Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке.
Уровень техники
[0002] Известен способ навигации на основе инструкций по автомобильной парковке, который включает в себя выполнение процесса распознавания сигнальных разметочных линий по данным изображения, полученных посредством бортовой камеры, формирующей изображение области парковки, и распознавание парковочной рамки на основе результата распознавания (см., например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2007-315956A
Сущность изобретения
Задачи, решаемые изобретением
[0004] В способе навигации на основе инструкций по автомобильной парковке, как описано в патентном документе 1, когда сигнальная разметочная линия, представляющая парковочную рамку, не может распознаваться по некоторым причинам, к примеру, что сигнальной разметочной линии не существует, или сигнальная разметочная линия является нечеткой, парковочная рамка не может распознаваться, и доступное пространство для парковки не может оцениваться.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ помощи при парковке и устройство помощи при парковке, с помощью которых доступное пространство для парковки может оцениваться независимо от того, может или нет распознаваться сигнальная разметочная линия, представляющая парковочную рамку.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством извлечения двух или более транспортных средств, припаркованных рядом, из информации распознавания относительно припаркованных транспортных средств, существующих на автомобильной парковке, группировки двух или более транспортных средств в набор транспортных средств и оценки доступного пространства для парковки между припаркованными транспортными средствами, включенными в набор транспортных средств.
Преимущества изобретения
[0007] Согласно настоящему изобретению, может получаться такое преимущество, что доступное пространство для парковки может оцениваться посредством использования результата группировки распознанного набора транспортных средств независимо от того, может или нет распознаваться сигнальная разметочная линия, представляющая парковочную рамку.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства помощи при парковке согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой для описания функций ECU помощи при парковке по фиг. 1.
Фиг. 3 является видом сверху для описания процесса распознавания для припаркованных транспортных средств согласно варианту осуществления настоящего изобретения.
Фиг. 4 является видом сверху для описания процесса вычисления для позиций и направлений припаркованных транспортных средств согласно варианту осуществления настоящего изобретения.
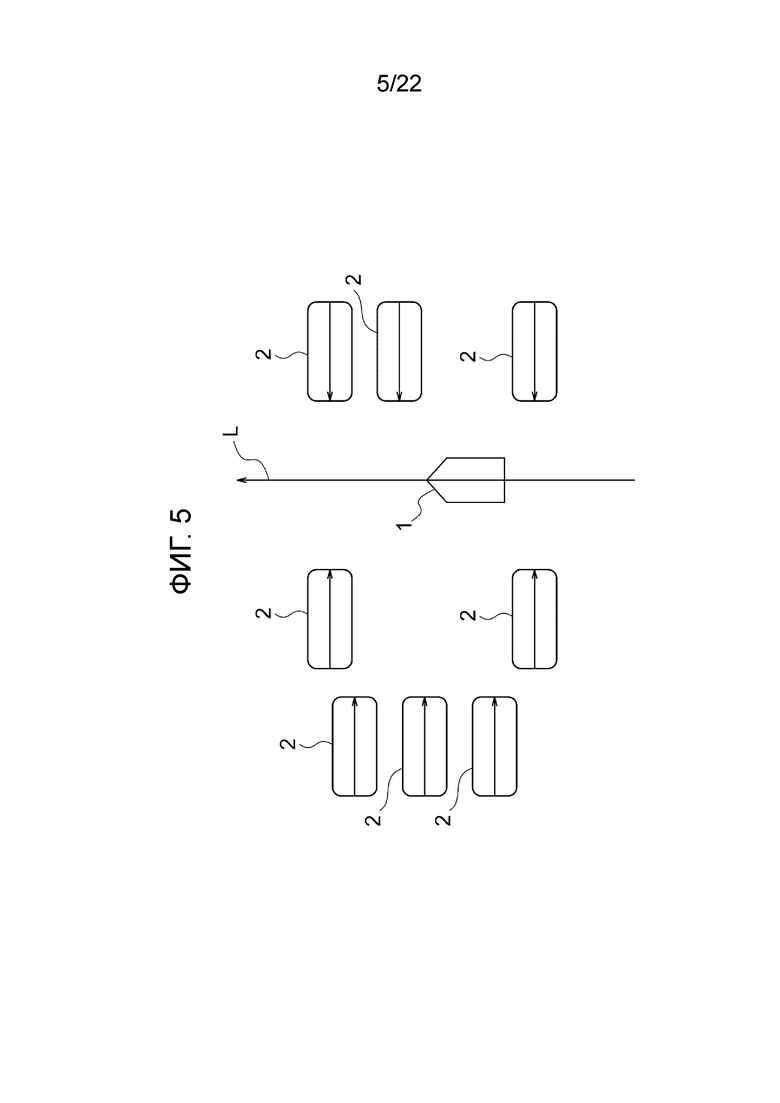
Фиг. 5 является видом сверху для описания процесса задания для опорной линии направления полосы для проезда согласно варианту осуществления настоящего изобретения.
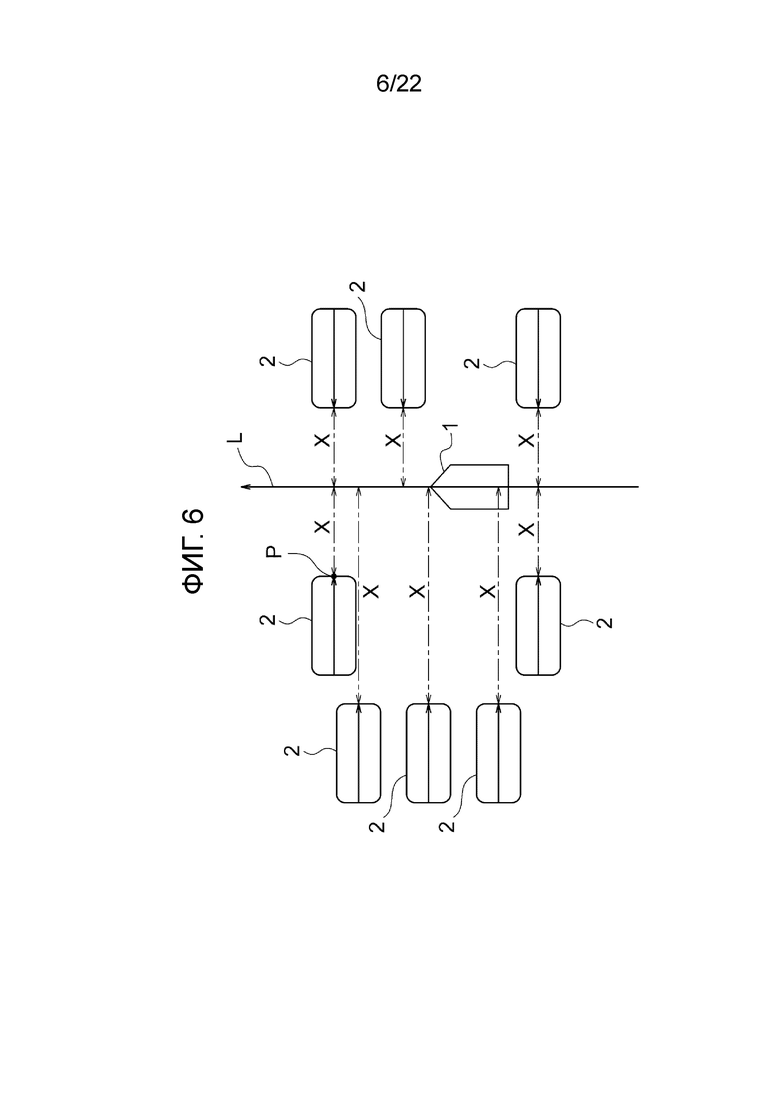
Фиг. 6 является видом сверху для описания процесса вычисления для опорных расстояний согласно варианту осуществления настоящего изобретения.
Фиг. 7 является видом сверху для описания процесса группировки для набора транспортных средств согласно варианту осуществления настоящего изобретения.
Фиг. 8 является видом сверху для описания процесса оценки для доступного пространства для парковки согласно варианту осуществления настоящего изобретения.
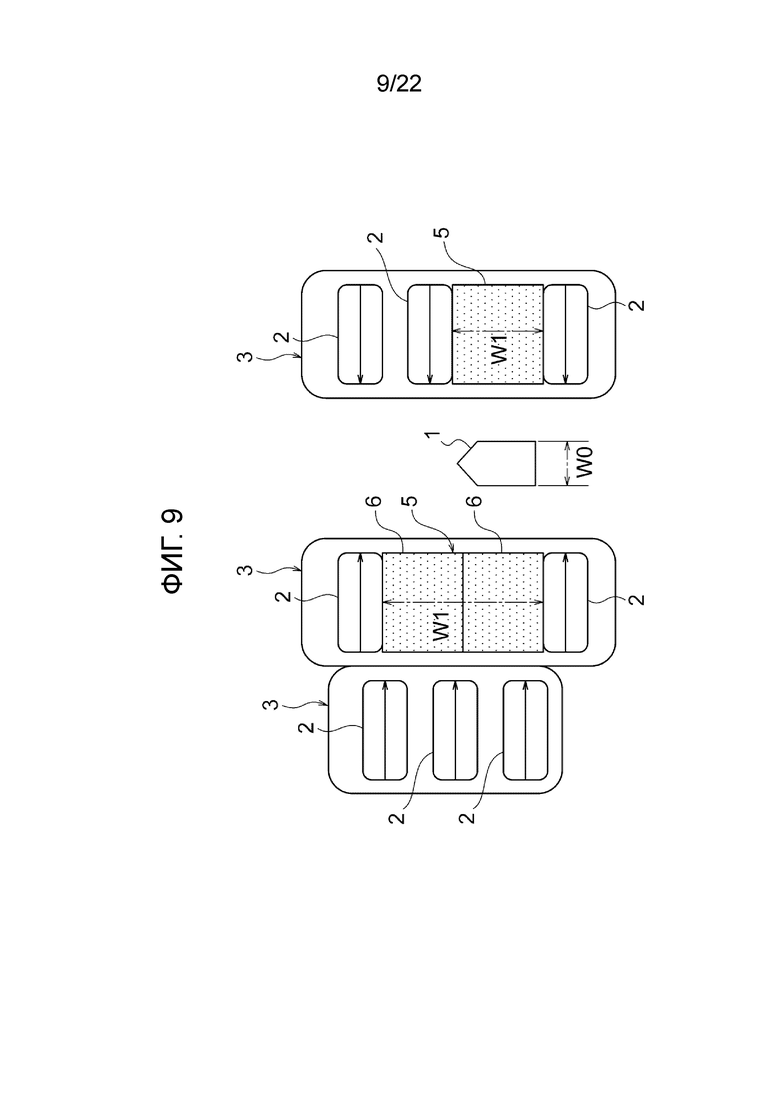
Фиг. 9 является видом сверху для описания процесса разделения для доступного пространства для парковки согласно варианту осуществления настоящего изобретения.
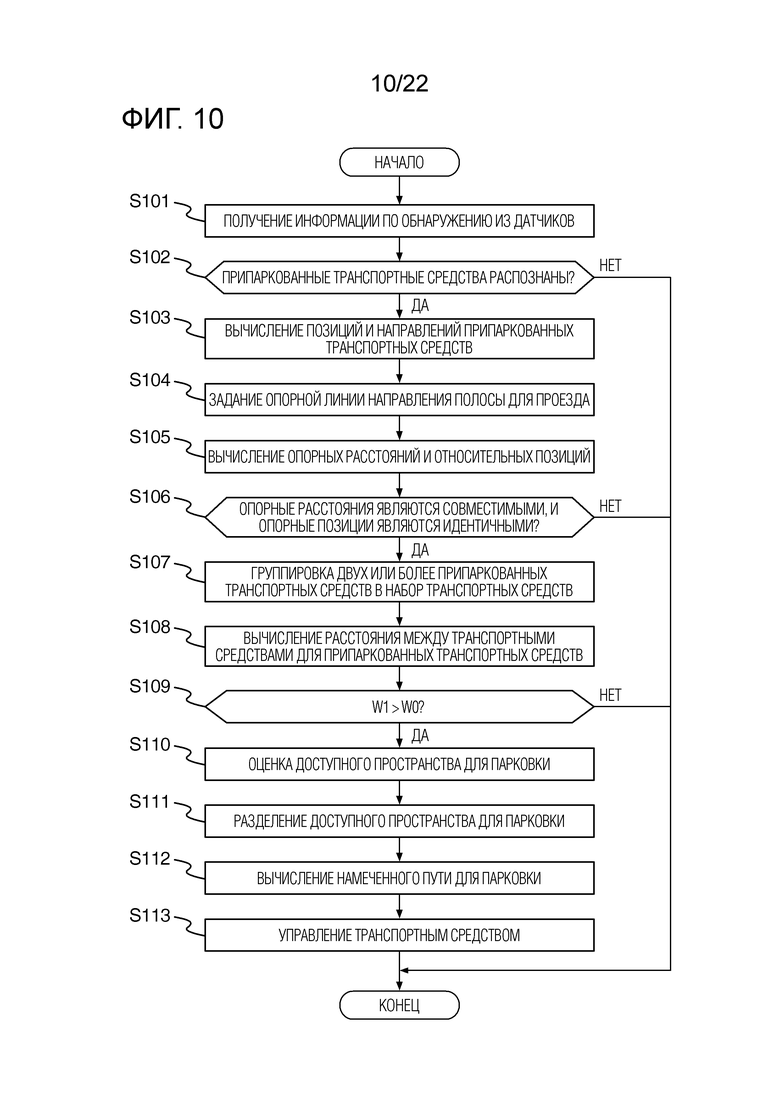
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления для процесса помощи при парковке, выполняемого посредством устройства помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
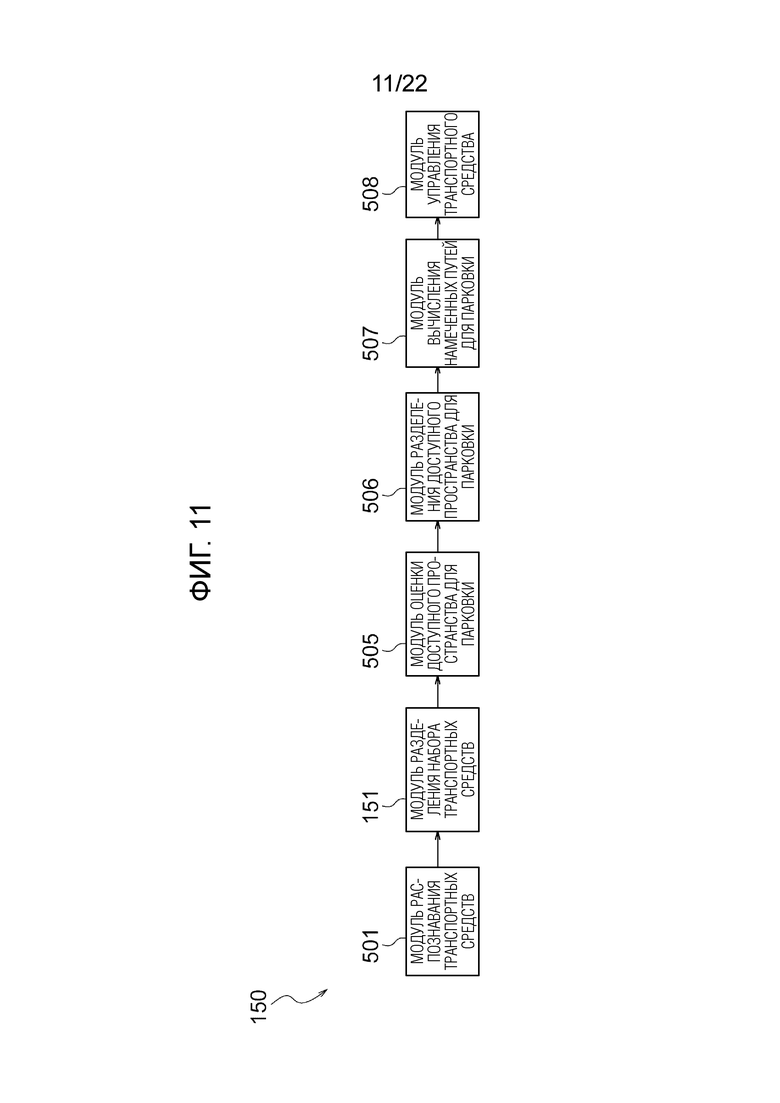
Фиг. 11 является блок-схемой для функций описания ECU помощи при парковке согласно другому варианту осуществления настоящего изобретения.
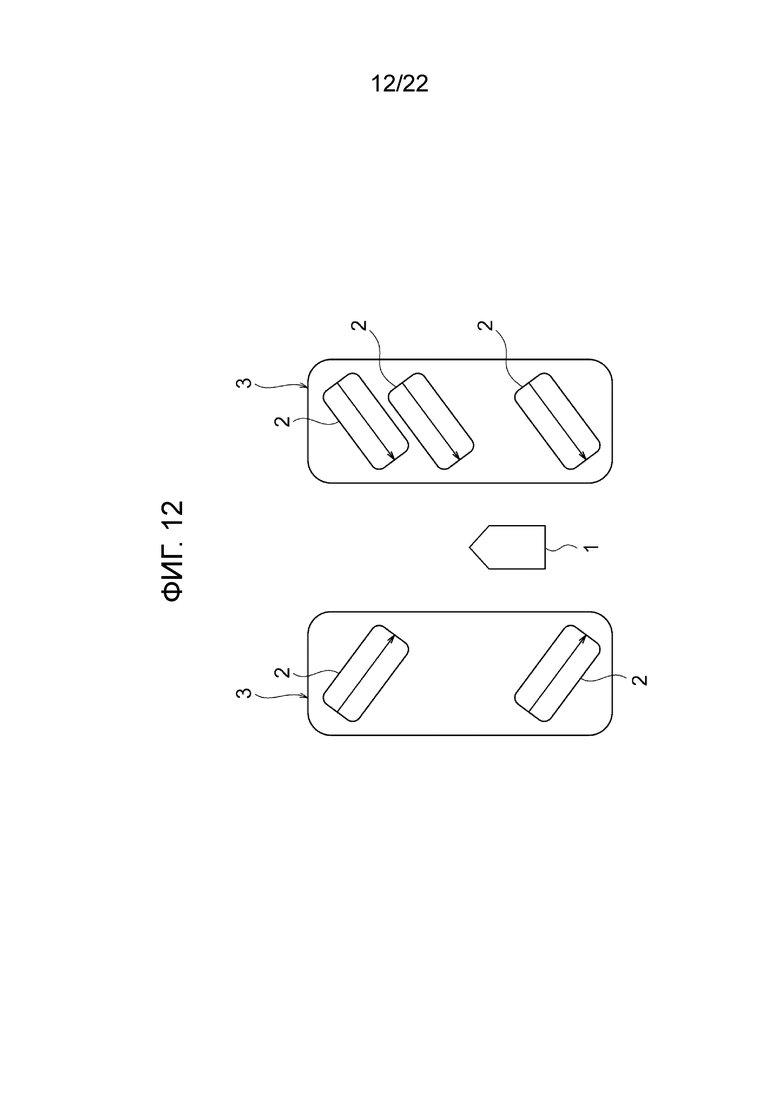
Фиг. 12 является видом сверху для описания процесса группировки для набора транспортных средств согласно другому варианту осуществления настоящего изобретения.
Фиг. 13 является видом сверху для описания процесса оценки для доступного пространства для парковки согласно другому варианту осуществления настоящего изобретения.
Фиг. 14 является видом сверху для описания процесса разделения для доступного пространства для парковки согласно другому варианту осуществления настоящего изобретения.
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления для процесса помощи при парковке согласно другому варианту осуществления настоящего изобретения.
Фиг. 16 является блок-схемой для функций описания ECU помощи при парковке согласно другому варианту осуществления настоящего изобретения.
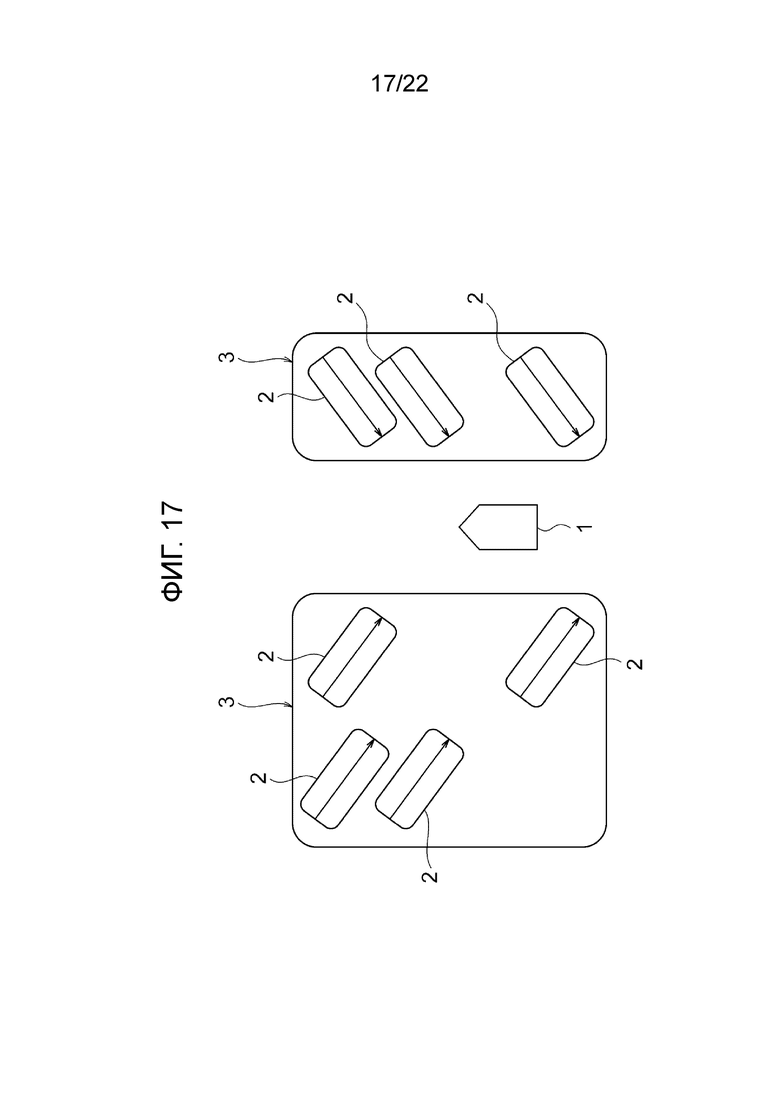
Фиг. 17 является видом сверху для описания процесса группировки для набора транспортных средств согласно другому варианту осуществления настоящего изобретения.
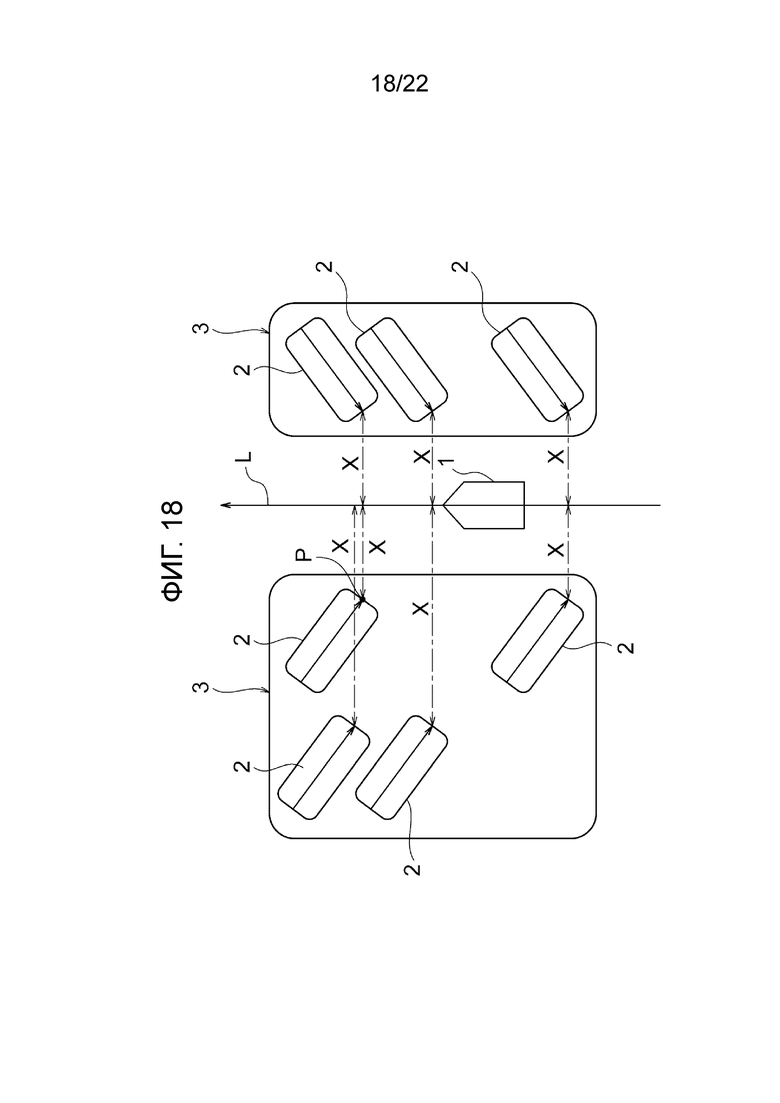
Фиг. 18 является видом сверху для описания процесса задания для опорной линии направления полосы для проезда и процесса вычисления для опорных расстояний X согласно другому варианту осуществления настоящего изобретения.
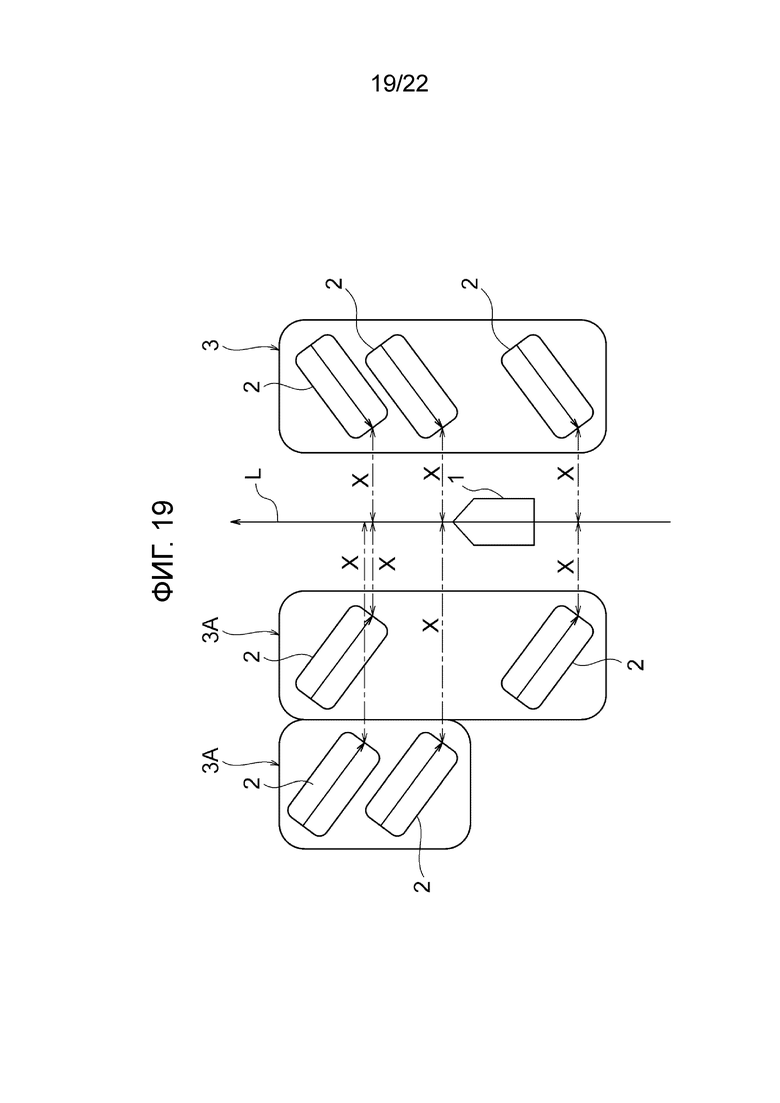
Фиг. 19 является видом сверху для описания процесса разделения для набора транспортных средств согласно другому варианту осуществления настоящего изобретения.
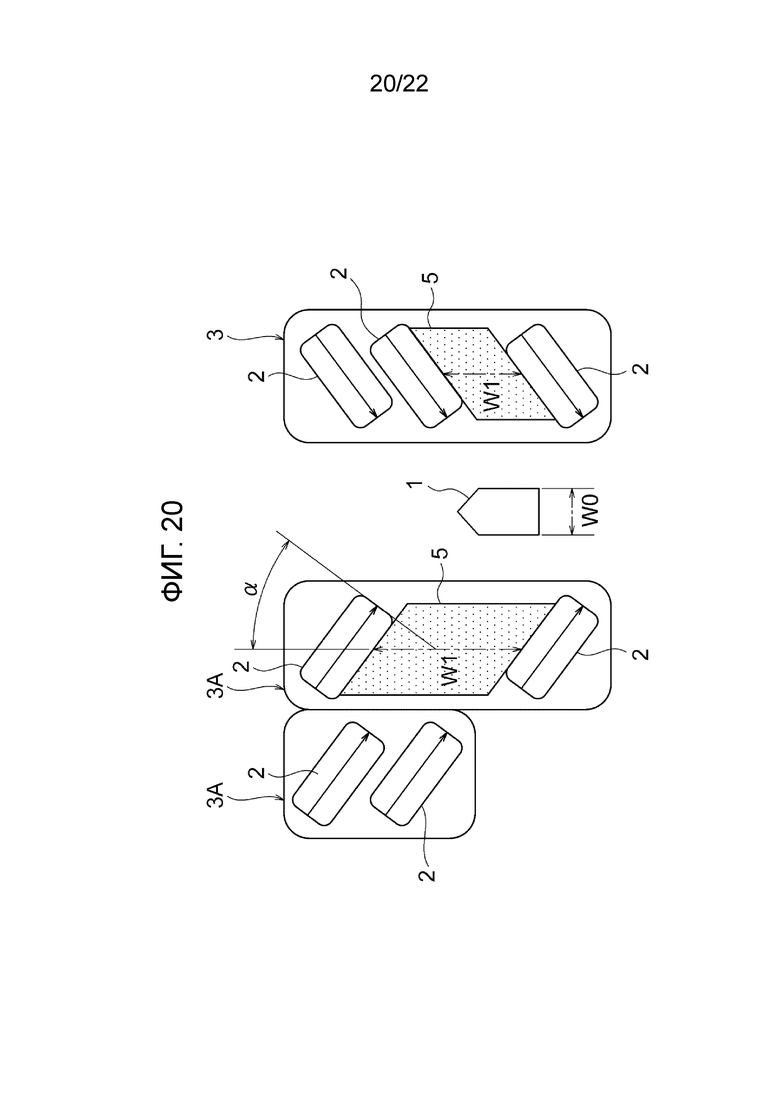
Фиг. 20 является видом сверху для описания процесса оценки для доступного пространства для парковки согласно другому варианту осуществления настоящего изобретения.
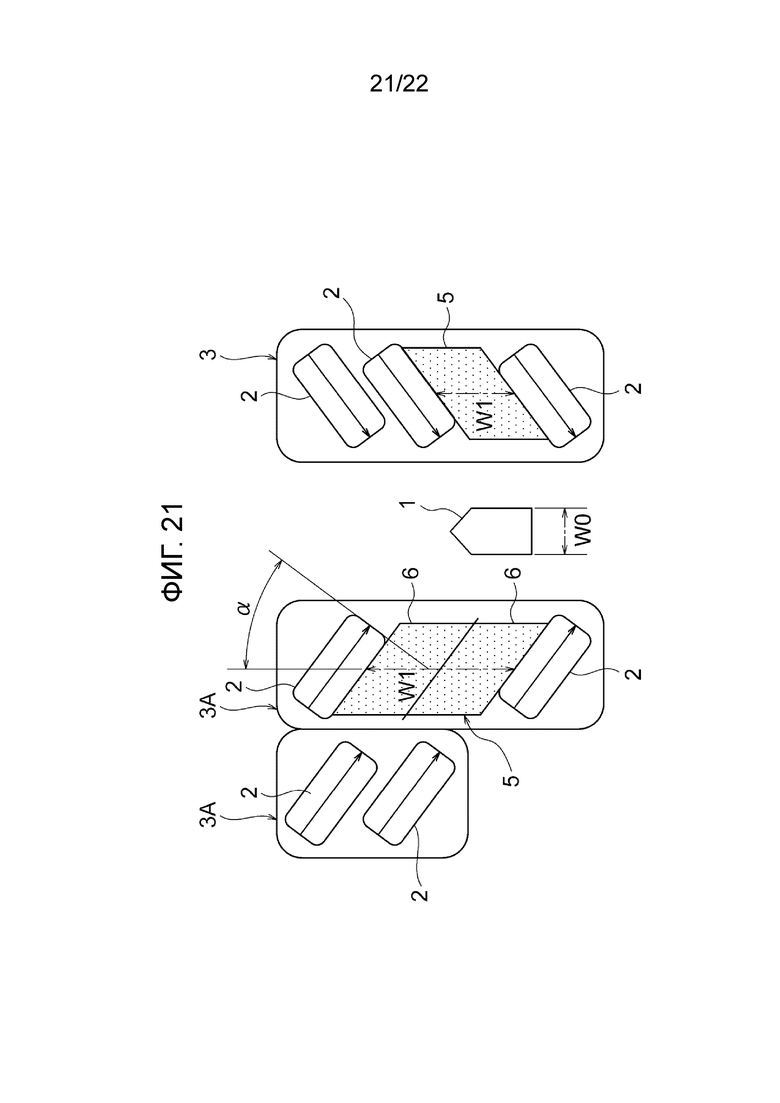
Фиг. 21 является видом сверху для описания процесса разделения для доступного пространства для парковки согласно другому варианту осуществления настоящего изобретения.
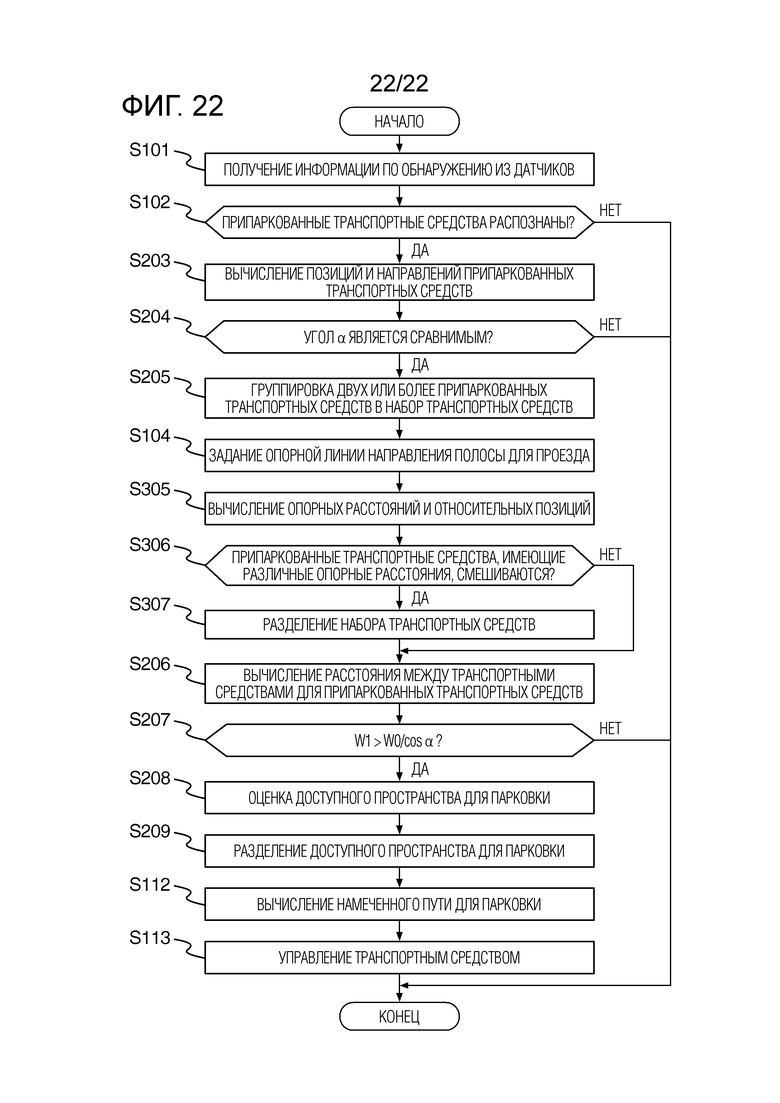
Фиг. 22 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления для процесса помощи при парковке согласно другому варианту осуществления настоящего изобретения.
Осуществление изобретения
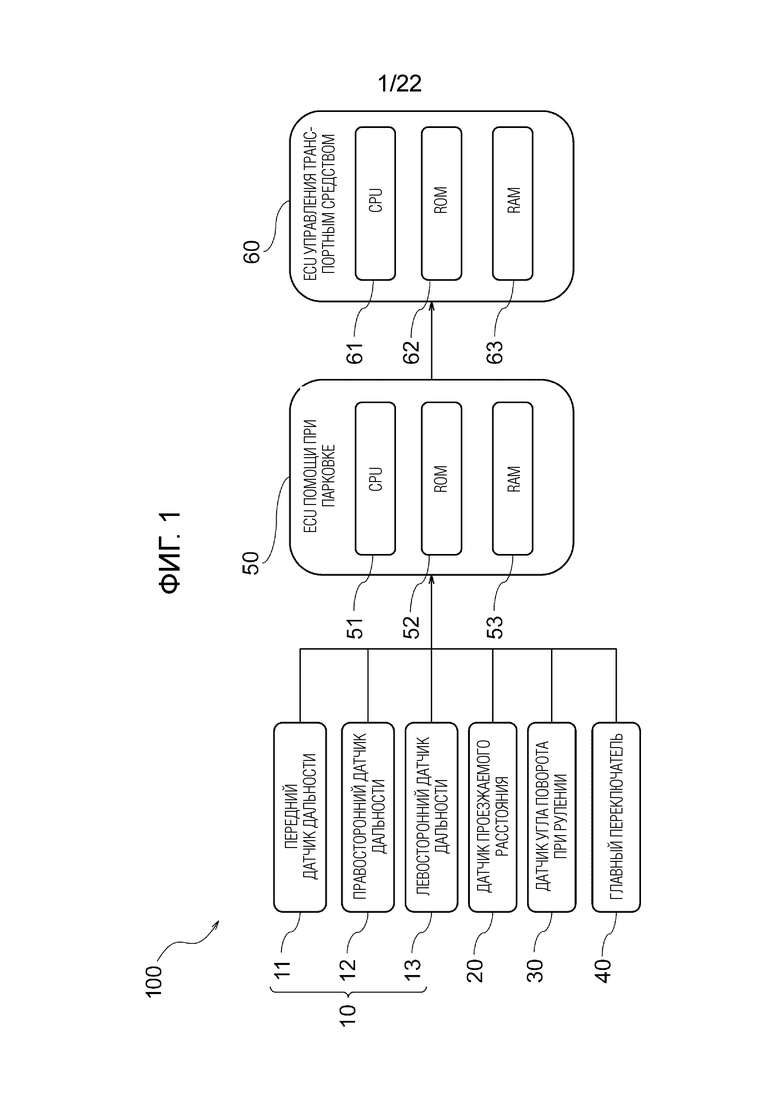
[0009] В дальнейшем в этом документе, описываются один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является схемой, иллюстрирующей конфигурацию устройства 100 помощи при парковке согласно варианту осуществления настоящего изобретения. Устройство 100 помощи при парковке, установленное в транспортном средстве, согласно настоящему варианту осуществления помогает в операции перемещения (парковки) транспортного средства на пространство для парковки. Устройство 100 помощи при парковке согласно настоящему варианту осуществления содержит набор датчиков 10 дальности, датчик 20 проезжаемого расстояния, датчик 30 угла поворота при рулении, главный переключатель 40, электронный модуль 50 управления (ECU) помощи при парковке и ECU 60 управления транспортным средством. Устройство 100 помощи при парковке дополнительно содержит аппаратные модули, такие как ECU управления двигателем и ECU усиления за счет мощности (не проиллюстрированы), которые обычно оснащаются в транспортном средстве. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
[0010] Как проиллюстрировано на чертеже, набор датчиков 10 дальности включает в себя, например, передний датчик 11 дальности, правосторонний датчик 12 дальности и левосторонний датчик 13 дальности. Передний датчик 11 дальности, который предоставляется в/около переднего бампера транспортного средства, обнаруживает полярные координаты (расстояния и ориентации) облака точек отражения (см. фиг. 3) объекта, существующего впереди рассматриваемого транспортного средства, и выводит их в ECU 50 помощи при парковке. Правосторонний датчик 12 дальности, который предоставляется в правой стороне транспортного средства (например, в передней правой части рассматриваемого транспортного средства), обнаруживает полярные координаты облака точек отражения объекта, существующего на правой стороне рассматриваемого транспортного средства, и выводит их в ECU 50 помощи при парковке. Левосторонний датчик 13 дальности, который предоставляется в левой стороне транспортного средства (например, в передней левой части рассматриваемого транспортного средства), обнаруживает полярные координаты облака точек отражения объекта, существующего на левой стороне рассматриваемого транспортного средства, и выводит их в ECU 50 помощи при парковке.
[0011] Примеры датчиков 10 дальности включают в себя лазерные сканеры, радары и стереокамеры. Любой датчик может использоваться в качестве каждого датчика дальности, при условии, что он может обнаруживать полярные координаты облака точек отражения объекта. Область обнаружения набора датчиков 10 дальности задается таким образом, чтобы иметь возможность обнаруживать полярные координаты облаков точек отражения двух или более припаркованных транспортных средств, которые существуют, по меньшей мере, справа и слева от полосы для проезда для рассматриваемого транспортного средства.
[0012] Датчик 20 проезжаемого расстояния вычисляет величину перемещения рассматриваемого транспортного средства и выводит ее в ECU 50 помощи при парковке. Датчик 20 проезжаемого расстояния может быть сконфигурирован, например, с использованием соответствующего датчика, такого как датчик частоты вращения, который определяет частоту вращения одного или более колес рассматриваемого транспортного средства.
[0013] Датчик 30 угла поворота при рулении, который оснащен в рулевой колонке, например, определяет угол вращения руля и выводит его в ECU 50 помощи при парковке.
[0014] Главный переключатель 40, который представляет собой переключатель для управления пользователем, чтобы вводить начало помощи при парковке, выводит сигнал выключения в ECU 50 помощи при парковке, если нет управления, и выводит сигнал включения в ECU 50 помощи при парковке в случае управления. Главный переключатель 40 располагается, например, в любой позиции, в которой водитель может управлять им, к примеру, в позиции около приборной панели или руля рассматриваемого транспортного средства. Примеры главного переключателя 40 также включают в себя программный переключатель, представленный на экране навигационного устройства, и программный переключатель, представленный на экране портативного терминала, такого как смартфон, который может обмениваться данными с транспортным средством через сеть.
[0015] ECU 50 помощи при парковке представляет собой контроллер, который всесторонне управляет устройством 100 помощи при парковке. ECU 50 помощи при парковке содержит ROM 52, которое сохраняет программу помощи при парковке, CPU 51 в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 52, так что она служит в качестве устройства 100 помощи при парковке согласно настоящему варианту осуществления, и RAM 53, которое служит в качестве доступного устройства хранения данных. ECU 50 помощи при парковке, в который вводится информация по обнаружению из набора датчиков 10 дальности, датчика 20 проезжаемого расстояния, датчика 30 угла поворота при рулении и главного переключателя 40, выполняет процесс оценки доступного пространства для парковки, который описывается ниже, затем вычисляет целевую скорость транспортного средства и целевой угол поворота при рулении рассматриваемого транспортного средства и выводит их в ECU 60 управления транспортным средством.
[0016] ECU 60 управления транспортным средством представляет собой контроллер, который выполняет управление приведением в движение транспортного средства. ECU 60 управления транспортным средством содержит ROM 62, которое сохраняет программу управления приведением в движение транспортного средства, CPU 61 в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 62, так что она служит в качестве устройства управления транспортного средства, и RAM 63, которое служит в качестве доступного устройства хранения данных. ECU 60 управления транспортным средством, в который вводятся целевая скорость транспортного средства и целевой угол поворота при рулении транспортного средства из ECU 50 помощи при парковке, выполняет управление приведением в движение транспортного средства, совместно с ECU управления двигателем, ECU усиления за счет мощности системы руления и т.д.
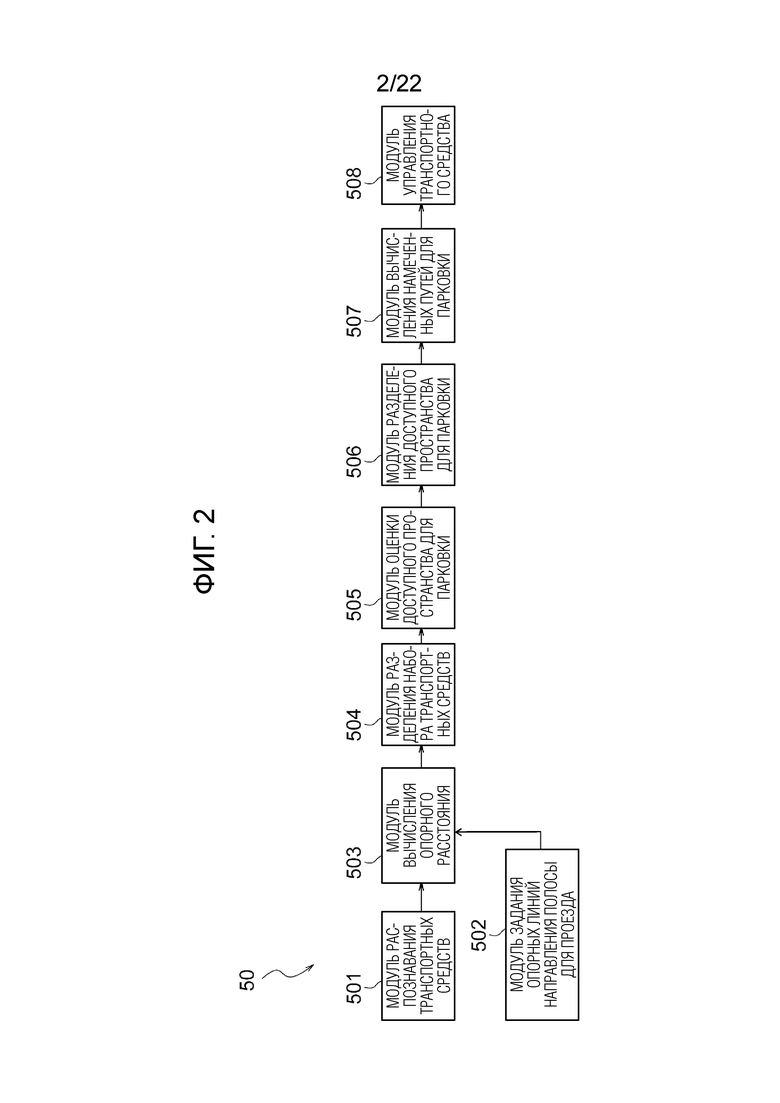
[0017] Фиг. 2 является блок-схемой для описания функций ECU 50 помощи при парковке. Как проиллюстрировано на чертеже, ECU 50 помощи при парковке содержит модуль 501 распознавания транспортных средств, модуль 502 задания опорных линий направления полосы для проезда, модуль 503 вычисления опорного расстояния, модуль 504 разделения набора транспортных средств, модуль 505 оценки доступного пространства для парковки, модуль 506 разделения доступного пространства для парковки, модуль 507 вычисления намеченных путей для парковки и модуль 508 управления транспортного средства.
[0018] Модуль 501 распознавания транспортных средств распознает припаркованные транспортные средства 2 (см. фиг. 3 и т.д.) на основе групп позиционной информации точек отражения (в дальнейшем называемых "облаками точек"), которые вводятся в качестве облаков полярных координат из набора датчиков 10 дальности. Модуль 501 распознавания транспортных средств сначала выполняет преобразование координат для облаков точек, которые вводятся из переднего датчика 11 дальности, правостороннего датчика 12 дальности и левостороннего датчика 13 дальности, из полярных координат в координаты на плоскости XY для интеграции, и затем выполняет кластеризацию, чтобы извлекать облака точек из близких точек.
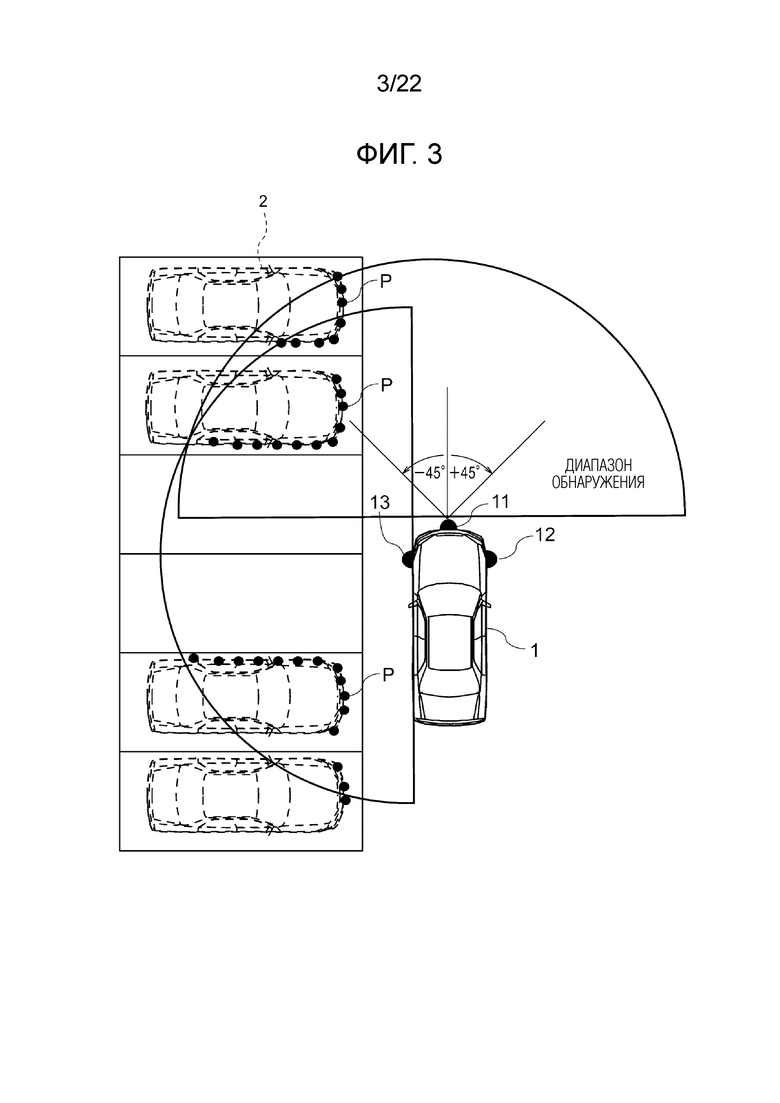
[0019] Фиг. 3 является видом сверху для описания процесса распознавания для припаркованных транспортных средств 2. Как проиллюстрировано на чертеже, припаркованные транспортные средства 2, существующие на автомобильной парковке, извлекаются в качестве Г-образного облака точек посредством модуля 501 распознавания транспортных средств. Способ распознавания припаркованных транспортных средств 2 не ограничен вышеописанным способом, и также могут использоваться другие известные способы.
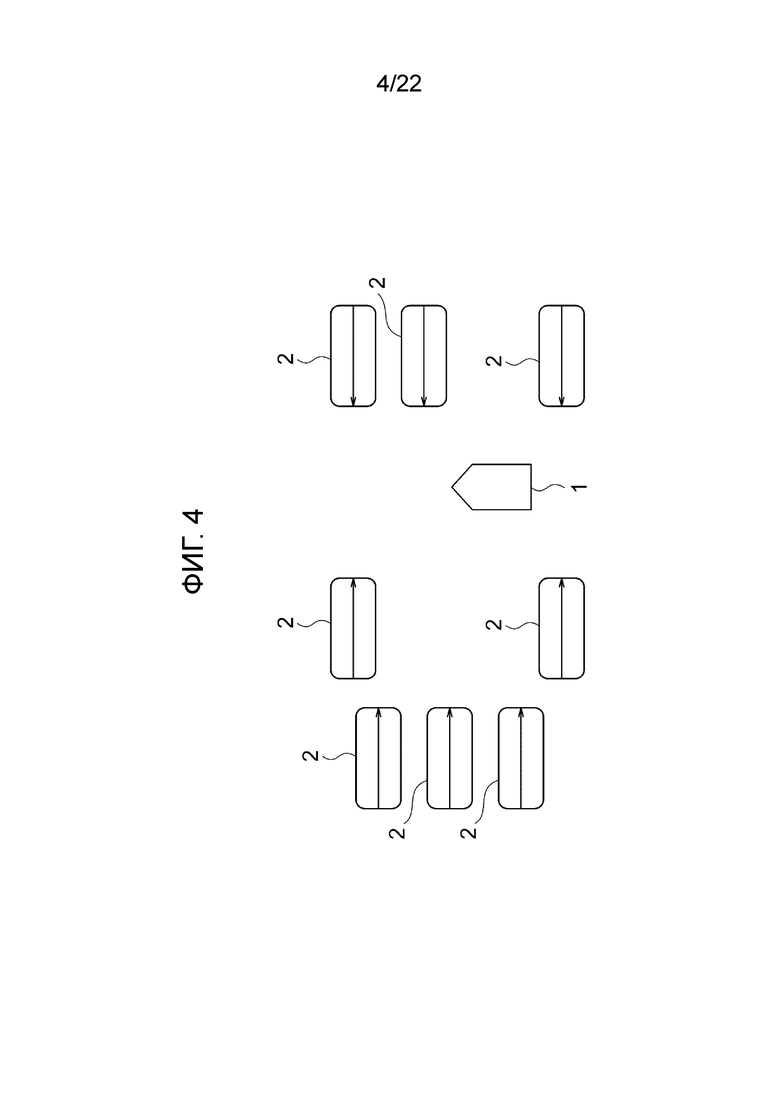
[0020] Фиг. 4 является видом сверху для описания процесса вычисления для позиций и направлений припаркованных транспортных средств 2. Модуль 501 распознавания транспортных средств вычисляет позиции и направления припаркованных транспортных средств 2 на основе информации относительно Г-образных облаков точек, которые извлекаются посредством кластеризации. Например, модуль 501 распознавания транспортных средств вычисляет характерную точку P (см. фиг. 3) каждого припаркованного транспортного средства 2 на основе информации относительно соответствующего Г-образного облака точек и выводит позицию вычисленной характерной точки P и направление в модуль 503 вычисления опорного расстояния в качестве позиции и направления припаркованного транспортного средства 2.
[0021] Здесь, одна из Г-образной пары прямых линий представляет собой прямую линию, представляющую переднюю поверхность припаркованного транспортного средства 2, припаркованного в обратном направлении, или заднюю поверхность припаркованного транспортного средства 2, припаркованного в прямом направлении, тогда как другая прямая линия представляет собой прямую линию, представляющую боковую поверхность припаркованного транспортного средства 2. Как проиллюстрировано на фиг. 3, в ситуации, в которой вектор, указывающий направление рассматриваемого транспортного средства 1, и вектор, указывающий направление припаркованного транспортного средства 2, находятся под прямым углом, передняя поверхность припаркованного транспортного средства 2, припаркованного в обратном направлении, или задняя поверхность припаркованного транспортного средства 2, припаркованного в прямом направлении, попадают в пределы диапазона от 45° на левой стороне до 45° на правой стороне относительно вектора, указывающего направление рассматриваемого транспортного средства 1. Модуль 501 распознавания транспортных средств в силу этого извлекает прямую линию, которая попадает в пределы диапазона от 45° на левой стороне до 45° на правой стороне относительно вектора, указывающего направление рассматриваемого транспортного средства 1, в качестве прямой линии, представляющей переднюю поверхность припаркованного транспортного средства 2, припаркованного в обратном направлении, или заднюю поверхность припаркованного транспортного средства 2, припаркованного в прямом направлении. Затем модуль 501 распознавания транспортных средств вычисляет центральную точку извлеченной прямой линии в качестве характерной точки P припаркованного транспортного средства 2.
[0022] Модуль 501 распознавания транспортных средств вычисляет не только позицию характерной точки P припаркованного транспортного средства 2, но также и направление припаркованного транспортного средства 2 на основе направления прямой линии, представляющей переднюю поверхность или заднюю поверхность припаркованного транспортного средства 2, и направления прямой линии, представляющей боковую поверхность припаркованного транспортного средства 2, и выводит информацию относительно позиции характерной точки P припаркованного транспортного средства 2 и направления припаркованного транспортного средства 2 в модуль 503 вычисления опорного расстояния. Непринципиально задавать характерную точку P припаркованного транспортного средства 2 как центр передней поверхности или задней поверхности припаркованного транспортного средства 2, и характерная точка P может задаваться как идентичная позиция для множества припаркованных транспортных средств 2. Например, характерная точка P может задаваться как правый или левый конец передней части припаркованного транспортного средства 2 или также может задаваться как центр (центр тяжести) и т.п. припаркованного транспортного средства 2.
[0023] Фиг. 5 является видом сверху для описания процесса задания для опорной линии L направления полосы для проезда. Модуль 502 задания опорных линий направления полосы для проезда задает направление полосы для проезда для рассматриваемого транспортного средства, задает опорную линию L направления полосы для проезда, которая представляет собой прямую линию вдоль направления полосы для проезда, как полосу для проезда для рассматриваемого транспортного средства 1 и выводит опорную линию L направления полосы для проезда в модуль 503 вычисления опорного расстояния. Опорная линия L направления полосы для проезда представляет собой прямую линию, которая проходит через произвольную точку рассматриваемого транспортного средства 1 (например, вышеописанный центр передней поверхности рассматриваемого транспортного средства 1).
[0024] Примерный способ задания направления полосы для проезда для рассматриваемого транспортного средства 1 может включать в себя создание гистограммы распределения направлений припаркованных транспортных средств 2, распознанных посредством модуля 501 распознавания транспортных средств, и определение направления предварительно определенного угла относительно направления, которое предоставляет пик для вышеуказанных направлений, в качестве направления полосы для проезда. Этот способ может применяться к случаю предварительного получения информации относительно угла между направлением полосы для проезда для рассматриваемого транспортного средства 1 и направлением парковочной рамки. Например, в случае предварительно получения информации, указывающей то, что угол между направлением полосы для проезда для рассматриваемого транспортного средства 1 и направлением парковочной рамки составляет 90°, направление полосы для проезда, которое должно задаваться, представляет собой направление в 90° относительно направления, которое предоставляет пик для направлений припаркованных транспортных средств 2.
[0025] Другой примерный способ задания направления полосы для проезда для рассматриваемого транспортного средства 1 может включать в себя использование навигационной системы, чтобы получать картографические данные, которые включают в себя автомобильную парковку, и выполнение согласования между картографическими данными и позицией рассматриваемого транспортного средства 1, чтобы обнаруживать направление полосы для проезда для рассматриваемого транспортного средства 1. Помимо этого или альтернативно, информация относительно направления полосы для проезда для рассматриваемого транспортного средства 1 может получаться через инфраструктурные системы, такие как система управления дорожным движением при взаимодействии между транспортным средством и инфраструктурой и система помощи для безопасного вождения при взаимодействии между транспортным средством и инфраструктурой.
[0026] Фиг. 6 является видом сверху для описания процесса вычисления для опорных расстояний X. Модуль 503 вычисления опорного расстояния вычисляет опорные расстояния X, которые представляют собой расстояния между позициями характерных точек P припаркованных транспортных средств 2 и опорной линией L направления полосы для проезда, и относительные позиция припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда, и выводит вычисленные опорные расстояния X и относительные позиции в модуль 504 разделения набора транспортных средств. При вычислении относительных позиций припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда, модуль 503 вычисления опорного расстояния вычисляет то, расположено каждое припаркованное транспортное средство 2 на правой стороне или на левой стороне относительно опорной линии L направления полосы для проезда.
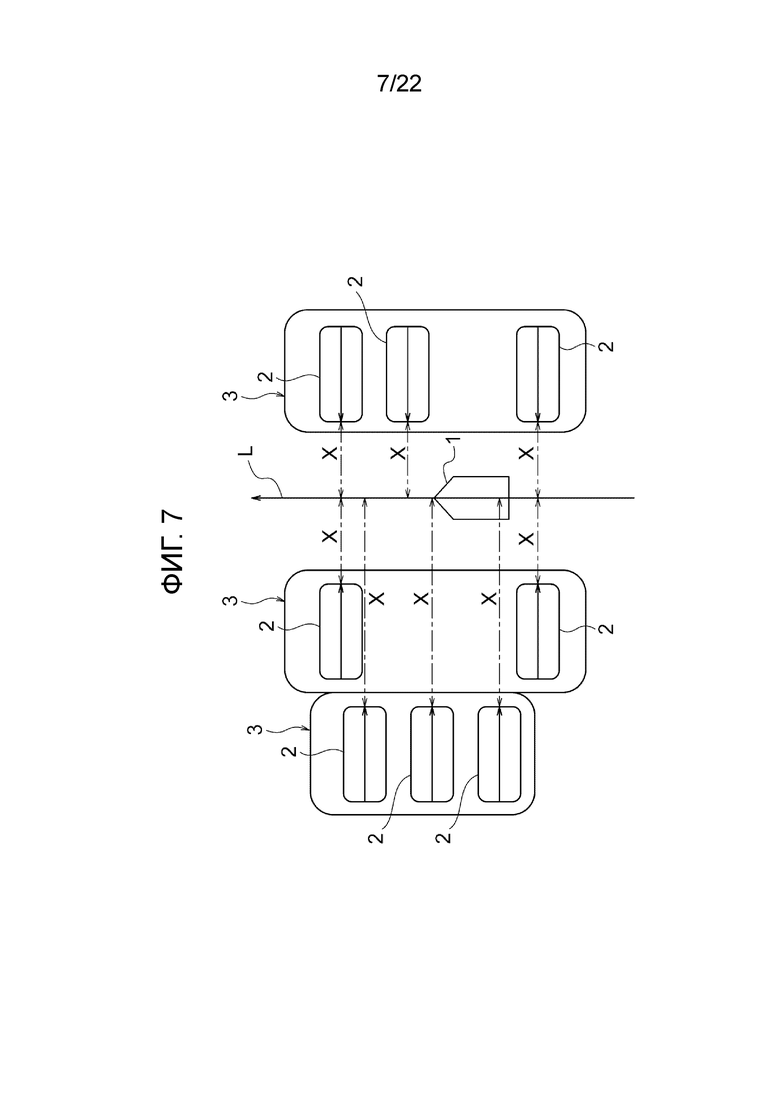
[0027] Фиг. 7 является видом сверху для описания процесса группировки для набора транспортных средств 3. Модуль 504 разделения набора транспортных средств группирует два или более припаркованных транспортных средств 2, которые имеют сравнимые опорные расстояния X и идентичные относительные позиции припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда, в набор транспортных средств 3, и выводит информацию по набору транспортных средств 3 и двум или более припаркованным транспортным средствам 2, включенным в набор транспортных средств 3, в модуль 505 оценки доступного пространства для парковки.
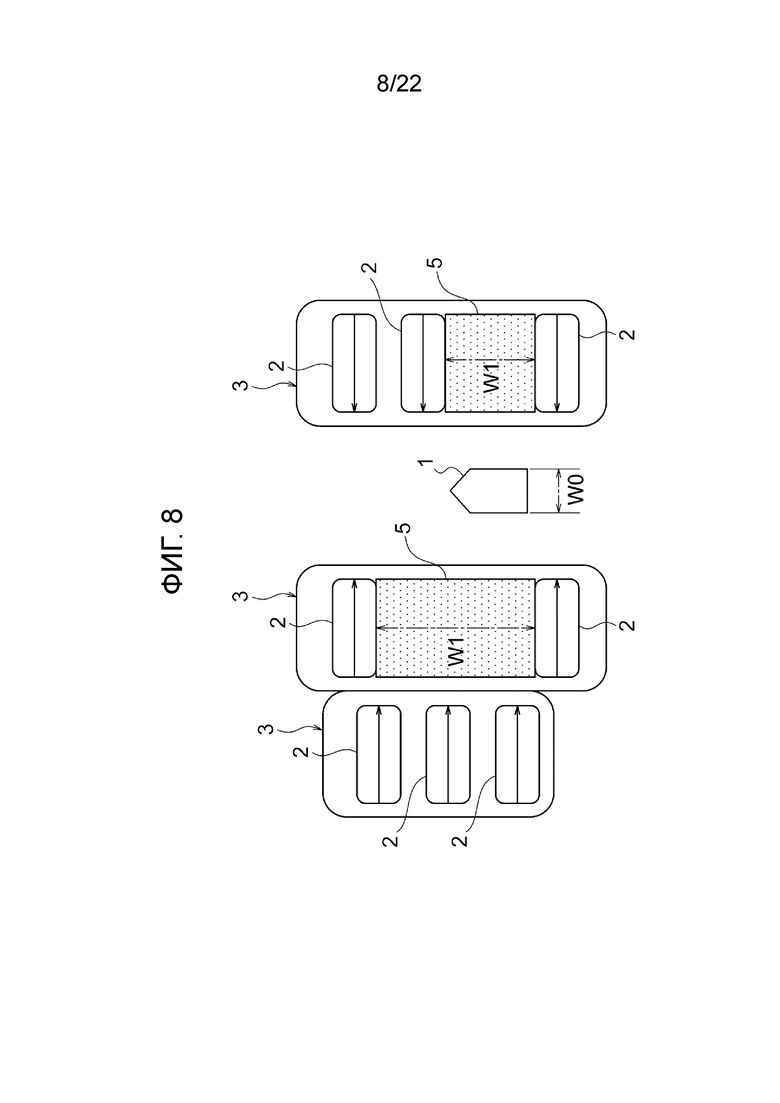
[0028] Фиг. 8 является видом сверху для описания процесса оценки для доступного пространства 5 для парковки. Во-первых, когда существует два или более наборов транспортных средств 3, модуль 505 оценки доступного пространства для парковки выбирает один или более наборов транспортных средств 3, которые являются ближайшими к рассматриваемому транспортному средству 1, из числа двух или более наборов транспортных средств 3. Следует понимать, что когда существует только один набор транспортных средств 3, модуль 505 оценки доступного пространства для парковки вследствие этого выбирает один набор транспортных средств 3. Затем модуль 505 оценки доступного пространства для парковки вычисляет расстояние W1 между транспортными средствами для смежных припаркованных транспортных средств 2 в выбранных одном или более наборов транспортных средств 3.
[0029] Здесь, в случае схемы парковки под прямым углом, как проиллюстрировано на фиг. 8, вместо схемы парковки под углом, расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют взаимосвязи выражения (1), как пояснено ниже (т.е. взаимосвязи, в которой расстояние W1 между транспортными средствами превышает ширину W0 рассматриваемого транспортного средства 1). Соответственно, когда вычисленное расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют взаимосвязи выражения (1), модуль 505 оценки доступного пространства для парковки оценивает пространство, в котором расстояние W1 между транспортными средствами удовлетворяет взаимосвязи выражения (1), в качестве доступного пространства 5 для парковки и выводит результат оценки в модуль 506 разделения доступного пространства для парковки. Способ оценки доступного пространства 5 для парковки может осуществляться на основе информации облаков точек, полученной посредством радара, или также может осуществляться на основе результата распознавания, полученного посредством камеры.
W1>W0... (1)
[0030] Модуль 505 оценки доступного пространства для парковки задает доступное пространство 5 для парковки таким образом, что доступное пространство 5 для парковки включает в себя, по меньшей мере, область, на которую одно из припаркованных транспортных средств 2, расположенных с обеих сторон доступного пространства 5 для парковки (например, припаркованное транспортное средство 2, имеющее большую общую длину), проецируется в направлении ширины транспортного средства.
[0031] Фиг. 9 является видом сверху для описания процесса разделения для доступного пространства 5 для парковки. Модуль 506 разделения доступного пространства для парковки вычисляет то, соответствует или нет ширина W1 оцененного доступного пространства 5 для парковки превышению в n раз (n является целым числом) предварительно заданной ширины W2 парковочной рамки, как представлено посредством выражения (2), как пояснено ниже. Например, когда ширина W1 оцененного доступного пространства 5 для парковки составляет 6 м, и предварительно заданная ширина W2 парковочной рамки составляет 2,5 м, ширина W1 доступного пространства 5 для парковки соответствует превышению в два раза (n=2) ширины W2 парковочной рамки.
n=W1/W2... (2)
[0032] Затем модуль 506 разделения доступного пространства для парковки разделяет доступное пространство 5 для парковки в направлении ширины (в направлении, параллельном направлению полосы для проезда) на целое число n, представленное посредством вышеуказанного выражения (2), и выводит информацию относительно разделенного доступного пространства 5 для парковки в модуль 507 вычисления намеченных путей для парковки. В нижеприведенном описании, n доступных пространств для парковки, включенных в доступное пространство 5 для парковки, называются "доступными подпространствами 6 для парковки".
[0033] Когда информация относительно доступного пространства 5 для парковки вводится из модуля 506 разделения доступного пространства для парковки, модуль 507 вычисления намеченных путей для парковки вычисляет намеченный путь для парковки в каждое доступное подпространство 6 для парковки. Способ вычисления намеченного пути для парковки не ограничен конкретным образом, и могут использоваться различные известные способы. Когда n доступных подпространств 6 для парковки включают в себя доступное подпространство 6 для парковки, которое задается с возможностью отменяться пользователем рассматриваемого транспортного средства 1, намеченный путь для парковки в доступное подпространство 6 для парковки не вычисляется. Это позволяет уменьшать вычислительную нагрузку.
[0034] При вычислении намеченного пути для парковки, модуль 507 вычисления намеченных путей для парковки сначала задает целевую позицию для парковки в каждом доступном подпространстве 6 для парковки. В примерном способе задания целевой позиции для парковки, целевая позиция для парковки может задаваться как позиция, в которой центральные точки в продольном направлении и направлении ширины выбранного доступного подпространства 6 для парковки совпадают с центральными точками в продольном направлении и направлении ширины рассматриваемого транспортного средства 1. Затем модуль 507 вычисления намеченных путей для парковки вычисляет намеченный путь для парковки в целевую позицию для парковки в каждом доступном подпространстве 6 для парковки.
[0035] При вычислении намеченного пути для парковки, модуль 507 вычисления намеченных путей для парковки может выбирать одно доступное подпространство 6 для парковки из числа n доступных подпространств 6 для парковки, включенных в доступное пространство 5 для парковки, и вычислять намеченный путь для парковки в выбранное доступное подпространство 6 для парковки. В примерном способе выбора одного доступного подпространства 6 для парковки из числа n доступных подпространств 6 для парковки, может выбираться доступное подпространство 6 для парковки, ближайшее к рассматриваемому транспортному средству 1.
[0036] Модуль 508 управления транспортного средства вычисляет значение команды управления транспортным средством для движения по намеченному пути для парковки, вводимое из модуля 507 вычисления намеченных путей для парковки, и выводит значение команды управления транспортным средством в ECU 60 управления транспортным средством. Примеры значения команды управления транспортным средством включают в себя целевую скорость транспортного средства и целевой угол поворота при рулении, например, но другие значения команд, такие как ускорение рассматриваемого транспортного средства, могут быть включены в значение команды управления транспортным средством. Способ вычисления значения команды управления транспортным средством не ограничен конкретным образом, и могут использоваться различные известные способы.
[0037] Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления для процесса помощи при парковке, выполняемого посредством устройства 100 помощи при парковке согласно настоящему варианту осуществления. В настоящем варианте осуществления, когда сигнал включения вводится из главного переключателя 40 в ECU 50 помощи при парковке, начинается процесс помощи при парковке, после чего выполняется этап S101.
[0038] На этапе S101, информация по обнаружению из набора датчиков 10 дальности, датчика 20 проезжаемого расстояния и датчика 30 угла поворота при рулении вводится в ECU 50 помощи при парковке. Затем на этапе S102, модуль 501 распознавания транспортных средств выполняет процесс распознавания припаркованных транспортных средств на основе информации относительно облаков точек, которая вводится в качестве облаков полярных координат из набора датчиков 10 дальности (см. фиг. 3). Когда припаркованные транспортные средства 2 распознаются на этапе S102, процедура переходит к этапу S103, тогда как, когда припаркованные транспортные средства 2 не распознаются на этапе S102, процесс помощи при парковке завершается.
[0039] На этапе S103, модуль 501 распознавания транспортных средств вычисляет позиции и направления припаркованных транспортных средств 2 на основе информации относительно Г-образных облаков точек, извлеченных посредством кластеризации, и выводит позиции и направления припаркованных транспортных средств 2 в модуль 503 вычисления опорного расстояния (см. фиг. 4). Затем на этапе S104, модуль 502 задания опорных линий направления полосы для проезда задает опорную линию L направления полосы для проезда на полосе для проезда для рассматриваемого транспортного средства 1 и выводит опорную линию L направления полосы для проезда в модуль 503 вычисления опорного расстояния (см. фиг. 5). Затем на этапе S105, модуль 503 вычисления опорного расстояния вычисляет вышеуказанные опорные расстояния X и относительные позиции припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда и выводит вычисленные опорные расстояния X и относительные позиции припаркованных транспортных средств 2 в модуль 504 разделения набора транспортных средств (см. фиг. 6).
[0040] Затем на этапе S106 и этапе S107, модуль 504 разделения набора транспортных средств выполняет процесс группировки двух или более припаркованных транспортных средств 2 в набор транспортных средств 3 (см. фиг. 7). Во-первых, на этапе S106, модуль 504 разделения набора транспортных средств определяет то, существуют или нет два или более припаркованных транспортных средств 2, которые имеют сравнимые опорные расстояния X и идентичные относительные позиции припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда. Когда положительное определение выполняется на этапе S106, процедура переходит к этапу S107, тогда как, когда отрицательное определение выполняется на этапе S106, процесс помощи при парковке завершается. На этапе S107, модуль 504 разделения набора транспортных средств группирует два или более припаркованных транспортных средств 2, которые имеют сравнимые опорные расстояния X и идентичные относительные позиции припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда в набор транспортных средств 3, и выводит информацию по набору транспортных средств 3 и двум или более припаркованным транспортным средствам 2, включенным в набор транспортных средств 3, в модуль 505 оценки доступного пространства для парковки.
[0041] Затем на этапе S108 и этапе S109, модуль 505 оценки доступного пространства для парковки выполняет процесс оценки для доступного пространства 5 для парковки (см. фиг. 8). Во-первых, на этапе S108, модуль 505 оценки доступного пространства для парковки выбирает один или более наборов транспортных средств 3, которые являются ближайшими к рассматриваемому транспортному средству 1, и вычисляет расстояние W1 между транспортными средствами для смежных припаркованных транспортных средств 2 в выбранных одном или более наборов транспортных средств 3. Затем на этапе S109, модуль 505 оценки доступного пространства для парковки определяет то, удовлетворяют или нет вычисленное расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 взаимосвязи вышеуказанного выражения (1). Когда положительное определение выполняется на этапе S109, процедура переходит к этапу S110, тогда как, когда отрицательное определение выполняется на этапе S109, процесс помощи при парковке завершается.
[0042] На этапе S110, модуль 505 оценки доступного пространства для парковки оценивает область, в которой расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют взаимосвязи вышеуказанного выражения (1), в качестве доступного пространства 5 для парковки, и выводит результат оценки в модуль 506 разделения доступного пространства для парковки. Затем на этапе S111, модуль 506 разделения доступного пространства для парковки разделяет доступное пространство 5 для парковки в направлении ширины на целое число n, представленное посредством вышеуказанного выражения (2), и выводит информацию относительно разделенного доступного пространства 5 для парковки в модуль 507 вычисления намеченных путей для парковки (см. фиг. 9). В случае n=1, разделение доступного пространства 5 для парковки вследствие этого не выполняется.
[0043] Затем на этапе S112, модуль 507 вычисления намеченных путей для парковки вычисляет намеченный путь для парковки в каждое доступное подпространство 6 для парковки. Затем на этапе S113, модуль 508 управления транспортного средства вычисляет значение команды управления транспортным средством для движения по намеченному пути для парковки, которое вводится из модуля 507 вычисления намеченных путей для парковки, и выводит значение команды управления транспортным средством в ECU 60 управления транспортным средством. ECU 60 управления транспортным средством выполняет управление приведением в движение для рассматриваемого транспортного средства 1 в соответствии со значением команды управления транспортным средством, которое вводится из модуля 508 управления транспортного средства. Процесс помощи при парковке в силу этого завершается.
[0044] В вышеописанной процедуре управления для процесса помощи при парковке, после того, как намеченный путь для парковки в доступное подпространство 6 для парковки вычисляется, операция парковки выполняется для того, чтобы завершать процесс помощи при парковке, но настоящее изобретение не ограничено этим, и процедура может возвращаться от этапа S113 к этапу S102, чтобы последовательно корректировать намеченный путь для парковки.
[0045] В вышеописанной процедуре управления для процесса помощи при парковке, когда расстояние W1 между транспортными средствами для припаркованных транспортных средств 2 в сгруппированном наборе транспортных средств 3 превышает ширину W0 одного транспортного средства, доступное пространство 5 для парковки оценивается между припаркованными транспортными средствами 2. В альтернативном варианте осуществления, когда расстояние W1 между транспортными средствами для припаркованных транспортных средств 2 в наборе транспортных средств 3 превышает ширину W0 одного транспортного средства, и пространство, имеющее продольную длину, превышающую длину одного транспортного средства, существует между припаркованными транспортными средствами 2 в наборе транспортных средств 3, доступное пространство 5 для парковки может оцениваться между припаркованными транспортными средствами 2. В этом случае, позиция в продольном направлении рассматриваемого транспортного средства 1, припаркованного в доступном пространстве 5 для парковки, может совмещаться с позициями в продольном направлении других припаркованных транспортных средств 2, и можно не допускать выступание рассматриваемого транспортного средства 1, припаркованного в доступном пространстве 5 для парковки, за пределы парковочной рамки.
[0046] Как описано выше, в способе помощи при парковке и устройстве 100 помощи при парковке согласно настоящему варианту осуществления, информация распознавания относительно припаркованных транспортных средств 2, существующих на автомобильной парковке, получается из набора датчиков 10 дальности, два или более транспортных средств, припаркованные рядом, извлекаются из вышеуказанной информации распознавания и группируются в набор транспортных средств 3, и доступное пространство 5 для парковки оценивается между припаркованными транспортными средствами 2, включенными в набор транспортных средств 3. Это обеспечивает возможность оценки доступного пространства для парковки, даже когда сигнальная разметочная линия, представляющая парковочную рамку, не может распознаваться по некоторым причинам, например, сигнальной разметочной линии не существует, или сигнальная разметочная линия является нечеткой.
[0047] В способе помощи при парковке и устройстве 100 помощи при парковке согласно настоящему варианту осуществления, опорная линия L направления полосы для проезда, протягивающаяся вдоль полосы для проезда автомобильной парковки, задается, опорные расстояния X между опорной линией L направления полосы для проезда и припаркованными транспортными средствами 2, включенными в информацию распознавания, полученную из набора датчиков 10 дальности, вычисляются, и два или более транспортных средств группируются в набор транспортных средств 3 на основе опорных расстояний X. Через эту операцию, два или более припаркованных транспортных средств 2, припаркованных рядом вдоль полосы для проезда автомобильной парковки, могут группироваться в набор транспортных средств 3.
[0048] В способе помощи при парковке и устройстве 100 помощи при парковке согласно настоящему варианту осуществления, когда пространство, в котором расстояние W1 между транспортными средствами превышает ширину W0 одного транспортного средства, существует между припаркованными транспортными средствами 2, включенными в сгруппированный набор транспортных средств 3, пространство оценивается в качестве доступного пространства 5 для парковки. Это обеспечивает возможность парковки, по меньшей мере, одного транспортного средства в доступном пространстве 5 для парковки, существующем в области сгруппированного набора транспортных средств 3.
[0049] В способе помощи при парковке и устройстве 100 помощи при парковке согласно настоящему варианту осуществления, когда расстояние W1 между транспортными средствами для припаркованных транспортных средств 2, расположенных с обеих сторон доступного пространства 5 для парковки, превышает значение, полученное посредством умножения предварительно определенной ширины W2 парковочной рамки на целое число n, большее единицы, доступное пространство 5 для парковки разделяется на целое число n в направлении расстановки припаркованных транспортных средств 2 в наборе транспортных средств 3. Это обеспечивает возможность парковки, по меньшей мере, n транспортных средств в доступном пространстве 5 для парковки, существующем в области сгруппированного набора транспортных средств 3.
[0050] В способе помощи при парковке и устройстве 100 помощи при парковке согласно настоящему варианту осуществления, намеченный путь для парковки в доступное пространство 5 для парковки формируется, и рассматриваемое транспортное средство 1 управляется таким образом, что оно движется по намеченному пути для парковки. Это обеспечивает возможность выполнения автоматизированной парковки без необходимости операции водителя.
[0051] Фиг. 11 является блок-схемой для описания функций ECU 150 помощи при парковке согласно другому варианту осуществления настоящего изобретения. Как проиллюстрировано на чертеже, ECU 150 помощи при парковке содержит модуль 501 распознавания транспортных средств, модуль 151 разделения набора транспортных средств, модуль 505 оценки доступного пространства для парковки, модуль 506 разделения доступного пространства для парковки, модуль 507 вычисления намеченных путей для парковки и модуль 508 управления транспортного средства. Описание функций, идентичных функциям ECU 50 помощи при парковке согласно вышеописанному варианту осуществления, опускается, и описание вышеописанного варианта осуществления заимствуется в данном документе.
[0052] Фиг. 12 является видом сверху для описания процесса группировки для набора транспортных средств 3. Модуль 151 разделения набора транспортных средств группирует два или более припаркованных транспортных средств 2, которые имеют сравнимые направления (например, разность углов находится в пределах ±0-10°), в набор транспортных средств 3 и выводит информацию по набору транспортных средств 3 и двум или более припаркованным транспортным средствам 2, включенным в набор транспортных средств 3, в модуль 505 оценки доступного пространства для парковки.
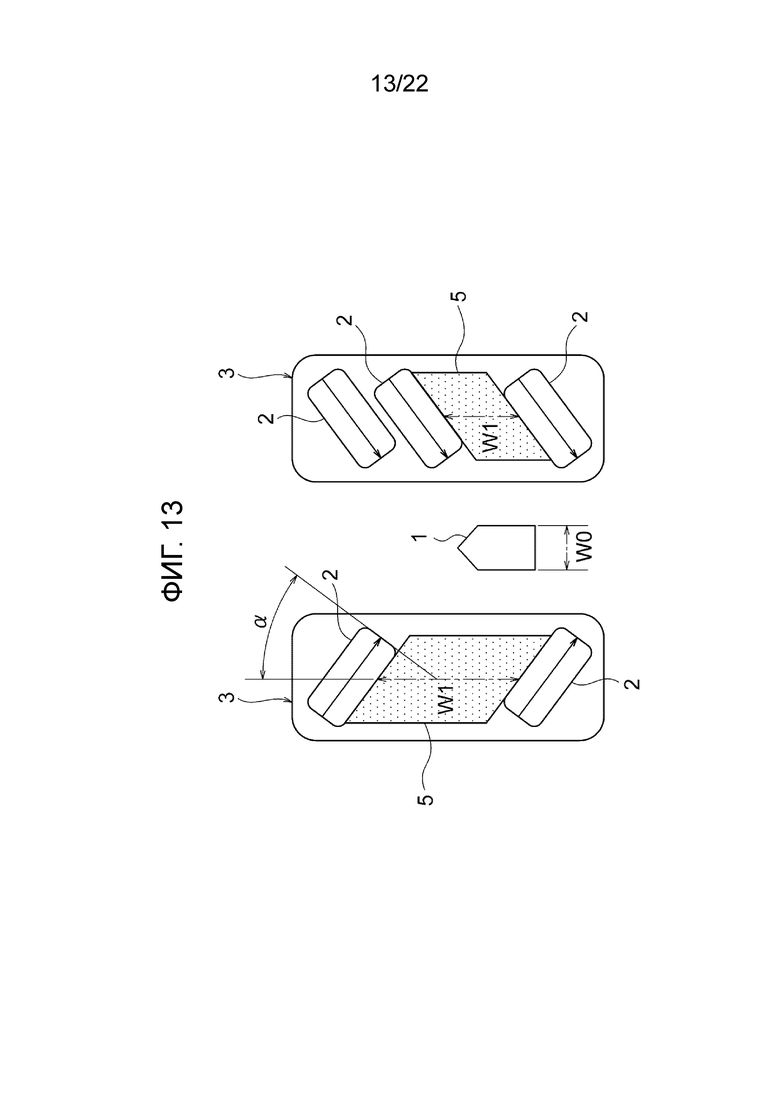
[0053] Фиг. 13 является видом сверху для описания процесса оценки для доступного пространства 5 для парковки. Во-первых, когда существует два или более наборов транспортных средств 3, модуль 505 оценки доступного пространства для парковки выбирает один или более наборов транспортных средств 3, которые являются ближайшими к рассматриваемому транспортному средству 1, из числа двух или более наборов транспортных средств 3. Затем модуль 505 оценки доступного пространства для парковки вычисляет расстояние W1 между транспортными средствами для смежных припаркованных транспортных средств 2 в выбранных одном или более наборов транспортных средств 3.
[0054] После этого, когда вычисленное расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют взаимосвязи выражения (3), как пояснено ниже, модуль 505 оценки доступного пространства для парковки оценивает область, в которой расстояние W1 между транспортными средствами удовлетворяет взаимосвязи выражения (3), в качестве доступного пространства 5 для парковки и выводит результат оценки в модуль 506 разделения доступного пространства для парковки.
W1>W0/cos α..., (3)
где α представляет угол между прямой линией, перпендикулярной продольному направлению припаркованных транспортных средств 2, и прямой линией, параллельной направлению полосы для проезда.
[0055] Здесь, в случае схемы парковки под прямым углом, как проиллюстрировано на фиг. 8, вместо схемы парковки под углом, угол α между прямой линией, перпендикулярной продольному направлению припаркованных транспортных средств 2, и прямой линией, параллельной направлению полосы для проезда, равен 0°, поскольку направление ширины парковочной рамки и направление расстановки парковочных рамок являются параллельными между собой. Следовательно, в таком случае, модуль 505 оценки доступного пространства для парковки оценивает доступное пространство 5 для парковки в ситуации, в которой расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют вышеуказанному выражению (1).
[0056] С другой стороны, в случае схемы парковки под углом, как проиллюстрировано на фиг. 13, угол между направлением ширины парковочной рамки и направлением расстановки парковочных рамок составляет определенный угол α (0°<α<90°). Следовательно, в таком случае, модуль 505 оценки доступного пространства для парковки оценивает доступное пространство 5 для парковки в ситуации, в которой расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют вышеуказанному выражению (3).
[0057] Доступное пространство 5 для парковки задается таким образом, что оно включает в себя, по меньшей мере, область, на которую одно из припаркованных транспортных средств 2, расположенных с обеих сторон доступного пространства 5 для парковки (например, припаркованное транспортное средство 2, имеющее большую общую длину), проецируется в направлении ширины транспортного средства.
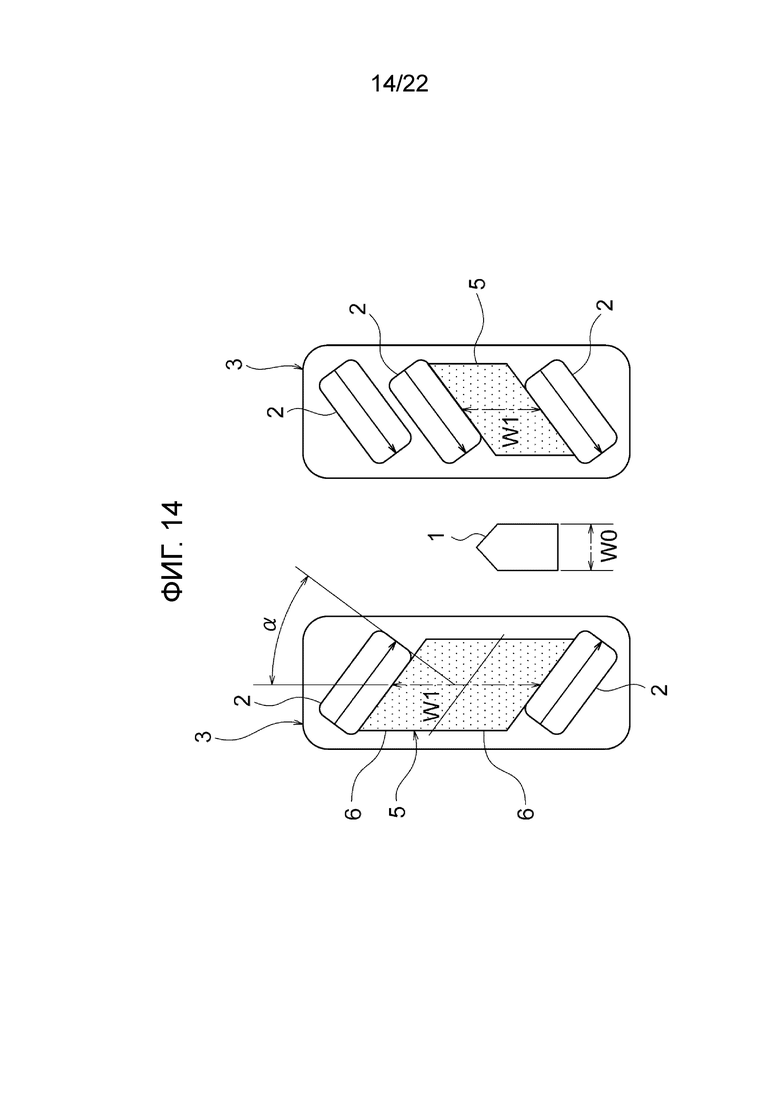
[0058] Фиг. 14 является видом сверху для описания процесса разделения для доступного пространства 5 для парковки. Модуль 506 разделения доступного пространства для парковки вычисляет то, соответствует или нет ширина W1 оцененного доступного пространства 5 для парковки превышению в n раз (n является целым числом) значения W2/cos α, как представлено посредством выражения (4), как указано ниже:
n=W1/(W2/cos α)..., (4)
где α представляет угол между прямой линией, перпендикулярной продольному направлению припаркованных транспортных средств 2, и прямой линией, параллельной направлению полосы для проезда, и W2 представляет предварительно заданную ширину парковочной рамки.
[0059] В случае схемы парковки под прямым углом, как проиллюстрировано на фиг. 9, вместо схемы парковки под углом, угол α между прямой линией, перпендикулярной продольному направлению припаркованных транспортных средств 2, и прямой линией, параллельной направлению полосы для проезда, равен 0°, поскольку направление ширины парковочной рамки и направление расстановки парковочных рамок являются параллельными между собой. Следовательно, в таком случае, модуль 506 разделения доступного пространства для парковки вычисляет то, соответствует или нет ширина W1 оцененного доступного пространства 5 для парковки превышению в n раз (n является целым числом) предварительно заданной ширины W2 парковочной рамки, как представлено посредством вышеуказанного выражения (2).
[0060] С другой стороны, в случае схемы парковки под углом, как проиллюстрировано на фиг. 14, угол между направлением ширины парковочной рамки и направлением расстановки парковочных рамок составляет определенный угол α (0°<α<90°). Следовательно, в таком случае, модуль 506 разделения доступного пространства для парковки вычисляет то, соответствует или нет ширина W1 оцененного доступного пространства 5 для парковки превышению в n раз (n является целым числом) значения W2/cos α, как представлено посредством вышеуказанного выражения (4).
[0061] Затем модуль 506 разделения доступного пространства для парковки разделяет доступное пространство 5 для парковки в направлении ширины (в направлении, параллельном направлению полосы для проезда) на целое число n, представленное посредством вышеуказанного выражения (4), и выводит информацию относительно разделенного доступного пространства 5 для парковки в модуль 507 вычисления намеченных путей для парковки.
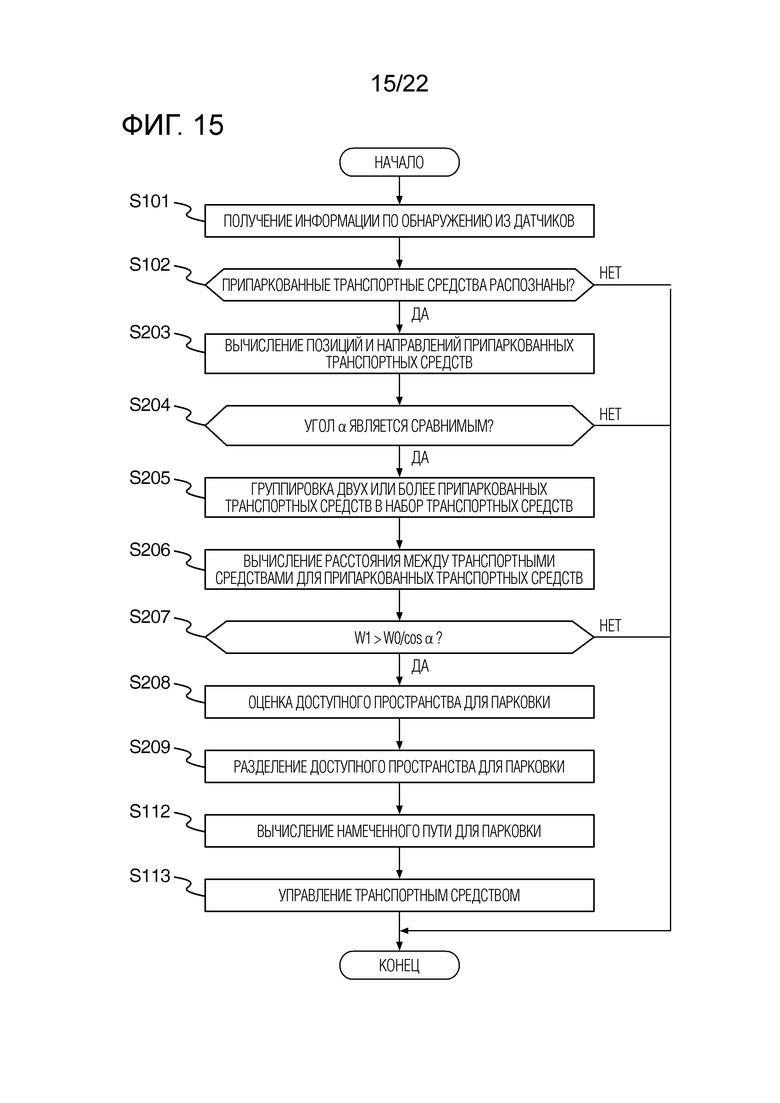
[0062] Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления для процесса помощи при парковке согласно настоящему варианту осуществления. В настоящем варианте осуществления, когда сигнал включения вводится из главного переключателя 40 в ECU 150 помощи при парковке, начинается процесс помощи при парковке, после чего выполняется этап S101.
[0063] Этапы S101 и S102 выполняются идентично процессу помощи при парковке вышеописанного варианта осуществления. Затем на этапе S203, модуль 501 распознавания транспортных средств вычисляет позиции и направления припаркованных транспортных средств 2 на основе информации относительно Г-образных облаков точек, извлеченных посредством кластеризации, и выводит позиции и направления припаркованных транспортных средств 2 в модуль 151 разделения набора транспортных средств (см. фиг. 4).
[0064] Затем на этапе S204 и этапе S205, модуль 151 разделения набора транспортных средств выполняет процесс группировки двух или более припаркованных транспортных средств 2 в набор транспортных средств 3 (см. фиг. 13). Во-первых, на этапе S204, модуль 151 разделения набора транспортных средств определяет то, существуют или нет два или более припаркованных транспортных средств 2, для которых угол α между прямой линией, перпендикулярной продольному направлению припаркованных транспортных средств 2, и прямой линией, параллельной направлению полосы для проезда, является сравнимым. Когда положительное определение выполняется на этапе S204, процедура переходит к этапу S205, тогда как, когда отрицательное определение выполняется на этапе S204, процесс помощи при парковке завершается. На этапе S205, модуль 151 разделения набора транспортных средств группирует два или более припаркованных транспортных средств 2, для которых вышеуказанный угол α является сравнимым, в набор транспортных средств 3 и выводит информацию по набору транспортных средств 3 и двум или более припаркованным транспортным средствам 2, включенным в набор транспортных средств 3, в модуль 505 оценки доступного пространства для парковки.
[0065] Затем на этапе S206 и этапе S207, модуль 505 оценки доступного пространства для парковки выполняет процесс оценки для доступного пространства 5 для парковки (см. фиг. 14). Во-первых, на этапе S206, модуль 505 оценки доступного пространства для парковки выбирает один или более наборов транспортных средств 3, которые являются ближайшими к рассматриваемому транспортному средству 1, и вычисляет расстояние W1 между транспортными средствами для смежных припаркованных транспортных средств 2 выбранных одного или более наборов транспортных средств 3. Затем на этапе S207, модуль 505 оценки доступного пространства для парковки определяет то, удовлетворяют или нет вычисленное расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 взаимосвязи вышеуказанного выражения (3). Когда положительное определение выполняется на этапе S207, процедура переходит к этапу S208, тогда как, когда отрицательное определение выполняется на этапе S207, процесс помощи при парковке завершается.
[0066] На этапе S208, модуль 505 оценки доступного пространства для парковки оценивает пространство, в котором расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют взаимосвязи вышеуказанного выражения (3), в качестве доступного пространства 5 для парковки, и выводит результат оценки в модуль 506 разделения доступного пространства для парковки. Затем на этапе S209, модуль 506 разделения доступного пространства для парковки разделяет доступное пространство 5 для парковки в направлении ширины на целое число n, представленное посредством вышеуказанного выражения (4), и выводит информацию относительно разделенного доступного пространства 5 для парковки в модуль 507 вычисления намеченных путей для парковки (см. фиг. 14). В случае n=1, разделение доступного пространства 5 для парковки вследствие этого не выполняется.
[0067] Затем этапы S112 и S113 выполняются идентично процессу помощи при парковке вышеописанного варианта осуществления. Процесс помощи при парковке в настоящем варианте осуществления в силу этого завершается.
[0068] В вышеописанной процедуре управления для процесса помощи при парковке, после того, как намеченный путь для парковки в доступное подпространство 6 для парковки вычисляется, операция парковки выполняется для того, чтобы завершать процесс помощи при парковке, но настоящее изобретение не ограничено этим, и процедура может возвращаться от этапа S113 к этапу S102, чтобы последовательно корректировать намеченный путь для парковки.
[0069] Как описано выше, в способе помощи при парковке и устройстве помощи при парковке согласно настоящему варианту осуществления, направления припаркованных транспортных средств 2, включенных в информацию распознавания из набора датчиков 10 дальности, обнаруживаются, и два или более транспортных средств группируются в набор транспортных средств 3 на основе обнаруженных направлений припаркованных транспортных средств 2. Через эту операцию, два или более припаркованных транспортных средств 2, припаркованных рядом вдоль полосы для проезда автомобильной парковки, могут группироваться в набор транспортных средств 3 как на автомобильной парковке со схемой парковки под прямым углом, так и на автомобильной парковке со схемой парковки под углом.
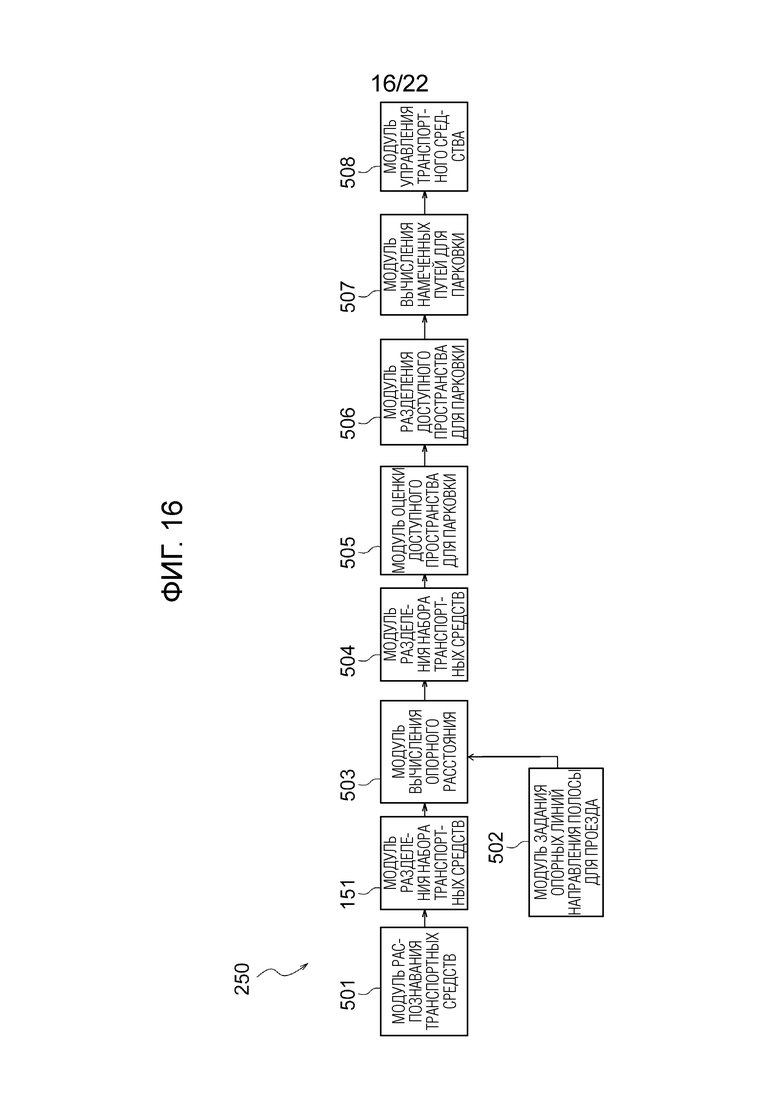
[0070] Фиг. 16 является блок-схемой для описания функций ECU 250 помощи при парковке согласно другому варианту осуществления настоящего изобретения. Как проиллюстрировано на чертеже, ECU 250 помощи при парковке содержит модуль 501 распознавания транспортных средств, модуль 151 разделения набора транспортных средств, модуль 502 задания опорных линий направления полосы для проезда, модуль 503 вычисления опорного расстояния, модуль 504 разделения набора транспортных средств, модуль 505 оценки доступного пространства для парковки, модуль 506 разделения доступного пространства для парковки, модуль 507 вычисления намеченных путей для парковки и модуль 508 управления транспортного средства. Описание функций, идентичных функциям ECU 50 помощи при парковке и 150 согласно вышеописанным вариантам осуществления, опускается, и описание вышеописанных вариантов осуществления заимствуется в данном документе.
[0071] Фиг. 17 является видом сверху для описания процесса группировки для набора транспортных средств 3. Как проиллюстрировано на чертеже, модуль 151 разделения набора транспортных средств группирует два или более припаркованных транспортных средств 2, которые имеют сравнимые направления (например, разность углов находится в пределах ±0-10°), в набор транспортных средств 3 и выводит информацию по набору транспортных средств 3 и двум или более припаркованным транспортным средствам 2, включенным в набор транспортных средств 3, в модуль 505 оценки доступного пространства для парковки. Здесь, как проиллюстрировано на фиг. 18, припаркованные транспортные средства 2, имеющие различные опорные расстояния X, могут смешиваться.
[0072] Фиг. 18 является видом сверху для описания процесса задания для опорной линии L направления полосы для проезда и процесса вычисления для опорных расстояний X. Модуль 502 задания опорных линий направления полосы для проезда задает опорную линию L направления полосы для проезда на полосе для проезда для рассматриваемого транспортного средства 1 и выводит опорную линию L направления полосы для проезда в модуль 503 вычисления опорного расстояния. Затем модуль 503 вычисления опорного расстояния вычисляет опорные расстояния X и относительные позиции припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда и выводит вычисленные опорные расстояния X и относительные позиции в модуль 504 разделения набора транспортных средств. При вычислении относительных позиций припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда, модуль 503 вычисления опорного расстояния указывает то, расположено каждое припаркованное транспортное средство 2 на правой стороне или на левой стороне относительно опорной линии L направления полосы для проезда.
[0073] Фиг. 19 является видом сверху для описания процесса разделения для набора транспортных средств 3. Модуль 504 разделения набора транспортных средств разделяет набор транспортных средств 3, в котором припаркованные транспортные средства 2, имеющие различные опорные расстояния X, смешиваются дополнительно на два или более наборов транспортных средств 3A на основе опорных расстояний X. В этом случае, опорные расстояния X припаркованных транспортных средств 2, включенных в каждый набор транспортных средств 3A, являются сравнимыми. Затем модуль 504 разделения набора транспортных средств выводит информацию относительно двух или более наборов транспортных средств 3A и припаркованных транспортных средств 2, включенных в каждый набор транспортных средств 3A, в модуль 505 оценки доступного пространства для парковки.
[0074] Фиг. 20 является видом сверху для описания процесса оценки для доступного пространства 5 для парковки. Во-первых, когда существует два или более наборов транспортных средств 3, модуль 505 оценки доступного пространства для парковки выбирает один или более наборов транспортных средств 3, которые являются ближайшими к рассматриваемому транспортному средству 1, из числа двух или более наборов транспортных средств 3. Затем модуль 505 оценки доступного пространства для парковки вычисляет расстояние W1 между транспортными средствами для смежных припаркованных транспортных средств 2 в выбранных одном или более наборов транспортных средств 3. После этого, когда вычисленное расстояние W1 между транспортными средствами и ширина W0 рассматриваемого транспортного средства 1 удовлетворяют взаимосвязи вышеуказанного выражения (3), модуль 505 оценки доступного пространства для парковки оценивает пространство, в котором расстояние W1 между транспортными средствами удовлетворяет взаимосвязи выражения (3), в качестве доступного пространства 5 для парковки и выводит результат оценки в модуль 506 разделения доступного пространства для парковки.
[0075] Фиг. 21 является видом сверху для описания процесса разделения для доступного пространства 5 для парковки. Модуль 506 разделения доступного пространства для парковки вычисляет то, соответствует или нет ширина W1 оцененного доступного пространства 5 для парковки превышению в n раз (n является целым числом) значения W2/cos α, как представлено посредством вышеуказанного выражения (4). Затем модуль 506 разделения доступного пространства для парковки разделяет доступное пространство 5 для парковки в направлении ширины (в направлении, параллельном направлению полосы для проезда) на целое число n, представленное посредством вышеуказанного выражения (4), и выводит информацию относительно разделенного доступного пространства 5 для парковки в модуль 507 вычисления намеченных путей для парковки.
[0076] Фиг. 22 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления для процесса помощи при парковке согласно настоящему варианту осуществления. В настоящем варианте осуществления, когда сигнал включения вводится из главного переключателя 40 в ECU 250 помощи при парковке, начинается процесс помощи при парковке, после чего выполняется этап S101.
[0077] Этапы S101, S102, S203, S204 и S205 выполняются идентично процессу помощи при парковке вышеописанных вариантов осуществления. Затем этап S104 выполняется идентично процессу помощи при парковке вышеописанного варианта осуществления. На этом этапе, модуль 502 задания опорных линий направления полосы для проезда задает опорную линию L направления полосы для проезда на полосе для проезда для рассматриваемого транспортного средства 1 и выводит опорную линию L направления полосы для проезда в модуль 503 вычисления опорного расстояния (см. фиг. 18). Затем на этапе S305, модуль 503 вычисления опорного расстояния вычисляет вышеуказанные опорные расстояния X и относительные позиции припаркованных транспортных средств 2 относительно опорной линии L направления полосы для проезда и выводит вычисленные опорные расстояния X и относительные позиции в модуль 504 разделения набора транспортных средств.
[0078] Затем на этапе S306 и этапе S307, модуль 504 разделения набора транспортных средств выполняет процесс разделения набора транспортных средств 3 (см. фиг. 19). Во-первых, на этапе S306, модуль 504 разделения набора транспортных средств определяет то, существует или нет набор транспортных средств 3, в котором припаркованные транспортные средства 2, имеющие различные опорные расстояния X, смешиваются. Когда положительное определение выполняется на этапе S306, процедура переходит к этапу S307, тогда как, когда отрицательное определение выполняется на этапе S306, процедура переходит к этапу S206.
[0079] На этапе S307, модуль 504 разделения набора транспортных средств разделяет набор транспортных средств 3, в котором припаркованные транспортные средства 2, имеющие различные опорные расстояния X, смешиваются дополнительно на два или более наборов транспортных средств 3A на основе опорных расстояний X. Затем модуль 504 разделения набора транспортных средств выводит информацию относительно наборов транспортных средств 3 и 3A и припаркованных транспортных средств 2, включенных в него, в модуль 505 оценки доступного пространства для парковки.
[0080] Затем этапы S206, S207, S208, S209, S112 и S113 выполняются. Процесс помощи при парковке в настоящем варианте осуществления в силу этого завершается.
[0081] В вышеописанной процедуре управления для процесса помощи при парковке, после того, как намеченный путь для парковки в доступное подпространство 6 для парковки вычисляется, операция парковки выполняется для того, чтобы завершать процесс помощи при парковке, но настоящее изобретение не ограничено этим, и процедура может возвращаться от этапа S113 к этапу S102, чтобы последовательно корректировать намеченный путь для парковки.
[0082] Как описано выше, в способе помощи при парковке и устройстве помощи при парковке согласно настоящему варианту осуществления, направления припаркованных транспортных средств 2, включенных в информацию распознавания из набора датчиков 10 дальности, обнаруживаются, и два или более транспортных средств группируются в набор транспортных средств 3 на основе обнаруженных направлений припаркованных транспортных средств 2. Кроме того, опорная линия L направления полосы для проезда, протягивающаяся вдоль полосы для проезда автомобильной парковки, задается, опорные расстояния X между опорной линией L направления полосы для проезда и припаркованными транспортными средствами 2, включенными в информацию распознавания, полученную из набора датчиков 10 дальности, вычисляются, и набор транспортных средств 3 разделяется на основе опорных расстояний X. Через эту операцию, как на автомобильной парковке со схемой парковки под прямым углом, так и на автомобильной парковке со схемой парковки под углом, набор транспортных средств 3, в котором припаркованные транспортные средства 2, имеющие различные расстояния от полосы для проезда, смешиваются, может разделяться на два или более наборов транспортных средств 3A, в каждом из которых расстояния от полосы для проезда являются практически идентичными.
[0083] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0084] Например, вышеприведенные варианты осуществления описываются при условии, что датчики дальности оснащены в рассматриваемом транспортном средстве, но настоящее изобретение не ограничено этим, и один или более вариантов осуществления настоящего изобретения могут выполняться при условии, что используются датчик, предоставленный на автомобильной парковке, датчик, предоставленный на другом транспортном средстве, и/или камера, носимая пользователем. В таких случаях, информация по набору парковочных рамок может получаться из внешнего мира, чтобы воспринимать состояние парковки в наборе парковочных рамок.
[0085] В вышеописанных вариантах осуществления, когда пространство, в котором расстояние между транспортными средствами для припаркованных транспортных средств 2 превышает ширину одного транспортного средства, существует между припаркованными транспортными средствами 2, включенными в набор транспортных средств 3, пространство оценивается в качестве доступного пространства 5 для парковки. В альтернативном варианте осуществления, когда пространство, в котором расстояние между транспортными средствами для припаркованных транспортных средств 2 превышает предварительно определенную ширину парковочной рамки, существует между припаркованными транспортными средствами 2, включенными в набор транспортных средств 3, пространство может оцениваться в качестве доступного пространства 5 для парковки.
[0086] В вышеописанных вариантах осуществления, когда в сгруппированном наборе транспортных средств 3 расстояние между транспортными средствами для припаркованных транспортных средств 2, расположенных с обеих сторон доступного пространства 5 для парковки, превышает значение, полученное посредством умножения предварительно определенной ширины парковочной рамки на целое число n, большее единицы, доступное пространство 5 для парковки разделяется на целое число n в направлении расстановки припаркованных транспортных средств 2 в наборе транспортных средств 3. В альтернативном варианте осуществления, когда в сгруппированном наборе транспортных средств 3 расстояние между транспортными средствами для припаркованных транспортных средств 2, расположенных с обеих сторон доступного пространства 5 для парковки, превышает значение, полученное посредством умножения предварительно определенной ширины транспортного средства на целое число n, большее единицы, доступное пространство 5 для парковки может разделяться на целое число n в направлении расстановки припаркованных транспортных средств 2 в наборе транспортных средств 3.
Описание номеров ссылок
[0087] 1 - рассматриваемое транспортное средство
2 - припаркованное транспортное средство
3 - набор транспортных средств
5 - доступное пространство для парковки
6 - доступное подпространство для парковки
50 - ECU помощи при парковке
60 - ECU управления транспортным средством
100 - устройство помощи при парковке
L - опорная линия направления полосы для проезда
X - опорное расстояние
Изобретение относится к автомобильной промышленности, более подробно к устройствам и способам, облегчающим парковку транспортных средств. Предлагаемый способ включает в себя получение информации распознавания относительно припаркованных транспортных средств (2), существующих на автомобильной парковке, извлечение двух или более транспортных средств (2), припаркованных рядом, из информации распознавания и группировку двух или более транспортных средств (2) в набор транспортных средств (3). Когда пространство, в которое возможна парковка, существует между припаркованными транспортными средствами (2), включенными в сгруппированный набор транспортных средств (3), производится оценка пространства в качестве доступного пространства для парковки (5). Дополнительно может быть предусмотрено задание опорной линии направления полосы для проезда, протягивающейся вдоль полосы для проезда автомобильной парковки, вычисление опорных расстояний между опорной линией направления полосы для проезда и припаркованными транспортными средствами (2), включенными в вышеуказанную информацию распознавания, и извлечение двух или более транспортных средств (2) из вышеуказанной информации распознавания и группировку двух или более транспортных средств (2) в набор транспортных средств (3) на основе вычисленных опорных расстояний. Технический результат – обеспечение парковки независимо от того, может или нет распознаваться сигнальная разметочная линия, представляющая парковочную рамку. 2 н. и 6 з.п. ф-лы, 22 ил.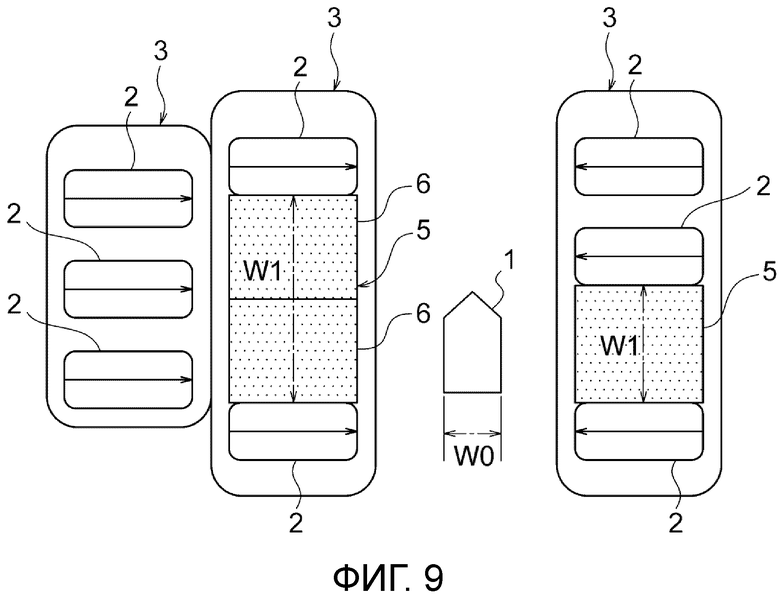
1. Способ помощи при парковке, содержащий этапы, на которых:
- получают информацию распознавания относительно припаркованных транспортных средств, существующих на автомобильной парковке;
- извлекают два или более транспортных средств, припаркованных рядом, из информации распознавания и группируют два или более транспортных средств в набор транспортных средств; и
- когда пространство, в которое возможна парковка, существует между припаркованными транспортными средствами, включенными в сгруппированный набор транспортных средств, оценивают пространство в качестве доступного пространства для парковки.
2. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
- задают опорную линию, протягивающуюся вдоль полосы для проезда автомобильной парковки;
- вычисляют расстояния между опорной линией и припаркованными транспортными средствами, включенными в информацию распознавания; и
- извлекают два или более транспортных средств из информации распознавания и группируют два или более транспортных средств в набор транспортных средств на основе вычисленных расстояний.
3. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
- обнаруживают направления припаркованных транспортных средств, включенных в информацию распознавания; и
- извлекают два или более транспортных средств из информации распознавания и группируют два или более транспортных средств в набор транспортных средств на основе обнаруженных направлений.
4. Способ помощи при парковке по п. 1, в котором, когда пространство, в котором расстояние между транспортными средствами для припаркованных транспортных средств превышает ширину одного транспортного средства или предварительно определенную ширину парковочной рамки, существует между припаркованными транспортными средствами, включенными в набор транспортных средств, пространство оценивается в качестве доступного пространства для парковки.
5. Способ помощи при парковке по п. 4, в котором, когда пространство, в котором длина в продольном направлении припаркованных транспортных средств превышает длину одного транспортного средства, существует между припаркованными транспортными средствами, включенными в набор транспортных средств, пространство оценивается в качестве доступного пространства для парковки.
6. Способ помощи при парковке по п. 4, в котором, когда расстояние между транспортными средствами для припаркованных транспортных средств, расположенных с обеих сторон доступного пространства для парковки, превышает значение, полученное посредством умножения предварительно определенной ширины парковочной рамки или ширины одного транспортного средства на целое число n, большее единицы, доступное пространство для парковки разделяется на целое число n в направлении расстановки припаркованных транспортных средств в наборе транспортных средств.
7. Способ помощи при парковке по любому из пп. 1-6, содержащий этапы, на которых:
- формируют намеченный путь для парковки в доступное пространство для парковки; и
- управляют рассматриваемым транспортным средством таким образом, что оно движется по намеченному пути для парковки.
8. Устройство помощи при парковке, содержащее контроллер помощи при парковке, имеющий функцию помощи при парковке, причем контроллер помощи при парковке выполнен с возможностью:
- получать информацию распознавания относительно припаркованных транспортных средств, существующих на автомобильной парковке;
- извлекать два или более транспортных средств, припаркованные рядом, из информации распознавания и группировать два или более транспортных средств в набор транспортных средств; и
- когда пространство, в которое возможна парковка, существует между припаркованными транспортными средствами, включенными в сгруппированный набор транспортных средств, оценивать пространство в качестве доступного пространства для парковки.
| JP 2013116698 A, 13.06.2013 | |||
| JP 2010012908 A, 21.01.2010 | |||
| US 8742947 B2, 03.06.2014 | |||
| УСТРОЙСТВО И СПОСОБ СОДЕЙСТВИЯ ПАРКОВКЕ | 2011 |
|
RU2525597C1 |

