Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к области беспроводной передачи данных и, более конкретно, к устройству и способу в системах Долгосрочного развития (LTE) и усовершенствованной LTE (LTE-A) Универсальной системе мобильной передачи данных (UMTS).
Уровень техники
Концепция гетерогенной сети вначале была предложена в 3GPP Reí-10 и быстро стала центром внимания в данной области техники. Улучшение мобильности в гетерогенной сети представляет собой один из рабочих элементов в этой области техники, который предназначен для улучшения пропускной способности сети при обеспечении для пользователей стабильной зоны обслуживания без стыков.
Для улучшения мобильности в гетерогенной сети обсуждалось множество проблем, и один из моментов дискуссии представляет собой детектирование малой соты и представляет собой рабочий элемент для улучшения мобильности гетерогенной сети 3GPP. Гетерогенная сеть включает в себя большое количество малых сот, например, микро-базовую станцию, пико-базовую станцию, фемто-базовую станцию, удаленный узел беспроводной передачи данных и т.п., которые, в основном, распределены в таких местах, как дом, офис, торговый центр и т.п. Нагрузка на макро-базовую станцию уменьшается, и пропускная способность сети также улучшается при переключении оборудования пользователя на малые соты.
Однако при введении концепции гетерогенной сети также возникло множество проблем. Например, используемый в настоящее время механизм для детектирования соседней соты предназначен для обеспечения мобильности оборудования пользователя (UE) без учета новой среды расположения в гетерогенной сети. Кроме того, например, в существующем стандарте механизм для детектирования соседних сот основан на s-измерении и измерении мощности приема опорного сигнала (RSRP) и/или качества приема опорного сигнала (RSRQ). Учитывая неоднородность распределения сот в гетерогенной сети, макросота имеет хорошее качество обслуживания, но может быть расположена очень близко к малым сотам, и оборудование пользователя может не иметь возможности детектировать малые соты в макросоте. Кроме того, например, стратегия детектирования малой соты всегда должна использовать зазоры в измерениях, и для оборудования пользователя частая конфигурация зазоров измерения не только приводит к повышенному потреблению энергии, но также в значительной степени занимает доступные ресурсы.
Следует отметить, что в расположении гетерогенной сети, очень часто зона охвата обеспечивается активными участками. В этой сцене макросота, в основном, обеспечивает охват больших площадей и малых сот, например, пико-сот, предоставляя служебную несущую на другой частоте. Поэтому, возможно улучшить индекс качества обслуживания (QoS) для пользователей в активных областях, и также возможно улучшить пропускную способность всей сети. Однако, из-за размещения на разных частотах малых сот и неоднородности зоны охвата, необходимо разрабатывать соответствующий механизм для обеспечения возможности эффективного переключения оборудования пользователя на малые соты. В 3GPP TR 36.839, детектирование малых сот на разных частотах включает в себя несколько общих типов:
a) конфигурация нестрогих измерений
В соответствии с типами (обслуживание как активных участков, или обеспечение зоны обслуживания) малых сот и скоростью оборудования пользователя, цикл измерений увеличивается для уменьшения ненужных измерений, и для оборудования пользователя, которое движется с высокой скоростью, не разрешено получать доступ к малым сотам в пределах активных участков. Такая схема уменьшает потребление энергии на стороне оборудования пользователя и взаимную помеху на уровне пользователя обслуживающей соты, но имеет плохую точность и задержку при детектировании.
b) индикация малой соты на основе близости
Измерение соты на разных частотах может быть инициировано на основе индикации близости, и эти схемы могут быть классифицированы, как основанные на макро-базовой станции, на основе малых сот или на основе оборудования пользователя. Схемы, основанные на макро-базовой станции и основанные на малой соте, не приводят к изменениям на уровне пользователя, и наибольшая проблема в настоящее время состоит в том, как улучшить точность. Кроме того, схема, основанная на малой соте, должна модифицировать интерфейс Х2. Однако, схема, основанная на оборудовании пользователя, имеет более высокую точность и большую степень осуществимости, но может увеличить сложность на стороне оборудования пользователя.
c) сигнал обнаружения малой соты на макро-уровне
Базовая станция малой соты передает сигнал обнаружения соты (состоящий из первичного сигнала синхронизации (PSS), вторичного сигнала синхронизации (SSS) и системной информации) в полосе рабочей частоты макросоты. Таким образом, оборудование пользователя может рассматривать малую соту, как общую соту, на той же частоте и выполнять нормальные процедуры, такие как отчетность об измерениях, и т.п. Затем базовая станция может немедленно инициировать передачу мобильного оборудования пользователя, или может обеспечить выполнение оборудованием пользователя измерение соты на разных частотах. Такая схема является относительно простой, но существует проблема, состоящая в том, что возникает взаимная помеха между сигналом обнаружения малой соты и сигналом макросоты, и что выполнение оборудованием пользователя может происходить с определенной задержкой. Кроме того, не может быть обеспечена прямая совместимость, и, таким образом, традиционные пользователи могут не принять и могут не выполнять передачу соответствующих сигналов.
Поэтому, предполагается предоставить устройство и способ в системе беспроводной передачи данных для улучшения эффективности обнаружения малой соты, обеспечивая, таким образом, стабильный сетевой охват без стыков для пользователя.
Сущность изобретения
В соответствии с вариантом осуществления изобретения, предусмотрено устройство в системе беспроводной передачи данных, устройство, включающее в себя: модуль получения информации о положении, для получения информации о положении оборудования пользователя; модуль оценки состояния мобильности, для оценки состояния мобильности оборудования пользователя, в соответствии с информацией о положении оборудования пользователя, полученной в разное время; и исполнительный модуль для исполнения соответствующих операций, относящихся к детектированию малой соты, в соответствии с изменениями в состоянии мобильности и информацией о положении оборудования пользователя.
В соответствии с устройством, модуль получения информации о положении выполняет определение положения для оборудования пользователя, в соответствии со временем прохождения сигнала в прямом и обратном направлениях и углом прибытия, который получают путем выполнения измерения в оборудовании пользователя для получения информации о положении оборудования пользователя, в котором время прохождения сигнала в прямом и обратном направлениях получают путем выполнения измерения в оборудовании пользователя, используя информацию упреждения по времени оборудования пользователя в модуле получения информации о положении.
В соответствии с устройством, модуль получения информации о положении выполняет измерение в оборудовании пользователя множество раз, в заданном цикле выборки, в пределах заданного окна времени выборки, для получения множества измерений времени прохождения сигнала в прямом и обратном направлениях и множества углов прибытия.
В соответствии с устройством, модуль получения информации о положении рассчитывает коэффициент коррекции ошибок, используя результат измерений, получаемых с применением системы Глобальной спутниковой навигации, в качестве опорного значения, и корректирует положение, используя коэффициент коррекции ошибок.
В соответствии с устройством, операции, относящиеся к детектированию малой соты, которые выполняет исполнительный модуль, включают в себя одну или больше из следующих операций: определение, в соответствии с расстоянием между оборудованием пользователя и малой сотой, приближается ли оборудование пользователя к малой соте, или определение, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты.
В соответствии с устройством, модуль оценки состояния мобильности дополнительно выполнен с возможностью расчета скорости движения и/или направления движения оборудования пользователя, в соответствии с множеством информации о положении оборудования пользователя, получаемой в разное время.
В соответствии с устройством, множество информации о положении оборудования пользователя в разное время получают в заданном цикле получения, и исполнительный модуль дополнительно выполнен с возможностью обновления цикла получения оборудования пользователя, в соответствии с текущей скоростью движения оборудования пользователя.
В соответствии с устройством, модуль оценки состояния мобильности дополнительно выполнен с возможностью классификации скорости движения оборудования пользователя на разные уровни скорости, и исполнительный модуль дополнительно выполнен с возможностью классификации на разные области, используя критерии разделения области, соответствующие уровням скорости оборудования пользователя, положения, где расположено оборудование пользователя.
В соответствии с устройством, модуль оценки состояния мобильности дополнительно выполнен с возможностью определения удаления границы, соответствующей малой соте, в соответствии с магнитудой скорости движения оборудования пользователя, и исполнительный модуль дополнительно выполнен с возможностью определения, путем сравнения расстояния между оборудованием пользователя и малой сотой с удалением границы, приближается ли оборудование пользователя к малой соте.
В соответствии с устройством, модуль оценки состояния мобильности дополнительно выполнен с возможностью классификации малых сот, расположенных рядом друг с другом в один кластер, и для расчета объединения значений удаления границы, в соответствии с соответствующими малыми сотами в одном кластере, в качестве удаления границы, соответствующего одному кластеру.
В соответствии с устройством, множество информации о положении оборудования пользователя в разные моменты времени получают в заданном цикле получения, и исполнительный модуль дополнительно выполнен с возможностью установки более длительного цикла получения, если оборудование пользователя расположено за пределами удаления границы, и для установки более короткого цикла получения, если оборудование пользователя расположено в пределах удаления границы.
В соответствии с устройством, исполнительный модуль дополнительно выполнен с возможностью определения, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты, в случае, когда оборудование пользователя расположено в пределах удаления границы, исходное условие представляет собой одно или больше из: оборудование пользователя не находится в состоянии мобильности с высокой скоростью; и малая сота находится в хорошем состоянии по нагрузке и имеет остаточные ресурсы для доступа оборудования пользователя.
В соответствии с устройством, модуль оценки состояния мобильности дополнительно выполнен с возможностью расчета, в соответствии с информацией о положении, скорости движения и направления движения оборудования пользователя, времени пребывания, требуемого для оборудования пользователя для перемещения через малую соту, и для сравнения расчетного времени пребывания с заданным пороговым значением времени пребывания, для оценки, находится ли оборудование пользователя в состоянии мобильности с невысокой скоростью.
В соответствии с устройством, оно дополнительно включает в себя модуль определения измерений малой соты на разных частотах, предназначенный для определения, следует ли инициировать измерение соседних сот на разных частотах в оборудовании пользователя.
В соответствии с устройством, модуль оценки состояния мобильности дополнительно выполнен с возможностью расчета, в соответствии с информацией о положении, скорости движения и направления движения оборудования пользователя, времени реакции для прибытия оборудования пользователя в зоне охвата малой соты, и модуль определения измерений соседней соты на разных частотах дополнительно выполнен с возможностью сравнения расчетного времени реакции с заданным пороговым значением времени реакции для определения, следует ли инициировать измерение соседней соты на разных частотах в оборудовании пользователя.
В соответствии с устройством, модуль оценки состояния мобильности дополнительно выполнен с возможностью разделения удаления границы на множество подобластей, каждая подобласть, соответствующая заданной вероятности инициирования, и дополнительно выполнен с возможностью определения, в соответствии с информацией о положении оборудования пользователя, подобласти, где расположено оборудование пользователя и его соответствующей вероятности инициирования; и модуль определения измерения соседней соты на разных частотах дополнительно выполнен с возможностью инициирования измерения соседней соты на разных частотах в оборудование пользователя, в соответствии с определенной вероятностью инициирования соответствующей подобласти, где находится оборудование пользователя.
В соответствии с устройством, оно дополнительно включает в себя модуль определения доступа к соседней соте на разных частотах, в соответствии с отчетом об измерениях оборудования пользователя и информации о положении оборудования пользователя, следует ли инициировать передачу оборудования пользователя в соте на разных частотах и/или загрузку несущей оборудования пользователя, в случае, когда в оборудовании пользователя было инициировано измерение соседней соты на разных частотах.
В соответствии с другим вариантом осуществления изобретения, предусмотрен способ для использования в системе беспроводной передачи данных, способ, включающий в себя: этап получения информации о положении, состоящий в получении информации о положении оборудования пользователя; этап оценки состояния мобильности, состоящий в оценке состояния мобильности оборудования пользователя в соответствии с информацией о положении оборудования пользователя в разное время; и этап выполнения, состоящий в выполнении соответствующих операций, относящихся к детектированию малой соты, в соответствии с изменениями в состоянии мобильности, и информацией о положении оборудования пользователя.
В соответствии со способом, на этапе получения информации о положении, выполняют определение положения для оборудования пользователя в соответствии со временем прохождения сигнала в прямом и обратном направлениях и углом прибытия, которые получают путем выполнения измерения в оборудовании пользователя, для получения информации о положении оборудования пользователя, в котором время прохождения сигнала в прямом и обратном направлениях получают путем выполнения измерения в оборудовании пользователя, используя информацию опережения по времени оборудования пользователя.
В соответствии со способом, на этапе получения информации о положении, выполняют измерение в оборудовании пользователя множество раз, в заданном цикле выборки, в пределах определенного окна времени выборки для получения множества значений времени прохождения сигнала в прямом и обратном направлениях и множества углов прибытия. '
В соответствии со способом, на этапе получения информации о положении, рассчитывают коэффициент коррекции ошибок, используя результат измерений, полученных с помощью системы Глобальной спутниковой навигации, в качестве опорного значения, и корректируют определенное положение, используя коэффициент коррекции ошибок.
В соответствии со способом, операции, относящиеся к детектированию малой соты, которые выполняют на этапе исполнения, включают в себя одно или больше из: определяют, в соответствии с расстоянием между оборудованием пользователя и малой сотой, приближается ли оборудование пользователя к малой соте, или определяют, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты.
В соответствии со способом, на этапе оценки состояния мобильности, скорость движения и/или направление движения оборудования пользователя дополнительно рассчитывают в соответствии с множеством информации о положении оборудования пользователя в разные моменты времени.
В соответствии со способом, множество информации о положении оборудования пользователя в разное время получают в заданном цикле получения, и на этапе исполнения, цикл получения оборудования пользователя дополнительно обновляют в соответствии с текущей скоростью движения оборудования пользователя.
В соответствии со способом, на этапе оценки состояния мобильности, скорость движения оборудования пользователя дополнительно классифицируют по разным уровням скорости, и на этапе исполнения, положение, где расположено оборудование пользователя, дополнительно классифицируют по разным областям, используя критерии разделения области, в соответствии с уровнями скорости оборудования пользователя.
В соответствии со способом, на этапе оценки состояния мобильности, удаление границы, соответствующей малой соте, дополнительно определяют в соответствии с магнитудой скорости движения оборудования пользователя, и на этапе исполнения дополнительно определяют, путем сравнения расстояния между оборудованием пользователя и малой сотой с удалением границы, приближается ли оборудование пользователя к малой соте.
В соответствии со способом, на этапе оценки состояния мобильности, малые соты, расположенные рядом друг с другом, дополнительно классифицируют в один кластер, и объединение значений удаления границы, соответствующих соответствующим малым сотам в одном и том же кластере, рассчитывают как удаление границы, соответствующее одному кластеру.
В соответствии со способом, множество информации о положении оборудования пользователя в разное время получают в заданном цикле получения, и на этапе исполнения: устанавливают более длительный цикл получения, если оборудование пользователя расположено за пределами удаления границы; и устанавливают более короткий цикл получения, если оборудование пользователя расположено внутри удаления границы.
В соответствии со способом, на этапе исполнения, дополнительно определяют, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты, в случае, когда оборудование пользователя расположено в пределах удаления границы, исходное условие представляет собой одно или больше из: оборудование пользователя находится в состоянии мобильности с невысокой скоростью; и малая сота находится в хорошем состоянии по нагрузке и имеет остаточные ресурсы для доступа оборудования пользователя.
В соответствии со способом, на этапе оценки состояния мобильности, время пребывания, требуемое для оборудования пользователя, для прохода через малую соту, дополнительно рассчитывают в соответствии с информацией о положении, скорости движения и направлении движения оборудования пользователя, и рассчитанное времени пребывания сравнивают с заданным пороговым значением времени пребывания для оценки, находиться ли оборудование пользователя в состоянии мобильности с невысокой скоростью.
В соответствии со способом, он дополнительно включает в себя этап определения измерения соседней соты на разных частотах, состоящий в определении, следует ли инициировать измерение соседней соты на разных частотах в оборудовании пользователя.
В соответствии со способом, на этапе оценки состояния мобильности, время реакции прибытия оборудования пользователя в зону охвата малой соты дополнительно рассчитывают в соответствии с информацией о положении, скоростью движения и направлением движения оборудования пользователя, и на этапе определения измерения соседней соты на разных частотах, рассчитанное время реакции дополнительно сравнивают с заданным пороговым значением времени реакции для определения, следует ли инициировать измерение соты на разных частотах в оборудовании пользователя.
В соответствии со способом, на этапе оценки состояния мобильности, удаление границы дополнительно разделяют на множество подобластей, каждая подобласть, соответствующая заданной вероятности инициирования, и подобласти, где расположено оборудование пользователя, и дополнительно определяют его соответствующую вероятность инициирования в соответствии с информацией о положении оборудования пользователя; и на этапе определения измерения соседней соты на разных частотах дополнительно инициируют измерение соседней соты на разных частотах в оборудовании пользователя в соответствии с заданной вероятностью инициирования соответствующей подобласти, где расположено оборудование пользователя.
В соответствии со способом, он дополнительно включает в себя этап определения доступа к соседней соте на разных частотах, состоящий в определении, в соответствии с отчетом об измерениях оборудования пользователя и информацией о положении оборудования пользователя, следует ли инициировать передачу оборудования пользователя в соте на разных частотах и/или загрузку несущей оборудования пользователя, в случае, когда было инициировано измерение соседней соты на разных частотах оборудования пользователя.
В соответствии с другим вариантом осуществления изобретения, предусмотрено устройство в системе беспроводной передачи данных, устройство, включающее в себя: модуль измерения угла прибытия, состоящий в измерении угла прибытия сигнала, переданного из оборудования пользователя в базовую станцию; модуль измерения времени прохождения сигнала в прямом и обратном направлениях, которое требуется для одного прохождения сигнала в прямом и обратном направлениях между оборудованием пользователя и базовой станцией; и модуль определения положения, предназначенный для определения положения оборудования пользователя, в соответствии с углом прибытия и временем прохождения сигнала в прямом и обратном направлениях, в котором модуль измерения времени прохождения сигнала в прямом и обратном направлениях получает время прохождения сигнала в прямом и обратном направлениях, путем выполнения измерения в оборудовании пользователя, используя опережение по времени оборудования пользователя.
В соответствии с устройством, оно дополнительно включает в себя модуль приема, предназначенный для приема информации о расположении из системы Глобальной спутниковой навигации, предоставляемой в отчете оборудования пользователя; и модуль коррекции для расчета коэффициента коррекции ошибок, используя информацию о расположении из системы Глобальной спутниковой навигации, в качестве опорного значения и коррекции положения, используя коэффициент коррекции ошибок.
В соответствии с другим вариантом осуществления изобретения, предусмотрен способ для использования в системе беспроводной передачи данных, способ, включающий в себя: этап измерения, состоящий в измерении угла прибытия сигнала, переданного оборудованием пользователя в базовую станцию; этап измерения времени прохождения сигнала в прямом и обратном направлениях, состоящий в измерении времени прохождения сигнала в прямом и обратном направлениях, которое требуется для одного прохождения в прямом и обратном направлениях сигнала между оборудованием пользователя и базовой станцией; и этап установления положения, состоящий в установлении положения оборудования пользователя, в соответствии с углом прибытия и временем прохождения сигнала в прямом и обратном направлениях, в котором на этапе измерения времени прохождения сигнала в прямом и обратном направлениях, время прохождения сигнала в прямом и обратном направлениях получают путем выполнения измерения в оборудовании пользователя, используя опережение по времени оборудования пользователя.
В соответствии со способом, он дополнительно включает в себя этап приема, состоящий в приеме информации о положении, определенном системой Глобальной спутниковой навигации, представляемой в отчете оборудования пользователя; и этап коррекции, состоящий в расчете коэффициента коррекции ошибок, используя информацию о положении из системы Глобальной спутниковой навигации, в качестве опорного значения и коррекции положения, используя коэффициент коррекции ошибок.
В соответствии с другим вариантом осуществления изобретения, предусмотрен компьютерный носитель информации, содержащий считываемые компьютером инструкции, которые используются для обеспечения выполнения компьютером: этапа получения информации о положении, состоящего в получении информации о положении оборудования пользователя; этапа оценки состояния мобильности, состоящего в получении состояния мобильности оборудования пользователя, в соответствии с информацией о положении оборудования пользователя в разное время; и этапа исполнения, состоящего в исполнении соответствующих операций, относящихся к детектированию малой соты, в соответствии с изменениями в состоянии мобильности и информацией о положении оборудования пользователя.
В соответствии с другим вариантом осуществления изобретения, предусмотрен компьютерный носитель информации, содержащий считываемые компьютером инструкции, которые используются для обеспечения выполнения компьютером: этапа измерения угла прибытия, состоящего в измерении угла прибытия сигнала, переданного оборудованием пользователя в базовую станцию; этапа измерения времени прохождения сигнала в прямом и обратном направлениях, состоящего в измерении времени прохождения сигнала в прямом и обратном направлениях, для одного прохождения в прямом и обратном направлениях сигнала между оборудованием пользователя и базовой станцией; и этапа определения положения, состоящего в определении положения оборудования пользователя, в соответствии с углом прибытия и временем прохождения сигнала в прямом и обратном направлениях, в котором на этапе измерения времени прохождения сигнала в прямом и обратном направлениях, время прохождения сигнала в прямом и обратном направлениях получают путем выполнения измерения в оборудовании пользователя, используя опережение по времени оборудования пользователя.
С помощью данного изобретения становится возможным выполнять соответствующие операции, относящиеся к детектированию малой соты, в соответствии с изменениями состояния мобильности и информацией о положении оборудования пользователя, улучшая, таким образом, эффективность при детектировании малой соты и дополнительно обеспечивая для пользователя стабильный сетевой охват без стыков.
Краткое описание чертежей
Представленные выше и другие цели, свойства и преимущества изобретения будут более понятными со ссылкой на описание вариантов осуществления, представленное ниже совместно с приложенными чертежами, на которых идентичные или соответствующие номера ссылочных позиций обозначают идентичные или соответствующие технические свойства или компоненты.
На фиг. 1 представлена блок-схема, иллюстрирующая конфигурацию устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения;
на фиг. 2 представлена схема, иллюстрирующая Тип 1 для измерения времени прохождения сигнала в прямом и обратном направлениях и подход для измерения времени прохождения сигнала в прямом и обратном направлениях, в соответствии с вариантом осуществления изобретения;
на фиг. 3 представлена схема, иллюстрирующая разделение зоны охвата базовой станции, в соответствии с вариантом осуществления изобретения;
на фиг. 4 представлена схема, иллюстрирующая оценку состояния мобильности оборудования пользователя, в соответствии с вариантом осуществления изобретения;
на фиг. 5 представлена блок-схема, поясняющая другую конфигурацию устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения;
на фиг. 6 представлена блок-схема, поясняющая еще одну конфигурацию устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения;
на фиг. 7 представлена блок-схема последовательности операций, поясняющая способ для использования в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения;
на фиг. 8 представлена блок-схема последовательности операций, поясняющая способ для использования в системе беспроводной передачи данных, в соответствии с другим вариантом осуществления изобретения;
на фиг. 9 представлена блок-схема последовательности операций, поясняющая способ для использования в системе беспроводной передачи данных, в соответствии с другим вариантом осуществления изобретения;
на фиг. 10 представлена конфигурация, иллюстрирующая блок-схему устройства в системе беспроводной передачи данных, в соответствии с другим вариантом осуществления изобретения;
на фиг. 11 представлена блок-схема последовательности операций, поясняющая способ для использования в системе беспроводной передачи данных, в соответствии с другим вариантом осуществления изобретения; и
на фиг. 12 схематично показана блок-схема, иллюстрирующая устройство обработки информации, которое может использоваться для выполнения варианта осуществления изобретения.
Подробное описание изобретения
Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на приложенные чертежи. Следует отметить, что для ясности представления и описания компоненты и обработка, которые обычно известны специалисту в данной области техники и не относятся к изобретению, исключены на чертежах и в описании.
Конфигурация устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения, описана со ссылкой на фиг. 1, представленную ниже. Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства в системе беспроводной передачи данных в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 1, устройство 100 в системе беспроводной передачи данных может включать в себя модуль 102 получения информации о положении, модуль 104 оценки состояния мобильности и исполнительный модуль 106.
Модуль 102 получения информации о положении может получать информацию о положении оборудования пользователя.
Информация о положении оборудования пользователя представляет собой одну из важной информации, предоставляемой на сторону сети. В соответствии с информацией о положении оборудования пользователя, сторона сети может более точно выполнять процедуру детектирования малой соты.
В частности, модуль 102 получения информации о положении может получать информацию о положении оборудования пользователя, используя множество подходов. Например, модуль 102 получения информации о положении может получать информацию о положении оборудования пользователя путем определения положения оборудования пользователя. Кроме того, например, модуль 102 получения информации о положении может получать информацию о положении оборудования пользователя, принимая результат измерений системы Глобальной спутниковой навигации (GNSS), передаваемый в отчете оборудования пользователя, и GNSS может представлять собой, например, Систему глобальной навигации (GPS).
В соответствии с одним вариантом осуществления изобретения, модуль 102 получения информации о положении может устанавливать положение оборудования пользователя в соответствии со временем прохождения сигнала в прямом и обратном направлениях и углом прибытия, полученными при выполнении измерений в оборудовании пользователя, для получения информации о положении оборудования пользователя. В частности, время прохождения сигнала в прямом и обратном направлениях получают, выполняя измерение в оборудовании пользователя в модуле 102 получения, используя информацию опережения по времени оборудования пользователя.
В 3GPP 36.305 определено множество способов для установления положения в оборудовании пользователя, например, GNSS с использованием стороны сети (A-GNSS), установка положения нисходящего канала передачи, улучшенная установка положения Cell-ID (E-CID), установка положения восходящего канала передачи и т.п. Различные способы, для установления положения оборудования пользователя, описанные выше, могут быть выполнены, используя разные подходы к воплощению, которые, в частности, представлены в таблице 1.

В E-CID используется географическое знание обслуживающей соты об оборудовании пользователя. Кроме того, для улучшения точности, могут быть дополнительно приняты измерения, выполняемые оборудованием пользователя и/или eNodeB. В качестве конкретных подходов к воплощению Е-CID, например, положение оборудования пользователя может быть установлено в соответствии со временем прохождения сигнала в прямом и обратном направлениях (RTT) и углом прибытия (АоА), полученными при выполнении измерения в оборудовании пользователя.
Для обеспечения простоты и эффективности схемы в целом, изобретение устанавливает положение оборудования пользователя, используя подход к воплощению, состоящий в измерении времени прохождения сигнала в прямом и обратном направлениях и угла прибытия в Е-CID. В частности, время прохождения сигнала в прямом и обратном направлениях и угол прибытия измеряют на стороне базовой станции. Расстояние между оборудованием пользователя и базовой станцией может быть определено путем измерения времени прохождения сигнала в прямом и обратном направлениях. Кроме того, направление между оборудованием пользователя и базовой станцией может быть определено путем измерения угла прибытия. В соответствии с определенным расстоянием и направлением между оборудованием пользователя и базовой станцией, может быть получено относительное положение между оборудованием пользователя и базовой станцией. Поскольку измерение времени прохождения сигнала в прямом и обратном направлениях и угла прибытия выполняют на стороне базовой станции, поток обработки для установления положения оборудования пользователя может быть упрощен, и совместимость с существующим стандартом может быть реализована без добавления дополнительной нагрузки на оборудование пользователя.
Угол прибытия может быть измерен различными путями. Например, антенная решетка на стороне базовой станции может отслеживать сигнал восходящего канала передачи, переданный оборудованием пользователя, и может измерять угол прибытия сигнала восходящего канала передачи, таким образом, определяя направление между оборудованием пользователя и базовой станцией. В качестве примера, сигнал восходящего канала передачи, переданный оборудованием пользователя, может представлять собой сигнал SR, сигнал DMR и т.п.
Кроме того, время прохождения сигнала в прямом и обратном направлениях может быть измерено различными способами. Например, время прохождения сигнала в прямом и обратном направлениях может быть определено в соответствии с измерением времени, в которое оборудование пользователя или базовая станция передает/принимают n-ый подфрейм. В 3GPP 36.305, определены два подхода для измерения времени прохождения сигнала в прямом и обратном направлениях, то есть, Тип 1 и Тип 2. Тип 1 и Тип 2 для измерения времени прохождения сигнала в прямом и обратном направлениях сравниваются в следующей таблице 2.

В Типе 2 для измерения времени прохождения сигнала в прямом и обратном направлениях базовая станция получает время прохождения сигнала в прямом и обратном направлениях путем инициирования специализированной процедуры случайного доступа, для измерения времени прибытия сигнала преамбулы, переданного оборудованием пользователя. В системе LTE время, в которое оборудование пользователя передает сигнал преамбулы, основано на времени, в которое оборудование пользователя принимает сигнал нисходящего канала передачи, без передачи заранее. Поэтому, время, в которое сигнал преамбулы, переданный оборудованием пользователя, поступает в базовую станцию, составляет двойное время задержки передачи в одну сторону. Как можно видеть из представленного выше, схема воплощения Типа 2 для измерения времени прохождения сигнала в прямом и обратном направлениях проще, где базовая станция может независимо выполнять измерения и определять положение для оборудования пользователя, но при этом требуется использовать канал PRACH.
Тип 1 для измерений времени прохождения сигнала в прямом и обратном направлениях и подход для измерения времени прохождения сигнала в прямом и обратном направлениях, в соответствии с вариантом осуществления изобретения, будет описан ниже со ссылкой на фиг. 2. На фиг. 2 показана схема, иллюстрирующая Тип 1 для измерения времени прохождения сигнала в прямом и обратном направлениях и подход для измерения времени прохождения сигнала в прямом и обратном направлениях, в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 2, на оси абсцисс обозначено время Т. Время t1 обозначает время, в которое оборудование пользователя передает n-ый подфрейм, время t2 обозначает время, в которое базовая станция передает n-ый подфрейм, время t3 обозначает время, в которое базовая станция принимает n-ый подфрейм, и время t4 обозначает время, в которое оборудование пользователя принимает n-ый подфрейм. Кроме того, как показано на фиг. 2, опережение по времени ТА обозначает время, на которое момент времени t1, в который оборудование пользователя передает n-ый подфрейм, опережает момент времени t2, в который базовая станция передает n-ый подфрейм, то есть, TA=t2-t1.
В соответствии с Типом 1, для измерения времени прохождения сигнала в прямом и обратном направлениях, время прохождения сигнала в прямом и обратном направлениях RTT равно разности по времени (t3-t2) между временем t3, в которое базовая станция принимает n-ый подфрейм, и временем t2, в которое базовая станция передает n-ый подфрейм, или разности по времени (t4-t1) между временем t4, в которое оборудование пользователя принимает n-ый подфрейм, и временем t1, в которое оборудование пользователя передает n-ый подфрейм, то есть, RTT=(t3-t2)+(t4-t1))/2. Для получения дополнительной информации относительно Типа 1 можно сделать ссылку на измерение времени прохождения сигнала в прямом и обратном направлениях, в секции 8.3.1 в 3GPP 36.305 и в секции "19.4.2" в "LTE-The UMTS Long Term Evolution: From Theory to Practice (Second Edition)".
Используя подход для измерения времени прохождения сигнала в прямом и обратном направлениях, в соответствии с вариантом осуществления изобретения, время прохождения сигнала в прямом и обратном направлениях RTT равно разности времени между моментом времени t3, в который базовая станция принимает n-ый подфрейм, и моментом времени t1, в который оборудование пользователя передает n-ый подфрейм, то есть, RTT=t3-t1. Как описано выше, опережение по времени ТА=t2-t1, тогда t1=t2-ТА. Если подставить t1=t2-ТА в RTT=t3-t1, можно получить, что RTT=t3-(t2-ТА)=t3-t2+ТА. Как можно видеть из представленного выше, время RTT прохождения сигнала в прямом и обратном направлениях, полученное таким подходом для измерения времени прохождения сигнала в прямом и обратном направлениях, в соответствии с вариантом осуществления изобретения, равно разности по времени (t3-t2) между временем t3, в которое базовая станция принимает n-ый подфрейм, и временем t2, в которое базовая станция передает n-ый подфрейм, плюс опережение по времени ТА. Поэтому, используя подход для измерения времени прохождения сигнала в прямом и обратном направлениях, в соответствии с вариантом осуществления изобретения, базовая станция может использовать информацию об опережении по времени ТА оборудования пользователя, для завершения измерений времени прохождения сигнала в прямом и обратном направлениях, независимо, без помощи со стороны оборудования пользователя. Далее, по сравнению с Типом 2, для измерения времени прохождения сигнала в прямом и обратном направлениях, подход для измерения времени прохождения сигнала в прямом и обратном направлениях, в соответствии с вариантом осуществления изобретения, не ограничен сигналом преамбулы, используемым в канале PRACH, и, таким образом, имеет более широкий диапазон применения.
После измерения времени прохождения сигнала в прямом и обратном направлениях RTT расстояние L между базовой станцией и оборудованием пользователя может быть представлено, как L=с×RTT/2, в котором с представляет собой скорость радиоволны в воздухе при широковещательной передаче.
В соответствии с вариантом осуществления изобретения, модуль 102 получения информации о положении может выполнять измерение в оборудовании пользователя множество раз в заданном цикле выборки, в пределах заданного окна времени выборки, для получения множества значений времени прохождения сигнала в прямом и обратном направлениях и множества углов прибытия.
Когда выполняют измерение угла прибытия и времени прохождения сигнала в прямом и обратном направлениях в фактической среде передачи данных, всегда существует ошибка при измерении угла прибытия и времени прохождения сигнала в прямом и обратном направлениях, из-за влияния эффекта многолучевого распространения. Для уменьшения ошибки измерений из-за эффекта многолучевого распространения, период времени может быть заранее установлен, как временное окно выборки. Измерение может быть выполнено в оборудовании пользователя множество раз в заданном цикле выборки, в пределах временного окна выборки, для получения множества значений времени прохождения сигнала в прямом и обратном направлениях и множества углов прибытия.
Например, в момент времени t, базовая станция должна получить информацию о положении оборудования пользователя. Затем базовая станция конфигурирует временное окно выборки с длительностью ΔΤ в момент времени t. В пределах временного окна выборки от момента времени t до момента времени t+ΔΤ, базовая станция выполняет измерение, используя оборудование пользователя множество раз в цикле выборки Ts, для получения множества значений времени прохождения сигнала в прямом и обратном направлениях и множества углов прибытия. Когда ΔΤ достаточно мало, расстояние перемещения оборудования пользователя в пределах такого временного окна выборки будет невелико. Поэтому, среди множества значений времени прохождения сигнала в прямом и обратном направлениях и множества углов прибытия, измеренных в течение временного окна выборки, сигнал с наименьшим временем для прибытия подвергается меньшему количеству отражений, и при этом он, весьма вероятно, прошел по прямому пути или по приближению к прямому пути. Поэтому, в качестве примера, положение оборудования пользователя в момент времени t может быть определено следующим образом: точки с плохими значениями удаляют из измеренных множества значений времени прохождения сигнала в прямом и обратном направлениях и множества значений углов прибытия для получения n значений времени прохождения сигнала в прямом и обратном направлениях {RTT1, RTT2, …, RTTn} и n углов прибытия {θ1, θ2, …, θn} при удаленных точках плохих значений; минимальное значение среди η значений времени прохождения сигнала в прямом и обратном направлениях {RTT1, RTT2, RTTn} рассчитывают, как конечное время прохождения сигнала в прямом и обратном направлениях RTTF, то есть, RTTF=min{RTT1, RTT2, RTTn}; среднее значение среди n углов прибытия {θ1, θ2, …, θn} рассчитывают, как конечный угол прибытия AoAF, то есть, АоАF=Mean {θ1, θ2, …, θn}; и положение оборудования пользователя в момент времени t может быть определено в соответствии с рассчитанным конечным значением времени прохождения сигнала в прямом и обратном направлениях RTTF и конечным значением угла прибытия АоАF.
Установка описанного выше временного окна выборки может соответствовать следующему принципу: длительность установленного временного окна выборки должна быть адекватной, поскольку, если длина временного окна выборки будет установлена слишком длительной, ресурсы базовой станции могут быть чрезмерно заняты, и измерение может быть неточным; и, кроме того, если длина временного окна выборки будет установлена слишком короткой, цель улучшения точности положения может не быть достигнута.
В соответствии с вариантом осуществления изобретения, модуль 102 получения информации о положении рассчитывает коэффициент коррекции ошибок, используя результат измерений, полученный с помощью системы Глобальной спутниковой навигации, в качестве опорного значения, и корректирует положение, используя коэффициент коррекции ошибок.
Способ установления положения, используя систему Глобальной спутниковой навигации, имеет характеристики высокой точности. Кроме того, при широком распространении интеллектуального оборудования пользователя, все больше и больше экземпляров оборудования пользователя имеют функцию системы Глобальной спутниковой навигации. Поэтому, в соответствии с вариантом осуществления изобретения, результат измерения системы Глобальной спутниковой навигации может использоваться для коррекции ошибки при установлении положения по времени прохождения сигнала в прямом и обратном направлениях, таким образом, дополнительно улучшая точность при установлении положения оборудования пользователя. В частности, коэффициент коррекции ошибок βRTT может быть рассчитан, используя результат измерений системы Глобальной спутниковой навигации, как стандартное значение, и установление положения, выполненное, используя время прохождения сигнала в прямом и обратном направлениях, может быть скорректировано, используя рассчитанный коэффициент коррекции ошибки βRTT.
Конечно, сцена использования системы Глобальной спутниковой навигации не ограничена этим. Например, если ошибка между результатом измерений угла прохода и время на прохождение сигнала в прямом и обратном направлениях и результатом измерения системы Глобальной спутниковой навигации является слишком большой, или если протяженность соты настолько мала, что точность установления положения угла прибытия и времени прохождения сигнала в прямом и обратном направлениях не могут удовлетворять заданным требованиям, тогда установление положения может быть выполнено, используя только систему Глобальной спутниковой навигации. Таким образом, как описано выше, модуль 102 получения информации о положении может получать информацию о положении оборудования пользователя, принимая результат измерений системы Глобальной спутниковой навигации (GNSS), передаваемой в отчете оборудования пользователя, в котором система Глобальной спутниковой навигации (GNSS) может, например, представлять собой Систему глобальной навигации (GPS). Кроме того, когда для базовой станции требуется более точная информация о положении, например, когда инициируется измерение соседней соты на разных частотах, базовая станция также может потребовать, чтобы оборудование пользователя немедленно предоставило отчет с результатом измерений системы Глобальной спутниковой навигации.
В соответствии с вариантом осуществления изобретения, когда установление положения оборудования пользователя, используя угол прибытия и время прохождения сигнала в прямом и обратном направлениях в базовой станции заканчивается, запрос на установление положения инициируется на конце базовой станции и измерение угла прибытия, и времени прохождения сигнала в прямом и обратном направлениях выполняют независимо на конце базовой станции, реализуя, таким образом, устанавливая положение оборудования пользователя. Поэтому, используя способ установления положения в соответствии с вариантом осуществления изобретения, становится возможным упростить поток обработки для установления положения оборудования пользователя и уменьшить степень использования ресурсов передачи сигналов по сети, без получения соответствующей задержки по времени, улучшая, таким образом, эффективность установления положения оборудования пользователя.
Для специалиста в данной области техники будет понятно, что представленный выше подход для определения положения оборудования пользователя является только примером, и другие способы для установления положения оборудования пользователя также можно использовать. Кроме того, описанный выше способ для установления положения оборудования пользователя также можно применять в других ситуациях. Например, описанный выше способ для установления положения оборудования пользователя также можно применять в следующих ситуациях: обеспечение установления положения оборудования пользователя в сценах использования вызова автомобиля скорой помощи и неотложных вызовов; предоставление услуги информации на основе положения, например, информации о навигации и услуги указания пути и т.п.; услуги инициирования определения положения, например, администрирование на основе положения и начисления счетов и т.п.; таких услуг, как отслеживание и администрирование недвижимостью, планирование/отслеживание движения транспортного средства, логистический мониторинг, опека за престарелыми людьми/детьми и т.п.
Снова возвращаясь к фиг. 1, модуль 104 оценки состояния мобильности в устройстве 100 может оценивать состояние мобильности оборудования пользователя, в соответствии с информацией о положении оборудования пользователя в разное время.
Модуль 104 оценки состояния мобильности может получать множество информации о положении оборудования пользователя в разное время в соответствии с описанным выше способом для получения информации о положении оборудования пользователя. Например, модуль 104 оценки состояния может получать информацию p1 о положении в момент времени t1, информацию р2 о положении в момент времени t2, …, информацию pi о положении в момент времени ti, …, информацию pj о положении в момент времени tj, …, информацию рn о положении в момент времени tn оборудования пользователя, соответственно, где i, j и n представляют собой натуральные числа и 1≤i≤n, 1≤j≤n. Период времени (ti-tj) между временем ti и временем tj может быть получен в соответствии с двумя моментами времени, и расстояние (pi-pj) до оборудования пользователя в течение периода времени (ti-tj) может быть получено в соответствии с информацией pi о положении и информацией pj о положении. В соответствии с полученными множеством периодов (ti-tj) времени и соответствующими расстояниями (pi-pj) перемещения оборудования пользователя в течение соответствующих периодов (ti-tj) времени, может быть получена оценка состояния мобильности оборудования пользователя, например, движется ли оборудование пользователя с высокой скоростью, средней скоростью или низкой скоростью, или движется ли оборудование пользователя в направлении к или в направлении от малой соты, и т.п.
В соответствии с вариантом осуществления изобретения, модуль 104 оценки состояния мобильности, кроме того, выполнен с возможностью расчета скорости движения и/или направления движения оборудования пользователя, в соответствии с множеством информации о положении оборудования пользователя, полученной в разное время.
В соответствии с представленным выше примером, скорость движения оборудования пользователя в течение периода времени (ti-tj) может быть получена, путем деления расстояния (pi-pj) перемещения оборудования пользователя в течение периода (ti-tj) времени на этот период (ti-tj) времени. Кроме того, в соответствии с множеством информации о положении оборудования пользователя в разные моменты времени, моментальное положение оборудования пользователя может быть оценено, используя способы, например, подгонки кривой или прогнозирования, выполняя, таким образом, оценку направления движения оборудования пользователя.
Кроме того, в оборудовании пользователя также может использоваться информация о положении из системы Глобальной спутниковой навигации для расчета общего расстояния перемещения оборудования пользователя в течение заданного временного интервала, и также может быть получена скорость движения оборудования пользователя в течение данного временного интервала, путем деления общего расстояния движения оборудования пользователя в течение данного временного интервала на заданный временной интервал.
Возвращаясь снова к фиг. 1, исполнительный модуль 106 в устройстве 100 может выполнять соответствующие операции, относящиеся к детектированию малой соты, в соответствии с изменениями в состоянии мобильности и информацией о положении оборудования пользователя.
В общем, следует ли выполнять детектирование малой соты, связано с расстоянием от оборудования пользователя до малой соты. Если оборудование пользователя находится далеко от малой соты, оборудование пользователя имеет малую вероятность прибытия в малую соту, и, таким образом, требуется только приблизительно оценивать состояние мобильности оборудования пользователя. Если оборудование пользователя находится близко к малой соте, тогда оборудование пользователя имеет высокую вероятность прибытия в малую соту, и, таким образом, может потребоваться более точная оценка состояния мобильности оборудования пользователя таким образом, что процедура детектирования малой соты будет запущена в соответствующий момент времени.
В соответствии с вариантом осуществления изобретения, операции, относящиеся к детектированию малой соты, выполняемые исполнительным модулем 106, включают в себя одну или больше из следующих операций: определение, в соответствии с расстоянием между оборудованием пользователя и малой сотой, приближается ли оборудование пользователя к малой соте, или определение, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты.
Например, если процедура детектирования малой соты будет запущена относительно рано, могут быть выполнены ненужные операции, и, таким образом, ресурсы системы будут напрасно израсходованы. Кроме того, если процедура детектирования малой соты будет запущена относительно поздно, это может привести к недостаточному времени для последующих операций, в результате чего, последующие операции не будут выполнены. Поэтому, необходимо запустить процедуру детектирования малой соты в соответствующий момент времени. Для того чтобы запустить процедуру детектирования малой соты в соответствующий момент времени, например, расстояние между оборудованием пользователя и малой сотой может быть рассчитано в соответствии с информацией о положении оборудования пользователя, и приближается ли оборудование пользователя к малой соте, может быть определено в соответствии с рассчитанным расстоянием между оборудованием пользователя и малой сотой. Когда оборудование пользователя, соответственно, приближается к малой соте, можно считать, что целесообразно запустить процедуру детектирования малой соты в это время. Кроме того, когда процедура детектирования малой соты запущена, можно определить, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты. Например, исходное условие детектирования малой соты может представлять собой один или больше из следующих элементов: оборудование пользователя не находится в состоянии мобильности с высокой скоростью, малая сота находится в хорошем состоянии нагрузки и имеет остаточные ресурсы для доступа оборудования пользователя.
В соответствии с вариантом осуществления изобретения, множество информации о положении оборудования пользователя в разное время может быть получено в заданном цикле получения, и исполнительный модуль 106 дополнительно выполнен с возможностью обновления цикла получения оборудования пользователя, в соответствии с текущей скоростью движения оборудования пользователя.
Базовая станция может получать множество информации о положении оборудования пользователя в заданном цикле получения, например, базовая станция может получать информацию о положении оборудования пользователя один раз каждые 500 мс. Кроме того, длину представленного выше цикла получения можно регулировать, например, длину представленного выше цикла получения можно регулировать в соответствии с текущей скоростью движения оборудования пользователя. Например, чем больше скорость движения оборудования пользователя, тем быстрее меняется информация о положении оборудования пользователя, и, таким образом, цикл получения может быть установлен более коротким; и чем меньше скорость движения оборудования пользователя, тем меньше изменяется информация о положении оборудования пользователя, и, таким образом, цикл получения может быть установлен более длинным. Для специалиста в данной области техники также должно быть понятно, что длина цикла получения также может быть отрегулирована в соответствии с другими коэффициентами.
Процедура разделения области охвата базовой станции описана ниже со ссылкой на фиг. 3. На фиг. 3 показана схема, иллюстрирующая разделение области охвата базовой станции в соответствии с вариантом осуществления изобретения.
В соответствии с вариантом осуществления изобретения модуль 104 оценки состояния мобильности дополнительно выполнен с возможностью определения удаления границы, в соответствии с малой сотой, в соответствии с магнитудой скорости движения оборудования пользователя, и исполнительный модуль 106 дополнительно выполнен с возможностью определения, приближается ли оборудование пользователя к малой соте, путем сравнения расстояния между оборудованием пользователя и малой сотой с удалением границы.
Как описано выше, модуль 104 оценки состояния мобильности может рассчитывать скорость движения оборудования пользователя в соответствии с множеством информации о положении оборудования пользователя в разное время. После расчета скорости движения оборудования пользователя модуль 104 оценки состояния мобильности может определять удаление границы, соответствующую малой соте, в соответствии с магнитудой скорости движения оборудования пользователя. В этом изобретении удаление границы, соответствующая малой соте, используется для измерения степени близости между оборудованием пользователя и малой сотой. Оборудование пользователя может не принимать успешно сигнал малой соты в пределах удаления границы, но может, например, приближаться к малой соте. Для оборудования пользователя с разными скоростями движения та же малая сота имеет разное удаление границы, соответственно. Например, чем больше скорость движения оборудования пользователя, тем быстрее оборудование пользователя может приближаться к малой соте, и тем больше определенное удаление границы; и чем меньше скорость движения оборудования пользователя, тем медленнее оборудование пользователя может приближаться к малой соте, и тем меньше определенная удаление границы. В качестве другого примера, модуль 104 оценки состояния мобильности может классифицировать скорость движения оборудования пользователя, как разные уровни, такие как уровень высокой скорости, уровень средней скорости и уровень низкой скорости, и скорости движения на разных уровнях соответствуют разным значениям удаления границы, соответственно. Например, если скорость движения оборудования пользователя представляет собой высокий уровень скорости, тогда соответствующее удаление границы является относительно большим; если скорость движения оборудования пользователя представляет собой низкий уровень скорости, соответствующее удаление границы будет относительно малым; и если скорость движения оборудования пользователя представляет собой средний уровень скорости, соответствующее удаление границы будет находиться между относительно большим удалением границы и относительно малым удалением границы.
Поскольку оборудование пользователя в пределах удаления границы, возможно, приближается к малой соте, модуль 104 оценки состояния мобильности может более тщательно отслеживать оборудование пользователя в пределах удаления границы для оценки состояния мобильности и расчета времени реакции на передачу оборудования пользователя. Поэтому, если удаление границы будет определено как большое, оборудование пользователя, приближающееся к малой соте, может быть раньше подвергнуто тщательному отслеживанию, и, таким образом, точность оценки состояния мобильности может быть улучшена, соответственно, но нагрузка на обработку модуля 104 оценки состояния мобильности может быть увеличена, соответственно. Поэтому, необходимо определять удаление границы, как имеющее соответствующую магнитуду, для реализации компромисса между точностью оценки оборудования пользователя и нагрузкой на обработку. Кроме того, удаление границы дополнительно должно удовлетворять требованию минимального времени реакции на передачу  оборудования пользователя.
оборудования пользователя.
Расчет времени реакции на передачу для прибытия оборудования пользователя в пределы зоны охвата малой соты будет описан со ссылкой на фиг. 4, представленную ниже. Как показано на фиг. 4, текущее положение оборудования пользователя представляет собой (ха, уа), направление движения (угол пересечения стрелки, обозначающей направление перемещения оборудования пользователя относительно горизонтальной линии, как показано на фиг. 4) оборудования пользователя составляет а, и скорость движения оборудования пользователя в положении А (ха, уа) равна v. Кроме того, положение размещения малой соты (то есть, положение размещения точки доступа малой соты) составляет О (хo, уo), и радиус зоны охвата малой соты составляет Rc. Как показано на фиг. 4, время treaction реакции передачи оборудования пользователя равно времени, когда оборудование пользователя достигает зоны охвата (то есть, точка В на фиг. 4) малой соты из текущего положения (ха, уа) с текущей скоростью v движения и направлением а движения, и время treaction реакции при передаче оборудования пользователя в пределах удаления границы должно удовлетворять следующему условию:

Как представлено на фиг. 4, АВ=АС-ВС. Кроме того, как следует из теоремы Пифагора,  , и в соответствии с представленным выше описанием, ОВ=Rc и
, и в соответствии с представленным выше описанием, ОВ=Rc и  затем
затем  . Кроме того, как следует из Теоремы Пифагора,
. Кроме того, как следует из Теоремы Пифагора,  , где
, где  и и, таким образом,
и и, таким образом,  . Подставляя рассчитанные значения АС и ВС в представленную выше формулу АВ=АС-ВС, можно получить
. Подставляя рассчитанные значения АС и ВС в представленную выше формулу АВ=АС-ВС, можно получить  . Поскольку скорость движения оборудования пользователя в положении А (ха, уа) равна v, тогда treaction=AB/v. Кроме того, поскольку время treaction реакции на передачу оборудования пользователя в пределах удаления границы должно удовлетворять следующему условию
. Поскольку скорость движения оборудования пользователя в положении А (ха, уа) равна v, тогда treaction=AB/v. Кроме того, поскольку время treaction реакции на передачу оборудования пользователя в пределах удаления границы должно удовлетворять следующему условию  , тогда
, тогда  , то есть,
, то есть,  . Как можно видеть из этого, магнитуда удаления границы положительно взаимосвязана со скоростью движения оборудования пользователя и, по меньшей мере, больше чем или равна
. Как можно видеть из этого, магнитуда удаления границы положительно взаимосвязана со скоростью движения оборудования пользователя и, по меньшей мере, больше чем или равна  . Для специалиста в данной области техники должно быть понятно, что минимальное время реакции на передачу оборудования пользователя может быть определено экспериментально.
. Для специалиста в данной области техники должно быть понятно, что минимальное время реакции на передачу оборудования пользователя может быть определено экспериментально.
В одном примере изобретения удаление границы, соответствующее малой соте, представляет собой круг с центром в точке доступа малой соты. Однако в фактических вариантах осуществления удаление границы может не представлять собой идеальный круг, из-за влияния различных коэффициентов. Кроме того, для специалиста в данной области техники должно быть понятно, что использование круга для аппроксимации удаления границы, соответствующей малой соте, предназначено только для упрощения моделирования, и другие формы также можно использовать для аппроксимации удаления границы, соответствующей малой соте.
После определения удаления границы, соответствующей малой соте, можно определить, приближается ли оборудование пользователя к малой соте, путем сравнения расстояния между оборудованием пользователя и малой сотой (точка доступа малой соты) в пределах границы. Например, если расстояние между оборудованием пользователя и малой сотой меньше чем или равно удалению границы, оборудование пользователя расположено в пределах удаления границы, что означает, что оборудование пользователя приближается к малой соте. Кроме того, если расстояние между оборудованием пользователя и малой сотой больше, чем удаление границы, оборудование пользователя расположено за пределами удаления границы, что означает, что оборудование пользователя находится далеко от малой соты и не приближается к малой соте.
Кроме того, в соответствии с вариантом осуществления изобретения модуль 104 оценки состояния мобильности дополнительно выполнен с возможностью классификации малых сот, расположенных рядом друг с другом, в один кластер, и расчета определенного удаления границы, в соответствии с соответствующими малыми сотами в одном кластере, в качестве удаления границы, соответствующего одному кластеру.
Что касается области, где распределение малых сот является плотным, поскольку расстояние между малыми сотами мало, может потребоваться определить, приближается ли оборудование пользователя к каждой малой соте последовательно, в результате чего, ухудшается эффективность обработки системы. Поэтому, для области с плотным распределением малых сот, модуль 104 состояния мобильности может классифицировать малые соты, расположенные рядом друг с другом, в один кластер. Для каждой малой соты в пределах кластера удаление границы, соответствующее каждой из малых сот, определяют, соответственно. Затем объединение определенных значений удаления границы рассчитывают как удаление границы, соответствующее этому кластеру. В этом случае полученное удаление границы, соответствующее одному кластеру, больше не является кругом. В результате классификации малых сот, расположенных рядом друг с другом, в один кластер, нет необходимости определять, приближается ли оборудование пользователя к каждой малой соте последовательно, но можно непосредственно определять, приближается ли оборудование пользователя к этому кластеру, уменьшая, таким образом, количество определений и улучшая эффективность обработки системы.
Кроме того, модуль 104 оценки состояния мобильности может дополнительно определять зону охвата малой соты в соответствии с качеством сигнала малой соты. В этом изобретении зона охвата малой соты, в общем, относится к области, где оборудование пользователя может нормально принимать сигнал малой соты и получать нормальное качество обслуживания. Например, модуль 104 оценки состояния мобильности может определять зону охвата малой соты в соответствии с силой принимаемого сигнала и/или отношением уровня несущей взаимной помехи плюс шумы в малой соте. В частности, значение качества сигнала может быть определено, как пороговое значение зоны охвата малой соты, которое может представлять собой значение качества сигнала малой соты, когда оборудование пользователя инициирует отчет об измерениях при передаче оборудования пользователя. Затем зона охвата малой соты может быть определена путем получения состояния распределения качества сигнала вокруг малой соты и сравнения его с пороговым значением зоны охвата малой соты. Распределение качества сигнала малой соты может быть измерено с опережением по времени фактического расположения, и также может быть получено из отчета об измерениях оборудования пользователя. Кроме того, зона охвата малой соты также связана с мощностью передачи малой соты, и в соответствии с формулой затухания в больших масштабах может быть приблизительно выведена соответствующая вариация зоны охвата малой соты при изменениях мощности передачи малой соты.
В общем, зона охвата малой соты также представляет собой круг с центром в точке доступа малой соты. Кроме того, как показано на фиг. 3, зона охвата малой соты представляет собой круг, концентричный с описанным выше удалением границы, и радиус зоны охвата меньше, чем радиус удаления границы. Однако, в фактической окружающей среде, из-за влияния различных факторов, зона охвата малой соты может не представлять собой идеальный круг, и магнитуда радиуса зоны охвата малой соты может отличаться от опорного значения заданного в стандарте. Кроме того, для специалиста в данной области техники должно быть понятно, что использование круга для аппроксимации зоны охвата малой соты используется только с целью упрощения моделирования, и другие формы, конечно, также могут использоваться для аппроксимации зоны охвата малой соты.
В соответствии с вариантом осуществления изобретения, модуль 104 оценки состояния мобильности дополнительно выполнен с возможностью классификации скорости движения оборудования пользователя по разным уровням скорости, и исполнительный модуль 106 дополнительно выполнен с возможностью классификации положения, в котором расположено оборудование пользователя, по разным областям, используя критерии разделения области, соответствующие уровням скорости оборудования пользователя.
Как показано на фиг. 3, поскольку положение базовой станции является фиксированным, область охвата базовой станции может быть определена. Для улучшения точности определения положения оборудования пользователя и уменьшения нагрузки базовой станции, соединенной в настоящее время с оборудованием пользователя, положение, в котором находиться оборудование пользователя, может быть классифицировано в разные области, используя критерии разделения области, в соответствии с уровнями скорости оборудования пользователя. Например, модуль 104 оценки состояния мобильности может разделять скорость движения оборудования пользователя на три уровня, такие как уровень высокой скорости, уровень средней скорости и уровень низкой скорости, и исполнительный модуль 106 может классифицировать положение, в котором расположено оборудование пользователя по разным областям, используя критерии разделения области, соответствующие уровню высокой скорости, уровню средней скорости и уровню низкой скорости, соответственно. В частности, если скорость движения оборудования пользователя представляет собой уровень высокой скорости, область охвата базовой станции может быть разделена на внешнюю область a1, среднюю область b1 и внутреннюю область c1, в соответствии с расстоянием от малой соты в порядке убывания, то есть, критерий разделения области, соответствующие уровню высокой скорости оборудования пользователя, представляет собой внешнюю область a1, среднюю область b1 и внутреннюю область c1. Если скорость движения оборудования пользователя представляет собой средний уровень скорости, область охвата базовой станции может быть разделена на внешнюю область а2, среднюю область b2 и внутреннюю область с2, в соответствии с расстоянием от малой соты в порядке убывания, то есть, критерии разделения области, соответствующие среднему уровню скорости оборудования пользователя, представляют собой внешнюю область а2, среднюю область b2 и внутреннюю область с2. Если скорость движения оборудования пользователя представляет собой низкий уровень скорости, область охвата базовой станции может быть разделена на внешнюю область а3, средняя область b3 и внутреннюю область с3, в соответствии с расстоянием от малой соты, в порядке убывания, то есть, критерии разделения области, соответствующие низкому уровню скорости оборудования пользователя, представляют собой внешнюю область а2, среднюю область b3 и внутреннюю область с3. В частности, внешние области a1, а2 и а3 расположены за пределами удаления границы, соответствующие малой соте (внешнее удаление, как показано на фиг. 3), средние области b1, b2 и b3 расположены между удалением границы, соответствующим малой соте и зоне охвата малой соты, и внутренние области c1, с2 и с3 окружены зоной охвата малой соты.
Как описано выше, в случае, когда определяют качество сигнала малой соты, можно определить, что зона охвата малой соты является одинаковой, то есть, для оборудования пользователя со скоростью движения на разных уровнях, таких как высокий уровень скорости, средний уровень скорости и низкий уровень скорости, радиусы разделенных внутренних областей c1, с2 и с3 могут быть одинаковыми. Кроме того, как описано выше, поскольку удаление границы, соответствующее оборудованию пользователя со скоростью движения с высоким уровнем скорости, больше, удаление границы, соответствующее оборудованию пользователя со скоростью движения с низким уровнем скорости, будет меньше, и удаление границы, соответствующее оборудованию пользователя со скоростью движения на уровне средней скорости, находится между большим удалением границы и меньшим удалением границы для разных уровней высокого уровня скорости, среднего уровня скорости и низкого уровня скорости для скорости движения оборудования пользователя, радиусы разделенных средних областей b1, b2 и b3 могут иметь следующую взаимосвязь: b1>b2>b3 и, соответственно, радиусы разделенных внешних областей a1, а2 и а3 могут иметь следующую взаимосвязь: a1<а2<а3.
Как описано выше, модуль 104 оценки состояния мобильности может оценивать состояние мобильности оборудования пользователя и может рассчитывать скорость движения и/или направление движения оборудования пользователя, в соответствии с множеством информации о положении оборудования пользователя в разные моменты времени. После расчета скорости движения оборудования пользователя может быть определено, на каком уровне среди описанных выше разных уровней скорости находится рассчитанная скорость движения оборудования пользователя, определяя, таким образом, используя критерии разделения области, соответствие уровню скорости оборудования пользователя. Например, может быть определено, в какой из высокого уровня скорости, среднего уровня скорости и низкого уровня скорости попадает скорость движения оборудования пользователя, определяя, таким образом, следует ли применять критерии разделения области "внешняя область a1, средняя область b1 и внутренняя область c1" в соответствии с высоким уровнем скорости оборудования пользователя, чтобы принять критерии разделения области "внешняя область а2, средняя область b2 и внутренняя область с2" в соответствии со средним уровнем скорости оборудования пользователя, или принять критерии разделения области "внешняя область а3, средняя область b3 и внутренняя область с3", соответствующие низкому уровню скорости оборудования пользователя. Поэтому, если состояние мобильности оборудования пользователя меняется, например, если скорость движения оборудования пользователя меняется на другой уровень скорости, требуется только соответствующим образом модифицировать критерии разделения области, в соответствии с этим.
После определения критериев разделения области в соответствии с уровнем скорости оборудования пользователя, в соответствии со скоростью движения оборудования пользователя, положение, в котором находится оборудование пользователя, может быть классифицировано, используя критерии разделения области, в соответствии с уровнем скорости оборудования пользователя, на различные области в соответствии с расстоянием между оборудованием пользователя и точкой доступа малой соты, и разные стратегии обновления положения могут быть установлены для разных областей.
Например, если скорость движения оборудования пользователя попадает на высокий уровень скорости, тогда может быть определено, что критерии разделения области, соответствующие высокому уровню скорости оборудования пользователя, представляют собой внешнюю область a1, среднюю область b1 и внутреннюю область c1. Поэтому, расстояние D между оборудованием пользователя и малой сотой можно сравнивать с радиусом Rb1 упомянутой выше средней области b1 и радиусом Rc1 упомянутой выше внутренней области, и положение, в котором находится оборудование пользователя, может быть классифицировано на разные области, в соответствии с результатом сравнения. В частности, если D≤Rc1, тогда положение, в котором находится оборудование пользователя, может быть классифицировано на внутреннюю область; если Rc1<D≤Rb1, тогда положение, в котором находится оборудование пользователя, может быть классифицировано на среднюю область; и если Ra1≥D>Rb1, положение, в котором находится оборудование пользователя, может быть классифицировано на внешнюю область (внешняя область, показанная на фиг. 3). Кроме того, подход к обработке, когда скорость движения оборудования пользователя попадает на средний уровень скорости или на низкий уровень скорости, аналогичен подходу к обработке, когда скорость движения оборудования пользователя попадает на высокий уровень скорости, и его детали не будут здесь повторяться.
Когда оборудование пользователя расположено во внешней области, например, оборудование пользователя в моменты времени t1, t2, t3 и t4, как показано на фиг. 3, поскольку оборудование пользователя находится далеко от малой соты, базовой станции требуется только обновлять информацию о положении оборудования пользователя каждый период времени и рассчитывать скорость движения оборудования пользователя в соответствии с множеством информации о положении оборудования пользователя. Когда оборудование пользователя расположено в средней области, например, оборудование пользователя в момент времени t5, как показано на фиг. 3, оборудование пользователя расположено в пределах удаления границы в это время, но не попадает в зону охвата малой соты, что означает, что оборудование пользователя находилось близко к малой соте в это время и, возможно, продолжает движение во внутреннюю область (то есть, в зону охвата малой соты). Поэтому, базовой станции требуется более точно получить изменения в состоянии мобильности и информацию о положении оборудования пользователя для определения, попадет ли оборудование пользователя в зону охвата малой соты, таким образом, что, когда определяют, что оборудование пользователя находится очень близко к внутренней области (то есть, зоне охвата малой соты), рассматривают возможность инициирования процедуры измерения соседней соты на разных частотах для оборудования пользователя. Когда оборудование пользователя расположено во внутренней области, например, оборудование пользователя в момент времени t6, как показано на фиг. 3, процедура измерения соседней соты на разных частотах для оборудования пользователя, возможно, была инициирована, и, таким образом, базовая станция инициирует процедуру передачи для соты на разных частотах и/или процедуру загрузки несущей оборудования пользователя в соответствующие моменты времени, в соответствии с отчетом об измерениях оборудования пользователя и состоянием мобильности оборудования пользователя.
В соответствии с вариантом осуществления изобретения, множество информации о положении оборудования пользователя в разное время получают в заданном цикле получения, и исполнительный модуль 106 дополнительно выполнен с возможностью установления более длительного цикла получения, если оборудование пользователя расположено за пределами удаления границы, и установления более короткого цикла получения, если оборудование пользователя расположено в пределах удаления границы.
Базовая станция может получать информацию о множестве положений оборудования пользователя в заданном цикле получения, например, базовая станция может получать информацию о положении оборудования пользователя один раз каждые 500 мс. Кроме того, длительность описанного выше цикла получения можно регулировать, например, длительность описанного выше цикла получения можно регулировать в соответствии с фактическим положением, в котором расположено оборудование пользователя. В частности, как показано на фиг. 3, когда оборудование пользователя расположено за пределами удаления границы, то есть, когда оборудование пользователя расположено во внешней области, поскольку оборудование пользователя расположено далеко от малой соты, базовой станции требуется только получить приблизительную информацию о положении оборудования пользователя, и цикл получения может быть установлен более длительным. Кроме того, как показано на фиг. 3, когда оборудование пользователя расположено в пределах удаления границы, поскольку оборудование пользователя, возможно, может продолжить движение в зону охвата малой соты, базовой станции требуется более точно выполнять изменения о состоянии мобильности и информацию о положении оборудования пользователя для определения, была ли обнаружена малая сота, и цикл получения может быть установлен более коротким. Кроме того, длительность упомянутого выше цикла получения можно регулировать в соответствии со скоростью движения оборудования пользователя. Например, чем больше скорость движения оборудования пользователя, тем быстрее меняется информация о положении оборудования пользователя, и, таким образом, цикл получения может быть установлены более коротким; и чем меньше скорость движения оборудования пользователя, тем медленнее изменяется информация о положении оборудования пользователя, и, таким образом, цикл получения может быть установлен более длительным. Для специалиста в данной области техники должно быть понятно, что длительность цикла получения также может регулироваться в соответствии с другими коэффициентами.
В соответствии с вариантом осуществления изобретения, исполнительный модуль 106, кроме того, выполнен с возможностью определять, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты, если оборудование пользователя расположено в пределах удаления границы, и упомянутое выше исходное условие представляет собой одно или больше из следующих: оборудование пользователя не находится в состоянии высокой скорости мобильности, и малая сота находится в хорошем состоянии нагрузки, и имеет остаточные ресурсы для доступа оборудования пользователя.
Как показано на фиг. 3, когда оборудование пользователя расположено за пределами удаления границы, то есть, когда оборудование пользователя расположено в пределах внешней области, поскольку оборудование пользователя находится далеко от малой соты, нет необходимости определять, удовлетворяет ли оборудование пользователя в это время исходному условию детектирования малой соты. Однако, когда оборудование пользователя расположено в пределах удаления границы, поскольку оборудование пользователя, возможно, может продолжать движение в пределы зоны охвата малой соты, определяют, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты, только если оборудование пользователя расположено в пределах удаления границы. Таким образом, может быть определено, когда начинать процедуру детектирования малой соты в соответствии с фактическим положением, в котором находится оборудование пользователя, и, таким образом, становится возможным сохранить ресурсы и улучшить эффективность детектирования малой соты.
В соответствии с фактическими условиями, исходное условие детектирования малой соты может представлять собой один или больше из представленных выше пунктов. В гетерогенной сети малые соты, в основном, расположены в густонаселенных областях, например, в супермаркетах, торговых центрах, офисах и т.п., и основное их назначение состоит в том, чтобы распределять услуги базовой станции. Поэтому, если оборудование пользователя, движущееся с высокой скоростью, появится в упомянутых выше густонаселенных областях, то обычно оно не остается в них, но проходит через них. Поэтому, если оборудование пользователя находится в состоянии мобильности с высокой скоростью, не следует выполнять детектирование малой соты для оборудования пользователя и переключение оборудования пользователя на малую соту. То есть, процедура детектирования малой соты может быть выполнена в случае, когда оборудование пользователя не находится в состоянии мобильности с высокой скоростью. Кроме того, рассматривая проблему баланса нагрузки, процедура детектирования малой соты может быть выполнена в случае, когда малая сота находится в состоянии хорошей нагрузки и остаточных ресурсов для доступа оборудования пользователя. Для специалиста в данной области техники должно быть понятно, что представленное выше исходное условие представляет собой только пример, но не ограничение.
Процедура оценки состояния мобильности оборудования пользователя описана со ссылкой на фиг. 4, представленную ниже. На фиг. 4 показана схема, иллюстрирующая оценку состояния мобильности оборудования пользователя, в соответствии с вариантом осуществления изобретения.
В соответствии с вариантом осуществления изобретения, модуль 104 оценки состояния мобильности дополнительно выполнен с возможностью расчета, в соответствии с информацией о положении, скорости движения и направлении движения оборудования пользователя, времени пребывания tstay, требуемого для прохода оборудования пользователя через малую соту, и сравнения расчетного время tstay пребывания с заданным пороговым значением Tstay времени пребывания для оценки, что оборудование пользователя не находится в состоянии мобильности с высокой скоростью.
Как показано на фиг. 4, текущее положение оборудования пользователя представляет собой (ха, уа), направление движения оборудования пользователя (то есть, угол пересечения стрелки, обозначающей направление перемещения оборудования пользователя относительно горизонтальной линии, как показано на фиг. 4), составляет α, и скорость движения оборудования пользователя в положении А (ха, уа) равна v. Кроме того, положение размещения малой соты (то есть, положение размещения точки доступа малой соты) представляет собой О (хо, уо), и радиус зоны охвата малой соты составляет Rc.
В соответствии с текущим положением (xa, уа) оборудования пользователя и направлением движения α оборудования пользователя, место положения оборудования пользователя при движении может быть спрогнозировано, как у=tan α⋅(х-ха)+уа.
Представленное выше положение при движении у=tan α⋅(х-ха)+уа может быть представлено в форме прямой линии tan α⋅х+(-1⋅у)+(-tan α⋅ха+уа)=0, и, таким образом, коэффициенты Е, F и G прямой линии представляют собой: Е=tan α, F=-1, G=-tan α⋅xa+ya. Расстояние от положения размещения О (xо, уo) малой соты относительно упомянутой выше прямой линии у может быть рассчитано в соответствии с расчетной формулой расстояния от точки до линии следующим образом:  , при подстановке коэффициентов Е=tan α и F=-1 в представленную выше формулу, можно получить
, при подстановке коэффициентов Е=tan α и F=-1 в представленную выше формулу, можно получить  . Затем, как можно видеть из теоремы Пифагора,
. Затем, как можно видеть из теоремы Пифагора, 
 , при подстановке OB=Rb и
, при подстановке OB=Rb и  в представленную выше формулу, может быть получено
в представленную выше формулу, может быть получено  . Поэтому, в соответствии с расстоянием BD пребывания оборудования пользователя в пределах малой соты и скоростью v оборудования пользователя, время пребывания, требуемое для прохождения оборудования пользователя через малую соту, может быть рассчитано, как:
. Поэтому, в соответствии с расстоянием BD пребывания оборудования пользователя в пределах малой соты и скоростью v оборудования пользователя, время пребывания, требуемое для прохождения оборудования пользователя через малую соту, может быть рассчитано, как:  .
.
После расчета времени пребывания tstay, рассчитанное время tstay пребывания можно сравнивать с заданным пороговым значением Tstay времени пребывания для оценки, находится ли оборудование пользователя в состоянии мобильности с высокой скоростью. Например, если tstay<Tstay, можно считать, что оборудование пользователя находится в состоянии мобильности с высокой скоростью, и, таким образом, если оборудование пользователя переключается на малую соту, это ухудшит восприятие пользователем, обладающим оборудованием пользователя. Кроме того, если tstay≥Tstay, можно считать, что оборудование пользователя не находится в состоянии мобильности с высокой скоростью, и, таким образом, может быть инициирована процедура детектирования малой соты оборудования пользователя. Для специалиста в данной области техники должно быть понятно, что заранее определенное пороговое значение Tstay времени нахождения может быть определено экспериментально.
Другая конфигурация устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения будет описана со ссылкой на фиг. 5, представленную ниже. На фиг. 5 показана блок-схема, иллюстрирующая другую конфигурацию устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 5, устройство 500 в системе беспроводной передачи данных включает в себя модуль 502 получения информации о положении, модуль 504 оценки состояния мобильности, исполнительный модуль 506 и модуль 508 определения измерения соседней соты на разных частотах. Конфигурации модуля 502 получения информации о положении, модуля 504 оценки состояния мобильности и исполнительного модуля 506 являются такими же, как и у модуля 102 получения информации о положении, модуля 104 оценки состояния мобильности и исполнительного модуля 106 в устройстве 100, как показано на фиг. 1, соответственно, и, таким образом, какие-либо конкретные детали их не будут повторяться. Ниже будет подробно описан модуль 508 определения измерения соседней соты на разных частотах в устройстве 500.
Как показано на фиг. 5, модуль 508 определения измерения соседней соты на разных частотах может определять, следует ли инициировать измерение соседней соты на разных частотах в оборудовании пользователя.
Например, если оборудование пользователя удовлетворяет исходному условию детектирования малой соты, это означает, что оборудование пользователя расположено близко к зоне охвата малой соты и вскоре прибывает в зону охвата малой соты. В это время необходимо инициировать измерение качества сигнала соседней соты оборудованием пользователя в соответствующий момент времени, и передать отчет об измеренном качестве сигнала соседней соты в базовую станцию. Как описано выше, исходное условие детектирования малой соты представляет собой один или больше из следующих пунктов: оборудование пользователя не находится в состоянии мобильности с высокой скоростью, и малая сота находится в состоянии хорошей нагрузки и имеет остаточные ресурсы для доступа к оборудованию пользователя. Кроме того, что касается конфигурации измерения соты, можно обратиться к секции 10.1.3 в 3GPP TS 36.300 и секции 5.5.4 в 3GPPTS 36.331.
Если обслуживающая сота, в которой расположено оборудование пользователя, и соседняя сота, находится в одной той же полосе частот, то есть, в случае измерения на одной частоте, при выполнении представленных выше измерений не возникают особые проблемы. Однако, для случая работы на разных частотах, то есть, в случае измерения на разных частотах, представленное выше измерение не является соответствующим. Для случая работы на разных частотах, поскольку оборудование пользователя имеет только один приемопередатчик, только информация об одной полосе частот может быть принята одновременно. Поэтому, для реализации измерения соты на разных частотах, должна быть введена концепция "зазора измерений".
В секции 8.1.2.1 3GPP TS 36.311, зазор измерений определен следующим образом: в пределах зазора измерений оборудование пользователя не передает какие-либо данные и не настраивает приемник оборудования пользователя на полосу частот обслуживающей соты в e-UTRAN. В подфрейме восходящего канала передачи немедленно после зазора измерения, оборудование пользователя, использующее дуплексирование с разделением частот (FDD) в e-UTRAN, не будет передавать какие-либо данные, и если подфрейм перед зазором измерений представляет собой подфрейм нисходящего канала передачи, оборудование пользователя, использующее дуплексирование с разделением по времени (TDD) в e-UTRAN, не будет передавать какие-либо данные.
При конфигурировании зазора измерений, MeasGapConfig IE может быть сконфигурирован, используя сообщение RRC_Connection_Reconfiguration, и базовая станция уведомляет оборудование пользователя о параметрах, относящихся к зазору измерений, например, начальной точке зазора измерений, длительности зазора измерений, количеству зазоров измерений и т.п. Кроме того, два режима зазора измерений, которые могут поддерживаться оборудованием пользователя, также представлены в 3GPP TS 36.133, и детали можно найти в 3GPP TS 36.133, и, таким образом, здесь не будут повторяться какие-либо детали. Поэтому, описанная выше проблема, состоящая в том, чтобы инициировать измерение для качества сигнала соседней соты оборудованием пользователя в соответствующие моменты времени, фактически представляет собой проблему, состоящую в том, когда конфигурировать зазор измерения.
В соответствии с вариантом осуществления изобретения, модуль 504 оценки состояния мобильности дополнительно выполнен с возможностью расчета времени реакции для прибытия оборудования пользователя в зону охвата малой соты, в соответствии с информацией о положении, скоростью движения и направлением движения оборудования пользователя, и модуль 508 определения измерения соседней соты на разных частотах дополнительно выполнен с возможностью сравнивать расчетное время реакции с заданным пороговым значением времени реакции для определения, следует ли инициировать измерение соседней соты на разных частотах для оборудования пользователя.
При увеличении скорости движения оборудования пользователя время реакции, оставшееся для оборудования пользователя для выполнения соответствующих операций, постоянно уменьшается, что представляет собой одну из наиболее важных причин, по которой увеличивается количество неудачных передач оборудования пользователя (HOF) при увеличении скорости. Для обеспечения возможности инициирования измерений соседней соты на разных частотах для оборудования пользователя с течением времени, достаточное время реакции должно быть зарезервировано для оборудования пользователя. В этом варианте осуществления время treaction реакции оборудования пользователя обозначает время, в которое оборудование пользователя поступает в зону охвата малой соты из текущего положения, в соответствии с текущим состоянием мобильности (например, текущей скоростью движения и направлением движения оборудования пользователя).
Как рассчитать время реакции для прибытия оборудования пользователя в зону охвата малой соты, было описано со ссылкой на фиг. 4, представленную выше. Как показано на фиг. 4, текущее положение оборудования пользователя составляет (ха, уа), направление движения оборудования пользователя (то есть, угол пересечения стрелки, обозначающей направление перемещения оборудования пользователя относительно горизонтальной линии, как показано на фиг. 4), составляет α, и скорость движения оборудования пользователя в положении А (ха, уа) равна v. Кроме того, положение размещения малой соты (то есть, положение размещения точки доступа малой соты) представляет собой О (хо, уo), и радиус зоне охвата малой соты составляет Rb. Как показано на фиг. 4, время treaction реакции оборудования пользователя равно времени, когда оборудование пользователя прибывает в зону охвата (то есть, в точку В на фиг. 4) малой соты из текущего положения (ха, уа) с текущей скоростью движения v и направлением а движения.
Как показано на фиг. 4, АВ=АС-ВС. Кроме того, как можно видеть из теоремы Пифагора,  , и как можно видеть из представленного выше описания,
, и как можно видеть из представленного выше описания, 
 , и, таким образом,
, и, таким образом,  . Кроме того, как можно видеть из теоремы Пифагора,
. Кроме того, как можно видеть из теоремы Пифагора,  , где
, где  и
и  , и, таким образом,
, и, таким образом,  . При подстановке расчетных значений АС и ВС в представленную выше формулу АВ=АС-ВС, можно получить:
. При подстановке расчетных значений АС и ВС в представленную выше формулу АВ=АС-ВС, можно получить: 
 . Скорость движения оборудования пользователя в положении А (ха, уа) равна v, и, таким образом, treaction=AB/v.
. Скорость движения оборудования пользователя в положении А (ха, уа) равна v, и, таким образом, treaction=AB/v.
После расчета времени treaction реакции оборудования пользователя, расчетное время реакции treaction можно сравнивать с заданным пороговым значением времени Treaction реакции для определения, следует ли инициировать измерение соседней соты на разных частотах для оборудования пользователя. Например, если treaction<Treaction, можно считать, что оборудование пользователя расположено близко к малой соте, и следует начать инициирование измерение соты на разных частотах оборудованием пользователя. Для специалиста в данной области техники должно быть понятно, что заданное пороговое значение Treaction времени реакции может быть определено, используя эксперименты.
Однако, поскольку вариация в фактических беспроводных каналах передачи является очень сложной, зона охвата малой соты не представляет собой правильный круг. Поэтому, после конфигурирования зазора измерений, могут возникать следующие случаи: а) малая сота была детектирована очень быстро (например, перед определением положения оборудования пользователя в следующий раз) и передача оборудования пользователя в малую соту была выполнена успешно; b) малая сота была детектирована очень быстро, но не была выполнена передача оборудования пользователя в малую соту; с) малая сота была детектирована очень быстро, но произошла неудачная передача оборудования пользователя в малую соту; d) малая сота была детектирована через определенный период времени (например, после установления положения оборудования пользователя в следующий раз); или е) малая сота не была детектирована после истечения очень длительного времени.
Следует отметить, что поскольку передача оборудования пользователя сотой на разных частотах всегда инициируется на основе событий, например, события A3 и т.п., условие входа в событие A3 состоит в том, что качество сигнала (например, значение RSRP, основанное на значении на основе RSRQ) соседней соты выше, чем смещенная величина относительно обслуживающей соты. После инициирования события A3 оборудование пользователя может быть выполнено с возможностью периодической передачи отчета об измерениях. Поэтому, если был детектирован отчет об измерениях, относящийся к малой соте оборудования пользователя, можно считать, что малая сота детектируется в настоящее время.
Кроме того, время tdetect детектирования может использоваться для обозначения времени от момента инициирования измерения соты на разных частотах для удовлетворения условия инициирования события A3. Время tdetect детектирования можно сравнивать с заданным минимальным пороговым значением времени детектирования  и заданным максимальным пороговым значением времени детектирования
и заданным максимальным пороговым значением времени детектирования  , если
, если  , считается, что малая сота была детектирована очень быстро в настоящее время, и если
, считается, что малая сота была детектирована очень быстро в настоящее время, и если  , считается, что малая сота не была детектирована в течение очень длительного времени. Для специалиста в данной области техники должно быть понятно, что заданное минимальное пороговое значение
, считается, что малая сота не была детектирована в течение очень длительного времени. Для специалиста в данной области техники должно быть понятно, что заданное минимальное пороговое значение  времени детектирования и заданное максимальное пороговое значение
времени детектирования и заданное максимальное пороговое значение  времени детектирования могут быть определены экспериментально. Кроме того, зазор измерений может быть отключен, используя сообщение RRC_Connection_Reconfiguration.
времени детектирования могут быть определены экспериментально. Кроме того, зазор измерений может быть отключен, используя сообщение RRC_Connection_Reconfiguration.
Далее, соответственно, будут проанализированы различные случаи. Для случая а) это означает, что наиболее соответствующим является инициировать измерение соседней соты на разных частотах в этот момент времени, оборудование пользователя уменьшает количество ненужных измерений соседней соты на разных частотах в максимально возможной степени, и передача оборудования пользователя в соседнюю соту на разных частотах была выполнена успешно. Для случая b) это означает, что в это время целесообразно инициировать измерение соседней соты на разных частотах, но оборудование пользователя изменило свое состояние мобильности, например, оборудование пользователя изменило свое направление движения, и, таким образом, передача оборудования пользователя больше не требуется. Для случая с) это означает, что измерение соседней соты на разных частотах было инициировано поздно, в результате чего, недостаточно времени реакции, и, таким образом, происходит неудачная передача оборудования пользователя. Для случая d) это означает, что инициирование измерения соседней соты на разных частотах было инициировано рано, в результате чего, было выполнено чрезмерное количество измерений соседней соты на разных частотах. Для случая е) это означает, что малая сота не была детектирована, и, таким образом, детектирование соседней соты на разных частотах было выполнено неудачно.
Далее, в соответствии с вариантом осуществления изобретения, когда определяют, следует ли инициировать измерение соседней соты на разных частотах оборудованием пользователя, принимают информацию о положении, полученную системой Глобальной спутниковой навигации, передаваемой в отчете оборудования пользователя, и скорость движения, и/или направление движения и т.п. оборудования пользователя рассчитывают в соответствии с переданной в отчете информацией о положении из системы Глобальной спутниковой навигации.
Поскольку информация о положении из системы Глобальной спутниковой навигации является наиболее точной, когда для базовой требуется более точная информация о положении, например, когда выполняют инициирование измерения соседней соты на разных частотах оборудования пользователя, можно передавать запрос в оборудование пользователя передать отчет с информацией о положении, полученной системой Глобальной спутниковой навигации в базовую станцию. В соответствии с передаваемой в отчете информацией о положении, полученной системой Глобальной спутниковой навигации, базовая станция может рассчитать скорость движения и/или направление движения, и т.п. оборудования пользователя.
В соответствии с вариантом осуществления изобретения, модуль 504 оценки состояния мобильности дополнительно выполнен с возможностью разделения удаления границы на множество подобластей, причем каждая подобласть, соответствует заданной вероятности инициирования, и дополнительно выполнен с возможностью определения подобласти, где расположено оборудование пользователя, и соответствующей вероятности инициирования, в соответствии с информацией о положении оборудования пользователя; и модуль 508 определения измерения соседней соты на разных частотах дополнительно выполнен с возможностью инициирования измерения соседней соты на разных частотах оборудования пользователя, в соответствии с определенной вероятностью инициирования соответствующей подобласти, где расположено оборудование пользователя.
Как описано выше, в фактических сценах, зона охвата малой соты является очень неоднородной, для аппроксимации зоны охвата малой соты с точки зрения упрощения моделирования используется круг, что, таким образом, способствует оценке состояния мобильности. Однако при инициировании измерения соседней соты на разных частотах необходимо учитывать фактическую зону охвата малой соты. Например, область до границы может быть разделена на множество подобластей, в соответствии с углом и/или расстоянием в отношении малой соты, причем каждая подобласть соответствует заданной вероятности инициирования. Для оборудования пользователя, которое удовлетворяет инициированию измерения соседней соты на разных частотах, базовая станция определяет подобласть, где расположено оборудование пользователя, и ее соответствующую вероятность инициирования, в соответствии с информацией о положении оборудования пользователя, и инициирует измерение соседней соты на разных частотах оборудования пользователя, в соответствии с определенной вероятностью инициирования, которая соответствует подобласти, где расположено оборудование пользователя. Следует отметить, что вероятность инициирования может быть связана с такими факторами, как использует ли оборудование пользователя помощь со стороны системы Глобальной спутниковой навигации, прошлую успешную частоту детектирования малой соты и т.п.
Другая конфигурация устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения, будет описана со ссылкой на фиг. 6, представленную ниже. На фиг. 6 показана блок-схема, иллюстрирующая другую конфигурацию устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 6, устройство 600 в системе беспроводной передачи данных включает в себя модуль 602 получения информации о положении, модуль 604 оценки состояния мобильности, исполнительный модуль 606, модуль 608 определения измерения соседней соты на разных частотах и модуль 610 определения доступа к соседней соте на разных частотах. Конфигурации модуля 602 получения информации о положении, модуля 604 оценки состояния мобильности, исполнительного модуля 606 и модуля 608 определения измерения соседней соты на разных частотах являются такими же, как и у модуля 502 получения информации о положении, модуля 504 оценки состояния мобильности, исполнительного модуля 506 и модуля 508 определения измерения соседней соты на разных частотах в устройстве 500, как показано на фиг. 5, соответственно, и, таким образом, их конкретные детали здесь не будут повторяться. Ниже будет подробно описан модуль 610 определения доступа к соседней соте на разных частотах в устройстве 600.
Как показано на фиг. 6, модуль 610 определения доступа к соседней соте на разных частотах может определять, в соответствии с отчетом об измерениях оборудования пользователя и на основе информации о положении оборудования пользователя, следует ли инициировать передачу оборудования пользователя в соте на разных частотах и/или выполнять загрузку несущей оборудования, в случае, когда было инициировано измерение соседней соты на разных частотах оборудования пользователя.
Как описано выше, передача оборудования пользователя в соте на разных частотах всегда инициируется на основе событий, например, событие A3 и т.п. Условие входа события A3 представляет собой то, что качество сигнала (например, значение RSRP на основе значения RSRQ) соседней соты выше, чем значение смещения относительно обслуживающей соты. После инициирования события A3 оборудование пользователя может быть выполнено с возможностью периодического отчета об измерениях. Поэтому, в случае, когда оборудование пользователя инициировало измерение соседней соты на разных частотах, базовая станция может инициировать передачу абонента соседней соты на разных частотах или процедуру загрузки несущей в соответствующие моменты времени, в соответствии с отчетом об измерениях оборудования пользователя и информацией о положении оборудования пользователя.
Способ для использования в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения, будет описан со ссылкой на фиг. 7, представленную ниже. На фиг. 7 показана блок-схема последовательности операций, представляющая способ для использования в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 7, способ начинается с этапа 700. После этапа 700, способ переходит на этап 702.
Этап 702 представляет собой этап получения информации о положении. На этапе 702 получают информацию о положении оборудования пользователя.
После этапа 702, способ переходит на этап 704.
Этап 704 представляет собой этап оценки состояния мобильности. На этапе 704 состояние мобильности оборудования пользователя оценивают в соответствии с информацией о положении оборудования пользователя в разное время.
После этапа 704, способ переходит на этап 706.
Этап 706 представляет собой исполнительный этап. На этапе 706, соответствующие операции, относящиеся к детектированию малой соты, выполняют в соответствии с изменениями в состоянии мобильности и информацией о положении оборудования пользователя.
Способ, показанный на фиг. 7 представляет собой способ, соответствующий устройству, описанному на фиг. 1, и его конкретные детали не будут здесь повторяться.
Способ для использования в системе беспроводной передачи данных в соответствии с другим вариантом осуществления изобретения будет описан ниже со ссылкой на фиг. 8. На фиг. 8 представлена блок-схема последовательности операций, поясняющая способ для использования в системе беспроводной передачи данных в соответствии с другой вариант осуществления изобретения.
Как показано на фиг. 8, способ начинается с этапа 800. После этапа 800, способ переходит на этап 802.
Этап 802 представляет собой этап получения информации о положении. На этапе 802 получают информацию о положении оборудования пользователя.
После этапа 802, способ переходит на этап 804.
Этап 804 представляет собой этап оценки состояния мобильности. На этапе 804 выполняют оценку состояния мобильности оборудования пользователя, в соответствии с информацией о положении оборудования пользователя в разное время.
После этапа 804, способ переходит на этап 806.
Этап 806 представляет собой этап выполнения. На этапе 806, соответствующие операции, относящиеся к детектированию малой соты, выполняют в соответствии с изменениями состояния мобильности и информации о положении оборудования пользователя.
После этапа 806, способ переходит на этап 808.
Этап 808 представляет собой этап определения измерения соседней соты на разных частотах. На этапе 808 можно определять, следует ли инициировать измерение соседней соты на разных частотах оборудованием пользователя.
Способ, как показано на фиг. 8, представляет собой способ, соответствующий устройству, описанному со ссылкой на фиг. 5, и его конкретные детали не будут здесь повторяться.
Способ для использования в системе беспроводной передачи данных, в соответствии с другим вариантом осуществления изобретения, будет описан со ссылкой на фиг. 9, представленную ниже. На фиг. 9 показана блок-схема последовательности операций, иллюстрирующая способ для использования в системе беспроводной передачи данных, в соответствии с другим вариантом осуществления изобретения.
Как показано на фиг. 9, способ начинается с этапа 900. После этапа 900, способ переходит к этапу 902.
Этап 902 представляет собой этап получения информации о положении. На этапе 902 получают информацию о положении оборудования пользователя.
После этапа 902, способ переходит на этап 904.
Этап 904 представляет собой этап оценки состояния мобильности. На этапе 904 состояние мобильности оборудования пользователя оценивают в соответствии с информацией о положении оборудования пользователя в разное время.
После этапа 904, способ переходит на этап 906.
Этап 906 представляет собой этап выполнения. На этапе 906, соответствующие операции, относящиеся к детектированию малой соты, выполняют в соответствии с изменениями в состоянии мобильности и информацией о положении оборудования пользователя.
После этапа 906, способ переходит на этап 908.
Этап 908 представляет собой этап определения измерения соседней соты на разных частотах. На этапе 908 можно определять, следует ли инициировать измерение соседней соты на разных частотах оборудования пользователя в случае, когда оборудование пользователя удовлетворяет исходному условию детектирования малой соты.
После этапа 908, способ переходит на этап 910.
Этап 910 представляет собой этап определения доступа к соседней соте на разных частотах. На этапе 910 можно определять, в соответствии с отчетом об измерениях оборудования пользователя и информацией о положении оборудования пользователя, следует ли инициировать передачу оборудования пользователя для соты на разных частотах и/или загрузку несущей оборудования пользователя, в случае, когда было инициировано измерение соседней соты на разных частотах оборудованием пользователя.
Способ, показанный на фиг. 9 представляет собой способ, соответствующий устройству, описанному со ссылкой на фиг. 6, и конкретные его детали не будут здесь повторяться.
Ниже будут описаны конкретные варианты осуществления, выполняющие процедуру детектирования малой соты, в соответствии с положением, в котором появляется оборудование пользователя. Следующие варианты осуществления представляют собой только примеры и не являются ограничением.
Вариант 1 осуществления
В данном варианте осуществления оборудование пользователя первоначально появляется во внешней области, и движется в направлении малой соты с низкой скоростью. Процедура детектирования малой соты, в соответствии с данным вариантом осуществления будет подробно описана ниже.
Оборудование пользователя первоначально появляется во внешней области и оно соединено с базовой станцией. В это время базовая станция конфигурирует принятый по умолчанию цикл получения для оборудования пользователя, и получает информацию о положении оборудования пользователя в принятом по умолчанию цикле получения, таким образом, периодически обновляя информацию положения оборудования пользователя.
После получения двух или больше частей информации о положении оборудования пользователя базовая станция может рассчитывать скорость движения оборудования пользователя в соответствии с полученными двумя или больше частями информации о положении, и может определять удаление границы, соответствующей малой соте, в соответствии с рассчитанной скоростью движения.
После определения удаления границы, соответствующей малой соте, в соответствии с рассчитанной скоростью движения, зона охвата базовой станции может быть разделена на внутреннюю область, среднюю область и внешнюю область, в соответствии с удалением границы и зоной охвата малой соты. Кроме того, цикл получения оборудования пользователя может быть дополнительно обновлен, в соответствии с текущей скоростью движения оборудования пользователя. Например, чем выше скорость движения оборудования пользователя, тем короче цикл получения оборудования пользователя; и чем медленнее скорость движения оборудования пользователя, тем длиннее цикл получения оборудования пользователя. Кроме того, следует отметить, что исходный, принятый по умолчанию цикл получения соответствует более короткому циклу получения. Для случая плотного размещения малых сот несколько малых сот, расположенных рядом друг с другом, классифицируют, как один кластер, удаление границы каждой малой соты в пределах кластера определяют соответственно, и рассчитывают объединение удаления границы каждой из малых сот в пределах кластера, как удаление границы данного кластера, которая в это время больше не является кругом.
Базовая станция периодически обновляет информацию о положении оборудования пользователя в цикле получения и рассчитывает скорость движения оборудования пользователя в соответствии с информацией о положении оборудования пользователя, до тех пор, пока оборудование пользователя не выйдет за пределы зоны охвата базовой станции или не войдет в другие области. Если скорость движения оборудования пользователя изменяется, соответствующая удаление границы малой соты также меняется соответственно.
Оборудование пользователя движется в пределах зоны охвата базовой станции после определения базовой станцией, что оборудование пользователя расположено в пределах удаления границы, соответствующей малой соте, соответствующую процедуру оценки выполняют для определения, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты, исходное условие представляет собой одно или больше из следующих: оборудование пользователя не находится в состоянии мобильности с высокой скоростью, малая сота находится в хорошем состоянии нагрузки и имеет остаточные ресурсы для доступа оборудования пользователя.
Если оборудование пользователя удовлетворяет исходному условию детектирования малой соты, базовая станция может, соответственно, сократить цикл получения оборудования пользователя. Кроме того, способ, выполняемый с помощью системы Глобальной спутниковой навигации, также может использоваться для улучшения точности измерений положения оборудования пользователя. Кроме того, если зона охвата малой соты очень мала, или если разница между точностью измерения положения, полученной используя угол прибытия, и временем прохождения сигнала в прямом и обратном направлениях, и результатом измерения системы Глобальной спутниковой навигации слишком велика, система Глобальной спутниковой навигации может использоваться, как основной способ определения положения.
Если оборудование пользователя продолжает движение в направлении малой соты, базовая станция получает информацию о положении оборудования пользователя в соответствующем цикле получения и рассчитывает скорость движения и направление движения оборудования пользователя, в соответствии с измеренной множественной информацией о положении оборудования пользователя. Затем, в соответствии с представленным выше результатом, рассчитывают время treaction реакции в отношении того, что оборудование пользователя попадает в зону охвата малой соты из текущего положения с текущей скоростью движения и направлением движения, если расчетное время treaction реакции меньше, чем заданное пороговое значение времени Treaction реакции, тогда процедура детектирования соседней соты на разных частотах оборудования пользователя инициируется с вероятностью инициирования, соответствующей текущему положению оборудования пользователя.
Если оборудование пользователя инициировало процедуру детектирования соседней соты на разных частотах, базовая станция может инициировать, в соответствии с отчетом об измерениях оборудования пользователя и информацией о положении оборудования пользователя, передачу оборудования пользователя соседней соты на разных частотах и/или процедуру загрузки несущей оборудования пользователя в соответствующие моменты времени. Если оборудование пользователя не инициировало процедуру детектирования соседней соты на разных частотах, базовая станция может продолжить получение информации о положении оборудования пользователя в соответствующем цикле получения, рассчитывать скорость движения и направление движения оборудования пользователя, в соответствии с измеренным множеством информации о положении оборудования пользователя, рассчитывать время treaction реакции и сравнивать расчетное время treaction реакции с заданным пороговым значением Treaction времени реакции.
Затем оборудование пользователя заканчивает передачу оборудования пользователя соты на разных частотах и/или загрузку несущей, и базовая станция заканчивает соответствующие операции, реализуя, таким образом, процедуру детектирования малой соты на основе положения.
Вариант 2 осуществления
Вариант 2 осуществления, по существу, является таким же, как и вариант 1 осуществления, и основное различие состоит в следующем: в варианте 2 осуществления скорость движения оборудования пользователя постоянно изменяется. Различия между подходами к воплощению варианта 2 осуществления и варианта 1 осуществления подробно описаны ниже.
Когда оборудование пользователя первоначально появляется во внешней области, базовая станция рассчитывает скорость движения оборудования пользователя, в соответствии с полученной множественной информацией о положении оборудования пользователя, и обновляет цикл получения оборудования пользователя, в соответствии с рассчитанной скоростью движения.
Когда базовая станция определяет, что оборудование пользователя расположено в пределах удаления границы, соответствующей малой соте, базовая станция может рассчитывать среднее значение множества значений скорости движения оборудования пользователя в пределах прошедшего заданного периода времени, и определять, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты в соответствии с рассчитанным средним значением множества значений скорости движения. Если оборудование пользователя не удовлетворяет исходному условию детектирования малой соты, тогда процедуру детектирования малой соты прекращают до тех пор, пока оборудование пользователя не станет удовлетворять исходному условию детектирования малой соты.
Другие подходы к обработке варианта 2 осуществления являются таким же, как и вариант 1 осуществления, и их детали не будут здесь повторяться.
Вариант 3 осуществления
Вариант 3 осуществления, по существу, является таким же, как и вариант 1 осуществления, и основное различие состоит в следующем: в варианте 3 осуществления положение, в котором первоначально появляется оборудование пользователя, находится в пределах удаления границы, соответствующей малой соте. Разница между подходами к воплощению варианта 3 осуществления и варианта 1 осуществления будет подробно описана ниже.
Удаление границы, соответствующая малой соте, установлено, как принятое по умолчанию значение, которое соответствует более высокой скорости движения среди скоростей движения оборудования пользователя.
Базовая станция получает информацию о положении оборудования пользователя в соответствующем цикле и рассчитывает скорость движения и/или направление движения оборудования пользователя в соответствии с полученной множественной информацией о положении оборудования пользователя.
Когда базовая станция определяет, что оборудование пользователя выходит за пределы удаления границы, соответствующей малой соте, и выходит во внешнюю область, базовая станция, соответственно, выполняет определение положения в оборудовании пользователя с низкой точностью. Кроме того, когда базовая станция определяет, что оборудование пользователя приближается к зоне охвата малой соты, инициируется измерение соседней соты на разных частотах оборудованием пользователя, в соответствии с описанным выше способом.
Другие подходы к обработке варианта 3 осуществления являются таким же, как и в варианте 1 осуществления, и конкретные их детали не будут здесь повторяться.
Конфигурация устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения, будет описана со ссылкой на фиг. 10, представленную ниже. На фиг. 10 показана блок-схема, иллюстрирующая конфигурацию устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 10, устройство 1000 в системе беспроводной передачи данных может включать в себя модуль 1002 измерения угла прибытия, модуль 1004 измерения времени прохождения сигнала в прямом и обратном направлениях и модуль 1006 определения положения.
Модуль 1002 измерения угла прибытия может измерять угол прибытия сигнала, переданного базовой станцией из оборудования пользователя; модуль 1004 измерения времени прохождения сигнала в прямом и обратном направлениях может измерять время прохождения сигнала в прямом и обратном направлениях, требуемое для одного прохождения сигнала в прямом и обратном направлениях между оборудованием пользователя и базовой станцией; и модуль 1006 определения положения может определять положение оборудования пользователя в соответствии с углом прибытия и временем прохождения сигнала в прямом и обратном направлениях. В частности, модуль 1004 измерения времени прохождения сигнала в прямом и обратном направлениях использует опережение по времени оборудования пользователя для выполнения измерения в оборудовании пользователя, для получения времени прохождения сигнала в прямом и обратном направлениях.
В соответствии с другим вариантом осуществления изобретения, описанное выше устройство может дополнительно включать в себя модуль приема и модуль коррекции. Модуль приема может принимать информацию о положении из системы Глобальной спутниковой навигации, переданной в отчете оборудования пользователя, и модуль коррекции может рассчитывать коэффициент коррекции ошибок с информацией о положении из системы Глобальной спутниковой навигации, в качестве опорного значения, и корректировать положение, используя коэффициент коррекции ошибок.
Способ для использования в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения, будет описан со ссылкой на фиг. 11, представленную ниже. На фиг. 11 показана блок-схема последовательности операций, иллюстрирующая способ для использования в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения.
Как показано на фиг. 11, способ начинается с этапа 1100. После этапа 1100 способ переходит на этап 1102 или этап 1104.
Этап 1102 представляет собой этап измерения угла прибытия. На этапе 1102 измеряют угол прибытия сигнала, переданного в базовую станцию из оборудования пользователя.
Этап 1104 представляет этап измерения времени прохождения сигнала в прямом и обратном направлениях. На этапе 1104 измеряют время прохождения сигнала в прямом и обратном направлениях, требуемое для одного прохождения сигнала в прямом и обратном направлениях между оборудованием пользователя и базовой станцией. На этапе измерения времени прохождения сигнала в прямом и обратном направлениях используют опережение по времени оборудования пользователя для выполнения измерения в оборудовании пользователя, для получения времени прохождения сигнала в прямом и обратном направлениях.
После этапа 1102 или этапа 1104, способ переходит на этап 1106.
Этап 1106 представляет собой этап определения положения. На этапе 1106 определяют положение оборудования пользователя в соответствии с углом прибытия и временем прохождения сигнала в прямом и обратном направлениях.
Далее, в соответствии с другим вариантом осуществления изобретения, описанный выше способ может дополнительно включать в себя этап приема и этап коррекции. На этапе приема принимают информацию о положении из системы Глобальной спутниковой навигации, передаваемой в отчете оборудования пользователя, и на этапе коррекции рассчитывают коэффициент коррекции ошибок, используя информацию о положении из системы Глобальной спутниковой навигации, в качестве опорного значения, и определенное положение корректируют, используя коэффициент коррекции ошибок.
Способ, показанный на фиг. 11, представляет собой способ, соответствующий устройству, описанному на фиг. 10, и конкретные его детали не будут здесь повторяться.
Далее, в варианте осуществления заявки дополнительно предложен программный продукт, который содержит исполняемые устройством инструкции, которые при исполнении в устройстве обработки информации, обеспечивают выполнение устройством обработки информации описанного выше способа, для использования в системе беспроводной передачи данных, в соответствии с вариантами осуществления изобретения.
Далее, в варианте осуществления заявки дополнительно предложен носитель информации, содержащий считываемые устройством программные коды, которые при их исполнении в устройстве обработки информации обеспечивают выполнение устройством обработки информации описанного выше способа для использования в системе беспроводной передачи данных, в соответствии с вариантами осуществления изобретения.
В соответствии с этим, носитель информации, в котором содержится описанный выше программный продукт, содержащий считываемые устройством коды инструкций, также включен в раскрытие изобретения. Носитель информации включает в себя, но без ограничения, гибкий диск, оптический диск, магнитооптический диск, карту накопителя, устройство памяти в виде стержня и т.п.
Устройства в системе беспроводной передачи данных, в соответствии с вариантом осуществления изобретения и составляющие их компоненты, могут быть выполнены в виде программного обеспечения, встроенного программного обеспечения, аппаратных средств или их комбинаций. Конкретное средство или подходы, доступные для конфигурации, хорошо известны специалисту в данной области техники, их подробное описание здесь не представлено. В случае выполнения в программном обеспечении или встроенном программном обеспечении, программу, составляющую программное обеспечение, устанавливают с носителя информации или через сеть в устройство обработки информации со специализированной аппаратной структурой, например, в устройство 1200 обработки информации, представленное на фиг. 12, которое может выполнять различные функции, когда в нем установлены различные программы.
На фиг. 12 схематично показана блок-схема, иллюстрирующая устройство обработки информации, которое может использоваться для воплощения варианта осуществления изобретения.
На фиг. 12 центральное процессорное устройство (CPU) 1201 выполняет различную обработку в соответствии с программой, сохраненной в постоянном запоминающем устройстве (ROM) 1202 или загружаемой из участка 1208 накопителя в оперативное запоминающее устройство (RAM) 1203, в котором также содержаться данные, требуемые, когда CPU 1201 выполняет различную обработку, в соответствии с необходимостью. CPU 1201, ROM 1202 и RAM 1203 соединены друг с другом через шину 1204, с которой также соединен интерфейс 1205 ввода-вывода.
Следующие компоненты соединены с интерфейсом 1205 ввода-вывода: участок 1206 ввода, включающий в себя клавиатуру, "мышь" и т.д.; участок 1207 вывода, включающий в себя дисплей, например, электронно-лучевую трубку (CRT), жидкокристаллический дисплей (LCD) и т.д., громкоговоритель и т.д.; участок 1208 накопителя, включающего в себя жесткий диск и т.д.; и участок 1209 передачи данных, включающий в себя карту сетевого интерфейса, например, карту LAN, модем и т.д. Участок 1209 передачи данных выполняет обработку передачи данных черезо сеть, например, Интернет. Привод 1210 также соединяют с интерфейсом 1205 ввода-вывода, в соответствии с необходимостью. Съемный носитель 1211 информации, например, магнитный диск, оптический диск, магнитооптический диск, полупроводниковое запоминающее устройство и т.д., может быть установлен в привод 1210, в соответствии с необходимостью таким образом, что компьютерная программа, выбираемая из него, может быть установлена в участке 1208 накопителя, в соответствии с необходимостью.
В случае, когда представленные выше последовательности обработки выполняются как программное обеспечение, программу, составляющую программное обеспечение, устанавливают через сеть, например, Интернет и т.д., или с носителя информации, например, со съемного носителя 1211 информации и т.д.
Для специалиста в данной области техники должно быть понятно, что такой носитель информации не будет ограничен съемным носителем 1211 информации, представленным на фиг. 12, в котором сохранена программа и который распределяется отдельно от устройства, для предоставления для пользователя программы. Примеры съемного носителя 1211 информации включают в себя магнитный диск (включая в себя гибкий диск (зарегистрированный товарный знак)), оптический диск (включая в себя постоянное запоминающее устройство на компактном диске (CD-ROM) и цифровой универсальный диск (DVD)), магнитооптический диск (включая в себя мини-диск (MD) (зарегистрированный товарный знак)) и полупроводниковое запоминающее устройство. В качестве альтернативы носитель информации может представлять собой ROM 1202, жесткий диск, включенный в участок 1208 накопителя, и т.д., в котором сохранена программа, и который распределяется вместе с устройством, включающим его в себя, для пользователя.
Коды инструкции, когда их считывают и выполняют устройством, могут выполнять описанный выше способ для использования в системе беспроводной передачи данных, в соответствии с вариантами осуществления изобретения.
Для специалиста в данной области техники будет очевидно, что множество модификаций и вариаций могут быть выполнены без выхода за пределы объема и сущности изобретения. Выбор и пояснения вариантов осуществления предназначены для наилучшего пояснения принципов и фактических вариантов применения, и обычно обеспечивают для специалиста в данной области техники возможность определять, что изобретение может иметь различные подходы к воплощению с различными модификациями, пригодными для требуемого конкретного использования.
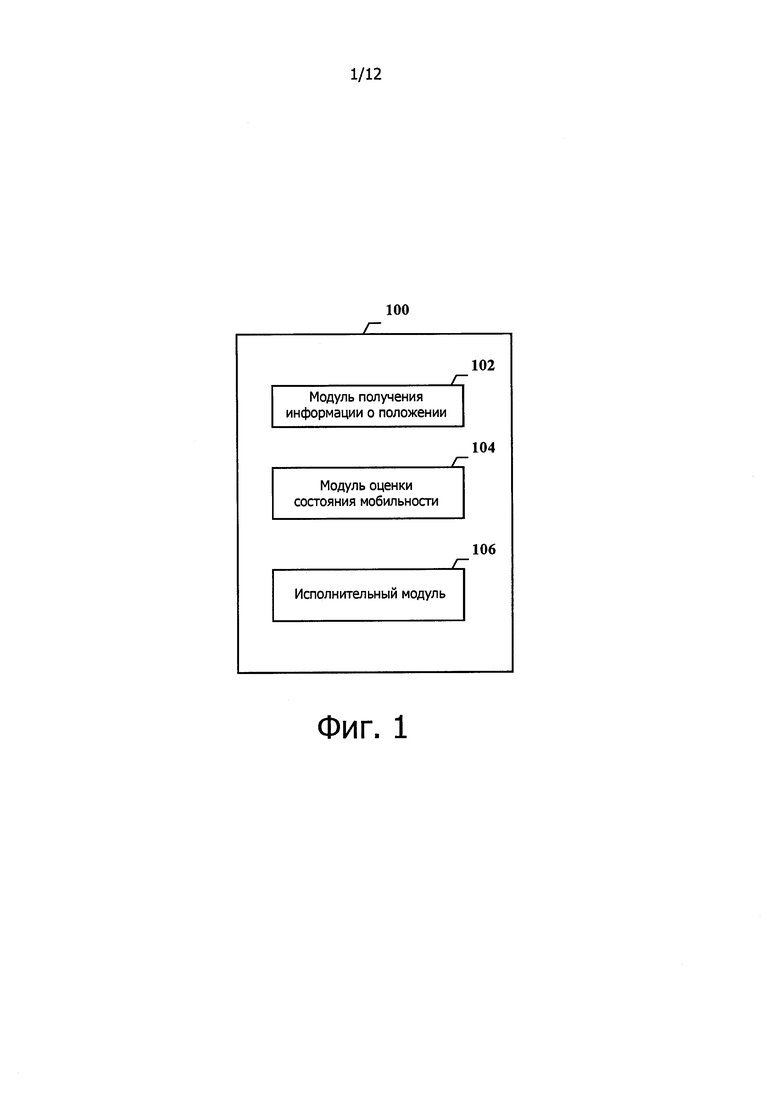

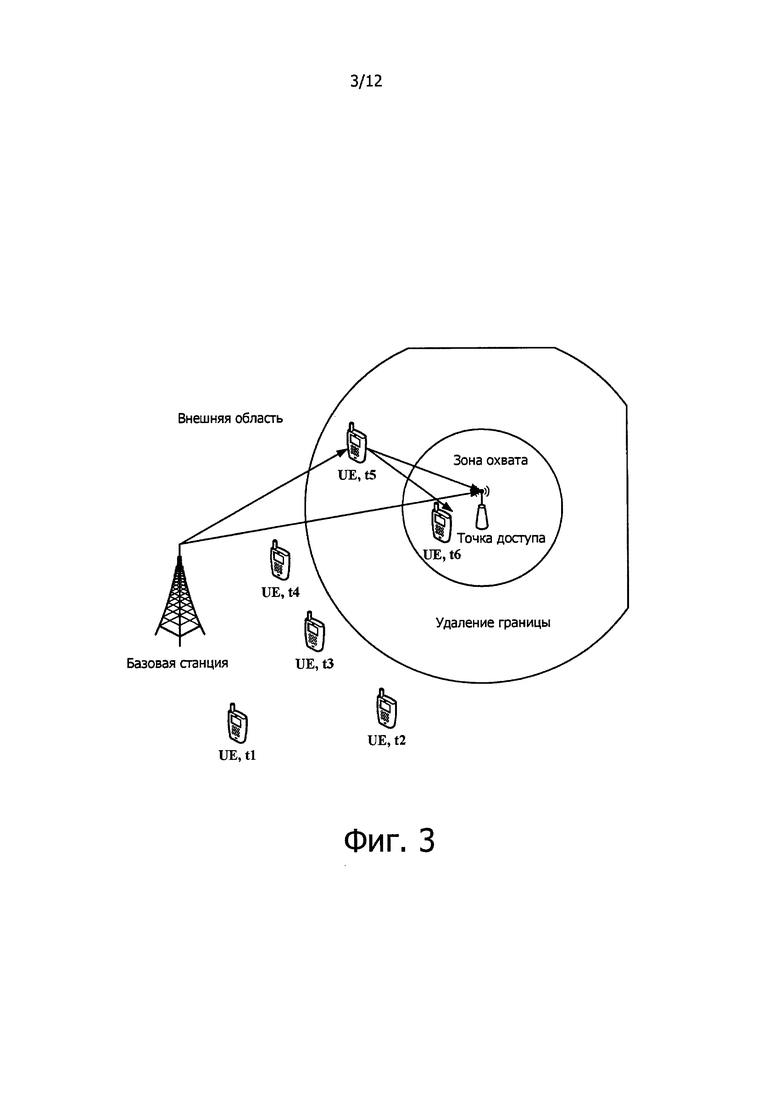




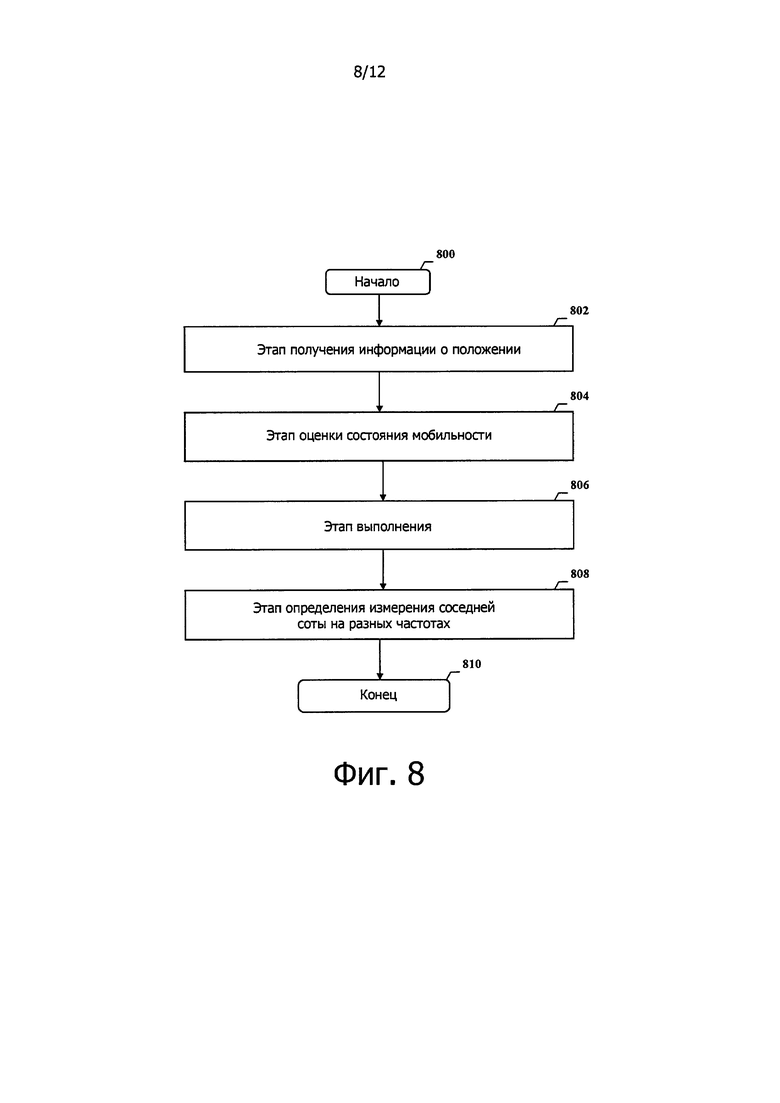

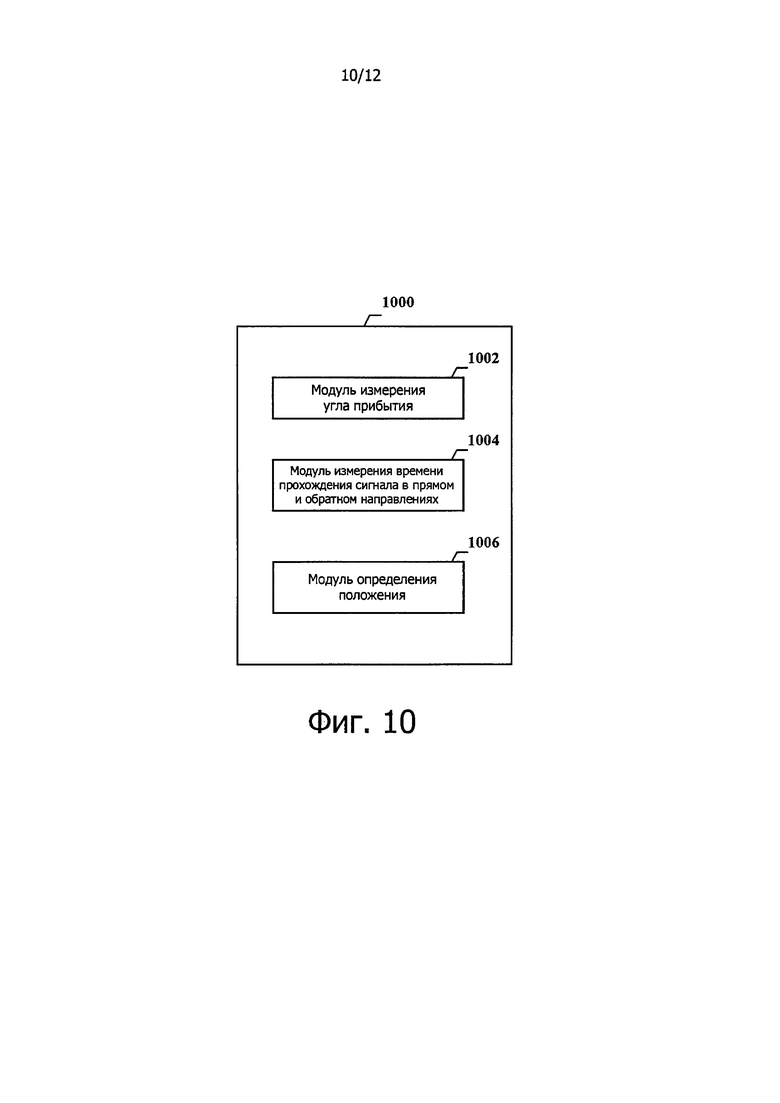


Изобретение относится к мобильной связи. Устройство беспроводной передачи данных содержит: модуль (102) получения информации о положении, предназначенный для получения информации о положении мобильного терминала; модуль (104) оценки состояния мобильности, предназначенный для использования при оценке состояния мобильности мобильного терминала на основе информации о положении мобильного терминала в разное время; и исполнительный модуль (106) для использования при выполнении, на основе информации о положении мобильного терминала и изменения состоянии мобильности, соответствующей операции, относящейся к обнаружению микросоты. Технический результат заключается в улучшении эффективности обнаружения малой соты, что обеспечивает стабильный сетевой охват без стыков для пользователя. 4 н. и 14 з.п. ф-лы, 12 ил.
1. Устройство в системе беспроводной передачи данных, содержащее:
модуль получения информации о положении, для получения информации о положении оборудования пользователя;
модуль оценки состояния мобильности для оценки состояния мобильности оборудования пользователя в соответствии с информацией о положении оборудования пользователя, полученной в разное время; и
исполнительный модуль для исполнения соответствующих операций, относящихся к детектированию малой соты, в соответствии с изменениями в состоянии мобильности и информацией о положении оборудования пользователя, в котором модуль оценки состояния мобильности дополнительно выполнен с возможностью расчета скорости движения и/или направления движения оборудования пользователя, в соответствии с множеством информации о положении оборудования пользователя, получаемой в разное время, и
в котором модуль оценки состояния мобильности дополнительно выполнен с возможностью определения граничной зоны, соответствующей малой соте, в соответствии с величиной скорости движения оборудования пользователя, и исполнительный модуль дополнительно выполнен с возможностью определения путем сравнения расстояния между оборудованием пользователя и малой сотой с граничной зоной, приближается ли оборудование пользователя к малой соте.
2. Устройство по п. 1, в котором модуль получения информации о положении выполняет определение положения для оборудования пользователя в соответствии со временем прохождения сигнала в прямом и обратном направлениях и углом прибытия, который получают путем выполнения измерения в оборудовании пользователя для получения информации о положении оборудования пользователя, в котором время прохождения сигнала в прямом и обратном направлениях получают путем выполнения измерения в оборудовании пользователя, используя информацию опережения по времени оборудования пользователя в модуле получения информации о положении.
3. Устройство по п. 2, в котором модуль получения информации о положении выполняет измерение в оборудовании пользователя множество раз, в заданном цикле выборки, в пределах заданного окна времени выборки, для получения множества измерений времени прохождения сигнала в прямом и обратном направлениях и множества углов прибытия.
4. Устройство по п. 2, в котором модуль получения информации о положении рассчитывает коэффициент коррекции ошибок, используя результат измерений, получаемых с применением системы Глобальной спутниковой навигации, в качестве опорного значения, и корректирует положение, используя коэффициент коррекции ошибок.
5. Устройство по п. 1, в котором операции, относящиеся к детектированию малой соты, которые выполняет исполнительный модуль, включают в себя одну или больше из следующих операций: определение в соответствии с расстоянием между оборудованием пользователя и малой сотой, приближается ли оборудование пользователя к малой соте, или определение, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты.
6. Устройство по п. 1, в котором множество информации о положении оборудования пользователя в разное время получают в заданном цикле получения, и исполнительный модуль дополнительно выполнен с возможностью обновления цикла получения оборудования пользователя в соответствии с текущей скоростью движения оборудования пользователя.
7. Устройство по п. 1, в котором модуль оценки состояния мобильности дополнительно выполнен с возможностью классификации скорости движения оборудования пользователя на разные уровни скорости, и исполнительный модуль дополнительно выполнен с возможностью классификации на разные области, используя критерии разделения области, соответствующие уровням скорости оборудования пользователя, положения, где расположено оборудование пользователя.
8. Устройство по п. 1, в котором модуль оценки состояния мобильности дополнительно выполнен с возможностью классификации малых сот, расположенных рядом друг с другом в один кластер, и для расчета объединения значений граничной зоны, в соответствии с соответствующими малыми сотами в одном кластере, в качестве граничной зоны, соответствующей одному кластеру.
9. Устройство по п. 1, в котором множество информации о положении оборудования пользователя в разные моменты времени получают в заданном цикле получения, и исполнительный модуль дополнительно выполнен с возможностью установки более длительного цикла получения, если оборудование пользователя расположено за пределами граничной зоны, и для установки более короткого цикла получения, если оборудование пользователя расположено в пределах граничной зоны.
10. Устройство по п. 1, в котором исполнительный модуль дополнительно выполнен с возможностью определения, удовлетворяет ли оборудование пользователя исходному условию детектирования малой соты, в случае когда оборудование пользователя расположено в пределах граничной зоны, исходное условие представляет собой одно или больше из: оборудование пользователя не находится в состоянии мобильности с высокой скоростью; и малая сота находится в хорошем состоянии по нагрузке и имеет остаточные ресурсы для доступа оборудования пользователя.
11. Устройство по п. 10, в котором модуль оценки состояния мобильности дополнительно выполнен с возможностью расчета в соответствии с информацией о положении скорости движения и направления движения оборудования пользователя, времени пребывания, требуемого для оборудования пользователя для перемещения через малую соту, и для сравнения расчетного времени пребывания с заданным пороговым значением времени пребывания, для оценки, находится ли оборудование пользователя в состоянии мобильности с невысокой скоростью.
12. Устройство по п. 1 или 10, дополнительно содержащее: модуль определения измерений малой соты на разных частотах, предназначенный для определения, следует ли инициировать измерение соседних сот на разных частотах в оборудовании пользователя.
13. Устройство по п. 12, в котором
модуль оценки состояния мобильности дополнительно выполнен с возможностью расчета в соответствии с информацией о положении скорости движения и направления движения оборудования пользователя, времени реакции на прибытие оборудования пользователя в зоне охвата малой соты и
модуль определения измерений соседней соты на разных частотах дополнительно выполнен с возможностью сравнения расчетного времени реакции с заданным пороговым значением времени реакции для определения, следует ли инициировать измерение соседней соты на разных частотах в оборудовании пользователя.
14. Устройство по п. 12, в котором
модуль оценки состояния мобильности дополнительно выполнен с возможностью разделения граничной зоны на множество подобластей, при этом каждая подобласть соответствует заданной вероятности инициирования, и дополнительно выполнен с возможностью определения, в соответствии с информацией о положении оборудования пользователя, подобласти, где расположено оборудование пользователя и его соответствующей вероятности инициирования, и
модуль определения измерения соседней соты на разных частотах дополнительно выполнен с возможностью инициирования измерения соседней соты на разных частотах в оборудование пользователя в соответствии с определенной вероятностью инициирования соответствующей подобласти, где находится оборудование пользователя.
15. Устройство по п. 12, дополнительно содержащее: модуль определения доступа к соседней соте на разных частотах в соответствии с отчетом об измерениях оборудования пользователя и информации о положении оборудования пользователя, следует ли инициировать передачу оборудования пользователя в соте на разных частотах и/или загрузку несущей оборудования пользователя, в случае когда в оборудовании пользователя было инициировано измерение соседней соты на разных частотах.
16. Способ для использования в системе беспроводной передачи данных, содержащий:
этап получения информации о положении, состоящий в получении информации о положении оборудования пользователя;
этап оценки состояния мобильности, состоящий в оценке состояния мобильности оборудования пользователя в соответствии с информацией о положении оборудования пользователя в разное время; и
этап выполнения, состоящий в выполнении соответствующих операций, относящихся к детектированию малой соты, в соответствии с изменениями в состоянии мобильности и информацией о положении оборудования пользователя,
в котором на этапе оценки состояния мобильности дополнительно рассчитывают скорость движения и/или направления движения оборудования пользователя в соответствии с множеством информации о положении оборудования пользователя, получаемой в разное время, и
в котором на этапе оценки состояния мобильности дополнительно определяют граничную зону, соответствующую малой соте, в соответствии с величиной скорости движения оборудования пользователя, и на этапе выполнения дополнительно определяют путем сравнения расстояния между оборудованием пользователя и малой сотой с граничной зоной, приближается ли оборудование пользователя к малой соте.
17. Компьютерный носитель информации, содержащий считываемые компьютером инструкции, которые обеспечивают выполнение компьютером способа по п. 16.
18. Устройство в системе беспроводной передачи данных, содержащее запоминающее устройство, сохраняющее компьютерные инструкции, и процессор для выполнения компьютерных инструкций, сохраненных в запоминающем устройстве для выполнения способа по п. 16.
| ALCATEL-LUCENT SHANGHAI BELL, ALCATEL-LUCENT, Network-Assisted Inter-frequency Pico Cell Discovery in LTE HetNets, 3GPP TSG-RAN WG2 meeting #77 bis (R2-121709) Jeju Island, Korea, 26.03.2012 (найден 14.11.2017), найден в Интернет http://www.3gpp.org/DynaReport/TDocExMtg--R2-77b--29007.htm | |||
| US 2004097234 A1, 20.05.2005 | |||
| ALCATEL-LUCENT SHANGHAI BELL, ALCATEL-LUCENT, UE speed-based methods and mobility state estimation for improving the mobility performance in HetNets3GPP TSG-RAN WG2 meeting #77 bis (R2-121707) Jeju Island, Korea, 26.03.2012 (найден 14.11.2017), найден в Интернет http://www.3gpp.org/DynaReport/TDocExMtg--R2-77b--29007.htm | |||
| NOKIA SIEMENS NETWORKS, NOKIA CORPORATION, Enhancements for Small Cell Detection, 3GPP TSG-RAN WG2 Meeting #77 (R2-120523) Dresden, Germany, 06.02.2012, (найден 14.11.2017), найден в Интернет http://www.3gpp.org/DynaReport/TDocExMtg--R2-77--29006.htm | |||
| US 2012295642 A1, 22.11.2012 | |||
| ЧУВСТВИТЕЛЬНОЕ К СКОРОСТИ УПРАВЛЕНИЕ МОЩНОСТЬЮ | 2003 |
|
RU2323523C2 |

