Предлагаемое изобретение относится к гидроакустической технике и может быть использовано для точного преобразования спектра эхо-сигналов целей, обнаруженных активным гидролокатором, для их классификации на слух оператором активного гидролокатора.
Одной из основных задач гидролокатора является определение местоположения и курса целей и их классификация. Классификация типов целей в гидролокации заключается в установлении принадлежности обнаруженного эхо-сигнала цели к определенному типу целей, создающему этот эхо-сигнал. Звуковое представление выходной информации для оператора гидролокатора в совокупности с визуальным отображением с целью классификации обнаруженных целей весьма полезно и актуально (Alan A. Winder, UNDERWATER SOUND, Sonar system technology, IEEE TRANSAIXIONS ON SONICS AND ULTRASONICS, VOL. su-22, NO. 5, SEPTEMBER 1975, стр. 326…328, фиг. 30).
В гидролокаторах классификация целей основывается на анализе структуры и спектра эхо-сигналов, которые определяются условиями распространения и отражения акустических волн в гидроакустическом канале. Спектр эхо-сигнала цели в общем случае не совпадает со спектром зондирующего импульса и, как правило, занимает большую полосу частот. Полоса частот спектра эхо-сигнала цели может достигать десятка килогерц и быть далеко от области частот, слышимых человеком. Для классификации эхо-сигналов целей оператором на слух необходимо преобразовать их спектр таким образом, чтобы он находился в области частот от 1 кГц до 4 кГц, где человеческий слух обладает наибольшей чувствительностью к амплитудной модуляции.
Для обеспечения высокой разрешающей способности по дистанции при поиске малоразмерных целей в гидролокаторах в качестве зондирующих импульсов используют короткие импульсы длительностью от сотен микросекунд до единиц миллисекунд с частотным заполнением от единиц килогерц до сотен килогерц.
Известны методы решения задачи по преобразования спектра эхо-сигнала:
- перенос спектра,
- транспонирование спектра.
Первый метод заключается в сдвиге спектра по оси частот вниз на постоянную величину при сохранении его ширины и структуры либо с применением аналоговой обработки на основе аналоговых перемножителей сигналов (Тимонтеев В.Н. и др. Аналоговые перемножители сигналов в радиоэлектронной аппаратуре. М., Радио и связь, 1982 г., стр. 6, стр. 32…33, рис. 2.16), либо с применением цифровой обработки на основе метода БПФ (Сергиенко А.Б. Применение цифровой обработки сигналов. СПб.: Питер, 2002 г., стр. 256…262).
Второй метод заключается в пропорциональном растяжении эхо-сигнала во времени в к раз, что эквивалентно пропорциональному сжатию спектра в частотной области тоже в к раз без изменения структуры спектра (Анташев А.Б. Транспонирование частотного спектра сигнала и его корреляционная обработка. УДК621.396:535.853. Изв. ВУЗОВ, Приборостроение, 2008 г., т. 51, N3).
Первый метод не приемлем, так как длительности исходного и преобразованного эхо-сигналов одинаковы и их спектры по ширине равны, и к тому же для распознавания на слух длительности их (единицы миллисекунд) неприемлемо малы, так как такие эхо-сигналы воспринимаются на слух как короткие щелчки, не имеющие частотной окраски, и также при переносе спектра на оптимальную для слуха несущую частоту 1…4 кГц невозможно передать тонкую структуру их огибающей. При использовании этого метода в спектре преобразованного эхо-сигнала появляются существенные искажения, что неприемлемо при классификации целей на слух.
Второй метод - транспонирование - позволяет с высокой точностью изменять ширину спектра исходного эхо-сигнала либо аналоговым, либо цифровым способом, причем цифровым способом более просто, удобно и гибко при сохранении высокой точности преобразования. Сущность метода состоит в том, что запись огибающей исходного эхо-сигнала на носитель (аналоговый или цифровой) происходит в реальном масштабе времени, а ее восстановление - в растянутом в n раз масштабе, при этом огибающая транспонированного эхо-сигнала растягивается во времени в n-раз, а спектр ее в n-раз сжимается. Но простого транспонирования спектра для задачи классификации эхо-сигналов, используемых в гидролокаторах, на слух недостаточно, так как первоначально необходимо выделить исходный спектр эхо-сигнала, а затем перенести его на новую несущую частоту в диапазоне от 1 кГц до 4 кГц, где слух человека обладает наибольшей чувствительностью.
Известна гидролокационная система RAYTHEON DE/1160-AN/SQS-56 с двухканальным приемником звуковых сигналов, которая в активном режиме обнаруживает подводные цели, определяет их координаты и производит их прослушивание (под редакцией Э. Оппенгейма, М.: «Мир», 1980 г., стр. 428…433., рис. 6.23а, б), содержащая приемопередающую антенную систему, коммутатор приема-передачи, генераторное устройство зондирующего сигнала с формирователем диаграммы направленности в излучении и усилителем мощности, независимые тракты: тракт приема и обнаружения активного режима, тракт приема и обнаружения пассивного режима со своим формирователем диаграммы направленности, тракт сопровождения, тракт сигналов прослушивания и цифровую вычислительную машину с пультом оператора, дисплеем и периферийными устройствами. В этой гидролокационной системе формирование веера диаграмм направленности в режиме приема производится цифровым способом путем задержки, умножения на весовые коэффициенты и суммирования, причем за длительность зондирующего импульса при АЦП преобразовании берется всего две выборки. Для организации канала прослушивания используется метод переноса спектра эхо-сигнала, при этом спектр огибающей эхо-сигнала переносится в область нулевых частот и выводится через двухканальный приемник звуковых сигналов на динамик для прослушивания оператором, при этом ширина спектра эхо-сигнала не изменяется. В результате спектр преобразованных эхо-сигналов от малоразмерных целей искажается, так как невозможно "описать" тонкую структуру огибающей эхо-сигнала малым количеством выборок при АЦП преобразовании. В результате они представляют собой на слух короткие щелчки, которые невозможно классифицировать вследствие чрезвычайно низкой чувствительности человеческого уха в районе нулевых частот (Э. Цвикер. Ухо как приемник информации. М.: Связь, 1971 г., стр. 12, стр. 64, рис, 18.3, стр. 86, рис. 28.1, 28.2).
Наиболее близким аналогом, выбранным за прототип, к заявленному изобретению по структуре является навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО), выполненная по патенту RU 2225991, G01S 15/00, опубл. 24.03.2004 г. и содержащая приемопередающую двухмерную антенную систему, соединенную через коммутатор приема-передачи с трактом предварительной обработки, генераторное устройство, выходы которого подключены ко входам коммутатора приема-передачи, и первую цифровую вычислительную систему (ЦВС 1), соединенную с выходами тракта предварительной обработки двумя параллельными интерфейсами, вторую цифровую вычислительную систему (ЦВС 2), тракт измерения скорости звука в морской воде (ИСЗ) и цифроаналоговый тракт прослушивания, причем два выхода ЦВС 1 соединены с двумя входами ЦВС 2, третий выход ЦВС 1 подключен к цифроаналоговому тракту прослушивания, третий вход ЦВС 2 соединен с трактом ИСЗ, ЦВС 2 подключена к тракту предварительной обработки, выход управления ЦВС 2 подключен к управляющему входу генераторного устройства, остальные выходы ЦВС 2 являются выходами на периферийные устройства, а тракт предварительной обработки выполнен в виде многоканального тракта комплексной предварительной обработки и содержит последовательно соединенные усилительное устройство, квадратурный демодулятор, аналого-цифровой преобразователь, уплотнитель данных и контроллер, подключенный ко всем входящим в тракт предварительной обработки блокам.
В НГАС ОБО формирование в приеме статистического веера характеристик направленности в вертикальной плоскости и горизонтальной плоскости производится цифровым способом, в частности, для горизонтальной плоскости в частотной области путем быстрого преобразования Фурье. Спектр сформированной диаграммы направленности переносится в район нулевой частоты для перевода во временную область и передачу на цифроаналоговый тракт прослушивания для прослушивания оператором. При этом спектр преобразованного эхо-сигнала расположен в районе нулевой частоты, а ширина спектра преобразованного эхо-сигнала равна ширине спектра исходного эхо-сигнала цели. НГАС ОБО использует короткие зондирующие импульсы для обеспечения хорошей разрешающей способности по дистанции при обнаружении малоразмерных целей. При переносе их спектра в район нулевой частоты вследствие их небольшой длительности они воспринимаются на слух как раздражающие щелчки, не имеющие частотной "окраски", по которым невозможно достоверно классифицировать цель (Э. Цвикер. Ухо как приемник информации. М.: Связь, 1971 г., стр. 64, рис, 18.3., стр. 197…199, рис. 73.1.).
Недостатком этой навигационной гидроакустической станции освещения ближней обстановки является то, что она не позволяет оптимально и без искажений для задачи классификации цели преобразовать спектр исходного эхо-сигнала цели к виду, к которому наиболее чувствителен слух оператора.
Задача предлагаемого изобретения состоит в точном преобразовании спектра эхо-сигнала и удобном его представлении для оператора гидролокатора в виде выходной звуковой информации, обеспечивающем повышение достоверности классификации целей на слух.
Технический результат предлагаемого изобретения заключается в точном преобразовании спектра эхо-сигнала цели гидролокатора к виду, наиболее удобному для восприятия оператором для классификации эхо-сигналов на слух.
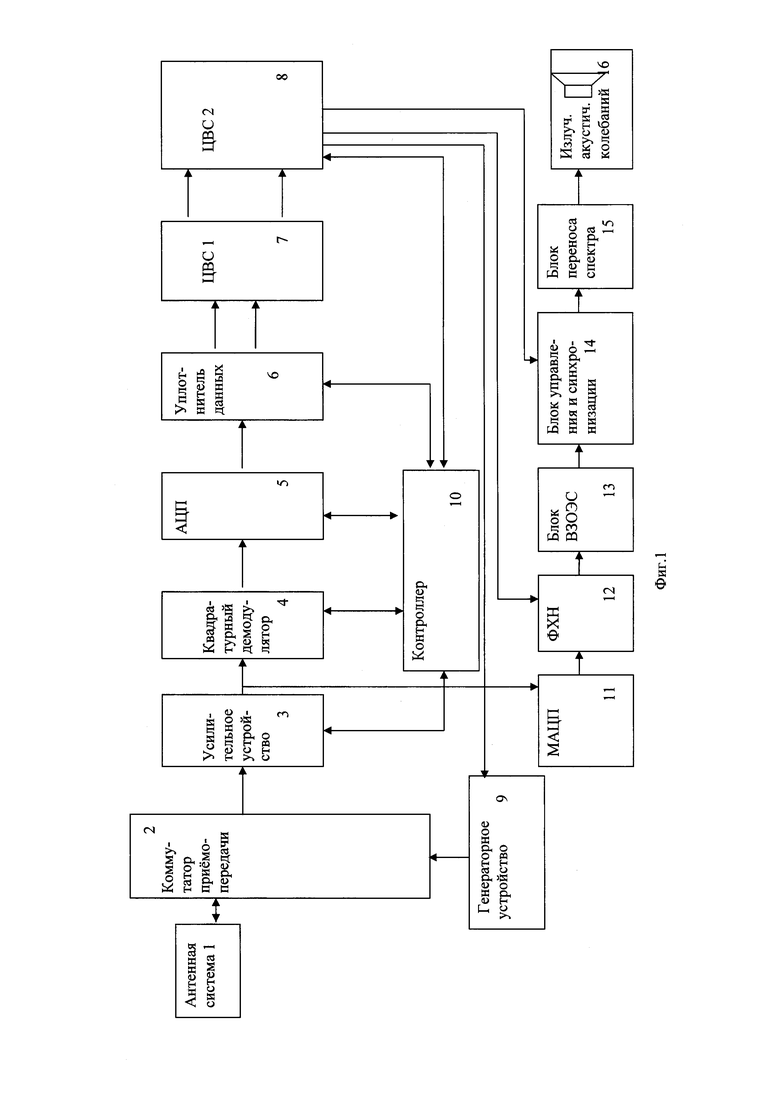
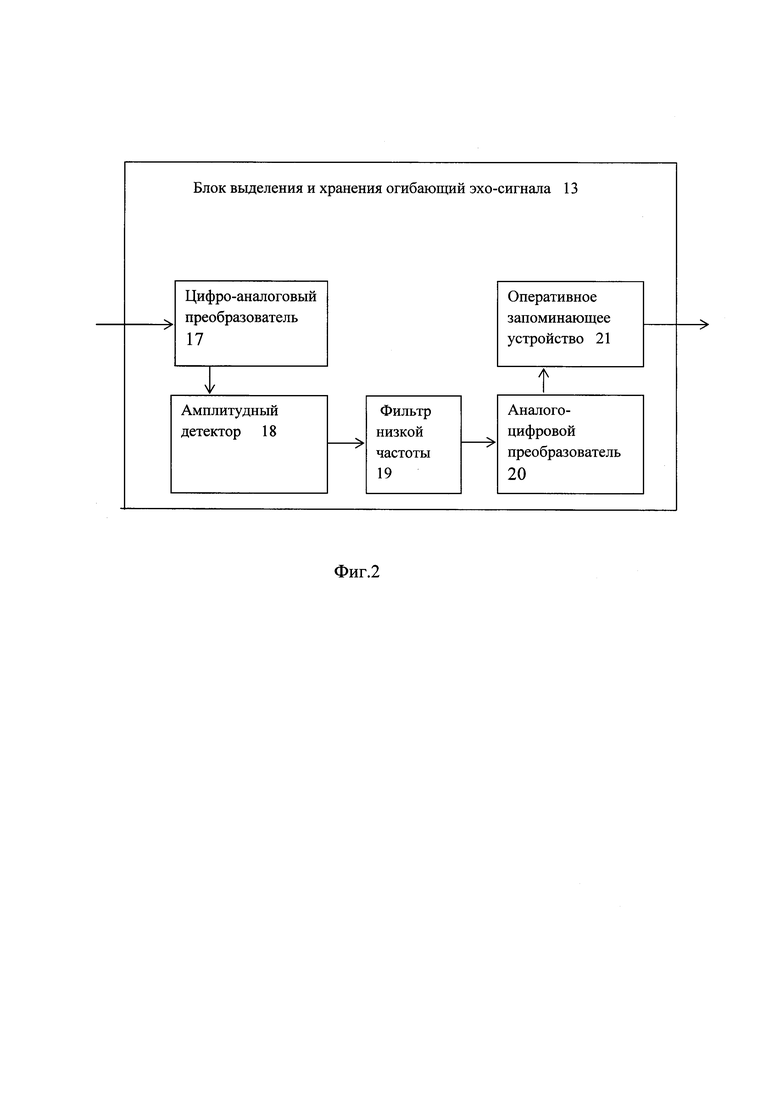
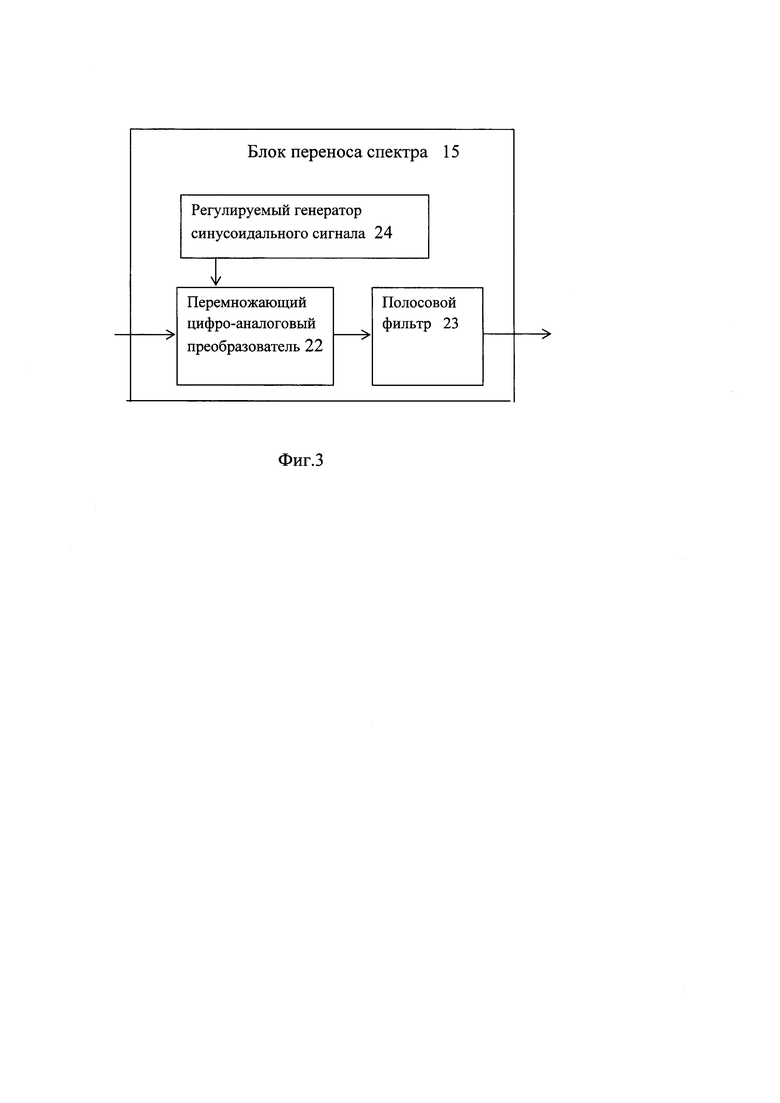
Для обеспечения указанного технического результата в гидролокатор с трактом прослушивания эхо-сигналов, содержащий двумерную приемопередающую антенную систему, подсоединенную через коммутатор приема-передачи к последовательно соединенным усилительному устройству, квадратурному демодулятору, аналого-цифровому преобразователю, уплотнителю данных, контроллер, подключенный к усилительному устройству, квадратурному демодулятору, аналого-цифровому преобразователю, уплотнителю данных, генераторное устройство, выходы которого подключены к входам коммутатора приема-передачи и первую цифровую вычислительную систему (ЦВС 1), соединенную с выходами уплотнителя данных, вторую цифровую вычислительную систему (ЦВС 2), причем два выхода ЦВС 1 соединены с двумя входами ЦВС 2, ЦВС 2 подключена к контроллеру, выход управления ЦВС 2 подключен к управляющему входу генераторного устройства, в него введены новые признаки, а именно: последовательно соединенные многоканальный аналого-цифровой преобразователь, входы которого подключены к выходам усилительного устройства, формирователь характеристики направленности, причем вход ввода угла направления на цель подключен к выходу ЦВС 2, блок выделения и хранения огибающей эхо-сигнала цели, блок управления и синхронизации, причем вход ввода дистанции до выбранной цели подключен к другому выходу ЦВС 2, блок переноса спектра эхо-сигнала цели, излучатель акустических колебаний, причем блок выделения и хранения огибающей эхо-сигнала цели включает последовательно соединенные цифроаналоговый преобразователь, вход которого является входом блока выделения и хранения огибающей эхо-сигнала, амплитудный детектор, фильтр низкой частоты, аналого-цифровой преобразователь, оперативное запоминающее устройство, выход которого является выходом блока выделения и хранения огибающей эхо-сигнала, а блок переноса спектра включает в себя последовательно соединенные умножающий четырехквадрантный цифроаналоговый преобразователь, цифровые входы которого являются входом блока переноса спектра, и полосовой фильтр, выход которого является выходом блока переноса спектра, к опорному входу умножающего четырехквадрантного цифроаналогового преобразователя подключен выход регулируемого по частоте генератора синусоидального напряжения.
Введение новых блоков и связей позволяет обеспечить заявленный технический результат путем точного транспонирования спектра эхо-сигнала цели на новую несущую частоту, где слух оператора наиболее чувствителен к амплитудной модуляции и имеет максимальное разрешение по частоте.
Сущность изобретения поясняется фиг. 1, фиг. 2 и фиг. 3, при этом на фиг. 1 приведена блок-схема заявляемого гидролокатора, на фиг. 2 - блок выделения и хранения огибающей эхо-сигнала, на фиг. 3 - блок переноса спектра.
Заявленный гидролокатор с трактом прослушивания эхо-сигналов (фиг. 1) содержит:
1 - антенную систему
2 - коммутатор приема-передачи
3 - усилительное устройство
4 - квадратурный демодулятор
5 - аналого-цифровой преобразователь
6 - уплотнитель данных
7 - первую цифровую вычислительную систему (ЦВС 1)
8 - вторую цифровую вычислительную систему (ЦВС 2)
9 - генераторное устройство
10 - контроллер
11 - многоканальный аналого-цифровой преобразователь (МАЦП)
12 - формирователь характеристики направленности (ФХН)
13 - блок выделения и хранения огибающей эхо-сигнала цели (ВХОЭС)
14 - блок управления и синхронизации (БУС)
15 - блок переноса спектра (БПС)
16 - блок излучателя акустических колебаний (БИЗ)
Блок выделения и хранения огибающей эхо-сигнала цели (ВХОЭС) 13 (фиг. 2) содержит:
17 - цифроаналоговый преобразователь
18 - амплитудный детектор
19 - фильтр низкой частоты
20 - аналого-цифровой преобразователь
21 - оперативное запоминающее устройство
Блок переноса спектра 15 (фиг. 3) содержит:
22 - умножающий четырехквадрантный цифроаналоговый преобразователь
23 - полосовой фильтр
24 - регулируемый генератор синусоидального напряжения
Антенная система 1 представляет собой двумерную фазированную антенную решетку из K×N акустических преобразователей (Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. Л.: Судостроение, 1982, стр. 74-82).
Коммутатор приема-передачи 2 может быть выполнен по диодно-трансформаторной схеме вместе с предварительными усилителями (Колчеданцев А.С. Гидроакустические станции. Л.: Судостроение, 1982., стр. 69-73).
Усилительное устройство 3, которое может быть выполнено на микросхеме усилителя AD600 - усилителя с коэффициентом усиления, изменяемым напряжением, в диапазоне от 0 до 80 дБ, квадратурный демодулятор 4 может быть выполнен на ИМС AD734 - четырехквадрантного перемножителя сигналов и генератора напряжения с двумя выходами, сдвинутыми по фазе на 90 град., в качестве аналого-цифровой преобразователя 5 может использоваться ИМС АЦП ADAS3023 8-канальное 16-разрядное АЦП с одновременной выборкой и быстродействием 8 мкс/8 каналов, в качестве уплотнителя данных 6 и контроллера 10 может быть использован микроконтроллер с периферийными устройствами и с быстродействующим интерфейсом, например, Gigabit Ethernet.
Генераторное устройство 9 содержит генератор зондирующего сигнала, устройство формирования и сканирования характеристики направленности в секторе обзора и усилители мощности и выполнено традиционно (Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. Л.: Судостроение, 1982, стр. 91-99].
ЦВС1 7 представляют собой совокупность универсальных и специальных процессоров и имеет структуру многопроцессорной ЭВМ цифровой обработки сигналов.
ЦВС2 8 представляют собой универсальную управляемую ЭВМ управления, обработки видеоизображения с возможностью формирования информации на 2 мониторах и интерфейсами обмена с внешними системами.
МАЦП 11 представляет собой совокупность микросхем АЦП с одновременной выборкой и с временем преобразования меньшим, чем 1/(2*(Fизл+ΔF), например, ИМС АЦП ADAS3023 8-канальное 16-разрядное АЦП с одновременной выборкой и быстродействием 8 мкс/8 каналов.
ФХН 12 представляет собой формирователь во временной области с задержкой и суммированием, выполненный с применением цифровых методов (Корякин Ю.А. Корабельная гидроакустическая техника. СПб.: Наука, 2004 г., стр. 240…245, рис. 8.2.).
Блок ВХОЭС 13 представляет собой последовательно соединенные одноканальный цифроаналоговый преобразователь 17, активный двухполупериодный выпрямитель 18 на основе операционных усилителей, активный фильтр низкой частоты 19 на основе операционных усилителей, одноканальное n-разрядное АЦП 20 с частотой преобразования не менее чем вдвое выше максимальной частоты в спектре транспонированного эхо-сигнала, оперативное запоминающее устройство 21 необходимой емкости для хранения массива n-разрядных слов, представляющих собой огибающую эхо-сигнала в сформированной ХН блоком ФХН, например, выполненное на ИМС статического ОЗУ типа 900РУ6У - 256 кслов*16 разрядов.
Блок управления и синхронизации 14 (БУС) представляет собой микроконтроллер с набором интерфейсов и периферийных устройств, который осуществляет синхронную работу n-разрядного АЦП 20, оперативного запоминающего устройства 21 и выдачу массива n-разрядных слов, представляющих собой огибающую эхо-сигнала в блок переноса спектра 15.
Блок переноса спектра 15 (БПС) представляет собой последовательно включенные n-разрядный умножающий четырехквадрантный цифроаналоговый преобразователь 22, например, ИМС ЦАП AD7945 – 12-разрядный, на цифровые входы которого поступают из оперативного запоминающего устройства массив n-разрядных слов, а на опорный вход подается новая несущая частота от регулируемого по частоте генератора синусоидального напряжения 24, выполненного на основе операционных усилителей по схеме моста Вина (Алексенко А.Г. и др. Применение прецизионных аналоговых микросхем. М.: Радио и связь, 1985 г., стр. 135, рис. 4.6), и полосовой фильтр 23, например, выполненный на ИМС МАХ274 – 8-полюсный активный фильтр.
Блок излучателя акустических колебаний (БИЗ) 16 может представлять собой либо громкоговоритель, либо наушники, позволяющие воспроизводить спектр транспонированного эхо-сигнала без искажений.
Предлагаемый гидролокатор с трактом прослушивания эхо-сигналов работает следующим образом.
Первоначально производится запуск от ЦВС 2 8 генераторного устройства 9, которое через коммутатор приема-передачи 2 подает зондирующий импульс с частотным заполнением Fиз на антенную систему 1. Происходит облучение заданного сектора обзора и далее прием отраженных эхо-сигналов антенной системой 1. Далее усиленные эхо-сигналы с выходов блока 3 через квадратурный демодулятор 4, АЦП 5, уплотнитель данных 6 поступают в ЦВС1 7, где производится формирование статистического веера характеристик направленности в вертикальной плоскости (ВП) и горизонтальной плоскости (ГП), а также согласованная фильтрация, предварительная обработка со стационаризацией эхо-сигналов по дистанции, адаптивное формирование порогов обнаружения и далее обнаружение целей, измерение координат обнаруженных отметок (целей), формирование индикаторных массивов гидроакустической информации и отображение их на дисплее ЦВС 2. Одновременно усиленные, отфильтрованные и сжатые по динамическому диапазону, принятые эхо-сигналы антенной системы 1 с выходов усилительного устройства 3 поступают на входы МАЦП 11. Период преобразования Тпр в МАЦП 11 выбирается из условия неискажения спектра эхо-сигнала
Тпр≤1/(2*Fmax),
где Fmax - максимальная частота в спектре эхо-сигнала, которая равна
Fmax=Fиз+(1/τ),
где τ - длительность зондирующего импульса в пространственный канал сформированного статического веера характеристики направленности в приеме. Очевидно, что разрядность МАЦП 11 должна обеспечивать высокую точность преобразования эхо-сигнала. Разрядность В МАЦП 11 определяется допустимым уровнем шума и динамическим диапазоном амплитуды эхо-сигнала D
D=20*log(2B).
Так как система временной автоматической регулировки усиления сжимает динамический диапазон исходного эхо-сигнала, то обычно 10 разрядов АЦП достаточно, однако желательно добавить еще 2 защитных разряда для минимизации шумов квантования АЦП, при этом оператор меньше утомляется.
Оператор анализирует индикаторный массив гидроакустической информации, представленный на дисплее ЦВС 2 8, выбирает в каком-либо пространственном канале цель для прослушивания. ЦВС2 8 передает в ФХН 12 угол направления на выбранную цель и в блок управления и синхронизации 14 дистанция до нее, в результате в направлении этого угла ФХН 12 формирует одна ХН. Далее из ФХН 12 массив цифровых данных, представляющий собой эхо-сигнал в сформированной ХН, передается в блок ВХОЭС 13, где он преобразуется ЦАП 17 в аналоговую форму, детектируется амплитудным детектором 18, фильтруется фильтром низкой частоты 19 с частотой среза 1/τ, преобразуется АЦП 20 в цифровую форму с периодом Тзап:
Тзап≤1/(2*τ).
Далее цифровой массив В-разрядных слов, представляющий собой огибающую эхо-сигнала в сформированной ХН в ФХН 12, запоминается в оперативном запоминающем устройстве (ОЗУ) 21, входящем в блок ВХОЭС 13. Затем БУС 14 начинает процесс чтения из ОЗУ 21 цифрового массива В-разрядных слов с периодом Тчт с дистанции, значение которой уже передано из ЦВС2 8, в течение времени строба по дистанции, и передает его в БПС 15.
Значение времени строба по дистанции выбирается исходя из максимального размера целей, которые подлежат прослушиванию, и его не следует выбирать большим, так как время прослушивания эхо-сигнала возрастает вследствие того, что период чтения Тчт из ОЗУ 21 значительно больше периода записи Тзап в него. Коэффициент транспонирования спектра эхо-сигнала Ктр определяется отношением
Ктр=Тчт/Тзап.
Таким образом, длительность транспонированного эхо-сигнала увеличивается в Ктр раз, а его спектр при этом сжимается тоже в Ктр раз, и ширина его ΔF составит
ΔF=(1/τ)/Ктр.
Выбор Ктр определяется исходя из психоакустических факторов восприятия на слух транспонированных эхо-сигналов, при этом согласно графикам (Э. Цвикер. Ухо как приемник информации. М.: Связь, 1971 г., стр. 195, рис. 72.2, стр. 196, рис, 72.3, стр. 198, рис. 73.1). Ктр следует выбирать из условия, чтобы длительность транспонированного эхо-сигнала цели Ттр была в пределах от 100 мс до 300 мс и определяется отношением
Ктр=Ттр/τ,
где τ - время излучения зондирующего импульса в направлении одной ХН из статического веера сформированных ХН, τ определяется задачами, решаемыми конкретным гидролокатором. БПС 15 состоит из последовательно включенных В-разрядного умножающего четырехквадрантного цифроаналогового преобразователя (ЦАП) 22 и активного полосового фильтра 23. Цифровые входы ЦАП 22 подсоединены к выходам блока 14, а на его опорный вход от генератора 24 поступает новая несущая частота - синусоидальное напряжение частотой Fпр, для транспонирования спектра эхо-сигнала цели в район частот, где слух имеет наибольшую чувствительность к амплитудной модуляции. Согласно графикам (Э. Цвикер. Ухо как приемник информации. М.: Связь, 1971 г., стр. 64, рис. 18.3, стр. 76, рис, 24.1). Fпр следует выбирать от 1 кГц до 4 кГц в зависимости от индивидуальных особенностей слуха конкретного оператора гидролокатора путем перестройки частоты генератора 24. На этих частотах на слух оператор может успешно следить за всеми изменениями амплитуды огибающей транспонированного эхо-сигнала цели и запоминать эхо-сигнал на слух.
Далее транспонированный эхо-сигнал от цели с ЦАП 22 поступает на вход фильтра 23, подвергается полосовой фильтрации с центральной частотой Fпр и полосой ±ΔF для устранения эффекта наложения спектров и поступает на вход излучателя акустических колебаний 16, например, громкоговоритель, воспроизводящий без искажений полосу частот от Fпр-ΔF до Fпр+ΔF и далее воздействует на слух оператора.
После окончания прослушивания эхо-сигнала цели оператор может выбрать для прослушивания либо другую цель по картине отображения гидроакустической информации на дисплее на ЦВС2 8, либо продолжить многократно прослушивать ранее выбранную цель.
Исходя из вышеизложенного следует, что гидролокатор с трактом прослушивания эхо-сигналов обеспечивает неискаженное транспонирование спектра эхо-сигнала цели на новую несущую частоту, где слух оператора наиболее чувствителен к амплитудной модуляции и имеет максимальное разрешение по частоте, что увеличивает достоверность классификации эхо-сигналов целей на слух оператором.
Таким образом, технический результат предлагаемого изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ПОДВОДНОЙ ЛОДКИ | 2004 |
|
RU2281528C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2585401C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морской цели | 2023 |
|
RU2810699C1 |
| Гидроакустический способ управления торпедой | 2017 |
|
RU2649675C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР С ПОВЫШЕННЫМ РАЗРЕШЕНИЕМ ПО ДАЛЬНОСТИ | 2023 |
|
RU2802295C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2013 |
|
RU2534731C1 |
| СПОСОБ КЛАССИФИКАЦИИ ЭХО-СИГНАЛА ГИДРОЛОКАТОРА | 2011 |
|
RU2466419C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР ГЛУБОКОВОДНОГО НОСИТЕЛЯ | 2019 |
|
RU2699938C1 |
| Эхолот | 2022 |
|
RU2789812C1 |
Гидролокатор с трактом прослушивания эхо-сигналов относится к гидроакустической технике и может быть использован для точного преобразования спектра эхо-сигналов целей, обнаруженных активным гидролокатором, и их классификации на слух оператором гидролокатора. Задача предлагаемого изобретения состоит в точном преобразовании спектра эхо-сигнала и удобном его представлении для оператора гидролокатора в виде выходной звуковой информации, обеспечивающем повышение достоверности классификации целей на слух. Технический результат предлагаемого изобретения заключается в точном преобразовании спектра эхо-сигнала цели гидролокатора к виду, наиболее удобному для восприятия оператором для классификации эхо-сигналов на слух. Для обеспечения указанного технического результата в него введены многоканальный аналого-цифровой преобразователь, формирователь характеристики направленности, блок выделения и хранения огибающей эхо-сигнала цели, блок управления и синхронизации, блок переноса спектра эхо-сигнала цели, излучатель акустических колебаний, причем блок переноса спектра состоит из умножающего четырехквадратного цифро-аналогового преобразователя и регулируемого по частоте генератора синусоидального напряжения. 3 ил.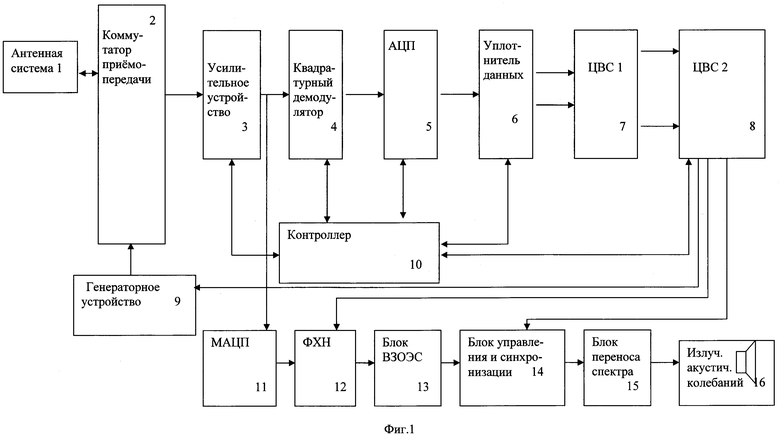
Гидролокатор с трактом прослушивания эхо-сигналов, содержащий двумерную приемопередающую антенную систему, подсоединенную через коммутатор приема-передачи к последовательно соединенным усилительному устройству, квадратурному демодулятору, аналого-цифровому преобразователю, уплотнителю данных, контроллер, подключенный к усилительному устройству, квадратурному демодулятору, аналого-цифровому преобразователю, уплотнителю данных, генераторное устройство, выходы которого подключены к входам коммутатора приема-передачи, и первую цифровую вычислительную систему (ЦВС 1), соединенную с выходами уплотнителя данных, вторую цифровую вычислительную систему (ЦВС 2), причем два выхода ЦВС 1 соединены с двумя входами ЦВС 2, ЦВС 2 подключена к контроллеру, выход управления ЦВС 2 подключен к управляющему входу генераторного устройства, отличающийся тем, что в него введены последовательно соединенные многоканальный аналого-цифровой преобразователь, входы которого подключены к выходам усилительного устройства, формирователь характеристики направленности, причем вход ввода угла направления на цель подключен к выходу ЦВС 2, блок выделения и хранения огибающей эхо-сигнала цели, блок управления и синхронизации, причем вход ввода дистанции до выбранной цели подключен к другому выходу ЦВС 2, блок переноса спектра эхо-сигнала цели, излучатель акустических колебаний, причем блок выделения и хранения огибающей эхо-сигнала цели включает последовательно соединенные цифроаналоговый преобразователь, вход которого является входом блока выделения и хранения огибающей эхо-сигнала, амплитудный детектор, фильтр низкой частоты, аналого-цифровой преобразователь, оперативное запоминающее устройство, выход которого является выходом блока выделения и хранения огибающей эхо-сигнала, а блок переноса спектра включает в себя последовательно соединенные умножающий четырехквадрантный цифроаналоговый преобразователь, цифровые входы которого являются входом блока переноса спектра, и полосовой фильтр, выход которого является выходом блока переноса спектра, к опорному входу умножающего четырехквадрантного цифроаналогового преобразователя подключен выход регулируемого по частоте генератора синусоидального напряжения.
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| СПОСОБ КЛАССИФИКАЦИИ ЭХО-СИГНАЛА ГИДРОЛОКАТОРА | 2011 |
|
RU2466419C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР С КЛАССИФИКАЦИЕЙ ОБЪЕКТА | 2013 |
|
RU2528114C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2528113C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ УГЛЕВОДСОДЕРЖАЩЕГО ЖЕЛИРУЮЩЕГО КОНЦЕНТРАТА ДЛЯ КОНДИТЕРСКИХ ИЗДЕЛИЙ | 2003 |
|
RU2251310C2 |

