Изобретение относится к технике связи и может быть использовано в системах передачи данных с адаптивной коррекцией сигналов для выбора параметра алгоритма коррекции.
Во многих системах передачи данных для компенсации искажений, внесенных каналом связи, применяют алгоритмы адаптивной коррекции сигналов. Для этого в передаваемый сигнал осуществляют периодические вставки известного на приемной стороне тестового сигнала. Такой подход используется, например, в стандарте авиационной передачи данных ARINC-635 [1].
Известно большое количество различных методов, алгоритмов и их модификаций, используемых для коррекции сигналов, например метод наименьших квадратов или алгоритм LMS [2], алгоритм RLS [3], метод регуляризации Тихонова [4]. Во всех этих и многих других алгоритмах для обеспечения устойчивости и сходимости вводят некоторый параметр, в частности параметр регуляризации (алгоритм RLS, метод регуляризации Тихонова), размер шага сходимости (алгоритм LMS). Выбор того или иного параметра оказывает существенное влияние не только на устойчивость решения, но и на вероятность ошибки на бит после демодуляции откорректированного сигнала, т.е. на помехоустойчивость.
Как известно, задача адаптивной коррекции сводится к решению двух уравнений, которые можно записать в следующей форме:


где K(t) - передаваемый тестовый сигнал, u(t) - принимаемый тестовый сигнал, Km(t) - передаваемый информационный сигнал, um(t) - принимаемый информационный сигнал, h(t) - импульсная характеристика канала, * - оператор свертки.
Из уравнения (1) получают приближенную импульсную характеристику канала в общем случае в виде:

а результат коррекции в этом случае можно записать в виде:

где R{} - некоторый алгоритм расчета, α1, α2 - параметры, используемые для устойчивости алгоритма. Отметим, что в большинстве практических случаев допустимо принять:

тогда вместо (5) запишем:

Известны различные способы выбора оптимального значения этого параметра.
Наиболее близким к заявленному техническому решению является способ невязки, описанный в [5]. Этот способ часто применяют для выбора параметра регуляризации в методе регуляризации Тихонова. В условиях (3) (6) способ невязки заключается в том, что, используя алгоритм R{} на основе поступившего тестового сигнала u0(t), рассчитывают импульсную характеристику канала h(t,α) и корректирующего фильтра hкоp(t,α), с помощью которой, используя некоторый алгоритм R{}, корректируют поступивший информационный сигнал um(t), в результате чего получают откорректированный информационный сигнал Km(t,α), после чего определяют значение ошибки е, в качестве которой служит разница среднеквадратичного уклонения откорректированного информационного сигнала Km(t,α), свернутого с рассчитанной импульсной характеристикой канала h(t,α), от принятого информационного сигнала um(t) и дисперсии шумовой составляющей Δu, т.е.  , после чего определяют зависимость значения ошибки е от параметра α путем изменения значения этого параметра, в результате чего получают оптимальное значение параметра αopt, обеспечивающего минимальное значение ошибки е.
, после чего определяют зависимость значения ошибки е от параметра α путем изменения значения этого параметра, в результате чего получают оптимальное значение параметра αopt, обеспечивающего минимальное значение ошибки е.
Недостатком прототипа является необходимость знания определенной априорной информации, а именно дисперсии шумовой составляющей, оценка которой является отдельной достаточно сложной задачей и имеет определенную погрешность. Кроме того, при вычислении значения ошибки е вносится дополнительная погрешность при свертке приближенных (рассчитанных) значений Km(t,α) и h(t,α).
Целью изобретения является выбор оптимального параметра алгоритма коррекции сигналов без знания априорной информации и без внесения дополнительной погрешности, т.е. увеличение точности оценки αopt.
Поставленная цель достигается тем, что способ адаптивного выбора оптимального параметра алгоритма коррекции сигналов, заключающийся в том, что, используя алгоритм R{} на основе поступившего тестового сигнала u0(t), рассчитывают импульсную характеристику корректирующего фильтра hкор(t,α), отличающийся тем, что с помощью импульсной характеристики корректирующего фильтра hкop(t,α), используя алгоритм R{}, корректируют поступившие тестовые сигналы u1(t)…un(t), задержанные на интервал, равный длине информационного сигнала LИ, в результате чего получают откорректированные тестовые сигналы K1(t,α)…Kn(t,α), определяют значения ошибки е1…еn, в качестве которой служит среднеквадратичное уклонение откорректированного тестового сигнала K1(t,α)…Kn(t,α) от образцового тестового сигнала K(t), т.е.  , j=1…n, после чего определяют зависимость значения ошибки е1…еn от параметра α путем изменения значения этого параметра, в результате чего получают массив значений параметров α1…αn, обеспечивающих соответствующее минимальное значение ошибки е1…еn для каждого откорректированного тестового сигнала K1(t,α)…Kn(t,α), после чего из массива α1…αn осуществляют окончательный выбор оптимального значения параметра αopt, в качестве которого, в зависимости от конкретного алгоритма R{} и диапазона значений параметров α1…αn, берут среднее арифметическое значение или медианное значение из массива α1…αn.
, j=1…n, после чего определяют зависимость значения ошибки е1…еn от параметра α путем изменения значения этого параметра, в результате чего получают массив значений параметров α1…αn, обеспечивающих соответствующее минимальное значение ошибки е1…еn для каждого откорректированного тестового сигнала K1(t,α)…Kn(t,α), после чего из массива α1…αn осуществляют окончательный выбор оптимального значения параметра αopt, в качестве которого, в зависимости от конкретного алгоритма R{} и диапазона значений параметров α1…αn, берут среднее арифметическое значение или медианное значение из массива α1…αn.
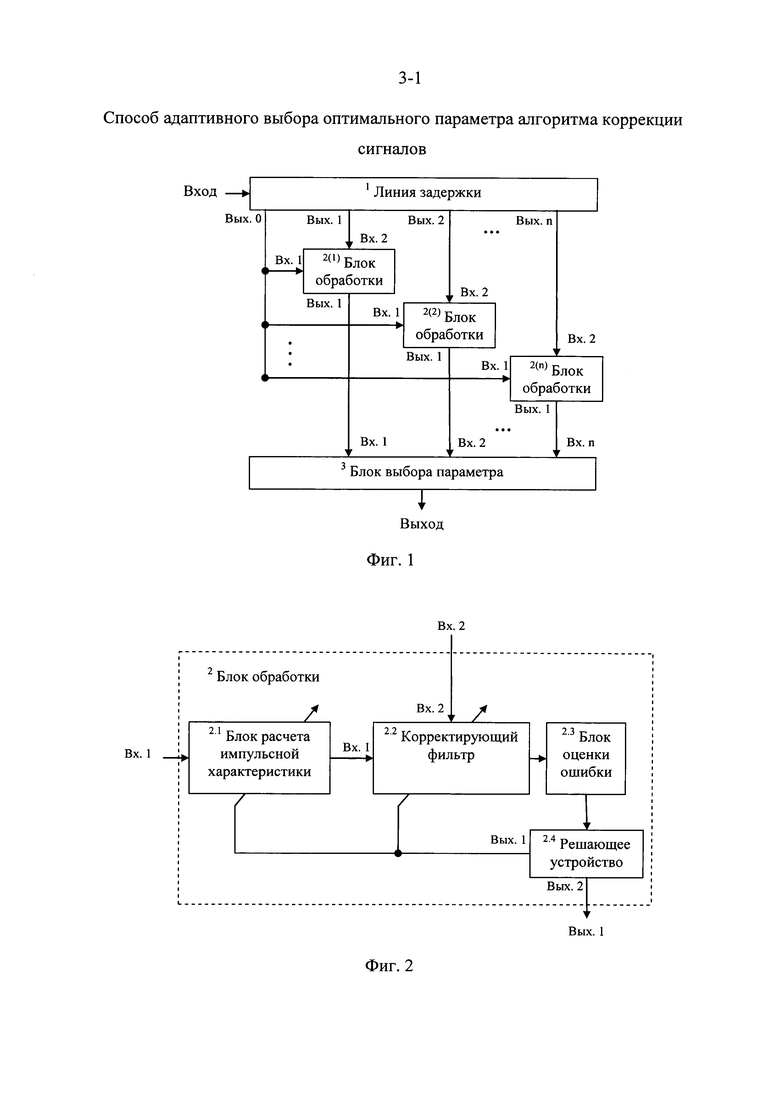
На фиг. 1, 2 представлена структурная схема способа адаптивного выбора оптимального параметра алгоритма коррекции сигналов.
Она содержит:
1 - линию задержки;
2(1)-2(n) - блок обработки;
3 - блок выбора параметра.
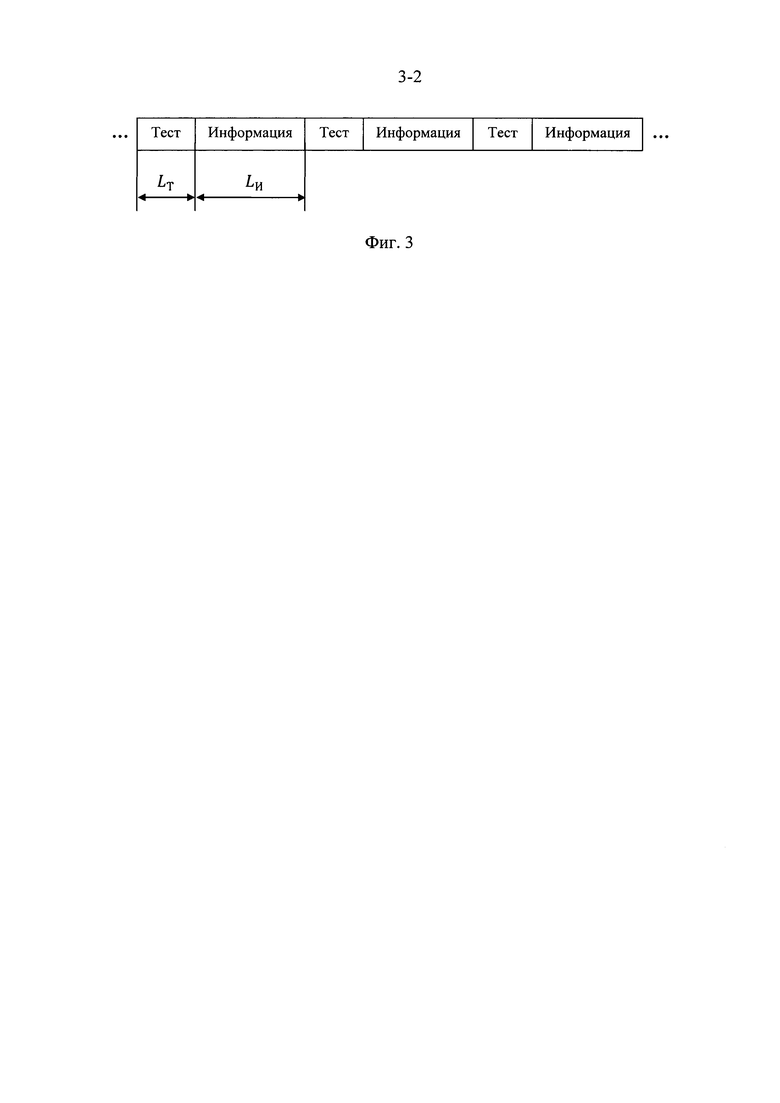
В свою очередь каждый блок обработки 2(1)-2(n) содержит:
2.1 - блок расчета импульсной характеристики;
2.2 - корректирующий фильтр;
2.3 - блок оценки ошибки;
2.4 - решающее устройство.
Работа способа осуществляется следующим образом. На вход линии задержки 1 поступает сигнал, содержащий периодически повторяющиеся тестовые и информационные сигналы. Структура такого сигнала представлена на фиг. 3. При этом длина каждого тестового сигнала составляет LT, длина каждого информационного сигнала LИ. Количество отводов (выходов) линии задержки 1, равное n+1, может быть различным и выбирается исходя из конкретного применения. С каждого из n+1 выходов линии задержки 1 поступают тестовые сигналы u0(t)…un(t) длиной LT, задержанные на интервал, равный длине информационного сигнала LИ. При этом с 0-го выхода линии задержки 1 тестовый сигнал подают на первый вход каждого блока обработки 2(1)-2(n), на второй вход которых поступают тестовые с выходов 1…n линии задержки 1, а именно с 1-го выхода линии задержки 1 на второй вход блока обработки 2(1), со 2-го выхода линии задержки 1 на второй вход блока обработки 2(2) и т.д.
В каждом блоке обработки 2(1)-2(n) осуществляют следующее.
Поступивший с первого входа блока обработки 2(1)-2(n) тестовый сигнал u0 подают на вход блока расчета импульсной характеристики 2.1, с выхода которого импульсную характеристику корректирующего фильтра hкop(t,α) подают на первый вход корректирующего фильтра 2.2. При этом на второй вход корректирующего фильтра 2.2 подают соответствующий тестовый сигнал u1(t)…un(t), поступивший со второго входа блока обработки 2(1)-2(т). На выходе корректирующего фильтра 2.1 получают соответствующий откорректированный тестовый сигнал K1(t,α)…Kn(t,α), который подают на вход блока оценки ошибки 2.3. При этом в блоке расчета импульсной характеристики 2.1 и корректирующем фильтре 2.2 используют один и тот же алгоритм, обозначенный ранее как R{}. В блоке оценки ошибки 2.3 получают значение ошибки, в качестве которой служит среднеквадратичное уклонение откорректированного тестового сигнала K1(t,α)…Kn(t,α) от образцового тестового сигнала K(t), т.е. , j=1…n. Полученное на выходе блока оценки ошибки 2.3 значение ошибки е1…еn подают на вход решающего устройства 2.4, в котором определяют зависимость значения ошибки е1…еn от параметра α путем изменения значения этого параметра на первом выходе решающего устройства 2.4 и передаче его на управляющие входы блока расчета импульсной характеристики 2.1 и корректирующего фильтра 2.2. В результате на втором выходе решающего устройства 2.4, являющегося выходом блока обработки 2(1)-2(n), получают значение параметра α1…αn, обеспечивающего минимальное значение ошибки е1…еn.
, j=1…n. Полученное на выходе блока оценки ошибки 2.3 значение ошибки е1…еn подают на вход решающего устройства 2.4, в котором определяют зависимость значения ошибки е1…еn от параметра α путем изменения значения этого параметра на первом выходе решающего устройства 2.4 и передаче его на управляющие входы блока расчета импульсной характеристики 2.1 и корректирующего фильтра 2.2. В результате на втором выходе решающего устройства 2.4, являющегося выходом блока обработки 2(1)-2(n), получают значение параметра α1…αn, обеспечивающего минимальное значение ошибки е1…еn.
Полученные на выходе блоков обработки 2(1)-2(n) значения параметра, представляющие собой массив α1…αn, подают на соответствующие входы блока выбора параметра 3. В блоке выбора параметра 3 осуществляют окончательный выбор параметра α, получая на выходе оптимальное значение параметра αopt. В зависимости от конкретного алгоритма R{} и возможного диапазона значений параметров α1…αn, поступивших на входы блока выбора параметра 3, в качестве оптимального значения параметра αорt берут среднее арифметическое значение:

или медианное значение, соответствующее:

где массив α1'…αn’ соответствует отсортированным по возрастанию значениям α1…αn.
Техническим результатом является выбор оптимального параметра алгоритма коррекции сигналов с увеличенной точностью оценки αopt.
Список источников
1. ARINC Characteristic 635-4. HF Data Link Protocol. - Dec., 2003.
2. Джиган В.И. Адаптивная фильтрация сигналов: теория и алгоритмы. - М.: Техносфера, 2013. - 528 с.
3. Sayed А.Н. Adaptive filters. - New Jersey: Hoboken: John Wiley & Sons, Inc., 2008. - 786 c.
4. Тихонов A.H., Арсенин В.Я. Методы решения некорректных задач / Учебное пособие для вузов. - Изд. 3-е испр. - М.: Наука, 1986. - 288 с.
5. Верлань А.Ф., Сизиков B.C. Методы решеня интегральных уравнений с программами для ЭВМ. Справочное пособие. - Киев: Наукова думка, 1978. - 292 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ВЫБОРА ОПТИМАЛЬНОГО ПАРАМЕТРА АЛГОРИТМА КОРРЕКЦИИ ПО ОЦЕНКЕ ПРИЕМА В ЦЕЛОМ ИНФОРМАЦИОННОГО СИГНАЛА | 2019 |
|
RU2705466C1 |
| СПОСОБ АДАПТИВНОГО ВЫБОРА ОПТИМАЛЬНОГО ПАРАМЕТРА АЛГОРИТМА КОРРЕКЦИИ НА ОСНОВЕ РАЗБРОСА ФАЗ КОРРЕКТИРУЕМОГО СИГНАЛА | 2018 |
|
RU2693286C1 |
| Устройство обнаружения и коррекции ошибки модулярного кода | 2017 |
|
RU2653257C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ИТЕРАТИВНЫЙ ФИЛЬТР | 2007 |
|
RU2362265C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ РЕКУРСИВНЫЙ ФИЛЬТР | 2007 |
|
RU2357357C2 |
| Устройство коррекции ошибок в модулярном коде на основе расширения системы оснований | 2017 |
|
RU2652446C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ МНОГОКАСКАДНЫЙ ФИЛЬТР | 2010 |
|
RU2436228C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ПРИЕМА OFDM СИГНАЛОВ В КАНАЛАХ С ПАМЯТЬЮ | 2015 |
|
RU2618211C2 |
| ЦИФРОВОЙ МНОГОИТЕРАЦИОНАЛЬНЫЙ ФИЛЬТР | 2011 |
|
RU2452080C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
Изобретение относится к технике связи и может быть использовано в системах передачи данных с адаптивной коррекцией сигналов для выбора параметра алгоритма коррекции. Техническим результатом является выбор оптимального параметра алгоритма коррекции сигналов без знания априорной информации с увеличенной точностью оценки αopt. Для этого, используя алгоритм R{} на основе поступившего тестового сигнала u0(t) рассчитывают импульсную характеристику корректирующего фильтра hкоp(t,α), с помощью которой, используя алгоритм R{}, корректируют поступившие тестовые сигналы u1(t)…un(t), задержанные на интервал, равный длине информационного сигнала LИ, в результате чего получают откорректированные тестовые сигналы K1(t,α)…Kn(t,α), определяют значения ошибки  , определяют зависимость значения ошибки е1…en от параметра α путем изменения значения этого параметра, в результате чего получают массив значений параметров α1…αn, обеспечивающий соответствующее минимальное значение ошибки е1…en для каждого откорректированного тестового сигнала K1(t,α)…Kn(t,α), после чего из массива α1…αn осуществляют окончательный выбор оптимального значения параметра αopt. 3 ил.
, определяют зависимость значения ошибки е1…en от параметра α путем изменения значения этого параметра, в результате чего получают массив значений параметров α1…αn, обеспечивающий соответствующее минимальное значение ошибки е1…en для каждого откорректированного тестового сигнала K1(t,α)…Kn(t,α), после чего из массива α1…αn осуществляют окончательный выбор оптимального значения параметра αopt. 3 ил.
Способ адаптивного выбора оптимального параметра алгоритма коррекции сигналов заключается в том, что используя алгоритм R{} на основе поступившего тестового сигнала u0(t) рассчитывают импульсную характеристику корректирующего фильтра hкоp(t,α), отличающийся тем, что с помощью импульсной характеристики корректирующего фильтра hкоp(t,α), используя алгоритм R{}, корректируют поступившие тестовые сигналы u1(t)…un(t), задержанные на интервал, равный длине информационного сигнала LИ, в результате чего получают откорректированные тестовые сигналы K1(t,α)…Kn(t,α), определяют значения ошибки е1…en, в качестве которой служит среднеквадратичное уклонение откорректированного тестового сигнала K1(t,α)…Kn(t,α) от образцового тестового сигнала K(t), т.е.  , j=1…n, после чего определяют зависимость значения ошибки е1…en от параметра α путем изменения значения этого параметра, в результате чего получают массив значений параметров α1…αn, обеспечивающий соответствующее минимальное значение ошибки е1…en для каждого откорректированного тестового сигнала K1(t,α)…Kn(t,α), после чего из массива α1…αn осуществляют окончательный выбор оптимального значения параметра αopt, в качестве которого, в зависимости от конкретного алгоритма R{} и диапазона значений параметров α1…αn, берут среднее арифметическое значение или медианное значение из массива α1…αn.
, j=1…n, после чего определяют зависимость значения ошибки е1…en от параметра α путем изменения значения этого параметра, в результате чего получают массив значений параметров α1…αn, обеспечивающий соответствующее минимальное значение ошибки е1…en для каждого откорректированного тестового сигнала K1(t,α)…Kn(t,α), после чего из массива α1…αn осуществляют окончательный выбор оптимального значения параметра αopt, в качестве которого, в зависимости от конкретного алгоритма R{} и диапазона значений параметров α1…αn, берут среднее арифметическое значение или медианное значение из массива α1…αn.
| А.Ф.ВЕРЛАНЬ и др., Методы решения интегральных уравнений с программами для ЭВМ, Справочное пособие, Киев, Наукова Думка, 1978, стр | |||
| Рогульчатое веретено | 1922 |
|
SU142A1 |
| ЛИНЕЙНАЯ КОРРЕКЦИЯ НА ОСНОВЕ ПРЕОБРАЗОВАНИЯ ФУРЬЕ ДЛЯ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ МДКР | 2004 |
|
RU2315429C2 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ МНОГОКАСКАДНЫЙ ФИЛЬТР | 2010 |
|
RU2436228C1 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 2009 |
|
RU2506711C2 |

