иллюстрированное в части (a) на фиг. 17, отображается вместе с сообщением "подача электрической мощности является возможной" в блоке 5 отображения, и блок определения возможности подачи предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S59). После этого обработка переходит к этапу S89 на фиг. 13.
[0068] Когда значение, полученное сложением диапазона (Gv) изменения промежутка с расстоянием hA, равно или больше Z2 ("Нет" на этапе S55), блок определения возможности подачи определяет, что "подача электрической мощности может быть невозможной". Переходя к этапу S61, изображение, иллюстрированное в части (b) на фиг. 17, отображается вместе с сообщением "подача электрической мощности может быть невозможной после высадки" в блоке 5 отображения, и система помощи при парковке запрашивает пользователя (водителя транспортного средства 2), подавать ли электрическую мощность (этап S63).
[0069] Когда система помощи при парковке получает ответ от пользователя, допускающий возможность "пробной подачи электрической мощности" ("Да" на этапе S65), блок определения возможности подачи предоставляет возможность беспроводной системе подачи электрической мощности выполнять "пробную подачу электрической мощности" (этап S67). После этого обработка переходит к этапу S89 на фиг. 13. Между тем, когда система помощи при парковке получает ответ от пользователя, не допускающий возможность "пробной подачи электрической мощности" ("Нет" на этапе S65), блок определения возможности подачи отображает сообщение "необходимо повторное совмещение" в блоке 5 отображения (этап S69) и не предоставляет возможности беспроводной системе подачи электрической мощности выполнять "пробную подачу электрической мощности", поскольку разрешение пользователя не получено (этап S71). После этого обработка переходит к этапу S89 на фиг. 13.
[0070] Между тем, когда расстояние hA равно или больше Z2 ("Нет" на этапе S51), блок определения возможности подачи определяет, что "подача электрической мощности невозможна". Переходя к этапу S73, изображение, иллюстрированное в части (c) на фиг. 17, отображается вместе с сообщением "подача электрической мощности невозможна, необходимо повторное совмещение" в блоке 5 отображения, и блок определения возможности подачи не предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S75). После этого обработка переходит к этапу S89 на фиг. 13.
[0071] Возвращаясь к этапу S47, когда Δh не совпадает с h3 ("Нет" на этапе S47), блок определения позиции транспортного средства переходит к этапу S77, чтобы считывать глубину участка углубления или высоту участка выступа (h4) из памяти, и сравнивает Δh с h4 (этап S79).
[0072] Когда Δh совпадает с h4 ("Да" на этапе S79), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится за пределами второй промежуточной области (α+γ1+γ2) и в пределах второй области (α+γ1+γ2+β)". Переходя к этапу S81, изображение, иллюстрированное в части (b) на фиг. 15, отображается вместе с сообщением "подача электрической мощности невозможна, необходимо повторное совмещение" в блоке 5 отображения, и блок определения возможности подачи не предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S83). После этого обработка переходит к этапу S89 на фиг. 13.
[0073] Между тем, когда Δh не совпадает с h4 ("Нет" на этапе S79), блок определения позиции транспортного средства определяет, что "позиция транспортного средства находится за пределами второй области (α+γ1+γ2+β)". Переходя к этапу S85, сообщение "подача электрической мощности невозможна, необходимо повторное совмещение" отображается в блоке 5 отображения, и блок определения возможности подачи не предоставляет возможность беспроводной системе подачи электрической мощности подавать электрическую мощность (S87). После этого обработка переходит к этапу S89 на фиг. 13.
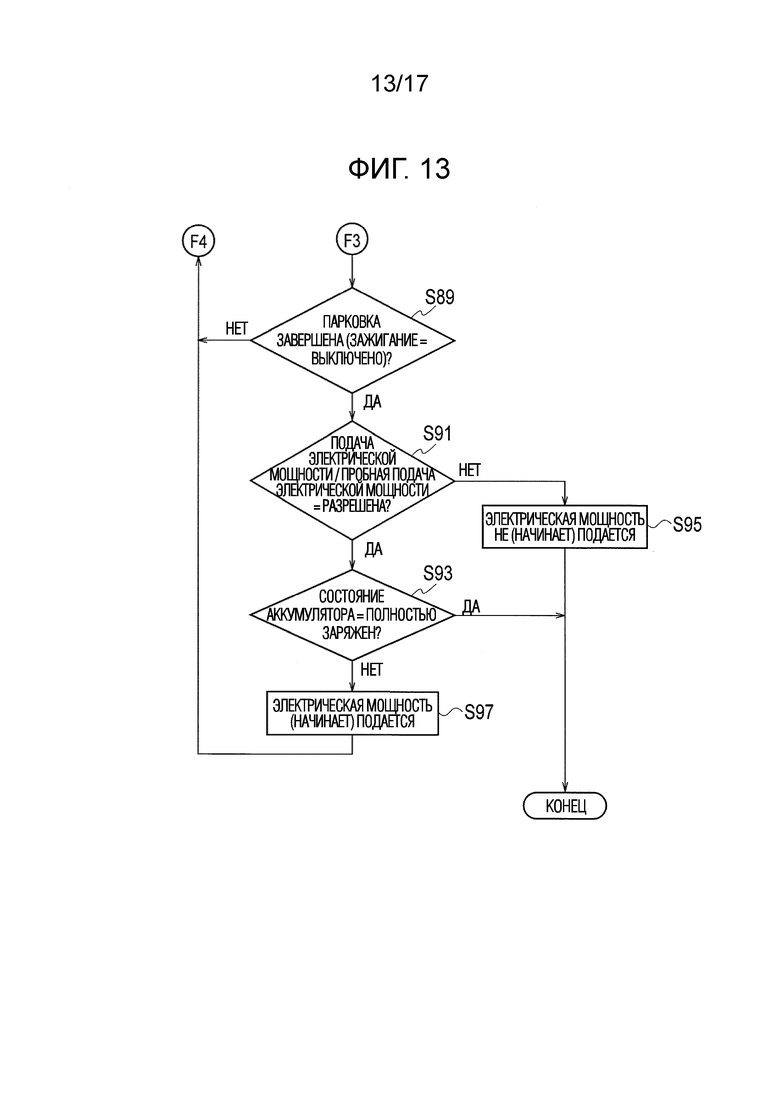
[0074] Когда переключатель зажигания не выключен на этапе S89 ("Нет" на этапе S89), представляется возможным определять, что парковка не завершена, и обработка, таким образом, возвращается к этапу S01 на фиг. 12. Когда переключатель зажигания выключен ("Да" на этапе S89), представляется возможным определять, что парковка завершена, и обработка, таким образом, переходит к этапу S91, и определяется, разрешена ли "пробная подача электрической мощности" или подача электрической мощности. Когда ни "пробная подача электрической мощности", ни подача электрической мощности не разрешена ("Нет" на этапе S91), беспроводная система подачи электрической мощности не начинает подачу электрической мощности (этап S95). Когда либо "пробная подача электрической мощности", либо подача электрической мощности разрешена ("Да" на этапе S91), беспроводная система подачи электрической мощности начинает подачу электрической мощности (этап S97), при условии, что состояние заряда (SOC) не полное ("Нет" на этапе S93). Когда состояние заряда полное ("Да" на этапе S93), беспроводная система подачи электрической мощности не начинает подачу электрической мощности (этап S95).
[0075] Как описано выше, во втором варианте осуществления, могут быть получены следующие действия и результаты.
[0076] Когда позиция транспортного средства определяется как находящаяся за пределами первой области (α) и в пределах второй области (α+γ1+γ2+β), блок определения возможности подачи определяет возможность подачи электрической мощности на основе значения измерения промежутка, измеренного посредством блоков (25a, 25b) измерения расстояния. Это предоставляет возможность соответствующего определения возможной/невозможной подачи электрической мощности в зависимости от значения измерения промежутка.
[0077] Блок определения позиции транспортного средства определяет позицию транспортного средства 2 относительно третьей области (γ1, γ2), в которой подача электрической мощности является возможной, когда промежуток является межлежащим промежутком (Z1, Z2) между максимальным и минимальным. Блок определения возможности подачи определяет возможность подачи электрической мощности, на основе результата определения посредством блока определения позиции транспортного средства и значения измерения промежутка. Это предоставляет возможность соответствующего и подробного определения возможной/невозможной подачи электрической мощности в зависимости от значения измерения промежутка.
[0078] Блок определения возможности подачи определяет, что подача электрической мощности является возможной, когда позиция транспортного средства 2 определяется как находящаяся в пределах третьей области (γ1, γ2), и значение, полученное сложением диапазона (Gv) изменения промежутка со значением измерения промежутка, меньше межлежащего промежутка (Z1, Z2). Возможность подачи электрической мощности может быть определена, принимая во внимание диапазон (Gv) изменения промежутка, связанный с посадкой и высадкой. Это предоставляет возможность соответствующего и подробного определения возможной/невозможной подачи электрической мощности в зависимости от значения измерения промежутка.
[0079] Хотя содержимое настоящего изобретения описано выше с помощью вариантов осуществления, настоящее изобретение не ограничивается вышеприведенным описанием. Специалистам в данной области техники очевидно, что возможны различные изменения и модификации.
Список ссылочных обозначений
[0080] 1 система помощи при парковке
2 транспортное средство
4 контроллер транспортного средства (блок определения позиции транспортного средства, блок определения возможности подачи)
5 блок отображения
7 блок катушки на стороне транспортного средства
21 наземный контроллер (блок определения позиции транспортного средства, блок определения возможности подачи)
24 блок катушки наземной стороны
25a, 25b блоки измерения расстояния
Gv диапазон изменения промежутка
L1, L2 шаг
Z1, Z2 межлежащий промежуток
α первая структура с углублениями и выступами
β вторая структура с углублениями и выступами
γ1 первая промежуточная структура с углублениями и выступами
γ2 вторая промежуточная структура с углублениями и выступами
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ И СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2719089C1 |
| УСТРОЙСВО ПОМОЩИ ПРИ ПАРКОВКЕ И СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2643317C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2652678C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2719085C1 |
| СИСТЕМА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2672507C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2714656C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ ДЛЯ УСТРОЙСТВА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734643C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2707409C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ И СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2668786C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
Изобретение относится к системам помощи при парковке. Система помощи при парковке, используемая в беспроводной системе зарядки, которая выполняет беспроводную зарядку транспортного средства. Система помощи при парковке содержит блок определения позиции транспортного средства, блок определения возможности зарядки, блок отображения и измерительный датчик. Когда позиция транспортного средства определяется как находящаяся за пределами первой области и в пределах второй области, блок определения возможности зарядки определяет возможность подачи электрической мощности на основе значения измерения промежутка, измеренного посредством измерительного датчика. Достигается повышение безопасности управления транспортным средством. 5 з.п. ф-лы, 35 ил.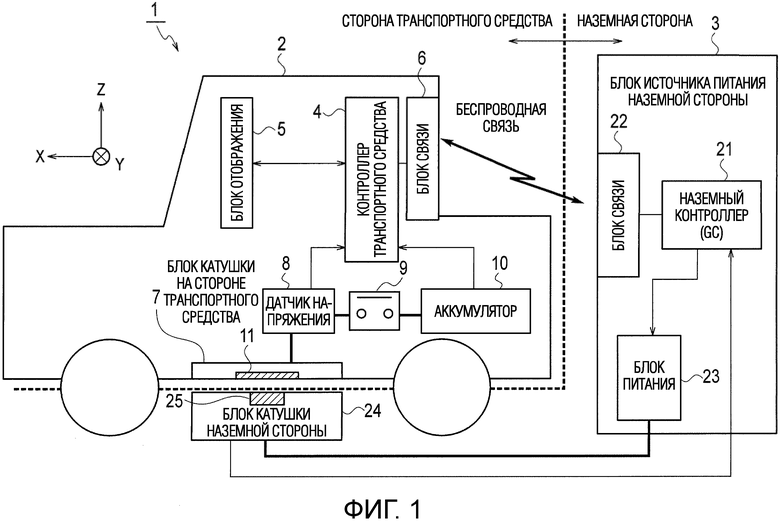
1. Система (1) помощи при парковке, используемая в беспроводной системе подачи электрической мощности, которая выполняет беспроводную подачу электрической мощности между блоком (24) катушки наземной стороны и блоком (7) катушки на стороне транспортного средства, система (1) помощи при парковке содержит:
блок (4, 21) определения позиции транспортного средства, выполненный с возможностью определять позицию транспортного средства (2) относительно каждой из первой области, в которой подача электрической мощности является возможной, когда промежуток между блоком (7) катушки на стороне транспортного средства и блоком (24) катушки наземной стороны является максимальным (Zmax), и второй области, в которой подача электрической мощности является возможной, когда промежуток является минимальным (Zmin);
блок (4, 21) определения возможности подачи, выполненный с возможностью определять возможность подачи электрической мощности на основе результата определения посредством блока (4, 21) определения позиции транспортного средства;
блок (5) отображения, выполненный с возможностью отображать результат определения посредством блока (4, 21) определения возможности подачи для водителя транспортного средства (2); и
измерительный датчик (25a, 25b), выполненный с возможностью измерять промежуток, при этом
когда позиция транспортного средства (2) определяется как находящаяся за пределами первой области и в пределах второй области, блок (4, 21) определения возможности подачи определяет возможность подачи электрической мощности на основе значения измерения промежутка, измеренного посредством измерительного датчика (25a, 25b).
2. Система (1) помощи при парковке по п. 1, в которой
блок (4, 21) определения позиции транспортного средства определяет позицию транспортного средства (2) относительно третьей области, в которой подача электрической мощности является возможной, когда промежуток является межлежащим промежутком (Z1, Z2) между максимальным (Zmax) и минимальным (Zmin), и
блок (4, 21) определения возможности подачи определяет возможность подачи электрической мощности на основе значения измерения промежутка и результата определения посредством блока (4, 21) определения позиции транспортного средства.
3. Система (1) помощи при парковке по п. 2, в которой блок (4, 21) определения возможности подачи определяет, что подача электрической мощности является возможной, когда позиция транспортного средства определяется как находящаяся в пределах третьей области, и значение, полученное сложением диапазона (Gv) изменения промежутка со значением измерения промежутка, меньше межлежащего промежутка (Z1, Z2).
4. Система (1) помощи при парковке по п. 1, в которой когда позиция транспортного средства (2) определяется как находящаяся за пределами первой области и в пределах второй области, блок (4, 21) определения возможности подачи определяет, что существует возможность состояния подачи электрической мощности, изменяющегося с возможного на невозможное вследствие изменения промежутка.
5. Система (1) помощи при парковке по любому из пп. 1-4, дополнительно содержащая:
первую структуру (α) с углублениями и выступами, сформированную в области, которая соответствует первой области и которая находится на первой из наземной стороны и стороны транспортного средства;
вторую структуру (β) с углублениями и выступами, сформированную в области, которая соответствует области во второй области, за исключением первой области, и которая сформирована на первой из наземной стороны и стороны транспортного средства; и
два блока (25a, 25b) измерения расстояния, расположенных на другой стороне из наземной стороны и стороны транспортного средства, с интервалом, равным шагу в первой структуре (α) с углублениями и выступами и второй структуре (β) с углублениями и выступами, при этом
глубина (h1) участка углубления или высота (h1) участка выступа в первой структуре (α) с углублениями и выступами отличается от глубины (h2) или высоты (h2) во второй структуре (β) с углублениями и выступами, и шаг (L1) в первой структуре с углублениями и выступами является таким же, что и шаг (L1) во второй структуре (β) с углублениями и выступами, и
блок (4, 21) определения позиции транспортного средства определяет позицию транспортного средства (2), сравнивая разницу между расстояниями, измеренными соответственно посредством двух блоков (25a, 25b) измерения расстояния, и глубиной (h1, h2) участка углубления или высотой (h1, h2) участка выступа.
6. Способ помощи при парковке, используемый в беспроводной системе подачи электрической мощности, которая выполняет беспроводную подачу электрической мощности между блоком (24) катушки наземной стороны и блоком (7) катушки на стороне транспортного средства, содержащий этапы, на которых:
определяют позицию транспортного средства (2) относительно каждой из первой области, в которой подача электрической мощности является возможной, когда промежуток между блоком (7) катушки на стороне транспортного средства и блоком (24) катушки наземной стороны является максимальным (Zmax), и второй области, в которой подача электрической мощности является возможной, когда промежуток является минимальным (Zmin);
измеряют промежуток;
определяют возможность подачи электрической мощности на основе измеренного промежутка, когда позиция транспортного средства (2) определяется как находящаяся за пределами первой области и в пределах второй области; и
отображают результат определения по возможности подачи электрической мощности для водителя транспортного средства (2).
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| RU 2012138467 A, 20.04.2014. | |||

