Изобретение относится к медицине, медицинской технике, а именно к травматологии и ортопедии.
Известны устройства для разработки движений в суставах пальцев кисти, например «Устройство для восстановления работоспособности и тренировки пальцев руки», состоящее из корпуса, шарнирно закрепленной на нем опоры для кисти, фиксатора для запястья и планки для предплечья. Система зажимов обеспечивает фиксацию руки пациента, а система блоков с колпачками для концевых фаланг - перемещение пальцев кисти и самой кисти с дифференцированными усилиями. Устройство предназначено для восстановления сгибательно-разгибательных движений пальцев кисти. Применение в устройстве опоры для кисти, несмотря на всю сложность устройства, конструктивно ограничивает восстановление функции сухожилий сгибателей; невозможно полностью сжать пальцы с зажатым в них предметом. Кроме того, данный аппарат не позволяет автоматизировать процесс реабилитации (Патент США №5451191, 1995 г.).
Наиболее близким аналогом к предлагаемому техническому решению (прототипом) является роботизированный реабилитационный комплекс с обратной связью для диагностики и лечения нарушений мелкой моторики кисти «Amadeo» производства фирмы «Tyromotion». (https://tyromotion.ru/amadeo). Комплекс состоит из основания с закрепленной на нем лангете фиксации предплечья и запястья, электроприводов со стойками (по одному для каждого пальца), магнитных колпачков для пальцев и блока управления. Закрепленная в лангете рука снабжена одноразовыми магнитными колпачками для дистальных фаланг пальцев, которые закреплены на стойках электроприводов при помощи магнитных сил. Возвратно-поступательное движение данных стоек обеспечивает сгибание и разгибание пальцев. Регуляция движения осуществляется при помощи компьютеризированного блока управления.
К недостаткам данного комплекса можно отнести:
Сложность устройства в применении и обслуживании, а так же неэкономичность, так как работа комплекса требует постоянной замены расходных материалов (магнитные колпачки утилизируются после каждой процедуры).
Кроме того, низкая эффективность процедуры, обусловленная конструкцией комплекса, которая не предусматривает амплитуду движения пальцев кисти до сжимания их в кулак.
Целью предлагаемого устройства является упрощение конструкции устройства для восстановления двигательной активности пальцев кисти и максимальное упрощение управления и обслуживания, а так же повышение эффективности восстановления движения при помощи увеличения амплитуды сгибательного движения пальцев кисти до положения сжатых в кулак пальцев.
Указанные эффекты достигаются за счет того, что, во-первых, принцип работы устройства основан на регулируемой по силе, скорости и амплитуде передаче энергии сжатого воздуха на пальцы кисти. Использование сжатого воздуха значительно увеличивает ресурс аппарата, а так же повышает его надежность и простоту эксплуатации.
Во-вторых, устройство содержит элементы, передающее усилие с пневмоцилиндра на пальцы кисти, представленные многоразовыми колпачками для пальцев, стальными проволоками, а так же распределителя стальных тросов. Колпачки для пальцев изготовлены из ABS - пластика, выполнены в форме П-образной подковы, имеют вырезку с ладонной стороны пальца овальной формы и наклонный шток с отверстием на тыльной стороны пальца для соединения со стальной проволокой.
В-третьих, блок управления устройством содержит воздушный компрессор и ШИМ-регулятор, снабженный цифровым вольтметром с дисплеем и ручкой для плавной регулировки подаваемого на электродвигатель воздушного компрессора напряжения.
В-четвертых, система доставки атмосферного воздуха, совмещенная с системой охлаждения, состоит из двух вентиляторов с противоположным друг другу направлением тока воздуха, расположенных друг напротив друга таким образом, чтобы обеспечивать прямой воздушный поток через весь корпус. Суммарная производительность - не менее 0.85 кубических метров воздуха в минуту, расчетная суммарная рассеиваемая мощность - не менее 150 В. Для повышения эффективности теплоотведения, печатные платы регулятора напряжения, а так же таймера автоматического отключения, расположены на пластинчатом радиаторе с площадью основания 100 см квадратных.
Новизна предлагаемого устройства для восстановления двигательной активности пальцев кисти заключается в том, что возможность пассивной и пассивно-активной разработки суставов и сухожилий пальцев кисти впервые реализована при помощи преобразования энергии сжатого воздуха. Используемая система позволяет осуществлять плавные поступательные движения благодаря сжимаемости воздуха, который выступает в роли «воздушного демпфера». Использование простых схем управления аппаратом позволяет использовать устройство без длительной дополнительной подготовки медицинского персонала. Устройство колпачков для пальцев позволяет многократно и без дополнительной подстройки использовать их для пальцев разных размеров. Использованные пневмомеханические элементы обеспечивают за счет своей надежности и износостойкости возможность длительной эксплуатации, а так же упрощают работу и обслуживание устройства
Технические решения, имеющие признаки, совпадающие с отличительными признаками предлагаемого нами способа, не выявлены, что позволяет сделать вывод о соответствии предлагаемого способа критерию «изобретательский уровень».
Предлагаемое пневмомеханическое устройство для восстановления двигательной активности пальцев кисти состоит из следующих составных частей (см. Фиг. 1-5):
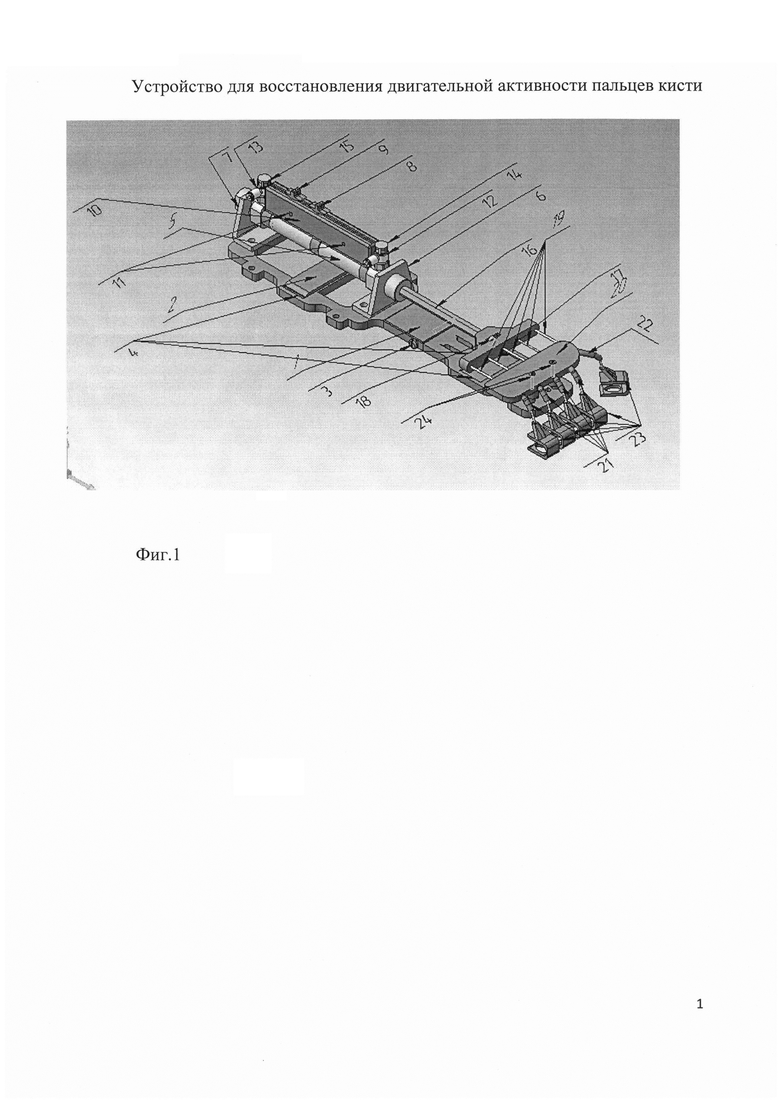
1. Основание (см. фиг. 1) состоит из дистальной 1 и проксимальной 2 частей лангеты, скрепленных между собой при помощи резьбового винта 3. Обе части лангеты имеют сложную анатомическую форму, изготовлены методом прессования либо трехмерной печати из АБС пластмассы белого либо серого цвета, сборно-разборное соединение представлено винтом М5 и гайкой шестигранной М5. Общая длина лангеты - 372 мм. Для закрепления на предплечье в обеих частях лангет расположены продольные отверстия для жгута 4. На проксимальной части лангеты располагается пневмоциллиндр 5 двухстороннего действия с воздушным демпфированием, прикрепленный к ней при помощи проксимальной 6 и дистальной 7 стальных лап пневмоциллиндра. На пневмоциллиндре располагаются проксимальный 8 и дистальный 9 корпуса герконовых датчиков, изготовленных методом трехмерной печати либо прессования из АБС пластика серого либо черного цвета, закрепленных при помощи направляющего элемента корпусов герконовых датчиков 10, изготовленных так же из АБС пластика методом трехмерной печати. На боковой поверхности направляющего элемента корпусов герконовых датчиков располагаются отверстия для проводов герконовых датчиков 11.
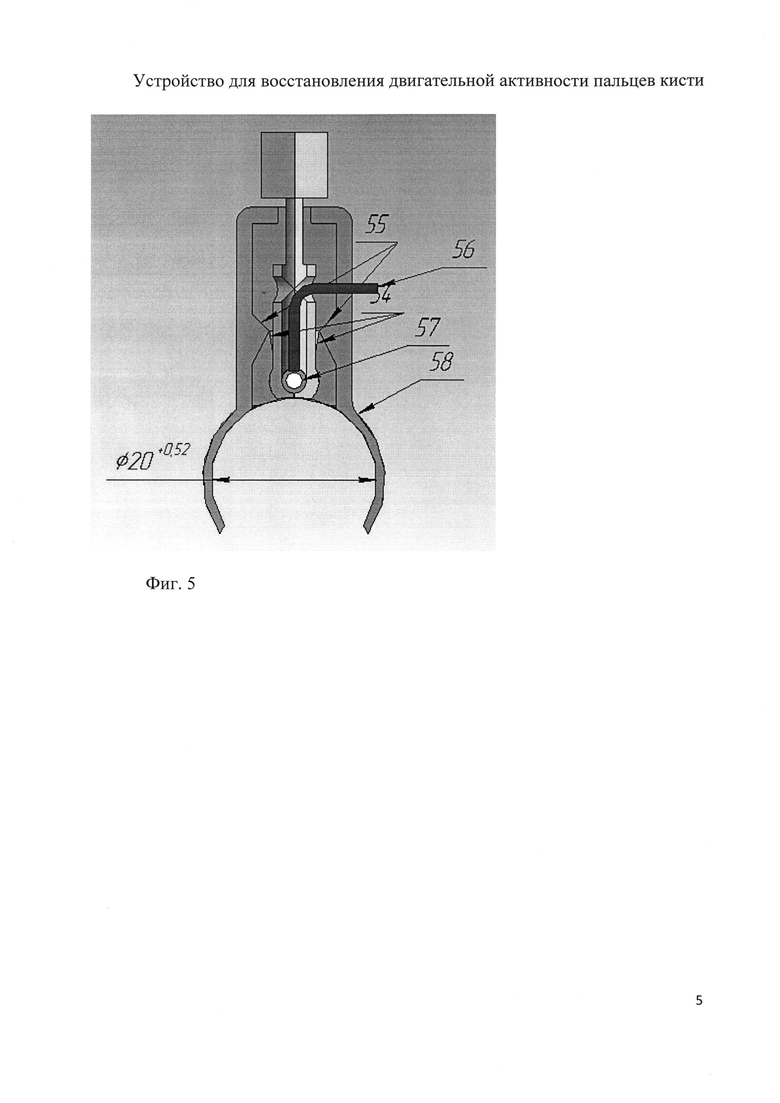
Корпуса герконовых датчиков, а так же внутреннее устройство направляющего элемента герконовых датчиков, более детально рассмотрены в разрезе (см. фиг. 5). Элементами удержания корпусов герконовых датчиков являются выступы для закрепления герконовых датчиков на корпусе герконовых датчиков 54, а так же соответствующие им выступы для закрепления герконовых датчиков изнутри направляющего элемента герконовых датчиков 55. Внутри каждого корпуса герконового датчика расположен электрический провод герконового датчика 56, герконовый датчик 57. Направляющий элемент герконовых датчиков закреплен на пневмоциллиндре при помощи лап направляющего элемента герконовых датчиков 58.
Помимо этого, на пневмоциллиндре располагаются проксимальный 12 и дистальный 13 пневмодроссели, снабженные соответственно проксимальным 14 и дистальным 15 регуляторами пневмодросселя. Шток 16 снабжен на конце стандартной резьбой диаметром М8, а так же элементом крепления стальных проволок 17, прикрепленный при помощи резьбовой гайки 18. Стальные проволоки 19, числом 5, жестко закреплены в элементе крепления стальных проволок, с проксимального конца, а дистальным -проходят через цельнолитой распределитель стальных проволок 20, изготовленный из АБС пластика методом трехмерной печати, каждый к своему пальцу, через изогнутую в сагиттальной плоскости с радиусом изгиба 12 мм и длинной дуги 15 мм трубки распределителя стальных проволок для 1-4 пальцев 21, трубку распределителя стальных проволок для 5-го пальца 22 изогнутую сначала в сагиттальной плоскости с радиусом 25 мм и длиной дуги 6 мм, а затем во фронтальной, с радиусом изгиба 12 мм и длиной дуги 9, где жестко закреплены в колпачках для пальцев 23, числом 5. Распределитель стальных проволок прикреплен к дистальной части лонгеты при помощи резьбовых винтов 24.
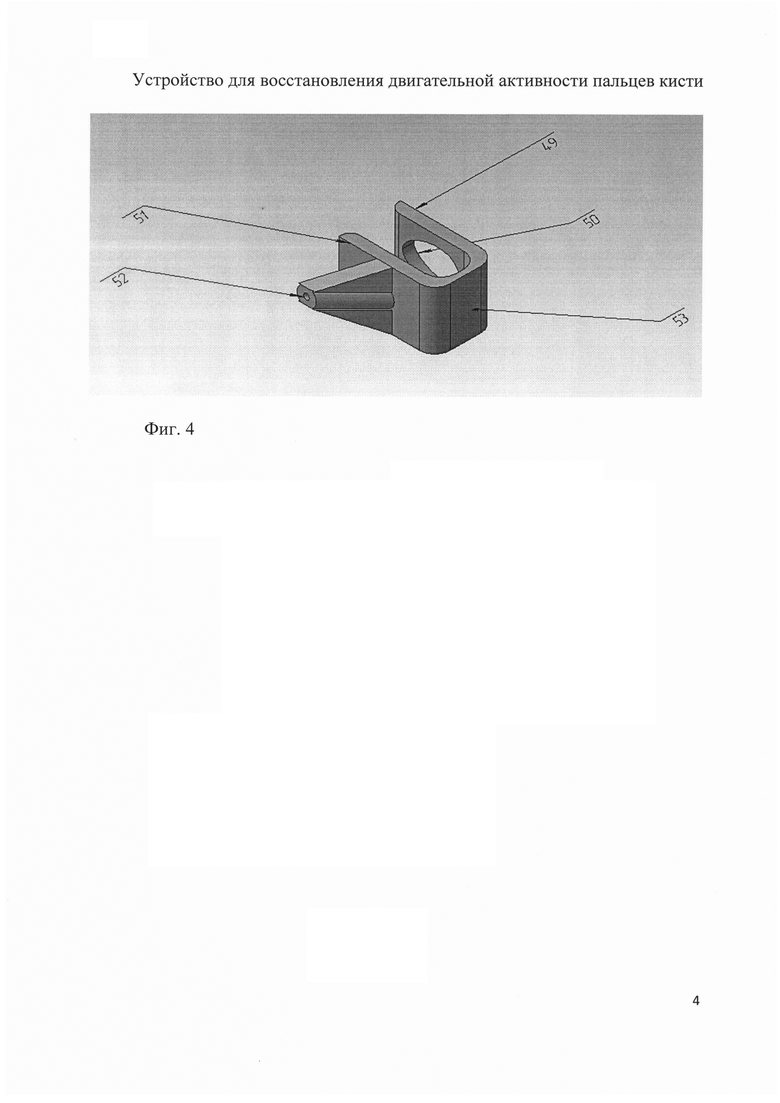
2. Каждый из 5 колпачков для пальцев 23 (см. фиг. 4) является цельнолитой конструкцией, изготовленной из АБС пластика методом прессования, и состоит из нижней параллельной пластины 49 с расположенным на ней отверстием для подушечки пальца 50, верхней параллельной пластины 51, снабженной с наружной стороны стойкой с отверстием для стальной проволоки 52. Между собой верхняя и нижняя параллельные пластины соединены при помощи перпендикулярной соединительной пластины 53.
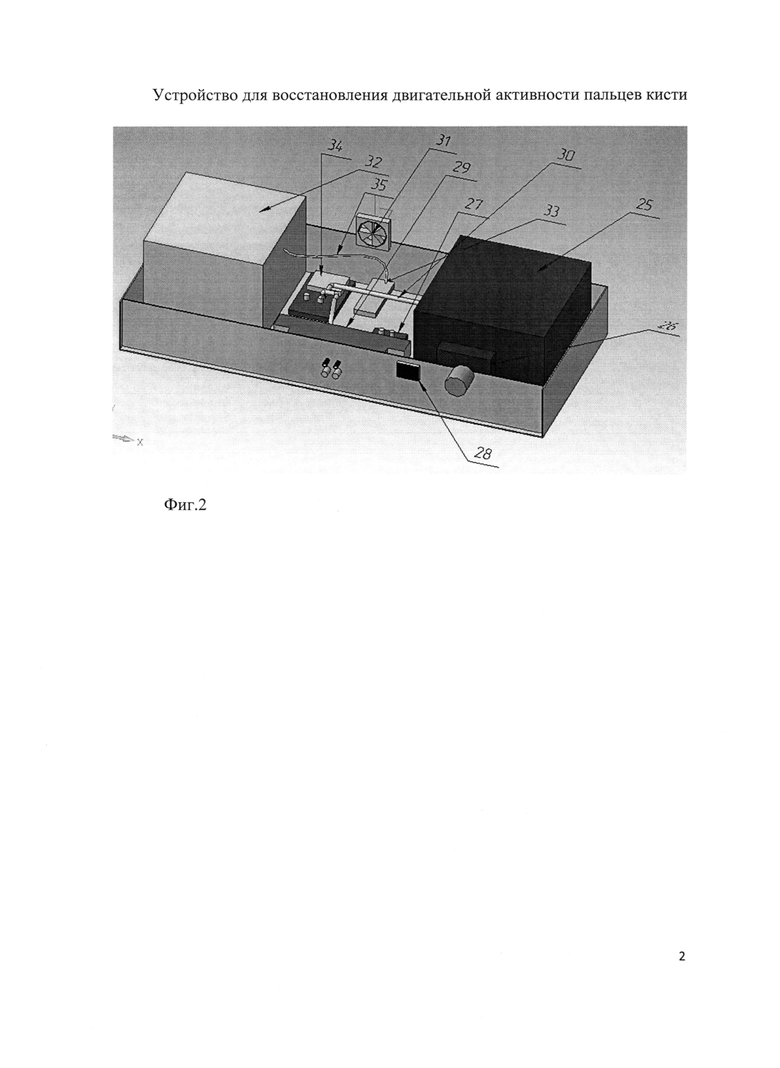
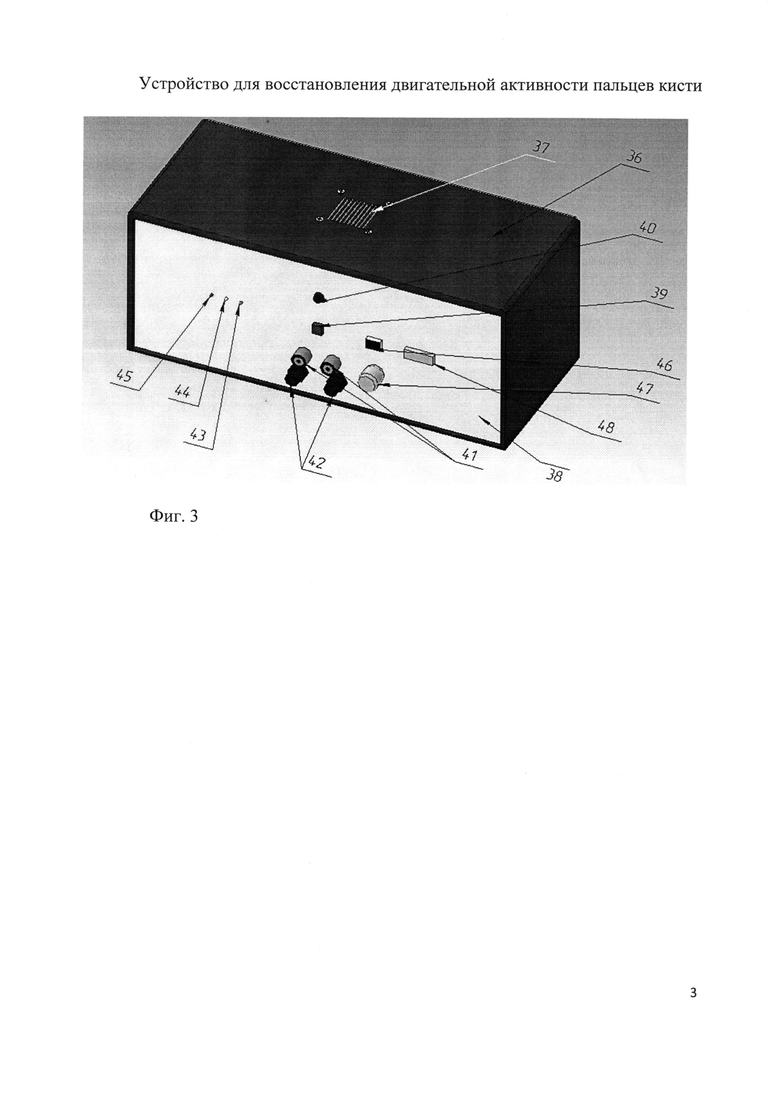
3. Блок управления состоит из корпуса 36 с размещенными на нем компонентами (см. фиг. 3), и структурных элементов (см. фиг. 2). Воздушный компрессор 25, подключенный при помощи ШИМ-регулятора 26, снабженного цифровым вольтметром 27. Воздушный компрессор должен иметь создавать рабочее давление в системе до 5 Атм при производительности до 35 л/мин, с потребляемой мощностью тока до 120 Ватт. Пневматический выход компрессора проходит через цифровой манометр 28, после чего присоединяется ко входу бистабильного пневмораспределителя 5/2 29 при помощи пневмотрубки 30. Бистабильный пневмораспределитель 5/2 имеет электрическое управление золотником. На верхней и задней стенке блока управления расположены вентиляторы 31, получающие питание, как и прочие элементы блока управления, от источника питания блока управления 32, через управляющую плату 33. Источник питания блока управления 32 представляет собой устройство-преобразователь переменного тока из бытовой электросети 220V в постоянный ток, имеющий силовые шины с характеристиками 12V 10А, 5 V 4 А, общей мощностью не менее 200 Ватт. Помимо прочего, в блоке управления присутствует так же таймер 34, установленный на процедуру длительностью 15 минут. Все электрические элементы соединены при помощи электрических проводов 35, имеющих двойную изоляцию. Все элементы блока управления расположены в корпусе с приборной панелью. Корпус 36 (см. фиг. 3) имеет прорези для вентиляции 37 на верхней и задней поверхности. Передняя стенка корпуса представляет собой приборную панель 38, выполненную из стеклонаполненного полиамида, на которой расположены: кнопка питания 39, кнопка запуска 40, разъемы для проводов герконовых датчиков 41, разъемы для пневмотрубок и пневмотрубки 42, светодиод №1 43, светодиод №2 44, светодиод №3 45. Помимо этого, на приборной панели располагаются так же дисплей цифрового вольтметра 46 с расположенной рядом с ним ручкой ШИМ-регулятора 47. Кроме того, на приборной панели расположен дисплей цифрового манометра 48, проградуированный в несистемных единицах измерения давления - атмосферах.
Предлагаемое устройство для восстановления двигательной активности пальцев кисти работает следующим образом.
На предплечье пациента устанавливают дистальную 1 и проксимальную 2 части лангеты, скрепленные между собой при помощи резьбового винта 3. Через продольные прорези для жгута пропускают матерчато-эластический жгут, который затягивают для фиксации. После этого на концевые фаланги пациента надевают колпачки для пальцев 23. Затем включают питание блока управления при помощи кнопки питания 39. Загорается светодиод №14), начинают свою работу вентиляторы (31. Затем устанавливают необходимую амплитуду движений движения штока 6 при помощи перемещения проксимального 8 и дистального 9 корпусов герконовых датчиков, при этом вручную двигают шток 6 и следят за индикацией светодиода №2 44, который загорается каждый раз, когда герконовый датчик 57 попадает в магнитное поле штока 6.
После этого шток 6 помещают в среднее положение между двумя герконовыми датчиками 57, при котором светодиод №2 44 не горит. Затем устанавливают необходимое открытие проксимального 12 и дистального 13 пневмодросселя при помощи регуляторов проксимального 14 и дистального 15 пневмодросселя. После этого нажимают кнопку запуска 40. Загорается светодиод №3 45, включается таймер 34, питание подается на ШИМ-регулятор 26, значение напряжение которого отражается на дисплее цифрового вольтметра 46 и регулируется при помощи ручки ШИМ-регулятора 47. В зависимости от подаваемого напряжения, регулируют выходящее из воздушного компрессора 25 давление, которое отображается на дисплее цифрового манометра 48. Под действием сил сжатого воздуха, проходящего по пневмотрубке 30 к бистабильному пневмораспределителю 5/2 29, и через соединительные разъемы для пневмотрубок и пневмотрубки 42, проходящие к дистальному 12 и проксимальному 13 пневмодросселям, шток 6 смещается, приводя в движение стальные проволоки 19 с закрепленными на их концах колпачками для пальцев 23. При помощи распределителя стальных проволок 20 колпачки для пальцев 23 приводят в движение пальцы кисти. Как только, магнитное поле штока 6 доходит до проксимального 8 или дистального 9 корпуса герконового датчика 57, при помощи проводов герконового датчика 56 замыкается электрическая цепь переключения пневматических линий в бистабильном пневмораспределителе 5/2 29, мигает светодиод №2 44, и шток 6 цилиндра движется в противоположном направлении, соответственно передавая энергию движения пальцам кисти.
Предлагаемое устройство входит в цикл работы, который завершается с истечением заданного таймером 34 времени процедуры, установленным на 15 минут. Сразу по истечении заданных таймером 15 минут, таймер 34 отключает ШИМ-регулятор 26, одновременно с этим отключается воздушный компрессор 25, гаснет светодиод №3 45, движения прекращаются. После этого приводят регуляторы проксимального 14 и дистального 15 пневмодросселей в максимально открытое положение, снимают колпачки для пальцев 23, затем удаляют матерчатый эластический жгут и снимают основание с предплечья пациента. После этого отключают питание аппарата при помощи кнопки питания 39.
Клинический пример.
Больная С. 61 год, с основным диагнозом «Поздний восстановительный период: ишемический инсульт (атеротромботический подтип) в бассейне правой средней мозговой артерии на фоне гипертонической болезни III степени III стадии, риск IV». Предъявляет жалобы на слабость в левой руке и тугую подвижность в суставах пальцев левой кисти. Назначено восстановление двигательной активности пальцев левой кисти при помощи предлагаемого устройства. В течение 2-х недель проводилась ежедневные процедуры восстановления двигательной активности пальцев кисти при помощи предлагаемого устройства. В результате: исчезла тугая подвижность в суставах, увеличилась амплитуда активных движений в пальцах левой кисти.
Предлагаемое устройство использовано в амбулаторных условиях ГУЗ ЯО «Клиническая больница №8» и может быть использовано также в стационарных условиях для восстановления двигательной активности пальцев кисти.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТРАНЕНИЯ ПРИВОДЯЩЕЙ КОНТРАКТУРЫ 1-ГО ПАЛЬЦА КИСТИ | 2003 |
|
RU2246913C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ КОНТРАКТУРЫ ДЮПЮИТРЕНА II-III СТЕПЕНИ ВЫРАЖЕННОСТИ | 2016 |
|
RU2639021C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОБЩЕЙ ЧУВСТВИТЕЛЬНОСТИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2021 |
|
RU2762857C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ ПАЛЬЦЕВ КИСТИ | 2005 |
|
RU2324465C2 |
| СПОСОБ ЛЕЧЕНИЯ БОЛЬНЫХ С ТРАВМАМИ ПЕРИФЕРИЧЕСКИХ НЕРВОВ ПОСЛЕ ДЛИТЕЛЬНОЙ ИММОБИЛИЗАЦИИ | 1999 |
|
RU2185202C2 |
| СПОСОБ ЛЕЧЕНИЯ ЗАСТАРЕЛЫХ ВЫВИХОВ ФАЛАНГ ПАЛЬЦЕВ КИСТИ | 1999 |
|
RU2187274C2 |
| Способ восстановления сухожилия глубокого сгибателя пальцев кисти | 1980 |
|
SU982668A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИЙ ВЕРХНИХ КОНЕЧНОСТЕЙ | 1992 |
|
RU2063203C1 |
| СПОСОБ АКТИВАЦИИ УТРАЧЕННЫХ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ, А ТАКЖЕ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ ИХ ВОССТАНОВЛЕНИЯ ПРИ ПОВРЕЖДЕНИИ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2005 |
|
RU2316334C2 |
| СПОСОБ ЛЕЧЕНИЯ ТРАВМАТИЧЕСКИХ НЕЙРОПАТИЙ | 2003 |
|
RU2257924C1 |
Изобретение относится к области медицины, медицинской технике, а именно к травматологии и ортопедии. Устройство содержит основание, колпачки и блок управления. Основание представляет собой две части одной лангеты, соединенные между собой болтом на резьбе, общим размером 372×100×8 мм. На основании расположен пневмоциллиндр, имеющий проксимальный и дистальный пневмодроссели, каждый из которых снабжен отдельным регулятором. Колпачки для пальцев выполнены в виде цельнолитой конструкции, состоят из двух параллельных и одной поперечной пластин, при этом одна из параллельных пластин содержит отверстие для закрепления подушечки пальца, а другая - стойку и отверстие для присоединения к стальным проволокам. Устройство снабжено стальными проволоками передачи усилия к пальцам кисти, направление движения которых задается при помощи распределителя стальных тросов, имеющего в своем составе направляющие трубки для 1-4 пальцев, а также направляющую трубку для 5 пальца. Блок управления дополнительно снабжен воздушным компрессором и ШИМ-регулятором, ручка которого вынесена на приборную панель. Устройство позволяет осуществить восстановление двигательной активности пальцев кисти в восстановительном периоде мозгового инсульта в амбулаторных условиях за счет конструктивных составляющих, которые позволяют увеличить амплитуду сгибательного движения пальцев кисти до положения сжатых в кулак пальцев. 5 ил., 1 пр.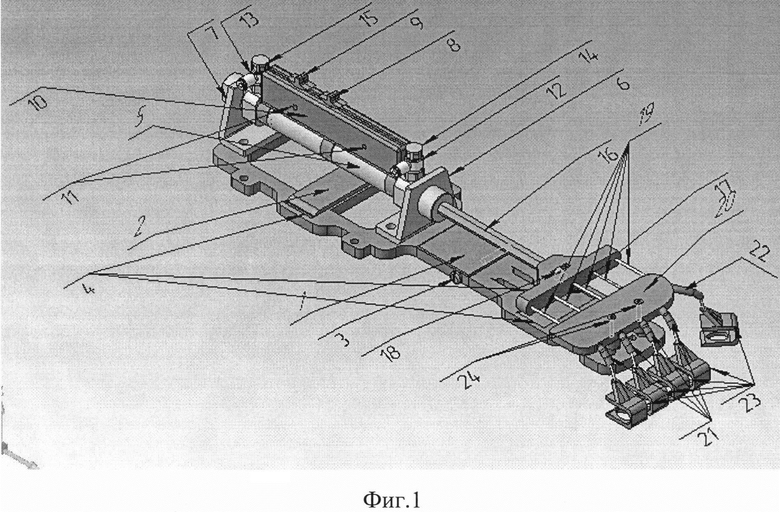
Устройство для восстановления двигательной активности пальцев кисти, содержащее основание, колпачки, блок управления, отличающееся тем, что основание представляет собой две части одной лангеты, соединенные между собой болтом на резьбе, общим размером 372×100×8 мм; на основании расположен пневмоцилиндр, имеющий проксимальный и дистальный пневмодроссели, каждый из которых снабжен отдельным регулятором; колпачки для пальцев выполнены в виде цельнолитой конструкции, состоят из двух параллельных и одной поперечной пластин, при этом одна из параллельных пластин содержит отверстие для закрепления подушечки пальца, а другая - стойку и отверстие для присоединения к стальным проволокам; устройство снабжено стальными проволоками передачи усилия к пальцам кисти, направление движения которых задается при помощи распределителя стальных тросов, имеющего в своем составе направляющие трубки для 1-4 пальцев, а также направляющую трубку для 5 пальца; блок управления дополнительно снабжен воздушным компрессором и ШИМ-регулятором, ручка которого вынесена на приборную панель.
| НЕЖИВАЯ Ю | |||
| Н | |||
| и др | |||
| Системный анализ проблематики управления процессами реабилитации кистей и пальцев рук | |||
| Прикаспийский журнал: управление и высокие технологии, N3(23), 2013, с | |||
| Экономайзер | 0 |
|
SU94A1 |
| УСТРОЙСТВО ДЛЯ ПАССИВНО-АКТИВНОЙ ГИМНАСТИКИ ПАЛЬЦЕВ "ПАЛЬЧИКОВЫЙ БАССЕЙН" | 2002 |
|
RU2253430C2 |
| Приспособление для прочистки сточных отверстий и труб у кухонных раковин, отхожих мест, писсуаров и проч. | 1927 |
|
SU9240A1 |
| JP 2007244437 A, 27.09.2007 | |||
| US 5451191 A, 19.10.1995. | |||

